
Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
Главная » Полезные статьи » Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
30.07.2020
Сравнение синхронных и асинхронных двигателей: различия в строении и возможностях
Асинхронные и синхронные электродвигатели имеют принципиальные отличия, которые во многом определяют сферу эксплуатации. Разница в конструкции позволяет в отдельных случаях более эффективно выполнять поставленные задачи на промышленных объектах. Наибольшее распространение получили асинхронные электродвигатели, но иногда выгоднее использовать синхронные аналоги.
Особенности строения и работы синхронных двигателей
Внешне оба вида электрических двигателей очень похожи, но есть существенные различия в строении роторов. Эти элементы в случае с асинхронными устройствами не питаются электрическим током. При работе вращающееся магнитное поле образуется за счет МДС обмоток статора.
При работе вращающееся магнитное поле образуется за счет МДС обмоток статора.
Ротор синхронных электродвигателей обладает обмоткой с автономным питанием. Статоры имеют идентичную конструкцию. Основная задача этих элементов заключается в формировании вращающегося магнитного поля во время работы.
Важно знать, что обороты синхронного двигателя совпадают по частоте магнитного поля, которое создает статор. Совершенно другая ситуация в случае с асинхронными электродвигателями. При работе под нагрузкой есть отставание от вращения магнитного поля непосредственно на величину скольжения. По этой причине выгоднее делать выбор в пользу синхронного двигателя, если требуется обеспечивать постоянные обороты при разных нагрузках.
Особенности строения и работы асинхронного двигателя
Сфера эксплуатации асинхронных электродвигателей в целом очень широка. Их активно применяют в различном оборудовании, где отмечается относительно равномерная нагрузка, а уменьшение оборотов не так существенно влияет на рабочий процесс. Такими двигателями оснащают станки, насосы, транспортеры и другие электрические установки.
Такими двигателями оснащают станки, насосы, транспортеры и другие электрические установки.
Однако есть компрессоры и насосы, которые требуют поддержания определенной частоты оборотов при изменяющейся нагрузке, на них устанавливают синхронные двигатели.
Сравнение и преимущества асинхронных электродвигателей
Синхронные электродвигатели устанавливают в электроприводах, которые работают без регулировки частоты вращения. Перед асинхронными аналогами они имеют преимущества, которые касаются следующих моментов:
- КПД несколько выше;
- возможность работы при низкой частоте вращения, благодаря чему удается убрать промежуточные передачи между оборудованием и двигателем;
- отсутствие влияния нагрузки, передаваемой на вал двигателя, на частоту вращений;
- возможность применения в качестве компенсирующих приспособлений реактивной мощности.
При необходимости синхронные двигатели могут выступать в роли генераторов или потребителей реактивной мощности. Основные параметры будут зависеть от величины электрического тока непосредственно в обмотке.
Основные параметры будут зависеть от величины электрического тока непосредственно в обмотке.
Отличие синхронного электродвигателя от асинхронного » Стройремблог
Благодаря простоте в эксплуатации, экономичности и надежности в различных отраслях промышленности используются синхронные и асинхронные электродвигатели. Силовые установки отличаются по мощности. Чтобы понять, какая разница между устройствами, следует ознакомиться с принципом действия моторов.
На сайте интернет-магазина https://promelektro-kharkov.com.ua/ в Украине можно выгодно купить общепромышленные АИР переменного тока от отечественного производителя. Различие электромоторов в частоте вращения и обмотке. На сайте можно подобрать вариант с показателями 1000, 1500, 3000, об/мин. Для промышленного оборудования на сайте выгодно купить асинхронные электродвигатели с короткозамкнутым ротором. Вежливые консультанты подскажут в чём разница и чем отличаются силовые установки. Товар сопровождается гарантией и соответствует всем техническим стандартам.
В чем отличие асинхронных от синхронных электродвигателей
Главным отличием асинхронного электродвигателя от синхронного является неравнозначная частота вращения магнитного поля и ротора. Силовой агрегат используется не только для оборудования в промышленности, но и в быту. Асинхронный механизм применяется в обустройстве подъемных конструкций, различных станков и конвейеров.
Во время работы синхронного двигателя частота вращения полей одинакова. Поддерживать синхронизацию позволяет дополнительный источник постоянного питания. Эксплуатация механизма эффективна только при наличии частотного преобразователя. Синхронные установки незаменимы для оборудования, которое требует повышенных мощностей. Его устанавливают на промышленных предприятиях, где часто возникают перегрузки.
