
формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.

Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
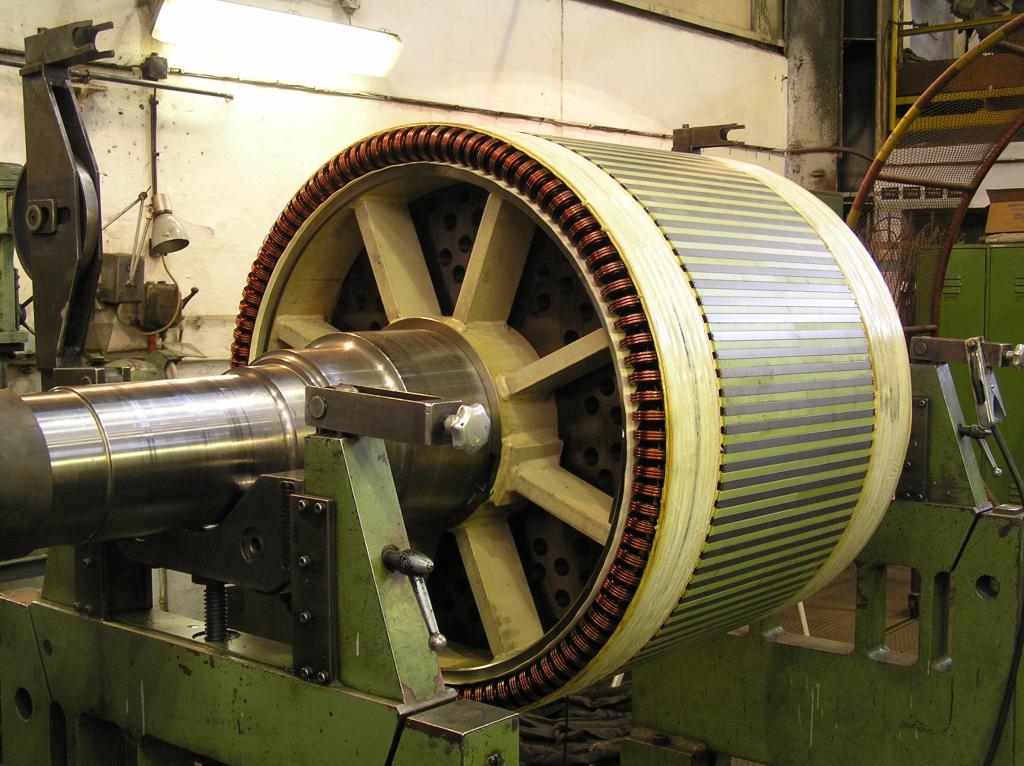
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
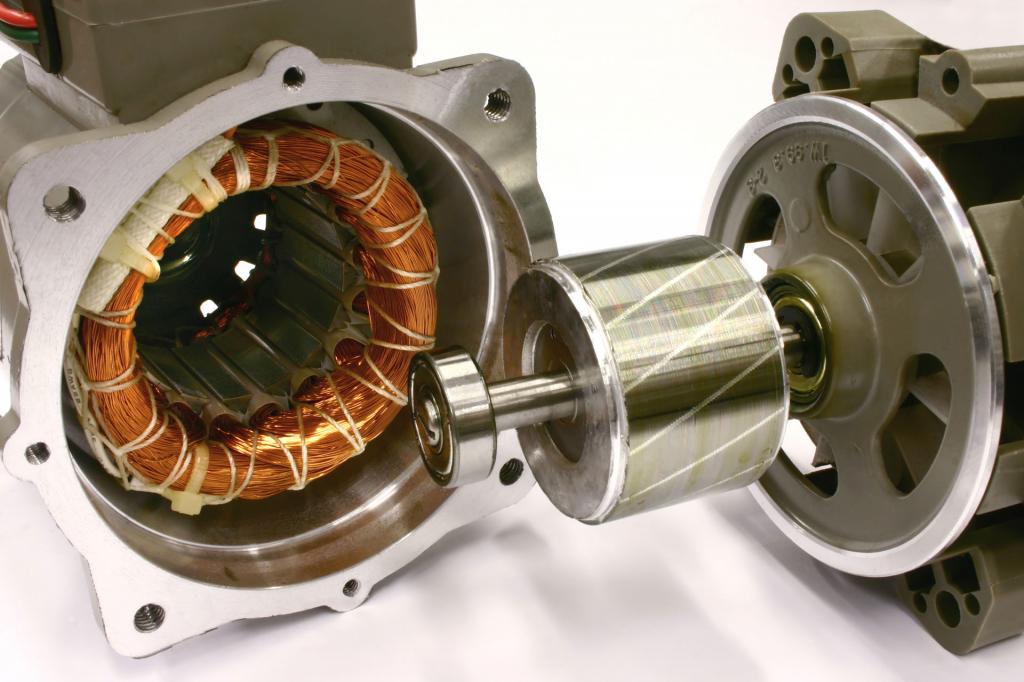
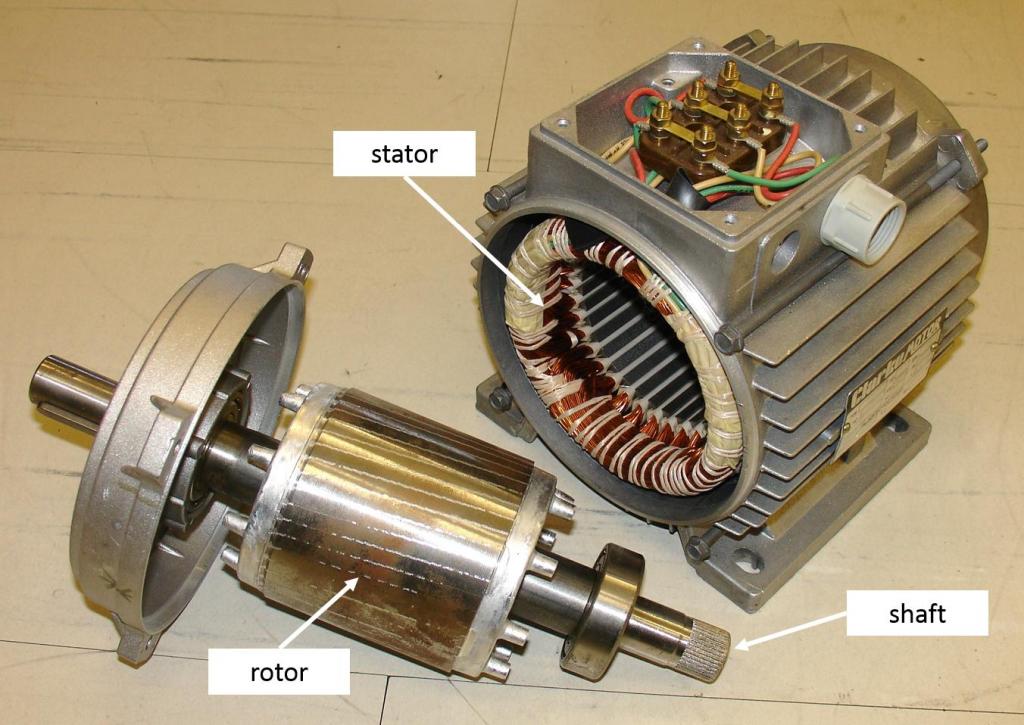
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
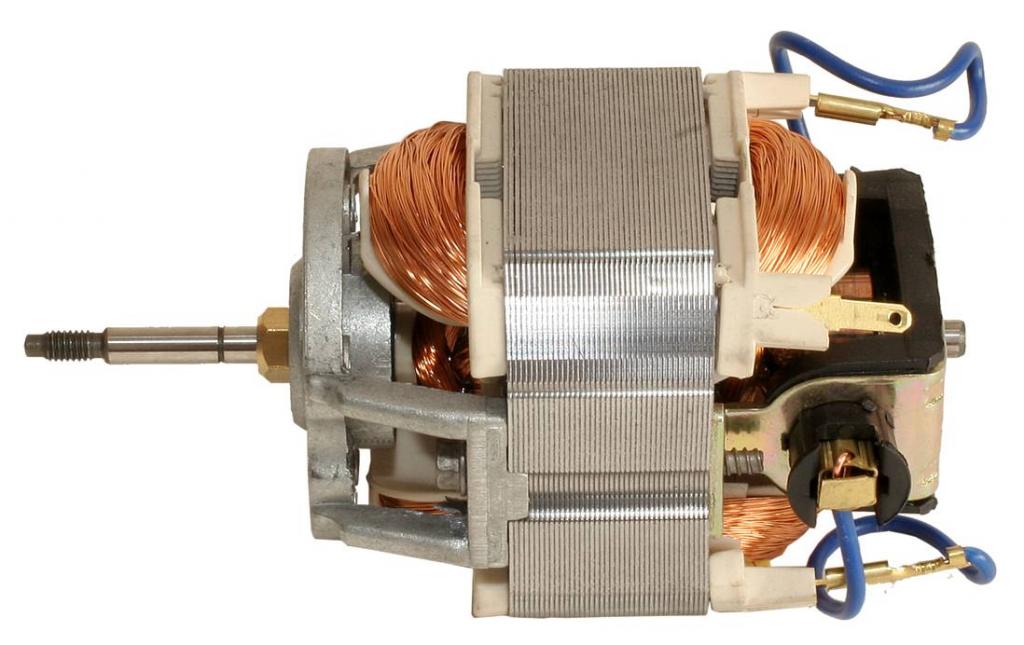
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
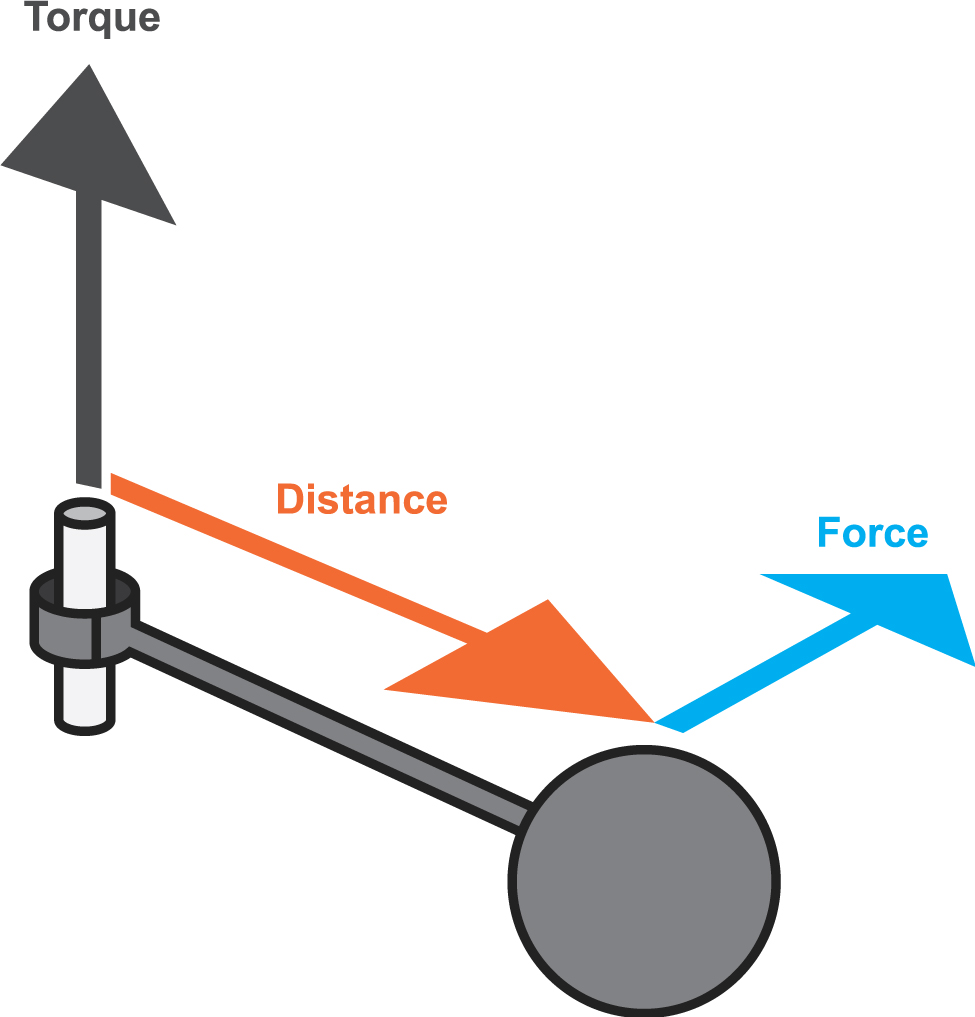
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
P = dA ÷ dt, где:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
eta = P2 ÷ P1, где:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
t = 60 секунд.
Момент инерции
Этот показатель представляет собой скалярную физическую величину, которая отражает меру инертности вращательного движения вокруг собственной