Ещё раз о погрешности измерения временных интервалов цифровыми осциллографами или как турецкий султан 5 ppm лопатой мерил
Ещё раз о погрешности измерения временных интервалов цифровыми осциллографами или как турецкий султан 5 ppm лопатой мерил
Еще раз о погрешности измерения временных интервалов цифровыми осциллографами или как турецкий султан 5 ppm лопатой мерилА.A. Дедюхин, АО «ПриСТ» Есть такое понятие «медвежья услуга». Казалось бы, какое отношение оно имеет к метрологии и уж тем более к цифровым осциллографам? Да, вроде никакого, если речь не идет о тщеславии. Но не перевелись еще на земле русской «медведи и услуги», которые ради собственных амбиций, лишь бы на их рецензии обратили внимание, готовы обляпать «желтым и жидким» предмет своего давнего обожания… |
Честно говоря, мне и раньше казалось, что Tektronix DPO-4000 серии как-то плохо измеряет временные интервалы, но некоторым к. т.н-ам удалось убедить меня в том, что он не просто плохо измеряет временные интервалы, а делает это ХУЖЕ ВСЕХ, по сравнению с другими осциллографами. Причем по сравнению не только с цифровыми осциллографами, но и с аналоговыми. Справедливости ради отметим, что это «ХУЖЕ ВСЕХ» он умудряется делать в пределах допустимой для него погрешности.
т.н-ам удалось убедить меня в том, что он не просто плохо измеряет временные интервалы, а делает это ХУЖЕ ВСЕХ, по сравнению с другими осциллографами. Причем по сравнению не только с цифровыми осциллографами, но и с аналоговыми. Справедливости ради отметим, что это «ХУЖЕ ВСЕХ» он умудряется делать в пределах допустимой для него погрешности.
Действительно, в моих ранних математических выкладках сделаны небрежные ошибки (в оригинале они не будут исправлены, поскольку исправление приведет к искажению последующей логики). Можно было бы над этим посмеяться и забыть, но «медведям» хотелось правды и, исправляя мои ошибки, они вывели цифру 0,8% — это и есть погрешность измерения временных интервалов осциллографом Tektronix DPO-4000 серии (речь идет об интервале 0,1 мкс, при частоте дискретизации 2,5 Гвыб/с). Думать в радостной эйфории «разоблачения» о смысле цифр было невдомек.
Напомним, что одной из отличительных особенностей цифровых осциллографов является то, что они обеспечивают гораздо большую точность измерений, как по временной оси, так и по оси амплитуд, по сравнению с аналоговыми осциллографами. Однако, оказывается есть аналоговые осциллографы, разработки аж 1980 года, которые лучше измеряют временной интервал, чем DPO-4000 серии образца 2006 года. Это советский аналоговый осциллограф С1-108, имеющий погрешность измерения временного интервала 0,5%. Почет и слава Генеральному Конструктору этого изделия (имеется ввиду С1-108 , а не DPO-4000), к параметрам которого чрез 26 лет приблизился мировой лидер цифровых осциллографов. Даже TDS-2000 серии, имеющий погрешность измерения 0,645%, измеряет более точно, чем его «старший брат». А новый TDS-2000 с литерой «B» измеряет с той же, погрешностью, как и DPO-4000. Скопметр Fluke-192B способен измерить временной интервал 0,1 мкс с погрешностью 0,4%. Причем для всех перечисленных выше средств измерения речь идет именно об измерении интервала 0,1 мкс (или частота 10 МГц), и это определено и руководствами по эксплуатации на эти осциллографы (где приведены полные ТТД), и описаниями типа средств измерения (в которых приведены основные ТТД), которые являются частью сертификата утверждения типа средства измерения, и утвержденными методиками поверки, которые верифицируют все эти приборы как пригодные к использованию.
Однако, оказывается есть аналоговые осциллографы, разработки аж 1980 года, которые лучше измеряют временной интервал, чем DPO-4000 серии образца 2006 года. Это советский аналоговый осциллограф С1-108, имеющий погрешность измерения временного интервала 0,5%. Почет и слава Генеральному Конструктору этого изделия (имеется ввиду С1-108 , а не DPO-4000), к параметрам которого чрез 26 лет приблизился мировой лидер цифровых осциллографов. Даже TDS-2000 серии, имеющий погрешность измерения 0,645%, измеряет более точно, чем его «старший брат». А новый TDS-2000 с литерой «B» измеряет с той же, погрешностью, как и DPO-4000. Скопметр Fluke-192B способен измерить временной интервал 0,1 мкс с погрешностью 0,4%. Причем для всех перечисленных выше средств измерения речь идет именно об измерении интервала 0,1 мкс (или частота 10 МГц), и это определено и руководствами по эксплуатации на эти осциллографы (где приведены полные ТТД), и описаниями типа средств измерения (в которых приведены основные ТТД), которые являются частью сертификата утверждения типа средства измерения, и утвержденными методиками поверки, которые верифицируют все эти приборы как пригодные к использованию. Еще раз акцентирую внимание: как технические аргументы будут использоваться только материалы имеющие законное признание на территории России, а не «технические мысли производителя», иногда не совпадающие со здравым смыслом (об этом ниже). Ниже приведена таблица сравнительных характеристик разных типов осциллографов на основе руководящих документов и их погрешности измерения временного интервала 0,1 мкс.
Еще раз акцентирую внимание: как технические аргументы будут использоваться только материалы имеющие законное признание на территории России, а не «технические мысли производителя», иногда не совпадающие со здравым смыслом (об этом ниже). Ниже приведена таблица сравнительных характеристик разных типов осциллографов на основе руководящих документов и их погрешности измерения временного интервала 0,1 мкс.
