Момент инерции прямоугольного треугольника. Момент инерции
Осевой момент инерции равен сумме произведений элементарных площадок на квадрат расстояния до соответствующей оси.
(8)
Знак всегда «+».
Не бывает равным 0.
Свойство: Принимает минимальное значение, когда точка пересечения координатных осей совпадает с центром тяжести сечения.
Осевой момент инерции сечения применяют при расчетах на прочность, жесткость и устойчивость.
1.3. Полярный момент инерции сечения Jρ
(9)
Взаимосвязь полярного и осевого моментов инерции:
(10)
(11)
Полярный момент инерции сечения равен сумме осевых моментов.
Свойство:
при повороте осей в любую сторону, один из осевых моментов инерции возрастает, а другой убывает (и наоборот). Сумма осевых моментов инерции остается величиной постоянной.
1.4. Центробежный момент инерции сечения Jxy
Центробежный момент инерции сечения равен сумме произведений элементарных площадок на расстояния до обеих осей
(12)
Единица
измерения [см 4 ], [мм 4 ].
Знак «+» или «-».
, если координатные оси являются осями симметрии (пример – двутавр, прямоугольник, круг), или одна из координатных осей совпадает с осью симметрии (пример – швеллер).
Таким образом для симметричных фигур центробежный момент инерции равен 0.
Координатные оси u иv , проходящие через центр тяжести сечения, относительно которых центробежный момент равен нулю, называютсяглавными центральными осями инерции сечения. Главными они называются потому, что центробежный момент относительно них равен нулю, а центральными – потому, что проходят через центр тяжести сечения.
У сечений, не обладающих симметрией относительно осей x
(13)
Центробежный
момент относительно осей u иv —
Формула для определения осевых моментов инерции относительно главных центральных осей u иv :
(14)
где
— осевые моменты инерции относительно
центральных осей,
— центробежный момент инерции относительно
центральных осей.
1.5. Момент инерции относительно оси, параллельной центральной (теорема Штейнера)
Теорема Штейнера:
Момент инерции относительно оси, параллельной центральной, равен центральному осевому моменту инерции плюс произведение площади всей фигуры на квадрат расстояния между осями.
(15)
Доказательство теоремы Штейнера.
Согласно рис. 5 расстояние у до элементарной площадкиdF
Подставляя значение у в формулу, получим:
Слагаемое
,
так как точка С является центром тяжести
сечения (см. свойство статических
моментов площади сечения относительно
центральных осей).
Для прямоугольника высотой h и шириной b :
Осевой момент инерции:
Момент сопротивления изгибу:
момент сопротивления изгибу равен отношению момента инерции к расстоянию наиболее удаленного волокна от нейтральной линии:
т.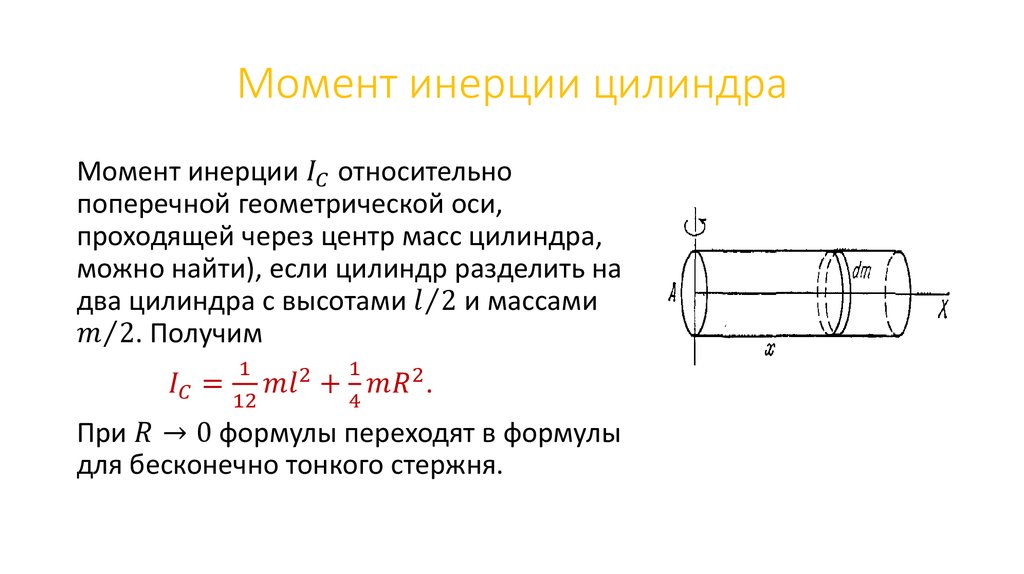 к.
к.
,
то
Для круга:
Полярный
момент инерции:
Осевой
момент инерции:
Момент
сопротивления кручению:
Т.к.
,
то
Момент
сопротивления изгибу:
Пример 2. Определить момент инерции прямоугольного сечения относительно центральной оси С x
Решение. Разобьём площадь прямоугольника на элементарные прямоугольники с размерами b (ширина) иdy (высота). Тогда площадь такого прямоугольника (на рис. 6 заштрихована) равна dF =bdy . Вычислим значение осевого момента инерции J x
По аналогии запишем
— осевой момент инерции сечения относительно центральной
Центробежный момент инерции
, так как оси С x и Сy являются осями симметрии.
Пример 3. Определить полярный момент инерции круглого сечения.
Решение.
радиусом, площадь такого кольца
. Подставляя значение
в выражение для полярного момента инерции интегрируя, получим
Учитывая
равенство осевых моментов круглого
сечения
и
, получаем
Осевые моменты инерции для кольца равны
с – отношение диаметра выреза к наружному диаметру вала.
