
Синхронный реактивный двигатель
Дмитрий Левкин
- Конструкция
- Принцип работы
- Особенности
Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.
Синхронный реактивный двигатель
Статор синхронного реактивного электродвигателя с распределенной обмоткой
Выделяют три основных типа ротора реактивного двигателя: ротор с явновыраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
Ротор с явновыраженными полюсами
Аксиально-расслоенный ротор
Поперечно-расслоенный ротор
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи.
Линии магнитного поля синхронного реактивного электродвигателя
Главная идея может быть объяснена с помощью рисунка представленного ниже. Объект «a» состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта «b» имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту «a», создает вращающий момент если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта «a» не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле
Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q (). Если угол сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
Ток статора отвечает за намагничивание и за создание момента, который пытается уменьшить искаженность поля. Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.
- Преимущества:
- Простая и надежная конструкция ротора:
ротор имеет простую конструкцию, состоящую из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки. - Низкий нагрев:
так как в роторе отсутствуют токи, он не нагревается во время работы, увеличивая срок службы электродвигателя.
- Нет магнитов:
снижается конечная цена электродвигателя, так как при производстве не используются редко земельные металлы. При отсутствии магнитных сил упрощается содержание и техническое обслуживание электродвигателя. - Низкий момент инерции ротора
так как на роторе отсутствует обмотка и магниты, момент инерции ротора ниже, что позволяет электродвигателю быстрее набирать обороты и экономить электроэнергию. - Возможность регулирования скорости:
в виду того, что синхронный реактивный электродвигатель для своей работы требует частотный преобразователь, имеется возможность управления скоростью вращения реактивного двигателя в широком диапазоне скоростей.

- Недостатки:
- Частотное управление:
для работы требуется частотный преобразователь. - Низкий коэффициент мощности:
из-за того, что магнитный поток создается только за счет реактивного тока.
Смотрите также
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Библиографический список
Синхронные реактивные двигатели
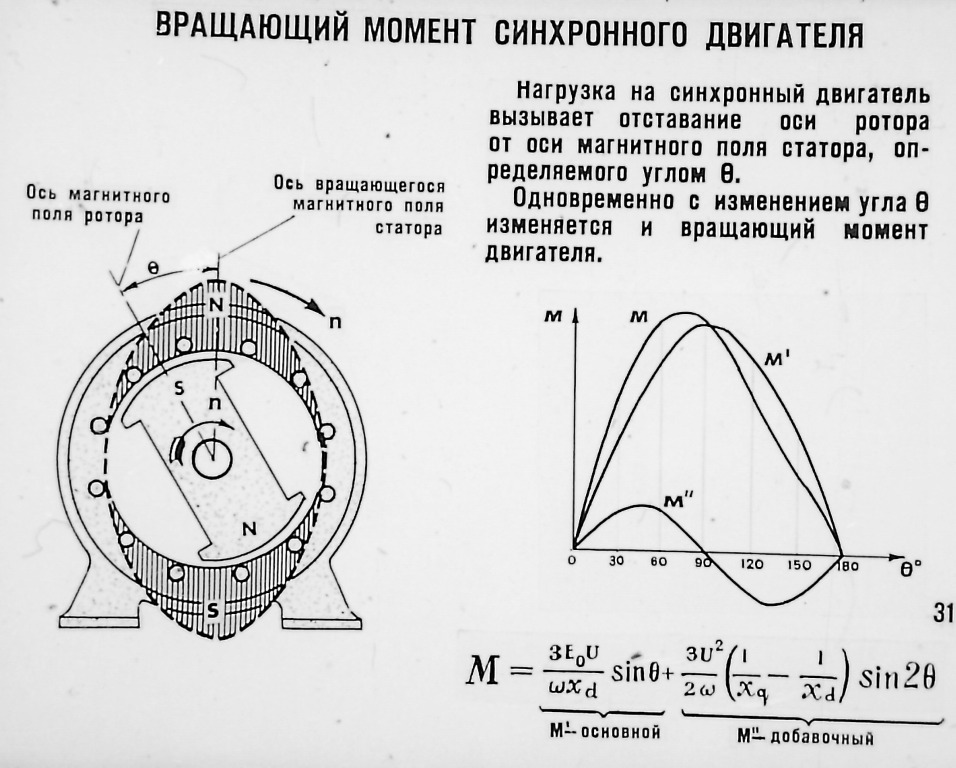
Синхронный реактивный электродвигатель — синхронный электродвигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов.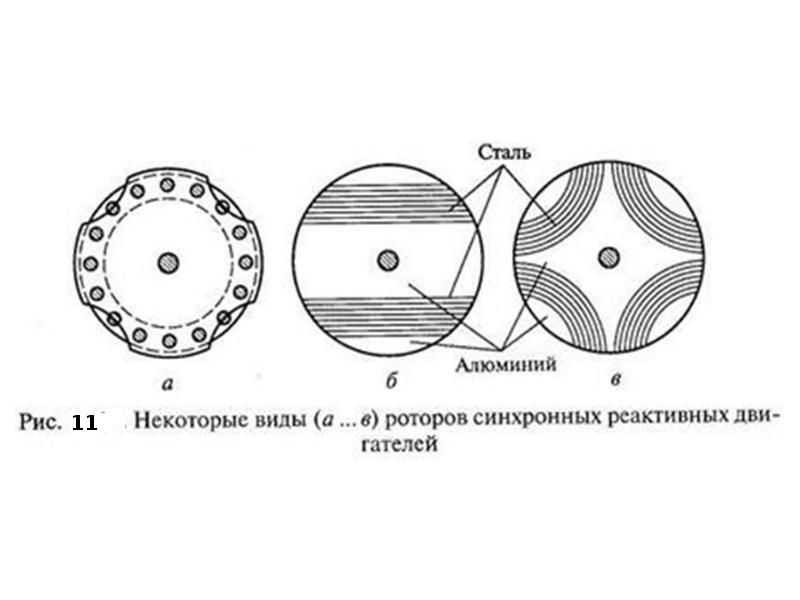
Принцип работы синхронного реактивного двигателя
В синхронных реактивных электродвигателях принцип создания момента вращения ротора несколько отличается от асинхронных и традиционных синхронных двигателей. Здесь решающая роль отводится самому сердечнику ротора.
