Приведенный трансформатор: характеристика, виды, особенности
Трансформатор – электрическое изделие, которое оказывает определенное влияние на показатель напряжения переменного тока. Его принцип действия основывается на таком физическом явлении, как электромагнитная индукция. Существует несколько разновидностей, каждая из них отличается конструкцией, назначением и характеристиками. К таким устройствам относится приведенный трансформатор.
Общие сведения
Трансформатор – распространенное электротехническое устройство, которое является статическим электромагнитным изделием, предназначенным для трансформации системы переменного тока с сохранением частоты, но изменением тока и напряжения. Созданию этого аппарата предшествовали несколько условий.
В конце 19-го века промышленность стремительно развивалась, что привело к увеличению необходимости в передаче электроэнергии на большие расстояния. В процессе исследований удалось определить, что самый простой и результативный способ решения – повышение значения напряжения на линии. Период изобретения производительного и экономичного трансформатора совпал с успехами в электротехнической сфере.

Опыт конструкторов и инженеров позволил реализовать совершенно новую модель, принцип работы которой лежит в основе современных агрегатов. Главным открытием стал закон электромагнитной индукции, появившийся в 1831 году.
Важно! М. Фарадей на практике доказал возможность трансформации магнетизма в электрическую энергию, что и послужило основой для появления трансформатора.
Разновидности
Научный прогресс привел к появлению нескольких видов трансформаторов, которые активно используются не только промышленности, но и в других сферах. Каждый вид отличается техническими характеристиками, способом функционирования и имеет характерные конструктивные особенности. В целом их принцип работы одинаковые, но встречаются уникальные устройства, например, это приведенный трансформатор.

К основным видам относятся:
- Силовой. Распространенная разновидность, предназначенная для изменения электроэнергии в сетях энергетических систем с переменным током, а также в осветительных системах и промышленности. Силовое устройство является частью подстанций комплектного типа. Разделяется на несколько видов по показателю напряжения и числу фаз. Отличительной чертой считается высокий КПД, у некоторых моделей он достигает 99%. Также к преимуществам относится устойчивость к перегреву, простота обслуживания и повышенные технические параметры.

- Автотрансформаторы. Между собой обмотки соединены гальваническим методом. За счет незначительных коэффициентов изменения U обладают скромными размерами и ценой, нежели многообмоточные модели. К недостаткам относится невозможность реализации гальванической изоляции электроцепей. Эта разновидность получила широкое применение, она способна приводить в действие и поддерживать работоспособное состояние пусковых систем больших электрических аппаратов с переменным током, а также в устройства релейной защиты.

- Измерительный. Позволяют изменить напряжение с повышенной точностью. Разделяются на высоко- и низковольтные. Вторичная обмотка взаимосвязана с измерительными приспособлениями (счетчиками, вольтметрами, амперметрами, реле тока). Изделие способно изолировать измеряющие устройства от всевозможных негативных факторов, а еще открывает возможности для стандартизации оборудования.

- Импульсный. Характеризуется наличием ферромагнитного сердечника, который применяется для импульсной работы. Получили распространение в электровычислительных аппаратах, в счетчиках электроэнергии, системах радиолокации. Принцип работы импульсного устройства основан на сохранении формы импульса. Такой результат удается достичь за счет понижения емкости между витками, уменьшения индуктивного рассеивания путем установки небольших сердечников и сокращения количества обмоток.

Каждая разновидность применяется в конкретном случае, но есть еще одна менее распространенная – пик-трансформаторы. Агрегат меняет напряжение синусоидального типа в импульсное, при этом полярность разная каждые полпериода. Отдельного внимания заслуживает приведенный тип.
Особенности приведенного трансформатора
Для начала необходимо выяснить, что же такое приведенный трансформатор. Приведенная модель представляет собой устройство, оказывающее на цепь такое же воздействие, как и стандартный трансформатор, но при этом его показатель трансформации равен 1. В обычном изделии характеристики первичной обмотки существенно различаются в сравнении с вторичной. Максимальное отличие заметно при высоких показателях трансформации, что усложняет расчет и создание векторных диаграмм.

Электрические векторные величины обмотки первичного типа имеют другую длину, нежели аналогичные векторы обмотки вторичного типа. С данной проблемой можно справится, если основные параметры привести к одному количеству витков, к примеру, W1. Для этого пересчитываются показатели вторичной обмотки с учетом W1. Удается получить устройство эквивалентного вида, где k=W1/W2=1, он имеет ряд отличительных особенностей от стандартной (реальной) модели, где k=W1/W2.
Приведение характеристик не отражается на процессе функционирования трансформатора, фаза и мощность обмотки вторичного типа идентичны реальному трансформатору. К примеру, мощность реального устройства S2=Е2 I2 равна показателю мощности вторичной обмотки приведенного изделия. Вот, чем отличается приведенный трансформатор от неприведенного.
4.5.Приведенный трансформатор
В общем случае
параметры первичной обмотки трансформатора
отличаются от параметров вторичной
обмотки. Разница наиболее ощутима при
больших коэффициентах трансформации,
что затрудняет расчеты и (особенно)
построение векторных диаграмм. Векторы
электрических величин, относящиеся к
первичной обмотке, значительно отличаются
по своей длине от одноименных векторов
вторичной обмотки. Затруднения можно
устранить, если привести все параметры
трансформатора к одинаковому числу
витков, например, к w получаютэквивалентный трансформаторс
получаютэквивалентный трансформаторс Такой
трансформатор называетсяприведенным
Такой
трансформатор называетсяприведенным
 то
она должна быть равна полной мощности
вторичной обмотки приведенного
трансформатора:
то
она должна быть равна полной мощности
вторичной обмотки приведенного
трансформатора: 
Используя ранее полученное выражение I 2‘ = I2w2/w1, напишем выражение для E2‘:

Приравняем теперь активные мощности вторичной обмотки:

Определим приведенное активное сопротивление:

по аналогии:
Уравнения ЭДС и токов для приведенного трансформатора теперь будут иметь вид:


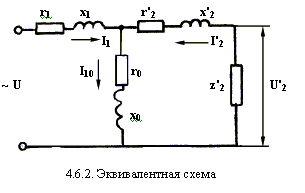
4.6.Эквивалентная схема трансформатора
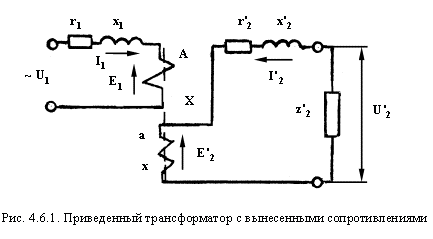
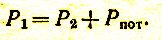
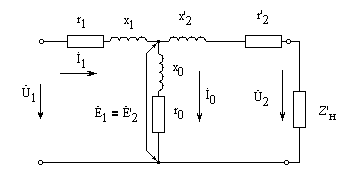
Одним из методических приемов, облегчающих исследование электромагнитных процессов и расчет трансформаторов, является замена реального трансформатора с магнитными связями между обмотками эквивалентной электрической схемой (рис. 4.6.1).
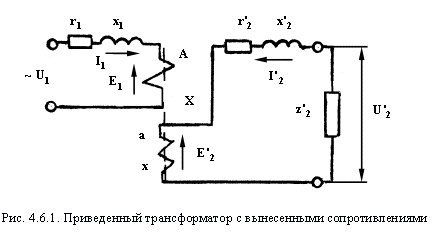
На этом рисунке представлена эквивалентная схема приведенного трансформатора, на которой сопротивления г и х условно вынесены из соответствующих обмоток и включены с ними последовательно. Т.к. k = 1, то E1= E2. Поэтому точки А и а, а также Х и х на приведенном трансформаторе имеют одинаковые потенциалы, что позволит электрически соединить эти точки, получив Т-образную эквивалентную схему замещения (рис. 4.6.2).
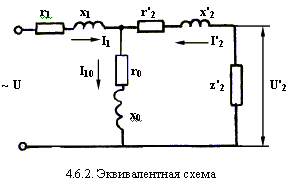
Произведя математическое описание этой схемы методами Кирхгофа, можно сделать вывод о том, что она полностью соответствует уравнениям ЭДС и токов реального трансформатора (см. раздел 4.5). Отсюда появляется возможность электрического моделирования трансформатора на ЭВМ. Проводя исследования относительно нагрузки z2‘ (единственного переменного параметра схемы), можно прогнозировать реальные ха-рактеристики трансформатора, начиная от холостого хода (z2‘= ) и кончая коротким замыканием (z2‘ = 0).
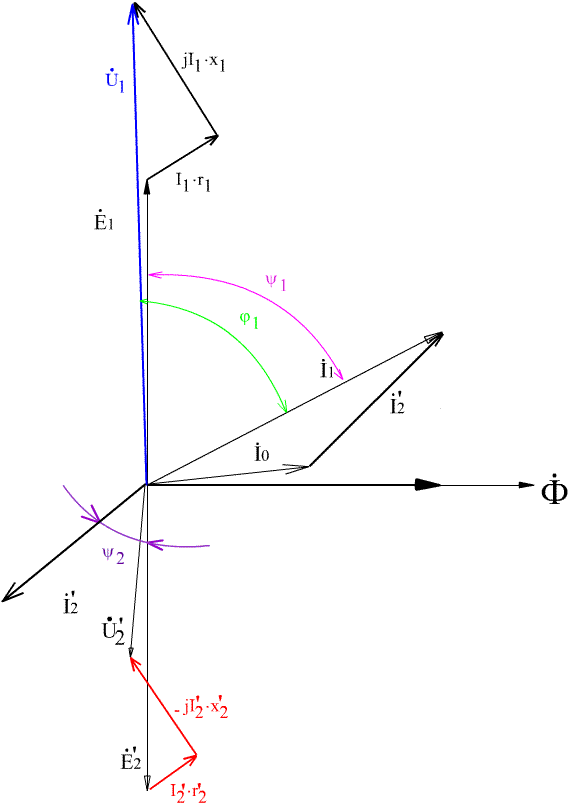
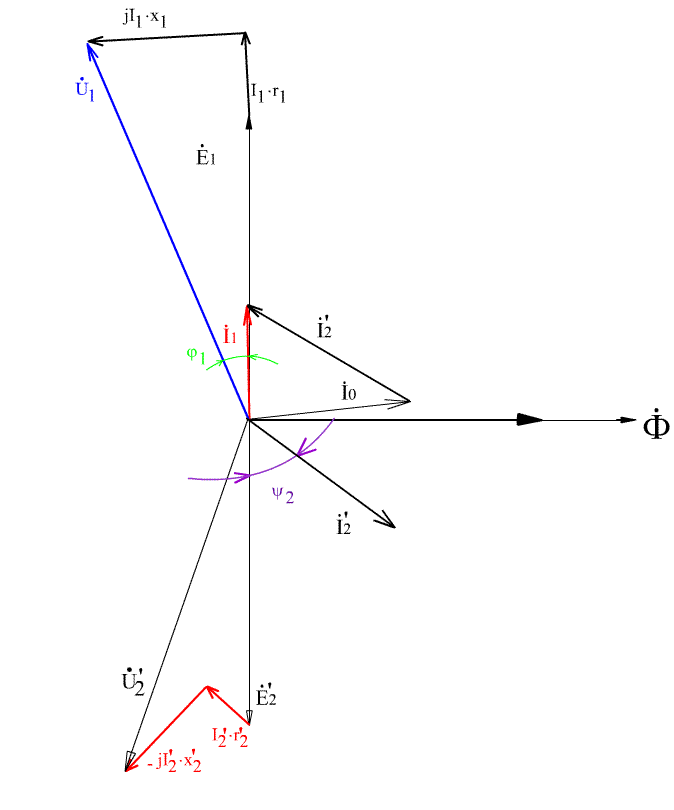
4.7. Векторная диаграмма трансформаторов
Построение векторной
диаграммы удобнее начинать с вектора
основного потока Ф. Отложим его по оси
абсцисс. Вектор I10опережает его
на угол. Далее
строим векторы ЭДС Е1и Е2‘,
которые отстают от потока Ф на 90°. Для
определения угла сдвига фаз между E2‘
и I2‘ следует знать характер
нагрузки. Предположим, она —
активно-индуктивная. Тогда I2‘
отстает от E2’ на угол2.
Получилась
так называемая заготовка векторной
диаграммы (рис. 4.7.1.). Для того чтобы
достроить ее, необходимо воспользоваться
тремя основными уравнениями приведенного
трансформатора.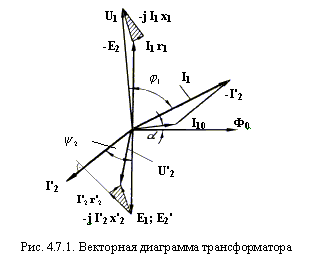
Воспользуемся вторым основным уравнением:

и произведем сложение векторов. Для этого к концу вектора E2‘ пристроим вектор — j I2‘ x2‘, а к его концу — вектор — I2‘ r2‘. Результирующим вектором U2‘ будет вектор, соединяющий начало координат с концом последнего вектора. Теперь используем третье основное уравнение
из которого видно, что вектор тока I1состоит из геометрической суммы векторов I10и — I2‘. Произведем это суммирование и достроим векторную диаграмму. Теперь вернемся к первому основному уравнению:

Чтобы построить вектор — Е1, нужно взять вектор +Е1и направить его в противоположную сторону. Теперь можно складывать с ним и другие векторы: + j I1x1и I1r1. Первый будет идти перпендикулярно току, а второй — параллельно ему. В результате получим суммарный вектор u1. Построенная векторная диаграмма имеет общий характер. По этой же методике можно осуществить ее построение как для различных режимов, так и для разных характеров нагрузки.
4.5.Приведенный трансформатор
В общем случае
параметры первичной обмотки трансформатора
отличаются от параметров вторичной
обмотки. Разница наиболее ощутима при
больших коэффициентах трансформации,
что затрудняет расчеты и (особенно)
построение векторных диаграмм. Векторы
электрических величин, относящиеся к
первичной обмотке, значительно отличаются
по своей длине от одноименных векторов
вторичной обмотки. Затруднения можно
устранить, если привести все параметры
трансформатора к одинаковому числу
витков, например, к w1. С этой целью
параметры вторичной обмотки пересчитываются
на число витков w1.
Таким образом,
вместо реального трансформатора с
коэффициентом трансформации получаютэквивалентный трансформаторс
получаютэквивалентный трансформаторс Такой
трансформатор называетсяприведенным.
Приведение параметров трансформатора
не должно отразиться на его энергетическою
процессе, т.е. все мощности и фазы
вторичной обмотки должны остаться
такими же, что и в реальном трансформаторе.
Так,
например, если полная мощность вторичной
обмотки реального трансформатора
Такой
трансформатор называетсяприведенным.
Приведение параметров трансформатора
не должно отразиться на его энергетическою
процессе, т.е. все мощности и фазы
вторичной обмотки должны остаться
такими же, что и в реальном трансформаторе.
Так,
например, если полная мощность вторичной
обмотки реального трансформатора то
она должна быть равна полной мощности
вторичной обмотки приведенного
трансформатора:
то
она должна быть равна полной мощности
вторичной обмотки приведенного
трансформатора:

Используя ранее полученное выражение I 2‘ = I2w2/w1, напишем выражение для E2‘:

Приравняем теперь активные мощности вторичной обмотки:

Определим приведенное активное сопротивление:

по аналогии:
Уравнения ЭДС и токов для приведенного трансформатора теперь будут иметь вид:


4.6.Эквивалентная схема трансформатора
Одним из методических приемов, облегчающих исследование электромагнитных процессов и расчет трансформаторов, является замена реального трансформатора с магнитными связями между обмотками эквивалентной электрической схемой (рис. 4.6.1).
На этом рисунке представлена эквивалентная схема приведенного трансформатора, на которой сопротивления г и х условно вынесены из соответствующих обмоток и включены с ними последовательно. Т.к. k = 1, то E1= E2. Поэтому точки А и а, а также Х и х на приведенном трансформаторе имеют одинаковые потенциалы, что позволит электрически соединить эти точки, получив Т-образную эквивалентную схему замещения (рис. 4.6.2).
Произведя математическое описание этой схемы методами Кирхгофа, можно сделать вывод о том, что она полностью соответствует уравнениям ЭДС и токов реального трансформатора (см. раздел 4.5). Отсюда появляется возможность электрического моделирования трансформатора на ЭВМ. Проводя исследования относительно нагрузки z2‘ (единственного переменного параметра схемы), можно прогнозировать реальные ха-рактеристики трансформатора, начиная от холостого хода (z2‘= ) и кончая коротким замыканием (z2‘ = 0).
4.7. Векторная диаграмма трансформаторов
Построение векторной
диаграммы удобнее начинать с вектора
основного потока Ф. Отложим его по оси
абсцисс. Вектор I10опережает его
на угол. Далее
строим векторы ЭДС Е1и Е2‘,
которые отстают от потока Ф на 90°. Для
определения угла сдвига фаз между E2‘
и I2‘ следует знать характер
нагрузки. Предположим, она —
активно-индуктивная. Тогда I2‘
отстает от E2’ на угол2.
Получилась
так называемая заготовка векторной
диаграммы (рис. 4.7.1.). Для того чтобы
достроить ее, необходимо воспользоваться
тремя основными уравнениями приведенного
трансформатора.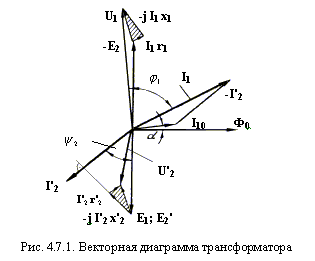
Воспользуемся вторым основным уравнением:

и произведем сложение векторов. Для этого к концу вектора E2‘ пристроим вектор — j I2‘ x2‘, а к его концу — вектор — I2‘ r2‘. Результирующим вектором U2‘ будет вектор, соединяющий начало координат с концом последнего вектора. Теперь используем третье основное уравнение
из которого видно, что вектор тока I1состоит из геометрической суммы векторов I10и — I2‘. Произведем это суммирование и достроим векторную диаграмму. Теперь вернемся к первому основному уравнению:

Чтобы построить вектор — Е1, нужно взять вектор +Е1и направить его в противоположную сторону. Теперь можно складывать с ним и другие векторы: + j I1x1и I1r1. Первый будет идти перпендикулярно току, а второй — параллельно ему. В результате получим суммарный вектор u1. Построенная векторная диаграмма имеет общий характер. По этой же методике можно осуществить ее построение как для различных режимов, так и для разных характеров нагрузки.
2.3. Приведенный трансформатор
Так как в общем случае W2 W1, тоE2 E1,I2 I1, и параметры первичной обмотки трансформатора отличаются от параметров вторичной обмотки. Это затрудняет количественный учет процессов, происходящих в трансформаторе, и построение векторных диаграмм, особенно при коэффициентах трансформации, существенно отличающихся от единицы. Чтобы избежать этих затруднений, пользуются способом, при котором обе обмотки трансформатора приводятся к одинаковому числу витков (K = W1/W2 = 1), обычно к числу витков первичной обмоткиW1. Для этого пересчитывают вторичную обмотку с числом витковW2на эквивалентную ей приведенную обмотку, имеющую число витковW1, как и первичная, но с условием, чтобы эта операция приведения не отразилась на энергетическом процессе трансформатора и, следовательно, на режиме работы первичной обмотки.
Все величины,
относящиеся к приведенной вторичной
обмотке, называются приведенными и
обозначаются теми же символами, что и
действительные величины, но со штрихом,
например,  ,
,  ,
,  и т. д.
и т. д.
Определим приведенные
параметры трансформатора. Ранее уже
упоминалось о приведенном токе  = I2/K(см. с. 18).
= I2/K(см. с. 18).
Из условия равенства мощностей
U2I2 =  (23)
(23)
получим  = KU2и, аналогично,
= KU2и, аналогично,
 = E2.
(24)
= E2.
(24)
Так как при
приведении вторичной обмотки к первичной
мощности не изменяются, то и потери в
меди в действительной и приведенной
обмотках должны быть равны, т. е.  ,
откуда:
,
откуда:
 = K2r2.
(25)
= K2r2.
(25)
Исходя из постоянства
соотношения  ,
получим:
,
получим:
 = 2
= 2 .
(26)
.
(26)
С учетом уравнений (25) и (26) запишем:
 = K2Z2.
(27)
= K2Z2.
(27)
Уравнения электрического состояния первичной и вторичной обмоток приведенного трансформатора соответственно:
 ,
(28)
,
(28)
 .
(29)
.
(29)
2.4. Схема замещения приведенного трансформатора
Аналитические и графические исследования работы трансформатора упрощаются, если реальный трансформатор, в котором обмотки связаны между собой электромагнитно, заместить схемой, элементы которой связаны между собой только электрически. Бывают Т- и Г-образные схемы замещения. В теории трансформаторов пользуются Т-образной схемой замещения. На рис. 8 представлена схема приведенного трансформатора.
|
Рис. 8. Схема приведенного трансформатора |

|
Рис. 9. Схема приведенного трансформатора с объединенной обмоткой на сердечнике |

Каждая
обмотка такого эквивалентного
трансформатора состоит из двух
последовательно соединенных катушек,
одна из которых без рассеяния и потерь
в меди наматывается на сердечник
трансформатора, а другая — представляет
собой реактор без стального сердечника,
имеющий активное и индуктивное
сопротивления соответствующей обмотки.
Как было установлено в разделе 2.3, в
приведенном трансформаторе W2 = W1 (K = 1), а поэтому  .
В результате точкиb и b,
а также точки с и с
на схеме имеют одинаковые потенциалы.
Это позволяет электрически соединить
указанные точки, т. е. обмотки, намотанные
на сердечнике трансформатора, можно
совместить в одну, по которой протекает
ток холостого хода, называемый
намагничивающим током,
.
В результате точкиb и b,
а также точки с и с
на схеме имеют одинаковые потенциалы.
Это позволяет электрически соединить
указанные точки, т. е. обмотки, намотанные
на сердечнике трансформатора, можно
совместить в одну, по которой протекает
ток холостого хода, называемый
намагничивающим током,  (рис. 9).
(рис. 9).
В
этом случае объединенная обмотка играет
роль намагничивающего контура, который
создает основной магнитный поток 0.
Мощность, расходуемая в этой обмотке,
определяется потерями в стали  ,
гдеrм — активное (фиктивное) сопротивление
намагничивающего контура, обусловленное
потерями в стали. Т-образная схема
замещения приведенного трансформатора
будет иметь вид, представленный на рис.
10.
,
гдеrм — активное (фиктивное) сопротивление
намагничивающего контура, обусловленное
потерями в стали. Т-образная схема
замещения приведенного трансформатора
будет иметь вид, представленный на рис.
10.

