устройство, принцип работы, режимы работы, пуск
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Устройство
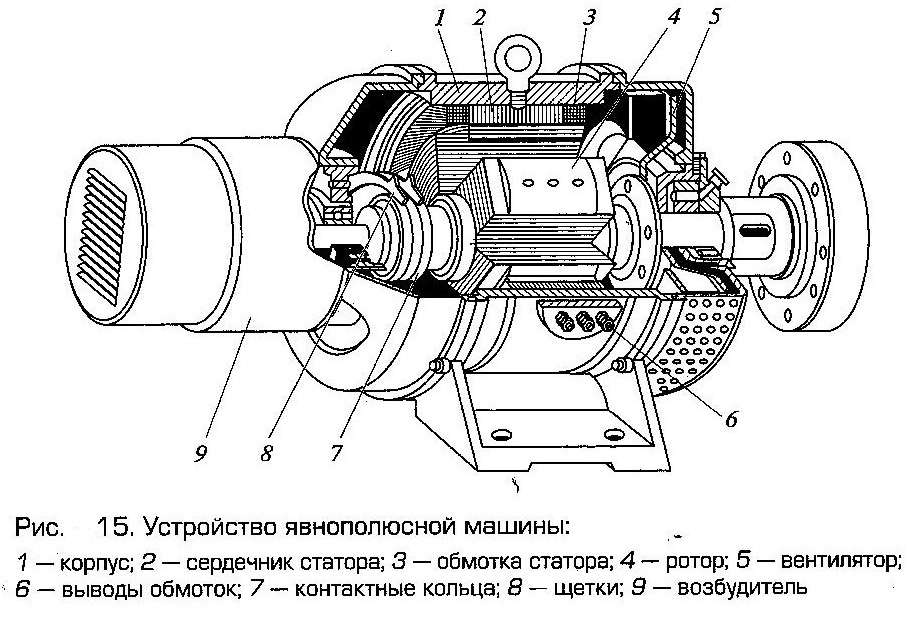
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя
1. Устройство синхронного электродвигателя
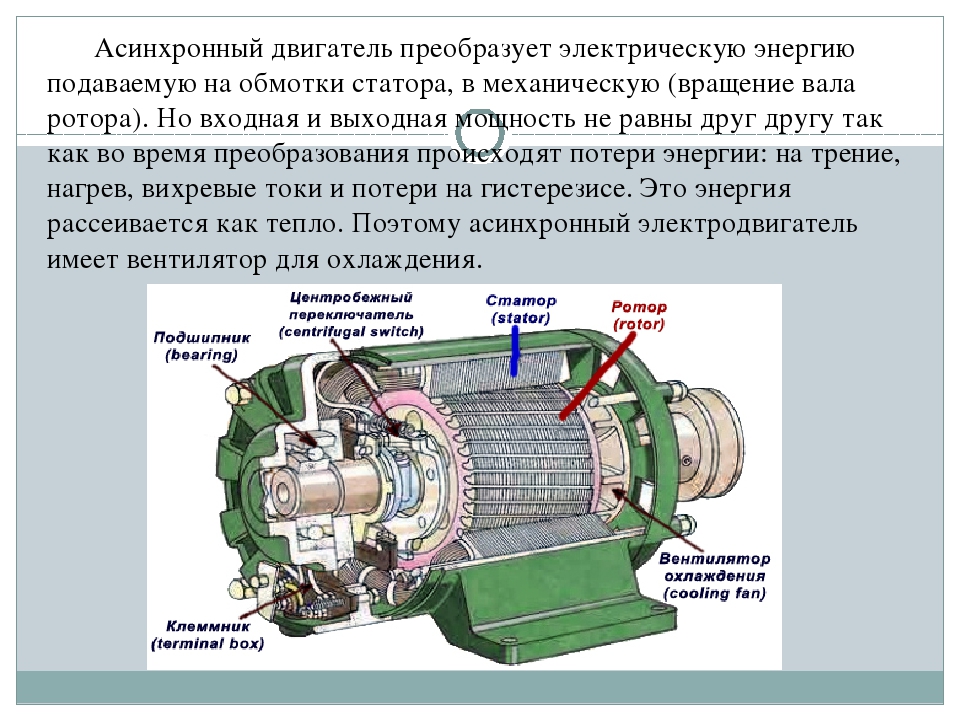
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке.
 В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы. - Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
 В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.Принцип работы
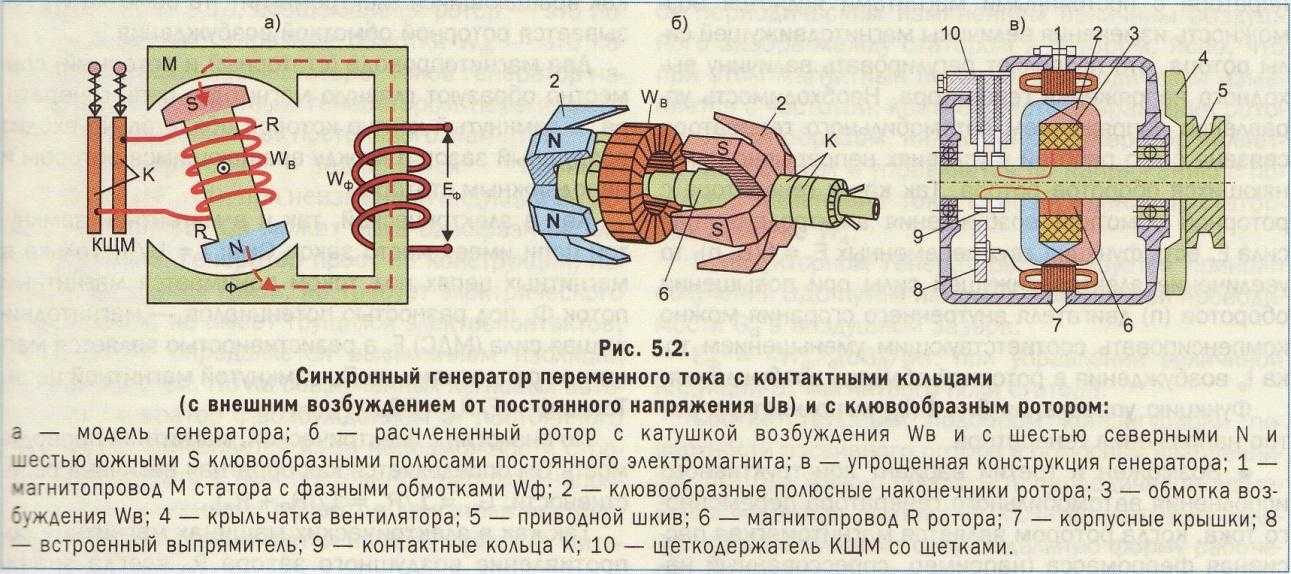
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
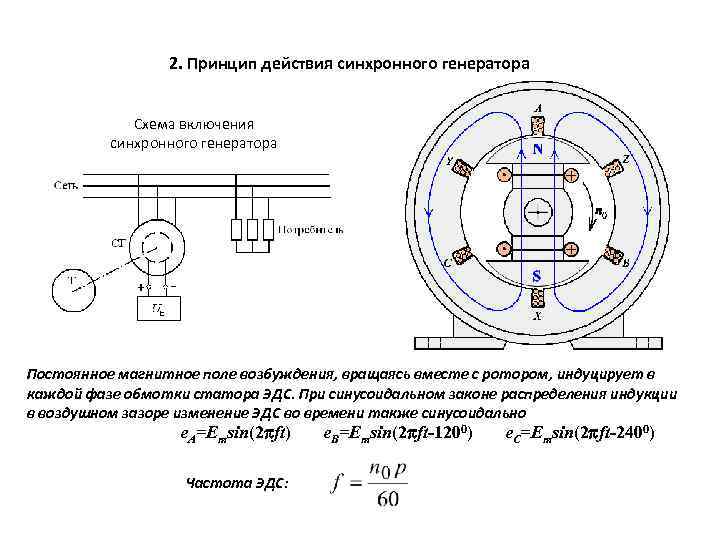
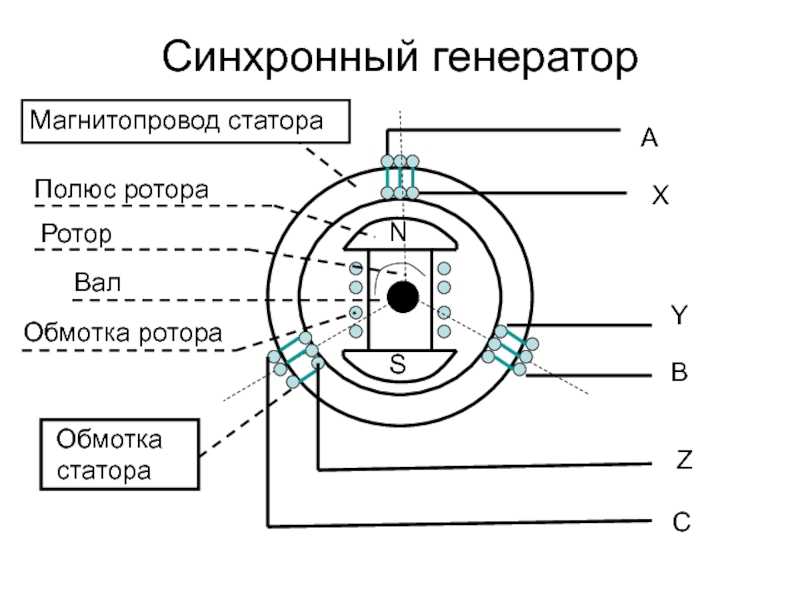
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.

Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
Рис. 4. Схематическое обозначение синхронного электродвигателя
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см.
 рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.Рис. 7. Пример реактивного ротора
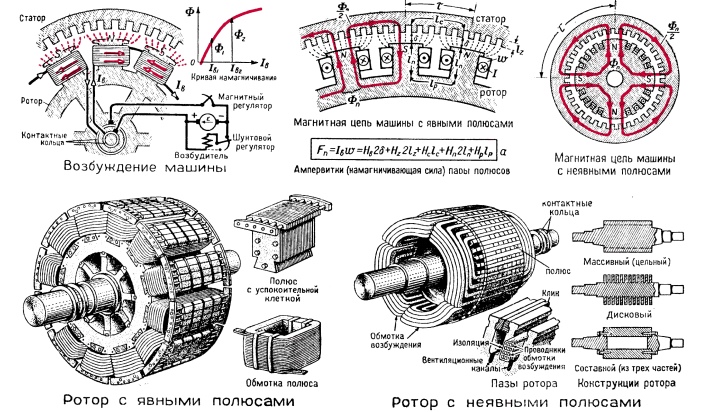
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Механическая и угловая характеристика
В силу особенностей, присущих синхронному двигателю, значение его момента не зависит от оборотов вращения. Это свойство привода определяет его назначение и сферу применения. Технические качества приводного оборудования для конфигурирования электропривода оцениваются зависимостью частоты вращения мотора от электромагнитного момента, развиваемого им.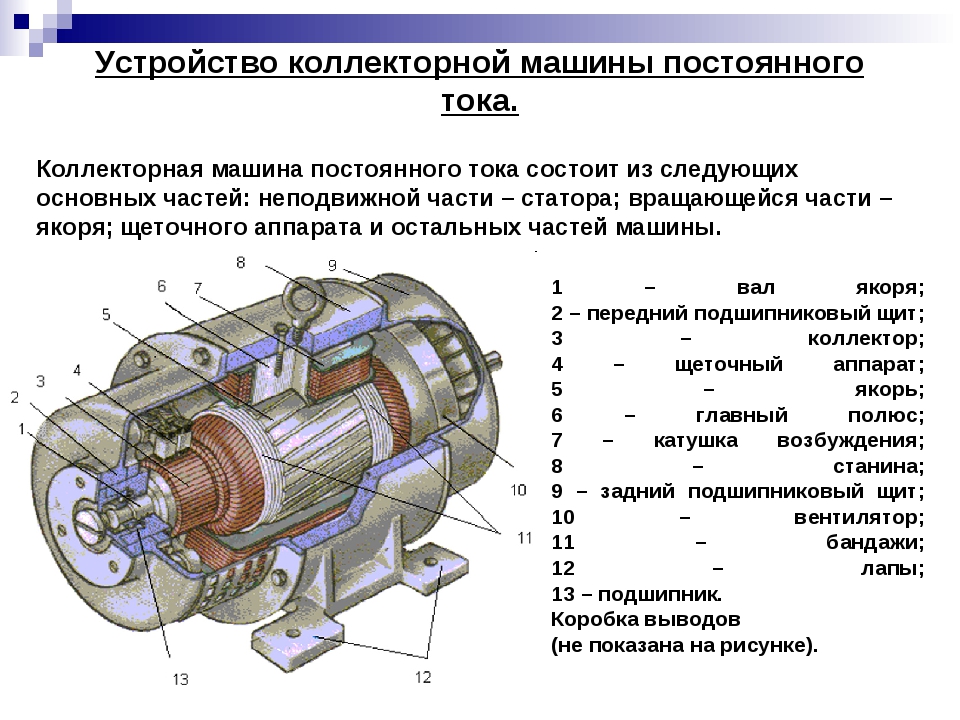 Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Качество механических характеристик оценивается жесткостью. Относительно этого параметра все характеристики делятся на идеально жесткие, жесткие и мягкие. В связи с тем, что частота вращения ротора синхронного двигателя под нагрузкой не меняется, этот тип электромоторов обладает идеально жесткой характеристикой, что выражается формулой:
n = 60*f1/p,
где f1
– частота тока статора;
p –
число пар полюсов статорной обмотки.
