
Однофазный однополупериодный выпрямитель. Однополупериодный инвертор. Преобразователи частоты в электроприводе
1. Однофазный однополупериодный выпрямитель
2. вертикально-фазовое управления
Принцип работы данной СУ основан на формировании
управляющих импульсов, следующих синхронно с сетевым
напряжением uАВ и сдвинутых относительно этого
напряжения по фазе на угол α. В выпрямителях с
регулированием по выходному напряжению угол α
обеспечивается таким, чтобы среднее значение
выпрямленного напряжения Ud мало отличалось от заданного
при различных возмущениях, например колебаниях сетевого
напряжения uАВ.
Привязка импульсов к сетевому напряжению осуществляется
входным устройством ВУ. Функции ВУ в данной СУ может
выполнять трансформатор со средней точкой, вторичные
полуобмотки которого создают два синусоидальных напряжения, сдвинутых между собой на угол π. Напряжения с каждой
вторичной полуобмотки ВУ поступают на фазосдвигающие
устройства ФУ1 и ФУ2.
 Наиболее просто фазосдвигающие
Наиболее просто фазосдвигающиеустройства в данном случае реализуются на принципе
вертикально-фазового управления. В частности, схемы
могут быть выполнены так, чтобы обеспечить формирование
импульсов в моменты равенства напряжений, поступающих от
ВУ и равных u’ву1, и и’ву2 с напряжением ΔUр, поступающим
на ФУ1 и ФУ2 от автоматического регулятора напряжения
АРН
структурная схема АРН состоит из источника опорного
(эталонного) напряжения ИОН, сумматора 1 и усилителя 2,
включающего в себя в общем случае различные звенья
динамической коррекции системы автоматического
регулирования. В рассматриваемом примере последняя
выполнена на принципе использования обратной связи.
Напряжение цепи обратной связи U0,с от датчика напряжения
ДН поступает на сумматор 1, на вход которого подается также
опорное напряжение U0. Разность этих напряжений ε (один из
сигналов поступает на сумматор с обратным знаком) подается
на вход усилителя 2.
 Выходной сигнал усилителя поступает на
Выходной сигнал усилителя поступает навходы ФУ1 и ФУ2 и далее на формирователи управляющих
импульсов ФИ1 и ФИ2. ΔUр определяет моменты
формирования управляющих импульсов тиристоров, т. е. угол
управления α.
Согласно принципа работы выпрямителя, чем больше угол α,
тем меньше среднее значение выходного напряжения
выпрямителя. Эта зависимость позволяет регулировать
выходное напряжение, в частности осуществлять его
стабилизацию на заданном уровне при различных возмущающих воздействиях. Например, если в результате возрастания
входного напряжения начнет увеличиваться выходное
напряжение выпрямителя, то усиленный сигнал
рассогласования ε будет изменять угол α так, чтобы
восстановить выходное напряжение на заданном уровне. В
результате сигнал ε будет стремиться к нулю, а выходное
напряжение к значению, заданному опорным напряжением U0
и коэффициентом передачи датчика выходного напряжения
ДН.
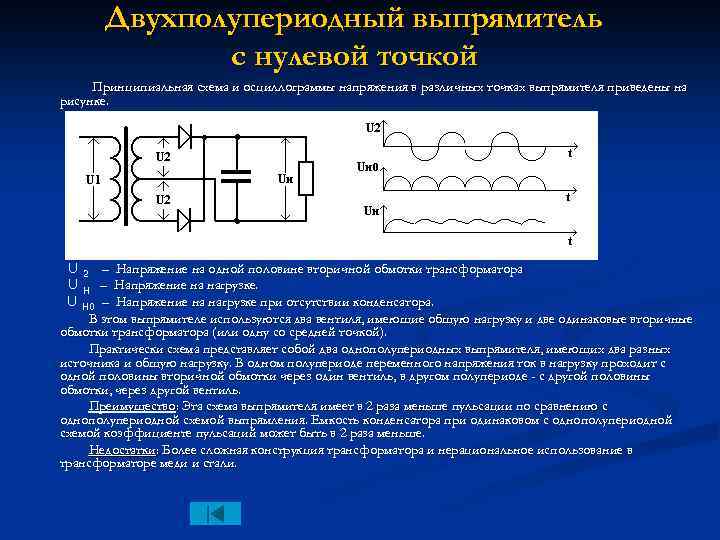
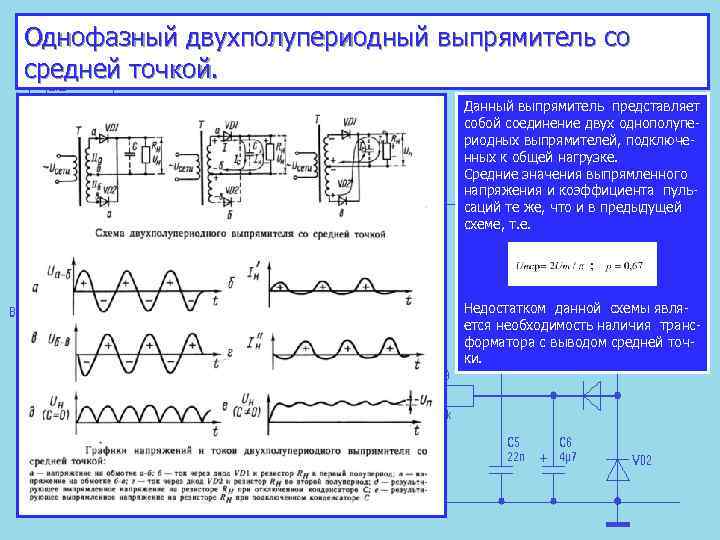
3. Однофазный двухполупериодный выпрямитель со средней точкой Ld = 0 α=0
Однофазный двухполупериодный выпрямитель со средней точкой Ld=0
α=0
4.
 Однофазный двухполупериодный выпрямитель со средней точкой Ld=0 α > 0 (см. модель)Однофазный двухполупериодный выпрямитель со средней точкой
Однофазный двухполупериодный выпрямитель со средней точкой Ld=0 α > 0 (см. модель)Однофазный двухполупериодный выпрямитель со средней точкойLd=0 α > 0 (см. модель)
5. Однофазный мостовой выпрямитель
6. Трехфазный мостовой выпрямитель (см. модель)
7. Трехфазный двухмостовой выпрямитель с последовательным соединением мостов
8. Однополупериодный инвертор
9. Автономные инверторы
10. Инверторы тока и напряжения
токаИнверторы
и
напряжения
11. Параллельный инвертор тока
12. Последовательный инвертор тока
13. Способы улучшения выходного напряжения инверторов и преобразователей частоты
14. Ряд Фурье
Любая периодическая функция f(t) с периодом T может быть представлена в виде суммы синусов и косинусовот аргумента nwt (так называемый ряд Фурье), где n — целое положительное число, t — время, w =2p/T — угловая
частота.
Компоненты ряда Фурье называются гармониками. Любая четная функция может быть разложена в ряд Фурье,
состоящий из косинусов, а любая нечетная функция раскладывается в ряд из синусов.

Рассмотрим функцию в виде периодически повторяющихся прямоугольных импульсов как показано на
рисунке (где a = b =T/2).. Период функции T= 2p/w. Эта функция раскладывается в ряд:
15. Влияние несинусоидальности напряжения на потребителей
U 2 m U 3m U 4 m …. U nmk гU
2
U 1m
2
2
k иU
2
U1
U
2
16. ПОСЛЕДОВАТЕЛЬНО ПАРАЛЛЕЛЬНЫЕ РЕЗОНАНСНЫЕ ЗВЕНЬЯ
19. Суммирование напряжений одинаковых частот
20. Суммирование напряжений разных частот
21. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ В ЭЛЕКТРОПРИВОДЕ
Классификация преобразователей частоты длярегулируемого электропривода переменного тока
22. Режимы работы насоса
Регулирование параметров насосадросселированием
В
настоящее
время
самым
распространенным
способом
поддержания необходимого давления в
системах подачи жидкости является
дросселирование.
Достижение
требуемых
параметров (расхода Q2 или напора h3)
производится изменением характеристик
трубопровода
при
неизменной
характеристике насоса путем прикрытия
дросселирующего клапана.
 Рабочая точка
Рабочая точкасмещается из позиции 1, с параметрами H
и Q в позицию 2′ по характеристике
насоса, обеспечивая требуемый расход Q2
или
напор
h3.
Насос развивает напор h3′. Между
насосом
и
дросселем
создается
избыточное давление h3′ — h3, на которое
расходуется энергия
N=k * Q2 * (h3′ — h3).
Регулирование изменением частоты
вращения двигателя
Достижение требуемого расхода
производится изменением характеристик
насоса при неизменной характеристике
трубопровода. Рабочая точка смещается
из позиции 1 в позицию 2 по
характеристике
трубопровода,
обеспечивая требуемый расход Q2 или
напор h3.