Рис. 10. Т-образная схема замещения приведенного трансформатора
Реактивное сопротивление хм намагничивающего контура — индуктивное сопротивление взаимоиндукции, обусловленное магнитным сопротивлением основному потоку 0. Мощность, выделяемая в нем, есть намагничивающая мощность. Сопротивление zм = rм + jxм — комплексное сопротивление ветви намагничивания.
Таким образом, в электрической схеме замещения трансформатора магнитная связь между цепями заменена электрической. Схема замещения приведенного трансформатора удовлетворяет всем уравнениям ЭДС (28), (29) и токов (17) приведенного трансформатора и представляет собой совокупность трех ветвей:
первичной
— сопротивлением  и током
и током ;
;
намагничивающей
— сопротивлением zм = rм + jxм и током  ;
;
вторичной — с двумя сопротивлениями:
сопротивлением
собственно вторичной ветви  и сопротивлением нагрузки
и сопротивлением нагрузки и током
и током .
.
Изменением сопротивления нагрузки Zн на схеме замещения могут быть воспроизведены все режимы работы трансформатора.
В
силовых трансформаторах ток холостого
хода I0 мал, составляет 0,810
% от номинального. При нагрузках, близких
к номинальным, им можно пренебречь, т.
е. считать, что zм = .
Тогда из выражения (17)  =
= ,
и упрощенная схема замещения примет
вид, представленный на рис. 11.
,
и упрощенная схема замещения примет
вид, представленный на рис. 11.