Но зависимость n = f (M)
не отражает полного поведения мотора, в котором при увеличении нагрузки происходит смещение осей поля индуктора и якоря. Каждой нагрузке соответствует определенный угол между их осями. Уравнение угловой характеристики:
Mэм = Mmax*sin θ
Это формула, выражает приблизительную зависимость момента на валу от угла вылета ротора. В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
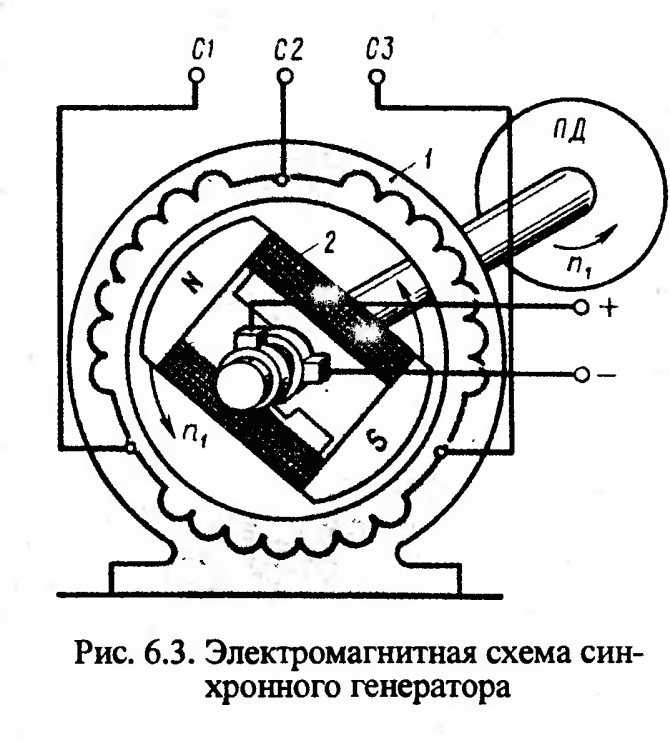
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора.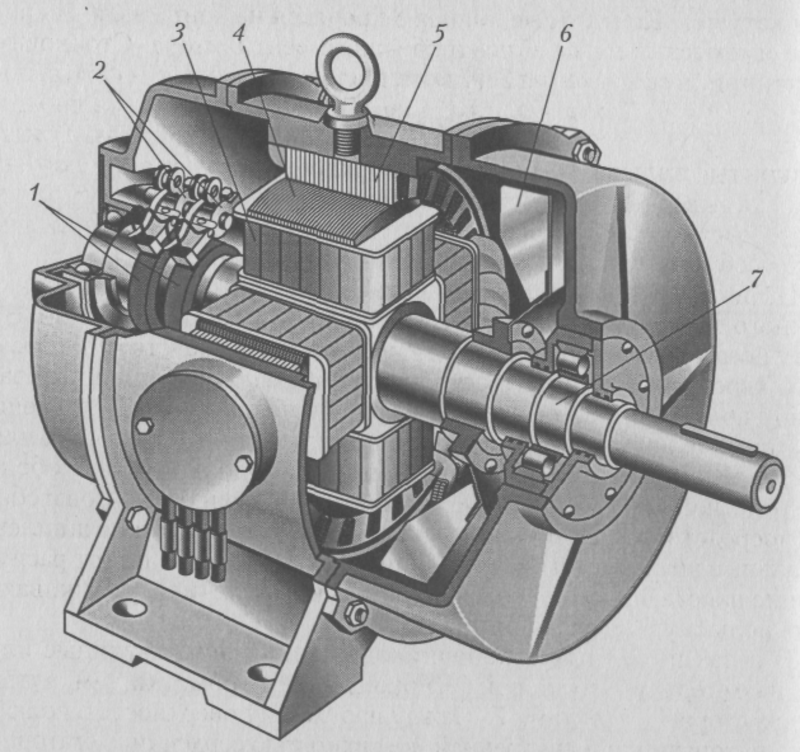 Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Рабочий процесс
Синхронный двигатель это электротехническое устройство, работающее на основе закона электромагнитной индукции. Принцип работы и устройство СД предусмотрены из условия практического применения этого физического явления. Магнитное поле создается трехфазной обмоткой, размещенной в пазах статорного пакета аналогично цепи асинхронной машины. На роторе размещена обмотка возбуждения, питаемая постоянным током. Питание к ней подводится через щетки и кольца. Постоянный ток, протекающий по возбуждающей обмотке, взаимодействует с вращающимся полем индуктора, что вызывает круговое движение вала. Вращающий момент зависит от токовой нагрузки и не зависит от скорости. Вот почему этот тип привода называется синхронный электродвигатель, то есть частота оборотов якоря равна скорости поля индуктора.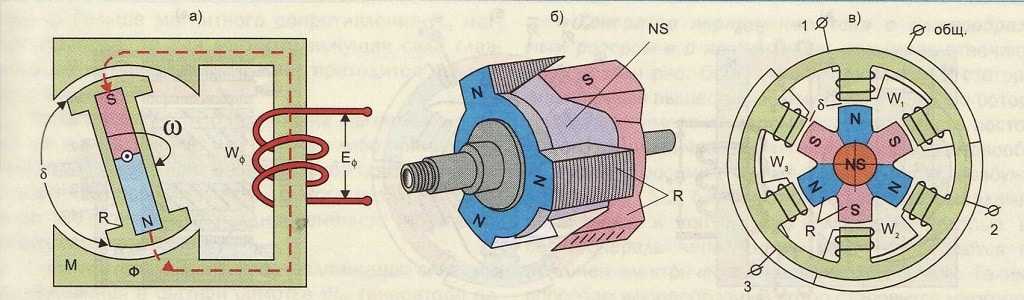
После запуска синхронный двигатель переменного тока вращается одновременно с магнитным потоком. СД не может запускаться с помощью только питающей сети. Это объясняется инерционностью роторного блока и высокой скоростью вращающегося поля. Схема включения маломощной машины предусматривает использование пусковых (демпферных) обмоток, с которыми она работает как синхронный двигатель с короткозамкнутым ротором (то есть реализуется асинхронный пуск). В случае мощных электроприводов пуск производится вспомогательным электромотором или преобразователем частоты.
Наибольшее распространение получил асинхронный пуск, предусматривающий устройство дополнительной КЗ-обмотки. В этом случае синхронный двигатель с короткозамкнутым ротором запускается аналогично асинхронному эл/двигателю. Вследствие таких действий роторный механизм разгоняется до скорости вращающегося магнитного потока. Если синхронный электродвигатель нагружается, расстояние между полюсами якоря и поля увеличивается. Как результат, якорный механизм отстает на нагрузочный угол, что соответствует отставанию от своего положения на холостом ходу.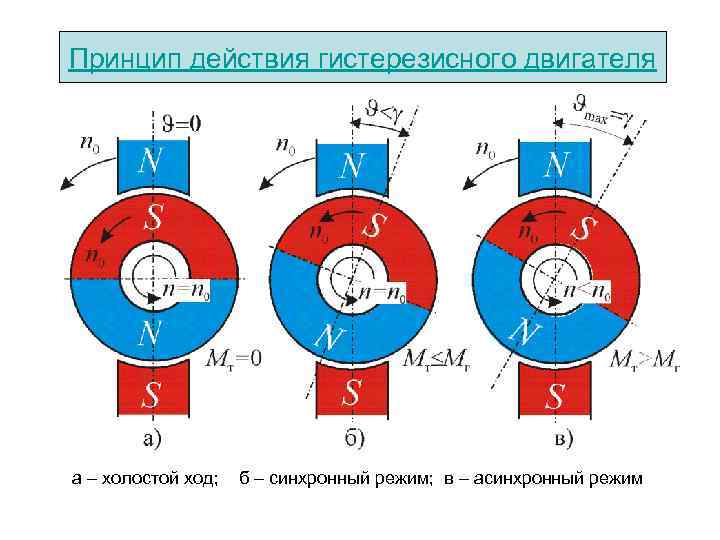
Устройство и принцип действия синхронного двигателя предусматривают эксплуатацию привода с постоянной скоростью, которая не зависит от нагрузки. СД не рассчитан на нагрузку, величина которой превышает пусковую мощность между роторным механизмом и магнитным потоком. В противном случае синхронизм прерывается, и работа синхронного двигателя останавливается.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно.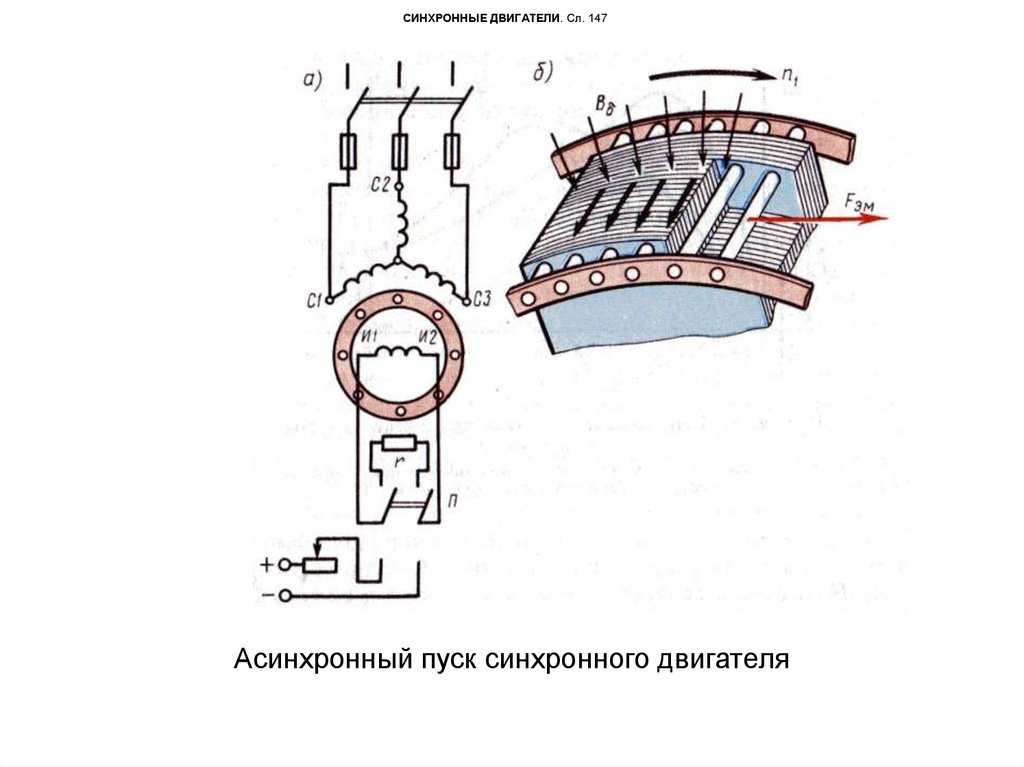 Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. a b c Готтлиб, Ирвинг М. (1997). Практическое руководство по электродвигателю, 2-е изд . США: Ньюнес. С. 73–76. ISBN 978-0-7506-3638-4.
a b c Готтлиб, Ирвинг М. (1997). Практическое руководство по электродвигателю, 2-е изд . США: Ньюнес. С. 73–76. ISBN 978-0-7506-3638-4.
, Newnes, стр. 19/8, ISBN 978-0-7506-4637-6
. Архивировано из оригинального 29 июня 2013 года . Дата обращения 10 мая 2016 .
Ки-Чан Ким; Сеунг-Бин Лим; Дэ-Хён Ку; Джу Ли. Конструкция формы постоянного магнита для синхронного двигателя с постоянным магнитом с учетом частичного размагничивания » . Magnetics, IEEE Transactions on. 2006. doi : 10.1109 / TMAG.
 2006.879077
2006.879077Y. Honda; Т. Накамура; Т. Хигаки; Ю. Такеда. «Соображения по конструкции двигателя и результаты испытаний синхронного двигателя с внутренним постоянным магнитом для электромобилей» . Конференция по отраслевым приложениям, 1997. Тридцать второе ежегодное собрание IAS, IAS ’97., Протокол конференции IEEE 1997 года. 1997. DOI : 10,1109 / IAS.1997.643011
М.А. Рахман; Пинг Чжоу. «Анализ бесщеточных синхронных двигателей с постоянными магнитами» . Промышленная электроника, транзакции IEEE on.