Ротор реактивного синхронного двигателя не имеет обмоток, даже короткозамкнутой обмотки на нем нет. Вместо этого сердечник ротора сделан сильно неоднородным по магнитной проводимости: магнитная проводимость вдоль ротора отличается от магнитной проводимости поперек. Благодаря такому необычному подходу отпадает необходимость как в обмотках ротора, так и в постоянных магнитах на нем.
Что касается статора, то обмотка статора реактивного синхронного двигателя может быть сосредоточенной либо распределенной, при этом сердечник статора и корпус остаются обычными. Вся особенность — в сильно неоднородном сердечнике ротора.
Для реактивных синхронных двигателей характерны три основных типа роторов: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор.
Физика процесса следующая. Переменный ток подается на обмотки статора, и создает вокруг ротора вращающееся магнитное поле, которое максимально в воздушном зазоре между статором и ротором. Момент вращения получается благодаря тому, что ротор все время пытается повернуться так, чтобы магнитное сопротивление для формируемого статором магнитного потока оказалось бы минимальным.
Максимальный момент вращения оказывается прямо пропорциональным разнице между продольной и поперечной индуктивностями, и чем больше эта разница, тем большим получается вращающий момент ротора.
Для понимания данного принципа обратимся к рисунку. Анизотропный объект 1 обладает различной магнитной проводимостью по осям a и b. При этом изотропный объект 2 обладает одинаковой магнитной проводимостью по всем направлениям. Приложенное к объекту 1 магнитное поле порождает момент вращения когда угол между осью b и линиями магнитной индукции B не равен нулю. Когда неравный нулю угол существует, объект 1 станет искажать приложенное магнитное поле B, и направление искажения будет совпадать с осью a объекта 1.
Синусоидальное магнитное поле, создаваемое в синхронном реактивном двигателе обмоткой статора, вращается с определенной синхронной угловой частотой, и следовательно всегда будет иметь место момент вращения, стремящийся вернуть систему в состояние с наименьшим значением полной потенциальной энергии.
То есть момент вращения будет все время стремиться уменьшить искажение магнитного поля статора в направлении оси a, путем уменьшения угла между линиями индукции B и осью b. Так, если управление двигателем направлено на сохранение постоянства этого угла, то и механическая энергия постоянно будет получаться из электромагнитной.
Таким образом, ток обмотки статора обеспечивает намагничивание с существованием вращающего момента, направленного на устранение искаженности поля, и управляя фазой тока в соответствии с положением ротора во вращающейся системе координат (в соответствии со значением угла искажений), получается управление моментом синхронного реактивного электродвигателя.
Синхронные реактивные электродвигатели сегодня
Ведущие мировые производители электродвигателей на сегодняшний день проявляют особый интерес к синхронным реактивным электродвигателям, хотя запатентованы первые версии были еще в конце 19 века. Дело в том, что КПД синхронных реактивных электродвигателей принципиально значительно превышает КПД популярных асинхронных электродвигателей, не говоря уже об удельной мощности.