Рис. 11. Упрощенная схема замещения трансформатора
В
этой схеме rк = r1 +  ;xsк =
;xsк =  +
+  — активное и индуктивное сопротивления
обмоток трансформатора соответственно.
— активное и индуктивное сопротивления
обмоток трансформатора соответственно.
Все параметры схемы замещения трансформатора могут быть определены из опыта холостого хода и опыта короткого замыкания (раздел 2.7).
21Приведенный трансформатор.
Для возможного сравнения векторных диаграмм, чтобы строить их в одном масштабе ЭДС E2/ω2 на один виток. E2/=(E2/ ω2) ω1=nE2=E1 ω2, ω1 – число витков первичной и вторичной обмотки.
Из равенства полных мощностей можно записать E2` I2` = E2 I2 , E2` I2` — для приведенного трансформатора, E2 I2 – для реального трансформатора, отсюда следует I2` = E2 I2/ E2`= E2 I2/ nE2= I2/n. Из равенства мощностей реального и приведенного трансформатора можно записать
tgφ2= x2/ /R2/ = x2 /R2 отсюда находим приведенное значение индуктивного сопротивления
x2/= x2 R2/ /R2=n2х2, приведенное значение полных сопротивлений z2/= n2 z2.
22Опыты холостого хода и короткого замыкания трансформатора.
в опыте холостого хода вторичная обмотка трансформатора замкнута , а к первичной подводится номинальная , т.е. паспортное напряжение. Измеряют U1Н, I1Х, PХ,U2Х, по данным опыта определяют Z0= U1Н/ I1Х, R0= PХ/ I1Х2, х0=
 ,
n=
U1Н/
U2Х;
U1Н –
мал и составляет не более 5-10% от
номинального значения мощности,
измеренная в опыте холостого хода это
мощность потерь в сердечнике трансформатора
∆Р0=Рх.
Т.к. основной магнитный поток не зависит
от трансформатора, то и магнитные потери
не зависят от нагрузки. ∆Р0=Рх=const.
,
n=
U1Н/
U2Х;
U1Н –
мал и составляет не более 5-10% от
номинального значения мощности,
измеренная в опыте холостого хода это
мощность потерь в сердечнике трансформатора
∆Р0=Рх.
Т.к. основной магнитный поток не зависит
от трансформатора, то и магнитные потери
не зависят от нагрузки. ∆Р0=Рх=const.В опыте короткого замыкания вторичная обмотка трансформатора замыкается накоротко, а в первичной обмотке подводится пониженное напряжение такой величины, чтобы токи в обмотках были равны номинальным. Номинальные токи можно определить по паспортным данным трансформатора.
 ,
n=
U1Н/
U2Х;
U1Н –
мал и составляет не более 5-10% от
номинального значения мощности,
измеренная в опыте холостого хода это
мощность потерь в сердечнике трансформатора
∆Р0=Рх.
Т.к. основной магнитный поток не зависит
от трансформатора, то и магнитные потери
не зависят от нагрузки. ∆Р0=Рх=const.
,
n=
U1Н/
U2Х;
U1Н –
мал и составляет не более 5-10% от
номинального значения мощности,
измеренная в опыте холостого хода это
мощность потерь в сердечнике трансформатора
∆Р0=Рх.
Т.к. основной магнитный поток не зависит
от трансформатора, то и магнитные потери
не зависят от нагрузки. ∆Р0=Рх=const.I1Н=SН/ U1Н; I2Н=SН/ U2Н.
Обычно
напряжение U1К мало и составляет 5-10% от U1Н измеряют Q,
U1К,
I1Н и
РК,
по данным опыта можем рассчитать: ZК=
U1Н/
I1Н,
RК=
РК / I1Н2,
хК= .
Мощность измеренная в опыте короткого
замыкания, это мощность потерь в обмотках
трансформатора при номинальных токах.
∆РЭЛ.Н=РК.
В режиме отличающемся от номинального
электрические потери равны ∆РЭЛ.Н=RК I2=
РК / I1Н2 I12= β2 РК=
var.
Var
– переменные потери. β = I1 / I1Н= I2 / I2Н—
коэффициент загрузки трансформатора.
.
Мощность измеренная в опыте короткого
замыкания, это мощность потерь в обмотках
трансформатора при номинальных токах.
∆РЭЛ.Н=РК.
В режиме отличающемся от номинального
электрические потери равны ∆РЭЛ.Н=RК I2=
РК / I1Н2 I12= β2 РК=
var.
Var
– переменные потери. β = I1 / I1Н= I2 / I2Н—
коэффициент загрузки трансформатора.
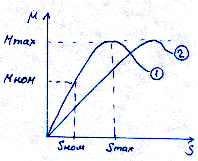
24.Рабочие характеристики трансформатора.
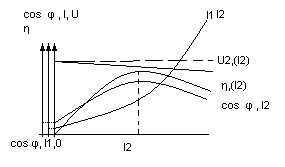
Из рабочих характеристик видно, что трансформатор не выгодно эксплуатировать с недогрузкой , когда I2 < I2Н , т.к. при этом КПД и cos φ, имеют низкие значения. Зависимость U2 =f(I2) называется внешней характеристикой трансформатора. Из этой характеристики видно , что U2 с ростом I2 меняется незначительно , не более чем на 5-10% , т.е. трансформатор обеспечивает высокое качество электроэнергии. Ток I1 с ростом I2 меняется практически пропорционально I2.
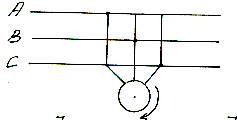
25Трехфазные трансформаторы. Трансформатор – это статическое электромагнитное устройство, для преобразования электроэнергии переменного тока одного напряжения в энергию переменного тока другого напряжения при одной и той же частоте. Трансформирование энергии в 3-ехфазной цепи можно осуществлять тремя однофазными трансформаторами или спец-ым трехфазным трансформатором. Группу однофазных трансформаторов применяют при очень больших мощностях в связи с простотой их трансформации от завода изготовителя. Поэтому чаще применяют трехф-ые транс-ры, т.к. они дешевле и имеют меньшие габариты. Трехфазный трансформатор состоит из сердечника набранного из тонких изолированных листов электротехнической стали, а также трех первичных и вторичных обмоток. АВС – начальные фазы обмоток высшего напряжения, ХУZ – их концы, аbc-начальные фазы обмоток низшего напряжения xyz- их концы.
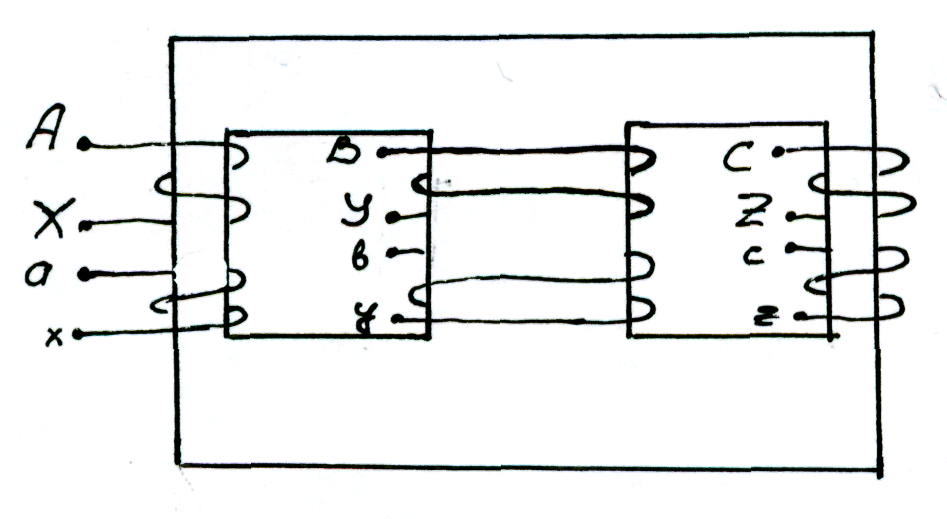
Эти обмотки могут соединятся по схеме звезда и по схеме треугольник. Группа соединения обмоток указывает на то, что угол сдвига фаз между соответствующими первичными и вторичными напряжениями трансформатора равен часовой и минутной стрелкой в часах, при этом вектор линейного напряжения первичной обмотки соединяется с минутной стрелкой.
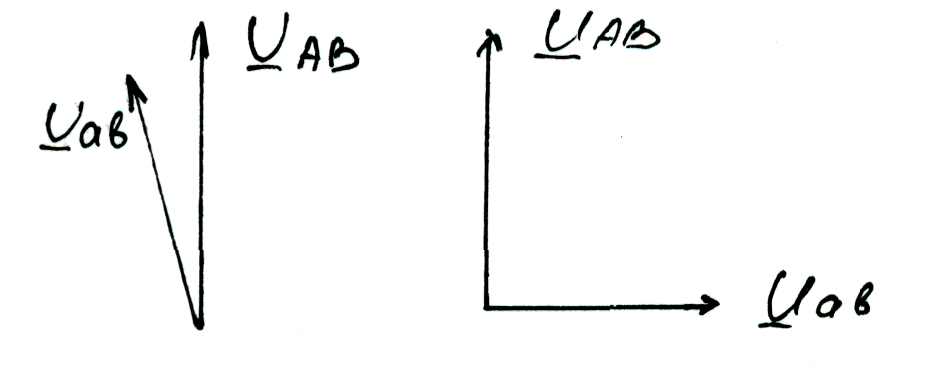
Группу соединения обмоток трехфазного трансформатора важно знать т.к. на параллельную работу можно включить только трансформаторы имеющие одноименную группу. На параллельную работу трансформаторы устанавливают когда Векторная диаграмма трехф-ого трансф-ра в режиме холостого хода на рис.10.13.
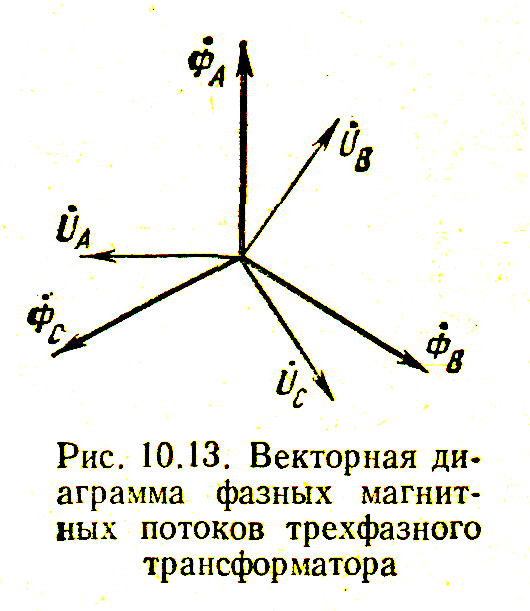
Фазные напряжения питающей сети и фазные ЭДС сдвинуты на угол 120°. Векторы магнитных потоков в трех стержнях образуют симметричную звезду, и сумма их = 0. Поэтому силовой трансф-тор не имеет четвертого замыкающего стержня.
26. Измерительные трансформаторы. В цепях переменного тока часто применяют измерительные трансформаторы напряжения и тока, с помощью которых измеряют большие напряжения и токи с помощью приборов, рассчитанных на измерение небольших значений этих величин. Кроме того, измерительные трансформаторы позволяют изолировать электроизмерительные приборы цепи от высокого напряжения и тем самым обеспечить безопасность работы обслуживающего персонала.
Трансформаторы напряжения служат для подключения вольтметров, катушек напряжения ваттметров, счетчиков, фазометров и реле, рассчитанных на работу со стандартными приборами напряжением 100 В; их выпускают на различные значения первичного напряжения, достигающего десятков киловольт. Трансформаторы тока используют для включения амперметров, токовых катушек ваттметров, счетчиков и т. д., рассчитанных на работу со стандартными приборами на ток 1, 2, 3,5; 5 А.
27. Асинхронные машины. Устройство и принцип работы трехф-го асинхронного двигателя. Асинхр-ая машина— машина переем-го тока, в кот-ой частота вращающего магнит-го поля статора не равна частоте вращающегося ротора. Они как и другие эл. машины работают в обратимом режиме, т.е. могут работать как в режиме двигателя, так и в режиме генератора. Как генер. Асинхр-ые машины уступают синхронным машинам, поэтому основной их режим работы-двигательный режим. Асинхр-ые машины явл. самыми распростр-ми в пром-ти в силу их простоты, надежности и дешевизны. Асинхр. Двигатели бывают одно-2-ух и 3-ехфазными. Устройство 3-ехфазного асинхр-го двигателя. Состоит из 2-ух осн. частей: неподвижного статора и вращающегося ротора. Статор -полый цилиндр набранный из таких листов эл.техн-ой стали, изолиров. друг от друга для уменьшения потерь на гистерезисе или кривые токи. На внутр. пов-ти статора им-ся пазы, в кот. уклад-ся 3-ехфазная обмотка. Обмотка статора —совок-ть 3-ех одинаковых однофазных обмоток (фаз сдвинутых относ-но др. др. на угол 120°). Обмотка соединения по схеме «звезда» и «треуг-к» в завис-ти от питающего напряж. Если есть надпись Υ/ 380/220 – обозн-ет, что при лин-м напряжении =380В обмотки статора соед-ся по схеме Y, а при напр. = 220В по схеме ∆ . Ротор —соединяет сердечник, набранный из неизолированных листов эл.технич-ой стали. На наруж. пов-ти ротора имеются пазы, в кот. размещ. ротериальная обмотка. По конструкции роторной обмотки асинхр-ые двигатели бывают с короткозамкнутым ротором и фазным ротором. Обмотка предст-ет собой совок-ть уложенных в пазы сердечника провод-в из Aℓ, Cu или бронзы. По внешнему виду короткозамкнутая обмотка предст. собой беличью клетку. В асинхр. двигателе с фазным ротором обмотка ротора вып-ся по типу статерной, концы обмотки соед. по схеме Y. Свободн. выводы обмоток присоеденены к 3-ем устан-ам на вал и изолиров. как от вала, так и от сердечника кольцами, по кот. скользят щетки. Асинхр. двиг-ли с фазным двигателем исп-ют в основном в под. кранах. Асинхр. двигат. с короткозамкн. ротором исп-ют в вентил-х, насосах, транспортерах. Принцип д-вия асинхр-го двигателя. Основан на взаимод-вии вращ-ся магн. поля, созд-ого статерной обмоткой, с токами наводимыми этим полем в обмотках ротора. Токи в обмотке = 0 по величине и сдвинуты друг относит-но друга на угол 120°. Можно сказать, что магн. поле в зазоре м/у статером и ротером явл. вращ. магнитным полем. Частота вращ. магн. поля: n1=(60 f1)/p, где n1 –частота статора, f1 – частота питающей сети, р –число пар полюсов. Основная схема включ. асинхр. двигателя: если возникает необ-ть изм-ть напр-ние вращ. ротера, то в этом случае достат-но поменять местами любые 2 фазы.
Статор в виде пост-ого магнита:
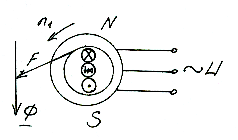
Основной магн. поток Ø направлен от N к S и пересекает проводник обмотки ротера. При этом он наводит ЭДС e2. Направл-е ЭДС опр-ся по правилу правой руки: правую руку расп-ют так, чтобы силовые линии магнит. поля входили в ладонь, тогда большой палец будет направлен по направл. перемещ. проводника (в нашем случае в сторону против-но направл. вращ. магн. поля). 4 пальца укажут направление e 2 (в нашем случае от нас). Если обм. ротора замкнута, то в ее пров-ках возникает ток i2 соноправленный с e2. В рез-те взаимного тока i2 и магн. потока Ø возн-ет сила F и мом. вращения М под действием кот. ротор начинает вращ-ся. Направление силы F опр-ся по правилу левой руки: ладонь левой руки надо распр-ть так, чтобы силовые линии входили в ладонь. 4 вытянутых пальца расположить по направлению тока, тогда большой палец укажет направление силы F. Ротор начинает вращаться с частотой n2 > n1. По мере разгона двигателя e2 уменьш ся, т. к. уменьш-ся разница (n2— n1). n1 –частота вращения статора, n2 –частота вращения ротера. Ток i2 тоже уменьш-ся , вместе с ним уменьш-ся вращ. момент М, частота ротера увелич-ся до тех пор, пока не наступит равновесие м/у вращ. моментом М и мом. сопротивления Мсопр. После этогоротер будет вр-ся с частотой n2 . М=Мсопр; (n1— n2)/ n1 = S, S-скольжение. Если n2=0, то S=1. Если n2= n1, то S=0. Величина скольжения колеблится в пределах 2-7%.
28 Рабочие
характеристики асинхронного двигателя.
Механические характеристики наглядно
показывает свойства асинхронного
двигателя как части электропривода. Но
для более полного выявления свойств
самого двигате5ля служат его рабочие
характеристики – так принято называть
зависимости от полезной мощности Р2 двигателя на валу частоты вращения n,
вращающего момента М, коэффициента
мощности коэффициента cosφ
и КПД  .
Все рабочие характеристики снимаются
при номинальных частоте сети f
и напряжении между выводами статора
U1=U1ном. Вращающий момент складывается из
полезного момента М2 и момента холостого хода Мх М2=Р2/ωр(угловая
скорость двигателя).
.
Все рабочие характеристики снимаются
при номинальных частоте сети f
и напряжении между выводами статора
U1=U1ном. Вращающий момент складывается из
полезного момента М2 и момента холостого хода Мх М2=Р2/ωр(угловая
скорость двигателя).
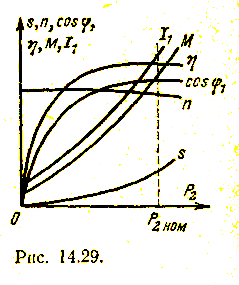
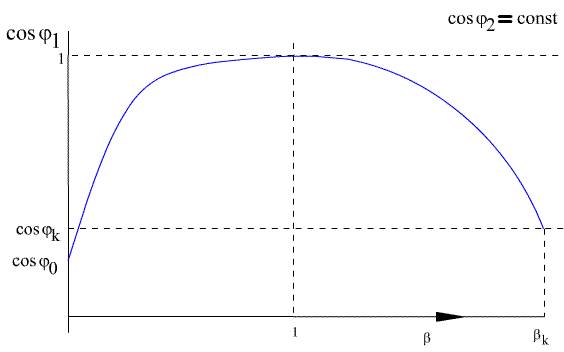
Что касается зависимости cosφ1 двигателя от нагрузки, то его изменения обусловлены следующими соотношениями. Намагничивающий ток двигателя мало зависит от нагрузки, так как ее увеличение вызывает лишь возрастание потокосцеплений рассеяния, пропорциональных токам в обмотках статора и ротора, а главный магнитный поток машины при возрастании нагрузки незначительно уменьшается. Но активный ток двигателя пропорционален его механической нагрузке. Таким образом, с увеличением нагрузки двигателя относительное значение реактивного тока быстро убывает, a cos ф1 увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок — примерно 0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,7—0,9) при нагрузке, близкой к номинальной. Таким образом, даже у полностью загруженного двигателя реактивный ток составляет 70—40 % тока статора.
Неполная загруженность асинхронных двигателей является одной ‘из главных причин низкого cosφ промышленных предприятий. Естественным способом повышения cosφ является полная загрузка асинхронных двигателей. Главный магнитный поток двигателя пропорционален напряжению на статоре. Намагничивающий ток, возбуждающий этот поток, при заданном значении потока обратно пропорционален магнитному сопротивлению на пути потока. В этом магнитном сопротивлении большую часть составляет сопротивление воздушного зазора между статором и ротором. По этой причине конструктор стремится сократить этот зазор до минимума, определяемого условиями подвижности в подшипниках и необходимым запасом на их износ, прогибом вала и точностью центровки. С увеличением номинальной мощности двигателя необходимый воздушный зазор возрастает значительно медленнее этой мощности, благодаря чему с повышением номинальной мощности двигателя его cosφ увеличивается. С уменьшением номинальной частоты вращения двигателя увеличивается его магнитный поток, так как при меньшей частоте вращения он индуктирует в фазной обмотке статора меньшую ЭДС. Следовательно, у тихоходных двигателей намагничивающий ток относительно больше, a cosφ существенно меньше.
Коэффициент полезного действия определяется отношением полезной мощности на валу Р2 к мощности Р1( определяющей потребление двигателем энергии из сети:
Мощность Р1 равна сумме полезной мощности и мощности всех потерь в двигателе:
Мощность всех потерь энергии в двигателе можно разделить на постоянную составляющую, практически не зависящую от нагрузки, и переменную составляющую, зависящую от нее.
Мощностью постоянных потерь энергии в двигателе можно считать мощность потерь в сердечнике статора на гистерезис и вихревые токи и мощность механических потерь, которая определяется экспериментально из опыта холостого хода двигателя.
Мощностью переменных потерь энергии в двигателе является мощность потерь на нагревание проводников обмоток статора и ротора, она равна:

Своего максимального значения (65—95 %) КПД достигает, когда переменные потери равны постоянным (см. § 8.9). У большинства двигателей этот максимум КПД имеет место примерно при нагрузке, равной 75 % номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.
29.Схемы замещения фазы асинхр-го двигателя. По аналогии с трансф-ом можно составить Т-образную и Г-образную схемы замещения.
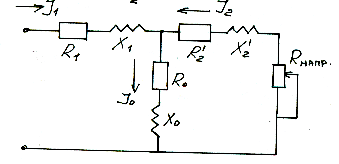
Rн=((1-S)/S)R`2. R1-акт. сопр. обмотки статора; Х1-индуктивное сопр-ние обмотки статора; R`2 –привед. акт. сопрот. обмотки ротера; Х`2-прив. индукт. сопр. обмотки ротера; R0,X0-акт. и индукт. сопротивл. статора в режиме хол-го хода. ((1-S)/S)R`2-акт. сопр., имитир-щее механич-ую нагрузку на валу двигателя.
Rk=R1+R`2 Xk=X1+X`2 , Rk, Xk- опред-ся из опыта короткого замыкания.
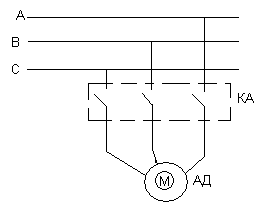
30 Способы пуска асинхронного двигателя с короткозамкнутым ротером.Пусковые двигатели тем лучше , чем больше пусковой момент и меньше пусковой ток. Mпуск и I пуск
1 сп-б пуска: Прямой пуск двигателя.
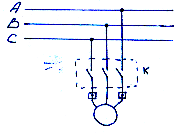
К-ключ (магнитный пускатель)
Iпуск=(5 до 7)Iном Кпуск=Iпуск/Iном=5 до7 Достоинство
:1-двиг-ль развивает наибольший пусковой момент 2-простота схемы
пуска двиг-ля . Недостатки: 1- Пусковой ток превышает номинальное
зн-ие в 5-7 раз.
2 сп-б пуска: Пуск через мунтирующий реакторы.
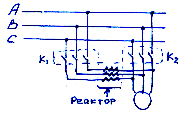
Последовательность пуска-1- сраб-т клюя К1, в следствии этого напряж. Поступает на статор обмотки через катушку реактора. Часть падения напряж-я (фазного напр-я) происх-т на этих катушках. Uпуск падает стремится к раз падает Iпуск. 2-при наборе ротером в двигателе номин-х оборотов ключ К1 отключ-я и включ-я К2. в этом случае статорные обмотки двиг-ля будут включены в сеть непосредственно. Дост-во-ток пусковой уменьш-я в К раз, нед-к-момент пуск. Уменьщ-я вК квадрат раз.3- включение двиг-ля через понижающий автотрансформатор. Дост-ва и нед-ки аналог-ы второму.4- пуск с переключением статерной обмотки двиг-ля с перекл-ем со сх. Треугольник на сх. Звезда .
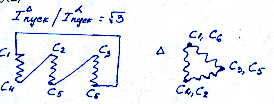
практ-и все обмотки двиг-й изгот-ся
на номин-м напряжении 220 В, поэт.
Если Uл=220В, то
Uф=220/корень 3=127В
отнош-ие пуск-го тока Iпуск треуг./ Iпуск звезда
=корень3
Пуск асинхронного двигателя с фазным ротером. Двигатель с фазным ротером обладает улучшенными пусковыми свойствами. Их включ-е осущ-ся подключ-и и ротером обм-м пуск-го реостата.
Sкр=R12+ R1п.р/Xк=1 (1) R12— активное сопрот-е обм-и ротера
R1п.р-сопр.пуск.реастата пересчит-е на статор-ю обмотку.
Xк=X1+X12—сумма инд-х сопрот. стат-й и рот-й обмоток .
При выпонении усл.(1) мом.
Мпуск=М max по мере
Разгона двиг-ля пуск.р.
плавно выв-ся и двиг-ль
будет работать по усл.(1).
Асинхронный двигатель с улучшенными пусковыми свойствами .
Прямой пуск является основным способом пуска асинхронных двигателей. При прямом пуске на статорную обмотку двигателя подается полное напряжение сети.
Достоинство: простота осуществления, двигатель развивает наибольший пусковой момент по сравнению с другими способами пуска. Недостаток: большая кратность пускового тока KI=Iпуск/Iном=5-7 Iпуск=Uф/Z к Большой пусковой ток неопасен для самого двигателя, но он может вызвать значительное понижение напряжения в сети, питающей двигатель, особенно если есть маломощная. Значительное снижение напряжения в сети может в свою очередь вызвать остановку уже работающих двигателей, питаемых от этой же сети. В свою очередь это приводит к еще большему возростанию потребляемого из сети тока и дополнительному понижению напряжения в сети, что приводит к невозможности пуска двигателя; для ограничения пусковых токов применяют специальные способы пуска.
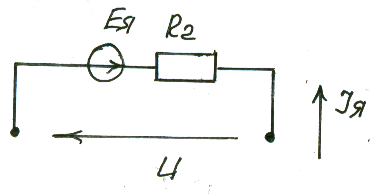
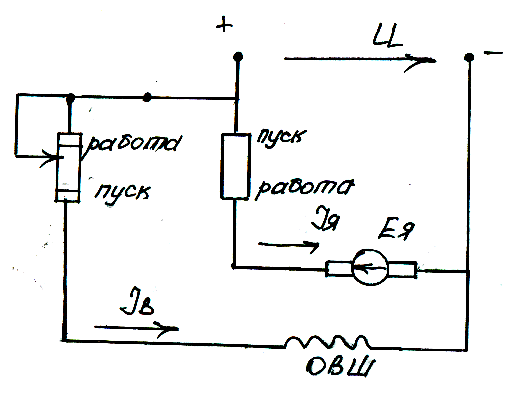
31 Синхронные машины. Принцип действия синхронного генератора. Она обладает ценным свойством: она может работать с током, определим по фазе напряжения φ<0. В отличие от них асинхронные двигатели работают с током, отстающим по фазе от напряжения. Это позволяет при совместном испытании синхронных и асинхронных машин получать высокий коэффициент мощности без использования дополнительных компенсаторов. Это свойство синхронных машин позволяет использовать их в качестве двигателей для привода механизмов с постоянной угловой скоростью. Распространенность синхронных двигателей не столь широка, как асинхронных, но в ряде случаев, например в металлургии, их использование становится необходимым. Принцип действия: Для обеспечения генераторного режима нужно: 1) ротор привести во вращение (турбина паровал, гидравлическая, дизельный двигатель) 2)Обмотку возбуждения зажигать постоянным током. Постоянный ток протекая по обмоткам возбуждения создает магнитный поток Ф0 который вращался вместе с ротором наводит в обмотках статора синусоидального ЭДС с частотой f f=(Pn)/60 P-число пар полюсов, n- частота вращения ротрора[об/мин}. Т.к фазные обмоткис двинуты относительно друг друга на угол 2π/3p или 120/p, то наводимое в фазах статорной обмотки потоком Ф0 сдвинуто на угол 1200. Часть машины, в которых наводится ЭДС, называется якорем. Если к якорю не подключена нагрузка, то генератор работает в режиме холостого хода. При работе якоря под нагрузкой создается поток рассеивания. Ф0, сцепленный только с якорем. Поток рассеивания описывается индуктивным сопротивлением Хря. Потоку Фσ соответствует индуктивное сопротивление Хσ. Сумма этих сопротивлений называется синхронным индуктивным сопротивлением. Хря+Хσ=Хсинхр. Покажем схему
замещения фазы якорной обмотки
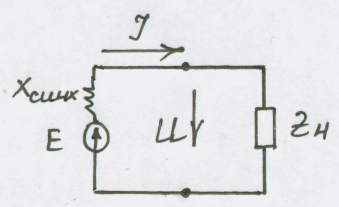
U=jXсинхрI=E U=E—jXсинхрI—уравнения фазы статорной обмотки.
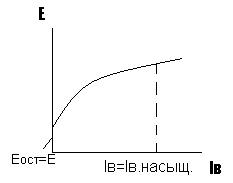
32) Характеристики синхронного генератора, работающего на автономную нагрузку. 1)Характеристики холостого хода – это зависимость ЭДС генератора от тока возбуждения при холостом ходе.
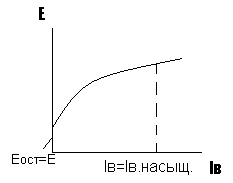 E=f
(Iвозб)
Если ток = 0, то n=const
(Iвозб=0)при
увеличений и возбуждений ЭДС увеличивается,
однако при некотором тока возбуждения
рост ЭДС прекращается, что связано с
насыщением магнитной цепи машины.
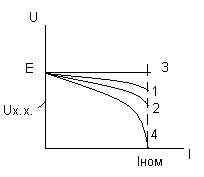
2)Внешняя
характеристика-это
зависимость напряжения на зажимах
синхронного генератора от тока нагрузки
U=f(I),
Iв=I.вном=const
вид внешней характеристики зависит от
характера внешней нагрузки. Напряжение
на зажимах генератора с ростом тока
нагрузки изменяется по двум причинам.1.
Увеличивается падение напряжения на
синхронном индуктивном сопротивлении,
2. вследствие реакции якоря (воздействия
магнитного потока якоря на магнитный
поток ротора).
E=f
(Iвозб)
Если ток = 0, то n=const
(Iвозб=0)при
увеличений и возбуждений ЭДС увеличивается,
однако при некотором тока возбуждения
рост ЭДС прекращается, что связано с
насыщением магнитной цепи машины.
2)Внешняя
характеристика-это
зависимость напряжения на зажимах
синхронного генератора от тока нагрузки
U=f(I),
Iв=I.вном=const
вид внешней характеристики зависит от
характера внешней нагрузки. Напряжение
на зажимах генератора с ростом тока
нагрузки изменяется по двум причинам.1.
Увеличивается падение напряжения на
синхронном индуктивном сопротивлении,
2. вследствие реакции якоря (воздействия
магнитного потока якоря на магнитный
поток ротора).
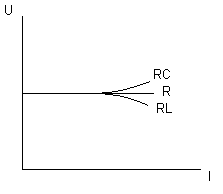 RC-активная
емкостная нагрузка, R-активная
нагрузка, RL-активная
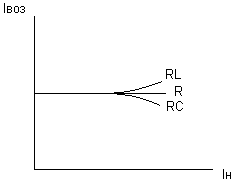
индуктивная нагрузка. 3)регулировочная
характеристика –
это зависимость тока возбуждения от
тока нагрузки: Iвозб=f(Iном
), при U=Uном=const
n=nном=const,
cos
φнагр=const.
Вид регулировочной характеристики
зависит также от характера нагрузки и
является обратным по отношению к внешней
характеристике, то есть эта характеристика
показывает как нужно изменять ток
возбуждения с увеличением тока нагрузки,
чтобы напряжение на зажимах генератора
оставались величиной постоянной.
RC-активная
емкостная нагрузка, R-активная
нагрузка, RL-активная
индуктивная нагрузка. 3)регулировочная
характеристика –
это зависимость тока возбуждения от
тока нагрузки: Iвозб=f(Iном
), при U=Uном=const
n=nном=const,
cos
φнагр=const.
Вид регулировочной характеристики
зависит также от характера нагрузки и
является обратным по отношению к внешней
характеристике, то есть эта характеристика
показывает как нужно изменять ток
возбуждения с увеличением тока нагрузки,
чтобы напряжение на зажимах генератора
оставались величиной постоянной.
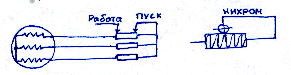
33 Принцип действия и устройство синхронного двигателя. Синхронная машина обладает ценным свойством: она может работать с током, определим по фазе напряжения φ<0. В отличие от них асинхронные двигатели работают с током, отстающим по фазе от напряжения. Это позволяет при совместном испытании синхронных и асинхронных машин получать высокий коэффициент мощности без использования дополнительных компенсаторов. Это свойство синхронных машин позволяет использовать их в качестве двигателей для привода механизмов с постоянной угловой скоростью. Распространенность синхронных двигателей не столь широка, как асинхронных, но в ряде случаев, например в металлургии, их использование становится необходимым. Синхронные машины обладают ценным свойством. Они могут работать с током, опережающим по фазе напряжение. Это позволяет при совместном испытании синхронных и асинхронных машин получать высокие коэффициенты мощности и без применения дополнительных конденсаторов. Устройство: состоит из статора-полого цилиндра, набранного из тонких листов электротехнической стали, изолированных друг от друга для уменьшения потерь на гистерезис или кривые токи. На внешней поверхности статора имеются паузы, в которые укладывается трехфазная обмотка. Обмотка статора.-совокупность трех одинаковых однофазных обмоток. Ротор состоит из электромагнита постоянного тока, изготовленного из электротехнической стали и обмотки возбуждения, концы которой присоединены к контактным кольцам, которым прижимаются неподвижные щетки. С помощью этих щеток и колец обмотка возбуждения запитывается от источника постоянного тока. Это может быть генератор постоянного тока установленный на валу синхронной машины такой генератор называется возбудителем.
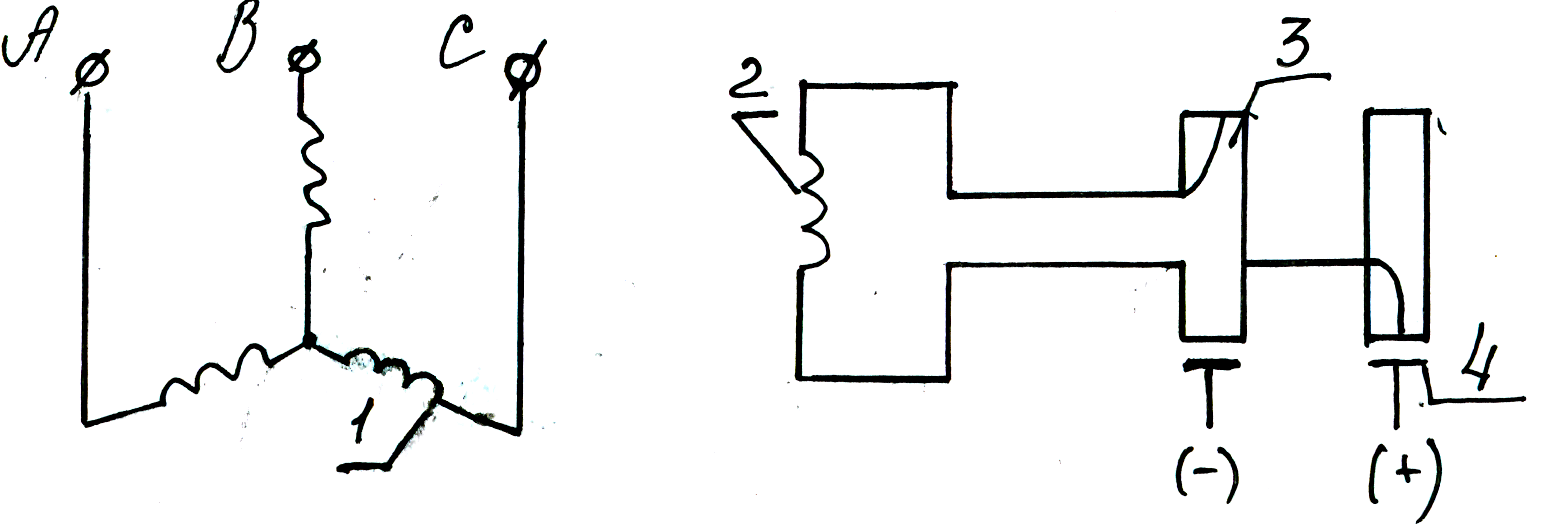
1-обмотка статора, 2- обмотка возбуждения, 3-контактные кольца, 4-щетки, по конструкции ротора различают синхронные машины (СМ) с явно выраженными полюсами то есть с выступающими полюсами (тихоходные СМ) n=80-250 об/мин, и с неявно выраженными полюсами, т.е. цилиндрической формы (быстроходные СМ) n=1500-3000 об/мин. Принцип действия. Чтобы обеспечить двигательный режим СМ надо: 1-статорную обмотку подключить к трехфазной цепи, 2-обмотку возбуждения запитать постоянным током. В этом случае на ротор будет действовать знакопеременный момент и ротор в силу своей инерциальности вращаться не будет, а будет только вибрировать на месте, поэтому для пуска СД необходимо предварительно раскрутить ротор до скорости близкой к синхронной. Это делается либо с помощью постороннего двигателя, либо с помощью специальной пусковой, короткозамкнутой обмотки, как у АД-это называется асинхронный пуск синхронной машины. Порядок пуска: 1) Обмотка возбуждения замыкает через сопротивление, чтобы уменьшить напряжение между витками и избежать пробои изоляции. 2) Подают питание на короткозамкнутую обмотку и раскручивают ротор до скорости, близкой к синхронной. 3) В обмотку ротора подается постоянный ток и он “догоняет” магнитное поле статора и втягивается в синхронизм. После этого короткозамкнутая обмотка отключается.
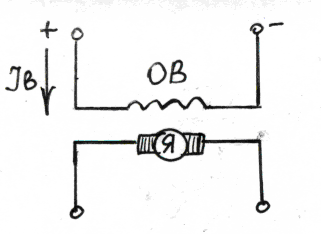
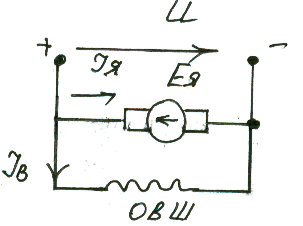
34Устройство машины постоянного тока. Принцип работы генератора постоянного тока, способы его возбуждения. Состоит из неподвижной части статора и подвижной – якоря. Статор – стальная станина, внутри которой закреплены главные полюса, на которых расположены обмотки возбуждения. Обмотка возбуждения запитывается постоянным током и создается основной магнитный поток. Якорь состоит из электромагнитной стали и закрепляется на валу двигателя. В пазах якоря размещена обмотка каждая секция которой соединена с коллекторной пластиной. Коллектор – цилиндр из медной пластины специальной формы, коллектор скользит по неподвижным пластинам (щетки). Они образуют механический выпрямитель. Коллектор преобразует постоянный ток источника, переменный ток якоря, для уменьшения искрения. Между главными полюсами установлены дополнительные полюса. Принцип действия генератора постоянного тока. Якорь вращается при помощи внешней силы, обмотка возбуждений запитывается постоянным током, проводники якоря пересекают магнитный поток главных полюсов, а в них наводится ЭДС. С коллектора снимается ЭДС: E=CenФ, Ce-коэффициент, зависящий от конструкции обмотки, n-частота вращения якоря, Ф-магнитный поток главных полюсов. На проводники якоря действует электормагнитная сила, направленная против его движения и создающая тормозной электромагнитный момент. Мт=СмФIя, См-постоянная величина, зависящая от момента, Iя-ток якоря. Способы возбуждения генератора постоянного тока (ГПТ). Виды: 1. Генераторы с независимым возбуждением(ОВ питается от независимого источника постоянного тока).
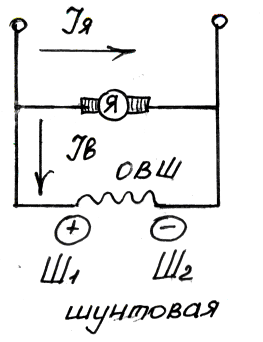
2. Генератор с самовозбуждением: а)генератор с параллельным возбуждением,
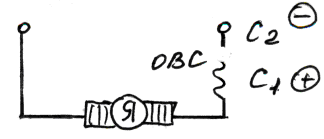
б) генератор с последовательным возбуждением,
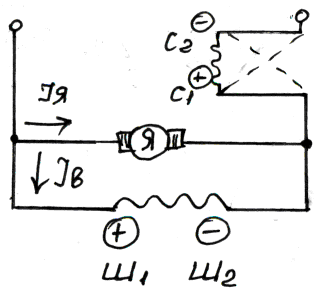
в) генератор со смешанным возбуждением: а-согласно включению обмоток, б-пунктир встречный включению обмоток.
Принцип самовозбуждения ГПТ (на примере генератора параллельного возбуждения). Генератор параллельного возбуждения. Характеристики ГПТ. При заводских испытаниях главные полюса машины намагничиваются и в них сохраняется небольшой остаточный магнитный поток Фост. При вращении якоря его проводники пересекают этот поток и в них наводится небольшая ЭДС Ея=СеnФост, т.к обмотка возбуждения подключено параллельно якорю, то под действием этой ЭДС в ней потечет ток возб.Iвозб. Этот ток создает магнитный поток обмотки возбуждения Фов, кот-ая сложится с Фост и. увеличит основной магнитный поток главных полюсов Фост.+Фов=Ф, это в свою очередь увеличит ЭДС якоря. Ея=СеnФ и следовательно увеличит ток возбуждения. Т.о. генератор сам себя намагничивает. В следствии насыщения главных полюсов машины этот процесс прекратится при определенном значении ЭДС.
35 Характеристики генератора постоянного тока. 1)характеристики холостого хода – это зависимость ЭДС якоря от тока возбуждения при х.х. E=f(Iв) I=0 n=nном=const вид этой характеристики напоминает форму кривой намагничивания магнитной цепи ГПТ.
2)внешняя характеристика – зависимость напряжения на зажимах генератора от тока нагрузки U=f(I) n=nном=const Rрсост=const [Iв=const]