Лекция №2 «Главные оси и главные моменты инерции
Рассмотрим, как изменяются моменты инерции при повороте координатных осей. Положим, даны моменты инерции некоторого сечения относительно осей 0х
(рис. 8)
Так как проекция ломаной линии ОАВС равна проекции замыкающей, находим:
(15)
Исключим uиvв выражениях моментов инерции:
(18)
Рассмотрим два
первых уравнения.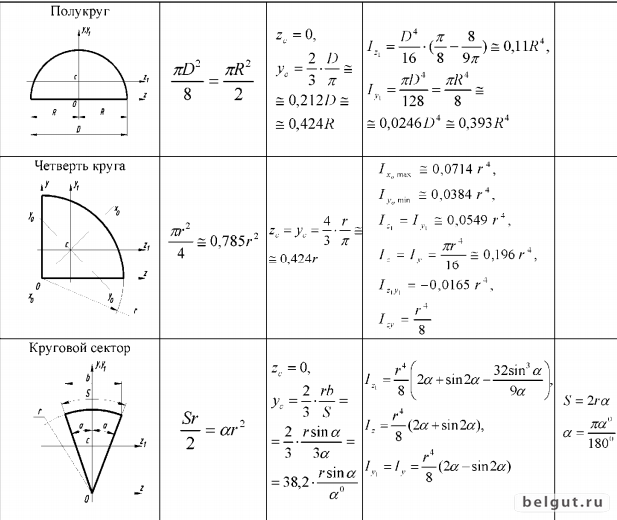 Складывая их почленно,
получим
Складывая их почленно,
получим
Таким
образом, сумма осевых моментов инерции
относительно двух взаимно перпендикулярных
осей не зависит от угла
Где — расстояние от начала координат до элементарной площадки (см. рис.5). Таким образом
Где — уже знакомый нам полярный момент инерции:
Определим осевой момент инерции круга относительно диаметра.
Так
как в силу симметрии
но, как известно,
Следовательно, для круга
С
изменением угла поворота осей
значения моментов именяются, но сумма остается неизменной.
Следовательно существует такое значение
,
при котором один из моментов инерции
достигает своего максимального значения,
в то время как другой момент принимает
минимальное значение. Дифференцируя
выражениепо углу
(19)
При
этом значении угла
один из осевых моментов будет наибольшим,
а другой — наименьшим.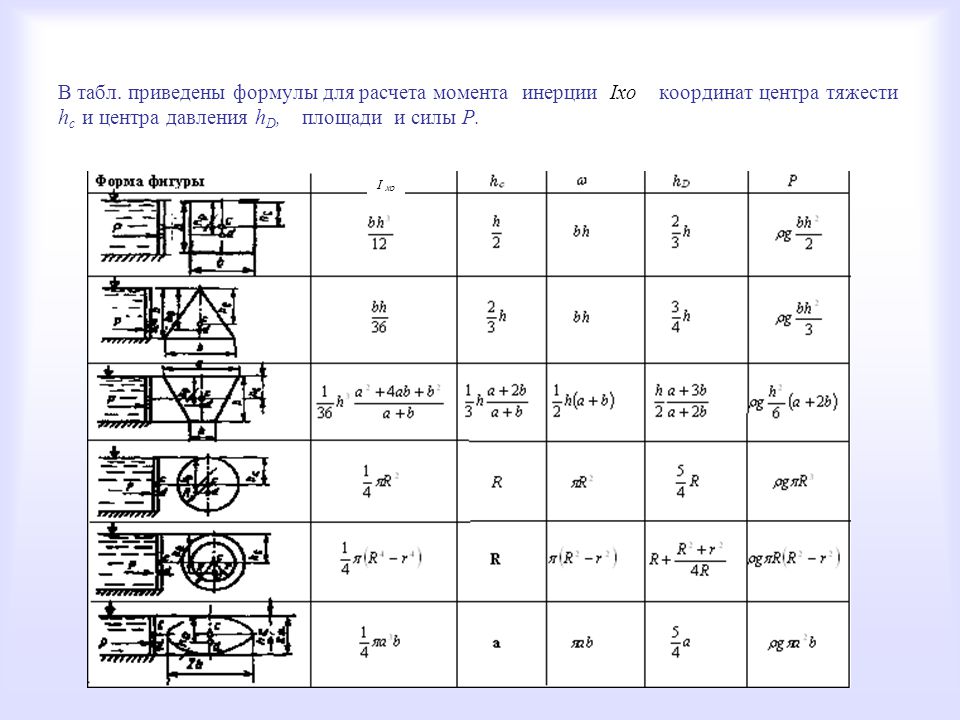
обращается в нуль, что можно легко проверить, приравнивая к нулю формулу для центробежного момента инерции
.
Оси, относительно которых центробежный момент инерции равен нулю, а осевые моменты принимают экстремальные значения, называются главными осями. Если они к тому же являются центральными (точка начала координат совпадает с центром тяжести сечения), то тогда они называютсяглавными центральными осями (u ; v ). Осевые моменты инерции относительно главных осей называются
И их значение определяется по следующей формуле:
(20)
Знак плюс соответствует максимальному моменту инерции, знак минус — минимальному.
Существует ещё одна геометрическая характеристика – радиус инерции сечения. Эта величина часто используется в теоретических выводах и практических расчётах.
Радиусом инерции сечения относительно некоторой оси, например 0 x , называется величина , определяемая из равенства
(21)
F – площадь поперечного сечения,
— осевой момент инерции сечения,
Из определения следует, что радиус инерции равен расстоянию от оси 0
 Зная момент инерции сечения и его
площадь, можно найти радиус инерции
относительно оси 0х :
Зная момент инерции сечения и его
площадь, можно найти радиус инерции
относительно оси 0х :(22)
Радиусы инерции, соответствующие главным осям, называютсяглавными радиусами инерции и определяются по формулам
(23)
Лекция 3. Кручение стержней круглого поперечного сечения.
Введем декартову прямоугольную систему координат O xy . Рассмотрим в плоскости координат произвольное сечение (замкнутую область) с площадью A (рис. 1).
Статическими моментами
Точка C с координатами (x C , y C)
называется центром тяжести сечения .