23. Оценка потребляемой мощности при регулировании частоты вращения
В соответствии с формулами приведенияцентробежных насосов и вентиляторов можно оценить
потребляемую
мощность,
при
использовании
регулирования оборотов двигателя:
Q/Q2=n/n2; H/h3=(n/n2)2; N/N2=(n/n2)3;
где:
Q — расход
n — частота вращения
H — напор
N — мощность потребляемая электродвигателем
Определение
экономии
электроэнергии
необходимо производить для каждого отдельного
случая, т.
 к. необходимо учитывать следующие
к. необходимо учитывать следующиефакторы:
— при регулировании расхода дросселированием также
происходит незначительное снижение потребляемой
мощности, причем в разной степени для разной
среды;
— работа насосов со статическим напором несколько
снижает ожидаемую экономию, при регулировании
частоты вращения.
График потребления электроэнергии при
регулировании
расхода
дросселированием
и
изменением частоты вращения двигателя представлен
справа.
Если организовать работу привода насосного
агрегата таким образом, чтобы он при изменении
параметров технологического процесса (расхода в
сети и давления на входе агрегата) изменял частоту
вращения, то в итоге можно без существенных потерь
энергии
стабилизировать
давление
в
сети
потребителей. При таком способе регулирования
исключаются потери напора (нет дроссельных
элементов), а значит, и потери гидравлической
энергии.
24. Изменение КПД насосного агрегата
Способ регулирования давления в сети путём изменения частоты вращения привода насосного агрегатаснижает энергопотребление ещё и по другой причине.
 Собственно насос как устройство преобразования энергии
Собственно насос как устройство преобразования энергииимеет свой коэффициент полезного действия — отношение механической энергии, приложенной к валу, к
гидравлической энергии, получаемой в напорном трубопроводе насосного агрегата. Характер изменения
коэффициента полезного действия насоса в зависимости от расхода жидкости Q при различных частотах представлен
на рисунке сверху.
В соответствии с теорией подобия максимум коэффициента полезного действия с уменьшением частоты
вращения несколько снижается и смещается влево. Анализ требуемого изменения частоты насосного агрегата при
изменении расхода в сети показывает, что с уменьшением расхода требуется снижение частоты вращения. Если
рассмотреть работу агрегата для расхода меньше номинального (вертикальные линии А и В), то для этих режимов
рационально работать на пониженной частоте вращения. В этом случае КПД насоса выше, чем при работе на
номинальной частоте вращения. Таким образом, снижение частоты вращения в соответствии с технологической
нагрузкой позволяет не только экономить потребляемую энергию на исключении гидравлических потерь, но и
получить экономический эффект за счёт повышения коэффициента полезного действия самого насоса преобразования механической энергии в гидравлическую.
25. Частотно регулируемый электропривод
Возможность управления частотой вращения короткозамкнутых асинхронных электродвигателей быладоказана сразу же после их изобретения. Реализовать эту возможность удалось лишь с появлением силовых
полупроводиниковых приборов — сначала тирристоров, а позднее транзисторов IGBT. В настоящее время во
всём мире широко реализуется способ управления асинхронной машиной, которая сегодня рассматривается
не только с точки зрения экономии энергии, но и с точки зрения совершенствования управления
технологическим процессом.
В промышленности и быту применяют двигатели переменного и постоянного тока. Исторически
сложилось, что для регулирования скорости вращения чаще использовали двигатель постоянного тока.
Преобразователь в данном случае регулировал только напряжение, был прост и дешёв. Однако двигатели
постоянного тока имеют сложную конструкцию, критичный в эксплуатации щёточный аппарат и сравнительно
дороги.
Асинхронные двигатели широко распространены, надёжны, имеют относительно
невысокую
стоимость, хорошие эксплуатационные качества, но регуляторы скорости их вращения из-за сложности систем
электронного регулирования частоты питающего напряжения стоили до начала 80-х годов дорого и не
обладали качествами, необходимыми для широкого внедрения в индустрию.
Современный частотно регулируемый электропривод состоит из асинхронного или синхронного
электрического двигателя и преобразователя частоты. Название «частотно регулируемый электропривод»
обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты
напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних 10 –15 лет в мире наблюдается широкое и успешное внедрение частотно
регулируемого электропривода для решения различных технологических задач во многие отрасли экономики.
Это объясняется в первую очередь разработкой и созданием преобразователей частоты на принципиально
новой элементной базе, главным образом на биполярных транзисторах с изолированным затвором (IGBT),
рассчитанный на токи до нескольких килоампер, напряжением до нескольких киловольт и имеющих частоту
коммутации 30 кГц и выше.
Существует два основных типа преобразователей частоты: с непосредственной связью и с
промежуточным контуром постоянного тока.

26. Скалярное частотное управление
При скалярном управлении по определенному закону изменяютамплитуду и частоту приложенного к двигателю напряжения. Изменение частоты
питающего напряжения приводит к отклонению от расчетных значений
максимального и пускового моментов двигателя, к.п.д., коэффициента мощности.
Поэтому для поддержания требуемых рабочих характеристик двигателя
необходимо с изменением частоты одновременно соответственно изменять и
амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении
чаще всего поддерживается постоянным отношение максимального момента
двигателя к моменту сопротивления на валу. То есть при изменении частоты
амплитуда напряжения изменяется таким образом, что отношение максимального
момента двигателя к текущему моменту нагрузки остается неизменным. Это
отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент
мощности и к.
 п.д. двигателя на всем диапазоне регулирования частоты вращения
п.д. двигателя на всем диапазоне регулирования частоты вращенияпрактически не изменяются.
Максимальный
момент,
развиваемый
двигателем,
определяется
следующей зависимостью
Mмах= k * U2 / f2 ,
где
k — постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется
характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение
U/f=const, и, по сути, обеспечивается постоянство максимального момента
двигателя. Характер зависимости напряжения питания от частоты для случая с
постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на
графике зависит от величин момента сопротивления и максимального крутящего
момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты,
максимальный момент двигателя начинает падать. Для компенсации этого и для
увеличения пускового момента используется повышение уровня напряжения
питания.
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const.
Характер зависимости напряжения питания от частоты для этого случая показан
на нижнем рисунке. При регулировании в области малых частот максимальный
момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения
и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность
одновременного управления группой электродвигателей.
27. Преобразователи с непосредственной связью
Исторически первыми появились преобразователи снепосредственной связью, в которых силовая часть представляет собой
управляемый выпрямитель и выполнена на не запираемых тиристорах.
Система управления поочередно отпирает группы тиристотров и
подключает статорные обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя
формируется из «вырезанных» участков синусоид входного напряжения.
На рисунке показан пример формирования выходного напряжения для
одной из фаз нагрузки. На входе преобразователя действует трехфазное
синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет
несинусоидальную «пилообразную» форму, которую условно можно
аппроксимировать синусоидой (утолщенная линия). Из рисунка видно,
что частота выходного напряжения не может быть равна или выше
частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как
следствие малый диапазон управления частоты вращения двигателя (не
более 1 : 10). Это ограничение не позволяет применять такие
преобразователи в современных частотно регулируемых приводах с
широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует
относительно сложных систем управления, которые увеличивают
стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является
источником высших гармоник, которые вызывают дополнительные потери
в электрическом двигателе, перегрев электрической машины, снижение
момента, очень сильные помехи в питающей сети.
 Применение
Применениекомпенсирующих устройств приводит к повышению стоимости, массы,
габаритов, понижению к.п.д. системы в целом.
Наряду
с
перечисленными
недостатками
преобразователей с непосредственной связью, они имеют определенные
достоинства. К ним относятся:
практически самый высокий КПД относительно других
преобразователей (98,5% и выше),
способность работать с большими напряжениями и токами, что
делает возможным их использование в мощных высоковольтных
приводах,
относительная дешевизна, несмотря на увеличение абсолютной
стоимости за счет схем управления и дополнительного оборудования.
Подобные схемы преобразователей используются в
старых приводах и новые конструкции их практически не
разрабатываются.
28. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
29. Преобразователи с явно выраженным звеном постоянного тока на тиристорах
Наиболее широкое применение в современныхчастотно
регулируемых
приводах
находят
преобразователи с явно выраженным звеном
постоянного тока.
 В преобразователях этого класса
В преобразователях этого классаиспользуется двойное преобразование электрической
энергии: входное синусоидальное напряжение с
постоянной амплитудой и частотой выпрямляется в
выпрямителе (В), фильтруется фильтром (Ф),
сглаживается,
а
затем
вновь
преобразуется
инвертором (И) в переменное напряжение изменяемой
частоты и амплитуды. Двойное преобразование
энергии приводит к снижению к.п.д. и к некоторому
ухудшению
массогабаритных
показателей
по
отношению к преобразователям с непосредственной
связью.
Для
формирования
синусоидального
переменного напряжения используются автономные
инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах
применяются запираемые тиристоры GTO и их
усовершенствованные модификации GCT, IGCT, SGCT,
и биполярные транзисторы с изолированным затвором
IGBT.