| Тип СИ | Погрешность измерения интервала 0,1 мкс | № госреестра |
| С1-108 | 0.5% Kр > 5 нс | 7866-80 |
| Fluke-190 серии | 0.41% при Kp=100 нс | 27908-05 |
| TDS-2000 серии | 0.645% при Kp=100 нс | 24018-02 |
| TDS-2000B серии | 0.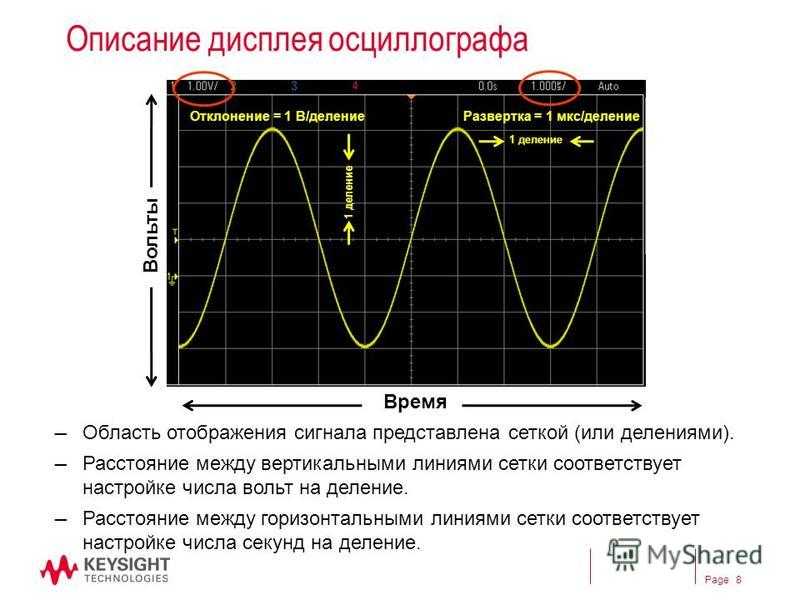 81% при Kp=100 нс 81% при Kp=100 нс | 32618-06 |
| DPO-4000 | 0.8% | 32619-06 |
Это расчетные погрешности измерения временного интервала 0,1 мкс. И из этого следует только один вывод — ПОЗОР DPO-4000, имеющему самую худшую погрешность измерения временных интервалов по сравнению с некоторыми бюджетными цифровыми осциллографами и некоторыми аналоговыми осциллографами. И большое спасибо к.т.н-ам — техническим директорам, сделавшим это «открытие» достоянием общественности!
Немного отклоняясь от темы «как измеряет Tektronix DPO-4000 серии» попробуем все-таки, наконец, выяснить – какую же все-таки погрешность измерения временного интервала декларирует производитель этого устройства, как плод своей «технической мысли »? Как уже ранее отмечалось, в РЭ (руководство по эксплуатации) нет ни слова про такой нужный параметр цифрового осциллографа как «погрешность измерения временного интервала», о чем в настоящий момент и идет речь. Но в РЭ есть ссылка на некую «принадлежность», под номером 071-1809-ХХ, которая называется «Справочник по техническим характеристикам DPO-4000», в которой и содержатся полные технические характеристики осциллографов серии DPO-4000. На странице 1-6 в таблице 1-2 (Table 1- 2: Horizontal and acquisition system specifications или «Характеристики системы сбора информации и тракта горизонтального отклонения»), где и должен быть указан этот параметр, опять нет ни слова про погрешность измерения временного интервала. Но зато в самой первой строчке таблицы 1-2 есть параметр «Long-term sample rate and delay time accuracy», что переводится как «Долговременная стабильность частоты дискретизации и погрешность времени задержки» (имеется ввиду генератора временной задержки) и даже указан параметр «±5 ppm over any ≥1 ms time interval», что означает ««±5 ppm для временных промежутков больше или равно 1 мс». Итак, в спецификации на осциллограф Tektronix DPO-4000 серии производитель вообще не нормирует такой параметр как «погрешность измерения временного интервала», а лишь указывает, что погрешность времени задержки генератора задержки составляет ±5 ppm, да и то, лишь при измерении временных интервалов более 1 мс (или частота сигнала ниже 1 кГц).
Но в РЭ есть ссылка на некую «принадлежность», под номером 071-1809-ХХ, которая называется «Справочник по техническим характеристикам DPO-4000», в которой и содержатся полные технические характеристики осциллографов серии DPO-4000. На странице 1-6 в таблице 1-2 (Table 1- 2: Horizontal and acquisition system specifications или «Характеристики системы сбора информации и тракта горизонтального отклонения»), где и должен быть указан этот параметр, опять нет ни слова про погрешность измерения временного интервала. Но зато в самой первой строчке таблицы 1-2 есть параметр «Long-term sample rate and delay time accuracy», что переводится как «Долговременная стабильность частоты дискретизации и погрешность времени задержки» (имеется ввиду генератора временной задержки) и даже указан параметр «±5 ppm over any ≥1 ms time interval», что означает ««±5 ppm для временных промежутков больше или равно 1 мс». Итак, в спецификации на осциллограф Tektronix DPO-4000 серии производитель вообще не нормирует такой параметр как «погрешность измерения временного интервала», а лишь указывает, что погрешность времени задержки генератора задержки составляет ±5 ppm, да и то, лишь при измерении временных интервалов более 1 мс (или частота сигнала ниже 1 кГц). Отыскать неофициальное упоминание об этой погрешности можно на сайте компании Tektronix http://www.tek.com/site/ps/0,,48-19032-SPECS_EN,00.html>http://www.tek.com/site/ps/0,,48-19032-SPECS_EN,00.html в рекламных материалах, где указана погрешность « 1/sample rate + 5 ppm * |Reading| + 0.4 ns ». Но реклама пусть остается рекламой, и не будем путать ее с метрологией. Тем более, что эти данные входят в противоречие с РЭ. Так в уже упомянутом документе под номером 071-1809-ХХ «Справочник по техническим характеристикам DPO-4000», есть раздел «Performance Verification» (по-русски «Поверка прибора»), а на странице 2-12 в параграфе «Check Sample Rate and Delay Time Accuracy» определен способ оценки частоты дискретизации и погрешности времени задержки. Так вот согласно этому параграфу, если при измерении временного интервала 80 мс погрешность составляет 10 ppm, то прибор исправен. Более чем странный факт — сначала производитель в РЭ указывает погрешность измерения 5 ppm, а потом в методике поверки заявляет, что если при измерении 5 ppm получается 10 ppm, то это даже очень хорошо.
