
Индуктивные датчики. Виды. Устройство. Параметры и применение
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле:
L = WΦ/IГде W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем:
L = W²/RmГде R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.
Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:
L – индуктивность датчика, rd – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика. Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмж в сравнении с магнитным сопротивлением зазора воздуха Rмв.
Окончательно получается выражение:
На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:
Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику.
 Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности. - Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
 Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5).
Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Для функционирования дифференциального датчика применяют питание от трансформатора (5), который имеет вывод от средней точки. Между этим выводом и общим проводом катушек подключают прибор (4). При этом воздушный промежуток находится в пределах от 0,2 до 0,5 мм.
При расположении якоря в средней позиции при равных промежутках индуктивные сопротивления обмоток (3 и 3′) равны. Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
При малом отклонении якоря в любую сторону изменяется значение воздушных промежутков и индуктивностей. Поэтому прибор определяет ток разности I1-I2, который определен функцией перемещения якоря от средней позиции. Разность токов чаще всего определяется магнитоэлектрическим устройством (4), выполненным по типу микроамперметра со схемой выпрямления (В) на входе.
Полярность тока не зависит от изменения общего сопротивления катушек. При применении фазочувствительных схем выпрямления можно определить направление перемещения якоря от средней позиции.
Параметры- Одним из параметров индуктивных датчиков является диапазон срабатывания. По этому параметру выбирают датчики, однако он не настолько важен. В инструкции по датчику даны номинальные параметры питания при эксплуатации устройства при температуре +20 градусов. Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
- На практике при подборе датчика важны два показателя интервала срабатывания:
— Полезный.
— Эффективный.
Показания первого вычисляются как +10% от 2-го при температуре 25-70 градусов. Показания 2-го отличаются от номинала на 10%. Интервал температуры при этом увеличивается с 18 до 28 градусов. Если при втором параметре применяется номинальное напряжение, то при первом есть разброс 85-110%.
- Другим параметром является гарантированный предел срабатывания. Он колеблется от нуля до 81% от номинала.
- Также следует учитывать параметры: повторяемость и гистерезис, который равен расстоянию между конечными позициями работы датчика. Его оптимальная величина равна 20% от эффективного интервала срабатывания.
- Нагрузочный ток. Изготовители иногда производят датчики специального исполнения на 500 миллиампер.
- Частота отклика. Этот параметр определяет наибольшую величину возможности переключения в герцах. Основные промышленные датчики имеют частоту отклика 1000 герц.
Имеется несколько видов индуктивных датчиков с различным числом проводов для подключения. Рассмотрим основные виды подключений разных индуктивных датчиков.
- Двухпроводные индуктивные датчики подключаются непосредственно в нагрузочную цепь. Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
- Трехпроводные индуктивные датчики наиболее популярны. В них имеется два проводника для подключения питания, а один для нагрузки.
- Четырехпроводные и пятипроводные индуктивные датчики. У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
 Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.Маркировка проводников цветом является очень удобной для осуществления обслуживания и монтажа датчиков. Их выходные проводники промаркированы определенным цветом:
- Минус – синий.
- Плюс – красный.
- Выход – черный цвет.
- Второй проводник выхода – белый цвет.
Погрешность преобразования диагностируемого параметра влияет на способность выдачи информации индуктивным датчиком.
 Суммарная погрешность состоит из множества различных погрешностей:
Суммарная погрешность состоит из множества различных погрешностей:Электромагнитные параметры материалов и их свойства со временем меняются. Чаще всего процессы изменения свойств материалов происходят в первые 200 часов после термообработки сердечника магнитопровода. Далее эти свойства остаются теми же, и не влияют на полную погрешность датчика.
Достоинства
- Большая чувствительность.
- Повышенная мощность выхода, до нескольких десятков Вт.
- Возможность подключения к промышленным источникам частоты.
- Прочное и простое устройство.
- Нет трущихся контактов.