 1996. doi : 10.1109 / 41.491349
1996. doi : 10.1109 / 41.491349.
34
(11): 1755–1763. DOI : 10.1016 / j.energy.2009.04.022 .
. С. 1–6. DOI : 10,1109 / PEDES.2012.6484405 . ISBN 978-1-4673-4508-8. S2CID 25556839 . Проверено 23 сентября 2020 .
.
31
(3): 2417–2428. DOI : 10.1109 / TPEL.2015.2437893 . S2CID 19377123 . Проверено 23 сентября 2022 .
 a b Никбахт, Масуд; Лиаси, Саханд Гасеминеджад; Аббасзаде, Карим; Маркаде, Голамреза Араб (09.09.2020). Усовершенствованная стратегия прогнозирующего управления моделью для управления PMSM с уменьшением пульсаций крутящего момента и магнитного потока . Публикация конференции IEEE
a b Никбахт, Масуд; Лиаси, Саханд Гасеминеджад; Аббасзаде, Карим; Маркаде, Голамреза Араб (09.09.2020). Усовершенствованная стратегия прогнозирующего управления моделью для управления PMSM с уменьшением пульсаций крутящего момента и магнитного потока . Публикация конференции IEEE. С. 1–6. DOI : 10,1109 / PEDSTC49159.2020.9088489 . ISBN 978-1-7281-5849-5. S2CID 218564540 . Проверено 23 сентября 2020 .
. С. 30–35. DOI : 10.1109 / ISIE.2007.4374567 . ISBN 978-1-4244-0754-5. S2CID 35896251 . Проверено 23 сентября 2020 .
электродвигатели
и их применение
, стр. 104, Springer, 1994 ISBN 0-306-44698-7
. Проверено 2 июля 2022 .
 a b Стандарт IEEE 141-1993 Рекомендуемая практика для распределения электроэнергии на промышленных предприятиях
a b Стандарт IEEE 141-1993 Рекомендуемая практика для распределения электроэнергии на промышленных предприятияхстр. 227-230
, стр. 192, CRC Press, 2007 ISBN 0-8493-4034-9 .
.
51
(3): 2676–2682. DOI : 10.1109 / tia.2014.2373820 . ISSN 0093-9994 .
, стр. 32, IEE, 1988 ISBN 0-86341-114-2 .
.
25
(6): 1012–1018. DOI : 10.1109 / 28.44236 . ISSN 0093-9994 .
↑ Schaefer, RC (1999). «Управление возбуждением синхронного двигателя».
 а б Дубей Г. К. Основы электроприводов
а б Дубей Г. К. Основы электроприводов. Нароса, издательство ченнаи. п. 254.
(второе изд.). Новый век интернэшнл. п. 25.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Содержание
- 1 Тип 1.1 Невозбужденные двигатели 1.1.1 Реактивные двигатели
- 1.1.2 Гистерезисные двигатели
- 1.1.3 Двигатели с постоянными магнитами
 2 Двигатели с возбуждением постоянным током
2 Двигатели с возбуждением постоянным током- 3.1 Примеры
- 7.1 Использование в качестве синхронного конденсатора
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.

Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Устройство и принцип действия синхронного двигателя
Принцип действия синхронного двигателя примерно такой же, как и у асинхронного. Но есть несколько отличий, которые имеют ключевое значение при выборе мотора для той или иной конструкции. В промышленности получили широкое распространение асинхронные машины – их доля достигает 96% от общего количества электрических двигателей. Но это вовсе не говорит о том, что отсутствуют другие типы электрических агрегатов.
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока.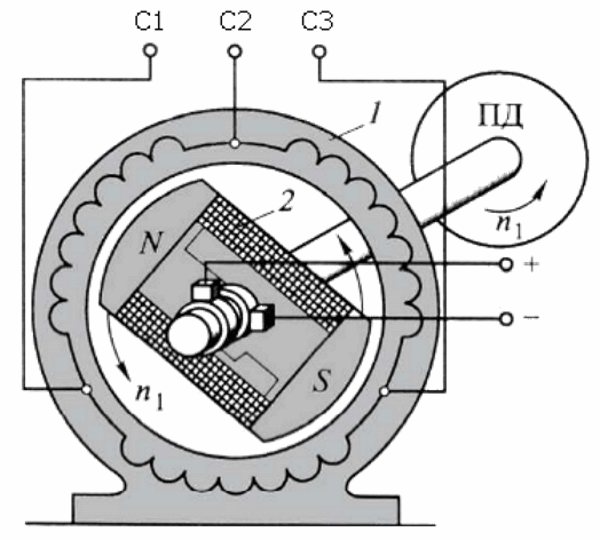 И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение. В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение. В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны. Конструкция включает в себя такие элементы, как:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
 Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
 Потребление электроэнергии крайне маленькое.
Потребление электроэнергии крайне маленькое.Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя
В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
- Явнополюсными.
- Неявнополюсными.
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.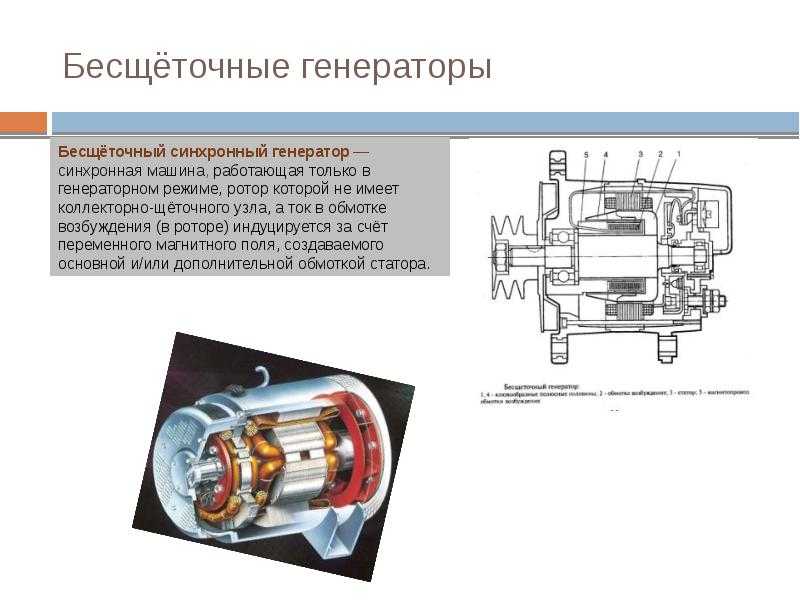
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Самое сложное в работе синхронного мотора – это его запуск. Именно поэтому его используют крайне редко. Ведь конструкция усложняется за счет системы запуска.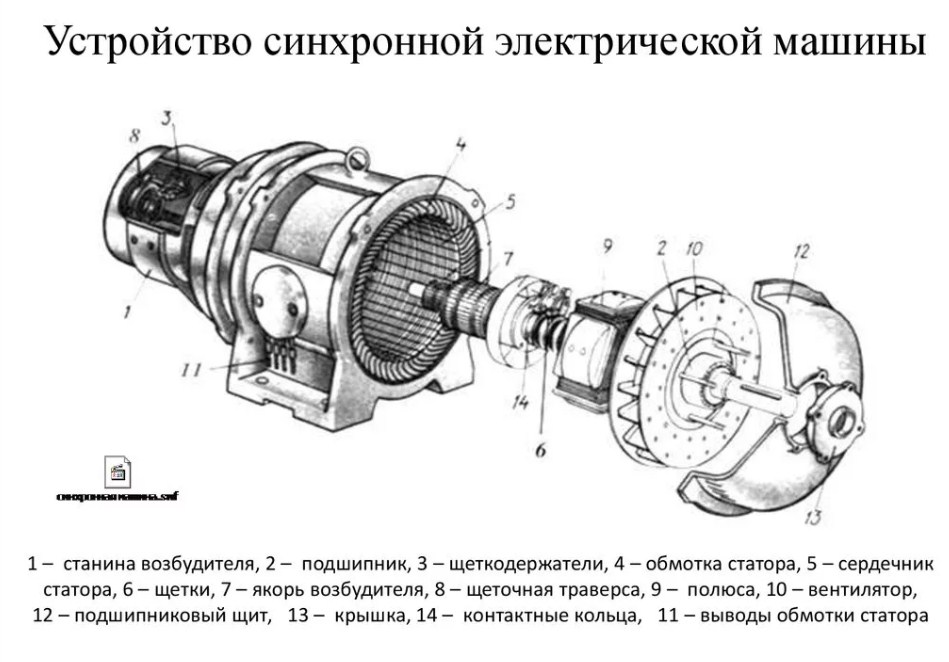 На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним. Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты. Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним. Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты. Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности.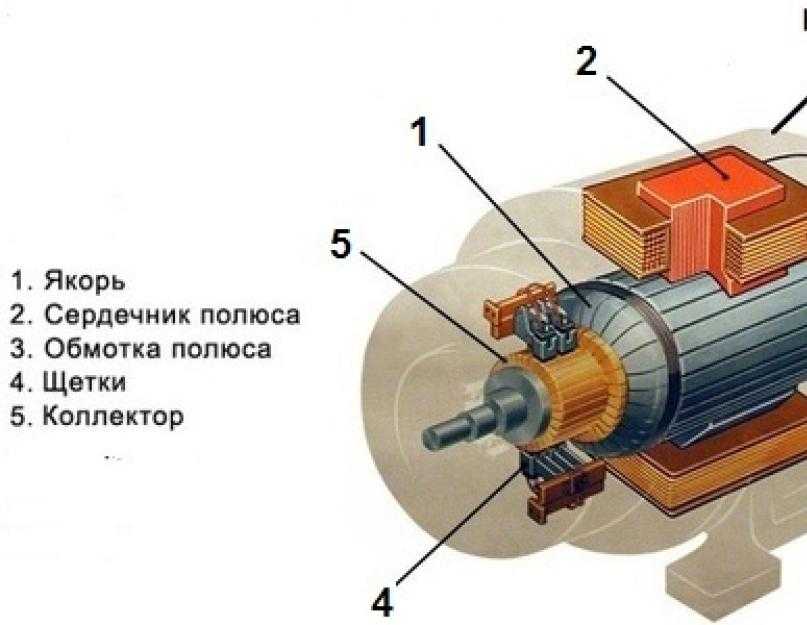 Также можно выделить такие достоинства, как:
Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
Устройство и принцип работы электродвигателя переменного тока
Содержание
- 1 Электрические двигатели: разновидности
- 1. 1 Коллекторные двигатели
- 1.2 Асинхронные двигатели
- 1.3 Синхронные двигатели
- 1.
- 2 Как работают электрические двигатели
- 2.1 Асинхронные двигатели
- 3 Работа синхронных двигателей
 1 Коллекторные двигатели
1 Коллекторные двигателиДвигатели электрические выпускают синхронные, асинхронные, коллекторные, каждому присущи особенности работы. Минус большой: сеть интернет дает скудные представления о различиях в работе, принципе действия. Можем читать обзоры про синхронные электродвигатели, не понять в итоге главного: нюансов! Почему на ГЭС используются такие генераторы, в быту моторов-зеркал не видно (двигатель переменного тока обратим)?
Электрические двигатели: разновидности
Сразу скажем, не ставили целью довести вниманию читателей исчерпывающую информацию по указанной теме. Невозможно объять необъятное. Будут рассматриваться случаи, опущенные литературой. Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.
Начнем простым перечислением.
Двигатель коллекторного типа
Коллекторные двигатели
Часто путают с синхронными. Обнаруживаются угольные щетки. Этим сходство ограничивается, частота вращения коллекторных двигателей меняется в широких пределах, каждый может лицезреть на примере стиральной машины. Управление скоростью осуществляется путем коммутации обмоток, подстройкой значения действующего напряжения (изменяется угол отсечки вольтажа промышленной частоты).
Главным отличием устройств является наличие коллектора. Своеобразная секционная конструкция, насаженная на вал. Составлена множеством катушек, равномерно идущих кругом. Коллектор обеспечивает последовательную коммутацию, чтобы поле постепенно двигалось вкруг вала. Цепляясь за статор, ротор начинает движение.
