
Геометрия Метод координат в пространстве. Скалярное произведение векторов
Для изучения новой темы понадобится повторить теорему о трех перпендикулярах.
Если прямая а, проведенная на плоскости α через основание О наклонной с, перпендикулярна её проекции в, то она перпендикулярна и самой наклонной.
Скалярным произведением двух векторов называется произведение их длин на косинус угла между ними. Скалярное произведение двух векторов это число.
Скалярное произведение векторов и обозначается так: (произведение вектора а на вектор бэ).
Таким образом:
(произведение вектора а на вектор бэ равно произведению модуль вектора а на модуль вектора бэ и на косинус угла между векторами а и бэ)
Справедливы утверждения:
1°.
Действительно, скалярное произведение вектора A на вектор B равно произведению их длин на косинус угла между ними. Но cos 90° = 0 следовательно b= 0.
2°. Скалярный квадрат вектора (то есть скалярное произведение вектора на себя) равен квадрату его длины.
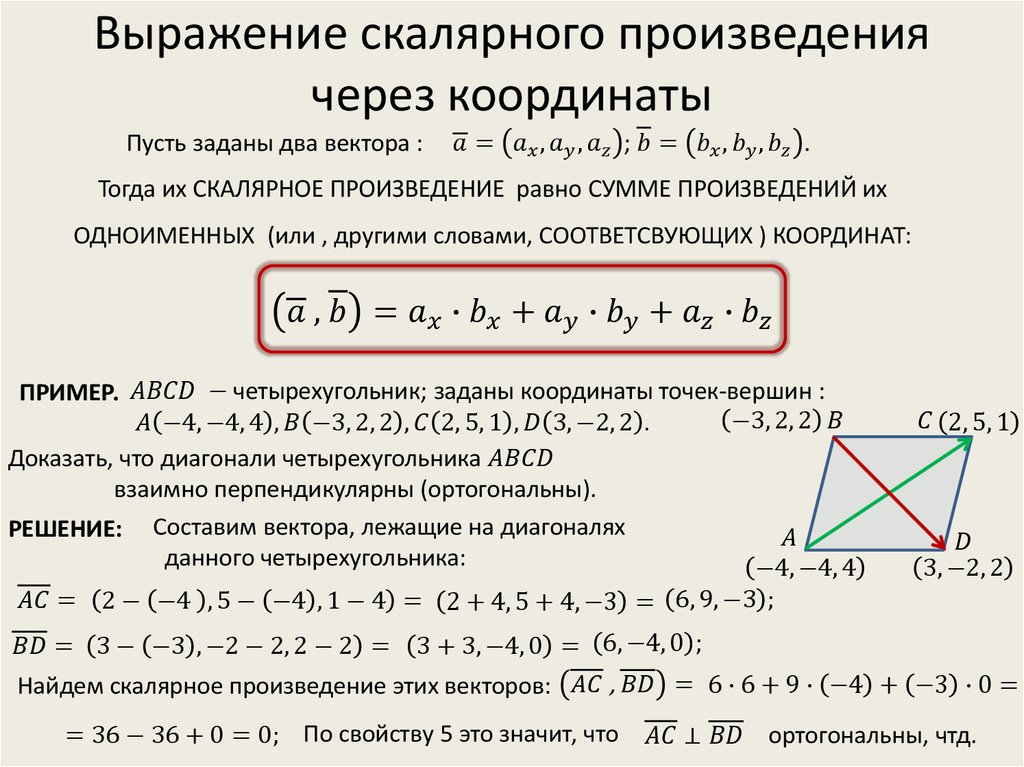
Скалярное произведение двух векторов можно вычислить через произведение соответственных координат этих векторов:
скалярное произведение векторов {х1; у
х1х2 + у1у2 + z1z2 (скалярное произведение двух векторов равно сумме произведений соответственных координат этих векторов).
Докажем утверждение:
Косинус угла α между ненулевыми векторами {х1; у1; z1} и {х2; у2; z2}
вычисляется по формуле:
cos α =Косинус угла альфа равен частному от деления суммы произведений соответственных координат векторов, которые составляют угол альфа, на произведение длин, выраженных координатами этих векторов
косинус угла альфа равен частному от деления скалярного произведения векторов на произведение их длин.