оси. При этом масса тела является величиной его инертности при поступательном движении. Основная характеристика параметра выражена распределением масс тела, которая равна сумме произведений квадрата расстояния от оси до базовой точки на массы объекта.В Международной системе единиц измерения он обозначается как кг·м2 и имеет рассчитывается по формуле:
J = ∑ r2 × dm, где
J — момент инерции, кг·м2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны между собой соотношением:
M — J × epsilon, где
epsilon — угловое ускорение, с-2.
Показатель рассчитывается как:
epsilon = d(omega) × dt.
Таким образом, зная массу и радиус ротора, можно рассчитать параметры производительности механизмов. Формула мощности электродвигателя включает в себя все эти характеристики.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Заключение
Электродвигатели находят применение практически во всех областях жизни человека: в быту, в производстве. Для правильного использования привода необходимо знать не только его номинальные характеристики, но и реальные. Это позволит повысить его эффективность и снизить затраты.
Расчет синхронных двигателей с шихтованными полюсами. Расчет параметров и характеристик синхронных двигателей с массивным гладким ротором, страница 11
Ток возбуждения СД можно представить как геометрическую сумму двух составляющих:
 (34)
(34)
где Ifа — составляющая тока возбуждения, зависящая от активной составляющей тока статора, о.е.; Ifк— ток возбуждения в режиме работы СД фазокомпенсатором, когда ток статора можно считать реактивным, о.е.:
 (35)
(35)
где Ifо – ток возбуждения холостого хода СД при Uн. Ifо»0,435 о.е.
Из выражений (34), (35) следует, что в номинальном режиме