К недостаткам коллекторных двигателей причисляют хрупкость (для промышленности). В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды).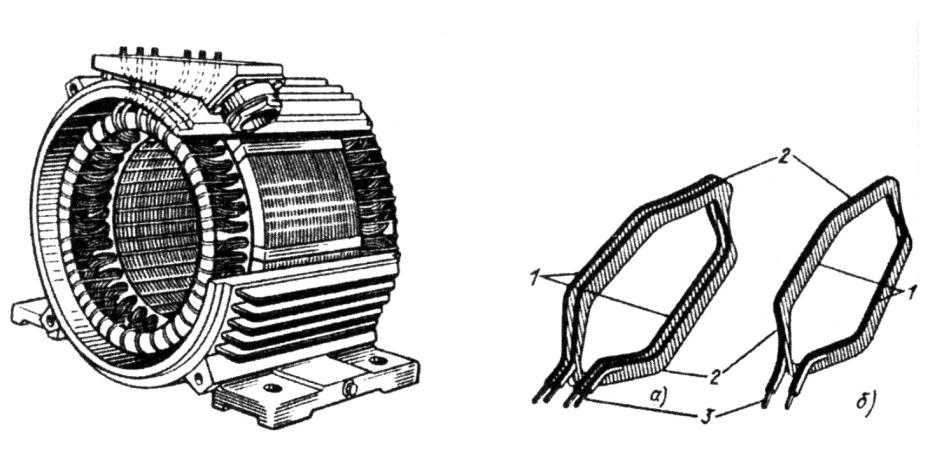 Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
Можно поставить вместо него магнит, вращать поле статора? Да, получим синхронный двигатель (типичный пример – помпы стиральных машин). Можно питать обмотку постоянным током, вращать поле статора? Да, будет синхронный двигатель. Видите, коллектор однозначно дает понять тип устройства.
Асинхронные двигатели
Чаще применяются промышленностью. Получаем простоту конструкции, кучу плюшек. Ударопрочность, вибропрочность: отсутствие угольных щеток. Взамен получается кипа конструкций. Семейство самое многочисленное.
Асинхронный двигатель
Во-первых, ротор. Может быть короткозамкнутым, фазным. Первое означает: на вал насажена конструкция (для уменьшения веса силуминовая), где вставлены прожилки меди. Закорочено периметром двумя кольцами. Получается барабан, иногда называемый беличьей клеткой.
Возникает поле под действием вращающейся ЭДС статора, в отличие от коллекторных запуск асинхронных двигателей постоянным током не производят.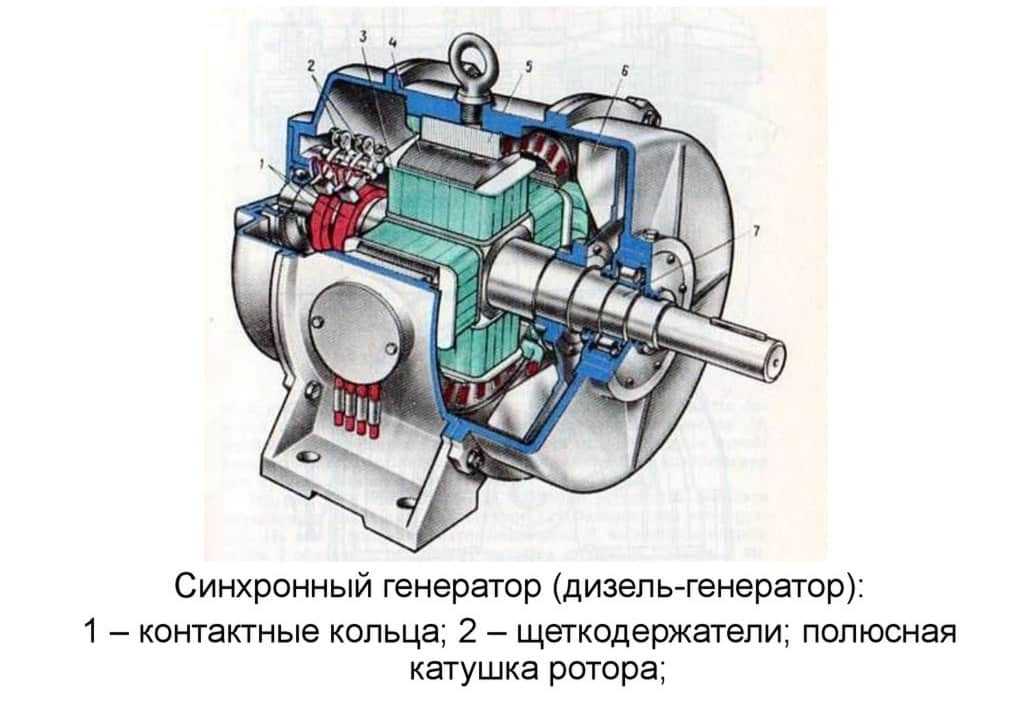 Вторичное отличие. Первичное назвали: к ротору не подходят контакты (исключая пусковой реостат), вал увенчан беличьей клеткой, вывод о принадлежности однозначный. Что касается фазных асинхронных машин, питание катушек ротора производится через токосъемные кольца. Вал подхватывается, постепенно набирает обороты.
Вторичное отличие. Первичное назвали: к ротору не подходят контакты (исключая пусковой реостат), вал увенчан беличьей клеткой, вывод о принадлежности однозначный. Что касается фазных асинхронных машин, питание катушек ротора производится через токосъемные кольца. Вал подхватывается, постепенно набирает обороты.
Синхронные двигатели
Тип устройств, составить понятие о котором, согласно заметкам сети попросту невозможно. Отличие простое: поле настолько сильное, что захватывается без проблем, не проскальзывает, как в случае с асинхронными или (в меньшей степени) коллекторными двигателями. Обеспечивается постоянным магнитом чаще, либо обмотка возбуждения находится на роторе. Статор снабжается переменным напряжением нужной частоты.
Скорость вращения зависит от частоты сети питания. Полюсов только два, поэтому составляет 25 Гц (1500 об/мин). Черта, по которой можно предположить: видим синхронный двигатель – кратное, целое число. Ключевым является совпадение скорости вращения вала и частоты напряжения питания. Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Как работают электрические двигатели
Асинхронные двигатели
Кратенько описали внешние отличия электрических двигателей, теперь пара слов по поводу устройства и функционирования. Асинхронные двигатели при помощи статора создают по оси вращающееся магнитное поле. Барабан беличьей клетки редко изготавливается из ферромагнитных материалов (если вообще имеет место быть). В противном случае нагрев вышел бы значительным. Фактически получается индукционная печь.
Силуминовый барабан вдоль линий магнитного поля содержит медные проводники. Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
На запуске частота тока, глубина проникновения поля велики. Включаются в работу оба слоя беличьей клетки. По мере разгона разница нивелируется, падает до нуля. Амплитуда поля снижается, рабочим остается внешний слой беличьей клетки. Обратите внимание, догнать поле ротор бессилен, проскальзывает, запаздывает. Поэтому двигатели получили название асинхронных. Англичане делают проще – зовут индукционными.
Если поле вращать со скоростью ротора, ЭДС перестает наводиться. Последует замедление, цикл повторится, начавшись разгоном. Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
- Подпитывается электричеством через кольцо токосъемника. Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.
- Подпитывается постоянным током. Образуется синхронный двигатель.
- Снабжается реостатами, дросселями, регулирующими скорость.
- Реализует управление инвертором (усложненный первый случай).
 Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.
Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.Принцип действия асинхронных двигателей: используется наведенная ЭДС, скорость вращения неспособна догнать поле (пропадают токи). Иначе тип мотора меняется (синхронный). Для регуляции скорости часто используется амплитуда питающего напряжения. Способ годится двигателям асинхронного типа с короткозамкнутым, фазным ротором. Перечислим методики:
Работа двигателя переменного тока
- Для машин с короткозамкнутым ротором годятся:
- Регулирование частоты напряжения питания.
- Изменение числа пар полюсов статора. В результате меняется скорость вращения поля, давая нужный эффект.
- Для машин с фазным ротором допускается:
- Вводить реостат в цепь питания. Растут потери на скольжение, закономерно изменяя скорость.
- Применять специальные вентили. Энергия скольжения выпрямляется схемой Ларионова, подается в виде постоянного напряжения вспомогательному электрическому двигателю, нарезающему импульсы через управляемые извне тиристоры. Мощность, которая обычно терялась бы, возвращается. Через вал вспомогательного двигателя, трансформатор, обмотки которого частично включены в сеть питания. Управление скоростью выполняют внедрением дополнительной ЭДС. Делается либо напрямую (через источник питания), либо сдвигом угла включения тиристоров относительно питания. Частота отклоняется от номинала.
- Двигатель двойного питания является вариантом реализации регулировки скорости в оборудовании с фазным ротором. Тип чаще применяется для реализации схем генераторов. Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
- Вводить реостат в цепь питания.
 Растут потери на скольжение, закономерно изменяя скорость.
Растут потери на скольжение, закономерно изменяя скорость.
Асинхронным двигателям годится изменение амплитуды питания. Наибольшим КПД обладают вентильные схемы, самые дорогие.
Двигатель асинхронного типа
Работа синхронных двигателей
Проходились по коллекторным двигателям – рассказывали, как конструировать – поэтому пропускаем сегодня семейство. Бессильны иначе рассказать вещи гораздо интереснее: ведется много споров на форумах. Собираемся рассмотреть не совсем синхронные двигатели – генератор. Наподобие украшающих ГЭС.
Вы никогда не задумывались, как регулируется скорость вращения турбины, когда на лопасть падает поток воды? Створками направляющего аппарата? Нет. Генератор требует подпитки не только постоянным током, но и переменным. Первое подаётся на ротор, а второе – на статор. В результате вал не мог бы даже стронуться с места, но ему помогает вода. А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
Фактически имеем на руках устройство электродвигателя переменного тока, среди обмоток большая часть генерирующих, снимается частота 50 Гц. Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Вал вращается со скоростью 1-2 оборота в секунду. Многочисленными генераторными обмотками, соединенными параллельно образует нужную форму синусоиды. Подчеркиваем, частота поддерживается напряжением возбуждения, следовательно, именно к нему и предъявляются повышенные требования. Требуется получить больше мощности электростанции, просто заслонки направляющего аппарата приоткрываются, масса воды начинает падать вниз. Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Принцип действия электродвигателя переменного тока копирует сказанное, отсутствуют генераторные обмотки.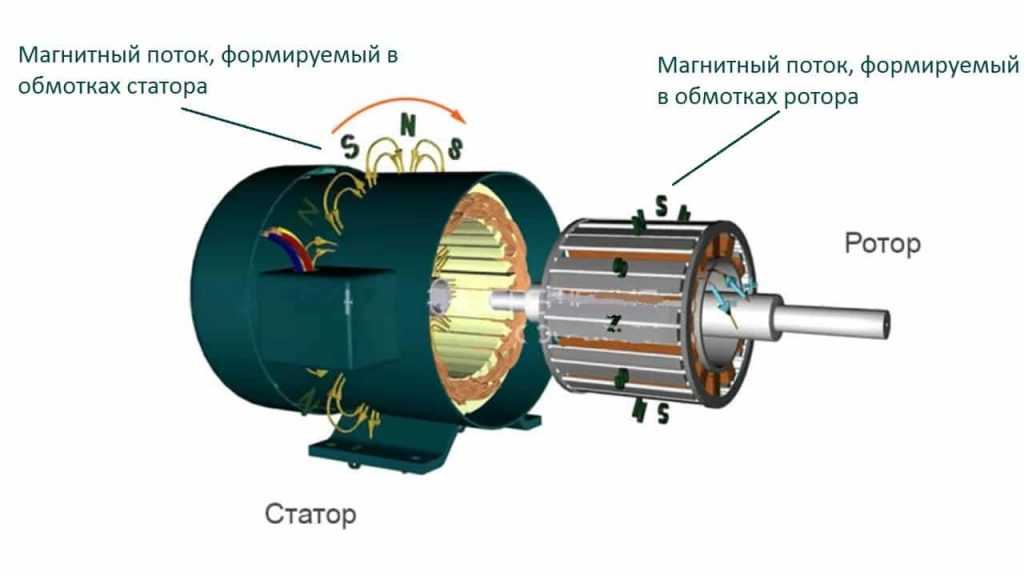 Требуется получить больше мощности – увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Требуется получить больше мощности – увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Не успели сегодня рассмотреть технические характеристики электродвигателей переменного тока, многократно делали прежде, применительно к различного рода устройствам. Полагаем, в будущем обзоры могут вновь повернуться к теме бушпритом.
Принцип работы синхронного двигателя— руководство по электротехнике
Привет друзья,
В этой статье я собираюсь обсудить конструкцию и принцип работы синхронного двигателя . Надеюсь, вам будет интересно и полезно.
Конструкция синхронного двигателя очень похожа на конструкцию синхронного генератора. Основные части синхронного двигателя такие же, как и у синхронного генератора, то есть статор и ротор.
Статор содержит трехфазную обмотку якоря в пазах его пластинчатого сердечника, распределенных по всему ярму. Эта обмотка аналогична используемой в синхронных генераторах и асинхронных двигателях. Он подключен к 3-фазной сети переменного тока.