Таким образом, подставив вместо скалярного произведения вектора формулу суммы произведений соответственных координат векторов х1х2 + у1у2 + z1z2 , а также заменив произведение длин векторов на произведение длин векторов, выраженных через координаты
Что и требовалось доказать.
Сформулируем основные свойства скалярного произведения векторов.
Для любых векторов и любого числа k справедливо следующее:
1°. Скалярный квадрат вектора всегда больше либо равен нулю
2.переместительный закон – от перестановки мест векторов в скалярном произведении скалярное произведение не меняется.
3 (распределительный закон – скалярное произведение суммы двух
Скалярное произведение в координатах / Соотношения между сторонами и углами треугольника. Скалярное произведение векторов / Справочник по геометрии 7-9 класс
- Главная
- Справочники
- Справочник по геометрии 7-9 класс
- Соотношения между сторонами и углами треугольника. Скалярное произведение векторов
- Скалярное произведение в координатах
Теорема
В прямоугольной системе координат скалярное произведение векторов и выражается формулой (1) |
Доказательство
Дано: ,
Доказать:
Доказательство:
Каждая координата вектора равна разности соответствующих координат его конца и начала, поэтому если хотя бы один из векторов нулевой, то справедливость равенства очевидна, так как координаты нулевого вектора равны нулю.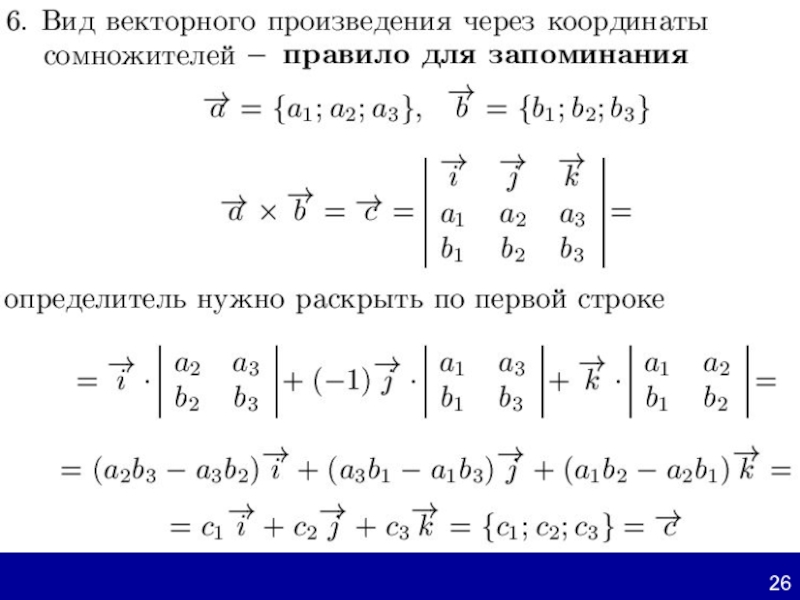
Рассмотрим ненулевые векторы и . Отложим от произвольной точки О векторы = и = :
1 случай: векторы и не коллинеарны:
Тогда по теореме косинусов получаем
. (2)
2 случай: векторы и сонаправленные:
Тогда и получаем, что
3 случай: векторы и противоположно направленные:
Тогда и получаем, что
Итак, мы получили, что равенство (2) верно для любых двух ненулевых векторов и .
Так как = — , = , = , то равенство (2) можно записать следующим образом:
Следовательно,
Вектора имеют следующие координаты , и ( — ), при этом длина вектора равна квадратному корню из суммы квадратов координат данного вектора, поэтому
,
Учитывая это, получаем
Итак, , что и требовалось доказать. Теорема доказана.
Следствие 1
| Ненулевые векторы и перпендикулярны тогда и только тогда, когда . |
Следствие 2
Косинус угла между ненулевыми векторами и выражается формулой . |
Советуем посмотреть:
Синус, косинус, тангенс, котангенс
Основное тригонометрическое тождество. Формулы приведения.