Отыскать неофициальное упоминание об этой погрешности можно на сайте компании Tektronix http://www.tek.com/site/ps/0,,48-19032-SPECS_EN,00.html>http://www.tek.com/site/ps/0,,48-19032-SPECS_EN,00.html в рекламных материалах, где указана погрешность « 1/sample rate + 5 ppm * |Reading| + 0.4 ns ». Но реклама пусть остается рекламой, и не будем путать ее с метрологией. Тем более, что эти данные входят в противоречие с РЭ. Так в уже упомянутом документе под номером 071-1809-ХХ «Справочник по техническим характеристикам DPO-4000», есть раздел «Performance Verification» (по-русски «Поверка прибора»), а на странице 2-12 в параграфе «Check Sample Rate and Delay Time Accuracy» определен способ оценки частоты дискретизации и погрешности времени задержки. Так вот согласно этому параграфу, если при измерении временного интервала 80 мс погрешность составляет 10 ppm, то прибор исправен. Более чем странный факт — сначала производитель в РЭ указывает погрешность измерения 5 ppm, а потом в методике поверки заявляет, что если при измерении 5 ppm получается 10 ppm, то это даже очень хорошо. Просто прелестно! Вот оно главное отличие американской метрологии от нормальной! У них за океаном не только мили, фунты и баррели, но и чем хуже результат – тем лучше достоверность!
Просто прелестно! Вот оно главное отличие американской метрологии от нормальной! У них за океаном не только мили, фунты и баррели, но и чем хуже результат – тем лучше достоверность!
Но, отойдем от того, что пишет в РЭ производитель Tektronix, а как видно пишет он «что в голову взбрело» и обратимся к нормальной русской метрологии – все- таки Tektronix DPO-4000 серии включен в российский государственный реестр средств измерения и в ходе испытаний для целей утверждения типа СИ эти «заокеанские ляпы» при нормировании погрешностей должны быть устранены и приведены в полное соответствие для метрологического обеспечения на территории РФ. Итак, в описании типа на средства измерения DPO4032, DPO4034, DPO4054, DPO4104, включенные в госреестр под номером 32619-06, указанно:
пределы допускаемой абсолютной погрешности измерения временных интервалов, с
± (1 / Fд + 5 × 10-6 × Tизм + 0,4 × 10-9), где
Fд – частота дискретизации,
Tизм — измеряемый временной интервал.
Выводы:
- Погрешность измерения временных интервалов осциллографов DPO4032, DPO4034, DPO4054, DPO4104 для России приведена выше (Острова Зеленого мыса, Никарагуа, Конго и прочие страны с их метрологией нас не интересуют).
- Ограничения значений измеряемого временного интервала для России не предусмотрено.
- Метод измерения временного интервала не определен, то есть данная погрешность справедлива как для метода задержанной развертки, так и для метода автоматических измерений.
- РЭ, поставляемое в комплекте поставки с осциллографом Tektronix серии DPO-4000, не соответствует описанию типа на это СИ. Описание типа СИ содержит основные технические характеристики и после включения приборов в госреестр РФ, уважающие российских пользователей компании (например LeCroy) поставляют в Россию приборы с РЭ, полностью соответствующим российскими нормативным документам. Но, похоже, Tektronix хотел чихать на российскую метрологию, а в купе с полурусским пользовательским интерфейсом и отсутствующей в комплекте и обязательной, согласно описания типа СИ, методикой поверки (071-1808-00МП), и на всех российских пользователей.

Теперь вернемся опять к теме «как измеряет Tektronix DPO-4000 серии». Если сравнивать, как и раньше, Tektronix DPO-4054 с LeCroy WaveRunner 6050А, то погрешность измерения временных интервалов для WaveRunner 6050А определяется формулой согласно описания типа СИ и РЭ (№ госреестра 28222-04 ):
(0,06 × 10 × Кр / Кт + 10 × 10-6 × Tизм + 5 пс), где
10 — количество делений по горизонтали,
Кр – установленное значение коэффициента развертки,
Кт – количество точек внутренней памяти,
Tизм — измеренный временной интервал.
Абсолютная погрешность измерения временного интервала 0,1 мкс составляет 1,8*10-11 секунд или относительная погрешность равна 0,018%. Для Tektronix DPO-4054 относительная погрешность измерения равна 0,801%. Или соотношение относительной погрешности измерения временного интервала 0,1 мкс (или 10 МГц) для осциллографов Tektronix DPO-4054 и LeCroy WaveRunner 6050А составляет 0,801 / 0,018 = 44,47 раза.
То есть теоретически, согласно нормативных документов, официально признанных на территории Российской Федерации, осциллограф LeCroy WaveRunner 6050А измеряет конкретный временной интервал 0,1 мкс в 44,47 раза лучше, чем Tektronix DPO-4054.
А теперь от теории перейдем к практике автоматических измерений. Почему к автоматическим измерениям? Не будем сильно пинать Tektronix DPO-4000, что он плохо измеряет методом задержанной развертки – там более менее все нормально, если не считать, что на временах задержки кратных 10, генератор задержки работает некорректно. Это нетрудно выявить, если подать временной маркер 10 мс и сдвинуть его на 10,0001 мс (по шкале генератора задержки), при этом сам сигнал на экране сдвинется всего на 50 нс, хотя должен сдвинуться на 100 нс, то есть в два раза меньше, чем положено. Так на рисунке 1 приведен пример измерения временного интервала 100 нс, между сигналом с положением задержки 10,0000 мс (белого цвета) и сигналом с положением задержки 10,0001 мс (желтого цвета). Разность по шкале генератора задержки составляет 100 нс, а значение измеренное по шкале осциллографа и с помощью курсорных измерений составляет порядка 55 нс.
Разность по шкале генератора задержки составляет 100 нс, а значение измеренное по шкале осциллографа и с помощью курсорных измерений составляет порядка 55 нс.
Рисунок 1 |
Скорее всего, таких «жучков» в осциллографе превеликое множество, но пусть дилеры и инженеры Tektronix сами тестируют генератор задержки DPO-4000 на предмет где и насколько он врет, я лишь констатирую факт – местами врет. Для пользователя цифрового осциллографа метод задержанной развертки крайне неудобен из-за большого числа промежуточных операций с органами управления, а зачастую для некоторых сложных сигналов не применим вообще. Метод автоматических измерений быстр, прост и удобен в использовании, прогрессивен, дает рад преимуществ, например статистическую обработку результатов измерения.
Для практики измерения временного интервала используем генератор импульсов Г5-60, имеющий достаточно широкий диапазон установки, как длительности импульса, так и периода следования. Импульсные сигналы используем, что бы минимизировать явление гистерезиса 1 при измерении временного интервала. Измерения проведем как для однократного события, так и для измерений в режиме накопления статистики. При этом будем использовать собственные возможности осциллографов без привлечения дополнительных вычислительных устройств (типа внешних компьютеров) и без привлечения дополнительного программного обеспечения (собственной разработки или типа Excel, MatCad, MathLab и прочие), поскольку осциллограф для массового пользователя больше интересен как самостоятельное устройство.