Обмотка возбуждения размещается в пазах ротора и подключается к источнику постоянного тока через два контактных кольца. Из-за этого источника постоянного тока (известного как возбуждение) полюса ротора попеременно становятся полюсами
Простой синхронный двигатель в принципе не запускается самостоятельно . Однако его можно сделать самозапускающимся с помощью демпферных обмоток, удерживаемых полюсами ротора.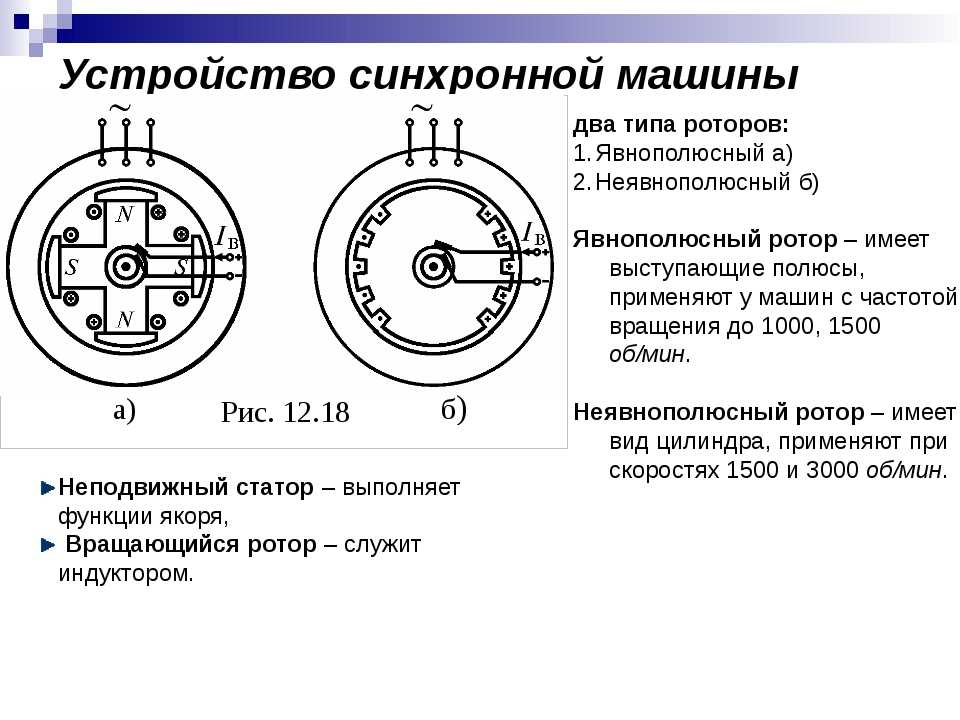 Этот двигатель называется синхронным, потому что его ротор работает синхронно с синхронно вращающимся полем статора.
Этот двигатель называется синхронным, потому что его ротор работает синхронно с синхронно вращающимся полем статора.
Принцип работы синхронного двигателя основан на принципе магнитной блокировки между полюсами статора и ротора.
Понять принцип работы синхронного двигателя , пусть статор синхронного двигателя намотан на два полюса. Пусть ротор также образует два полюса при их возбуждении внешним источником постоянного тока.
Поскольку трехфазный источник переменного тока подключен к обмотке статора, создается вращающееся магнитное поле (RMF). Это поле вращается с синхронной скоростью N s . Два произведенных полюса: N 1 и S 1 , как показано на рисунке.
Эти полюса статора (N
Затем ротор возбуждается внешним источником постоянного тока. Он производит два полюса N 2 и S 2 , как показано на рисунке.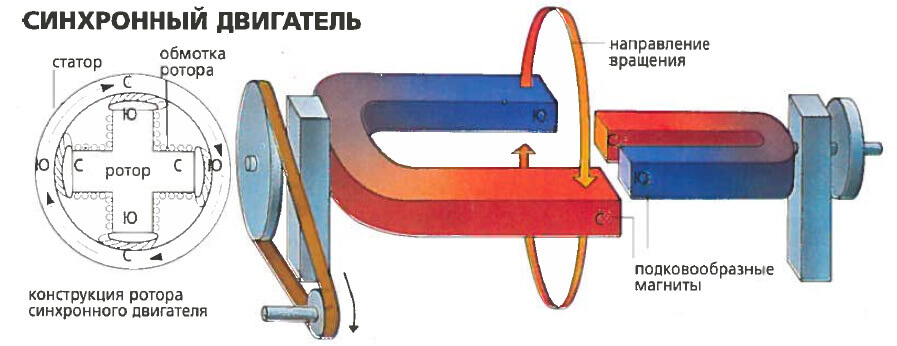
Ротор ускоряется, чтобы вращаться по часовой стрелке с помощью какого-то внешнего двигателя. Это связано с тем, что синхронный двигатель не запускается самостоятельно.
Если разноименные полюса N 1 – S 2 и S 1 – N 2 приблизятся друг к другу, то за счет большой силы притяжения между ними произойдет магнитная блокировка.
Как только полюса статора и ротора магнитно заблокируются друг с другом, ротор продолжит вращаться с синхронной скоростью вместе с вращающимся магнитным полем. Затем внешний двигатель, соединенный с ротором, может быть отсоединен.
Ротор будет вращаться со скоростью N с , пока существует магнитный замок между статором и ротором.
Когда синхронный двигатель подключается к сети и запускается каким-либо внешним способом, он начинает вращаться с синхронной скоростью. Если двигатель работает на холостом ходу и потерь нет, то ЭДС индукции равна E равно и противоположно приложенному напряжению, а полюса статора и ротора совпадают друг с другом, как показано на рисунке.
Результирующая ЭДС E r и, следовательно, ток, потребляемый двигателем, равен нулю. Таким образом, говорят, что двигатель плавает в проводах.
Однако в реальной машине всегда присутствуют некоторые потери с результирующей ЭДС; E отклоняется назад на небольшой угол, и полюса ротора также отклоняются назад на такой же угол относительно полюсов статора.
Это вызывает результирующее напряжение E r на якоре, и двигатель потребляет ток холостого хода от сети. Мощности, потребляемой двигателем, достаточно, чтобы двигатель работал непрерывно на синхронной скорости.
Теперь при приложении нагрузки к валу двигателя ротор еще немного отклоняется назад относительно полюсов статора. Следовательно, угол крутящего момента или угол нагрузки δ увеличивается с увеличением нагрузки. Это увеличивает результирующее напряжение, E r , что, в свою очередь, увеличивает ток, потребляемый двигателем от сети.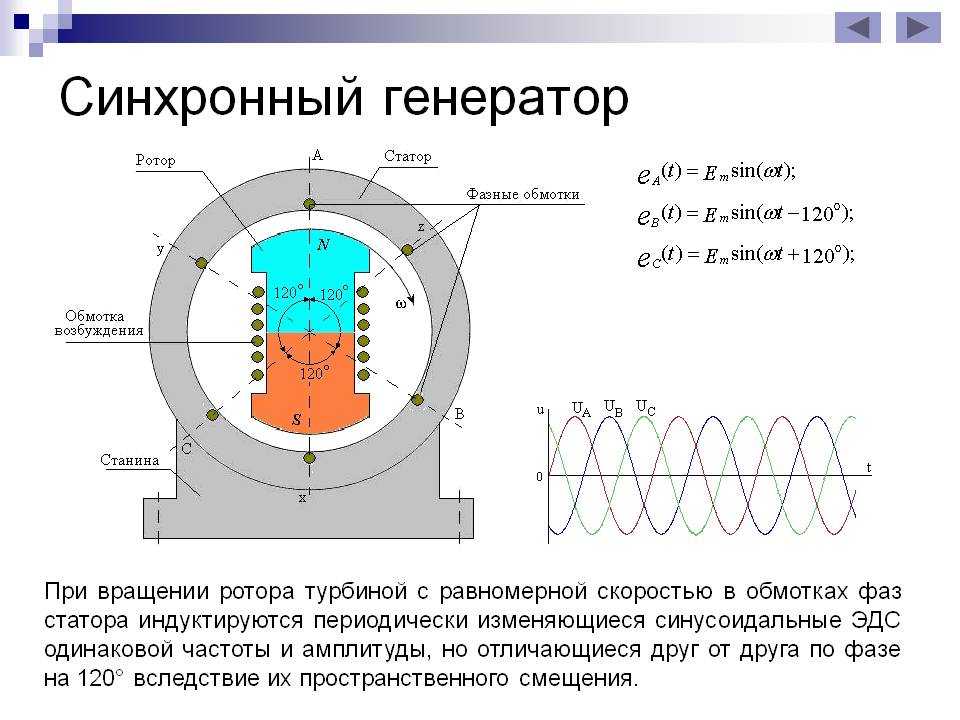
Таким образом, синхронный двигатель способен обеспечивать возрастающие механические нагрузки не за счет снижения скорости, а за счет смещения положения полюсов ротора по отношению к полюсам статора.
При дальнейшем увеличении нагрузки, приложенной к валу двигателя, полюса ротора и ЭДС индукции падают еще больше. Следовательно, угол нагрузки δ увеличивается с увеличением нагрузки. Когда δ увеличивается, результирующее напряжение E r увеличивается, а вместе с ним и ток якоря.
Если к синхронному двигателю приложена слишком большая механическая нагрузка, ротор выходит из синхронизма. И заходит в тупик.
Максимальное значение крутящего момента, которое может развить двигатель без потери синхронизма, называется тяговым моментом.
Спасибо, что прочитали о конструкции и «принципе работы синхронного двигателя». Для получения дополнительной информации посетите Википедию.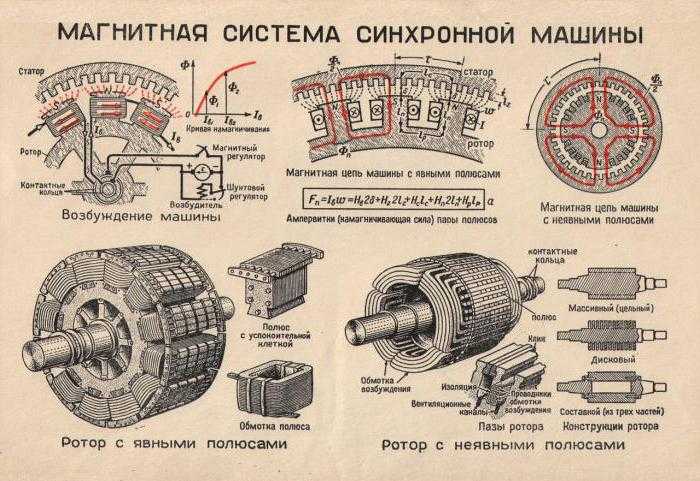
Синхронный двигатель — Конструкция, принцип действия, типы, характеристики
Синхронный двигатель — один из самых эффективных двигателей. Возможность управления их коэффициентом мощности делает их очень востребованными, особенно для низкоскоростных приводов. В этом посте мы обсудим синхронный двигатель, его конструкцию, принцип работы, типы, характеристики, методы пуска, применение, модель/фазорную диаграмму, преимущества и недостатки.
Что такое синхронный двигатель
Синхронный двигатель — это двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой подаваемого тока; период вращения точно равен целому числу циклов переменного тока.
Рис. 1 – Синхронный двигатель
Эти двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, которое вращается в такт колебаниям сетевого тока. Синхронный двигатель имеет двойное питание, если он снабжен независимыми возбужденными многофазными электромагнитами переменного тока как на роторе, так и на статоре.
Конструкция синхронного двигателя
Конструкция аналогична другим двигателям. Статор и ротор являются основными частями синхронного двигателя, в то время как рама представляет собой крышку, а статор и ротор составляют электрическую и магнитную схемы синхронных двигателей. Основными компонентами двигателя являются:
- Статор
- Ротор
- Ассурактер
- Кадр
Рис. 2 — Компоненты Synchronous Motor
STATTOR
9151915191519151. Он имеет цилиндрическую раму с прорезями для установки схемы обмотки. Статор состоит из сердечника, который обычно состоит из стали. Этот сердечник изолирован для предотвращения протекания вихревых токов.Рис. 3 – Компоненты статора
Цепь обмотки статора называется обмоткой статора. Он питается от трехфазной сети переменного тока.
Ротор
Ротор — это вращающаяся часть, которая вращается точно с той же скоростью, что и магнитное поле статора. Он возбуждается источником постоянного тока.
Он возбуждается источником постоянного тока.
Ротор состоит из числа полюсов, которое зависит от скорости и частоты машины. Соотношение между полюсом, скоростью и частотой определяется как
Где
N = скорость двигателя в об/мин
f = частота и
p = Число полюсов
Типы конструкции ротора синхронного двигателя
В синхронных двигателях существует два типа конструкции ротора. К ним относятся:
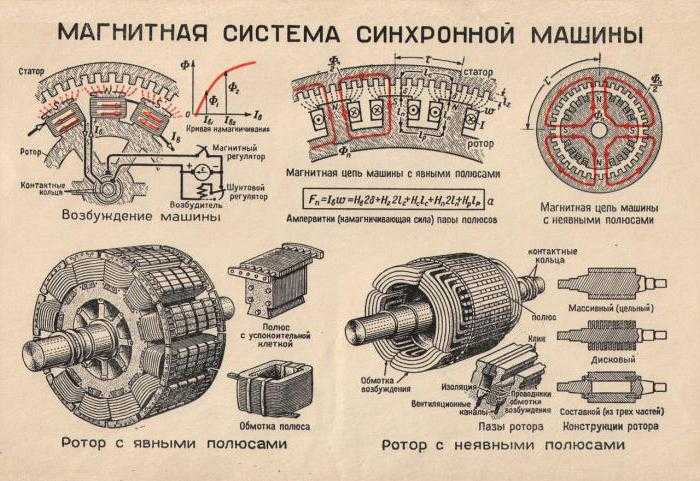
- Роторы с явно выраженными полюсами
- Роторы с явно выраженными полюсами
Роторы с явно выраженными полюсами
В роторах с явно выраженными полюсами полюса выступают над поверхностью ротора.
