
4.6.1.1. Размерность силы
,
1 ньютон (1Н) — это сила, которая массе 1 кг сообщает ускорение 1 м/с.
4.7. Третий закон Ньютона
Силы, с которыми взаимодействуют два тела, равны по модулю и противоположны по направлению. Пример — взаимодействие двух электрических зарядов:
Из третьего закона Ньютона следует, что для каждой силы можно указать тело, являющееся причиной этой силы. Если же указать такое тело — причину возникшей силы — не удается, то тогда причина «силы» — неинерциальность системы отсчета. Напомним, что законы Ньютона справедливы только в инерциальных системах отсчета.
5. Законы сохранения
5.1. Механическая система — это совокупность тел, выделенных нами для рассмотрения 5.1.1. Внутренние и внешние силы
Внутренние
силы — силы, с которыми взаимодействуют
тела системы между собой. Внешние силы действуют со стороны тел, не входящих в систему. |

5.1.2. Замкнутая система Замкнутая система — это система, на которую внешние силы не действуют.
5.1.3. Импульс системы материальных точек — это векторная сумма импульсов всех материальных точек, входящих в систему
, (см. 4.5).
5.2. Закон сохранения импульса
Импульс замкнутой системы сохраняется, т.е. не изменяется со временем.
На рисунке изображена замкнутая система, состоящая из трех тел.
По II закону Ньютона (4.6), примененному к каждому телу рассматриваемой замкнутой системы, имеем:
Сложим
эти уравнения. Справа, по III закону
Ньютона (4.7),
получим ноль. Слева — производную по
времени от полного импульса системы (5.1.3).
Производная — ноль, значит, сама величина — константа.
если нет внешних сил (система замкнута).
рх = const, если Fx = 0, рy = const, если Fy = 0, рz = const, если Fz = 0. |
| |
Если система не замкнута, но внешние силы не действуют на неЈ вдоль каких-либо осей, то соответствующие компоненты импульса сохраняются, например:
рх = const, если Fx= 0, рy≠ const, если Fy |
| |
5. 3.1.
Работа постоянной силы
3.1.
Работа постоянной силы
5.3.2. Элементарная работа
5.3.3.Работа переменной силы
5.3.4. Единица измерения работы
[A]=[F].[s]= H.м = джоуль, Дж
5.4. Мощность P — это скорость совершения работы, т.е.
Используя (5.3.2) и (3.8),
Здесь v — скорость материальной точки, к которой приложена сила .
5.4.1. Единица мощности
5.5. Кинетическая энергия
Применим II закон Ньютона для материальной точки m, движущейся под действием результирующей силы : |
Помножим скалярно: слева на — справа на
.
Используя (5.3.2) справа и преобразуя левую часть,
получим
.
Половина произведения массы частицы на квадрат ее скорости названа ее кинетической энергией
Таким образом элементарная работа, совершаемая над телом, равна элементарному приращению его кинетической энергии. При интегрировании вдоль траектории частицы, от точки 1 до точки 2, мы получим:
Работа результирующей силы идет на приращение кинетической энергии материальной точки.
5.6. Консервативные и неконсервативные силы Консервативные (conservativus — охранительный) — такие силы, РАБОТА которых не зависит от траектории, а определяются только начальным и конечным положением материальной точки. Силы, не обладающие только что названным свойством, называют

Физическая размерность | это… Что такое Физическая размерность?
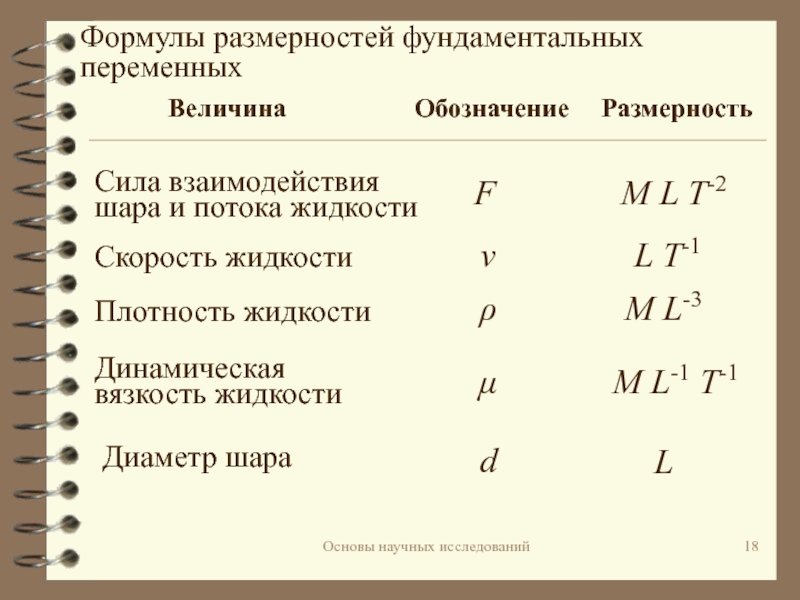
В физике разме́рность физической величины – выражение в форме степенного одночлена, составленного из произведений символов основных физических величин в различных степенях и отражающее связь данной физической величины с физическими величинами, принятыми в данной системе величин за основные и с коэффициентом пропорциональности, равным единице. Такое определение приведено в ГОСТ 16263-70 (ГСИ. Метрология. Термины и определения.), который действует и в настоящее время.