Потери энергии в роторе отсутствуют, а ведь обычно процентов 30 потерь приходится именно на ротор. Так повышается и срок службы электродвигателя — снижается вредный нагрев. Масса синхронного реактивного электродвигателя и его габариты на 20% меньше чем у асинхронного той же мощности.
Возобновленный интерес к синхронным реактивным электродвигателям в наши дни связан прежде всего с широкими возможностями современного компьютерного моделирования, позволяющими находить наиболее эффективные версии конструкций роторов и статоров — научные исследования получаются более продуктивными, и КПД современных версий синхронных реактивных двигателей уже достигает 98%, в то время как для асинхронных версий КПД традиционно не превышает 90%.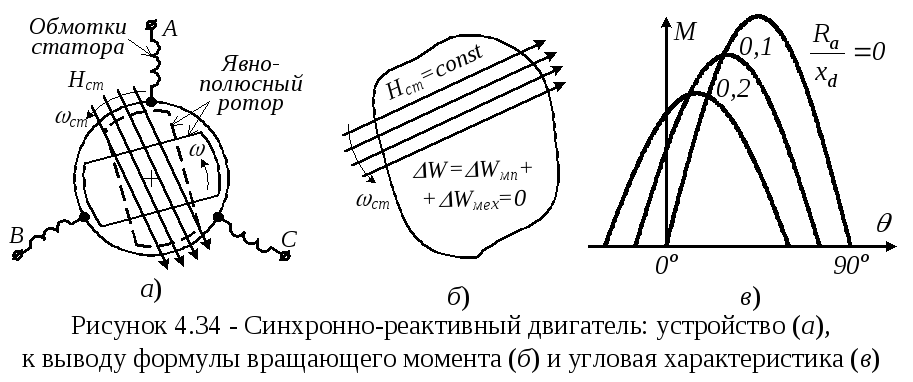
Синхронные реактивные двигатели изготавливают сегодня на базе асинхронных, и при тех же габаритах и установочно-присоединительных размерах получается более высокий КПД, достигается более высокая удельная мощность.
Преимущества и недостатки
Набранный из тонколистовой электротехнической стали, ротор реактивного синхронного двигателя имеет простую и надежную конструкцию без короткозамкнутой обмотки и без магнитов, поэтому в роторе исключены токи вызывающие вредный нагрев, — срок службы повышается, а отсутствие магнитов удешевляет себестоимость продукта, включая до минимума сниженные затраты на техобслуживание.
Благодаря сравнительной легкости ротора, его собственный момент инерции низок, поэтому двигатель быстрее разгоняется до номинальных оборотов, что приводит к экономии электроэнергии.
Частотный преобразователь в качестве регулятора скорости делает управление двигателем очень гибким в широком диапазоне рабочих скоростей. Что касается недостатков, то он всего один: потребность в преобразователе частоты.
Применение преобразователя частоты с активной коррекцией коэффициента мощности позволяет добиться максимального коэффициента мощности системы, что очень важно на любом современном производстве.
Ранее ЭлектроВести писали, что калифорнийская компания HyPoint утверждает, что ее новая конструкция топливного элемента с турбонаддувом позволяет в три раза увеличить мощность и в четыре раза срок службы обычного топливного элемента, открывая возможность создания высокоскоростных дальнемагистральных электрических самолетов VTOL с водородным двигателем. Плотность энергии новой системы в 3 раза выше, чем у литий-ионных аккумуляторов.
По материалам: electrik.info.
Синхронные реактивные двигатели — Двигатели ABB Process Performance (Двигатели низкого напряжения IEC и руководства по двигателям ABB)
Технология синхронных реактивных двигателей сочетает в себе характеристики двигателей с постоянными магнитами с простотой и удобством обслуживания асинхронных двигателей, поскольку в их состав не входят редкоземельные материалы. постоянные магниты. Ротор синхронного реактивного двигателя не имеет магнитов или обмоток и практически не испытывает потерь мощности. А поскольку в роторе нет магнитных сил, техническое обслуживание так же просто, как и в случае с асинхронными двигателями.
постоянные магниты. Ротор синхронного реактивного двигателя не имеет магнитов или обмоток и практически не испытывает потерь мощности. А поскольку в роторе нет магнитных сил, техническое обслуживание так же просто, как и в случае с асинхронными двигателями.
- Уменьшите воздействие на окружающую среду, используя меньше электроэнергии и сокращая выбросы CO2.
- Повысьте устойчивость, соблюдая текущие и будущие стандарты эффективности, а также повышая эффективность и производительность.
- Повысьте свою надежность и обеспечьте наиболее устойчивую и долговечную работу за счет сведения к минимуму отказов двигателей и времени простоя.