где Ifан — активная составляющая тока возбуждения в номинальном режиме СД, о.е.
В режиме, отличном от номинального, имеем
 (37)
(37)
 (38)
(38)
Подставляя (35) и (38) в (34) получим:

С учетом (32) можем записать выражение для функции If=f(a):
 (40)
(40)
Функция, обратная (40) a=f(If) называется U-образной характеристикой СД и отражает зависимость реактивной мощности, отдаваемой или потребляемой из сети, от тока возбуждения.
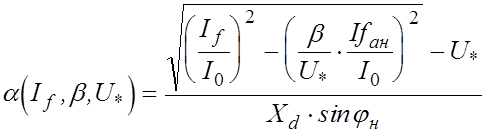
На величину реактивной мощности СД, как видно из (40), влияют текущая активная нагрузка двигателя, его номинальные параметры и рабочее напряжение на выводах двигателя.
Рабочее задание
1. Подготовить исходные данные в соответствии с вариантом задания.
2. Провести расчеты параметров и пусковых характеристик СДМР на ЭВМ.
3. Получить распечатку расчета.
4. Построить пусковые характеристики СДШП P=f(s), Q=f(s), I=f(s), M=f(s).
5. Исследовать влияния напряжения и нагрузки на валу двигателя на его U-образную характеристику:
— построить графики характеристики Q=f(If) при различных значениях напряжения на выводах двигателя Uсд и коэффициенте загрузки.
— используя полученные характеристики Q=f(If) при заданных U* и b построить графики зависимости If=f(U*) и If=f(b) при одном значении реактивной мощности двигателя в режиме перевозбуждения.
Ход работы.
1. Запустить на выполнение программу MCAD.
2. Загрузить в MCAD файл СХЕМА_СДМР.MCD.
3. Задать значения каталожных параметров синхронного двигателя согласно варианта (табл. 1) в соответствующих переменных.
4. Выполнить расчет параметров схемы замещения, убедиться, что погрешность расчета параметров Мв, Iп не превышает 0,001.
5. Убедиться, что расчетные значения параметров Iп, Мв, Мп совпадают с каталожными значениями.
6. Вывести на печать результаты расчетов параметров схемы замещения, пусковые и U-образные характеристики синхронного двигателя.
Указания по оформлению отчета
Отчет по работе должен содержать описание цели работы, распечатку результатов расчета, а также графики пусковых характеристик P=f(s), Q=f(s), I=f(s), M=f(s).В конце отчета должны быть написаны выводы по результатам исследований.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Вольдек А.И. Электрические машины. Л.; Энергия, 1978.
2. Гамазин С.И., Понаровкин Д.Б., Цырук С.А. Переходные процессы в электродвигательной нагрузке систем промышленного электроснабжения. М.; Московский энергетический институт, 1991.
3. Першина Л.М., Бак С.И., Першин Ю.М., Читипаховян С.П. Применение электродвигателей в нефтяной промышленности. М.; Недра, 1980.
ПРИЛОЖЕНИЕ
Таблица П3.
Варианты задания к лабораторным работам №1-3
Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по
правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
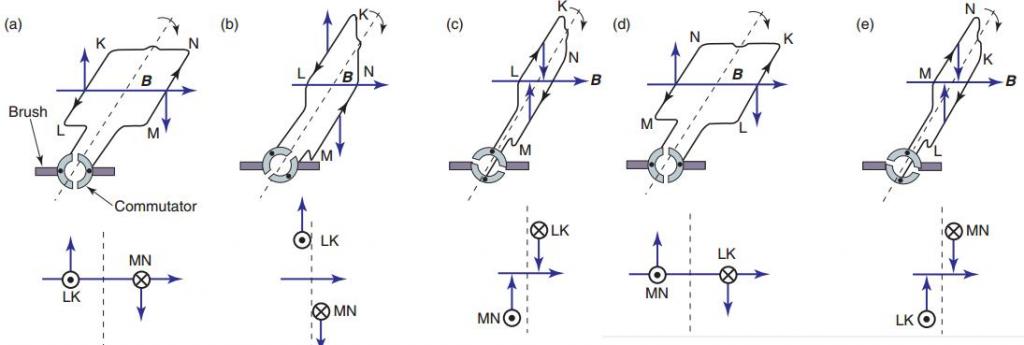
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Расчет синхронных двигателей с шихтованными полюсами. Расчет параметров и характеристик синхронных двигателей с массивным гладким ротором, страница 7
Устранить провалы в асинхронной моментной характеристике СД с шихтованным ротором можно путем включения обмотки возбуждения при пуске на дополнительное пусковое сопротивление. При значениях кратности сопротивления в цепи ротора Rfп/Rf ³ 4 провалы в асинхронной моментной характеристике исчезают. Таким образом, пусковое сопротивление обмотки возбуждения выполняет следующие функции: улучшает асинхронную моментную характеристику; позволяет увеличить скорость гашения магнитного поля СД; предотвращает перенапряжения в обмотке возбуждения, возникающие из-за большой скорости изменения тока возбуждения при отключении возбудителя.