Импульсные сигналы используем, что бы минимизировать явление гистерезиса 1 при измерении временного интервала. Измерения проведем как для однократного события, так и для измерений в режиме накопления статистики. При этом будем использовать собственные возможности осциллографов без привлечения дополнительных вычислительных устройств (типа внешних компьютеров) и без привлечения дополнительного программного обеспечения (собственной разработки или типа Excel, MatCad, MathLab и прочие), поскольку осциллограф для массового пользователя больше интересен как самостоятельное устройство.
На генераторе Г5-60 установим длительность импульса 12,3456 мс и период повторения импульсов 23,4567 мс. Проконтролируем эти параметры частотомером CNT-90 (а вдруг генератор импульсов испортился…) с опорой от внешнего рубидиевого источника. Результат контроля:
длительность импульса – 12,345600544 мс
повторения импульсов – 23,456402021 мс.
На рисунке 2 приведена осциллограмма измерения этого сигнала осциллографом DPO-4054 в режиме накопления статистики (ведь только методы математически статистики позволяют получить достоверные результаты!!!).
Рисунок 2 |
На рисунке 3 приведена осциллограмма измерения этого сигнала осциллографом LeCroy WaveRunner 6050A в режиме накопления статистики.
Рисунок 3 |
Определим абсолютную погрешность измерения для каждого осциллографа и соотношение погрешностей. Результаты сведем в таблицу 1.
Таблица 1 | ||
| Модели | Длительность | Период |
| Результаты измерения | ||
| CNT-90, мс | 12,345600544 | 23,456402021 |
| DPO-4054, мс | 12,35 | 23,46 |
| WaveRunner 6050A, мс | 12,3456120844 | 23,4564248236 |
| Абсолютная погрешность измерения | ||
| DPO-4054, мс | 0,0043994559999998 | 0,0035979790000020 |
| WaveRunner 6050A, мс | 0,0000115404000010 | 0,0000228026000002 |
| Соотношение абсолютных погрешностей измерения | ||
| DPO-4054 и WaveRunner 6050A (разы) | 381,2221 | 157,7881 |
Из рисунков 2 и 3 определим абсолютную погрешность для однократного измерения для каждого осциллографа и соотношение погрешностей. Результаты сведем в таблицу 2.
Результаты сведем в таблицу 2.
| Таблица 2 | ||
| Модели | Длительность | Период |
| Результаты измерения | ||
| CNT-90, мс | 12,345600544 | 23,456402021 |
| DPO-4054, мс | 12,35 | 23,46 |
| WaveRunner 6050A, мс | 12,34561169 | 23,45642450 |
| Абсолютная погрешность измерения | ||
| DPO-4054, мс | 0,0043994559999998 | 0,0035979790000020 |
| WaveRunner 6050A, мс | 0,0000111460000003 | 0,0000224790000019 |
| Соотношение абсолютных погрешностей измерения | ||
| DPO-4054 и WaveRunner 6050A (разы) | 394,7116 | 160,0596 |
И если кому-то показалось, что мне показалось, что LeCroy WaveRunner в 200 раз измеряет лучше временной интервал в режиме автоматических измерений, чем Tektronix DPO-4054, то если он (она) православный – то может перекреститься, что бы больше не казалось, поскольку в этом конкретном случае LeCroy измеряет в 380 раз лучше, чем Tektronix. А если этот он (она) мусульманин, еврей, буддист или какой другой веры – то может совершить свой собственный обряд, чтобы то, что ему (ей) кажется, больше никогда не казалось…
А если этот он (она) мусульманин, еврей, буддист или какой другой веры – то может совершить свой собственный обряд, чтобы то, что ему (ей) кажется, больше никогда не казалось…
Если усложнить задачу измерения временных интервалов, например, для импульсов большой скважности, то аутсайдер становится более чем явным. Для примера возьмем импульс длительностью 100 нс и периодом повторения 987,654 мс (контрольные значения частотомера 98,962 нс и 98,765506048 мс соответственно). Очевидно, что зафиксировать период этого сигнала осциллограф DPO-4000 может на развертке 20 мс. Результаты захвата и измерения периода и длительности приведены на рисунке 4.
Рисунок 4 |
Очевидно, что в силу большого значения коэффициента развертки, частота дискретизации уменьшилась до 50 Мвыб/с. В этом случае, если и можно говорить об какой-то достоверности измерения периода, то говорить о достоверном измерении длительности просто абсурдно – на глазок это около 8%. А форма этого импульса с использованием растяжки приведена на рисунке 5.
А форма этого импульса с использованием растяжки приведена на рисунке 5.
Рисунок 5 |
Осциллографы LeCroy для решения такого рода задач могут, в частности, использовать режим сегментированной развертки. В этом режиме сохраняется высокая частота дискретизации (до 5 Гвыб/с), обеспечивающая высокую достоверность измерения коротких длительностей, и одновременно обеспечивается измерений длинных временных периодов. На рисунке 6 приведена осциллограмма осциллографа LeCroy WaveRunner 6050A в режиме сегментированной развертки (2 сегмента) и результаты измерения временных параметров сигнала (Р1 – длительность импульса, Р2 – период повторения), ранее приведенного на рисунке 4 и 5.
Рисунок 6 |
Относительная погрешность измерения длительности импульса составляет 0,198%;
Относительная погрешность измерения периода повторения составляет 0,91 ppm.
Какое соотношение погрешностей измерения в этом случае оставим для анализа мужам, имеющим ученую степень. В этом режиме осциллографы LeCroy могут измерять настолько короткие импульсы, насколько позволяет частота дискретизации осциллографа, при этом период повторения может быть достоверно измерен, даже есл и он составляет минуты, часы и т.д. Результат измерения имеет разрешение 9 знаков.
Визуальный анализ формы импульса, отображаемого осциллографами LeCroy и Tektronix, сравнивать, по-моему, просто глупо….
Выше приведены достаточно простые примеры сигналов, но даже на их анализе можно понять, какой осциллограф, что и с какой достоверностью измеряет. Результаты получены для конкретных моделей осциллографов LeCroy и Tektronix, но очевидно, что для всей серии приборов подобного типа результаты если и будут отличаться, то не значительно.