- Повысьте качество своего производства за счет точного контроля крутящего момента и скорости
- Обновите свои модификации, заменив стандартные асинхронные двигатели в любом промышленном применении
ABB IE5 SynRM и приводы — поздоровайтесь с идеальной парой!
Ассортимент продукции
| Двигатели с алюминиевой рамой | M3AL — типоразмеры IEC 132 |
| Двигатели с чугунной рамой | M3BL — типоразмеры IEC от 160 до 315 |
| Выходная мощность | от 5,5 до 315 кВт |
| Напряжение | 230–690 В |
| Двигатели с алюминиевой рамой | M3AL — типоразмеры IEC от 90 до 132 |
| Двигатели с чугунной рамой | M3BL — типоразмеры IEC от 160 до 315 |
| Выходная мощность | 1,1 до 350 кВт |
| Напряжение | 230–690 В |
Начните экономить энергию с двигателями ABB IE5 SynRM
Инструменты и услуги
Онлайн-инструмент, который поможет вам найти оптимальный электродвигатель для любого MEPS по всему миру. Это также поможет вам рассчитать стоимость владения различными двигателями и получить быстрый доступ к маркетинговой документации и чертежам, отчетам об испытаниях и таблицам технических данных.
Это также поможет вам рассчитать стоимость владения различными двигателями и получить быстрый доступ к маркетинговой документации и чертежам, отчетам об испытаниях и таблицам технических данных.
Оптимизатор | ABB
Вместо того, чтобы листать бумажные каталоги или базы данных спецификаций, найдите нужный привод, устройство плавного пуска или двигатель, ответив на ряд простых вопросов.Ссылка на селектор
Отсканируйте QR-код, чтобы получить доступ к круглосуточному самообслуживанию
ABB Access, который поможет вам легко найти актуальные данные о продуктах в Интернете. Он также обеспечивает легкий доступ к документации и руководствам. Если у вас возникнут проблемы с вашим продуктом ABB, вы можете быстро и легко сообщить об этом онлайн, чтобы получить поддержку специалистов ABB.
Подробнее
Интеллектуальный датчик ABB Ability™ превращает традиционные двигатели в интеллектуальные устройства с беспроводным подключением. Он прикреплен к раме двигателя; нет необходимости в проводке или механической обработке. Используя алгоритмы, основанные на многолетнем опыте компании ABB в области двигателей, интеллектуальный датчик ABB Ability™ передает информацию о работе и состоянии двигателя через шлюз Bluetooth или смартфон на защищенный сервер.
Используя алгоритмы, основанные на многолетнем опыте компании ABB в области двигателей, интеллектуальный датчик ABB Ability™ передает информацию о работе и состоянии двигателя через шлюз Bluetooth или смартфон на защищенный сервер.
Подробнее
загрузок
Загрузка документов
Основные моменты
27.04.2023
Сокращение выбросов углерода и затрат в водном хозяйстве: аргументы в пользу энергоэффективных двигателей
Статья
На многих объектах водоснабжения и водоотведения до сих пор используются старые, неэффективные электродвигатели. Модернизация моторных систем является ключом к сокращению затрат, удовлетворению растущего спроса и сокращению выбросов.
28.03.2023
Рекламный текст: Keep it cool: эффективное и экономичное охлаждение с двигателями и приводами
Статья
Глобальный сектор производства продуктов питания и напитков потребляет примерно 30 процентов мировой энергии. Он также отвечает за 20 процентов всех выбросов парниковых газов.
Он также отвечает за 20 процентов всех выбросов парниковых газов.
13.02.2023
ABB сотрудничает с Boliden в переходе к экономике замкнутого цикла
Статья
В высокоэффективных двигателях ABB будет использоваться переработанная и низкоуглеродистая медь от Boliden — партнерство, демонстрирующее экономику замкнутого цикла в действии.
15.02.2023
Энергоэффективность меняет правила игры с нуля
Статья
Джорис Конквит дает интервью IOTinsider о реакции отрасли на климатический кризис, технологии SynRM и важности энергоэффективности сегодня.
15.02.2023
Повышение энергоэффективности в шинной и резинотехнической промышленности
Статья
Фаусто Белотти дает интервью европейскому журналу по каучуку об энергоэффективности в шинной и резинотехнической промышленности и о том, какие выгоды компании могут ожидать от повышения эффективности своих моторов.
07.12.2022
Непревзойденная энергоэффективность с двигателями и приводом SynRM
Практический пример
В современной экономике энергоэффективность никогда не имела такого значения. Узнайте, как наши высокоэффективные двигатели и приводы сокращают выбросы, экономя ваши деньги на фоне роста затрат на электроэнергию в ключевых сегментах.