Главным
достоинством
тиристорных
преобразователей частоты, как и в схеме с
непосредственной связью, является способность
работать с большими токами и напряжениями,
выдерживая при этом продолжительную нагрузку и
импульсные воздействия.
 Они имеют более высокий
Они имеют более высокийКПД (до 98%) по отношению к преобразователям на
IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в
настоящее время занимают доминирующее положение
в высоковольтном приводе в диапазоне мощностей от
сотен киловатт и до десятков мегаватт с выходным
напряжением 3 — 10 кВ и выше. Однако их цена на один
кВт выходной мощности самая большая в классе
высоковольтных преобразователей.
30. Изменение частоты и амплитуды
В инверторе осуществляется преобразованиепостоянного напряжения ud
в трехфазное (или
однофазное) импульсное напряжение uи изменяемой
амплитуды и частоты. По сигналам системы управления
каждая обмотка электрического двигателя подсоединяется
через соответствующие силовые транзисторы инвертора к
положительному и отрицательному полюсам звена
постоянного тока.
Длительность подключения каждой обмотки в
пределах периода следования импульсов модулируется по
синусоидальному закону.
 Наибольшая ширина импульсов
Наибольшая ширина импульсовобеспечивается в середине полупериода, а к началу и
концу полупериода уменьшается. Таким образом, система
управления
обеспечивает
широтно-импульсную
модуляцию (ШИМ) напряжения, прикладываемого к
обмоткам двигателя. Амплитуда и частота напряжения
определяются
параметрами
модулирующей
синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц)
обмотки двигателя вследствие их высокой индуктивности
работают как фильтр. Поэтому в них протекают
практически синусоидальные токи.
В схемах преобразователей с управляемым
выпрямителем изменение амплитуды напряжения uи
может достигаться регулированием величины постоянного
напряжения ud, а изменение частоты – режимом работы
инвертора.
При необходимости на выходе автономного
инвертора устанавливается фильтр для сглаживания
пульсаций тока. В схемах преобразователей на IGBT в
силу низкого уровня высших гармоник в выходном
напряжении
потребность
в
фильтре
практически
отсутствует.
Таким образом, на выходе преобразователя
частоты формируется трехфазное (или однофазное)
переменное
напряжение
изменяемой
частоты
и
амплитуды (Uвых = var, fвых = var).
31. Структура преобразователя частоты
Большинство современныхпреобразователей частоты построено
по схеме двойного преобразования.
Они состоят из следующих основных
частей:
— звена постоянного тока
-силового трехфазного импульсного
инвертора
-системы управления
Звено постоянного тока
состоит из неуправляемого
выпрямителя и фильтра.
Переменное напряжение питающей
сети (L1, L2, L3) преобразуется в нем
в напряжение постоянного тока (+, -).
Силовой трехфазный
импульсный инвертор состоит из
шести транзисторных ключей
соединенных по схеме приведенной
выше. Каждая обмотка двигателя
подсоединяется через
соответствующий ключ к
положительному и отрицательному
полюсу звена постоянного тока.
Инвертор осуществляет
преобразование напряжения
постоянного тока в трехфазное
переменное напряжение изменяемой
частоты и амплитуды (U, V, W),
управляющее двигателем.

Система управления
осуществляет управление силовым
инвертором.
32. Двухтрансформаторная схема высоковольтного преобразователя частоты
В схеме преобразователя осуществляется двойнаятрансформация напряжения с помощью понижающего (Т1) и
повышающего (Т2) высоковольтных трансформаторов.
Двойная трансформация позволяет использовать для
регулирования частоты относительно дешевый низковольтный
преобразователь частоты, структура которого представлена
на предыдущем сайте.
Преобразователи
отличают
относительная
дешевизна и простота практической реализации. Вследствие
этого они наиболее часто применяются для управления
высоковольтными
электродвигателями
в
диапазоне
мощностей до 1 – 1,5 МВт. При большей мощности
электропривода трансформатор Т2 вносит существенные
искажения в процесс управления электродвигателем.
Основными
недостатками
двухтрансформаторных
преобразователей являются высокие массогабаритные
характеристики, меньшие по отношению к другим схемам КПД
(93 – 96%) и надежность.

Преобразователи, выполненные
по этой схеме,
имеют ограниченный диапазон регулирования частоты
вращения двигателя как сверху, так и снизу от номинальной
частоты.
При снижении частоты на выходе преобразователя
увеличивается насыщение сердечника и нарушается
расчетный режим работы выходного трансформатора Т2.
Поэтому, как показывает практика, диапазон регулирования
ограничен в пределах nном>n>0,5nном. Для расширения
диапазона регулирования используют трансформаторы с
увеличенным сечением магнитопровода, но это увеличивает
стоимость, массу и габариты.
При увеличении выходной частоты растут потери в
сердечнике трансформатора Т2 на перемагничивание и
вихревые токи.
В приводах мощностью более 1 МВт и напряжении
низковольтной части 0,4 – 0,6 кВ сечение кабеля между
преобразователем частоты и низковольтной обмоткой
трансформаторов должно быть рассчитано на токи до
килоампер, что увеличивает массу преобразователя.

33. Преобразователь частоты высоковольтный многоуровневый «Электротекс»
Для получения высокого коэффициента мощности преобразователя входной трансформатор выполнен посхеме “треугольник-звезда зигзаг“. Применение столь сложной конструкции трансформатора позволило осуществить
фазовый поворот питающих напряжений ячеек с шагом 10 электрических градусов. Созданная трансформаторная
система позволила создать три группы из шести источников трехфазного напряжения, имеющие фазовые сдвиги минус
25, минус 15, минус 5, плюс 5, плюс 15, плюс 25 электрических градусов по отношению к питающей сети.
Использование трансформатора с фазовращением, в сочетании с синтезированным алгоритмом управления
инверторными ячейками, позволило получить практически синусоидальную форму входного тока преобразователя даже
при использовании шестипульсного входного выпрямителя ячейки. Высокий коэффициент мощности преобразователя
по отношению к питающей сети позволяет использовать в качестве источника энергии автономные генераторы, не
создавая избыточного запаса по реактивной мощности источника.

Питание ячеек осуществляется с помощью многообмоточного трансформатора. При этом каждая ячейка
представляет собой независимый источник переменного управляемого напряжения с возможностью работы с ШИМ.
Полученные источники управляемого переменного напряжения соединяются последовательно в звенья, формируя фазу
выходного напряжения. Построение трехфазной системы питания асинхронного двигателя производится включением
звеньев в “звезду”. Структурная схема преобразователя приведена на рисунке.
34. Распределение напряжений преобразователя частоты высоковольтного многоуровневого Электротекс
Сравнительно низкое напряжение элементарной ячейки преобразователя в комплексе скомбинированной системой управления, построенной с использованием новейших сигнальных
процессоров, позволяет получить форму напряжения на выходе многоуровневого преобразователя
близкую к синусоиде, значительно снизить коммутационные нагрузки на полупроводниковые
компоненты, улучшить гармонический состав тока, практически исключить коммутационные
перенапряжения на обмотках двигателя.

Улучшение гармонического состава позволит значительно уменьшить потери в электроприводе,
позволит не накладывать ограничения на длину кабеля подключения. Применение сигнальных
процессоров дает возможность построить адаптивный алгоритм управления, что позволит расширить
рамки применения высоковольтного регулируемого асинхронного электропривода.
35. Основные технические данные и характеристики EK-AV6-1,2-AF-I6-УХЛ4
36. Свойства EK-AV6-XX-ХF-IX
—При использовании преобразователей частоты EK-AV6-XX-ХF-IX:
отсутствуют значительные гармонические помехи в питающей сети;
не нужны силовые фильтры в цепи ПЧ — АД;
длина кабелей от ПЧ к двигателю может достигать 2 км;
коэффициент полезного действия составляет не менее 0,97 при
частоте вращения близкой к номинальной;
возможно динамическое торможение двигателя (подача
постоянного тока в статор) и выбегом;
не требуется подбор специальных двигателей с повышенным
классом изоляции, нагрев двигателя не выходит за рамки
обычного;
возможно восстановление работоспособности ПЧ в короткий срок
без использования специального инструмента (замена ячейки
возможна менее чем за 30 минут).
EK-AV6-XX-ХF-IX выполняется с полностью цифровым
управлением, может применяться в автоматизированном
производстве, управляться и контролироваться системой
управления верхнего уровня.
EK-AV6-XX-ХF-IX обладает полностью модульной
структурой. Поврежденный модуль может быть легко и быстро
заменен. Вышедшая из строя ячейка автоматически отключается
без вмешательства оператора, при этом отдаваемая мощность
привода падает на 10% (для ПЧ на 6 кВ).