В БСЭ имеется ещё одно определение размерности: Размерность физической величины — выражение, показывающее, во сколько раз изменится единица физической величины при изменении единиц величин, принятых в данной системе за основные. Это определение не соответствует стандарту, кроме того, размерность физической величины и единица измерений физической величины синонимами не являются.
Термин размерность может относиться также к единице измерения физической величины.
Например, размерность скорости — расстояние, делённое на время (L/T), а размерность силы — масса, умноженная на расстояние и делённая на время в квадрате (ML/T2). В механике размерность любой величины может быть выражена через расстояние (которое физики часто называют «длиной»), массу и время. Электрические и магнитные величины также могут быть выражены через эти три размерности с использованием, например, закона Кулона. Однако, при использовании СИ иногда бывает удобнее ввести размерность такой основной физической величины, как электрический ток (
Некоторые из физических величин безразмерны в любой системе единиц, например, постоянная тонкой структуры в квантовой физике или числа Маха, Рейнольдса, Струхаля и др. в механике сред.
в механике сред.
В СИ определены семь единиц основных физических величин, размерности которых считаются независимыми друг от друга. Поскольку система физических величин принципиально отличается от системы единиц, то в некоторых системах физических величин возможен иной перечень основных физических величин, чем в СИ.
Проверка размерности
В формулах, имеющих физический смысл, только величины, имеющие одинаковую размерность, могут складываться, вычитаться или сравниваться. Например, сложение массы какого-либо предмета с длиной другого предмета не имеет смысла. Также невозможно сказать, что больше: 1 килограмм или 3 секунды. Из этого правила, в частности, следует, что левые и правые части уравнений должны иметь одинаковую размерность.
Кроме того, аргументы экспоненциальных, логарифмических и тригонометрических функций должны быть безразмерными величинами.
Эти правила используются для проверки правильности физических формул. Если в полученном уравнении какое-то из них нарушается, то ясно, что в вычислениях была допущена ошибка.
Анализ размерности
Полная статья: Анализ размерности
Анализ размерности — метод, используемый физиками для построения обоснованных гипотез о взаимосвязи различных размерных параметров сложной физической системы. Иногда анализ размерности можно использовать для получения готовых формул (с точностью до безразмерной константы). Суть метода заключается в том, что из параметров, характеризующих систему, составляется выражение, имеющее нужную размерность.
При анализе размерностей формул размерность левой части уравнения должна быть равна размерности правой части уравнения. Отсутствие такого равенства говорит о неверности формулы. Однако наличие такого равенства не даёт стопроцентной гарантии верности формулы.
См. также
- Физическая величина
- Именованные числа
Force Dimension — Тактильные устройства
omega.3
Семейство тактильных устройств omega.x сочетает в себе производительность и дизайн в одном из самых совершенных и модульных тактильных интерфейсов, когда-либо созданных.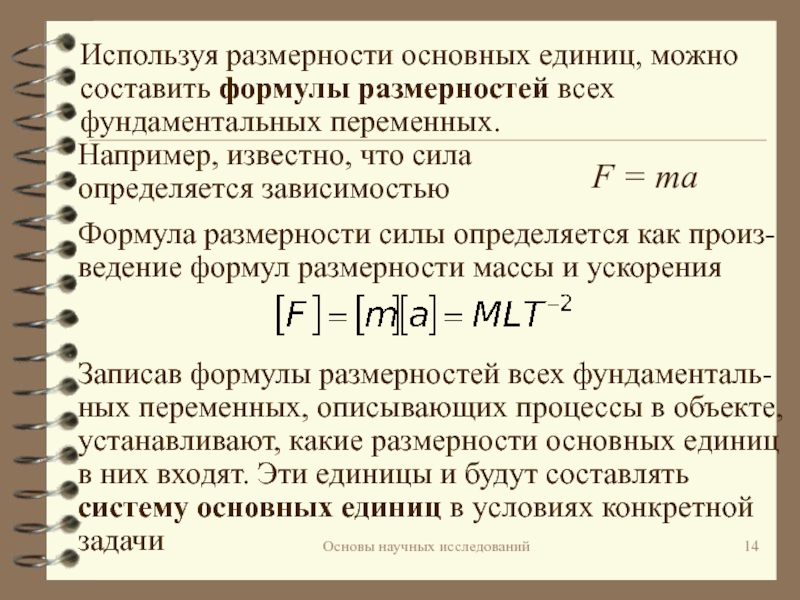 Устройство может быть отклонено в трех версиях, обеспечивающих возможности перемещения, вращения и захвата.
