
Электродвигатель постоянного тока
Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока.
Электродвигатель постоянного и переменного тока
История изобретения
Электродвигатель Якоби.
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле. Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики.
Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики.
Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом:
Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.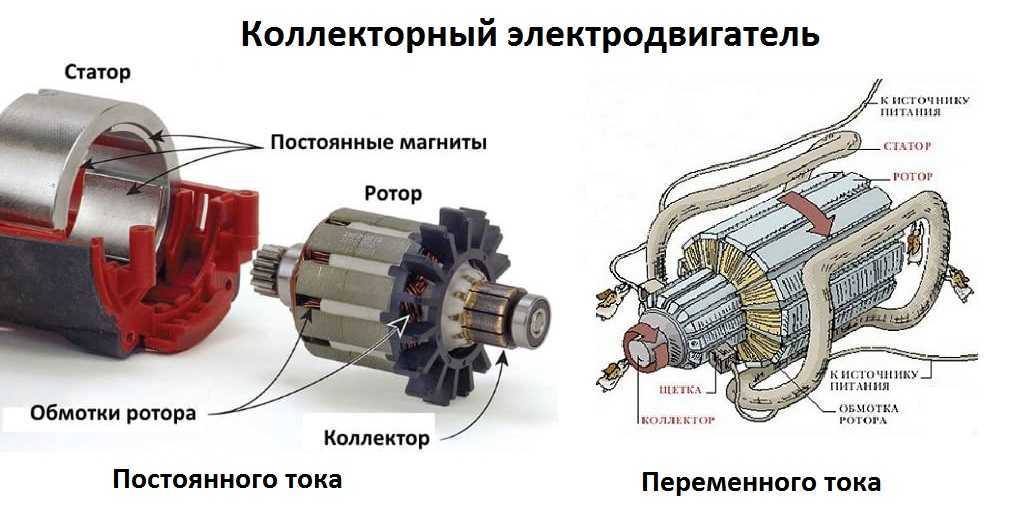
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины
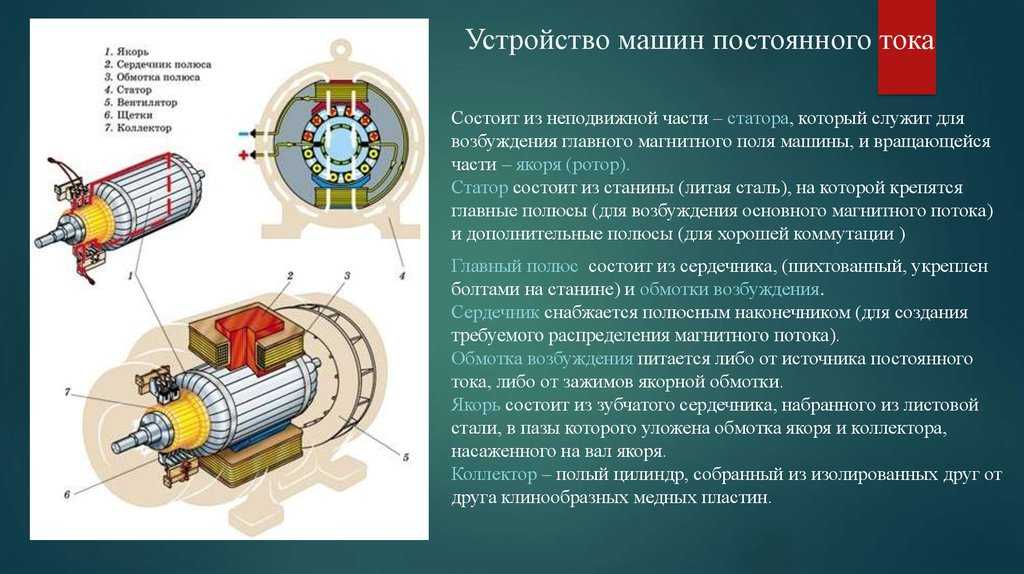
Устройство и принцип работы
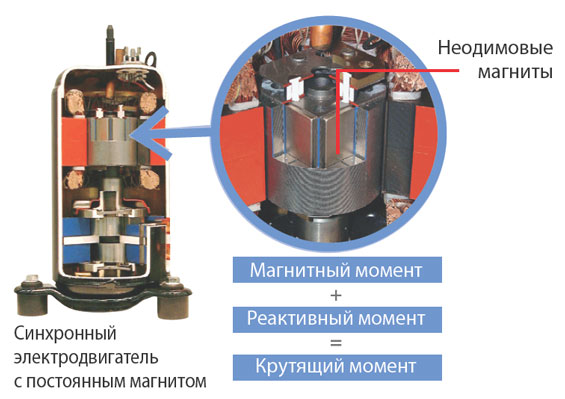
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.


Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.
- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис. 1).
- Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.

Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Пусковые токи
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
- защитный автомат линии не выдержит тока и отключится;
- провода обмотки сгорят от перегрузки;
- секторы переключения на коллекторе приварятся от перегрева.
Поэтому такое решение можно назвать скорее рискованной полумерой.
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
- Сначала ток постепенно поднимается до пускового значения.
- После «сдвига» с места значение тока резко падает и снова плавно поднимается «подгоняя вращение вала».
- После подъема до предельного значения сила тока снова снижается и «подгоняется».

Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т.
- Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.

Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
Самый простой щёточно-коллекторный узел
Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
Основные достоинства:
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
Главные недостатки:
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Принцип работы двигателя постоянного тока и его динамические характеристики
Обмотка возбуждения ДПТ, расположенная на статоре, находится под постоянным напряжением, чаще всего 110 или 220 В.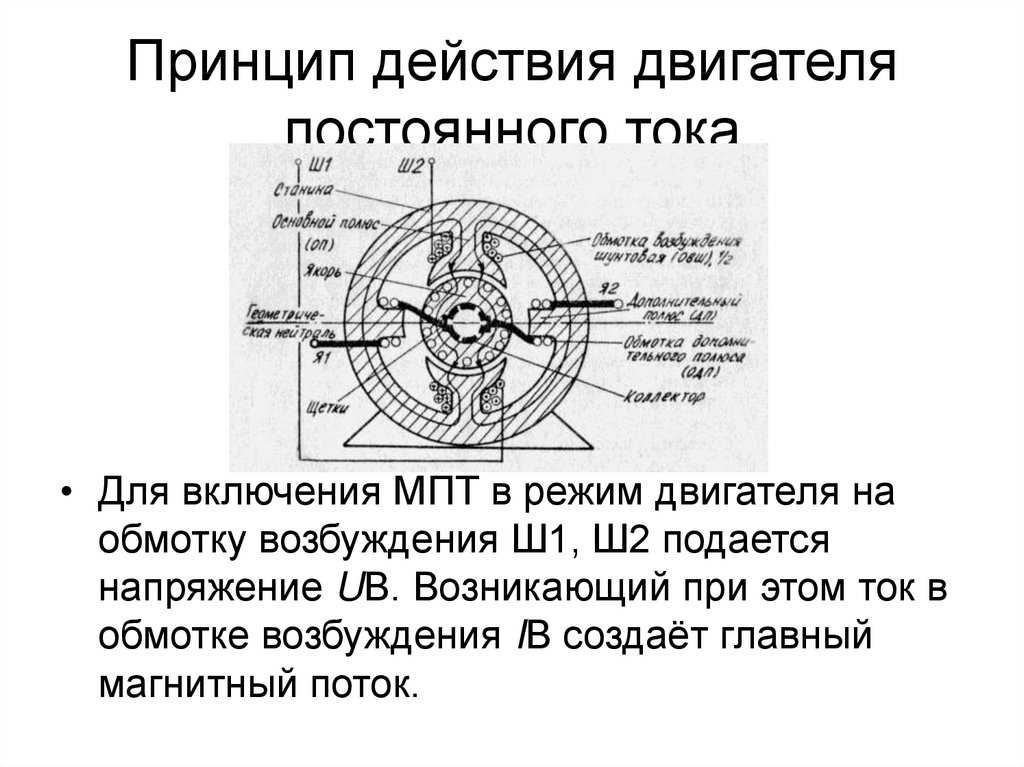 Оно формирует магнитное поле возбуждения. Правильно рассчитанное поле возбуждения — это основа надежной работы двигателя постоянного тока. Вращающий момент электродвигателя создается при помощи силы Ампера. В зависимости от способа возбуждения, двигатели делятся на несколько категорий. Наиболее простой вариант предусматривает питание обмотки от независимого источника. Второй вариант – параллельный способ возбуждения. В этом случае речь идет о том, что обмотка возбуждения подключается параллельно источнику питания якорной обмотки.
Оно формирует магнитное поле возбуждения. Правильно рассчитанное поле возбуждения — это основа надежной работы двигателя постоянного тока. Вращающий момент электродвигателя создается при помощи силы Ампера. В зависимости от способа возбуждения, двигатели делятся на несколько категорий. Наиболее простой вариант предусматривает питание обмотки от независимого источника. Второй вариант – параллельный способ возбуждения. В этом случае речь идет о том, что обмотка возбуждения подключается параллельно источнику питания якорной обмотки.