Принцип действия и его различие между АИР
При пуске асинхронного электродвигателя магнитное поле статора стыкуется с контуром ротора и продуцирует движение. Появляется переменный ток, который создается магнитными полями. При совпадении частот вращения процессы прекращаются и крутящий момент приравнивается к нулю. Контур ротора АИР возбуждается полем статора. Изменить частоту можно, воспользовавшись преобразователем.
При совпадении частот вращения процессы прекращаются и крутящий момент приравнивается к нулю. Контур ротора АИР возбуждается полем статора. Изменить частоту можно, воспользовавшись преобразователем.
При подключении синхронного электродвигателя постоянный ток двигается к обмотке возбуждения, а ротор остается неподвижным. За период смены тока направление электромагнитного поля меняется дважды. Когда средний момент равняется нулю, под механическим влиянием ротор набирает скорость параметров, близких к вращению поля в зазоре. Механизм начинает работать в синхронном режиме.
Как выгодно купить в Украине общепромышленные электродвигатели
Чтобы выгодно купить в Украине общепромышленный электродвигатель стоит посетить сайт изготовителя «Промэлектро-Харьков», где можно подобрать качественные установки в соответствии с требованиями промышленного оборудования. Благодаря строгому контролю на всех этапах производства механизмов удаётся добиться отменных характеристик электромоторов. Они будут выполнять свою задачу без перебоев много лет подряд, а услуга послегарантийного ремонта позволит продлить срок эксплуатации агрегатов.
Они будут выполнять свою задачу без перебоев много лет подряд, а услуга послегарантийного ремонта позволит продлить срок эксплуатации агрегатов.
В чем разница между асинхронными и синхронными двигателями?
Загрузите эту статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики двигателя. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации мотора. Среди классических примеров этого явления — асинхронные и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными. Асинхронный характер работы асинхронного двигателя возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью вращения ротора. Более конкретное объяснение того, как возникает это скольжение, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), называемый беличьей клеткой. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов проводящими кольцами, которые электрически закорачивают стержни друг с другом. Сплошной сердечник ротора состоит из пакетов пластин из электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым кратным пазам статора, чтобы предотвратить магнитную блокировку зубьев ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, роторы которых состоят из обмоток, а не из беличьей клетки. Суть этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средства снижения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного соединения каждой обмотки ротора с резистором. Обмотки получают ток через какое-то контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически он становится таким же, как ротор с короткозамкнутым ротором.
Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически он становится таким же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к сети переменного тока. Приложение напряжения к статору вызывает протекание тока в обмотках статора. Протекание тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила возникает, когда петля провода перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда отстает от поля статора на некоторую величину, поэтому оно вращается со скоростью, несколько меньшей, чем скорость статора. Разница между ними называется скольжением.
Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда отстает от поля статора на некоторую величину, поэтому оно вращается со скоростью, несколько меньшей, чем скорость статора. Разница между ними называется скольжением.
Величина скольжения может варьироваться. Это зависит в основном от нагрузки, которую приводит двигатель, но также зависит от сопротивления цепи ротора и силы поля, которое индуцирует поток статора.
Несколько простых уравнений проясняют основные взаимосвязи.
Когда переменный ток изначально подается на статор, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и в статоре. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r , капли. Если f — частота напряжения статора, то скольжение, с, связывает два через f r = с f . Здесь s выражается в виде десятичной дроби.