Недостатки
- Способны функционировать только на переменном напряжении.
- Стабильность питания и частота влияют на точность работы датчика.
- Медицинские аппараты.
- Бытовая техника.
- Автомобильная промышленность.
- Робототехническое оборудование.
- Промышленная техника регулирования и измерения.

Похожие темы:
- Емкостные датчики. Виды и устройство. Работа и применение
- Датчики Холла. Виды и применения. Работа и подключения
- Тензометрические датчики (Тензодатчики). Виды и работа. Устройство
- Датчики давления. Виды и работа. Как выбрать и применение
- Ультразвуковые датчики часть 1. Устройство и работа
- Ультразвуковые датчики часть 2. Типы и работа. Применение
Принцип работы индуктивных датчиков
Что же такое датчик в целом? Он могут быть совершенно различны и по форме, и по размеру. В целом датчик – это устройство, преобразующее воздействие физической величины в электрический сигнал, удобный для использования. Физическим воздействием может быть, например, расстояние до объекта, температура, влажность и различные другие физические величины. Индуктивный датчик – это датчик, который бесконтактно реагирует на металлический объект. Другими словами, он позволяет обнаружить металл, не соприкасаясь с ним. Датчики бывают цилиндрические, прямоугольные, плоские, уголковые, кольцевые, щелевые, и специальные, например, для контроля поворотных задвижек. Индуктивные датчики применяют для обнаружения, подсчёта, определения положения, скорости и перемещение металлических объектов.
Индуктивные датчики применяют для обнаружения, подсчёта, определения положения, скорости и перемещение металлических объектов.
Основной отличительной способностью индуктивных датчиков является их нечувствительность к неметаллическим объектам, исключением являются такие материалы, как ферриты. Также к важным преимуществам можно отнести простоту конструкции настройки и монтажа, стабильность и надёжность, устойчивость к загрязнениям, доступное и недорогое решение задач, возможность работать с чёрными и цветными металлами, а также сплавами. Именно поэтому индуктивные датчики нашли широкое применение для автоматизации процессов, например, в металлургии, машиностроении, добывающей промышленности, нефтяной, в том числе нефтехимии, в химической промышленности, в пищевой и других отраслях промышленности. С более конкретными применениями вы можете ознакомиться на нашем сайте https://www.sensor.ua/.
Где же был применён первый индуктивный датчик?
Историческая справка. Бесконтактный индуктивный выключатель был изобретён более 60 лет назад, в 1958 г. В Мангейме (Германия). Одним из основателей компании по производству электронных компонентов PEPPERL+FUCHS Вальтера Пёпперлем и его коллегой Вильфридом Гейлем.
В Мангейме (Германия). Одним из основателей компании по производству электронных компонентов PEPPERL+FUCHS Вальтера Пёпперлем и его коллегой Вильфридом Гейлем.
Крупная химическая компания BASF нуждалась в надёжном устройстве, которое могло бы работать во взрывоопасной среде в зоне химического завода, выполняя тысячи циклов переключения при очень низких токах.
В лаборатории PEPPERL+FUCHS удалось разработать альтернативы механическим бесконтактным выключателям. Это был первый в мире датчик приближения в комплекте с первым транзисторным усилителем, с искробезопасной схемой управления.
Изобретение стало всемирно признанным стандартом в индустрии бесконтактных выключателей, а также отправной точкой в истории успеха компании. Этому событию посвящена бронзовая плита на так называемой Аллее славы Мангейма.
Принцип работы индуктивного датчика
Чтобы понять принцип работы индуктивного датчика, разберём его составляющие. Индуктивные бесконтактные выключатели состоят из следующих основных узлов: электромагнитная система, генератор, демодулятор, пороговое устройство, и выходной усилитель, электромагнитная система, её также называют элементом датчика.
Электромагнитная система является частью генератора, она представляет собой катушку индуктивности, помещённую в магнитопровод, чаще всего – это круглая ферритовая чашка.