Отличие последовательного типа возбуждения от параллельного заключается в способе подключения обмотки. Завершает список существующих способов возбуждения — смешанное возбуждение. Вне зависимости от модели, запуск двигателя постоянного тока требует определенного превышения стартового напряжения над номинальным. Снизить вероятность преждевременного выхода устройства из строя поможет ступенчатый реостат. Он обеспечивает плавность запуска. Более современным способом обеспечения плавности пуска, управления и регулировкой скорости является тиристорный регулятор оборотов двигателя постоянного тока Если говорить о электродвигателях постоянного тока в целом, список их преимуществ выглядит следующим образом:
- линейный тип характеристик;
- частота вращения зависит от нагрузки на валу и величины напряжения якоря;
- возможность регулировать частоту вращения;
- значительный пусковой момент;
- незначительные габариты.

Для того, чтобы в полной мере оценить преимущества и возможности электродвигателя постоянного тока, необходимо совместно с ним использовать качественный тиристорный привод. Такие производит, например, фирма «Звезда Электроника» www.zvezda-el.ru
Также необходим грамотный подбор электродвигателя. Определенную помощь в этом окажут следующие рекомендации. Класс изоляции – не должен быть ниже F. Повышенное внимание уделяется разрешенному температурному диапазону. Это значит, что для слишком жаркой или холодной температуры окружающей среды нельзя использовать идентичную модель. Помимо этого, значение имеют следующие характеристики:
- высота оси;
- номинальное напряжение якоря;
- номинальная мощность и момент;
- номинальное напряжение и ток возбуждения;
- максимальная частота вращения;
- предельная скорость работы;
- КПД;
- высота установки;
- тип установленной системы охлаждения.
Перед тем как сделать выбор в пользу той или иной модели, формируется техническое задание. В нем перечисляются все требования к двигателю постоянного тока. На основании составленного документа осуществляется подбор агрегата. Его номинальная мощность должна на 15-20% превышать показатели, указанные в техническом задании. Это снизить вероятность преждевременной поломки.
В нем перечисляются все требования к двигателю постоянного тока. На основании составленного документа осуществляется подбор агрегата. Его номинальная мощность должна на 15-20% превышать показатели, указанные в техническом задании. Это снизить вероятность преждевременной поломки.
20/02/2022
Выключатели автоматические 250А производства КЭАЗ »
20/02/2022
Пускатели электромагнитные КЗЭА производства Кашинского завода электроаппаратуры »
22/08/2018
Современные и оригинальные трафареты из листовых материалов »
Что такое двигатель постоянного тока — конструкция, тип, принцип работы, регулирование скорости
Что такое двигатель постоянного тока?
Устройство, преобразующее электрическую энергию в механическую. В современном мире техники и технологий двигатель постоянного тока (двигатель постоянного тока) имеет широкий спектр применения. Двигатели постоянного тока можно найти везде, от электробритвы до автомобилей. Различные типы двигателей постоянного тока используются в зависимости от применения, чтобы приспособиться к этому широкому диапазону приложений.
Различные типы двигателей постоянного тока используются в зависимости от применения, чтобы приспособиться к этому широкому диапазону приложений.
Каков принцип работы двигателя постоянного тока?
Двигатель постоянного тока Принцип работы : Когда проводник с током помещается в магнитное поле, на него действует механическая сила.
Как определить направление создаваемой силы?
Направление силы, создаваемой , определяется правилом левой руки Флеминга.
Что такое правило левой руки Флеминга?
Правило левой руки Флеминга : Когда указательный палец, средний палец и большой палец левой руки расположены взаимно перпендикулярно друг другу, тогда большой палец указывает направление магнитной силы, указательный палец дает направление магнитного поля, а средний палец дает направление тока.
Величина силы определяется как
F = BIL Sinθ
B для магнитного поля, I для тока, L для длины проводника в магнитном поле, θ представляет собой угол между магнитным полем и током
What is Back ЭМП?
При вращении якоря проводники также пересекают линию магнитного потока и, следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках якоря возникает ЭДС, противоположное направлению тока якоря .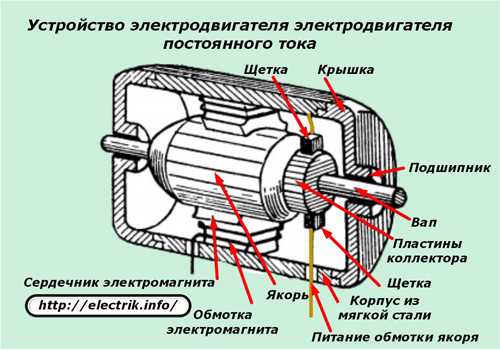 Это известно как Обратная ЭДС
Это известно как Обратная ЭДС
Обратная ЭДС прямо пропорциональна скорости двигателя
Магнитный поток является произведением среднего значения магнитного поля и перпендикулярной площади, через которую оно проходит
Первый закон электромагнитной индукции Фарадея
Всякий раз, когда есть относительное движение между проводником и магнитным полем изменяется потокосцепление с катушкой, и это изменение потока индуцирует напряжение на катушке
2-й закон Фарадея об электромагнитной индукции
Утверждается, что величина ЭДС, индуцированной в катушке, равна скорости изменения потока, связанного с катушкой.