Устройство может быть отклонено в трех версиях, обеспечивающих возможности перемещения, вращения и захвата.
Модель omega.3 с тонко отполированными кинематическими звеньями и рамой из анодированного алюминия демонстрирует непревзойденную надежность, простоту и стиль. Его тонко текстурированный сферический рабочий орган обеспечивает универсальный интерфейс как для левшей, так и для правшей. Этот очень эргономичный и отличительный дизайн делает omega.3 Устройство выбора при выполнении ловких роботизированных задач телеманипуляции или для инстинктивного взаимодействия со сложными виртуальными средами, требующими удобных интерфейсов с оптимальным удобством использования.
Спецификация omega.3
omega.6
Тактильное устройство omega.6 оснащено конечным эффектором в форме ручки с широким диапазоном движений запястья. Основанный на базе omega.x , его конструкция обеспечивает идеальное разделение поступательных и вращательных движений.
Haptic SDK обеспечивает полный доступ к ориентации запястья либо в виде значений угла сустава, либо в виде матрицы вращения, выраженной в декартовом пространстве. Положение рабочего органа устройства указано в декартовых координатах.
Сочетание полной компенсации силы тяжести и калибровки без дрейфа способствует большему удобству пользователя и точности прибора. omega.6 поставляется как в левосторонней, так и в правосторонней конфигурации и использует все возможности обратной связи поступательного усилия омега.3 .
omega.6 спецификация
omega.7
Благодаря уникальному активному удлинителю для захвата, omega.7 является самым универсальным из доступных тактильных устройств. Его рабочий орган охватывает естественный диапазон движений руки человека и совместим с конструкцией двуручной консоли дистанционного управления.
Сочетание полной компенсации силы тяжести и калибровки без дрейфа способствует большему удобству и точности для пользователя. Активный захват может создавать усилие захвата до 8 ньютонов в обоих направлениях.
Активный захват может создавать усилие захвата до 8 ньютонов в обоих направлениях.
omega.7 выпускается как в левосторонней, так и в правосторонней конфигурации и использует все возможности обратной связи поступательного усилия omega.3 .
omega.7 спецификация
- omega.3
- omega.6
- omega.7
| рабочее пространство 9 0006 | перемещение | ∅ 160 x 110 мм | сил | перемещение | 12,0 N | разрешение | перевод | < 0,01 мм | интерфейс | стандарт скорость | USB 2.0 до 4 кГц | 900 61 питание универсальный | 100–240 В | платформы | Microsoft Linux Apple Blackberry WindRiver | Windows все дистрибутивы macOS QNX VxWorks | программное обеспечение | SDK Haptics SDK Robotics CHAI3D | эргономика | устройство можно использовать как левой, так и правой рукой | конструкция | дельта- на основе параллельной кинематики активная гравитационная компенсация | калибровка | автоматическая бездрейфовая | ввод данных пользователем | 1 кнопка пользователя | безопасность | контроль скорости электромагнитное демпфирование |