Когда ротор стоит на месте, ротор и статор эффективно образуют трансформатор. Таким образом, напряжение E , индуцируемое в роторе, определяется уравнением трансформатора0022 м
Таким образом, напряжение E , индуцируемое в роторе, определяется уравнением трансформатора0022 м
где N = количество проводников под одним полюсом статора (обычно небольшое для двигателя с короткозамкнутым ротором) и Ñ„ м = максимальный магнитный поток, Webers. Thus, the voltage E r induced while the rotor spins depends on the slip:
E r = 4.44 s f N Ñ„ m = s E
Описание синхронных двигателей Синхронный двигатель имеет специальную конструкцию ротора, которая позволяет ему вращаться с той же скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением. Однако недавние достижения в области схем управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, воздуходувки и ведущие мосты во внедорожных транспортных средствах.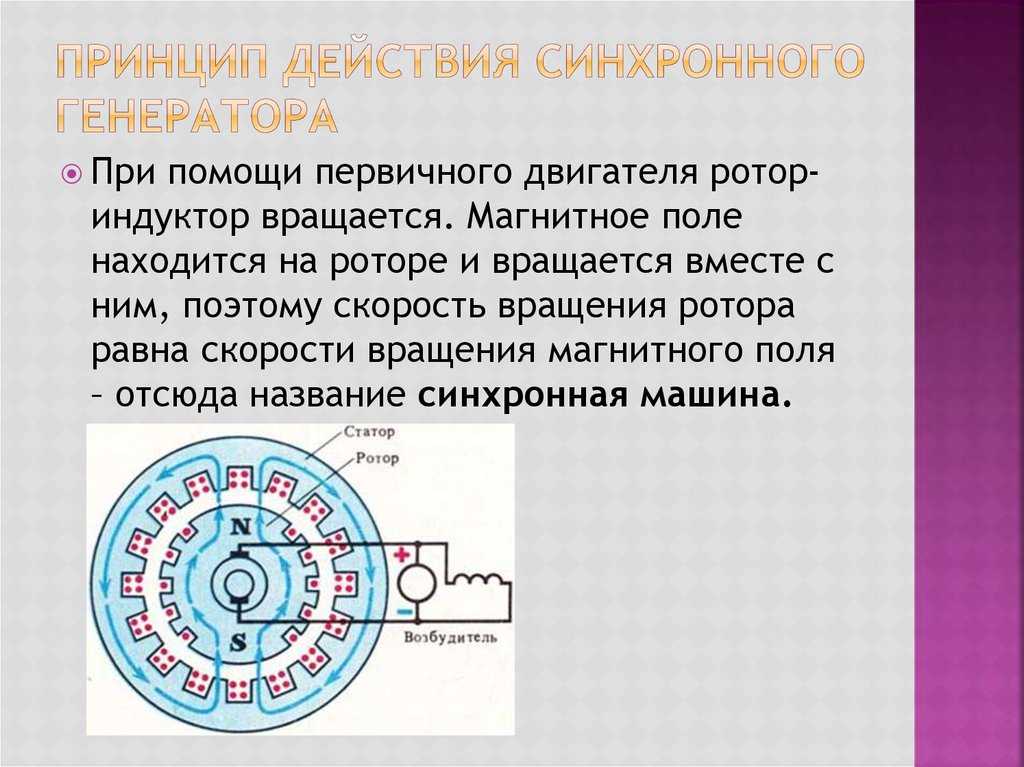
В основном существует два типа синхронных двигателей:
• С самовозбуждением — Принципы аналогичны асинхронным двигателям, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Синхронный двигатель с самовозбуждением , также называемый вентильным реактивным двигателем, содержит стальной литой ротор с прорезями или зубьями, получившими название явно выраженных полюсов. Именно выемки позволяют ротору зафиксироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки/фазы статора аналогично шаговому двигателю. Синхронный двигатель с прямым возбуждением может называться по-разному. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянными магнитами. В этой конструкции используется ротор с постоянными магнитами. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Постоянные магниты являются выступающими полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотках статора в нужное время с помощью полупроводниковых переключателей, сводя к минимуму пульсации крутящего момента. Принцип работы всех этих типов синхронных двигателей в основном одинаков. Энергия подается на катушки, намотанные на зубья статора, которые создают значительный магнитный поток, пересекающий воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубцом статора, крутящий момент не создается. Если зубец ротора находится под некоторым углом к зубу статора, по крайней мере часть потока пересекает зазор под углом, не перпендикулярным поверхностям зубьев. Результатом является крутящий момент на роторе. Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Еще один тип синхронного двигателя называется вентильным реактивным двигателем (SR).
Его ротор состоит из стальных пластин с набором зубьев. Зубцы магнитопроницаемы, а окружающие их участки слабопроницаемы в силу прорезанных в них пазов. Таким образом, ротору не нужны обмотки, редкоземельные материалы или магниты.
В отличие от асинхронных двигателей, в роторе отсутствуют стержни ротора и, следовательно, в роторе не протекает ток, создающий крутящий момент. Отсутствие проводника какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях с роторами, несущими проводники. Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем модуляции крутящего момента (посредством тока обмотки). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. Производство крутящего момента не зависит от скорости двигателя. Это отличается от асинхронных двигателей переменного тока, где при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения оборотов двигателя.
Какие существуют типы электродвигателей? Коллекторные, асинхронные и синхронные постоянного тока
Свяжитесь с Valin сегодня для получения дополнительной информации по телефону (855) 737-4716 или заполните нашу онлайн-форму.