Чашки, в зависимости от габаритов датчика, могут иметь диаметр от 3,3мм до 150мм. С внешней стороны ферритовый сердечник закрыт ферритовым колпачком, его торцевая часть называется чувствительной поверхностью. Область перед чувствительной поверхностью называется зоной чувствительности датчика, там сконцентрировано магнитное поле, оно распространяется примерно наполовину диаметра датчика. Генератор – это та часть электронной схемы датчика, которая вырабатывает электрические колебания. Генератор формирует переменное электромагнитное поле, в сечении напоминающее букву «м». Катушка индуктивности и конденсатор образуют колебательный конур. Конденсатор – это устройство для накопления заряда и энергии электрического поля. Генератор вырабатывает незатухающие синусоидальные колебания. При попадании металлического объекта в зону чувствительности датчика, в нём образуются вихревые токи, они создают встречный магнитный поток, демпфирующий колебания контура, другими словами, происходит затухание электромагнитных колебаний, уменьшается их амплитуда. Чем ближе металлический объект к чувствительной поверхности датчика, и чем больше его размер, тем сильнее затухание. Демодулятор, или детектор, он же выпрямитель, преобразует изменение высокочастотных колебаний генератора в изменение постоянного напряжения.
При попадании металлического объекта в зону чувствительности датчика, в нём образуются вихревые токи, они создают встречный магнитный поток, демпфирующий колебания контура, другими словами, происходит затухание электромагнитных колебаний, уменьшается их амплитуда. Чем ближе металлический объект к чувствительной поверхности датчика, и чем больше его размер, тем сильнее затухание. Демодулятор, или детектор, он же выпрямитель, преобразует изменение высокочастотных колебаний генератора в изменение постоянного напряжения.Пороговое устройство сравнивает переданное электро модулятором напряжение с заранее установленным порогом срабатывания. При достижении порога формируется логический сигнал «0» или «1», т.е. выключение или включение. Таким образом пороговое устройство преобразует аналоговый сигнал детектора в цифровой выходной сигнал, ещё его называют дискретным. В качестве порогового устройства используют как транзисторные, там и микро схемные компораторов и тригеров Шмидта.
Особенностью порогового устройства является то, что пороги переключения из «0» в «1» и из «1» в «0» не совпадают. Это делается преднамеренно для повышения помехоустойчивости датчика. Данное свойство называют гистерезисом.
Выходной усилитель увеличивает мощность выходного сигнала до необходимого значения для передачи последующему устройству. Выходной усилитель часто называют выходным ключом, т.к. он оперирует логическим значением «0» и «1». В качестве выходного ключа могут использоваться транзисторы различных типов, тиристоры (семисторы), реле электромагнитные, реле твердотельные, оптроны, интеллектуальные ключи и другие специализированные микросхемы. Электромагнитная система, генератор, демодулятор, пороговое устройство и выходной усилитель являются основой индуктивных датчиков.
Подытожим вышесказанное. Принцип действия индуктивного датчика основан на изменении параметров электромагнитного поля при вхождении металлического объекта в зону чувствительности. Эти изменения фиксируются электронной схемой датчика и изменяют его состояние. В результате этого происходит коммутация выходных цепей: размыкание нормально замкнутого, замыкание нормально разомкнутого или переключение контакта.
Эти изменения фиксируются электронной схемой датчика и изменяют его состояние. В результате этого происходит коммутация выходных цепей: размыкание нормально замкнутого, замыкание нормально разомкнутого или переключение контакта.
Определения:
НЕТ (нормально разомкнутый): Релейный выход, который разомкнут, запрещая текущий поток, когда исполнительный механизм отсутствует и закрывается, позволяя поток тока при наличии исполнительного механизма.
НЗ (нормально замкнутый): Релейный выход, который замкнут, позволяя ток течет, когда привод отсутствует и открывается, запрещая поток тока при наличии исполнительного механизма.