| рабочее пространство | перемещение вращение | ∅ 160 x 110 мм 240 x 140 x 320 град | силы | поступательное движение вращение | 12,0 Н без срабатывания | разрешение | перемещение вращение | < 0,01 мм 0,09 град | интерфейс | стандарт скорость | USB 2.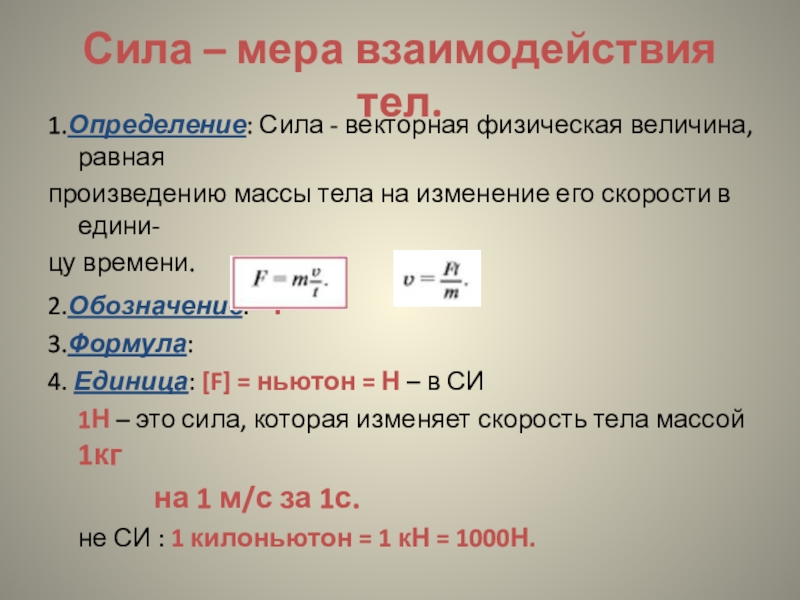 0 0 до 4 кГц | мощность | универсальный | 100 В — 240 В | платформы | Microsoft Linux Apple Blackberry 9 0090 WindRiver | Windows все дистрибутивы macOS QNX VxWorks | программное обеспечение | SDK Haptics SDK Robotics CHAI3D | Эргономика | доступны в лево- и правосторонней конфигурации | Структура | дельта-параллельная кинематика вращательные движения с ручным центрированием разделение между поступательным и вращательным движениями активная компенсация силы тяжести 0005 ввод пользователя | 1 кнопка пользователя | безопасность | контроль скорости электромагнитное демпфирование |
| рабочее пространство | перемещение вращение захват | ∅ 160 x 110 мм 240 x 140 x 320 градусов 25 мм | сил | перемещение вращение захват | 12,0 Н не задействовано 8,0 Н | разрешение | перемещение вращение захват | < 0,01 мм 0,09 град 0,006 мм | интерфейс | стандарт 9009 0 скорость | USB 2. 0 0 до 4 кГц | мощность | универсальный | 100 В — 240 В | платформы | Microsoft Linux Apple Blackberry 9 0090 WindRiver | Windows все дистрибутивы macOS QNX VxWorks | программное обеспечение | SDK Haptics SDK Robotics CHAI3D | Эргономика | доступны в лево- и правосторонней конфигурации | Структура | дельта-параллельная кинематика вращательные движения с ручным центрированием разделение между поступательным и вращательным движениями активная компенсация силы тяжести 0005 ввод пользователя | 1 имитация кнопки с помощью силового захвата | Безопасность | Контроль скорости Электромагнитное демпфирование |
Фотогалерея
Force Dimension — Компания | О нас
Справочная информация
Компания Force Dimension, основанная в 2001 году как дочерняя компания Швейцарского федерального технологического института в Лозанне (EPFL), является ведущим новатором в области высокоточных тактильных технологий. Компания завоевала международную репутацию за разработку и производство уникального дизайна и усовершенствованных интерфейсов с силовой обратной связью для робототехники, промышленности, аэрокосмической, медицинской и бытовой электроники.
Компания завоевала международную репутацию за разработку и производство уникального дизайна и усовершенствованных интерфейсов с силовой обратной связью для робототехники, промышленности, аэрокосмической, медицинской и бытовой электроники.
Компания Force Dimension, занимающаяся разработкой продуктов, также лицензирует и разрабатывает индивидуальные роботизированные и VR-решения для широкого спектра областей применения. На протяжении многих лет Force Dimension также тесно сотрудничает с академическими учреждениями, такими как EPFL и Стэнфордский университет, а также со школами дизайна, включая ECAL и Швейцарский центр дизайна.
Хронология
Ноябрь 2021
Международная космическая станция (МКС)
Астронавты Томас Песке (ЕКА) и Меган Макартур (НАСА) используют sigma.7 на борту МКС в рамках эксперимента PILOTE, воссоздающего чувство давления и коснитесь при дистанционном управлении манипулятором. Sigma.7 празднует два года пребывания в космосе, совершив более 10 000 оборотов вокруг Земли и преодолев расстояние в 420 миллионов километров.
ноябрь 2021 г.
август 2020 г.
Consumer Entertainment
Force Dimension запускает технологию тактильного управления и рендеринга высокой четкости для развлечений. Эта новая технология позволяет студиям разработки игр легко включать в свои приложения сверхреалистичные возможности силовой обратной связи.
ноябрь 2019 г.