Силовые модули имеют повышенную надежность, так как
в цепи постоянного тока используются полипропиленовые
конденсаторы, которые имеют 100000 часов наработку на отказ
(10-12 лет, при этом электролитические конденсаторы рассчитаны
на 5-7 лет работы). Каждая силовая ячейка имеет три датчика
температуры, которые выводят информацию о температуре всех
модулей в реальном масштабе времени и отключают любой из них
при превышении рабочей температуры выше установленной, а
также оптимизируют работу системы охлаждения, тем самым,
продлевая ресурс вентиляторов.

Таким образом, любой из модулей может быть исключен
из общего ряда формирования фазного напряжения с понижением
нагрузки привода не более 10%. Информация о токах,
напряжениях, формируемой мощности ячейки и данные о
температуре передаются контроллером управления модуля по
оптоволоконному кабелю в шкаф управления. В каждом силовом
модуле имеется все необходимые защиты, функционирующие
независимо от основной системы управления ЧРП, даже при
обрыве оптоволоконной связи.
37. Структурная схема системы управления ПЧ
38. Широтно-импульсная модуляция напряжения в преобразователях частоты (2)
Если частота переключенийсиловых транзисторов в инверторе
будет
существенно больше частоты
среза фазы двигателя, то фаза будет
эффективно
фильтровать
прикладываемое к ней напряжение в
получаемый в фазе ток, как показано на
верхнем рисунке.
Интервал времени нахождения
ключа в проводящем состоянии по
отношению к периоду
широтноимпульсной
модуляции
называют
скважностью
S = TШИМ /tим=1/D
Если скважность ключа
в
каждой
фазе
менять