НПН
Выход: Транзисторный выход, переключающий общий или
отрицательное напряжение на нагрузку. Нагрузка подключается между
положительный запас и выход. Текущие потоки от
нагрузка через выход на землю, когда выход переключателя
на. Также известен как поглощение тока или отрицательное переключение.
Нагрузка подключается между
положительный запас и выход. Текущие потоки от
нагрузка через выход на землю, когда выход переключателя
на. Также известен как поглощение тока или отрицательное переключение.
ПНП Выход: Транзисторный выход, коммутирующий положительное напряжение к нагрузке. Нагрузка подключается между выходом и общим проводом. Ток течет с выхода устройства через нагрузку на заземление, когда выход переключателя включен. Также известен как текущий источник или положительное переключение.
Эксплуатация
Расстояние (Sn): Максимальное расстояние от датчика до
квадратный кусок железа (Fe 37) толщиной 1 мм со сторонами =
диаметр чувствительной поверхности, который вызовет изменение
на выходе датчика.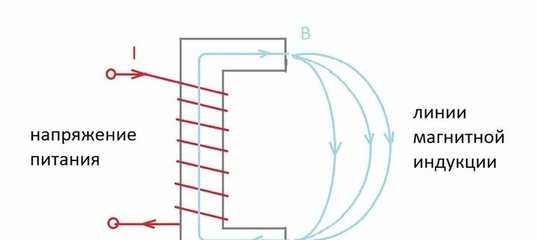
Мощность Источник питания: Диапазон напряжения питания, в котором будет работать датчик. в.
Макс. Ток переключения: Допустимая величина непрерывного тока проходить через датчик, не вызывая повреждения датчика. Он указан как максимальное значение.
Мин. Ток переключения: Это минимальное значение тока, которое должен протекать через датчик, чтобы гарантировать работу.
Макс.
Пиковый ток: Максимальный пиковый ток указывает на максимальное
текущее значение, которое датчик может выдержать за ограниченный период времени
времени.
Остаток Ток: Ток, протекающий через датчик при он в открытом состоянии.
Мощность Drain: Количество тока, необходимое для работы сенсора.
Напряжение Падение: Падение напряжения на датчике при движении максимальная загрузка.
Короткий Защита цепи: Защита от повреждения датчика если нагрузка закоротит.
Работа
Частота: Максимальное количество циклов включения/выключения, которое
устройство способно за одну секунду. Согласно EN 50010,
этот параметр измеряется динамическим методом, показанным на рис.
инжир. 1 с датчиком в положениях (а) и (б). S — операционная
расстояние, а m — диаметр датчика. Частота
дается формулой на рис. 2.
Частота
дается формулой на рис. 2.
Повторяемость (%Sn): Разница между любыми значениями рабочего расстояния измерено за 8-часовой период при температуре от 15 до 30ºC и напряжение питания с отклонением <= 5%.
Гистерезис (%Sn): Расстояние между точкой включения подход привода и точка «выключения» отступление привода. Это расстояние снижает количество ложных срабатываний. Его значение дается в процентах от рабочего расстояния или расстояние. См. рис. 3
Заподлицо
Монтаж: Для установки рядом моделей для скрытого монтажа.
см. рис. 4а. Модели без скрытого монтажа могут быть встроены в
металл по рис. 4б. рядом см. рис.