Вид внешней характеристики зависит от способа возбуждения. Уравнение электрической постоянной цепи якоря ГПТ U=E-RяIя 1 -внешняя характеристика ГПТ независимого возбуждения с ростом тока якоря из формулы напряжение уменьшается на величину падения напряжения в цепи якоря (RяIя) Характеристика жесткая, т.к снижение напряжения при номинальном токе составляет лишь 5-7%.2- внешняя характеристика ГПТ параллельного возбуждения проходит ниже, чем 1, т.к при снижении напряжения U уменьшается и ток возбуждения, что приводит к дополнительному снижению осн. магн. потока Ф, а следовательно к снижению ЭДС якоря и к снижению напряжения. 3-внешняя характеристика ГПТ смешанного возбуждения при согласном включении параллельной и последовательной обмоток. Напряжение практически неизменно т.к. падение напряжение в цепи якоря компенсируется ростом ЭДС на такую же величину. 4- внешняя характеристика ГПТ смешанного возбуждения при встречном включении последовательной и параллельной обмоток. Напряжение на генераторе резко падает с ростом тока нагрузки.3) Регулировочная характеристика –это зависимость тока возбуждения от тока нагрузки Iв=f(I), U=Uном=const, n=nном=const. Вид этой характеристики обратной по отношению к внешней характеристике, т.е. она показывает как надо менять ток возбуждения, чтобы напряжение на зажимах генератора поддерживать неизменным.
36.Двигатель постоянного тока. ДПТ параллельного возбуждения. 1)Преимущества: возможность плавного регулирования частоты вращения 2)Большой пусковой момент. Недостатки 1) Наличие щеточно–коллекторного узла (требует постоянного ухода) 2) сложность конструкции. Принцип работы.