Если оси координат проходят через центр тяжести сечения, то статические моменты сечения равны нулю:
Осевыми моментами инерции сечения относительно осей x и y называются интегралы вида:
Полярным моментом инерции сечения относительно начала координат называется интеграл вида:
Центробежным моментом инерции сечения называется интеграл вида:
Главными осями инерции сечения
называются две взаимно перпендикулярные оси, относительно которых I xy =0.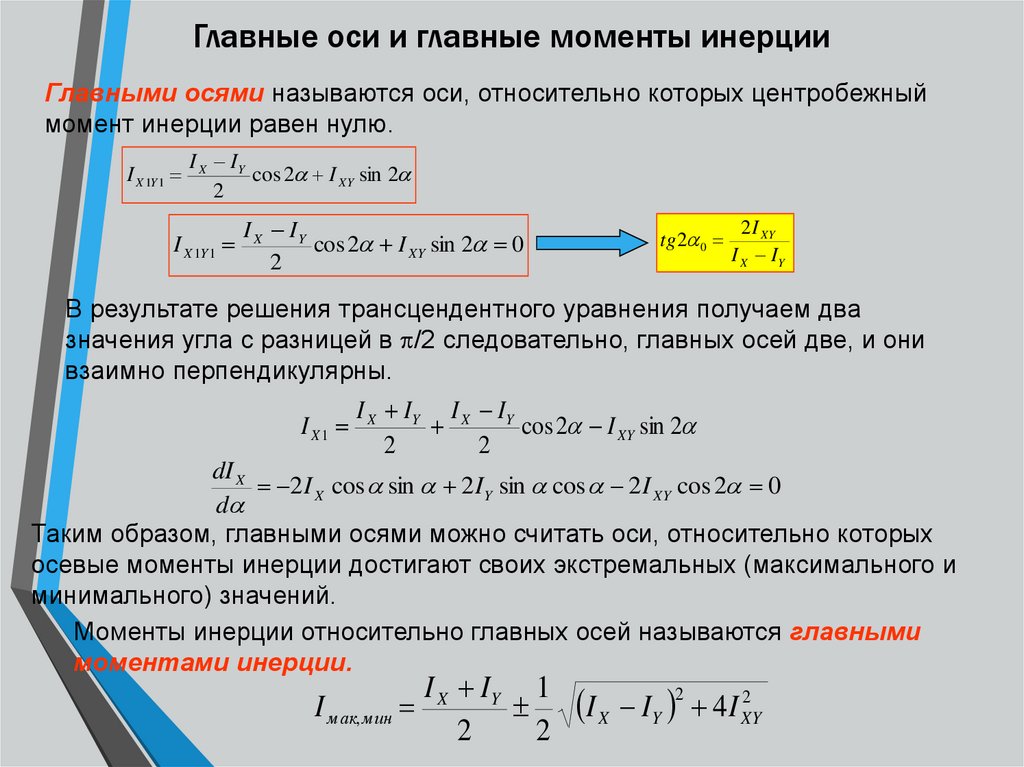 Если одна из взаимно перпендикулярных осей является осью симметрии сечения, то I xy =0 и, следовательно, эти оси — главные. Главные оси, проходящие через центр тяжести сечения, называются главными центральными осями инерции сечения
Если одна из взаимно перпендикулярных осей является осью симметрии сечения, то I xy =0 и, следовательно, эти оси — главные. Главные оси, проходящие через центр тяжести сечения, называются главными центральными осями инерции сечения
2.Теорема Штейнера-Гюйгенса о параллельном переносе осей
Теорема Штейнера-Гюйгенса (теорема Штейнера).
Осевой момент инерции сечения I относительно произвольной неподвижной оси x равен сумме осевого момента инерции этого сечения I с относительной параллельной ей оси x * , проходящей через центр масс сечения, и произведения площади сечения A на квадрат расстояния d между двумя осями.
Если известны моменты инерции I x и I y относительно осей x и y, то относительно осей ν и u, повернутых на угол α, моменты инерции осевые и центробежный вычисляют по формулам:
Из приведенных формул видно, что
Т.е. сумма осевых моментов инерции при повороте взаимно перпендикулярных осей не меняется, т.е.оси u и v, относительно которых центробежный момент инерции сечения равен нулю, а осевые моменты инерции І u и I v имеют экстремальные значения max или min, называют главными осями сечения.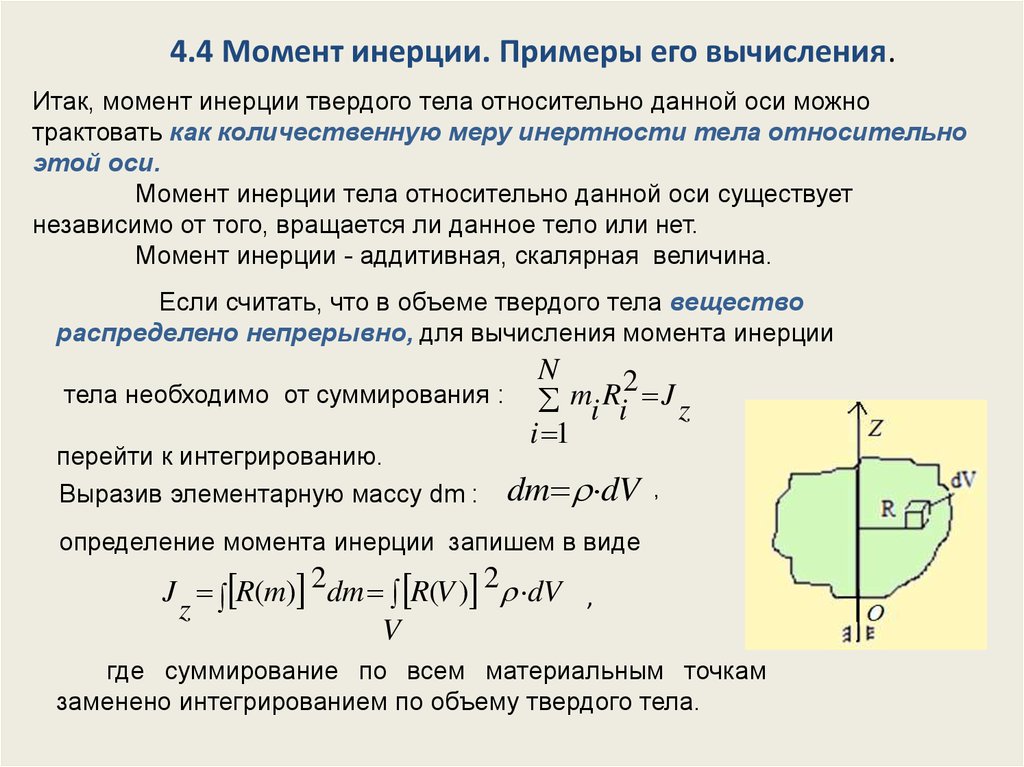 Главные оси, проходящие через центр тяжести сечения, называются главными центральными осями сечения
. Для симметричных сечений оси их симметрии всегда являются главными центральными осями. Положение главных осей сечения относительно других осей определяют, используя соотношение:
Главные оси, проходящие через центр тяжести сечения, называются главными центральными осями сечения
. Для симметричных сечений оси их симметрии всегда являются главными центральными осями. Положение главных осей сечения относительно других осей определяют, используя соотношение:
где α 0 – угол, на который надо развернуть оси x и y, чтобы они стали главными (положительный угол принято откладывать против хода часовой стрелки, отрицательный – по ходу часовой стрелки). Осевые моменты инерции относительно главных осей называются главными моментами инерции :
знак плюс перед вторым слагаемым относится к максимальному моменту инерции, знак минус – к минимальному.