4в. Sn = рабочее расстояние.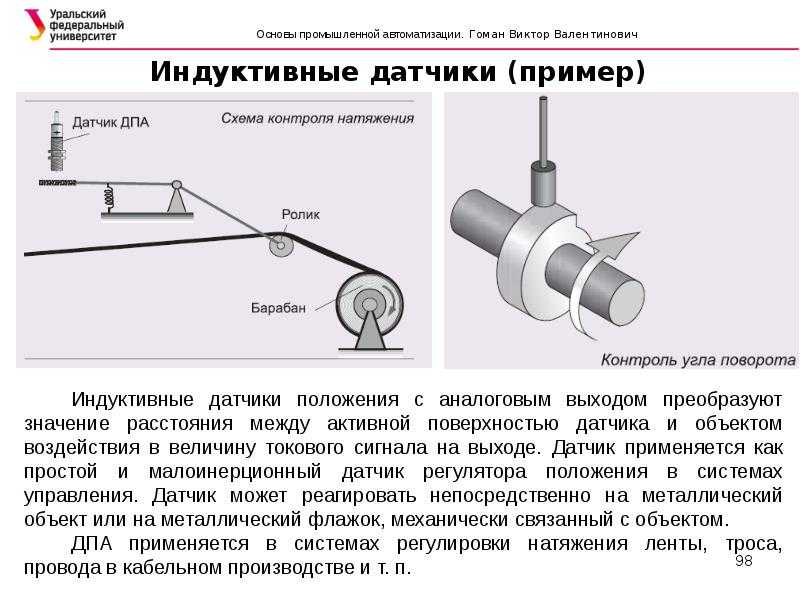
Защита
Степень: Степень защиты корпуса согласно IEC
(Международная электротехническая комиссия) выглядит следующим образом:
IP 65: Пыленепроницаемый. Защита от водяных струй.
IP 67: Пыленепроницаемый. Защита от воздействия погружения
Датчики приближения: Принципы | Техническое руководство | Сингапур
Компания Omron использует файлы cookie для улучшения вашего опыта на этом веб-сайте. Продолжая использовать веб-сайт, вы тем самым соглашаетесь с нашей Политикой конфиденциальности и использования файлов cookie
. Ведущий контент
Датчики приближения доступны в моделях, использующих высокочастотные колебания для обнаружения объектов из черных и цветных металлов, и в емкостных моделях для обнаружения неметаллических объектов. Доступны модели с устойчивостью к окружающей среде, термостойкостью, устойчивостью к химическим веществам и водостойкостью.
Основное содержание
Принципы работы
Принцип обнаружения индуктивных датчиков приближения
Индуктивные датчики приближения обнаруживают магнитные потери из-за вихревых токов, которые генерируются на проводящей поверхности внешним магнитным полем. Магнитное поле переменного тока создается на катушке обнаружения, и обнаруживаются изменения импеданса из-за вихревых токов, генерируемых на металлическом объекте.
Другие методы включают в себя датчики обнаружения алюминия, которые обнаруживают фазовую составляющую частоты, и датчики цельного металла, которые используют рабочую катушку для обнаружения только измененной составляющей импеданса. Имеются также датчики с импульсным откликом, которые генерируют вихревые токи в виде импульсов и обнаруживают изменение во времени вихревых токов в зависимости от напряжения, индуцированного в катушке.
<Качественное объяснение>
Чувствительный объект и Сенсор образуют отношения, похожие на трансформатор.
Трансформаторная связь заменяется изменениями импеданса из-за потерь на вихревые токи.
Изменения импеданса можно рассматривать как изменения сопротивления, включенного последовательно с датчиком. (Этого на самом деле не происходит, но такое представление облегчает качественное понимание.)
Принцип обнаружения емкостных датчиков приближения
Емкостные датчики приближения обнаруживают изменения емкости между воспринимающим объектом и датчиком. Величина емкости варьируется в зависимости от размера и расстояния до воспринимаемого объекта. Обычный емкостный датчик приближения подобен конденсатору с двумя параллельными пластинами, где определяется емкость двух пластин. Одна из пластин — это измеряемый объект (с воображаемым заземлением), а другая — чувствительная поверхность Датчика. Выявляются изменения мощности, генерируемой между этими двумя полюсами.
Объекты, которые можно обнаружить, зависят от их диэлектрической проницаемости, но помимо металлов они включают смолу и воду.