Формулы для вычисления координат точки
Теорема о площади треугольника
Теорема синусов
Теорема косинусов
Решение треугольников
Измерительные работы
Угол между векторами
Скалярное произведение векторов
Свойства скалярного произведения векторов
Соотношения между сторонами и углами треугольника. Скалярное произведение векторов
Правило встречается в следующих упражнениях:
7 класс
Задание 1044, Атанасян, Бутузов, Кадомцев, Позняк, Юдина, Учебник
Задание 18, Атанасян, Бутузов, Кадомцев, Позняк, Юдина, Учебник
Задание 20, Атанасян, Бутузов, Кадомцев, Позняк, Юдина, Учебник
Задание 1073, Атанасян, Бутузов, Кадомцев, Позняк, Юдина, Учебник
j$, если вы понимаете определение каждого символа, встречающегося в этой формуле.
Учитывая, что я написал ответ в первой ссылке, кажется уместным сказать несколько слов (которых, к сожалению, не так мало, как я надеялся). В общем случае, если у вас есть $n$-мерное (псевдо)риманово многообразие $(M,g)$, то для каждого $p\in M$ по определению $g_p$ является (псевдо) скалярным произведением на касательной пробел $T_pM$. Итак, если у вас есть два вектора $v,w\in T_pM$, величина $g_p(v,w)$ является элементом $\Bbb{R}$. Теперь, если у вас есть карта $(U,x)$ на многообразии (т.е. система координат), то для каждого $p\in U$ мы можем рассмотреть 9n$, когда вы впервые изучаете эти вещи) никогда не будет хорошей идеей, если вы уже не знаете, что делаете (в этом случае вы, конечно, можете делать все, что хотите) или если вы не используете диаграмму идентичности ( то есть декартовы координаты), потому что в этом случае все будет работать хорошо, хотя вы можете не до конца понимать, почему. Итак, если вы планируете использовать полярную/параболическую/гиперболическую/эллиптическую/сферическую или любые другие распространенные системы координат, вы должны быть особенно осторожны в отношении различий (поскольку $g_{ij}$ больше не являются постоянными функциями).
Просто ради интереса посмотрим, что получится, если мы выразим $v,w$ через $\frac{\partial}{\partial x}(p)$ и $\frac{\partial}{\partial у}(р)$. Итак, имеем следующую «формулу смены базиса»:
\начать{выравнивать}
\begin{случаи}
\frac{\partial}{\partial r}(p)&= \frac{\partial x}{\partial r}(p)\cdot \frac{\partial}{\partial x}(p) + \frac {\ парциальное у} {\ парциальное г} (р) \ cdot \ гидроразрыва {\ парциальное} {\ парциальное у} (р) \\
& = \ cos (\ тета (р)) \ гидроразрыва {\ парциальное} {\ парциальное х} (р) + \ грех (\ тета (р)) \ гидроразрыва {\ парциальное} {\ парциальное у} (р) \ \
&= \frac{1}{2}\frac{\partial}{\partial x}(p) + \frac{\sqrt{3}}{2}\frac{\partial}{\partial y}(p )\\\\
\frac{\partial}{\partial \theta}(p)&= \frac{\partial x}{\partial \theta}(p)\cdot \frac{\partial}{\partial x}(p) + \ гидроразрыва {\ парциальное у} {\ парциальное \ тета} (р) \ cdot \ гидроразрыва {\ парциальное} {\ парциальное у} (р) \\
& = -r (p) \ sin (\ theta (p)) \ frac {\ partial {\ partial x} (p) + r (p) \ cos (\ theta (p)) \ frac {\ partial} {\ парциальное у} (р) \\