ОПРЕДЕЛЕНИЕ
Осевым (или экваториальным) моментом инерции сечения относительно оси называется величина, которую определяют как:
Выражение (1) обозначает, для вычисления осевого момента инерции берется по всей площади S сумма произведений бесконечно малых площадок () умноженных на квадраты расстояний от них до оси вращения:
Сумма осевых моментов инерции сечения относительно взаимно перпендикулярных осей (например, относительно осей X и Y в декартовой системе координат) дают полярный момент инерции () относительно точки пересечения этих осей:
ОПРЕДЕЛЕНИЕ
Полярным моментом инерции называют момент инерции сечением по отношению к некоторой точке.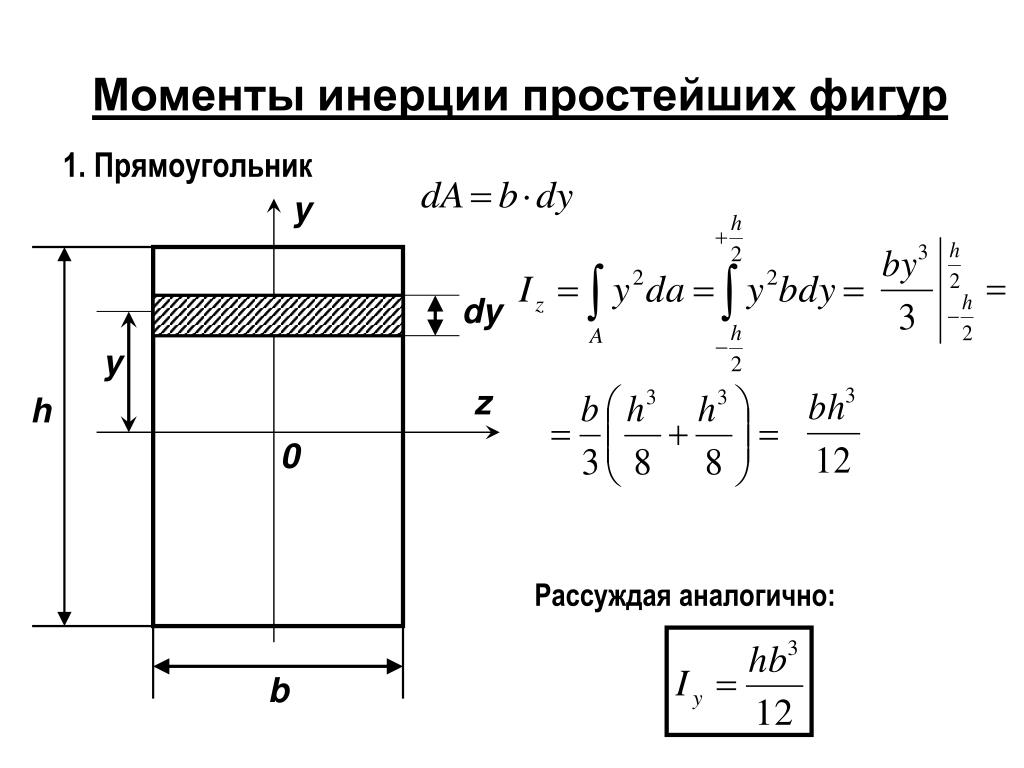
Осевые моменты инерции всегда больше нуля, так как в их определениях (1) под знаком интеграла стоят величина площади элементарной площадки (), всегда положительная и квадрат расстояния от этой площадки до оси.
Если мы имеем дело с сечением сложной формы, то часто при расчетах используют то, что осевой момент инерции сложного сечения по отношению к оси равен сумме осевых моментов инерции частей этого сечения относительно той же оси. Однако следует помнить, что нельзя суммировать моменты инерции, которые найдены относительно разных осей и точек.
Осевой момент инерции относительно оси проходящей через центр тяжести сечения имеет наименьшее значение из всех моментов относительно параллельных с ней осей. Момент инерции относительно любой оси () при условии ее параллельности с осью, проходящей через центр тяжести равен:
где — момент инерции сечения относительно оси проходящей через центр тяжести сечения; — площадь сечения; — расстояние между осями.