Явление гистерезиса
Явление гистерезиса иногда может подпортить «впечатление» о достоверности измерения или статистики измерения того или иного временного параметра. Гистерезис (от греческого слова «hysteresis» — отставание) для цифрового осциллографа в режиме измерения временного интервала — это паразитное явление, связанное со скачкообразными изменениями на фронтах измеряемого сигнала и вызванное причинами хаотического характера. Причин, вызывающие нестабильность фронтов две. Первая причина — это аппаратные суммарные шумы трактов цифрового осциллографа, конечная разрядность АЦП осциллографа и так далее. Обычно эта причина и оценивается в спецификации как «погрешность измерения временного интервала». Вторая причина зависит от формы самого сигнала, определяется как «погрешность определения уровня 0,5U» и описывается формулой:
Гистерезис (от греческого слова «hysteresis» — отставание) для цифрового осциллографа в режиме измерения временного интервала — это паразитное явление, связанное со скачкообразными изменениями на фронтах измеряемого сигнала и вызванное причинами хаотического характера. Причин, вызывающие нестабильность фронтов две. Первая причина — это аппаратные суммарные шумы трактов цифрового осциллографа, конечная разрядность АЦП осциллографа и так далее. Обычно эта причина и оценивается в спецификации как «погрешность измерения временного интервала». Вторая причина зависит от формы самого сигнала, определяется как «погрешность определения уровня 0,5U» и описывается формулой:
, где
a1 – угол образованный нарастающим фронтом сигнала и вертикальной линией шкалы в градусах;
a2 – угол образованный спадающим фронтом сигнала и вертикальной линией шкалы в градусах.
То есть, чем более пологий фронт имеет сигнал, тем больше суммарная погрешность измерения временного интервала и, наоборот – на крутом фронте явление гистерезиса практически не проявляется. Так на рисунке 7 изображена осциллограмма синусоидального сигнала. На первый взгляд сигнал «чистый» и не имеет видимых искажений. Но при растяжке сигнала (осциллограмма внизу) отчетливо видны искажения типа «ступенька». Положение этих «ступенек» хаотически изменяется и при измерениях, например периода, это приводит к хаотическому изменению опорного уровня, от которого начинает отсчитываться период сигнала. Поскольку цифровые осциллографы способны обеспечить измерения временных интервалов с разрешением порядка единиц ppm, то такие хаотические колебания опорного уровня приводят к увеличению разброса между минимальным и максимальным измеренными значениями.
Так на рисунке 7 изображена осциллограмма синусоидального сигнала. На первый взгляд сигнал «чистый» и не имеет видимых искажений. Но при растяжке сигнала (осциллограмма внизу) отчетливо видны искажения типа «ступенька». Положение этих «ступенек» хаотически изменяется и при измерениях, например периода, это приводит к хаотическому изменению опорного уровня, от которого начинает отсчитываться период сигнала. Поскольку цифровые осциллографы способны обеспечить измерения временных интервалов с разрешением порядка единиц ppm, то такие хаотические колебания опорного уровня приводят к увеличению разброса между минимальным и максимальным измеренными значениями.
Рисунок 7 |
При наблюдении прямоугольного сигнала с крутыми фронтами от того же источника, что и для рисунка 7, с той же частотой и амплитудой, что и на примере выше, видно, что гистерезис отсутствует (см. рисунок 8).
рисунок 8).
Рисунок 8 |
Очевидно, что для сигнала, приведенного на рисунке 8, разброс между минимальным и максимальным измеренными значениями временного интервала будет существенно меньше. Попробуем практически оценить влияние гистерезиса на достоверность измерения временных интервалов. Для этого используем двухканальный генератор Tabor 2572. Один канал генератора формирует синусоидальный сигнал частотой 10 МГц, а второй канал формирует прямоугольный сигнал той же частоты, амплитуды обоих сигналов одинаковы. Генератор запитан от внешней опорной частоты 10 МГц от рубидиевого источника. Одновременно оба сигнала подаем на два входа осциллографа LeCroy, включаем режим измерения частоты по 50% уровню для обоих сигналов и по результатам измерения частоты строим гистограммы, отдельно для каждого измерения, с целью анализа статистики измерений. Поскольку сигнал на вход осциллографа подается от одного источника, то временные параметры обоих сигналов (погрешность установки частоты и нестабильность частоты) имеют одни и те же параметры. Влиянием самого осциллографа для относительных измерений частот можно пренебречь. Такая схема включения позволяет исключить практически все мешающие факторы и определить только влияние формы входного сигнала на результаты измерений. Результаты праведен на рисунке 9.
Поскольку сигнал на вход осциллографа подается от одного источника, то временные параметры обоих сигналов (погрешность установки частоты и нестабильность частоты) имеют одни и те же параметры. Влиянием самого осциллографа для относительных измерений частот можно пренебречь. Такая схема включения позволяет исключить практически все мешающие факторы и определить только влияние формы входного сигнала на результаты измерений. Результаты праведен на рисунке 9.
Рисунок 9 |
На вход С1 подается синусоидальный сигнал, осциллограмма F1 – представляет гистограмму распределения значений измерений частоты сигнала С1. Результаты измерения частоты сигнала С1 отображаются в окне измерений Р1.
На вход С3 подается прямоугольный сигнал, осциллограмма F2 – представляет гистограмму распределения значений измерений частоты сигнала С3. Результаты измерения частоты сигнала С3 отображаются в окне измерений Р2.
Обе гистограммы F1 и F2 имеют одинаковый масштаб по горизонтали. Из беглого визуального анализа видно гистограмма F2 (прямоугольный сигнал) имеет более узкую форму, что свидетельствует от меньшем разбросе измеренных параметров, чем гистограмма F1 (синусоидальный сигнал). При этом диапазон гистограммы F1 составляет 77,3 кГц, а диапазон гистограммы F2 составляет уже 28,7 кГц. То есть разброс значений измерений для синусоидального сигнала почти в три раза больше, чем для прямоугольного сигнала. Это и есть наглядное паразитное влияние гистерезиса.
При анализе результатов измерений рисунка 9 видно, что средние значения частоты, как для синусоидального, так и для прямоугольного сигнала имеют практически одно и то же значение — 9,999983 МГц и 9,999977 МГц. Измерение среднего значения обоих гистограмм (наиболее вероятного результата) так же дает практически одинаковые результаты — 9,9999828 МГц и 9,9999776 МГц. Отсюда следуют выводы:
- При одиночном измерении временного интервала, результаты для сигналов с меньшей крутизной фронта имеют большую погрешность измерения, чем для сигналов с большей крутизной фронта;
- При измерении временных параметров периодического статического сигнала с использованием методов математической статистики, результат измерения не зависит от формы сигнала и паразитное хаотическое влияние гистерезиса исключается.