The Motion Control Show Я уже говорил о том, что такое электродвигатель, теперь я собираюсь рассказать о нескольких различных типах электродвигателей. В частности, я собираюсь поговорить о коллекторных двигателях постоянного тока, асинхронных и синхронных. Я Кори Фостер из Valin Corporation. Посмотрим, чему мы можем научиться.
В частности, я собираюсь поговорить о коллекторных двигателях постоянного тока, асинхронных и синхронных. Я Кори Фостер из Valin Corporation. Посмотрим, чему мы можем научиться.
Есть много людей, которые знают о некоторых типах электродвигателей гораздо больше, чем я, поэтому я обратился к моему хорошему другу и коллеге Джону Брокоу, чтобы поделиться своим мнением о некоторых из этих типов.
КОРИ: Джон, что вы можете рассказать мне о коллекторном двигателе постоянного тока?
ДЖОН: Это старейший школьный грязный мотор из когда-либо созданных. Эта вещь была вокруг. Посмотрите прямо здесь, на слайдах, изобретенных Фарадеем в 1821 году. Итак, это технология на 200 лет. На самом деле он все еще используется во многих приложениях, потому что он относительно недорог. У него есть несколько известных проблем, о которых все знают. Чаще всего это износ щеток. У вас есть эти керамические угольные щетки, которые пропускают ток к вращающемуся ротору, и износ этих щеток они просто, как и все остальное, они в конечном итоге изнашиваются, и их нужно заменять.
КОРИ: Итак, там, где щеточный двигатель постоянного тока здесь коммутируется обрывом проводов и этих щеток здесь, двигатель переменного тока на самом деле коммутируется синусоидальной частотой переменного тока, поступающего сюда и подаваемого на контакторы. Теперь это показывает, что катушка находится внутри, но на самом деле, обычно катушка представляет собой статор снаружи с ротором внутри, который вращается. Но это хорошо для сравнения. Разница между переменным и постоянным током и как они коммутируются.
Прежде чем я расскажу больше о двигателях переменного тока, давайте поговорим о синхронных и асинхронных двигателях. В асинхронном двигателе переменного тока нет магнитов, поэтому он фактически вращается медленнее, чем синхронная скорость поступающей в него частоты. Я уже говорил о том, как двигатель переменного тока коммутирует входную частоту переменного тока, 60 Гц здесь, в США, но асинхронный двигатель, поскольку у него нет магнитов, фактически будет отставать от этого, и он всегда будет работать до настигнуть.
Для этого мне нужно вернуться к Джону Брокоу. Джон, асинхронные и асинхронные двигатели переменного тока — это одно и то же?
ДЖОН: Все асинхронные двигатели переменного тока являются асинхронными. Но вы можете получить из них синхронные, псевдосинхронные приложения, соединив их с обратной связью и выполняя над ними векторное управление. Именно здесь вы фактически контролируете угол между этими двумя и контролируете частоту скольжения, чтобы она была именно такой, какой вы хотите, чтобы создать характеристики крутящего момента / скорости приложения.
А вот и внутренности асинхронного двигателя переменного тока. Вы можете видеть, что это классический асинхронный двигатель, в котором вы не видите никаких щеток или чего-либо еще. У вас есть ротор в сборе посередине, который привязан к валу, проходящему через него. Единственным изнашиваемым компонентом типичного асинхронного двигателя переменного тока являются подшипники, которые вы можете видеть на концах двигателя. Существует ряд аксессуаров, которые можно добавить к асинхронному двигателю в зависимости от области применения. Один из основных моментов, о котором следует подумать, — это охлаждение. У этого есть вентилятор. Это похоже на полностью закрытый двигатель с вентиляторным охлаждением. Вы также можете иметь невентилируемые двигатели, которые герметичны. У вас может быть открытый двигатель, через который фактически проходит воздух. Вы можете принудительно проветрить эти вещи. Вы можете поставить гидравлические рубашки охлаждения на двигатель. Есть много разных способов охладить мотор. В конце концов, нужно помнить, что электродвигатель представляет собой медную катушку, через которую вы пропускаете электричество.