по
синусоидальному закону, то так же
будет меняться и среднее значение
напряжения фазы на периоде.
Применение инверторов с
широтно-импульсной
модуляцией
напряжения позволяет достигать КПД
преобразователя частоты более 95%,
что
было
бы
невозможно
при
использовании
транзисторов
в
линейном (а не ключевом) режиме.
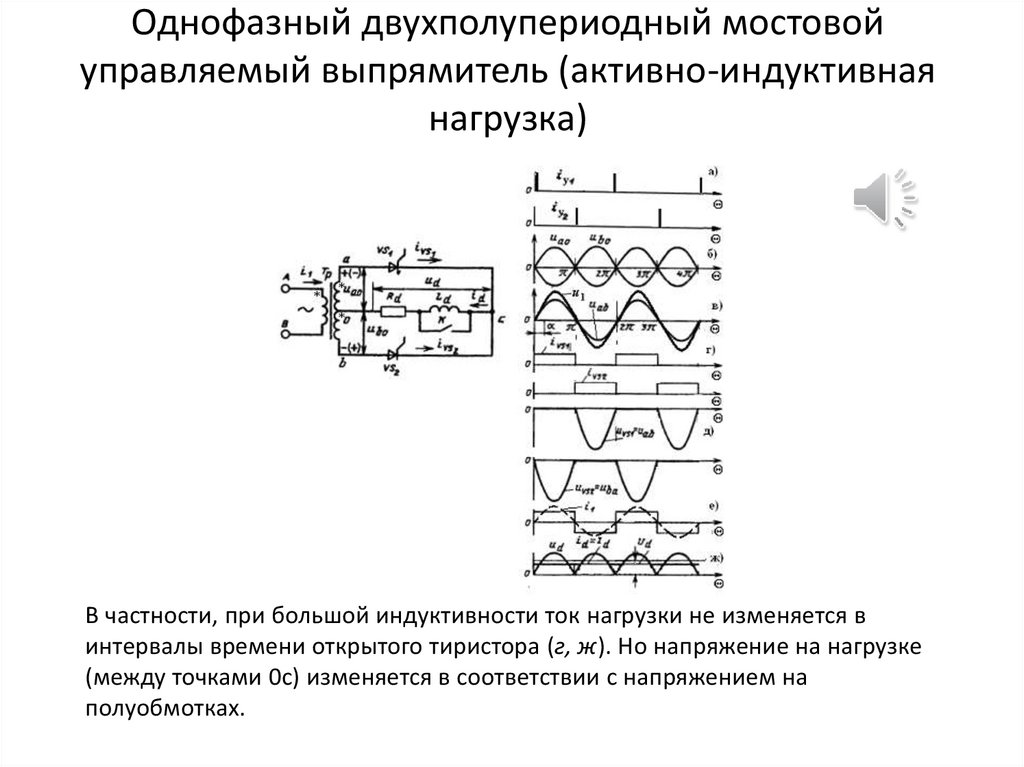
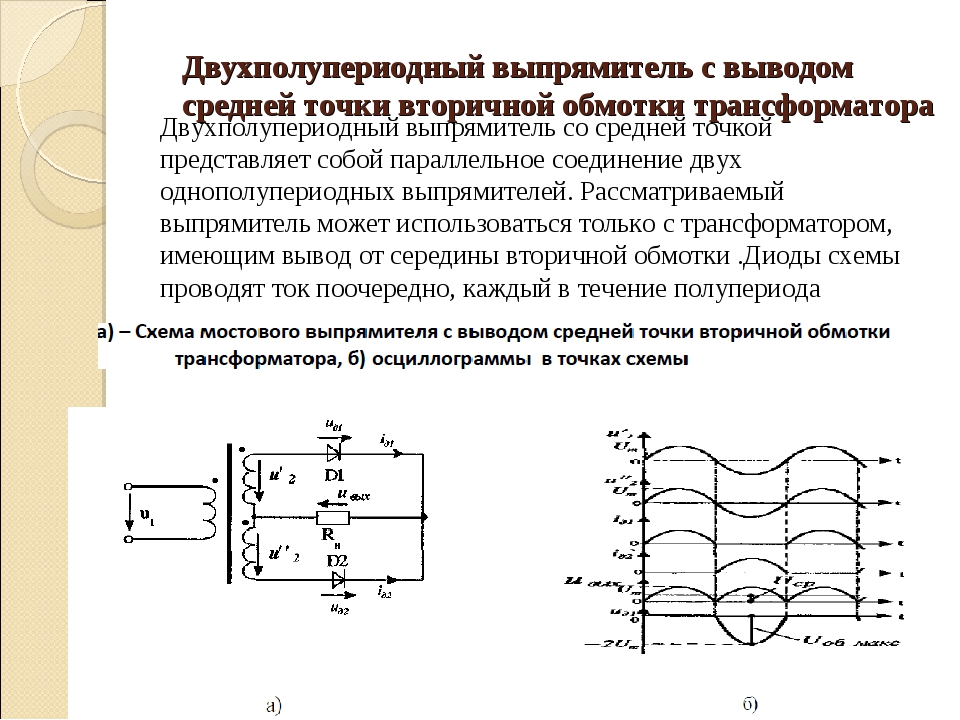
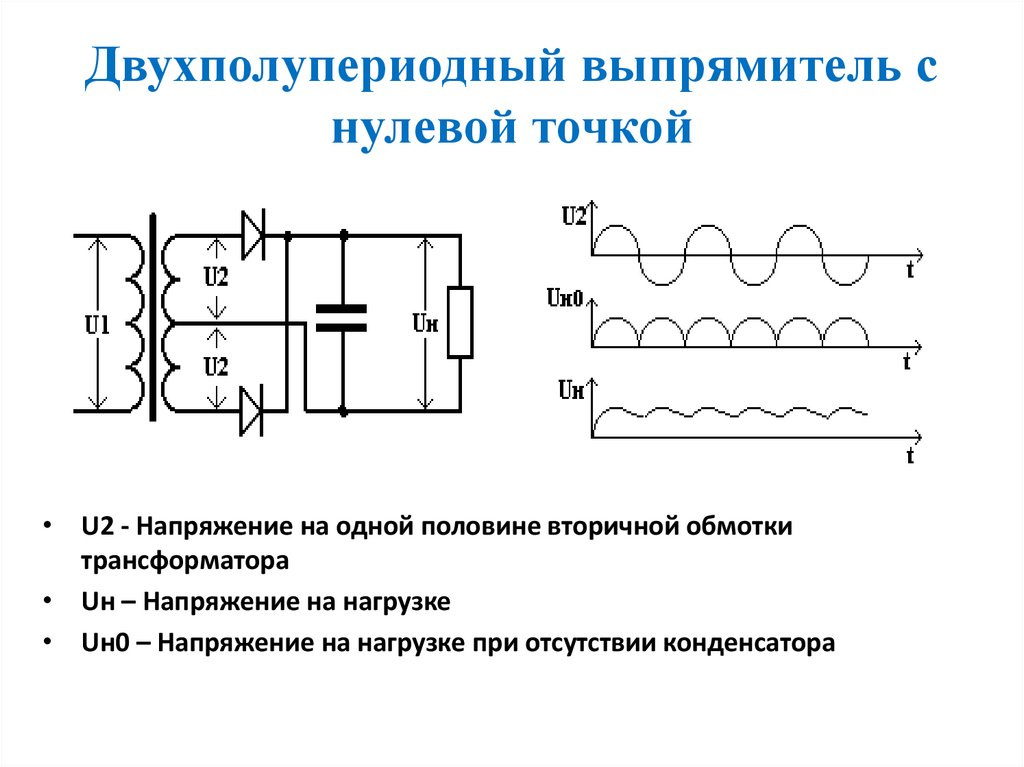
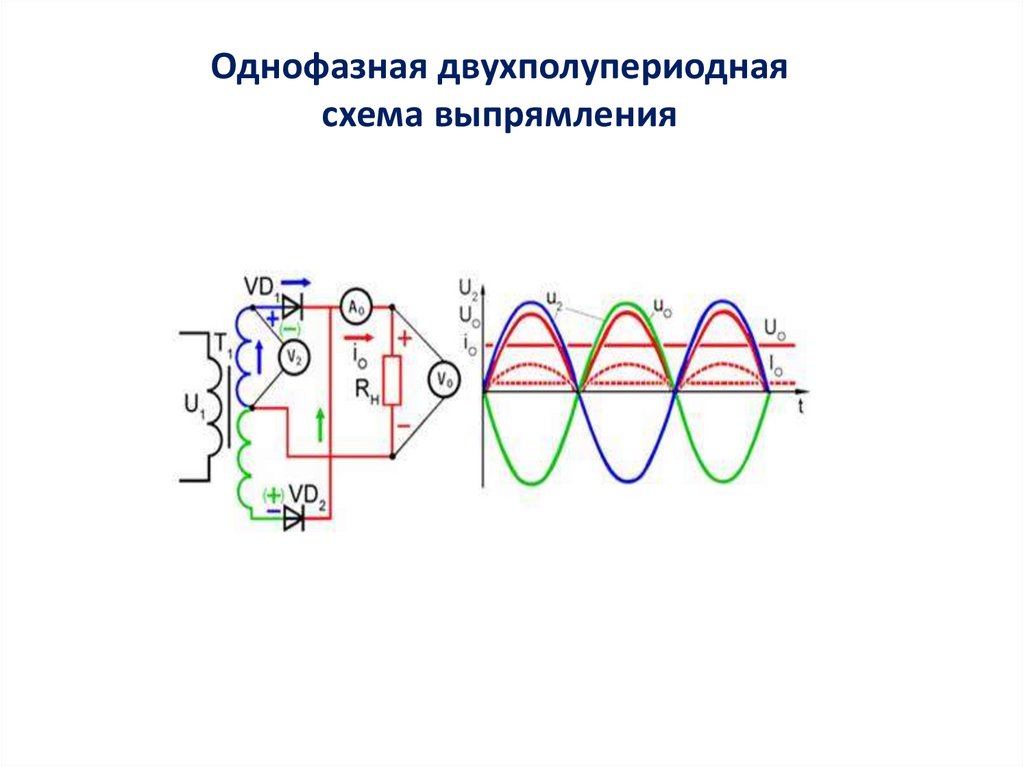
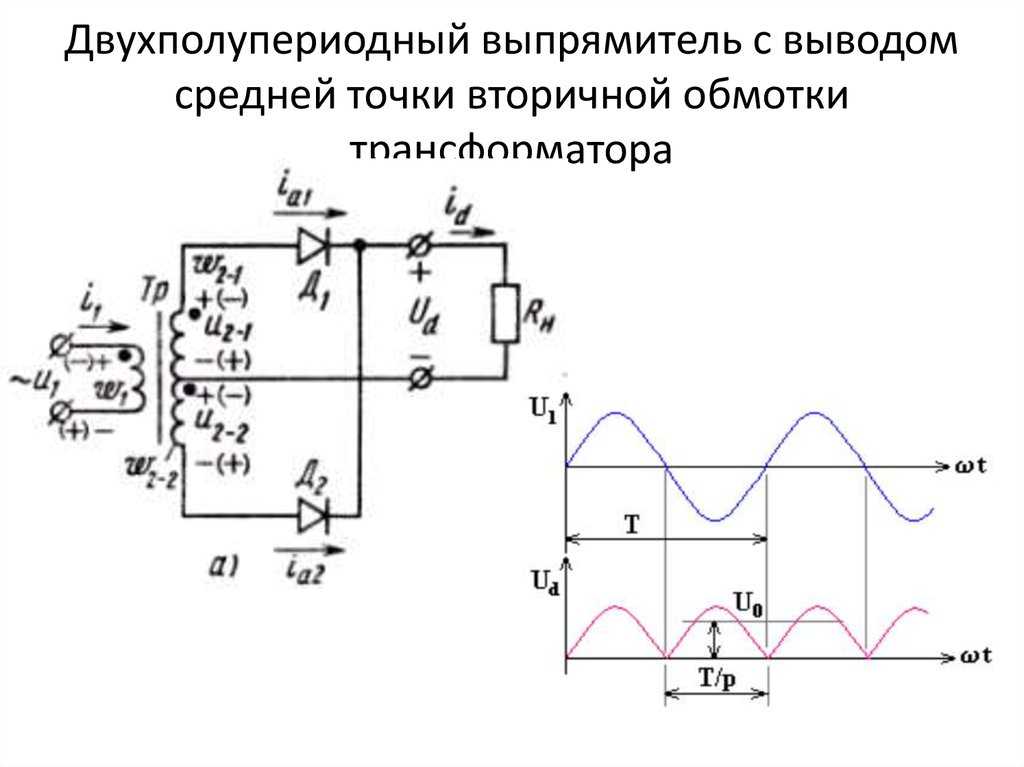
Однофазная двухполупериодная схема управляемого выпрямителя со средней точкой
Схема однофазного двухполупериодного управляемого выпрямителя приведена на рис. 3.1, а. Рассмотрим сначала процессы в выпрямителе при активной нагрузке (ключ К замкнут). В отличие от диодов VD1 и VD2 (см. риc. 1.1, а) тиристоры VS1 и VS2 проводят ток только с момента подачи на их управляющие электроды импульсов (рис. 3.1, б), смещенных в общем случае на угол α относительно момента перехода через нуль кривых напряжения u2ф вторичной обмотки трансформатора.
Угол α называется углом управления (регулирования, зажигания). В положительный полупериод напряжения u2ф тиристор VS1 включится с задержкой, определяемой углом θ1= α (рис.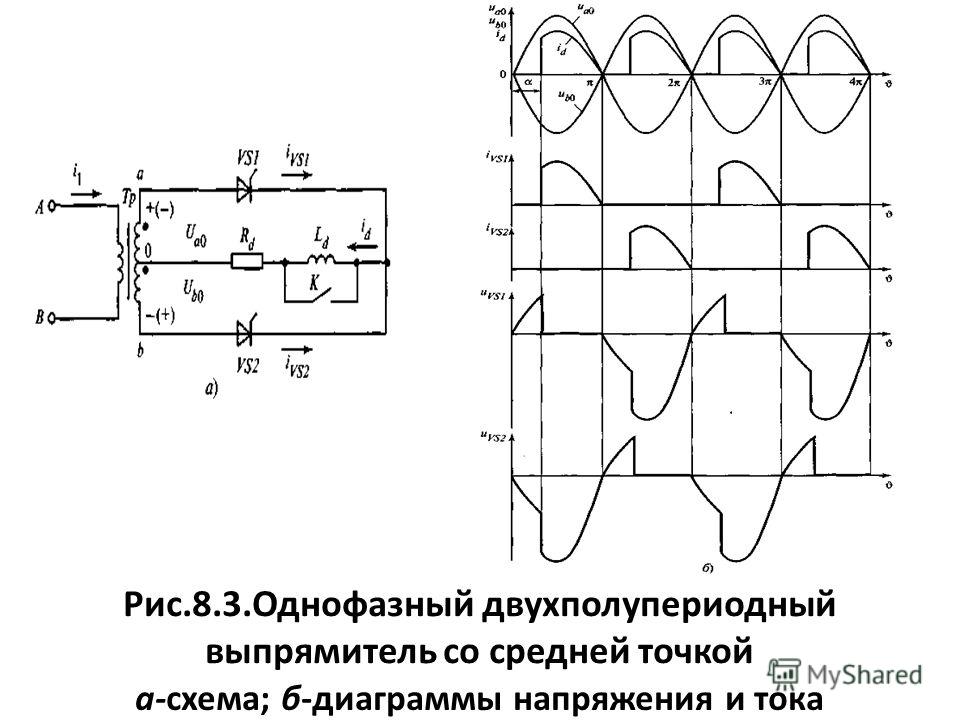 3.1, б). С этого момента напряжение на нагрузке ud возрастет скачком
3.1, б). С этого момента напряжение на нагрузке ud возрастет скачком
на величину Udнач и затем будет изменяться по синусоиде в соответствии с кривой напряжения u2ф. При θ = θ2 напряжение на аноде VS1 изменяет знак, и он выключается.