Литература:
- Осциллограф универсальный С1-108. Техническое описание и инструкция по эксплуатации 2.044.117 ТО
- ВНИИМС, описание типа на СИ с № госреестра 27908-05; осциллографы Fluke серии Fluke-190
- ВНИИМС, описание типа на СИ с № госреестра 24018-02; осциллографы Tektronix серии TDS-1000/2000
- ВНИИМС, описание типа на СИ с № госреестра 32618-02; осциллографы Tektronix серии TDS-1000B/2000B
- ВНИИМС, описание типа на СИ с № госреестра 32619-06; осциллографы Tektronix серии DPO-4000
- ВНИИМС, описание типа на СИ с № госреестра 28222-04; осциллографы LeCroy серии WaveRunner 6000
Автор:
Дедюхин А.А.
Дата публикации:
23.01.2007
44.Основные погрешности осциллографа.
К основным погрешностям осциллографа относятся :
1) Для канала y:
а)
погрешность измерения напряжения,
Которая определяется классом точности.
Кл.точн
1
2
3
4
Осн.погр.%
3
5
10
12
Основная погрешность измеряется по амплитуде.
б) коэфф. отклонения луча, который характеризует отношение Ux к величине отклонения луча h [В/см или В/дел]
гостируется по ГОСТу и может принимать
значения = ,
где n=-3,-2,-1,0,1,2.
Кл.точн
1
3
4
Осн.погр.%
2,5
4
8
10
в) неравномерность переходных характеристик. Поскольку осциллограф применяется для исследования для исследования импульсных сигналов, то необходимо, чтобы в канале … не наблюдалось искажение сигналов. Чем выше верхняя частота полосы пропускания, тем более короткие импульсы можно снять.
г) — задается в % характеризуется
качество
усилит
Кл. | 1 | 2 | 3 | |
Осн.погр.% | 1,5 | 2 | 3 | 5 |
 точн
точнд) входное сопротивление
е) входная емкость
ж) КСВ (для высокочастотных осциллографов)
2) Для канала X:
а) Основная погрешность измерения временных интервалов
Кл.точн
1
2
3
4
Осн.
погр.%3
5
10
12
 погр.%
погр.%б) коэффициент развертки – расстояние, на которое отклоняется луч за время прямого хода [с/см; мкс/см; мс/см]
Кл.точн
1
2
3
4
Осн.погр.%
2.5
4
7
10
Парамеры, характеризующие синхронизацию диапазон частот, которым обеспечивается синхронизации уровни
45.
 Измерения с помощью осциллографа.
Измерения с помощью осциллографа.Визуальное наблюдение
При этом исследовании важным требованием является отсутствие искажений, что достигается необходимой полосой пропускания каналом вертикального отклонения, качеством фокусировки и яркости изображения. Отсутствие паразитных наводок(в частности сетевого напряжения) искажает форму сигналов.
Измерение напряжения: осуществляется методом комбинированного отклонения, который сводится к предварительной калибровки канала Y с помощью калибратора амплитуды (если он есть). Можно осуществить и методом сравнения, если осциллограф имеет второй вход, т.е. является 2-хканальным. Тогда на один вход подается калиброванное напряжение, а на второй сигнал.
Измерение интервала времени: метод прямого преобразования с помощью калибровочного коэффициента развертки, тогда ; метод сравнения – если имеется 2-хлучевой или 2-хканальный осциллограф.
Измерение частоты осуществляется методом интерференционных картин. При измерении частоты исследований сигнал подается на канал Y, а на X сигнал с известной частотой, при этом внутренняя развертка отклоняется. В зависимости от соответствия частот и фазовых сдвигов наблюдаются следующие
1
/
O
\
2
∞
∞
3
, где n
–количество пересечений, не проходящих
через узлы в фигуре. -4 Вольт.
-4 Вольт.
Мы использовали Rigol ds1052e (цифровой мультиметр)
Это инструкция https://cdn-shop.adafruit.com/datasheets/Users+Guide+DS1000E.pdf
РЕДАКТИРОВАТЬ: Погрешность усиления по постоянному току:
2 мВ/дел-5 мВ/дел:
± 4% (нормальный или средний режим сбора данных)
10 мВ/дел-10 В/дел:
± 3% (нормальный или средний режим сбора данных)\
Измерение постоянного тока :
Точность, Средняя
Режим сбора данных
Среднее значение ≥16 сигналов с вертикальной позицией в нуле:
± (Погрешность усиления по постоянному току × показание + 0,1 дел + 1 мВ)
Среднее значение ≥16 сигналов с положением по вертикали не на нуле:
± [Погрешность усиления постоянного тока × (показание + положение по вертикали) + (1% от
вертикальное положение) + 0,2 дел]
Добавьте 50 мВ для настроек от 250 мВ/дел до 10 В/дел
Это правильный раздел в руководстве для расчета погрешности при измерении напряжения?
Если это так, то следующий правильный способ расчета неопределенности для 72 мВ/дел и показания 10 мВ и со средним режимом сбора данных, превышающим 16 осциллограмм:
0,03 * 0,01 В + 0,1 * 0,072 В + 0,001 В = 0,009 В (с округлением в большую сторону)
Спасибо за ответы
- анализ ошибок
$\endgroup$
2
$\begingroup$
Две основные проблемы с ‘областью:
насколько хорошо вы смогли прочитать расположение следа на экране? (наверное можно обойтись 1/10 деления, но люди не всегда осторожны)
Насколько надежна калибровка прицела? Заявления производителя являются хорошим источником для этого, но часто более точно сравнить прицел с другим инструментом, который, как известно, является более точным.
например хороший генератор сигналов и цифровой мультиметр.
 например хороший генератор сигналов и цифровой мультиметр.
например хороший генератор сигналов и цифровой мультиметр.После этого вам необходимо знать стандартную теорию объединения ошибок.
$\endgroup$
2
$\begingroup$
Независимо от того, какой эксперимент вы проводите, вы должны использовать гауссово распространение ошибки (https://www.geol.lsu.edu/jlorenzo/geophysics/uncertainties/Uncertaintiespart2.html). Итак, сначала вы должны реалистично оценить ваши прямые ошибки измерения, а затем вы должны использовать гауссово распространение ошибки для вычисления ошибок других переменных с распространением ошибки. В случае с осциллографом у вас должна быть погрешность показаний, которую необходимо оценить, и внутренняя погрешность оборудования (в данном случае осциллографа), которая должна быть записана где-то в присылаемом вами руководстве.