Другие истории клиентов, истории и новостиФильтровать обращения клиентов по продуктам, отраслям или приложениям.
Отправьте запрос и мы свяжемся с вами
Связаться с намиБыстро найти торгового партнера АББ
Найдите торгового партнера
Все о реактивных двигателях — что это такое и как они работают
Электрические двигатели создают механическое движение, используя преимущества электромагнетизма и основных электрических принципов, и сегодня они составляют подавляющее большинство коммерческих двигателей. Существует так много различных типов электродвигателей, что может быть трудно определить, какой из них подходит для вашего применения.
Существует так много различных типов электродвигателей, что может быть трудно определить, какой из них подходит для вашего применения.
Эта статья призвана помочь читателям понять устройство электродвигателя путем изучения его конструкции и работы; Эти машины могут быть разделены на двигатели постоянного и переменного тока в зависимости от источника питания и могут быть дополнительно классифицированы в зависимости от их метода выработки механической энергии. В этой статье основное внимание будет уделено определенному классу двигателей, известному как реактивные двигатели, которые могут относиться к любой из этих категорий в зависимости от конструкции. Мы обсудим этот усовершенствованный двигатель и его рабочие характеристики, чтобы увидеть, как определенные электромагнитные принципы, а именно сопротивление, индукция и переключение, используются для создания вращательной энергии.
Что такое Реактивные двигатели?
Несмотря на то, что реактивные двигатели были изобретены в начале 19 века, они только недавно получили распространение благодаря микроэлектронике и передовым системам управления.
Реактивный двигатель — это усовершенствованный тип двигателя, в котором используются как статоры, так и роторы, как и в большинстве электрических двигателей. Некоторые реактивные двигатели работают с точными оборотами, синхронизируя скорость ротора с вращающимся магнитным полем (RMF) статора, что делает их «синхронными» по конструкции (более подробную информацию об этом можно найти в нашей статье о синхронных двигателях). Их называют реактивными двигателями, потому что они поляризуют величину сопротивления — магнитного эквивалента электрического сопротивления — в полюсах их ротора для взаимодействия с RMF статора. Подтипы реактивных двигателей включают синхронные реактивные двигатели и вентильные реактивные двигатели, и каждый из них использует реактивное сопротивление уникальным образом.