Вы можете видеть, что это классический асинхронный двигатель, в котором вы не видите никаких щеток или чего-либо еще. У вас есть ротор в сборе посередине, который привязан к валу, проходящему через него. Единственным изнашиваемым компонентом типичного асинхронного двигателя переменного тока являются подшипники, которые вы можете видеть на концах двигателя. Существует ряд аксессуаров, которые можно добавить к асинхронному двигателю в зависимости от области применения. Один из основных моментов, о котором следует подумать, — это охлаждение. У этого есть вентилятор. Это похоже на полностью закрытый двигатель с вентиляторным охлаждением. Вы также можете иметь невентилируемые двигатели, которые герметичны. У вас может быть открытый двигатель, через который фактически проходит воздух. Вы можете принудительно проветрить эти вещи. Вы можете поставить гидравлические рубашки охлаждения на двигатель. Есть много разных способов охладить мотор. В конце концов, нужно помнить, что электродвигатель представляет собой медную катушку, через которую вы пропускаете электричество.
Другими точками износа, которые вы можете увидеть, являются подшипники. Подшипники, как и любые подшипники, как и подшипники в вашей машине, рано или поздно вам придется их заменить, потому что они изнашиваются. Есть некоторые другие аксессуары, прокладки, уплотнения, разные вещи в зависимости от среды, в которой вы на самом деле размещаете свой асинхронный двигатель, и от того, каково приложение.
КОРИ: Давайте поговорим о двигателях переменного тока и частотно-регулируемых приводах, которые их приводят в действие. Что вы думаете о них?
ДЖОН: ЧРП — это здорово. Это действительно зависит от приложения, потому что вы обычно говорите о нескольких разных вещах. Один — что ты хочешь? Как вы хотите запустить двигатель? И есть несколько разных способов сделать это.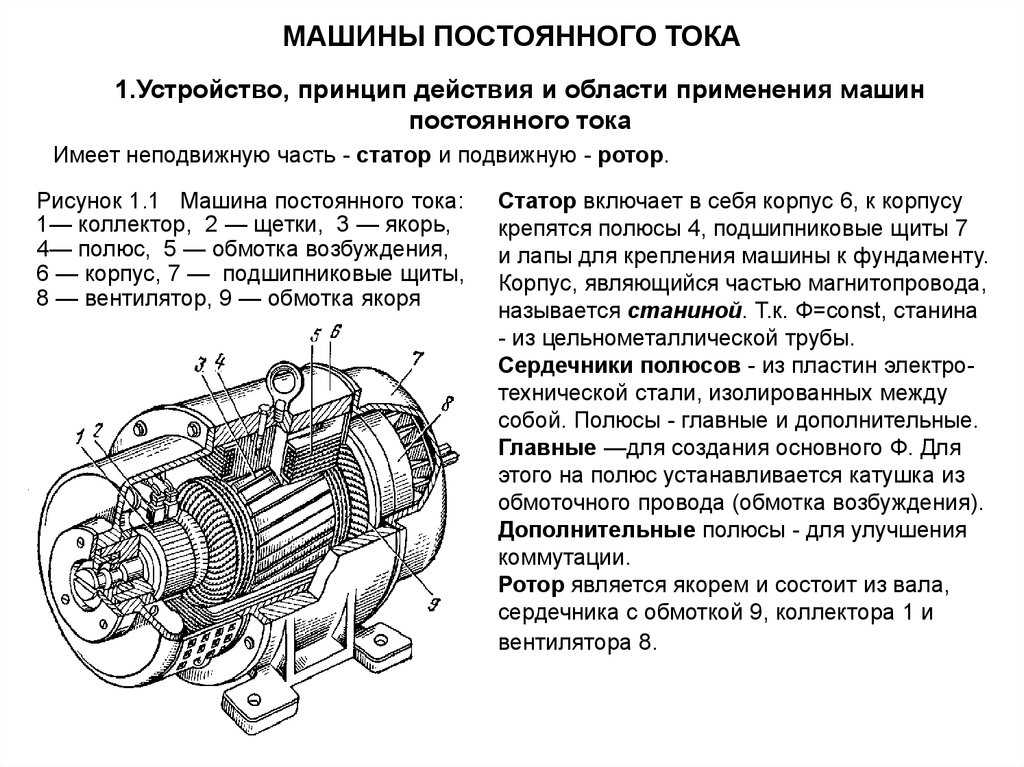
Другой метод — плавный пуск. Это электронные компоненты, которые в основном медленно увеличивают напряжение в течение 5, 10, 15 секунд, чтобы сделать это закрытие более плавным. Это намного проще для двигателя, и гораздо меньше шума возвращается в вашу электрическую сеть. Это старый и грязный способ запуска электродвигателя, который применялся уже пару сотен лет.