Рис. 4 – Ротор с явно выраженными полюсами
Роторы с неявнополюсными роторами
В роторах с неявнополюсными полюсами обмотка размещается в прорезях ротора, обработанных механическим способом.
Рис. 5 – Неявнополюсный ротор
5 – Неявнополюсный ротор
Возбудитель
Это небольшой генератор, помещенный в ротор, который обеспечивает мощность возбуждения для возбуждения. Он состоит из обмотки возбуждения и обмотки якоря. Обмотка возбуждения размещена в статоре, а обмотка якоря — в роторе машины.
Рама
Защищает двигатель и закрывает весь узел.
Принцип работы синхронного двигателя
Работа синхронного двигателя заключается в том, что ротор следует за вращающимся магнитным полем статора и вращается со скоростью, приближающейся к нему. Обмотка ротора возбуждается источником постоянного тока, а обмотка статора возбуждается источником переменного тока.
Рис. 6 – Принцип работы синхронного двигателя
Основные моменты, касающиеся принципа работы синхронного двигателя:
- Благодаря трехфазному переменному току обмотка статора создает трехфазное вращающееся магнитное поле.
- Обмотка ротора создает постоянное магнитное поле.
- При некоторых оборотах полюса двух магнитных полей притягиваются, а в какой-то момент отталкиваются.
- Ротор не начнет вращаться из-за инерции. Таким образом, внешний источник обеспечит начальное вращение.
- Как только ротор начинает двигаться с синхронной скоростью, внешний источник отключается.
- Магнитное поле ротора создается не магнитным полем ротора, а индукцией. Следовательно, воздушный зазор между ротором и статором остается не очень маленьким.
Типы синхронных двигателей
Синхронные двигатели можно разделить на два типа в зависимости от того, как намагничивается ротор.
- Синхронные двигатели без возбуждения
- Синхронные двигатели постоянного тока с возбуждением
Синхронные двигатели без возбуждения
Ротор изготовлен из стали. На синхронной скорости он вращается с вращающимся магнитным полем статора, поэтому через него проходит почти постоянное магнитное поле. Ротор изготовлен из стали с высоким удерживающим свойством, такой как кобальтовая сталь.
Синхронные двигатели без возбуждения доступны в трех исполнениях:
- Синхронные двигатели с гистерезисом
- Синхронные двигатели с реактивным сопротивлением
- Синхронные двигатели с постоянными магнитами
Гистерезисные двигатели представляют собой однофазные двигатели, в которых ротор изготовлен из ферромагнитного материала. Роторы обладают высокими потерями на гистерезис. Они состоят из хрома, кобальтовой стали или альнико.
Рис. 7 – Гистерезисный синхронный двигатель
Они самозапускающиеся и не требуют дополнительной обмотки. У него широкая петля гистерезиса, что означает, что он намагничивается в заданном направлении; для обращения намагниченности требуется большое обратное магнитное поле.
Синхронные двигатели с реактивным сопротивлением
Сопротивление всегда минимально, когда кусок железа вращается, чтобы завершить путь магнитного потока. Сопротивление увеличивается с увеличением угла между ними, когда полюса выровнены с магнитным полем статора. Это создаст крутящий момент, притягивающий ротор к полюсу рядом с полем статора.
Сопротивление увеличивается с увеличением угла между ними, когда полюса выровнены с магнитным полем статора. Это создаст крутящий момент, притягивающий ротор к полюсу рядом с полем статора.
Рис. 8 – Реактивный синхронный двигатель
Полюса ротора обычно имеют встроенную короткозамкнутую обмотку для обеспечения крутящего момента ниже синхронной скорости для запуска двигателя.
Синхронные двигатели с постоянными магнитами
В двигателе с постоянными магнитами используются постоянные магниты в стальном роторе для создания постоянного магнитного потока. Ротор блокируется, когда скорость близка к синхронной скорости.
Рис. 9 – Синхронный двигатель с постоянными магнитами
Статор имеет обмотку, которая подключена к источнику переменного тока для создания вращающегося магнитного поля. Двигатели с постоянными магнитами аналогичны бесщеточным двигателям постоянного тока.
Синхронный двигатель постоянного тока с возбуждением Синхронный двигатель постоянного тока с возбуждением требует подачи постоянного тока на ротор для создания магнитного поля. Он имеет как обмотку статора, так и обмотку ротора. Постоянный ток может подаваться от отдельного источника постоянного тока или от генератора постоянного тока, подключенного к валу двигателя.
Он имеет как обмотку статора, так и обмотку ротора. Постоянный ток может подаваться от отдельного источника постоянного тока или от генератора постоянного тока, подключенного к валу двигателя.
Характеристики синхронного двигателя
Некоторые ключевые характеристики синхронного двигателя, которые отличают его от других двигателей, следующие:
Скорость
Диапазон скоростей от 150 об/мин до 1800 об/мин. Скорость синхронна и не зависит от условий нагрузки. Скорость всегда остается постоянной от холостого хода до полной нагрузки.
Соотношение между числом полюсов, скоростью и частотой определяется как
Где,
N = скорость двигателя в об/мин
Starting Torque
Для запуска синхронного двигателя требуется внешнее усилие, поскольку он не имеет пускового момента.
Номинальная мощность
Номинальная мощность синхронных двигателей находится в диапазоне от 150 кВт до 15 МВт.
Эффективность
Синхронные двигатели являются высокоэффективными машинами, и их эффективность намного выше, чем у асинхронных двигателей.
Техническое обслуживание
В синхронных двигателях используется бесщеточный возбудитель, что снижает потребность в обслуживании.
Коррекция коэффициента мощности
Эти двигатели имеют высокую коррекцию коэффициента мощности, поэтому они используются в областях, где необходима коррекция коэффициента мощности.
Методы пуска синхронного двигателя
Как известно, синхронные двигатели не могут запускаться самостоятельно, поскольку у них нет пускового момента. Поэтому для запуска двигателя используются разные способы. Внешняя сила используется при пуске для доведения скорости до синхронной. Три основных способа:
- Уменьшите частоту статора до безопасного пускового уровня.
- Используйте внешний первичный двигатель.
- Использование демпферной обмотки.
Схема модели и векторная диаграмма синхронного двигателя
Структура поля стимулируется постоянным током в синхронном двигателе.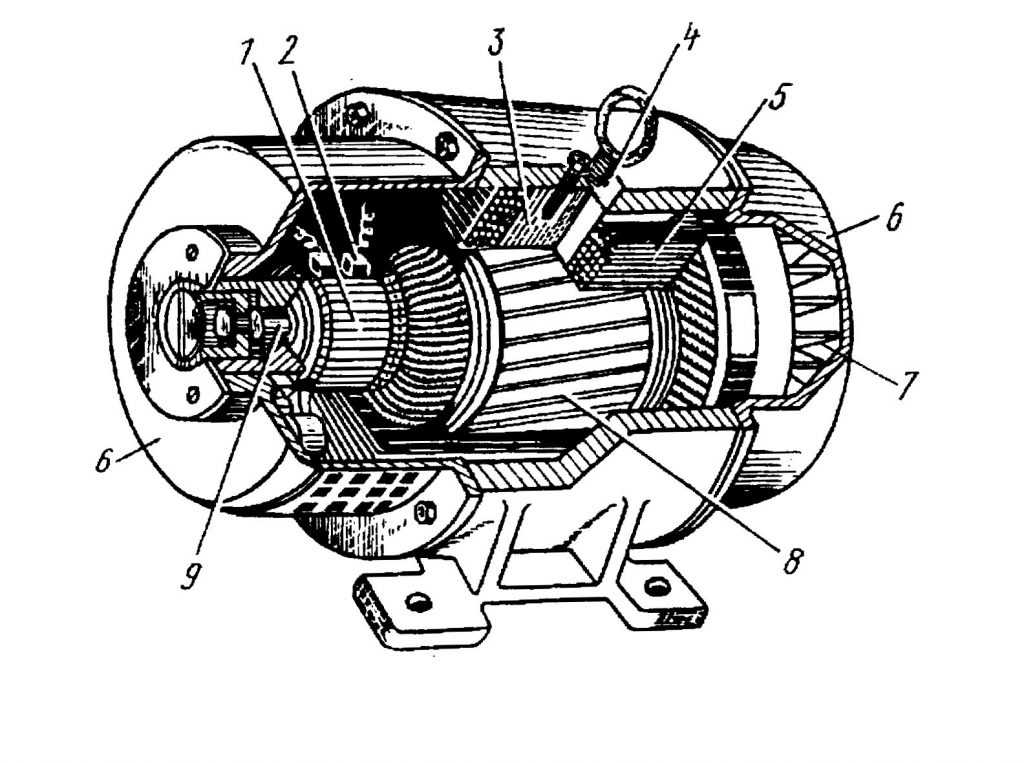 Из-за вращающегося магнитного поля в обмотке статора индуцируется напряжение и это напряжение называется противо-ЭДС (Е).
Из-за вращающегося магнитного поля в обмотке статора индуцируется напряжение и это напряжение называется противо-ЭДС (Е).
Рис. 10 – Модельная схема синхронного двигателя
Эффект реакции якоря заменяется фиктивным реактивным сопротивлением (Ха). Когда Xa объединяется с реактивным сопротивлением рассеяния якоря, получается синхронное реактивное сопротивление (Xs). Когда Xs комбинируется с эффективным сопротивлением якоря (Re), получается синхронный импеданс (Zs).
Рис. 11 – Векторная диаграмма синхронного двигателя
Для того, чтобы построить векторную диаграмму, Vt берется в качестве эталонного вектора, и необходимо соблюдать следующие пункты:
- Если машина работает как асинхронный двигатель, то направление тока якоря будет противоположно направлению ЭДС возбуждения.
- ЭДС возбуждения вектора всегда отстает от напряжения на клеммах вектора.
Области применения синхронного двигателя
Области применения синхронного двигателя включают:
- Синхронный двигатель используется в основном для «коррекции коэффициента мощности», что означает увеличение коэффициента мощности системы.
- Синхронные двигатели используются для регулирования напряжения
- Синхронные двигатели обычно используются для низкоскоростных и мощных нагрузок.
- Синхронные двигатели обычно используются в воздушных и газовых компрессорах и вакуумных насосах.
- Синхронные двигатели также находят свое применение в дробилках, мельницах и мельницах.
- Они также используются в вытяжных устройствах, вентиляторах и воздуходувках.
Преимущества синхронного двигателя
Преимущества синхронного двигателя включают в себя:
- Преимущество использования синхронного двигателя заключается в возможности управления коэффициентом мощности. Синхронный двигатель с перенапряжением имеет опережающий коэффициент мощности и работает параллельно с асинхронными двигателями, тем самым улучшая коэффициент мощности системы.
- Скорость остается постоянной независимо от нагрузки синхронных двигателей. Это качество помогает в промышленных машинах, где требуется постоянная скорость независимо от нагрузки.
- Синхронные двигатели имеют более широкий воздушный зазор, чем асинхронные двигатели, что делает их механически более стабильными.
- Электромагнитная мощность линейно зависит от напряжения в синхронных двигателях.
- Синхронные двигатели обычно работают с более высоким КПД (более 90%), особенно на низких скоростях по сравнению с асинхронными двигателями.
Недостатки синхронного двигателя
К недостаткам синхронного двигателя относятся:
- Синхронные двигатели требуют возбуждения постоянного тока, которое подается от внешних источников.
- Эти двигатели не являются самозапускающимися и требуют внешнего устройства для запуска и синхронизации.
- Стоимость выходной мощности кВт обычно выше, чем у асинхронных двигателей.
- Если частота входящего питания не отрегулирована, невозможно отрегулировать скорость.
- Их невозможно запустить под нагрузкой, поскольку пусковой момент равен нулю.
- Требуются коллекторные кольца и щетки, что приводит к высоким затратам на техническое обслуживание.
- Синхронные двигатели не подходят для приложений, требующих частого запуска машин.