В интервале θ3 – θ2 = φ оба тиристора VS1 и VS2 находятся в закрытом состоянии, ud = 0, id = 0. В момент θ= θ3 управляющий импульс подается на тиристор VS2, и он включается. Напряжение ud и ток id нагрузки изменяются, как и в первом случае (рис. 3.1,б). При θ = θ4 заканчивается первый полупериод напряжения сети, и далее процесс работы схемы на новом полупериоде повторяется. Кривая idполностью повторяет форму выпрямленного напряжения.
На рис. 3.1, г показана кривая мгновенного напряжения на тиристоре (uVS1). До момента θ = θ1 = α к тиристору VS1 приложено прямое напряжение (uпр).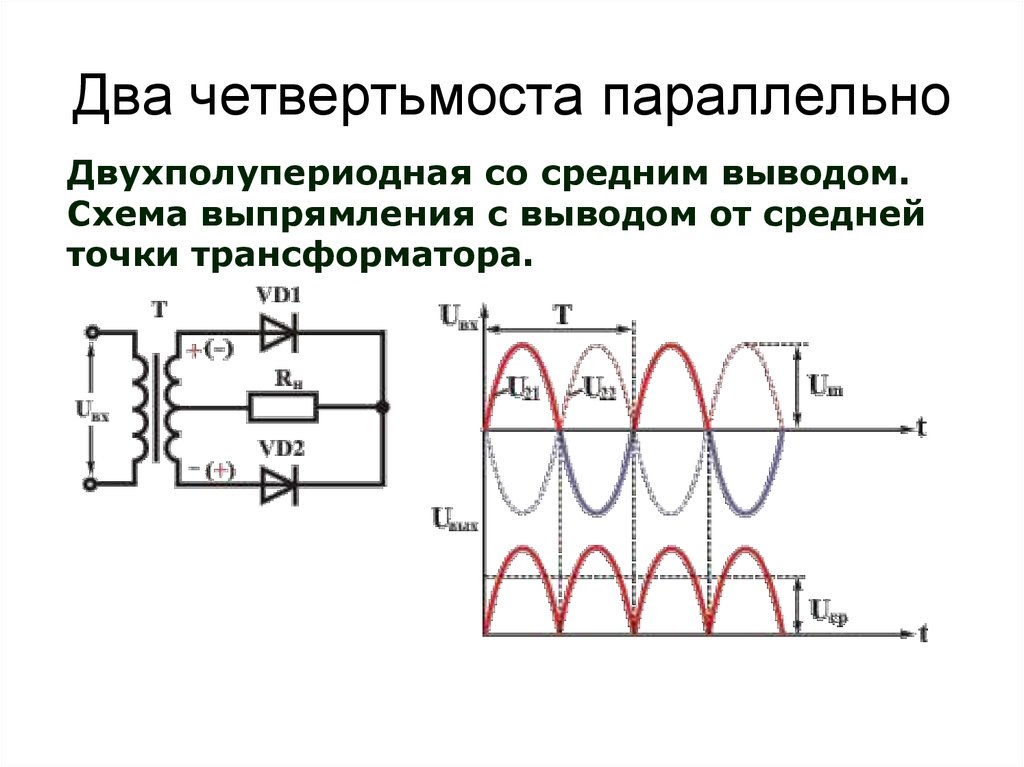 В интервале θ2 –θ1 тиристор VS1 открыт, и напряжение на нем равно нулю (uпр = 0). При θ = θ2 тиристор закрывается, и к нему прикладывается обратное напряжение, равное фазному u2ф, так как в это время тиристор VS2 также закрыт.
В интервале θ2 –θ1 тиристор VS1 открыт, и напряжение на нем равно нулю (uпр = 0). При θ = θ2 тиристор закрывается, и к нему прикладывается обратное напряжение, равное фазному u2ф, так как в это время тиристор VS2 также закрыт.
В момент θ = θ3 после открытия тиристора VS2 к тиристору VS1 прикладывается линейное напряжение вторичной обмотки (2u2ф). Через интервал θ = θ4 на тиристоре VS1 начнет нарастать положительное напряжение, и процессы повторяются.
Среднее значение выпрямленного напряжения находится по формуле:
(3.1)
Умножим числитель и знаменатель выражения (3.1) на два, получим:
(3.2)
где – значение Ud при α = 0.
Зависимость, определяемая выражением (3.2), называется регулировочной
характеристикой управляемого выпрямителя. При активной нагрузке предельный угол регулирования, при котором Ud = 0, равен: α = 180°.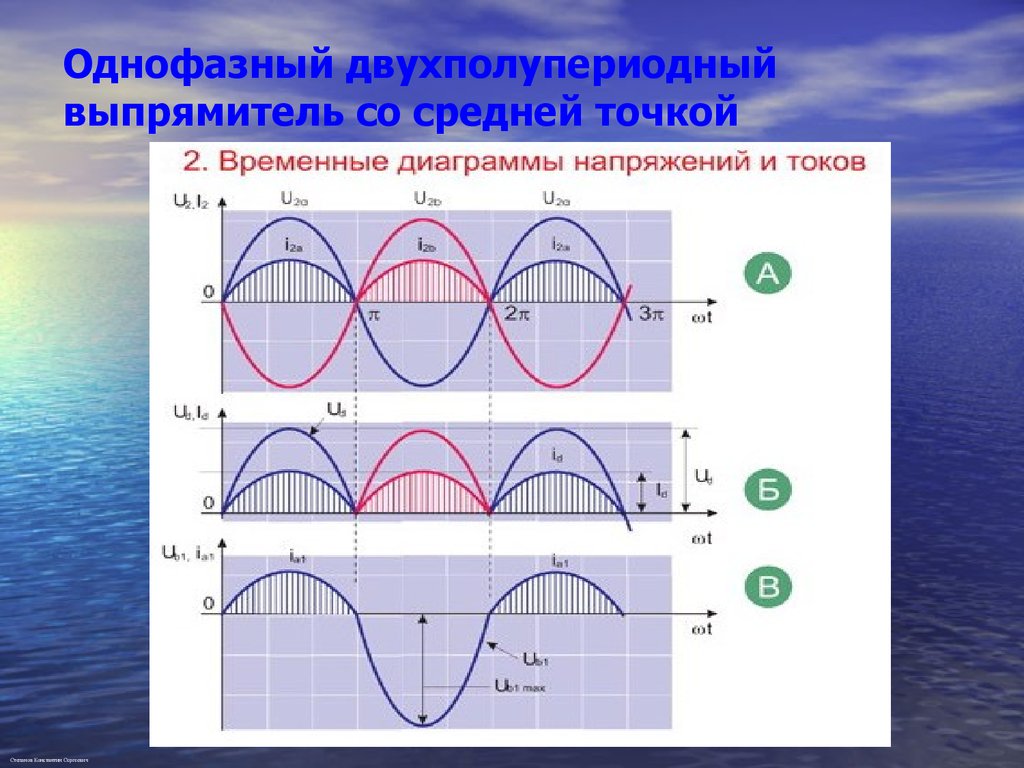 Ток в нагрузке носит прерывистый характер. Максимальное напряжение Uобр м зависит от угла α и имеет наибольшее значение при α = 90°.
Ток в нагрузке носит прерывистый характер. Максимальное напряжение Uобр м зависит от угла α и имеет наибольшее значение при α = 90°.
Кривая напряжения на тиристоре VS2 такая же, как на VS1 (рис. 3.1, г), но смещена на 180°. Форма тока первичной обмотки трансформатора (i1) при активной нагрузке выпрямителя изображена заштрихованной площадью (см. рис. 3.1, г).
При работе выпрямителя на обмотку возбуждения МПТ процессы в схеме существенно отличаются (см. рис. 3.1, а, ключ К разомкнут). Тиристор VS1, вступив в работу при θ = θ1, будет проводить ток вплоть до момента θ = θ3 (рис. 3.1, д, е) пока не включится тиристор VS2, даже при отрицательном напряжении на VS1 в интервале θ3 – θ2. В этом промежутке ток через тиристор и нагрузку поддерживается за счет электромагнитной энергии, запасенной в индуктивности Lв. Средняя величина выпрямленного напряжения Ud определяется суммой заштрихованных площадей в положительный и отрицательный полупериоды вторичного напряжения (u2ф) (см. рис. 3.1, д):
рис. 3.1, д):
откуда
. (3.3)
Из выражения (3.3) видно, что предельным углом регулирования (при котором Ud = 0) является α м = 90°.