Потокосцепление катушки является произведением числа витков в катушке и потока, связанного с катушкой
Значение противо-ЭДС
Предположим, что нагрузка двигателя внезапно снижается, тогда потребуется список запасов по сравнению с настоящим докладом . Таким образом, ток доступа будет иметь тенденцию к увеличению скорости двигателя, но обратная ЭДС, пропорциональная скорости двигателя, также увеличивается, тем самым уменьшая ток якоря, а крутящий момент, пропорциональный току якоря, будет уменьшаться до тех пор, пока не станет достаточным для нагрузки.
Аналогично для случая повышенной нагрузки.
Части двигателя постоянного тока
Статор – Неподвижная часть двигателя, состоящая из обмотки возбуждения и получающая электропитание
Ротор – Вращающаяся часть двигателя
Другие части: двигатель называется желтком, он обеспечивает покрытие внутренней части двигателя, а также поддерживает якорь, он состоит из чугуна или стали.

Типы обмоток
Имеется два типа обмоток
| Намотка внахлест | Волновая обмотка | ||
| 1. Последовательные катушки перекрывают друг друга | 1. Конец одной катушки соединяется с началом другой катушки той же полярности, что и у первой катушки. | ||
| 2. Все группы полюсов катушки, создающей ЭДС одного направления в любой момент времени, соединены щетками параллельно. | 2. Катушки с током в одном направлении соединены в одну последовательную цепь, а катушки с током в противоположном направлении в другую последовательную цепь. | ||
| 3. Количество параллельных путей = количество полюсов | 3. Количество параллельных путей = 2 | ||
| 4. Необходимое количество щеток = количество полюсов | 4. Количество щеток = 24 |
Потери в двигателе постоянного тока
1.
 Cu – потери / электрические потери
Cu – потери / электрические потериЭто потери из-за сопротивления в обмотке и включают потери в обмотке якоря, потери в обмотке возбуждения и потери на контакте щеток.
2. Fe – потери / потери в сердечнике
Состоят из двух потерь
A) Гистерезисные потери
Возникают в обмотках якоря из-за перемагничивания сердечника.
B) Вихревые потери
В соответствии с законом электромагнитной индукции Фарадея, благодаря относительному движению между сердечником якоря и магнитным потоком, в сердечнике индуцируется ЭДС, которая обеспечивает поток заряда на тело из-за проводимости сердечника . Этот ток бесполезен, и эти потери называются потерями на вихревые токи. Его можно свести к минимуму за счет ламинированного сердечника.
3. Механические потери
Состоит из потерь на трение между подшипниками и коллектором.
4. Бродячие потери
Это потери, вызванные коротким замыканием катушки, искажением потока, неточностью конструкции машины и другими потерями, которые трудно найти.
Типы двигателей постоянного тока
Двигатель постоянного тока с независимым возбуждением
Обмотки возбуждения и якоря в двигателе постоянного тока с независимым возбуждением поставляются отдельно, как следует из названия. Ток якоря не проходит через обмотки возбуждения в двигателях постоянного тока такого типа, поскольку обмотки возбуждения активируются отдельным внешним источником постоянного тока, как показано на рисунке рядом.
T g = K a φ I a — уравнение крутящего момента для двигателя постоянного тока. В этом сценарии крутящий момент можно регулировать, изменяя поток возбуждения φ, который не зависит от тока якоря I a .
Двигатель постоянного тока с постоянными магнитами
В этом типе двигателя, несмотря на наличие обмотки возбуждения, у нас есть постоянные магниты для создания магнитного поля. Обмотка якоря двигателя постоянного тока с постоянными магнитами (также известного как двигатель постоянного тока с постоянными магнитами) аналогична обмотке обычного двигателя, хотя обмотки возбуждения присутствуют не всегда. Поток поля создается радиально намагниченными постоянными магнитами, расположенными на внутренней периферии сердечника статора в таких двигателях постоянного тока.
Поток поля создается радиально намагниченными постоянными магнитами, расположенными на внутренней периферии сердечника статора в таких двигателях постоянного тока.
Двигатель постоянного тока с самовозбуждением
В случае двигателя постоянного тока с самовозбуждением обмотка возбуждения соединена с обмоткой якоря последовательно, параллельно или частично последовательно, частично параллельно. Двигатели постоянного тока с самовозбуждением можно разделить на следующие категории:
- Двигатель постоянного тока с шунтовой обмоткой
- Двигатель постоянного тока с последовательной обмоткой
- Двигатель постоянного тока с комбинированной обмоткой
Двигатель постоянного тока с шунтирующей обмоткой
В этом случае обмотка возбуждения соединена параллельно с обмотка якоря. Это двигатель с постоянной скоростью.