Постоянный ток подводится к обмоткам якоря и обмоткам возбуждения. По проводам якоря протекает ток. Под действием электромагнитного поля Фв провода якоря наводится ЭДС, по ним течет ток якоря и за счет этого возникает электромагнитный момент и якорь начинает вращаться. Схема замещения якорной обмотки в режиме двигателя.
Электрической обмотки. U=Eя+IяRя — уравнение электрического состояния якорной обмотки. Двигатель постоянного тока параллельного возбуждения.
U=E+IяRя
(1) Iя=
(U-
E)/
Rя
(2) Е=СеnФ
(3)  при n=0
следовательно Iя=U/Rя,
т.е. при пуске против ЭДС=0. Пусковой ток
в 10-30 раз превышает ток, что опасно для
двигателя, поэтому его ограничивают
пусковым реостатом.
при n=0
следовательно Iя=U/Rя,
т.е. при пуске против ЭДС=0. Пусковой ток
в 10-30 раз превышает ток, что опасно для
двигателя, поэтому его ограничивают
пусковым реостатом.
Сопротивление регулировочного реостата выбирают из условии: Iя=U/(Rя+Rpp)
Одновременно необходимо увеличивать пусковой момент: М=СмФIяпуск, для этого увеличивают магнитный поток Ф, уменьшая сопротивление пускового реостата, задействованного в обмотку возбуждения. Регулирование частоты вращения двигателя постоянного тока с параллельным возбуждением n=(U-IяRя)/(CeФ) 1) увеличением сопротивления якоря, тем меньше n. 2)применением магнитного потока.
§5. Приведенный трансформатор.
В общем случае параметры первичной
обмотки трансформатора отличаются от
параметров вторичной обмотки. Особенно
это ощутимо при больших коэффициентах
трансформации, что затрудняет расчеты
и особенно построения векторных диаграмм,
т.к. векторы этих величин W1значительно отличаются от векторов
одноименных величинW2.
Это устраняется приведением всех
параметров трансформатора к одинаковому
числу витков (обычно кW1).
Таким образом, вместо реального
трансформатора сk=W1/W2мы получаем эквивалентный сk=W1/ =1, где
=1, где =W1.
=W1.
Но все параметры должны оставаться такими же, как и в реальном. Например, электромагнитная мощность вторичной обмотки реального трансформатора E2I2должна быть равной электромагнитной мощности вторичной обмотки приведенного трансформатора, т.е.
E2I2=
Подставим  =I2
=I2 и получим приведенную вторичную э.д.с.
и получим приведенную вторичную э.д.с.
т.к.  .
.
Из условия равенства потерь в активном сопротивлении вторичной обмотки трансформатора имеем
Приведенное активное сопротивление

Приведенное индуктивное сопротивление рассеяния вторичной обмотки определяется из условия равенства реактивных мощностей
откуда
Приведенное полное сопротивление вторичной обмотки трансформатора
Полное приведенное сопротивление нагрузки
Уравнения э.д.с. и токов для приведенного трансформатора имеют вид
Эквивалентная схема приведенного трансформатора имеет вид

Схема замещения – «Т»образная

Построим векторную диаграмму при активно-индуктивной нагрузке.

При активно-емкостной нагрузке  будет опережать вектор
будет опережать вектор .
.
§6. Переходные процессы в трансформаторах.
До сего времени рассматривалась работа трансформатора в установившемся режиме, когда значения токов, напряжений, э.д.с. и магнитных потоков остаются длительное время неизменными.
При переходе трансформатора из одного установившегося режима к другому возникают переходные процессы. Т.к. каждый установившийся режим характеризуется определенным значением энергии электромагнитных полей, то в течение переходного процесса происходит изменение энергии этих полей. Это сопровождается возникновением в магнитопроводе трансформатора магнитного потока переходного процесса, а в обмотках – появлением бросков тока перенапряжений.
Наибольший практический интерес представляют переходные процессы при включении трансформатора и при коротком замыкании на зажимах вторичной обмотки.
6.1. При включении трансформатора в сеть результирующий поток можно рассматривать как
Ф=Фуст+Фпер+Фост,
где Фуст– магнитный поток установившийся;
Фпер— магнитный поток переходного процесса;
Фост— магнитный поток остаточного магнетизма, который может быть направлен согласно с установившимся потоком (+) и встречно (-).
Магнитный поток переходного процесса является затухающим и постоянным по направлению. Наиболее благоприятный случай включения трансформатора в сеть будет при потоке остаточного магнетизма, направленном встречно установившемуся потоку, и при мгновенном значении первичного напряжения U1=0. При этом магнитный поток установившийся Фустбудет максимальным, т.к. он отстает по фазе от напряжения на угол ≈ 90°.

Магнитный поток Ф достигает наибольшего значения приблизительно через половину периода после включения трансформатора. Если магнитопровод трансформатора ненасыщен, то в момент включения трансформатора в первичной обмотке появится намагничивающий ток, пропорциональный магнитному потоку. Если же магнитопровод насыщен, то при включении трансформатора намагничивающий ток включения достигает более значительного броска.

Из построений, сделанных на кривой намагничивания видно, что при магнитном потоке, превышающем в 2 раза установившееся значение Ф=2 Фуст, намагничивающий ток включения достигает величины во много раз превышающей установившееся значение тока холостого хода (I1вкл>>I0p).
При наиболее неблагоприятных условиях ток включения может в 6-8 раз превысить номинальное значение первичного тока. Т.к. длительность переходного процесса невелика и не превосходит нескольких периодов, то ток включения не представляет опасности для трансформатора. Но этот ток следует учитывать при регулировке аппаратов защиты (чтобы не отключила). Следует учитывать для чувствительных измерительных приборов в цепи (первичной) – надо шунтировать их токовые обмотки до включения трансформатора в сеть.
6.2. Внезапное короткое замыкание на зажимах вторичной обмотки трансформаторавозникает из-за различных неисправностей: мех. повреждения изоляции или ее электрического пробоя при перенапряжениях, ошибочных действий обслуживающего персонала. Короткое замыкание – аварийный режим и может привести к разрушению трансформатора. При внезапном коротком замыкании в трансформаторе возникает переходный процесс, который сопровождается возникновением большого мгновенного тока короткого замыканияiк. Этот ток можно рассматривать как результирующий двух токов: установившегося тока короткого замыканияiкустпостоянного по направлению и тока переходного процессаiкперпостоянного по направлению, но убывающего по экспоненциальному закону
iк=iкуст+iкпер
Наиболее благоприятные условия короткого замыкания могут быть в момент, когда мгновенное значение первичного напряжения равно нулю (U1=0).