&= -\sqrt{3}\frac{\partial}{\partial x}(p) + \frac{\partial}{\partial y}(p)
\end{случаи}
\end{выравнивание}
Итак, если вы делаете замены, вы должны найти
\начать{выравнивать}
v&= \left(\frac{1}{2}-\sqrt{3}\right)\frac{\partial}{\partial x}(p) +\left(\frac{\sqrt{3}}{ 2}+1\справа)\frac{\partial}{\partial y}(p)
\end{выравнивание}
и
\начать{выравнивать}
w&= -\sqrt{3}\frac{\partial}{\partial x}(p) + \frac{\partial}{\partial y}(p)
\end{выравнивание}
Другими словами, мы имеем $v^x=\frac{1}{2}-\sqrt{3}, v^y=\frac{\sqrt{3}}{2}+1, w^x=- \sqrt{3}, w^y=1$.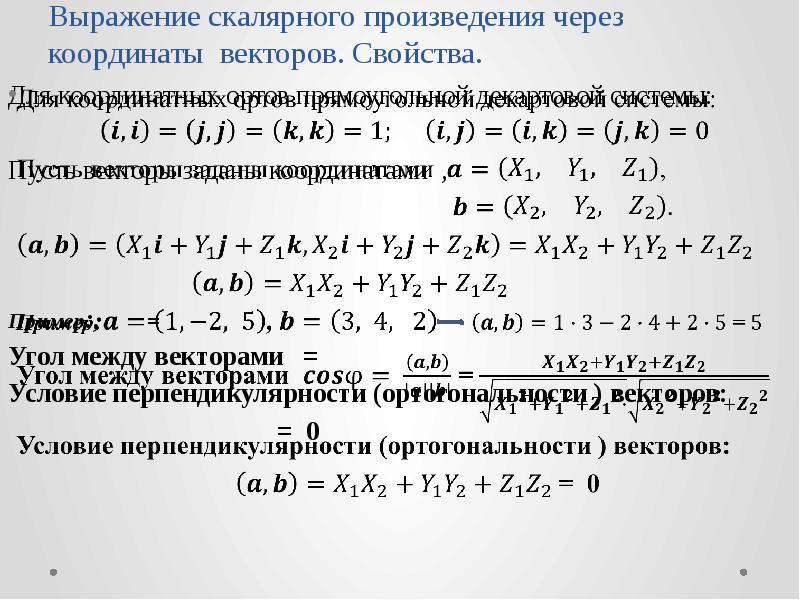
многомерное исчисление — скалярное произведение между двумя векторами в цилиндрических координатах?
В таких вопросах, как этот, я предпочитаю различать (евклидово) скалярное произведение двух векторов $\mathbf a$ и $\mathbf b$, определяемое как $\langle\mathbf a,\mathbf b\ rangle = \lVert\mathbf a\rVert \lVert\mathbf b\rVert\cos\phi$, где $\phi$ — угол между векторами, а 9TM=I$ и формула сводится к скалярному произведению. Итак, в любом ортонормированном базисе евклидово скалярное произведение двух векторов равно скалярному произведению их координат.
Говоря об операторах $\operatorname{grad}$ и им подобных, мы имеем дело с векторными полями, и в этом контексте также важно различать точки и векторы. Основная идея состоит в том, что к каждой точке прикреплено векторное пространство, состоящее из всех возможных касательных векторов к кривым, проходящим через эту точку — 9n$, поэтому мы обычно можем идентифицировать точки с векторами и беспечно перемещать касательные векторы от точки к точке.
Базисные векторы $\hat{\mathbf r}$, $\hat{\mathbf\theta}$ и $\hat{\mathbf z}$ живут в этих касательных пространствах, как и стандартные базисные векторы $\hat {\mathbf i}$, $\hat{\mathbf j}$ и $\hat{\mathbf k}$, и преобразование между ними не является преобразованием цилиндрической точки в декартову координату, которое вы использовали. Эти цилиндрические базисные векторы для касательного пространства в точке являются единичными нормалями к поверхностям $r=\text{const}$, $\theta=\text{const}$ и $z=\text{const}$, которые проходят через смысл. Ясно, что эти векторы меняются от одной точки к другой. Должно быть легко видеть, что эти единичные векторы попарно ортогональны, поэтому в цилиндрических координатах внутреннее произведение двух векторов является скалярным произведением координат, как и в стандартном базисе.
Вы можете убедиться в этом напрямую. Немного поработав, мы можем найти, что $$\begin{bmatrix}\hat{\mathbf r}\\\hat{\mathbf\theta}\\\hat{\mathbf z}\end{bmatrix} = \ begin{bmatrix}\cos\theta&\sin\theta&0\\-\sin\theta&\cos\theta&0\\0&0&1\end{bmatrix} \begin{bmatrix}\hat{\mathbf i}\\\hat{\mathbf j}\\\hat{\mathbf k}\end{bmatrix}$$ так, что $$\hat{\mathbf A} = A_r\hat{\mathbf r}+A_\theta\hat{\mathbf\theta} +A_z\hat{\mathbf z} = (A_r\cos\theta-A_\theta\sin\theta)\,\hat{\mathbf i} + (A_r\sin\theta+A_\theta\cos\theta) \,\hat{\mathbf j}+A_z\,\hat{\mathbf k}$$ и аналогично для $\hat{\mathbf B}$.