Двигатель постоянного тока с последовательной обмоткой
В этом типе двигателя обмотка возбуждения соединена последовательно с обмоткой якоря. Его скорость зависит от нагрузки.
Его скорость зависит от нагрузки.
Двигатель постоянного тока с комбинированной обмоткой
Обмотка возбуждения представляет собой комбинацию двигателя постоянного тока с параллельной и последовательной обмоткой. Он имеет два типа: накопительный двигатель постоянного тока и дифференциальный двигатель постоянного тока.
Накопительный двигатель постоянного тока
В накопительном комбинированном двигателе постоянного тока обмотка возбуждения способствует потоку обмотки якоря.
Дифференциальный комбинированный двигатель постоянного тока
В дифференциальном комбинированном двигателе постоянного тока обмотка возбуждения и обмотка якоря расположены таким образом, что поток обмотки возбуждения противодействует потоку обмотки якоря.
Поскольку чистый поток, созданный в этом сценарии, меньше исходного потока, его практическая полезность ограничена.
Двигатель постоянного тока с коротким шунтом
Двигатели постоянного тока с коротким шунтом, или, точнее, двигатели постоянного тока с короткой обмоткой шунтового типа, имеют шунтирующую обмотку возбуждения, параллельную обмотке якоря, а не последовательную обмотку возбуждения.
Двигатель постоянного тока с длинным шунтом
Двигатели постоянного тока с длинной обмоткой шунтового типа или просто двигатели постоянного тока с длинным шунтом имеют шунтирующую обмотку возбуждения, параллельную как обмотке якоря, так и последовательной обмотке возбуждения.
Управление скоростью двигателя постоянного тока
- Метод управления потоком
- Метод управления якорем
- Метод управления напряжением
Метод управления потоком
В этом методе магнитный поток, создаваемый обмоткой возбуждения, изменяется. Поскольку магнитный поток, создаваемый в обмотке возбуждения, пропорционален току, протекающему через нее. Таким образом, магнитный поток можно изменять, изменяя ток, что делается с помощью переменного резистора, включенного последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор установлен на минимум, через него протекает номинальный ток и скорость двигателя нормальная. Но когда сопротивление увеличивается, через обмотку возбуждения протекает меньший ток, поэтому создается меньший поток, поскольку скорость двигателя обратно пропорциональна создаваемому потоку, число оборотов в минуту увеличивается.
Но когда сопротивление увеличивается, через обмотку возбуждения протекает меньший ток, поэтому создается меньший поток, поскольку скорость двигателя обратно пропорциональна создаваемому потоку, число оборотов в минуту увеличивается.
Метод управления якорем
В этом методе скорость двигателя регулируется путем управления сопротивлением якоря для контроля падения напряжения на якоре. Когда переменный резистор на минимуме, скорость двигателя нормальная. Но при увеличении сопротивления напряжение на якоре уменьшается, что снижает скорость двигателя.
Метод управления напряжением
В этом методе обмотка возбуждения получает фиксированное напряжение, а якорь получает переменное напряжение. Это делается с помощью:
A) Множественное управление напряжением
В этом методе шунтирующее поле связано с фиксированным возбуждающим напряжением, а на якорь подаются различные напряжения. С помощью соответствующего распределительного устройства можно изменить напряжение на якоре.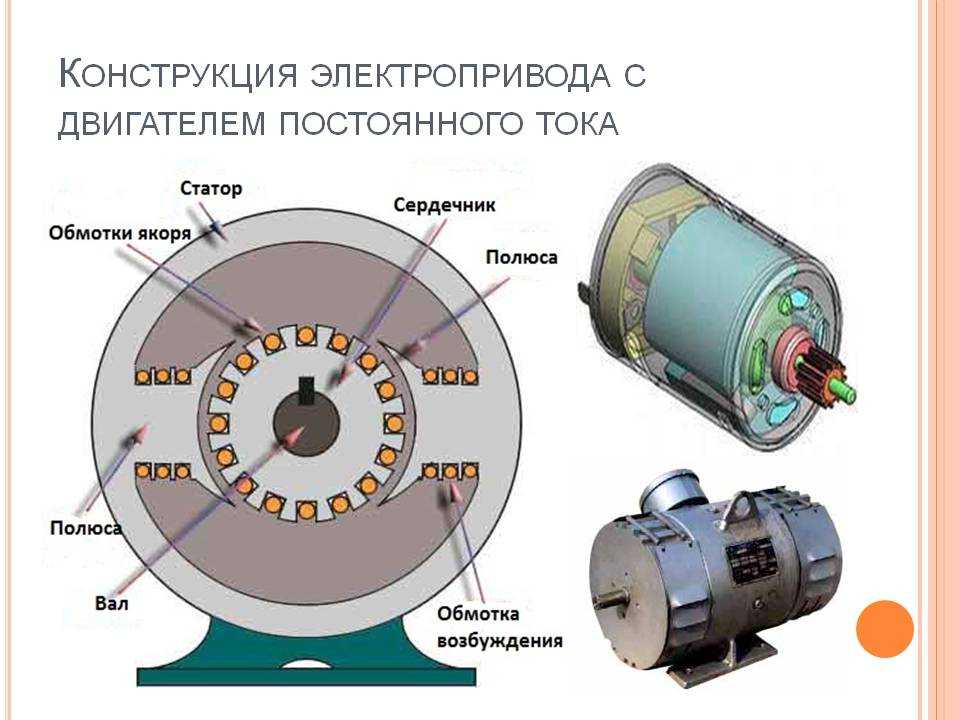 Напряжение на якоре примерно пропорционально скорости.