Ток внезапного короткого замыкания (ударный ток) может достигать двойного значения установившегося тока короткого замыкания и в 20-40 раз превышать номинальное значение тока.
Переходный процесс при внезапном коротком замыкании у трансформаторов малой мощности длится не более одного периода, а у трансформаторов большой мощности – 6-7 периодов. Затем трансформатор переходит в режим установившегося короткого замыкания, при котором в обмотках протекают токи iкуст, величина которых хотя и меньше токаiкпри переходном процессе, но все же во много раз превышает номинальное значение. Через несколько секунд срабатывают защитные устройства, отключающие трансформатор от сети. Но, несмотря на кратковременность процесса короткого замыкания, он представляет значительную опасность для обмоток трансформатора: резко увеличивает электромагнитные силы в обмотках.
F=Bi,
где F– удельная электромагнитная сила, Н/м.
Но с увеличением тока повышается В. Поэтому
F↑=i2.
Приведенный трансформатор
Приведение трансформатора к одной из его обмоток нужно для того, чтобы можно было построить схему замещения. Для облегчения расчета заменяем магнитные связи электрическими. Приведение можно осуществить к одной из обмоток. Направление приведения решается определением класса задач, решаемых с помощью схемы замещения. Для того, чтобы заменить магнитные связи гальваническими, нужно, чтобы коэффициент трансформации был равен 1. При всех приведениях должно что-то оставаться неизменным. Должна сохраняться неизменной мощность. Наиболее употребительна Т-образная схема замещения. Рис.104. (штрихи обозначают, что трансформатор приведен к первичной обмотке).
Если  , то
, то 
Если мощность сохраняется, то



Переход от начального
трансформатора к приведенному не меняет
начальных фаз. Сохранение фаз во вторичных
обмотках объясняется тем, что комплексы  и
и  связаны
kT,
который является вещественным числом.
Если мы приводим вторичную обмотку к
первичной и мощность сохраняется, то
все то, что подключено ко вторичной
обмотке, должно тоже быть приведено к
первичной.
связаны
kT,
который является вещественным числом.
Если мы приводим вторичную обмотку к
первичной и мощность сохраняется, то
все то, что подключено ко вторичной
обмотке, должно тоже быть приведено к
первичной.

Т.к. параметры холостого хода и короткого замыкания являются каталожными данными схему замещения можно рассчитать. Для трехфазного трансформатора схема замещения рассчитывается для одной фазы.
КПД трансформатора
( ,
,  ,
предположим, что
,
предположим, что  ,
,  ).
).
Рис.105

Максимальный КПД и номинальный отличаются друг от друга незначительно. Оптимальный коэффициент загрузки: опт=0,50,65, для трансформаторов малой мощности: опт=0,61.
Работа трансформаторов под нагрузкой.
Характеристики трансформатора существенно зависят от характера нагрузки (активная нагрузка). Для трансформаторов средней и малой мощности преобладает индуктивное сопротивление. Разное соотношение r и x приводит к тому, что для трансформаторов средней и большой мощности наибольшее падение напряжения при индуктивной нагрузке. Если считать трансформатор источником нелинейной ЭДС с переменным током, то при нагрузке на эквивалентном сопротивлении будет падение напряжения. Для трансформаторов наиболее сильное падение напряжение будет при индуктивной нагрузке. Для трансформаторов малой мощности максимальное падение напряжения будет при активной нагрузке.
Активное сопротивление.
Рис. 106
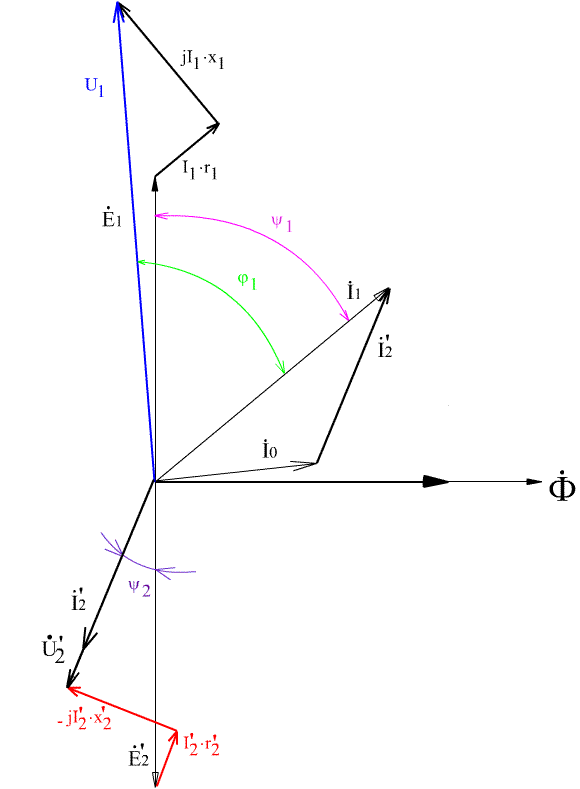
Построение векторной
диаграммы начинается с вектора магнитного
потока. Вектор ЭДС строим перпендикулярно
вектору потока.  ,
т.к. трансформатор приведенный.
,
т.к. трансформатор приведенный.  отклоняется
от
отклоняется
от  на
180
из-за удобства построения.
на
180
из-за удобства построения.  совпадает
с
совпадает
с  ,
т.к. трансформатор приведенный, но не с
,
т.к. трансформатор приведенный, но не с  ,
т.к. есть падение напряжения.
,
т.к. есть падение напряжения.

Векторная диаграмма имеет качественный характер, размеры с реальными не совпадают.
Рис.107
Характеристика
начнется из точки холостого хода ( ),
характеристика закончится, где
),
характеристика закончится, где 
Если нагрузка
активная: ток  увеличивается, ток
увеличивается, ток  приближается
к вектору
приближается
к вектору  ,
,  падает.
За точкой
падает.
За точкой  график не выйдет. Увеличение
график не выйдет. Увеличение  приводит к удлинению векторов,
соответственно, к увеличению
приводит к удлинению векторов,
соответственно, к увеличению  .
Т.к.
.
Т.к.  и
и  растет в отрицательном направлении (по
часовой стрелке), то
растет в отрицательном направлении (по
часовой стрелке), то  удаляется от
удаляется от 
 растет
растет
 падает.
Реально
падает.
Реально  зафиксирован, все вектора «крутятся»
вокруг него, включая и вектор потока.
зафиксирован, все вектора «крутятся»
вокруг него, включая и вектор потока.
Индуктивная нагрузка.
Рис.108
Если нагрузка
индуктивная:  будет больше, чем при активной нагрузке,
но никогда не будет равным 90
(т.к. есть активная составляющая). Вектор
будет больше, чем при активной нагрузке,
но никогда не будет равным 90
(т.к. есть активная составляющая). Вектор  стал намного меньше, вектор
стал намного меньше, вектор  стал длиннее, чем при активной нагрузке.
стал длиннее, чем при активной нагрузке.  стало больше. Чтобы сравнить две
диаграммы, нужно зафиксировать вектор
U1,
тогда диаграмма поворачивается, а
остальные вектора уменьшаются (вектор
U2 уменьшается), вектор E2 уменьшается
уменьшается магнитный поток, получаем
некую аналогию с реакцией якоря. При
индуктивной нагрузке реакция якоря
сильнее, чем при активной и она
размагничивающая.
стало больше. Чтобы сравнить две
диаграммы, нужно зафиксировать вектор
U1,
тогда диаграмма поворачивается, а
остальные вектора уменьшаются (вектор
U2 уменьшается), вектор E2 уменьшается
уменьшается магнитный поток, получаем
некую аналогию с реакцией якоря. При
индуктивной нагрузке реакция якоря
сильнее, чем при активной и она
размагничивающая.
Емкостная нагрузка
Рис. 109
Вектор  короче, чем в предыдущем случае. Для
приведения векторной диаграммы в
нормальный вид нужно изменить масштаб
так, чтобы
короче, чем в предыдущем случае. Для
приведения векторной диаграммы в
нормальный вид нужно изменить масштаб
так, чтобы  стал таким же, как был
приведет к увеличению
стал таким же, как был
приведет к увеличению  ,
,  и вектора магнитного потока. Вектор
тока
и вектора магнитного потока. Вектор
тока  существенно меньше, чем в предыдущих
случаях. В случае емкостной нагрузки
имеем некоторую аналогию намагничивающей
реакции якоря. На вторичной обмотке:
существенно меньше, чем в предыдущих
случаях. В случае емкостной нагрузки
имеем некоторую аналогию намагничивающей
реакции якоря. На вторичной обмотке:  больше, чем
больше, чем  .
Фактическое изменение вектора напряжения
.
Фактическое изменение вектора напряжения  в зависимости от нагрузки отражается
на внешней характеристике трансформатора. Рис.110.
в зависимости от нагрузки отражается
на внешней характеристике трансформатора. Рис.110.
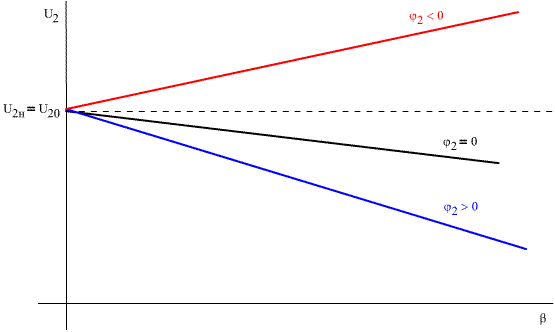

Справедливо для до 1,2.
Рис.111
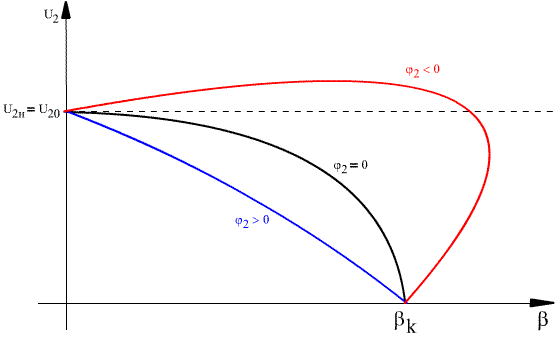
Полная внешняя нагрузка абсолютно нелинейная. При емкостной нагрузке ток может быть больше, чем ток к.з.