Рабочее задание
1. Подготовить исходные данные в соответствии с вариантом задания.
2. Провести расчеты параметров и пусковых характеристик СДШП на ЭВМ.
3. Получить распечатку расчета.
4. Построить пусковые характеристики СДШП P=f(s), Q=f(s), I=f(s), M=f(s).
Ход работы.
1. Запустить на выполнение программу MCAD.
2. Загрузить в MCAD файл ПАРАМЕТРЫ_СДШП.MCD.
3. Задать значения каталожных параметров синхронного двигателя согласно варианта (табл. 1) в соответствующих переменных.
4. Выполнить расчет параметров схемы замещения, убедиться, что погрешность расчета параметров Мв, Iп не превышает 0,001, а расчетные значения параметров Iп, Мв, Мп совпадают с каталожными данными.
5. Построить графики характеристики M=f(s) при различных значениях Rп в системе MCAD.
6. Вывести на печать результаты расчетов параметров схемы замещения и пусковые характеристики синхронного двигателя.
Указания по оформлению отчета
Отчет по работе должен содержать описание цели работы, распечатку результатов расчета, а также графики пусковых характеристик P=f(s), Q=f(s), I=f(s), M=f(s).В конце отчета должны быть написаны выводы по результатам исследований.
Контрольные вопросы при защите работы
1. Какие обобщенные параметры СД характеризуются индуктивными сопротивлениями ?
2. Какие обобщенные параметры СД характеризуются электромагнитными постоянными времени ?
3. Как определить параметры пусковые характеристики СД через параметры схемы замещения ?
4. Как рассчитать параметры схемы замещения СДШП, являющиеся индуктивными сопротивлениями ?
5. Как рассчитать параметры схемы замещения СДШП, являющиеся активными сопротивлениями ?
ЛАБОРАТОРНАЯ РАБОТА №3
РАСЧЕТ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК СИНХРОННЫХ
ДВИГАТЕЛЕЙ С МАССИВНЫМ ГЛАДКИМ РОТОРОМ
Объект исследования и цель работы
Объектом исследований в настоящей лабораторной работе является синхронный двигатель с массивным гладким ротором (СДМР).
Цель работы — изучение методов расчета параметров схемы замещения, обобщенных параметров и пусковых характеристик СДМР по каталожным данным, закрепление навыков работы на ПЭВМ и выполнения расчетов в пакете MCAD.
Общая характеристика СДМР
К СДМР относятся неявнополюсные синхронные двигатели (СД) со скоростью вращения ротора nс=3000 об/мин (серия СТД, СТМ).
Ротор СДМР представляет собой единую стальную поковку с выфрезерованными пазами для обмотки возбуждения. В отличие от СД с шихрованным ротором, имеющих сосредоточенную демпферную обмотку, у СДМР система демпферированых контуров распределена по всей бочке ротора.
СДМР используются в качестве приводов к центробежным насосам, компрессорам и вентиляторам. Пуск СДМР осуществляется в основном от полного (иногда сниженного) напряжения сети при короткозамкнутой обмотке возбуждения. Параметры СД удобно выражать в относительных единицах при следующих базисных условиях: Sб=Sн — номинальная полная мощность СД; Uб=Uн — номинальное напряжение СД. Электромагнитный момент (в виде исключения) целесообразно выражать в долях от номинального момента на валу двигателя.
Схема подключения при пуске СДМР от полного напряжения сети (а) и схемы замещения по продольной (б) и поперечной (в) осям ротора приведены на рис.3. Параметрами схемы замещения являются (далее везде в скобках даны идентификаторы соответствующих параметров, принятых в программе для ЭВМ):
Расчёт асинхронного трехфазного двигателя с короткозамкнутым ротором
Содержание
Стр.
Содержание…………………………………………………………………… 2
Техническое задание ………………………………………………………. 3
1. Расчет главных размеров двигателя ……………………………………… 4
2. Расчет статора ……………………………………………………………….6
2.1 Станины ……………………………………………………………….. 6