Напряжение на якоре примерно пропорционально скорости.
B) Система Ward-Leonard
Этот метод применяется, когда требуется точное управление скоростью двигателя (например, электрические экскаваторы, лифты и т. д.). Система управления скоростью Уорда-Леонарда основана на методе управления напряжением якоря. M — главный двигатель постоянного тока, скорость которого необходимо регулировать, а G — отдельно возбуждаемый генератор постоянного тока в этой системе. Трехфазный приводной двигатель, который может быть асинхронным или асинхронным, приводит в движение генератор G. Комбинация приводного двигателя переменного тока и генератора постоянного тока называется комплектом двигатель-генератор (MG).
Подробнее : Принцип работы дизельного генератора
Читайте также : ТОП 50+ часто задаваемых вопросов по двигателям внутреннего сгорания
Рекомендуем прочитать : Центробежный насос | Части | Работа | Диаграмма
Ознакомьтесь с другими важными темами
Главная Двигатель внутреннего сгорания Электрооборудование Важные PDF-файлы Котлы Синергия Морской экзамен Военно-морская арка Вопросы для собеседования Разница между типами насосов Типы клапанов MEO Class 4 Вспомогательные машины
Принцип работы двигателя постоянного тока Важные понятия и советы
Что такое двигатель постоянного тока?
Двигатель постоянного тока (двигатель постоянного тока) определяется как электрическая машина, преобразующая электрическую энергию в механическую. Исходя из приведенного выше определения, можно сделать вывод, что двигатель постоянного тока определяется как электродвигатель, работающий на постоянном токе. Двигатель постоянного тока — это электродвигатель, работающий от постоянного тока (DC), в отличие от асинхронного двигателя, работающего от переменного тока.
Исходя из приведенного выше определения, можно сделать вывод, что двигатель постоянного тока определяется как электродвигатель, работающий на постоянном токе. Двигатель постоянного тока — это электродвигатель, работающий от постоянного тока (DC), в отличие от асинхронного двигателя, работающего от переменного тока.
Он действует по принципу Лоренца, согласно которому «проводник с током, помещенный в магнитное и электрическое поле, испытывает силу». Эта сила известна как сила Лоренца. Правило левой руки Флеминга определяет направление механической силы.
Принцип работы или принцип работы двигателя постоянного тока
Работа двигателя постоянного тока (DC) основана на том принципе, что когда проводник с током помещается в магнитное поле, на проводник действует механическая сила. Направление силы определяется правилом левой руки Флеминга, а величина этой силы определяется выражением:
F= BIL Ньютоны
Где B — магнитное поле, I — ток, а L — длина проводника.
Согласно правилу левой руки Флеминга, если расположить большой, указательный и средний пальцы левой руки перпендикулярно друг другу, то большой палец будет указывать в направлении магнитной силы, указательный — в направлении магнитной силы. магнитное поле, а средний палец будет указывать в направлении тока.
Правило левой руки Флеминга
Основная функция работы двигателя
Магниты возбуждаются, что приводит к чередованию северного и южного полюсов.
Токи передаются по якорным проводникам.