Как работают реактивные двигатели?
Двумя основными компонентами реактивного двигателя являются внешний неподвижный статор и внутренний ротор, разделенные небольшим воздушным зазором.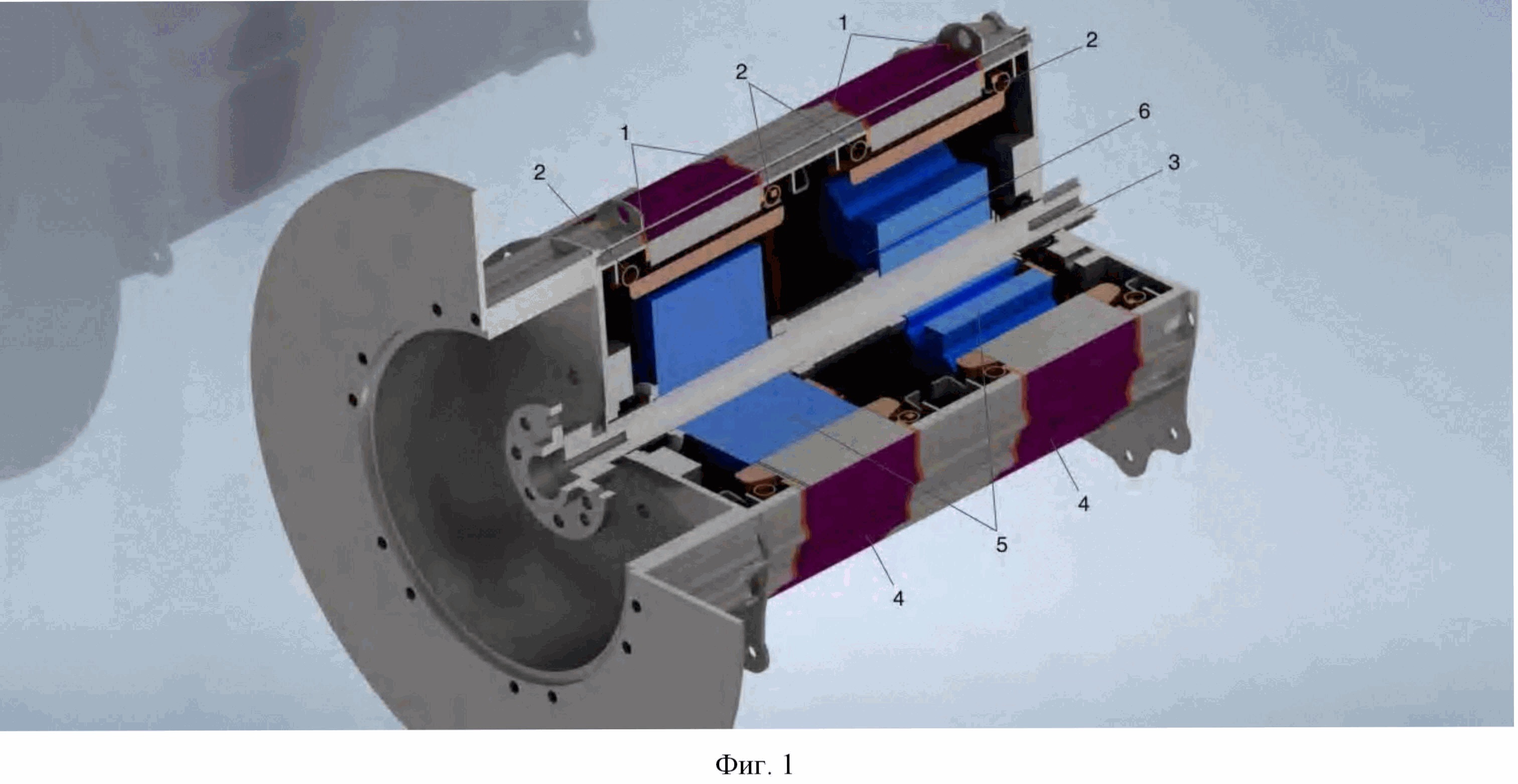 В зависимости от типа реактивного двигателя конструкция этих двух частей меняется, но основные принципы работы остаются прежними.
В зависимости от типа реактивного двигателя конструкция этих двух частей меняется, но основные принципы работы остаются прежними.
Статор состоит из выступающих «выступающих» пар полюсов, образованных протеканием тока по проводу, намотанному на эти выступы. Ротор изготовлен из ферромагнитного металла и содержит собственные полюса, повторяющие контуры магнитного поля статора (либо с выступами, либо с воздушными зазорами/выемками). Когда выступающий полюс ротора совпадает с выступающим полюсом статора, говорят, что ротор находится в положении минимального магнитного сопротивления, то есть величина магнитного «сопротивления» в этой точке наименьшая и «полностью выровнена». Когда полюс статора совпадает с выемками/барьерами/пазами ротора, говорят, что ротор находится в положении максимального сопротивления или «полностью не выровнен». Из-за сохранения энергии ротор всегда будет перемещаться в положение наименьшего сопротивления, и поэтому возникает «нежелательный» крутящий момент, когда ротор полностью не выровнен.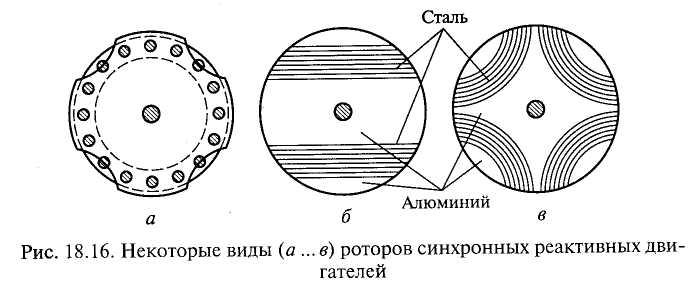 Этот крутящий момент притянет ротор к ближайшему выступающему полюсу статора и вызовет вращение. При правильном расчете времени с использованием оборудования систем управления или определенной геометрии ротора этот эффект может создавать непрерывный вращательный выходной сигнал.
Этот крутящий момент притянет ротор к ближайшему выступающему полюсу статора и вызовет вращение. При правильном расчете времени с использованием оборудования систем управления или определенной геометрии ротора этот эффект может создавать непрерывный вращательный выходной сигнал.
Существуют определенные показатели, общие для всех реактивных двигателей, и в этой статье мы кратко объясним каждый из них, чтобы помочь понять различия между типами реактивных двигателей. Они ни в коем случае не являются исчерпывающими и содержат только основные характеристики реактивных двигателей.