$\endgroup$
2
$\begingroup$
Точность измерений прицела определить непросто, потому что производители прицелов преднамеренно дают расплывчатые данные. Основная проблема заключается в 8-битном разрешении, которое подходит для хорошего изображения, но не подходит для реальных лабораторных измерений.
Основная проблема заключается в 8-битном разрешении, которое подходит для хорошего изображения, но не подходит для реальных лабораторных измерений.
Принимая во внимание, что многие измерения составляют лишь часть полной шкалы, и обычно будет ошибка 3 LSB для шума и смещений, это делает эффективное разрешение между 4-6 битами в зависимости от того, какая часть экрана используется. Разрешение 4 бита — это точность 6% чтения.
Например, если у вас есть осциллограмма с пиковым значением около +82 В, вы не можете использовать 20 В/дел, поэтому необходимо 50 В/дел, что означает охват экрана от -200 В до +200 В (полный диапазон шкалы 400 В). Для этого диапазона разрешение составляет 400/250 = 1,6 В/младший бит. Это означает, что вы эффективно измеряете 82 В с системой, имеющей разрешение около 2 В. Предположим, ±3 LSB для смещения, шума, и вы, по сути, измеряете 82 В ± 5 В, что очень грубо.
Но это только начало проблемы. Поскольку ядро настолько грубое, нет смысла проектировать другие части системы для «нормальной» точности. Так, например, неравномерность частотной характеристики в полосе пропускания обычно рассчитана на ± 0,5 дБ, что эквивалентно ± 5%, и эта ошибка находится на вершине разрешения / шума / смещения.
Так, например, неравномерность частотной характеристики в полосе пропускания обычно рассчитана на ± 0,5 дБ, что эквивалентно ± 5%, и эта ошибка находится на вершине разрешения / шума / смещения.
Также могут быть ошибки в программных алгоритмах измерения среднеквадратичного значения, в датчиках высокого напряжения и т.д.
И все же в инструкции написано «Ошибка усиления по постоянному току = ±3%» и не дано никаких намеков на множество других источников погрешности. Это вводит в заблуждение, поскольку других цифр нет, пользователи (как и я в течение многих лет) видят 3% и предполагают, что это все.
$\endgroup$
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Прецизионность и точность осциллографов
Точность и правильность измерений напряжения, выполняемых с помощью цифрового осциллографа, зависят от скорости, с которой берутся выборки, т. е. частоты выборки и глубины выборки или разрядности. Битовая глубина — это просто количество битов информации в каждом образце, и она напрямую соответствует разрешению каждого образца. Это также относится к динамическому диапазону системы, наибольшей и наименьшей амплитуде сигнала, который может быть оцифрован.
Другая сторона медали — искажение. Например, 16-битное квантование сигнала подразумевает динамический диапазон 96 дБ и минимальное искажение 0,0015%. Стоит выяснить, откуда берутся эти цифры. Как правило, их нельзя найти в спецификации прицела, а вместо этого они рассчитываются на основе фундаментальных принципов.
В цифровых системах динамический диапазон — это отношение максимального и минимального уровней сигнала, необходимое для поддержания заданного коэффициента битовых ошибок. Количество битовых ошибок — это количество принятых битов потока данных по каналу связи, которые были изменены из-за шума, помех, искажений или ошибок синхронизации битов. Частота ошибок по битам (BER) — это количество ошибок по битам в единицу времени. Коэффициент битовых ошибок (также BER) — это количество битовых ошибок, деленное на общее количество переданных битов за интересующий временной интервал. Коэффициент битовых ошибок — безразмерная мера производительности, часто выражаемая в процентах.
Количество битовых ошибок — это количество принятых битов потока данных по каналу связи, которые были изменены из-за шума, помех, искажений или ошибок синхронизации битов. Частота ошибок по битам (BER) — это количество ошибок по битам в единицу времени. Коэффициент битовых ошибок (также BER) — это количество битовых ошибок, деленное на общее количество переданных битов за интересующий временной интервал. Коэффициент битовых ошибок — безразмерная мера производительности, часто выражаемая в процентах.
Другой способ представления динамического диапазона — отношение максимального напряжения к минимальному напряжению, которое может преобразовать АЦП. В общем, динамический диапазон зависит только от количества битов, а не от максимального входного напряжения. Динамический диапазон — это отношение (обычно выражаемое в дБ) между минимальным уровнем шума АЦП и максимальным входным сигналом. Например, 12-битный преобразователь имеет разрешение 2 12 – 1 или 4095. Если бы мы оцифровывали сигнал 5 В с помощью 12-разрядного преобразователя, минимальное напряжение, при котором АЦП имел бы только младший значащий бит, равно 5/4,09. 5 = 1,22 мВ. Таким образом, динамический диапазон АЦП в этом случае составляет 20 × log 10 (5/0,00122) = 72,2 дБ.
5 = 1,22 мВ. Таким образом, динамический диапазон АЦП в этом случае составляет 20 × log 10 (5/0,00122) = 72,2 дБ.
Шум квантования устанавливает нижний предел минимального уровня шума при фактической частоте дискретизации. Шум квантования — это всего лишь ошибка, вносимая квантованием в АЦП. В основном это ошибка округления между аналоговым входным напряжением АЦП и выходным оцифрованным значением. Однако шум реального АЦП будет выше шума квантования.
Существует еще одно широко используемое уравнение для отношения сигнал/шум АЦП: SNR = 6,021×N + 1,763 дБ, где N = количество битов. Стоит углубиться в то, как возникает это уравнение.
Полный вывод этого уравнения довольно сложен. Краткая версия начинается с ошибки квантования АЦП. Идеальный преобразователь оцифровывает сигнал с максимальной ошибкой, равной ±½ младшего значащего бита, LSB. Ошибка квантования для любого сигнала переменного тока, который охватывает более нескольких LSB, может быть аппроксимирована пилообразным сигналом, имеющим размах амплитуды q, вес LSB. В этом анализе есть некоторые упрощающие предположения, но они не важны для объяснения уравнения динамического диапазона.
В этом анализе есть некоторые упрощающие предположения, но они не важны для объяснения уравнения динамического диапазона.