Полюса и часть двигателя постоянного тока
Все проводники северного полюса пропускают ток в одном направлении, а все проводники южного полюса пропускают ток в противоположном направлении. Токи переносятся в плоскость бумаги по проводникам якоря под полюсом N (обозначены, как на рисунке). Проводники под S-образным полюсом переносят токи от плоскости бумаги (показаны на рисунке).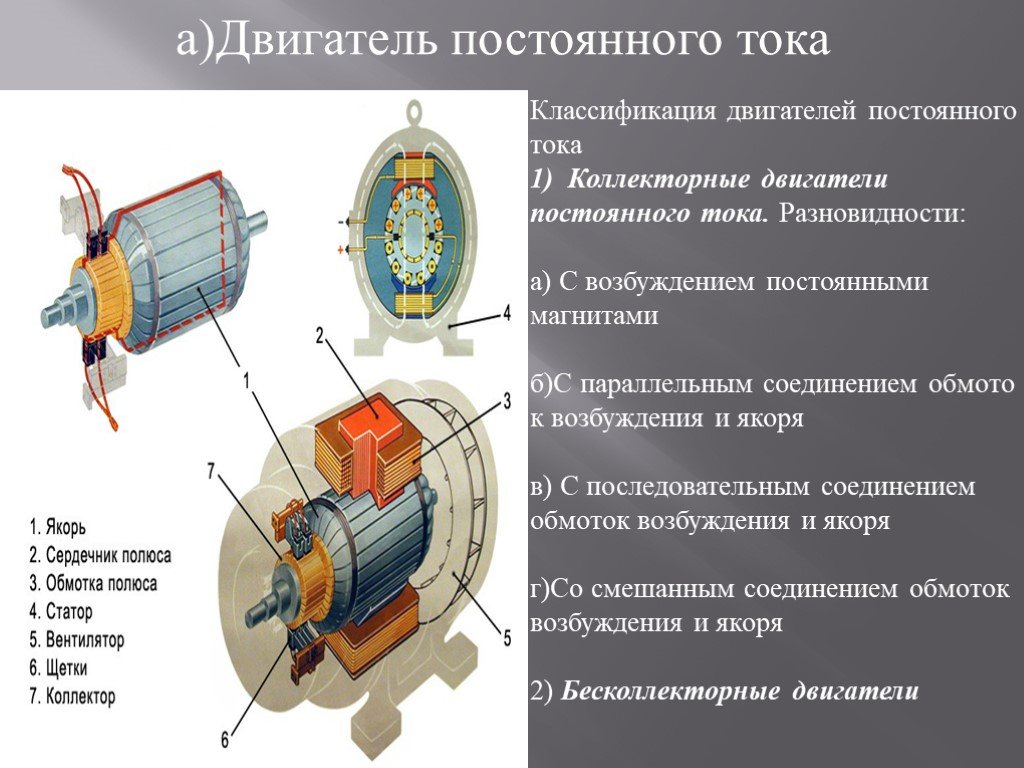
На каждый проводник якоря действует механическая сила, потому что он несет ток и находится в магнитном поле. Используя правило левой руки Флеминга, становится ясно, что сила, действующая на каждый проводник, стремится повернуть якорь против часовой стрелки. Все эти силы в совокупности создают движущий момент, заставляющий якорь вращаться.
Простой двигатель постоянного тока
Сечение двигателя постоянного тока
Ток в проводнике меняется на противоположный, когда он движется с одной стороны щетки на другую. В то же время на него влияет следующий полюс, имеющий противоположную полярность. В результате направление силы на проводнике остается постоянным. Следует отметить, что функция коммутатора в двигателе такая же, как у коммутатора в генераторе. Это помогает развивать непрерывный и однонаправленный крутящий момент за счет изменения направления тока в каждом проводнике при переходе от одного полюса к другому.
Применение двигателя постоянного тока
Двигатель постоянного тока — это тип двигателя, в котором используется постоянный магнит для создания необходимого магнитного поля. Поскольку этот двигатель не нуждается в управлении скоростью, он используется в таких приложениях, как:
Вайочная машина
Автомобили в качестве стартового двигателя
Персональные компьютерные диски
TOYS
900813 903 9013 903 903 903 9013 9013 903 903 903 903 903 903 903 903 903 9039.303.
- 3 903 903 9068.
Вентиляторы отопителей и кондиционеров.
Принцип работы электродвигателя
Принцип действия электродвигателя заключается в том, что когда катушка помещается в магнитное поле, через нее протекает ток, заставляющий катушку вращаться.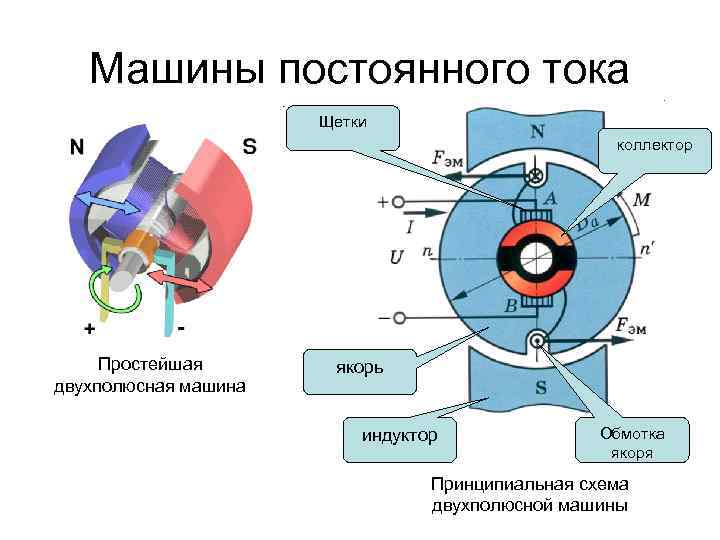
Возьмите два стержневых магнита и выровняйте полюса с небольшим промежутком между ними. Сделайте петлю из проводящего провода небольшой длины. Поддерживайте эту петлю в пространстве между магнитами так, чтобы она оставалась в сфере действия магнитов. Теперь для последней секции соедините концы петли вместе.