Примеры решения задач
ПРИМЕР 1
| Задание | Чему равен осевой момент инерции равнобедренного треугольного сечения относительно оси Z, проходящей через центр тяжести () треугольника, параллельно его основанию? Высота треугольника равна .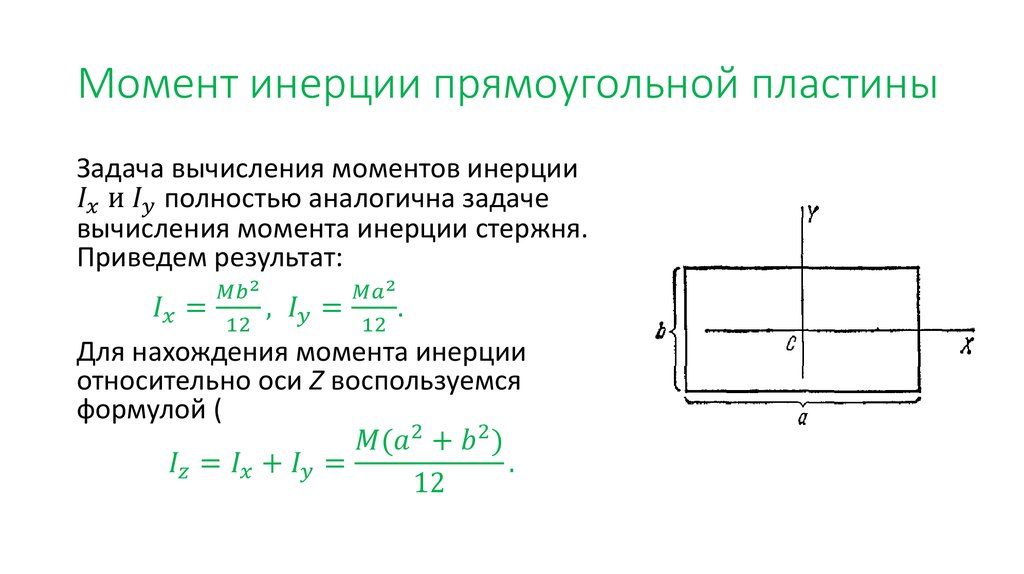 |
| Решение | Выделим на треугольном сечении прямоугольную элементарную площадку (см. рис.1). Она находится на расстоянии от оси вращения, длина одной ее стороны , другая сторона . Из рис.1 следует, что: Площадь выделенного прямоугольника с учетом (1.1) равна: Для нахождения осевого момента инерции используем его определение в виде: |
| Ответ |
ПРИМЕР 2
| Задание | Найдите осевые моменты инерции относительно перпендикулярных осей X и Y (рис.2) сечения в виде круга диаметр которого равен d. |
| Решение | Для решения задачи удобнее начать с нахождения полярного момента относительно центра сечения (). Все сечение разобьем на бесконечно тонкие кольца толщиной , радиус которых обозначим . Тогда элементарную площадь найдем как: |
I = ∑r i 2 dF i =∫r 2 dF (1.1)
В принципе и определение и формула, его описывающая, не сложные и запомнить их намного легче, чем вникнуть в суть. Но все-таки попробуем разобраться, что же такое момент инерции и откуда он взялся.
Но все-таки попробуем разобраться, что же такое момент инерции и откуда он взялся.
Понятие момент инерции пришло в сопромат и строительную механику из другого раздела физики, изучающего кинематику движения, в частности вращательное движение. Но все равно начнем издалека.
Я точно не знаю, упало ли Исааку Ньютону на голову яблоко, упало оно рядом, или вообще не падало, теория вероятности допускает все эти варианты (к тому же в этом яблоке слишком много от библейской легенды о древе познания), однако я уверен, что Ньютон был наблюдательным человеком, способным делать выводы из своих наблюдений. Так наблюдательность и воображение позволили Ньютону сформулировать основной закон динамики (второй закон Ньютона), согласно которому масса тела m , умноженная на ускорение a , равна действующей силе Q (вообще-то более привычным для силы является обозначение F, но так как дальше мы будем иметь дело с площадью, которая также часто обозначается как F, то я использую для внешней силы, рассматриваемой в теоретической механике как сосредоточенная нагрузка, обозначение Q, сути дела это не меняет):
Q = ma (1.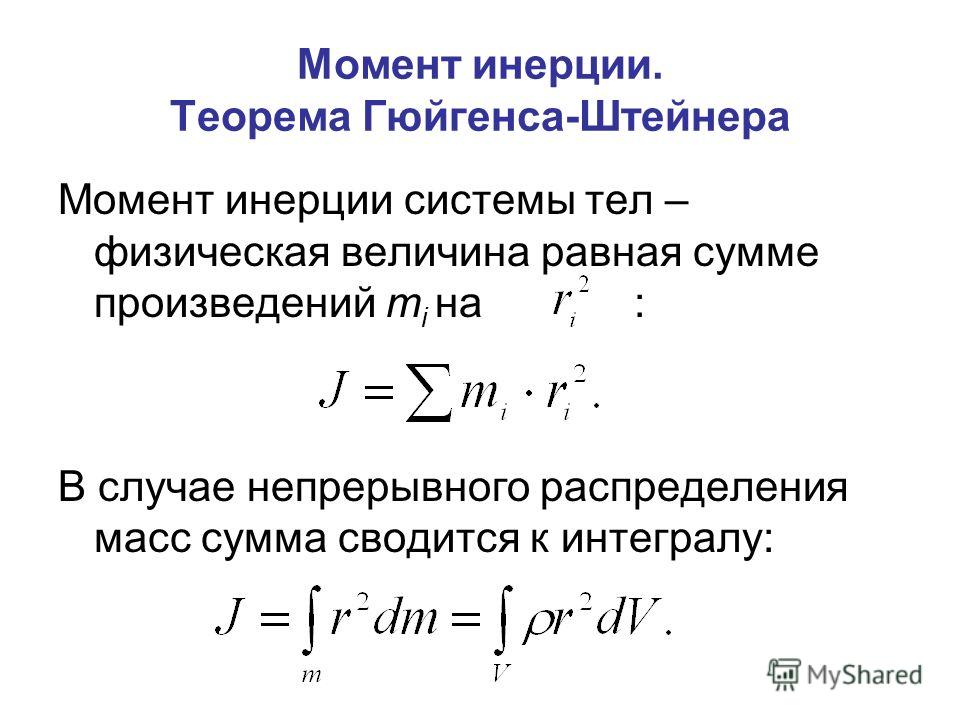 2)
2)
По мне величие Ньютона именно в простоте и понятности данного определения. А еще, если учесть, что при равноускоренном движении ускорение а равно отношению приращения скорости ΔV к периоду времени Δt , за который скорость изменилась:
a = Δv/Δt = (v — v о)/t (1.3.1)
при V о = 0 a = v/t (1.3.2)
то можно определить основные параметры движения, такие как расстояние, скорость, время и даже импульс р , характеризующий количество движения:
p = mv (1.4)
Например, яблоко, падающее с разной высоты под действием только силы тяжести, будет падать до земли разное время, иметь разную скорость в момент приземления и соответственно разный импульс. Другими словами, яблоко, падающее с бóльшей высоты, будет дольше лететь и сильнее треснет по лбу незадачливого наблюдателя. И все это Ньютон свел к простой и понятной формуле.