Читайте также:
Маховик как устройство накопления энергии, расчеты и требования к ротору
Принцип эффекта Холла – история, объяснение теории, математические выражения и приложения
Что представляет собой зажимной измеритель (ТОНГ ТЕСТЕР) - Типы, принцип работы и как работать
Синхронный моторный
Артикул категории
Содержание
Принцип работы синхронного двигателя
Если обмотки статора активированы, внутри статора возникнет вращающееся магнитное поле. Если мы представим это поле как вращающуюся пару полюсов, ненагруженный ротор будет выровнен с полем статора и будет вращаться синхронно с полем. Силы между изображенными полюсами являются радиальными и не создают крутящего момента. Если ротор был нагружен тормозной силой, он немного замедлится по отношению к полю вращения. В конце концов, ось ротора больше не будет совпадать с осью статора, а силы, возникающие между полюсами, будут создавать механический крутящий момент, противоположный тормозному крутящему моменту. Любые изменения нагрузки не приведут к изменению скорости вращения ротора (как это происходит с асинхронным двигателем).
В конце концов, ось ротора больше не будет совпадать с осью статора, а силы, возникающие между полюсами, будут создавать механический крутящий момент, противоположный тормозному крутящему моменту. Любые изменения нагрузки не приведут к изменению скорости вращения ротора (как это происходит с асинхронным двигателем).
Ротор, как на холостом ходу (без нагрузки), так и под нагрузкой, будет вращаться со скоростью, равной скорости вращения магнитного поля (синхронная скорость). Но если крутящий момент нагрузки превышает максимальный электромагнитный крутящий момент для двигателя (если угол между осями ротора и статора превышает 90 градусов), то машина потеряет синхронизацию и остановится на период времени.
Запуск синхронного двигателя
Одним из недостатков синхронизированного по времени двигателя является тот факт, что он не может запуститься самостоятельно, если обмотки статора запитаны от сети. Когда напряжение подается на статор, создается вращающая сила, которая вызывает переменный крутящий момент, действующий на ротор двигателя. Ротор не может начать свою работу из-за инерции, создаваемой ротором, так как частота колебаний крутящего момента слишком высока.
Ротор не может начать свою работу из-за инерции, создаваемой ротором, так как частота колебаний крутящего момента слишком высока.
Среднее значение пускового момента ротора синхронного двигателя ротора будет равно нулю.
Рис. 1: Среднее значение пускового момента
Существует множество способов решения этой проблемы. Один из них заключается в использовании дополнительной машины для увеличения скорости вращения ротора, входящего в состав синхронного двигателя. Работа такой машины может выполняться дополнительным асинхронным двигателем, а также двигателем постоянного тока, однако этот метод вряд ли будет использоваться в реальном мире. Другой способ запуска асинхронного двигателя — использовать тот же метод, что и для асинхронных двигателей. На полюсах ротора установлена клетка, которая обычно состоит из медных стержней, аналогичная клетке ротора синхронного двигателя с короткозамкнутым ротором. Синхронный двигатель начинается как асинхронный двигатель и в конечном итоге достигает скорости, близкой к синхронной.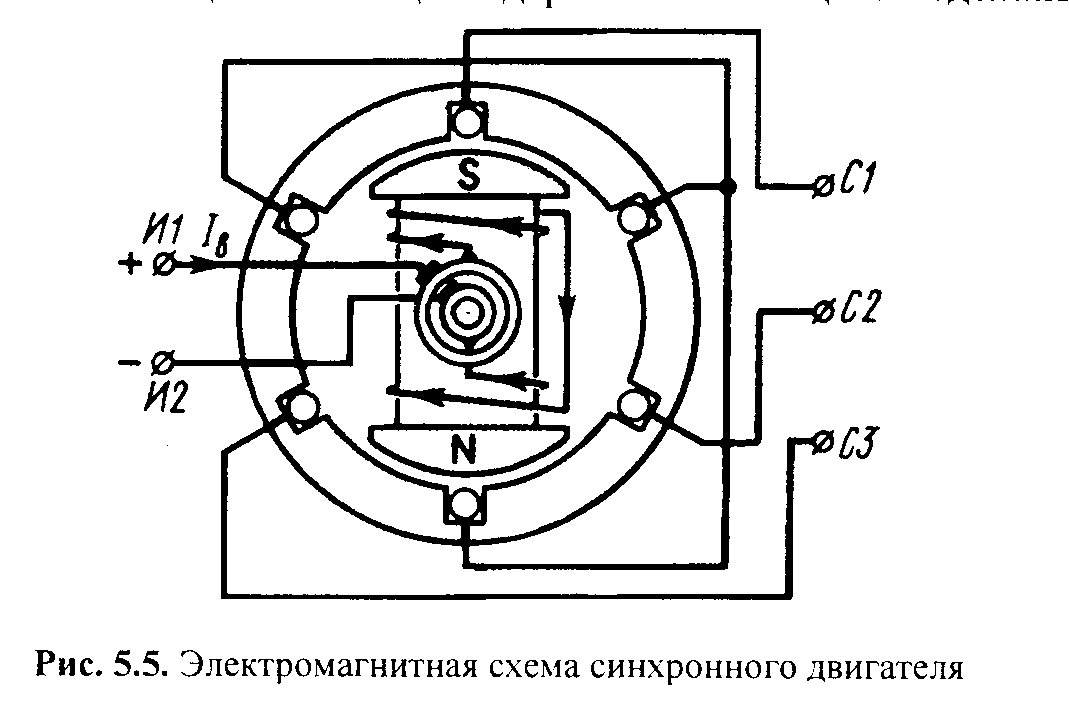 Когда он достигает этой скорости, цепь возбуждения заряжается постоянным током, что позволяет двигателю войти в режим синхронизации, поскольку он продолжает работать на синхронизированной скорости.
Когда он достигает этой скорости, цепь возбуждения заряжается постоянным током, что позволяет двигателю войти в режим синхронизации, поскольку он продолжает работать на синхронизированной скорости.
В настоящее время считается, что лучшим вариантом для пуска синхронных двигателей является использование электронных преобразователей частоты (инверторов), которые позволяют постоянно увеличивать напряжение питания обмотки статора, что обеспечивает постепенное ускорение вращения. Для двигателей с постоянными магнитами это единственный вариант.
Конструкция синхронного двигателя
Аналогичен асинхронному двигателю Этот двигатель обычно имеет переменную обмотку статора, которая создает круговое вращательное поле. Есть некоторые отличия в их роторах. В более старых конструкциях синхронных двигателей предполагается, что ротор намотан на внутренний сердечник. Он питается от щеток и контактных колец от источника постоянного или переменного тока. Роторы могут быть изготовлены двумя способами: цилиндрические роторы (со скрытыми полюсами) или роторы с открытыми полюсами.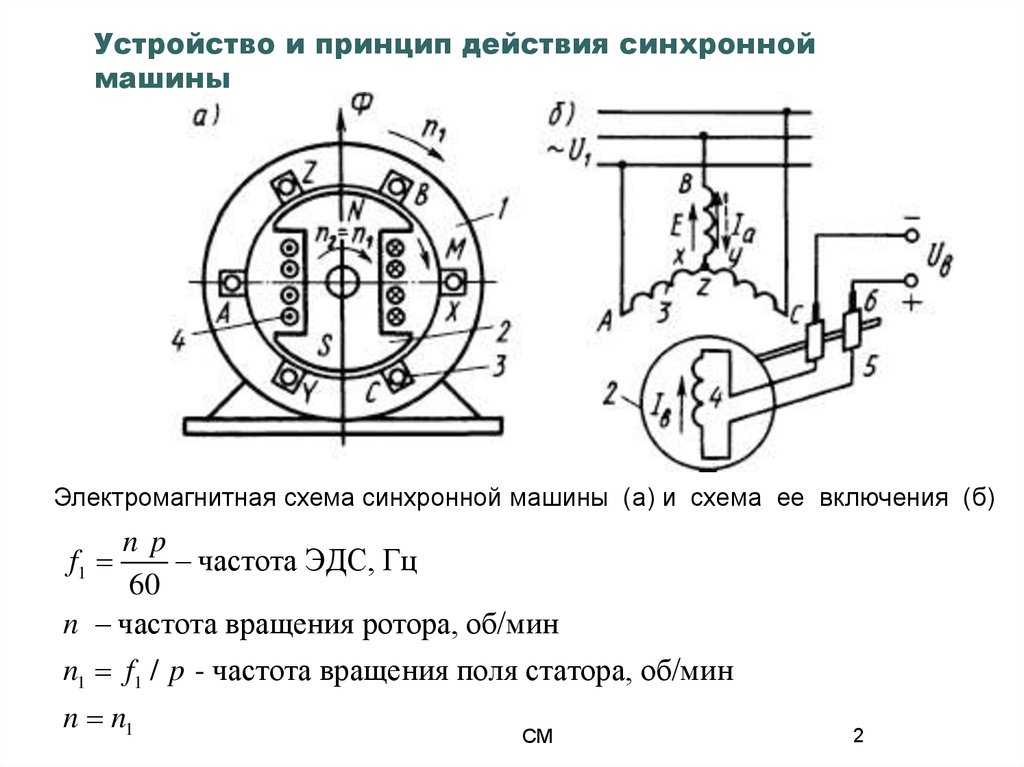
Рис. 2: Четырехполюсное открытое рабочее колесо
Каждый полюс имеет собственную обмотку вокруг сердечника полюса. Путем формирования полюсов создается соответствующее распределение индукции по окружности ротора.
Роторы с открытыми полюсами обычно используются в мощных машинах из-за их конструкции (значительно меньшая механическая прочность перед лицом гравитационных сил). Они используются в машинах, которые не имеют высоких скоростей. Наиболее популярными вариантами использования этого типа машин являются генераторы и двигатели, работающие от гидротурбин (гидрогенераторы).
Обмотка возбуждения в цилиндрическом вращающемся роторе вставляется в пазы, выфрезерованные в корпусе из стали, и закрепляется от протягивания через пазы клиньями. Обмотка — это лишь малая часть цепи ротора (около 1/3 ее части).
Эти роторы стоят дороже, чем роторы с открытым концом, однако благодаря своей превосходной механической прочности они используются в машинах с более высокими скоростями вращения. Эта модель используется, например, в высокоскоростных генераторах (турбогенераторах), которые обычно достигают скорости 3000 об/мин. Они приводятся в действие водяными или паровыми турбинами.
Эта модель используется, например, в высокоскоростных генераторах (турбогенераторах), которые обычно достигают скорости 3000 об/мин. Они приводятся в действие водяными или паровыми турбинами.
Рисунок 3: Двухполюсный цилиндрический ротор (со скрытыми полюсами)
В последнее время, однако, все чаще используются устройства, использующие магнитоэлектрическое возбуждение, в которых ротор оснащен постоянными магнитами вместо обмоток.
Магниты специальной конструкции, изготовленные из соответствующих металлических сплавов, устанавливаются на вращающийся элемент. Из-за этого крутящий момент довольно высок. может быть достигнуто при меньшем моменте инерции вращающегося ротора.
Рис. 4. Четырехполюсный ротор с радиально соединенными магнитами
Возбуждение синхронного двигателя
Возбуждение ротора
Установка обмотки в ротор для создания неизменного магнитного поля, заставляющего вращаться ротор, требует подачи тока возбуждения на вращающийся. В статоре, наоборот, расположена обмотка переменного тока. Это создает электрическое поле, которое вращает и «тянет» ротор в заданном направлении. Конечно, ротор должен быть сконструирован таким образом, чтобы количество создаваемых магнитных полюсов было равно количеству магнитных полюсов, создаваемых статором.
Это создает электрическое поле, которое вращает и «тянет» ротор в заданном направлении. Конечно, ротор должен быть сконструирован таким образом, чтобы количество создаваемых магнитных полюсов было равно количеству магнитных полюсов, создаваемых статором.
Ток возбуждения исходит из другого источника, обычно из определенной цепи, которая потребляет энергию непосредственно от выпрямителя или через генератор постоянного тока, известный как возбудитель. Возбудитель может включать, например, генератор, размещенный на общем валу вместе с возбудителем. Он соединен с ротором двигателя. Количество энергии, необходимое для стимуляции синхронного двигателя, обычно не превышает одного процента от рекомендуемой мощности двигателя. В меньших синхронных двигателях обычно встречаются конструкции, в которых обмотка возбуждения расположена в статоре, таким образом, дополнительная цепь возбуждения представляет собой магнето, а ротор — якорь.
Во многих новых синхронных двигателях для упрощения их конструкции постоянные магниты, также называемые постоянными магнитами, размещаются на роторе, а не на обмотке, которая требует подачи постоянного тока. Чаще всего это неодимовые магниты. Эти магниты размещаются (приклеиваются) к внешней стороне двигателя. Эта конструкция гарантирует, что ротор имеет высокий процент вращающего момента, который может быть достигнут, и минимальное значение этого момента инерции вращающегося ротора. Двигатели с такой конструкцией называются PMSM (Permanent Magnetic Synchronous Motor), то есть синхронными двигателями с постоянными магнитами.