Тип фазы
Реактивные двигатели могут приводиться в действие однофазным или многофазным двигателем. Наиболее распространенными многофазными конструкциями являются трехфазные двигатели, которые зарезервированы для приложений с более высоким крутящим моментом, поскольку они не требуют вспомогательных обмоток и могут обеспечивать больший ток для двигателя.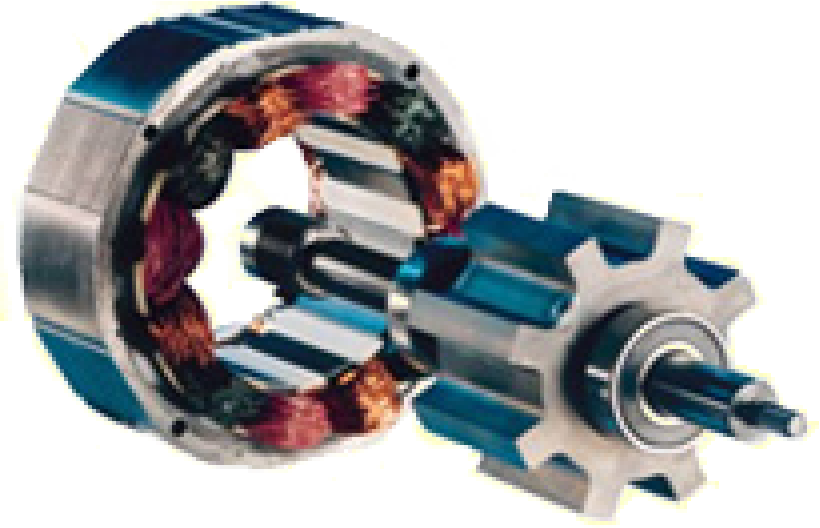 Для однофазных двигателей требуются пускатели, и дополнительную информацию можно найти в нашей статье о пускателях двигателей.
Для однофазных двигателей требуются пускатели, и дополнительную информацию можно найти в нашей статье о пускателях двигателей.
Соотношение полюсов статора и ротора
Существуют идеальные соотношения полюсов статора и ротора в зависимости от типа двигателя/желаемых выходных характеристик. Реактивные двигатели обычно имеют соотношение полюсов 6/4, 4/2, 8/6 или 12/8, хотя существуют и другие соотношения. Соотношение 1/1 лучше всего подходит для синхронных реактивных двигателей, поскольку оно обеспечивает более точную синхронизацию.
Номинальная мощность/крутящий момент
Номинальный выходной крутящий момент [с единицами ньютон-метров (Нм) или фунт-сила — футы (lbf-ft)] и мощность [с единицами измерения киловатты (кВт) или лошадиные силы (л.с.)] отображает количество выходной мощности и крутящий момент, обеспечиваемый двигателем в установившемся режиме. Номинальная мощность может варьироваться от долей лошадиных сил до сотен лошадиных сил, что показывает, насколько универсальными могут быть эти двигатели.
Пульсации крутящего момента и диапазон скоростей постоянного крутящего момента
Поскольку есть точки, в которых реактивный крутящий момент не создается (полностью выровненные положения), при вращении вала возникает периодическое изменение крутящего момента. Это может вызвать эффект «пульсации крутящего момента», когда вал испытывает крутящий момент только в этих положениях с высоким сопротивлением. Эта пульсация крутящего момента может вызвать шум и нежелательные колебания в машине. Поэтому существуют диапазоны постоянного крутящего момента для реактивных двигателей, в которых эта пульсация крутящего момента минимальна, обычно оценивается как диапазон оборотов в минуту.
Типы реактивных двигателей
Есть две основные конструкции, в которых используется реактивный двигатель: синхронный реактивный двигатель и вентильный реактивный двигатель. Каждая из этих конструкций достаточно различна, чтобы требовать отдельных объяснений, и в этом разделе будет кратко описан каждый подтип реактивного двигателя.
Синхронные реактивные двигатели
Синхронные реактивные двигатели предназначены для работы с точными «синхронными» скоростями. Они достигают этого за счет использования трехфазной обмотки статора (создающей истинное RMF) и ротора, в котором реализованы явно выраженные полюса ротора и внутренние барьеры магнитного потока (обычно пазы или воздушные зазоры внутри ротора, см. Рисунок 1). В роторе часто используется модифицированная короткозамкнутая клетка вокруг этих выступающих полюсов, так что он может извлечь выгоду из эффекта индукции и стать самозапускающимся (дополнительную информацию об этой концепции можно найти в нашей статье о двигателях с короткозамкнутым ротором). Когда двигатель запускается, он приближается к синхронной скорости за счет индукции, а затем фиксируется в синхронизме за счет реактивного момента, создаваемого магнитными барьерами ротора.
Рис. 1: Типовые конструкции синхронных реактивных двигателей.