В интервале 0 – θ1 провод
Электрическая революция
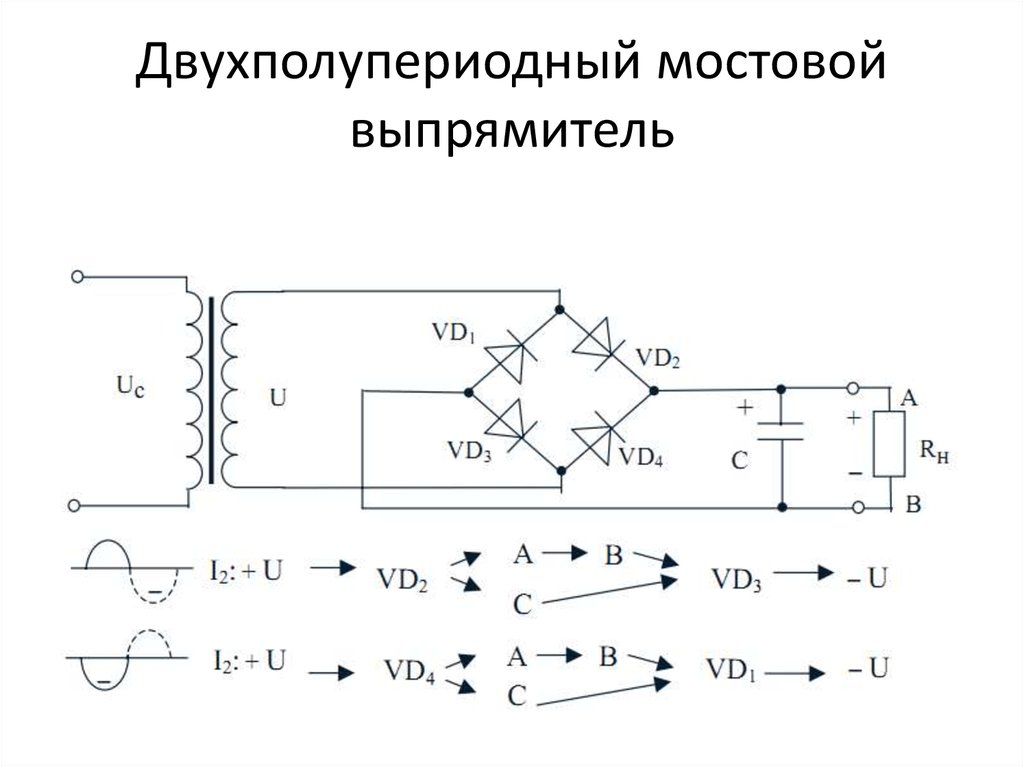
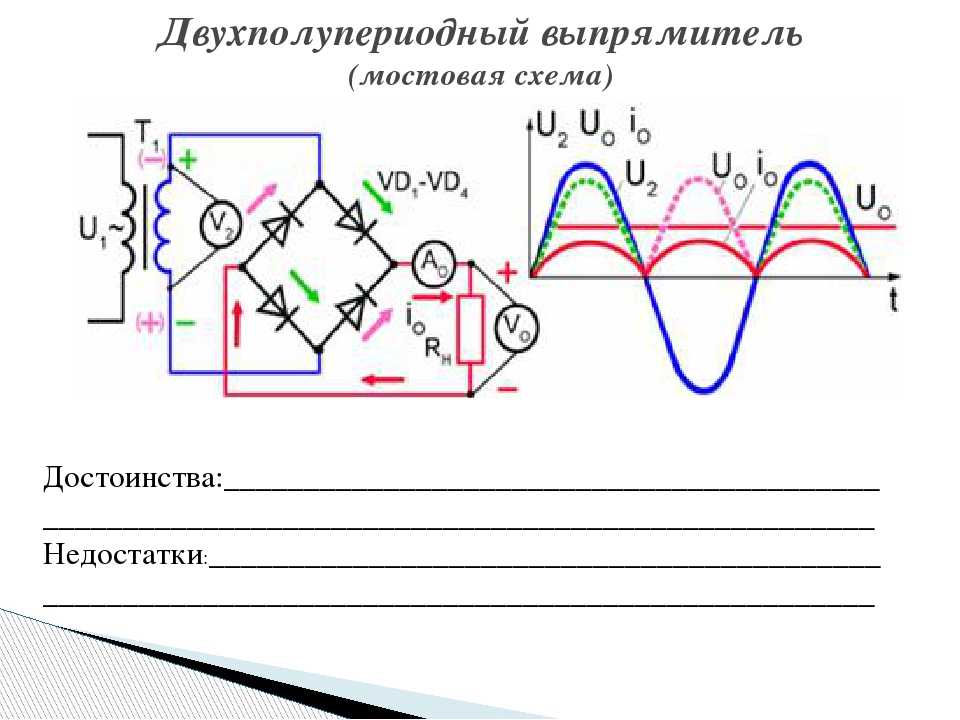
В Эта теория описывает работу однофазного двухполупериодного мостового выпрямителя.
Мост Описание схемы выпрямителя
- Имеется четыре диода D1, D2, D3 и D4 подключен в конфигурации моста.
- Нарезание резьбы по центру не требуется трансформатор, как это требуется в однофазном однополупериодном выпрямителе.
- переменное питание через понижающий трансформатор подается по диагонали противоположный конец AC и нагрузка подключены к двум другим концам BD.
Работа мостового выпрямителя
Положительный полупериода
- Конец П вторичной обмотки
трансформатор становится P, тогда как S становится отрицательным во время положительного полупериода
переменная подача.

- Это сделает диоды D2 и D4 смещенными в прямом направлении и через них течет ток.
- Ток, протекающий по пути P – A – D2 – B – Q – НАГРУЗКА – R – D – D4 – C – S.
- Поскольку имеются два диода D2 и D4, проводящие и оба последовательно, напряжение, доступное на нагрузке, равно вторичному напряжение обмотки минус падение напряжения на диодах D2 и D4.
- Диод D1 и D3 остается в состоянии обратного смещения в течение положительного полупериода переменная подача.

Напряжение нагрузки = вторичная обмотка трансформатора Voltage
– Падение напряжения на диод D2
– Падение напряжения на диод D4
Падение напряжения на диоде = 0,7 В для Кремний
= 0,3 В для германия
Отрицательный полупериод
- Конец S становится положительным с
относительно конца P вторичной обмотки трансформатора.
- Это сделает диод D1 и D3 смещены в прямом направлении и через них протекает ток.
- Текущий ток через путь S – C – D3 – B – Q – LOAD – R – D – D1 – A – P.
- Так как есть два диоды D1 и D3 открыты, и оба включены последовательно, напряжение, доступное на нагрузка равна напряжению вторичной обмотки минус падение напряжения на диодах D1 и Д3.
- Диоды D2 и D4 остаются в состоянии обратного смещения во время положительный полупериод переменного питания.
– Падение напряжения на диод D1
– Падение напряжения на диод D3
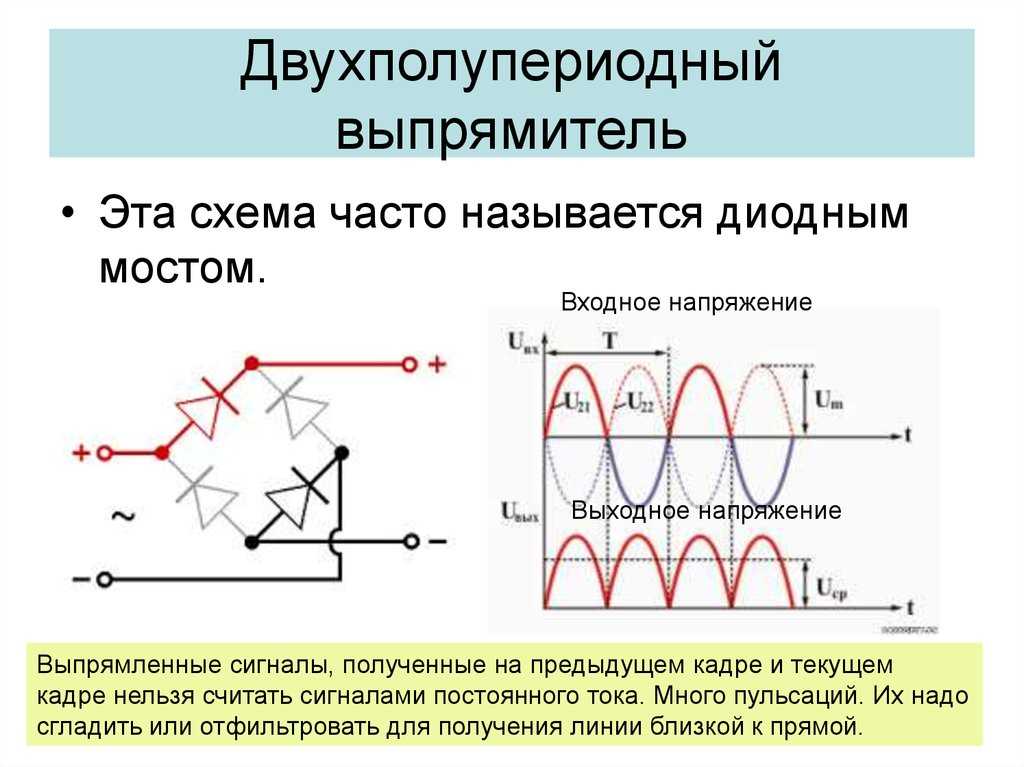
Преимущества мостового выпрямителя
- Нет необходимости в трансформаторе с центральным отводом
- Пиковое обратное напряжение составляет половину к однофазной полной волне
- Выпрямитель
- Низкий коэффициент пульсаций
Недостатки мостового выпрямителя
- Требуется четыре диода
- Два диода
находятся последовательно в течение положительного и отрицательного полупериода переменного
поставлять.