А еще Ньютон сформулировал закон инерции (первый закон Ньютона): если ускорение а = 0 , то в инерциальной системе отсчета невозможно определить, находится ли наблюдаемое тело, на которое не действуют внешние силы, в состоянии покоя или движется прямолинейно с постоянной скоростью.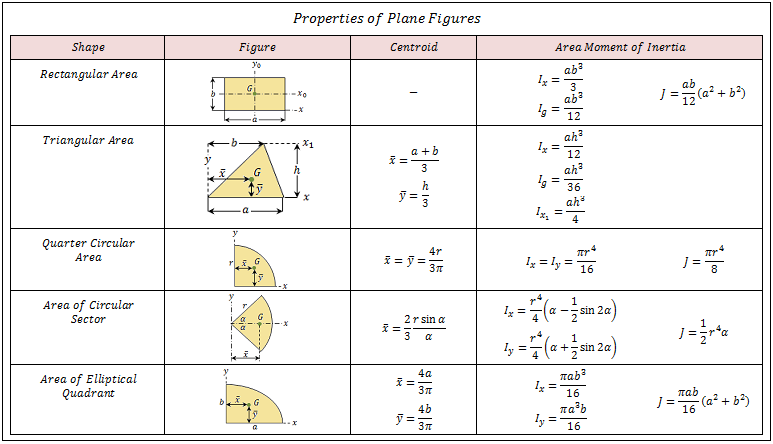 Это свойство материальных тел сохранять свою скорость, пусть даже и нулевую, называется инертностью. Мерой инертности является инерционная масса тела. Иногда инерционная масса называется инертной, но сути дела это не меняет. Считается, что инерционная масса равна гравитационной массе и потому часто не уточняется, какая именно масса имеется в виду, а упоминается просто масса тела.
Это свойство материальных тел сохранять свою скорость, пусть даже и нулевую, называется инертностью. Мерой инертности является инерционная масса тела. Иногда инерционная масса называется инертной, но сути дела это не меняет. Считается, что инерционная масса равна гравитационной массе и потому часто не уточняется, какая именно масса имеется в виду, а упоминается просто масса тела.
Не менее важным и значимым является и третий закон Ньютона, согласно которому сила действия равна силе противодействия, если силы направлены по одной прямой, но при этом в противоположные стороны . Не смотря, на кажущуюся простоту, и этот вывод Ньютона гениален и значение этого закона трудно переоценить. Об одном из применений этого закона чуть ниже.
Однако данные положения справедливы только для тел, движущихся поступательно, т.е. по прямолинейной траектории и при этом все материальные точки таких тел двигаются с одинаковой скоростью или одинаковым ускорением. При криволинейном движении и в частности при вращательном движении, например, когда тело вращается вокруг своей оси симметрии, материальные точки такого тела перемещаются в пространстве с одинаковой угловой скоростью w , но при этом линейная скорость v у различных точек будет разная и эта линейная скорость прямо пропорциональна расстоянию r от оси вращения до этой точки:
v = wr (1.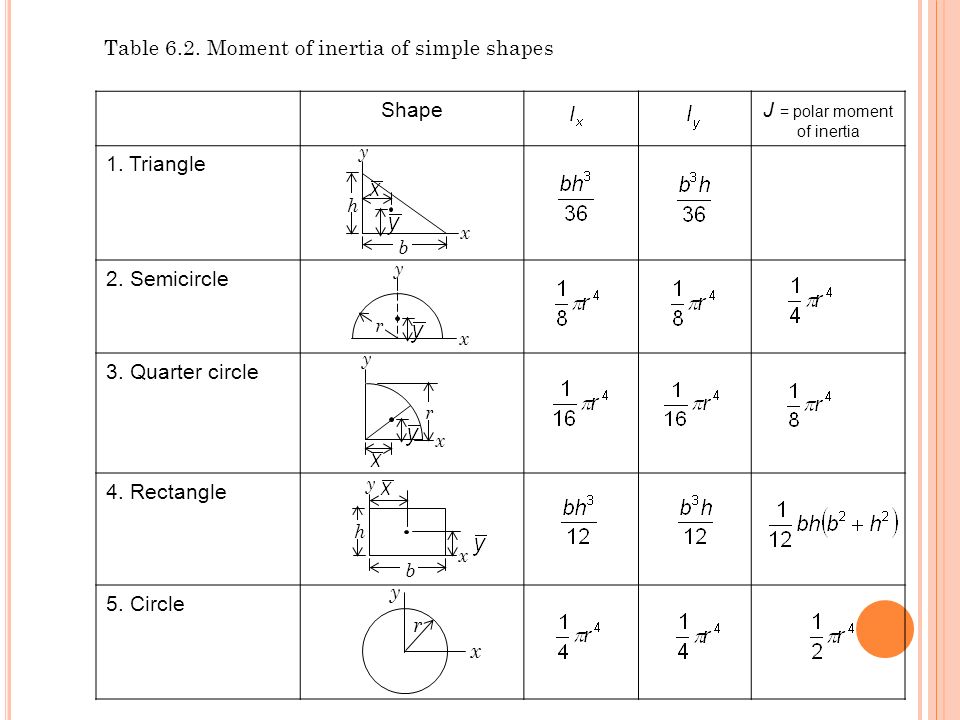 5)
5)
при этом угловая скорость равна отношению приращения угла поворота Δφ к периоду времени Δt , за который угол поворота изменился:
w = Δφ/Δt = (φ — φ о)/t (1.6.1)
при φ о = 0 w = φ/t (1.7.2)
соответственно нормальное ускорение а n при вращательном движении равно:
a n = v 2 /r = w 2 r (1.8)