Когда вы пропускаете электричество через вашу простую цепь, вы заметите, что ваша петля «двигается». Что вызывает это? Магнитное поле, создаваемое магнитами, взаимодействует с магнитным полем, создаваемым электрическим током, протекающим в проводнике. Поскольку петля стала магнитом, одна ее сторона будет притягиваться к северному полюсу, а другая — к южному. Это заставляет петлю вращаться бесконечно. Это принцип работы электродвигателя.
Работа электродвигателя
Электродвигатель — это устройство, преобразующее электрическую энергию в механическую. Проще говоря, электродвигатель — это устройство, используемое для производства вращательной энергии.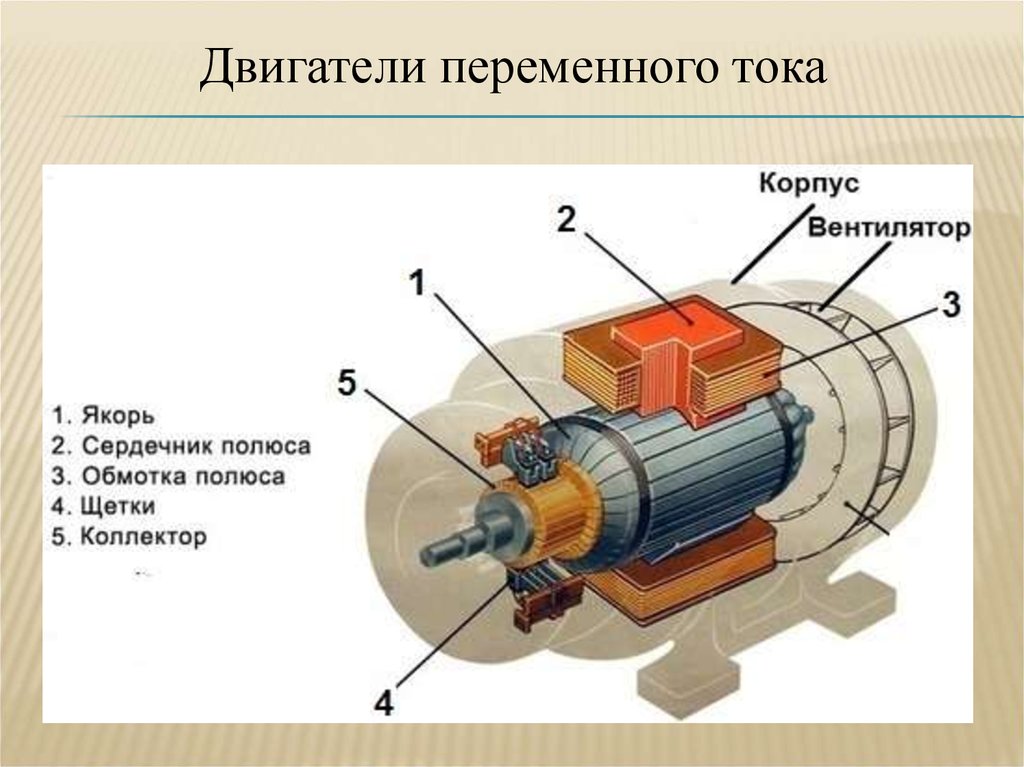
Электродвигатель
Согласно схеме ток поступает в катушку ABCD от щетки X. ABCD представляет собой катушку с током, помещенную в магнитное поле, перпендикулярное ей. Итак, используя правило левой руки Флеминга, мы можем сказать, что AB движется вниз, а CD движется вверх. CD движется к северному полюсу в следующем полуобороте, а AB движется к южному полюсу. Снова используя правило левой руки Флеминга, мы видим, что AB движется вверх, а CD движется вниз. Этот процесс продолжается, и катушка начинает вращаться.
Заключение
Вкратце, электрический двигатель постоянного тока представляет собой электрическую машину, преобразующую электрическую энергию в механическую. Поэтому мы обсудили, как работают двигатели постоянного тока и электродвигатели и их применение. Мы изучили принцип работы двигателя постоянного тока и электрического двигателя, а также правила, используемые для определения направления создаваемой силы.