Международная космическая станция (МКС)
В сотрудничестве с Европейским космическим агентством (ЕКА) Force Dimension сертифицирует тактильное устройство sigma.7 для использования в космосе и запускает его на Международную космическую станцию (МКС). Впервые астронавт ЕКА Лука Пармитано успешно дистанционно управляет роботом-манипулятором, расположенным на Земле, с трехмерным интерфейсом силовой обратной связи.
ноябрь 2019 г.
июнь 2018 г.
Искусство часового дела
В сотрудничестве со швейцарским производителем роскошных часов Audemars Piguet компания Force Dimension представляет ChronoSim, первый тактильный симулятор для дизайнеров часов.
Сентябрь 2017 г.
Лямбда-тактильное устройство
«Титан Медикал» представляет систему SPORT, в которую интегрированы новейшие лямбда-тактильные устройства Force Dimension.
Сентябрь 2017 г.
Апрель 2016 г.
OceanOne
Force Dimension поставляет тактильные устройства для OceanOne, подводного робота, разработанного Стэнфордским университетом и Google и оснащенного искусственным интеллектом и системами тактильной обратной связи. Система дает археологам беспрецедентную возможность исследовать глубины океанов с высокой точностью.
ноябрь 2014 г.
Hansen Medical
Медицинские тактильные устройства Force Dimension насчитывают в общей сложности более 15 000 клинических случаев использования хирургами устройств для хирургических вмешательств.
ноябрь 2014 г.
март 2013 г.
Тактильные и промышленные роботы
Компания Vulcan Engineering представляет VTS, большого промышленного робота, который управляется вручную с помощью тактильного устройства омега. 3 для операций отрезания и шлифования.
3 для операций отрезания и шлифования.
Июль 2015
Medical Robotics
Компания Medrobotics получила разрешение CE и FDA на роботизированную систему Flex® для ЛОР-приложений. Хирургическая система включает в себя тактильное устройство omega.3 Force Dimension.
Июль 2015 г.
Июнь 2012 г.
Медицинское моделирование
Force Dimension разрабатывает и производит первый ScanTrainer TAS для Medaphor.
Март 2012 г.
Тактильная консоль Sigma.7
Force Dimension выпускает консоль sigma.7, двуручный интерфейс, предназначенный для управления робототехникой.
Март 2012 г.
Ноябрь 2011 г.
Медицинская робототехника
Компания Magnetecs включает тактильное устройство omega.3 в свою роботизированную систему управления наведением катетера и визуализации (CGCI) для минимально инвазивной хирургии.
Январь 2013 г.
NeuroArm
IMRIS и Университет Калгари проводят первые клинические испытания на людях NeuroArm, совместимого с МРТ робота для операций на головном мозге, управляемого двумя тактильными устройствами омега. 7.
7.
Январь 2013 г.
Январь 2009
Тактильное устройство Delta.3
Force Dimension выпускает обновленную версию тактильных устройств delta.3.
Август 2008 г.
Hansen Medical
Роботизированная система Hansen Medical Sensei®, включающая в себя медицинское тактильное устройство omega.3 Force Dimension, получила разрешение FDA и маркировку CE. Отгружены первые системы.
Август 2008 г.
Сентябрь 2007 г.
Первые полеты в условиях микрогравитации
В сотрудничестве с SRI International и NASA компания Force Dimension проводит первые экспериментальные испытания тактильных устройств Omega.7 в условиях микрогравитации на борту C9самолет.
Июнь 2007 г.
Novint Falcon
Force Dimension передает лицензию на свою тактильную технологию компании Novint Technologies. Запуск первого в мире потребительского тактильного 3D-устройства, разработанного для рынка развлечений.
Июнь 2007 г.
Март 2007 г.
Тактильное устройство Omega.7
Force Dimension представляет тактильное устройство omega.7, первое коммерческое тактильное устройство с 7 степенями свободы и технологией обратной связи по силе.
Май 2010 г.
Тактильное устройство Sigma.7
Force Dimension представляет тактильное устройство sigma.7, первое коммерческое тактильное устройство, сочетающее в себе высокие усилия, крутящие моменты и возможности захвата. Устройство интегрировано в хирургическую роботизированную систему MIRO, разработанную Немецким аэрокосмическим центром (DLR).
Май 2010 г.
Январь 2005 г.
Сеть продаж
Force Dimension расширяет свою торговую деятельность в Японии, Корее и Китае.
Август 2006 г.
Сертификация FDA
Force Dimension выпускает свой первый тактильный интерфейс, сертифицированный с медицинской точки зрения. Система интегрирована в роботизированную систему Sensei, разработанную и выпущенную на рынок компанией Hansen Medical.