- Низкое выходное напряжение по сравнению с однофазным двухполупериодным выпрямителя из-за падения напряжения на двух диодах.

Почему это называется однофазный двухполупериодный мостовой выпрямитель?
Однофазный – Однофазный питание подается на входе
Полная волна — диоды проводят во время как положительный, так и отрицательный цикл
входного источника питания
Мост – Четыре диода подключены в мостовая конфигурация
Выпрямитель – Преобразует входной переменный ток мощность в выходную мощность постоянного тока.
Однофазный двухполупериодный выпрямитель с резистивной нагрузкой — Обмен файлами
Версия 1.1.0.0 (15,2 КБ) от Çağlar İŞLEK
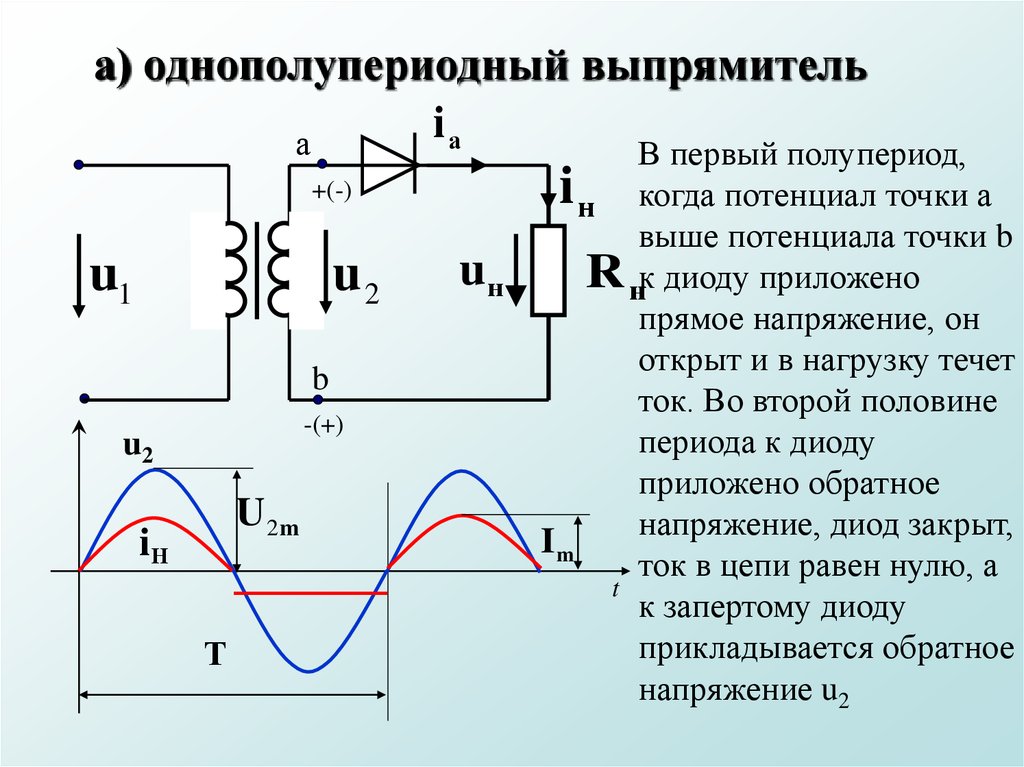
Однофазный выпрямитель
1,2 тыс.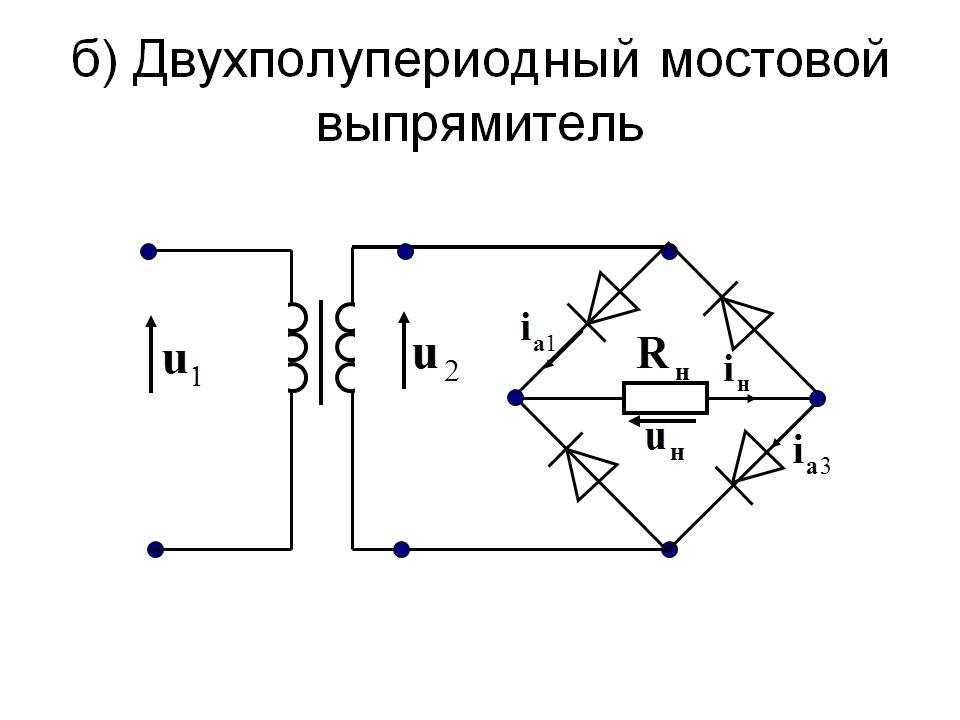 загрузок
За все время: 1199 дюймов>
загрузок
За все время: 1199 дюймов>
Обновлено 12 ноября 2014 г.
Посмотреть лицензию
- Обзор
- Модели
- История версий
- Отзывы (1)
- Обсуждения (0)
4 Выходное напряжение диода, мостового выпрямителя и кривые тока получены в Simulink. Если вы откроете симуляцию, вы увидите 2 окна осциллографа, осциллограф 1 показывает входное и выходное напряжение вместе, осциллограф 2 показывает ток нагрузки. если вы хотите получить графики для расчета среднеквадратичных и средних значений, вы можете использовать векторы fullwave_Is и fullwave_Vo.
Цитировать как
Чаглар ИШЛЕК (2023). Однофазный двухполупериодный выпрямитель с резистивной нагрузкой (https://www.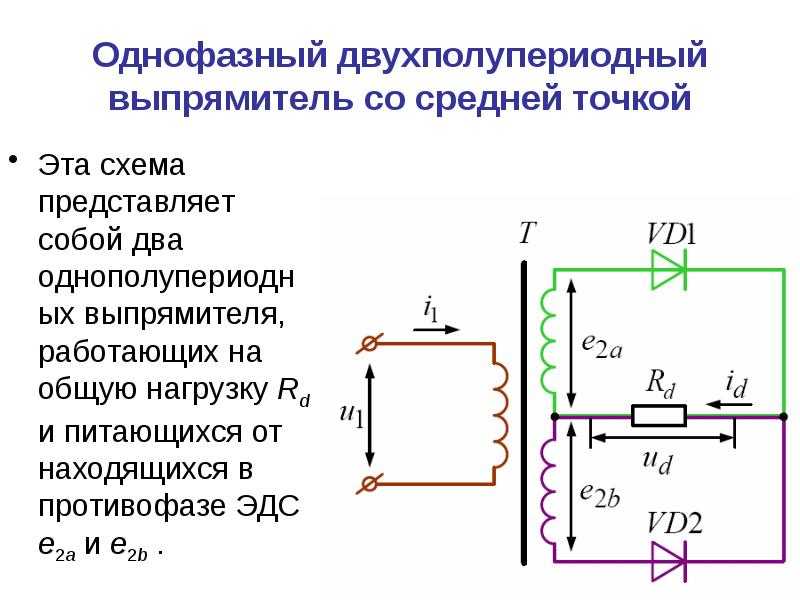
Совместимость версий MATLAB
Created with R2012b
Совместимость с любой версией
Совместимость с платформами
Windows macOS LinuxКатегории
- Физическое моделирование
>
Симскейп Электрик
>
Специализированные энергосистемы
>
- Физическое моделирование > Симскейп Электрик > Библиотеки электрических блоков > Полупроводники и преобразователи >
Теги Добавить теги
выпрямитель силовой электроники Simulink
Благодарности
Вдохновленный: Двухполупериодный выпрямитель
Охота за сокровищами сообщества
Найдите сокровища в MATLAB Central и узнайте, как сообщество может вам помочь!
На охоту!
| Версия | Опубликовано | Примечания к выпуску | |
|---|---|---|---|
1. |