2.2 Обмотки статора ………………………………………………………. 7
2.3 Зубцовой зоны …………………………………………………………8
3. Расчет ротора ……………………………………………………………….11
4. Расчет магнитной цепи ……………………………………………………15
4.1 Магнитное напряжение зазора ………………………………………. 16
4.2 Магнитное напряжение зубцовой зоны статора …………………… 16
4.3 Магнитное напряжение зубцовой зоны ротора …………………….. 17
Библиографический список ……………………………………………….18
Техническое задание:
Рассчитать асинхронный трехфазный двигатель с короткозамкнутым ротором :
номинальная мощность Р2Н = 7,5кВт;
номинальное напряжение UН = 220 В;
номинальный КПД ηн=87,5 %;
номинальный коэффициент мощности cos φн=0,86 о. e.;
число полюсов 2p=4;
скорость вращения ротора n1=1500 об/мин;
режим работы — S1, продолжительный;
серия 4А;
степень защиты IP44.
Степень защиты от воздействия окружающей среды IP44:
Оболочка (корпус) защищает двигатель от попадания внутрь и касания с токоведущими и движущимися частями твердых тел с диаметром более 1 мм. Защита от попадания внутрь корпуса брызг воды любого направления.
1 РАСЧЕТ ГЛАВНЫХ РАЗМЕРОВ ДВИГАТЕЛЯ.
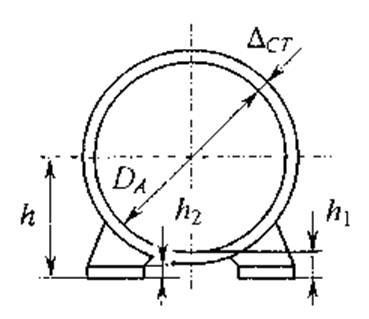
Рис. 1- К выбору внешнего диаметра статора DА.
Главными размерами асинхронной машины называют внутренний диаметр D1и расчетную длину lδмагнитопровода статора. Эти размеры связаны с расчетной мощностью Р’, электромагнитными нагрузками и А и Bδ, угловой механической скоростью вращения магнитного поля Ω1 с помощью машинной постоянной Арнольда СА, характеризующей использование внутреннего объема статора на единицу расчетного момента:
Из таблицы 2.2 [1] определяем высоту оси вращения h=132мм.
Максимально возможный внешний диаметр сердечника статора DAMAX, допускаемый конструкцией и технологией изготовления двигателя:
DAMAX=2(h-h1min)=2(132-13,844)=236 (мм),
Где h1min – минимально допустимое расстояние от нижней точки наружной поверхности сердечника статора до опорной плоскости лап, определяемое условиями крепления двигателя и защиты нижней части машины от случайных повреждений:
h1min=  +h2=8.6+5.244=13.844 (мм)
+h2=8.6+5.244=13.844 (мм)
Из таблицы 5.1 [1] выбираем внешний диаметр статора для h=132мм — DА=225мм.
Внутренний диаметр сердечника статора D1 определяется по выбранному внешнему диаметру DА приближенно:
D1 = DА• kD
Значение коэффициента kDв зависимости от числа полюсов берем из таблицы 5.2 [1].
kD=0,68
D1=0,68*225=153 (мм)
Полюсное деление (число пазов приходящиеся на один полюс):
 (мм)
(мм)
Расчетная мощность:
Значение коэффициента kЕ , равный отношению ЭДС обмотки статора к номинальному напряжению, приближенно определяем по рис. 5.2 [1]. kЕ=0,971
 (В·А)
(В·А)
Электромагнитные нагрузки – максимальная индукция в зазоре и линейная нагрузка статора выбираем по графикам электромагнитных нагрузок (рис. 5.3 а [1]):
Bδ= 0,87 Тл, A=26*103 А/м
Коэффициенты полюсного перекрытия  и формы поля
и формы поля  ,
характеризующие уплощения кривой индукции в зазоре за счет насыщения зубцов
сердечников статора и ротора, задаются сведущие:
,
характеризующие уплощения кривой индукции в зазоре за счет насыщения зубцов
сердечников статора и ротора, задаются сведущие:
Обмоточный коэффициент для
однослойной обмотки равен  .
.
Синхронная скорость вращения двигателя (угловая механическая скорость вращения магнитного поля):
 (рад/с)
(рад/с)
Расчетная длина магнитопровода:
 (м)
(м)
Отношение  находится в
пределах допустимых значений рис. 5.5 а [1].
находится в
пределах допустимых значений рис. 5.5 а [1].
2 РАСЧЕТ СТАТОРА.
2.1 Расчет станины
Станины выполняются в форме цилиндра из серого чугуна с продольными ребрами на внешней поверхности.
Средняя толщина стенки литой станины:

Внешний диаметр станины:
DСТ=DА+2=225+2*8,6=242,2 мм.
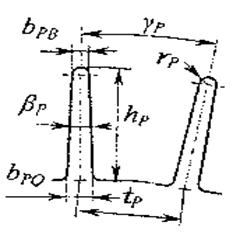
Рис. 1 – Сечение ребер станины с радиальным оребрением.
Из таблицы 4.2 б [1] для h определяем:
Шаг оребрения tp=15,8мм,
Средняя высота ребра hр=24мм,
Радиус rр=1,5мм,
К=0,58-0,6, βр=4
Количество ребер на поверхности литой станины:
Np≈K =
=
Ширина верхней части и основания ребра:


Наибольший размер станины по вершинам ребер:
DСТР=DСТ+2 hр =242,2+2*24=290,2мм
Минимально допустимое расстояние от нижней точки литой станины до опорной плоскости лап:

2.2 Расчет обмотки статора
Статорные обмотки асинхронных двигателей общего назначения выполняют распределенными, то есть состоящими из большого числа катушек, укладываемых в пазы на внутренней поверхности сердечника статора. Устройство и способ изолирования обмотки зависит от номинальных мощности и напряжения, условий эксплуатации машины и достигнутого уровня технологии электромашиностроения.
Требуемое расчетное сечение эффективного проводника получают параллельным соединением нескольких элементарных проводников меньшего сечения. Для уменьшения числа элементарных проводников увеличивают число параллельных ветвей обмотки.
Схема обмотки статора определяет положение катушек в пазах сердечника
Тип обмотки – однослойная концентрическая. Толщина изоляции 0,3 мм.
Рис. 2 – Сечение пазовой части обмотки.
Число пазов статора:
Значения пазового (зубцового) деления  определяем
по рис. 6.1 [1]: 0,009м и 0,014м
определяем
по рис. 6.1 [1]: 0,009м и 0,014м
Принимаем  =48.
=48.
Число пазов на полюс и фазу:
Пазовое деление статора (окончательное):
 (мм)
(мм)
Число эффективных проводников в пазу статора (α1=1):


 (А)
(А)

Число последовательно соединенных витков фазы статора:
Линейная нагрузка:
 (А/м)
(А/м)
Магнитный поток полюсного деления:
 (Вб)
(Вб)
Амплитуда индукции в зазоре:
Bδ= (Тл)
(Тл)
Плотность тока в обмотке статора (допустимая):
 (А/м2)
(А/м2)
 выбираем по графику рис.
6.2 а [1]. =180*109 А2/м2
выбираем по графику рис.
6.2 а [1]. =180*109 А2/м2
Расчёт параметров асинхронного короткозамкнутого двигателя (Пример использования возможностей компьютерной техники для решения инженерных задач), страница 4
1. Мощность, потребляемая двигателем из сети при номинальной нагрузке:

Формула EXCEL: =$C$5/$D$5
Линейный ток статора при номинальной нагрузке:
Формула EXCEL: =B33/(КОРЕНЬ(3)*$H$5*$E$8)
Фазный ток статора при номинальной нагрузке:
Формула EXCEL: =C33/(КОРЕНЬ(3)^(1-$A$8))
Фазное напряжение статора при номинальной нагрузке, где B0 — переменная, принимающая значение, равное нулю для схемы соединения обмоток статора «треугольник», будет равно:
Формула EXCEL: =H5/(КОРЕНЬ(3)^($A$8))
2.Синхронная частота вращения, где p — число пар полюсов, будет равна:
Формула EXCEL: =60*$B$5/$A$5
Номинальное скольжение и частота тока в роторе при номинальной частоте вращения:

Формула EXCEL для Sн: =(F33-$D$8)/F33
Формула EXCEL для f2H: =G33*$B$5
3.Общие потери в двигателе в номинальном режиме:

Формула EXCEL: =B33-$C$5
Потери на трение:
Формула EXCEL для Pтр: =B37*(F33/1000)^2*($C$8/1000)^3
Формула EXCEL для k: =3+0,5*(($C$8-100)/400)
Добавочные потери в двигателе:
Формула EXCEL: =0,005*B33
Активное сопротивление обмотки статора при 75 градусах Цельсия, где kT=1.24 — коэффициент, учитывающий изменение активного сопротивления обмотки статора при нагревании от 15 до 75 градусов Цельсия:

Формула EXCEL: =$F$8*$B$8
Потери в обмотках статора:

Формула EXCEL: =3*D33^2*D37
Полная механическая мощность:

Формула EXCEL: =$C$5+J33+C37
Потери в обмотках ротора:
Формула EXCEL: =G33/(1-G33)*F37
Потери в стали:

Формула EXCEL: =I33-E37-G37-J33-C37
4.Фазный и линейный токи в режиме холостого хода статора:


Формула EXCEL для I1Ф0 : =D33*$E$5
Формула EXCEL для I10 : =$E$5*C33
Потери в обмотках статора в режиме холостого хода:

Формула EXCEL: =3*I37^2*$B$8
Мощность, потребляемая двигателем в режиме холостого хода:

Формула EXCEL: =B41+J33+C37+h47
Коэффициент мощности и угол j0 в режиме холостого хода:

Формула EXCEL для cosj0: =C41/(КОРЕНЬ(3)*H5*J37)
Формула EXCEL для j0: =ACOS(D41)
5.Номинальный момент двигателя:
Формула EXCEL: =9,549*($C$5/$D$9)
Максимальный момент двигателя:

Формула EXCEL: =$F$5*F41
6.Критическое скольжение:

Формула EXCEL: =G33*($F$5+КОРЕНЬ($F$5^2-1))
7.Индуктивное сопротивление короткого замыкания, где U1ФН — номинальное фазное напряжение двигателя:
Формула EXCEL: =КОРЕНЬ((3*$A$5*E33^2/(4*3,14*$B$5*G41)-D37)^2-D37^2)
Приведённое активное сопротивление обмотки ротора:

Формула EXCEL для R’2: =G33*(B45+КОРЕНЬ(B45^2-(D37^2+I41^2)))
Формула EXCEL для k1: =3*$A$5*E33^2/(4*3,14*$B$5*F41)-D37
Модуль полного сопротивления контура намагничивания:

Формула EXCEL: =E33/I37
Активное и индуктивное сопротивления контура намагничивания:


Формула EXCEL для R0: =C41/(3*I37^2)
Формула EXCEL для X0: =КОРЕНЬ(C45^2-D45^2)
Активная и реактивная составляющие фазного тока намагничивания:


Формула EXCEL для I1Ф0А: =I37*COS(E41)
Формула EXCEL для I1Ф0Р: =-I37*SIN(-E41)
8.Активное сопротивление рабочей ветви:

Формула EXCEL: =$D$37+$J$41/B50
Примечание:
С данной формулы, согласно заданию, начинает изменяться скольжение по следующему закону S=(0,25;0,5;0,75;1,0;1,25)SН. В результате чего в EXCEL получаем по десять значений ответов для каждого параметра. В данной части курсовой работы представим в таблицах параметры двигателя, рассчитанные при значениях S=(0,25;0,5;0,75;1,0;1,25)SН для значения f=50 Гц. Все результаты вычислений при частоте 60 Гц приводим в таблице 5 приложения(стр.36-37)
Модуль полного сопротивления и фазовый угол рабочей ветви:

Формула EXCEL для Z11: =КОРЕНЬ(C50^2+$I$41^2)
Формула EXCEL для φ11: =-ATAN($I$41/C50)