Чаще всего это неодимовые магниты. Эти магниты размещаются (приклеиваются) к внешней стороне двигателя. Эта конструкция гарантирует, что ротор имеет высокий процент вращающего момента, который может быть достигнут, и минимальное значение этого момента инерции вращающегося ротора. Двигатели с такой конструкцией называются PMSM (Permanent Magnetic Synchronous Motor), то есть синхронными двигателями с постоянными магнитами.
Другим типом синхронных двигателей являются реактивные двигатели. Они имеют разомкнутые полюса, но, в отличие от СДПМ, их роторы не имеют проводов возбуждения. Для перемещения ротора они используют свой момент сопротивления, возникающий при отсутствии возбуждения. Он генерируется приложением электрического поля к магнитно-асимметричному ротору, состоящему из ферромагнитного материала. Ротор, на который действует момент сопротивления, «пытается найти» такое оптимальное положение по отношению к статору, при котором сопротивление минимально.
В области индустриализации часто встречаются двигатели, называемые гистерезисными, в которых используется принцип магнитного гистерезиса. Роторы этих двигателей полностью состоят из материалов с большой петлей гистерезиса. Крутящий момент двигателей определяется размером ротора, а также потерями в блоке гистерезиса. Двигатели с гистерезисом обеспечивают бесшумную работу, высокий начальный крутящий момент даже при малых токах и плавную синхронизацию. Но они становятся менее популярными из-за своей неэффективности.
Роторы этих двигателей полностью состоят из материалов с большой петлей гистерезиса. Крутящий момент двигателей определяется размером ротора, а также потерями в блоке гистерезиса. Двигатели с гистерезисом обеспечивают бесшумную работу, высокий начальный крутящий момент даже при малых токах и плавную синхронизацию. Но они становятся менее популярными из-за своей неэффективности.
Пуск синхронного двигателя
Наиболее существенным недостатком синхронных двигателей является отсутствие у них пускового момента. Это связано с тем, что напряжение, которое прикладывается к двигателю, создает электромагнитное поле, которое вращается и создает колебательный крутящий момент. Это связано с тем, что напряжение, которое прикладывается к статору, создает электромагнитное поле, которое вращается, создавая переменный крутящий момент, который заставляет ротор «тянуться» в одну сторону, прежде чем двигаться в противоположную. Из-за частоты этого изменения крутящего момента ротор не может двигаться, и средний крутящий момент равен нулю.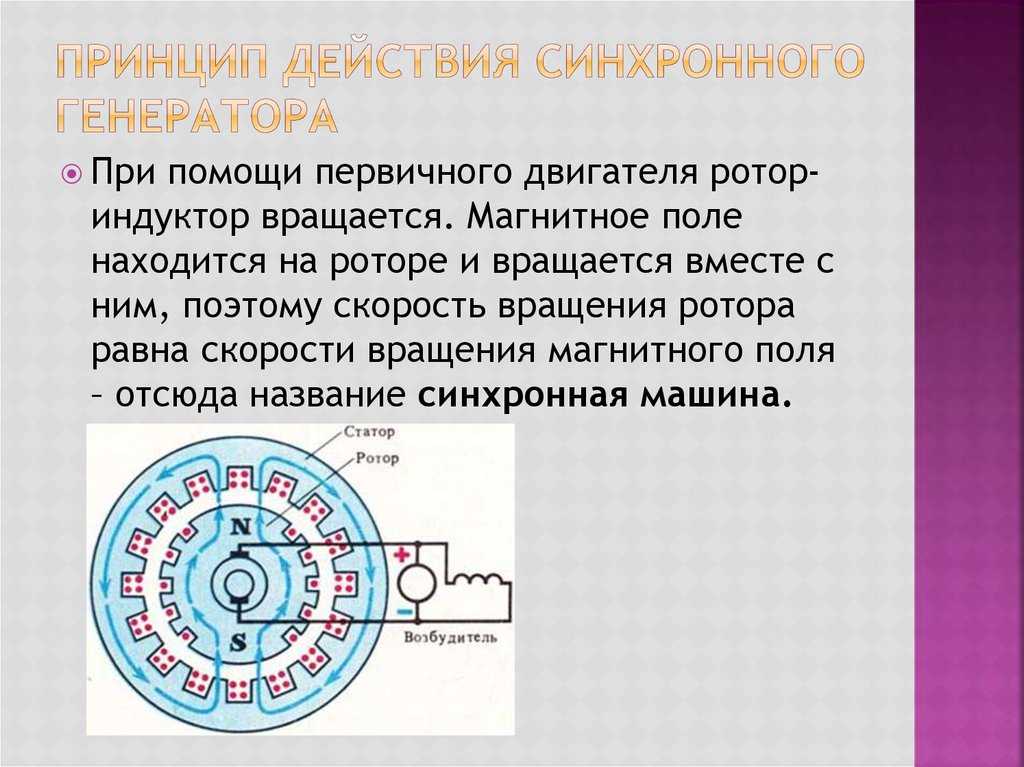
Есть много решений этой проблемы. Самым простым решением является использование другого пускового двигателя, однако в промышленных условиях этот вариант нецелесообразен. На самом деле метод, используемый в асинхронных двигателях, используется для запуска синхронного двигателя. Вторая клетка стартера, состоящая из медных стержней, аналогичная клеткам, которые используются в короткозамкнутых роторах асинхронных двигателей, помещается внутри полюсов ротора. Синхронный двигатель запускается как асинхронный двигатель и, когда он находится на скорости, близкой к синхронной скорости, активируется. Включен источник питания постоянного тока для цепи, управляющей им. Из-за этого ротор синхронизируется с вращающимся магнитным полем (входит в синхронизацию), которое продолжает двигаться синхронно.
Второй и наиболее часто используемый в системах автоматизации способ пуска синхронного двигателя можно описать как частотный пуск. При этом применяются преобразователи частоты (инверторы), позволяющие постепенно увеличивать частоту питающего напряжения в обмотках статора. Это позволяет постепенное и систематическое ускорение вращения. В случае двигателей PMSM с постоянными магнитами это единственный метод, который работает в промышленных условиях.
Это позволяет постепенное и систематическое ускорение вращения. В случае двигателей PMSM с постоянными магнитами это единственный метод, который работает в промышленных условиях.
Другой, несколько более старый метод управления частотой заключается в использовании синхронных генераторов, питающих обмотки якоря запускаемого двигателя. Скорость вращения, а, следовательно, и генератора постепенно увеличивают от нулевой до синхронной скорости, что позволяет запустить двигатель аналогично работе инвертора.
Защита синхронных двигателей
Электрические асинхронные и синхронные машины большой мощности обычно защищены от долговременной (тепловой) перегрузки, а также от максимальной (мгновенной) перегрузки и других колебаний напряжения питания, которые могут повредить их систему привода или их самих. Необходимые защиты, а также диапазоны настройки параметров отключения должны быть указаны на странице «Рабочие данные машины», прилагаемой к документам, поставляемым изготовителем вместе с машиной. Защита должна охватывать машину от:
Защита должна охватывать машину от:
- Перегрузки по току и превышение допустимой рабочей температуры,
- Автоматический запуск после временного отключения питания и восстановление питания после обрыва фазы,
- Снижение сопротивления системы изоляции обмоток ниже предельного значения.
Из вышеизложенного видно, что существует множество требований к защите электрических устройств. Они не всегда эффективны в рабочих ситуациях, так как недостаточно внимания уделяется диагностике, обслуживанию и проверке правильности работы системы защиты.
Эта защита не может работать, если контакты реле в системе защиты загрязняются или окисляются, а когда они это делают из-за короткого замыкания, они не могут подать сигнал на отключение выключателя. На одном сталелитейном заводе один из них, двигатель постоянного тока прокатного стана мощностью 1 МВт и частотой вращения 1000 об/мин, вышел из строя и вышли из строя все секции коллектора. До поломки мотор эксплуатировался 10 лет. Двигатель был защищен тремя действующими предохранителями.
Двигатель был защищен тремя действующими предохранителями.
- при частоте вращения 1,2 Нмакс,
- при 2,5IN и токе якоря 2,5IN и
- при потере тока возбуждения.
Двигатель вышел из строя из-за аварийного отключения тока возбуждения. Если бы сработала одна из перечисленных защит, то этот двигатель остановился бы. Существует также задокументированный случай совершенно нового печного трансформатора мощностью 40 МВА 110 кВ/(514 304) В, который был полностью разрушен всего за три месяца использования. Причиной отказа стало включение выключателей обмотки управления, создавшее внутреннее замыкание на обмотку. Реле, предназначенное для прекращения срабатывания этого выключателя, включенного при данной ситуации в цепи трансформатора, имело контакты, загрязненные шамотной пылью, обнаруженной на линии разливки непрерывной стали. Реле блокировки работало, однако не могло выполнять свою работу. Что касается системы привода, электрические машины работают в установившемся режиме и в электромеханических переходных процессах. Характерными переходными процессами являются синхронный пуск двигателей переменного тока. Каждый электродвигатель спроектирован так, чтобы конструктивно справляться с переходными процессами в электромагнитной энергии, возникающими в начале работы. В условиях установившегося режима работы возможны перепады напряжения в сети, т.е. вызванные молнией, вызывают срабатывание AVR или APV. АПВ и АВР. Эти сбои чрезвычайно опасны из-за того, что время потери питания составляет около одной секунды. Выключение и повторное включение напряжения создает электромагнитно-нестабильные условия в двигателях, что гораздо опаснее, чем начало процесса.
Характерными переходными процессами являются синхронный пуск двигателей переменного тока. Каждый электродвигатель спроектирован так, чтобы конструктивно справляться с переходными процессами в электромагнитной энергии, возникающими в начале работы. В условиях установившегося режима работы возможны перепады напряжения в сети, т.е. вызванные молнией, вызывают срабатывание AVR или APV. АПВ и АВР. Эти сбои чрезвычайно опасны из-за того, что время потери питания составляет около одной секунды. Выключение и повторное включение напряжения создает электромагнитно-нестабильные условия в двигателях, что гораздо опаснее, чем начало процесса.
Применение синхронных двигателей
Синхронные двигатели с сервоприводом в основном предназначены для спринтеров, предназначенных для конкретных работ. Низкий момент инерции обеспечивает высочайший уровень динамики и эффективного управления. Эти параметры позволяют использовать синхронные двигатели в качестве манипуляторов и рабочих органов машин, которые обычно являются многоосевыми машинами.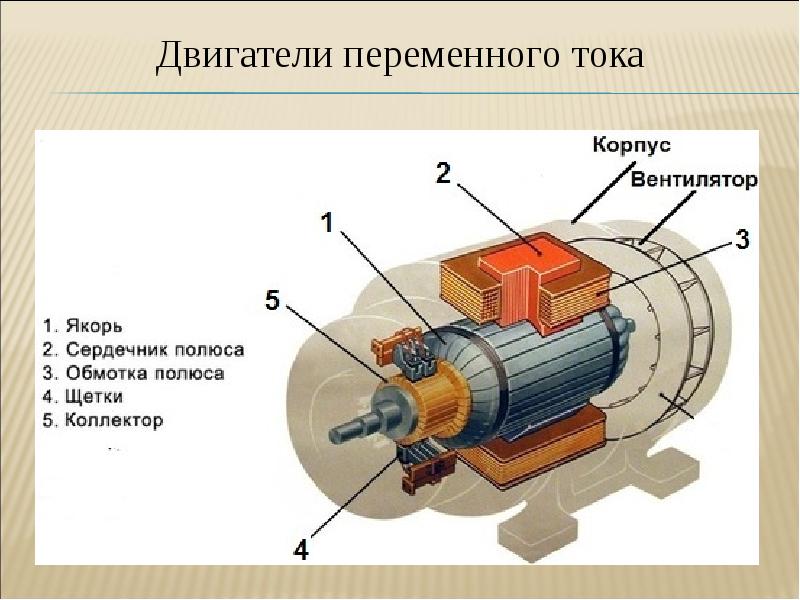
Транспортные средства для отдыха и спорта – это транспортные средства, в которых масса всего транспортного средства является важным фактором. Двигатели PMSM имеют гораздо меньшую массу по сравнению с двигателями постоянного тока и асинхронными двигателями, которые имеют аналогичные тяговые характеристики, что делает их идеальными для использования в этих типах транспортных средств. Автомобили для отдыха и спорта с электроприводом становятся все более популярными и находят все большее применение благодаря своим преимуществам.
Потери синхронного двигателя примерно в два раза больше, чем у асинхронного двигателя. Когда речь идет о бытовом использовании, уровень шума, производимого двигателем во время работы, является важным фактором, определяющим его характеристики. Испытания показывают, что шум, производимый открытым синхронным двигателем, примерно на 10 дБ меньше, чем шум, создаваемый асинхронным двигателем с воздушным охлаждением. Сравнение одних и тех же (с аналогичной мощностью двигателя) синхронных двигателей с постоянными магнитами и безредукторных асинхронных двигателей показывает, что они на 50 процентов тяжелее, весят на 20 процентов больше и имеют примерно на 3 процента меньший КПД, чем синхронные двигатели.