Это старый и грязный способ запуска электродвигателя, который применялся уже пару сотен лет.
С 60-х годов у нас есть частотно-регулируемые приводы. С появлением полупроводников мы можем выполнять различные широтно-импульсные модуляции для запуска управления частотой асинхронного двигателя переменного тока. Помните, двигатели следуют за поступающей в них частотой. Таким образом, регулируя частоту, вы можете регулировать скорость двигателя. Это имеет много преимуществ. Применение насоса: вы можете фактически контролировать, сколько воды вы накачиваете, где вы работаете с кривой двигателя насоса. Получает немного больше эффективности. Вы можете оптимизировать приложение. Затем вы также можете медленно увеличивать скорость, чтобы вы не просто замыкали линию, а делали ее более плавной и чистой для энергосистемы. Обратите внимание на некоторые частотно-регулируемые приводы, в которые вам может понадобиться установить фильтр, потому что они создают некоторые гармоники, которые могут вернуться в вашу электросеть, но в целом частотно-регулируемый привод намного чище с электрической точки зрения, способ установки и запуска двигателя.
КОРИ: Чтобы понять, что такое синхронный двигатель, он характеризуется постоянной скоростью вращения, которая не зависит от нагрузки, но связана с частотой сети или током в зависимости от типа привода. Вот откуда взялся термин «синхронный», и это в основном делается с помощью постоянных магнитов, которые там находятся. Если вы посмотрите на конструкцию, она немного отличается от асинхронного двигателя переменного тока. Я хочу, чтобы Джон Брокоу указал нам на кое-что.
ДЖОН: Обратите внимание, что в синхронном двигателе всегда есть пара вещей. У вас всегда будет обратная связь по синхронному двигателю. Вы делаете это, потому что вам нужно знать, где на самом деле находятся магниты, потому что они чередуют север, юг, север, юг вокруг ротора. Как вы можете видеть на диаграмме в правом нижнем углу, вы можете видеть все маленькие магниты, установленные на поверхности, и они на самом деле, если вы на самом деле поместите туда магнит, вы действительно увидите их чередующиеся север, юг, Север, Юг, Север, Юг, когда вы вращаетесь вокруг ротора. Это то, против чего катушки реагируют и могут фактически вращать это, чередуя. Без обратной связи на устройстве вы не будете знать, где вы должны включить или выключить нужную катушку, и вы можете в конечном итоге бороться с самой системой.
Это то, против чего катушки реагируют и могут фактически вращать это, чередуя. Без обратной связи на устройстве вы не будете знать, где вы должны включить или выключить нужную катушку, и вы можете в конечном итоге бороться с самой системой.
КОРИ: Итак, Джон, возникает вопрос: синхронные и серводвигатели — это одно и то же?
ДЖОН: Все серводвигатели переменного тока являются синхронными. Все синхронные двигатели не являются серводвигателями. Есть несколько необычных синхронных двигателей, которые не являются серводвигателями; переключать реактивные двигатели, шаговые двигатели синхронны, потому что они следуют частоте, но они не являются серводвигателями.
КОРИ: Если поставить два типа двигателей рядом, вы увидите, насколько конструкция похожа, но также и чем она отличается. Асинхронные двигатели могут быть огромными. Они могут быть совершенно огромными, размером с небольшую комнату. Синхронные двигатели, магниты становятся слишком дорогими, так что они на самом деле не будут больше большой кошки, самое большее. Но есть некоторые сходства, некоторые отличия.
Но есть некоторые сходства, некоторые отличия.
Теперь Джон действительно хотел убедиться, что я объяснил важность расчета лошадиных сил. Мощность равна крутящему моменту, умноженному на скорость. Мощность может быть в лошадиных силах или может быть в ваттах. Вычисление, которое я люблю использовать, просто по памяти, заключается в том, что лошадиные силы равны крутящему моменту в унциях-дюймах, умноженному на скорость в оборотах в секунду, деленному на 16 800. Теперь это важно, потому что асинхронные двигатели и двигатели переменного тока оцениваются в лошадиных силах, но если у вас есть серводвигатель, у нас есть кривые скорость / крутящий момент, которые часто выглядят так, где у вас есть крутящий момент здесь и скорость здесь. Это в значительной степени одна и та же мощность от начала до конца, но это производство крутящего момента и скорости, поэтому мы часто не говорим о мощности серводвигателя или синхронного двигателя с точки зрения мощности. Мы говорим об этом с точки зрения скорости и крутящего момента.