 Обратите внимание на участки с низким сопротивлением (полюса) и высоким сопротивлением (воздушные зазоры/выемки)
Обратите внимание на участки с низким сопротивлением (полюса) и высоким сопротивлением (воздушные зазоры/выемки)Изображение предоставлено: http://www.faculty.umassd.edu/xtras/catls/resources/binarydoc/3624.ppt
Импульсные реактивные двигатели
Импульсные реактивные двигатели относятся к типу шаговых двигателей, но они уникальны тем, что имеют перевернутую обмотку, где обмотки возбуждения находятся в статоре, а не в роторе (см. рис. 2). Ротор представляет собой ферромагнитный сердечник с постоянными полюсами и выемками, на которые действуют электромагнитные полюса статора. Хотя это упрощает физическую конструкцию, это усложняет электрическую настройку, поскольку электронная система управления должна включать и выключать полюса статора, чтобы «приводить» полюса ротора в каждое новое положение, вызывая вращение. Реактивный реактивный двигатель может использовать электронный датчик положения, который вычисляет угол между полюсами ротора и обмотками статора, а также синхронизирующий механизм для синхронизации полюсов статора с частотой вращения. В этих двигателях используются достижения в области полупроводников и микроэлектроники 21 века, и они до сих пор оптимизированы для самых разных применений.
В этих двигателях используются достижения в области полупроводников и микроэлектроники 21 века, и они до сих пор оптимизированы для самых разных применений.
Рис. 2: Типовая конструкция вентильного реактивного двигателя. Обратите внимание на неравное соотношение полюсов ротора и статора и катушки, окружающие выступающие полюса статора.
Изображение предоставлено: https://en.wikipedia.org
Применение и критерии выбора
В зависимости от типа реактивного двигателя их применение может различаться; тем не менее, эти двигатели нашли несколько общих применений, которые отличают их от других электродвигателей, и они быстро опережают своих старых собратьев.
Их первым большим преимуществом является простая конструкция — в них не используются контактные кольца, обмотки возбуждения ротора, постоянные магниты, коммутаторы или щетки. Эта простота повышает их эффективность, надежность, производственные затраты, затраты на техническое обслуживание и делает их элегантным вариантом для дизайнеров.
Они обеспечивают очень высокую удельную мощность при небольшом размере; Фактически, реактивные двигатели могут обеспечить пусковой момент в 2-4 раза больший, чем у традиционных асинхронных машин того же размера, что позволяет им быть на 1-2 рамы меньше при той же выходной мощности. Их можно использовать в ситуациях, требующих от 0 до сотен тысяч оборотов в минуту, при условии, что они ограничены только входным током и их подшипниками.
Эти преимущества являются палкой о двух концах, поскольку простая конструкция сочетается со сложной электрической схемой и системами управления. Реактивные двигатели по своей природе привязаны к своей электронике, поэтому эти схемы необходимо покупать вместе с этими двигателями и устанавливать, что может увеличить затраты. Их отношение тока к крутящему моменту чрезвычайно нелинейно и должно решаться с помощью конструкции их системы управления. Переключение явно выраженных полюсов в вентильных реактивных двигателях должно быть точным, иначе двигатель не будет работать.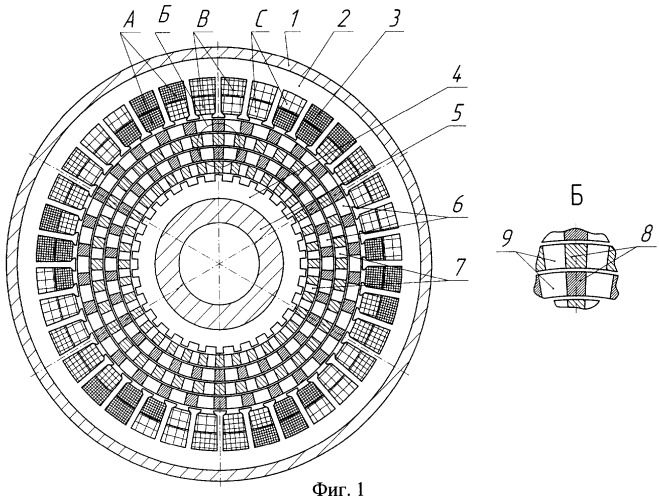 Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
В настоящее время эти двигатели наиболее эффективны на высоких скоростях и нашли широкое применение в стиральных машинах, аналоговых электросчетчиках, приводах управляющих стержней для ядерных реакторов, двигателях с жесткими дисками, электромобилях, приводах стеклоочистителей, записывающем оборудовании и многом другом. более. Они все еще оптимизируются сегодня и могут однажды заменить асинхронный двигатель в качестве отраслевого стандарта благодаря своим благоприятным характеристикам.
Резюме
В этой статье представлено понимание того, что такое реактивные двигатели и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.