Анализ начинается с уравнения e(t) для пилообразной ошибки, записанной через наклон пилообразной формы, s, как показано на рисунке выше:
e( t ) = s t , q/2s < t < +q/2s
Затем мы вычисляем среднеквадратичное значение этого члена ошибки. Среднеквадратическая ошибка измеряет среднее квадратов ошибок или отклонений, то есть разницу между оценкой ошибки и тем, что оценивается. В случае пилообразной ошибки мы делаем это, возводя в квадрат каждую отдельную пилообразную форму, представленную st, а также суммируя и деля на количество выборок. Эту операцию можно записать в виде интеграла:
Мы получаем среднеквадратичную ошибку квантования, извлекая квадратный корень из q 2 /12 :
Помните, что полоса пропускания Найквиста простирается от постоянного тока до половины частоты дискретизации. Шум квантования распространяется более или менее равномерно по ширине полосы Найквиста. Одно из основных предположений состоит в том, что шум квантования не коррелирует с входным сигналом. В особых условиях, когда тактовая частота дискретизации и сигнал гармонически связаны, шум квантования становится коррелированным, и энергия концентрируется в гармониках оцифровываемого сигнала. Но среднеквадратичное значение шума остается приблизительно равным q/√12.
Шум квантования распространяется более или менее равномерно по ширине полосы Найквиста. Одно из основных предположений состоит в том, что шум квантования не коррелирует с входным сигналом. В особых условиях, когда тактовая частота дискретизации и сигнал гармонически связаны, шум квантования становится коррелированным, и энергия концентрируется в гармониках оцифровываемого сигнала. Но среднеквадратичное значение шума остается приблизительно равным q/√12.
Теперь можно рассчитать теоретическое отношение сигнал/шум, предполагая, что входная синусоида v(t) соответствует полной шкале:
Из соотношения V среднеквадратичное значение = V пик /√2, среднеквадратичное значение V среднеквадратичное значение полного входа равно
Следовательно, среднеквадратичное отношение сигнал/шум для идеального N-разрядного преобразователя равно
. Это соотношение сохраняется для полосы Найквиста, от постоянного тока до половины частоты дискретизации.
Существуют определенные особые условия, при которых шумовые частоты могут сильно коррелировать с входным сигналом переменного тока. Например, существует большая корреляция между шумом и входными сигналами для периодических сигналов с малой амплитудой, чем для случайных сигналов с большой амплитудой. Обычно предполагается, что теоретический шум квантования однороден вплоть до частоты Найквиста. Но в случае сильной корреляции шум квантования оказывается сосредоточенным на различных гармониках входного сигнала именно там, где они нежелательны.
В большинстве случаев на вход АЦП поступает полоса частот (всегда суммирующаяся с некоторым неизбежным системным шумом), поэтому шум квантования имеет тенденцию быть случайным. Однако при выполнении БПФ на АЦП, использующих в качестве входных данных спектрально чистые синусоидальные волны, корреляция между шумом квантования и сигналом зависит от отношения частоты дискретизации к входному сигналу.
Существует несколько типов АЦП. Как правило, в характеристиках осциллографа не указывается тип АЦП, который используется в осциллографе.
Как правило, в характеристиках осциллографа не указывается тип АЦП, который используется в осциллографе.
• Флэш или параллельный, при котором аналоговый сигнал, подлежащий выборке, сравнивается с набором эталонных напряжений.
• Последовательное приближение, при котором предварительные двоичные коды обратно соединяются с аналоговыми напряжениями и сравниваются с аналоговым сигналом на входе, чтобы определить, какой из них лучше всего подходит.
• Напряжение-частота, при котором генерируется цифровой импульсный сигнал, частота которого зависит от аналогового напряжения на входе устройства.
• Интегрирование с одним наклоном, при котором конденсатор заряжается до аналогового напряжения на входе АЦП, а время, необходимое для завершения этого заряда, измеряется и стробируется для получения цифрового значения.
• Интегрирование с двойным наклоном, при котором процедура напоминает интегрирование с одним наклоном, с той разницей, что в дополнение к измерению времени заряда конденсатора проводятся измерения времени его разрядки и проводятся сравнения в интересах достижения большей точность.
• Дельта-сигма, в котором аналоговое входное напряжение преобразуется модулятором в последовательный битовый поток, который проходит через фильтр нижних частот для создания цифрового выхода. Модуляторы функционируют по-разному, усложняя дельта-сигма. Однако дельта-сигма очень широко используется во многих приложениях АЦП.
В большинстве осциллографов с цифровым запоминающим устройством режим сбора выборки устанавливается по умолчанию при включении прибора. В течение каждого интервала выборки в память отправляется одна выборка, а все остальные выборки отбрасываются. Этот режим выборки, известный как прореживание, имеет потенциальный недостаток, заключающийся в том, что важные выборки могут не сохраняться.
Альтернативный режим выборки, известный как обнаружение пиков, сохраняет самые высокие и самые низкие пики соседних сигналов, сохраняя их в памяти сигналов, поэтому сохраняются высокие и низкие значения, включая выбросы.
Дополнительные режимы сбора данных, среднее значение и огибающая, а также пиковое обнаружение и сбор образцов отображаются и записываются для будущего использования, если это необходимо. Поскольку эта информация, вероятно, перегрузит масштабную сетку дисплея, осциллограф вынужден сжимать выборки. Результирующая плотность выборки отображается в виде диапазона интенсивности цвета, что позволяет пользователю наблюдать за формой сигнала, шумом и неопределенностью на одном дисплее.
Поскольку эта информация, вероятно, перегрузит масштабную сетку дисплея, осциллограф вынужден сжимать выборки. Результирующая плотность выборки отображается в виде диапазона интенсивности цвета, что позволяет пользователю наблюдать за формой сигнала, шумом и неопределенностью на одном дисплее.
При увеличении масштаба инструмент отображает меньше точек перекрытия, чтобы образцы реалистично отображались в каждом столбце пикселей. В конце концов, линия сигнала интерполируется либо с использованием линейной интерполяции, либо методом sin(x)/x, который может быть особенно точным для представления синусоид.
В процессоре создаются как отображаемые сигналы, так и записи сигналов. Эти автоматические процедуры влияют на внешний вид изучаемого сигнала на дисплее, а также на измерения, которые выполняются на записи сигнала.
В приборах Tektronix MDO 3000 и 4000, помимо прочего, функция Waveform Inspector, состоящая из концентрических ручек масштабирования и панорамирования, а также кнопок с функцией измерения, может открыть ворота в интересный мир постаналогово-цифровых преобразований.