И получается, что для вращательного движения мы не можем прямо использовать формулу (1.2), так как при вращательном движении одного только значения массы тела недостаточно, требуется еще знать распределение этой массы в теле. Получается, что чем ближе материальные точки тела к оси вращения, тем меньшую силу требуется приложить, чтобы заставить тело вращаться и наоборот, чем дальше материальные точки тела от оси вращения, тем большую силу нужно приложить, чтобы заставить тело вращаться (в данном случае речь идет о приложении силы в одной и той же точке). К тому же при вращении тела более удобно рассматривать не действующую силу, а вращающий момент, так как при вращательном движении точка приложения силы также имеет большое значение.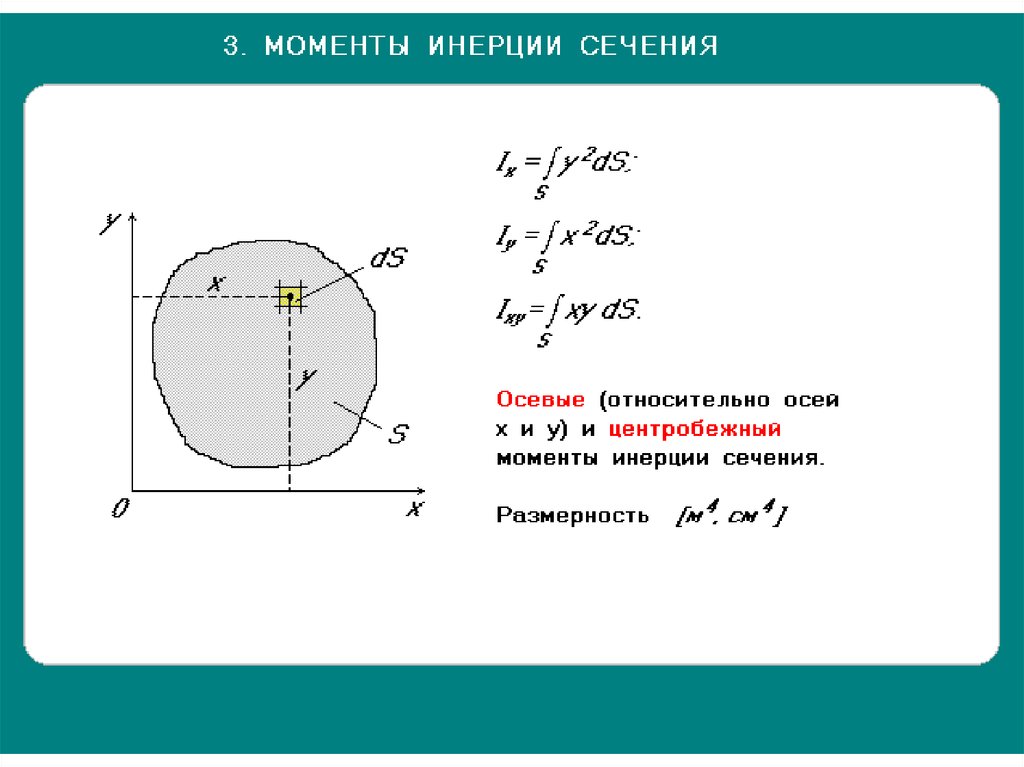
Поразительные свойства момента нам известны со времен Архимеда и если применить понятие момента к вращательному движению, то значение момента М будет тем больше, чем больше расстояние r от оси вращения до точки приложения силы F (в строительной механике внешняя сила часто обозначается как Р или Q ):
М = Qr (1.9)
Из этой также не очень сложной формулы выходит, что если сила будет приложена по оси вращения, то никакого вращения не будет, так как r = 0, а если сила будет приложена на максимальном удалении от оси вращения, то и значение момента будет максимальным. А если мы подставим в формулу (1.9) значение силы из формулы (1.2) и значение нормального ускорения и формулы (1.8), то получим следующее уравнение:
М = mw 2 r·r = mw 2 r 2 (1.10)
В частном случае когда тело является материальной точкой, имеющей размеры намного меньше, чем расстояние от этой точки до оси вращения, уравнение (1.10) применимо в чистом виде.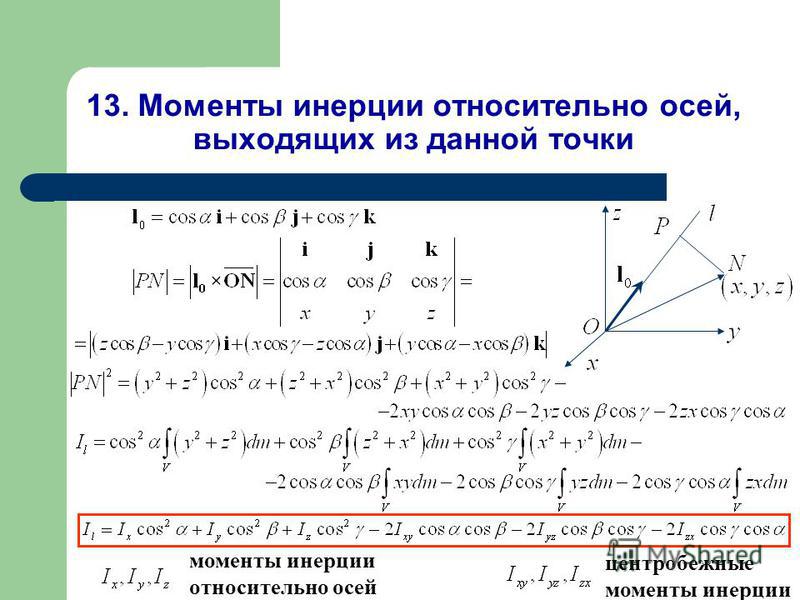 Однако для тела, вращающегося вокруг одной из своих осей симметрии, расстояние от каждой материальной точки составляющей данное тело, всегда меньше одного из геометрических размеров тела и потому распределение массы тела имеет большое значение, в этом случае требуется учесть эти расстояния отдельно для каждой точки:
Однако для тела, вращающегося вокруг одной из своих осей симметрии, расстояние от каждой материальной точки составляющей данное тело, всегда меньше одного из геометрических размеров тела и потому распределение массы тела имеет большое значение, в этом случае требуется учесть эти расстояния отдельно для каждой точки:
M = ∑r i 2 w 2 m i (1.11.1)
М с = w 2 ∫r 2 dm
И тогда получается, что согласно третьему закону Ньютона в ответ на действие вращающего момента будет возникать так называемый момент инерции I . При этом значения вращающего момента и момента инерции будут равны, а сами моменты направлены в противоположные стороны. При постоянной угловой скорости вращения, например w = 1, основными величинами, характеризующими вращающий момент или момент инерции будут масса материальных точек, составляющих тело, и расстояния от этих точек до оси вращения. В итоге формула момента инерции примет следующий вид:
[- М] = I = ∑r i 2 m i (1.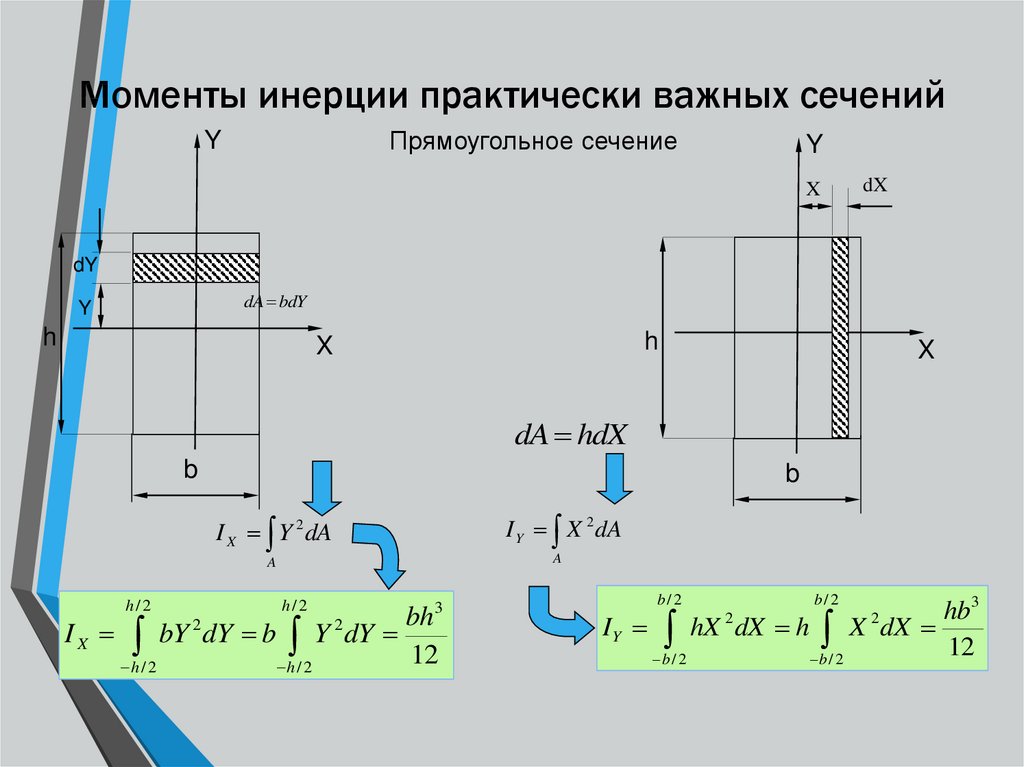 12.1)
12.1)
I c = ∫r 2 dm (1.11.2) — при вращении тела вокруг оси симметрии
где I — общепринятое обозначение момента инерции, I c — обозначение осевого момента инерции тела, кг/м 2 . Для однородного тела, имеющего одинаковую плотность ρ по всему объему тела V формулу осевого момента инерции тела можно записать так:
I c = ∫ρr 2 dV (1.13)
Таким образом момент инерции является мерой инертности тела при вращательном движении, подобно тому как масса является мерой инертности тела при поступательном прямолинейном движении .
Все круг замкнулся. И тут может возникнуть вопрос, какое отношение все эти законы динамики и кинематики имеют к расчету статических строительных конструкций? Оказывается, что ни на есть самое прямое и непосредственное. Во-первых потому, что все эти формулы выводились физиками и математиками в те далекие времена, когда таких дисциплин, как «Теоретическая механика» или «Теория сопротивления материалов» попросту не существовало. А во-вторых потому, что весь расчет строительных конструкций и построен на основе указанных законов и формулировок и пока ни кем не опровергнутом утвержении о равенстве гравитационной и инертой масс. Вот только в теории сопротивления материалов все еще проще, как ни парадоксально это звучит.
А во-вторых потому, что весь расчет строительных конструкций и построен на основе указанных законов и формулировок и пока ни кем не опровергнутом утвержении о равенстве гравитационной и инертой масс. Вот только в теории сопротивления материалов все еще проще, как ни парадоксально это звучит.
А проще потому, что при решении определенных задач может рассматриваться не все тело, а только его поперечное сечение, а при необходимости несколько поперечных сечений. Но в этих сечениях действуют такие же физические силы, правда имеющие несколько иную природу. Таким образом, если рассматривать некое тело, длина которого постоянна, а само тело является однородным, то если не учитывать постоянные параметры — длину и плотность (l = const, ρ = const ) — мы получим модель поперечного сечения. Для такого поперечного сечения с математической точки зрения будет справедливым уравнение:
I р = ∫r 2 dF (2.1) → (1.1)
где I p — полярный момент инерции поперечного сечения, м 4 .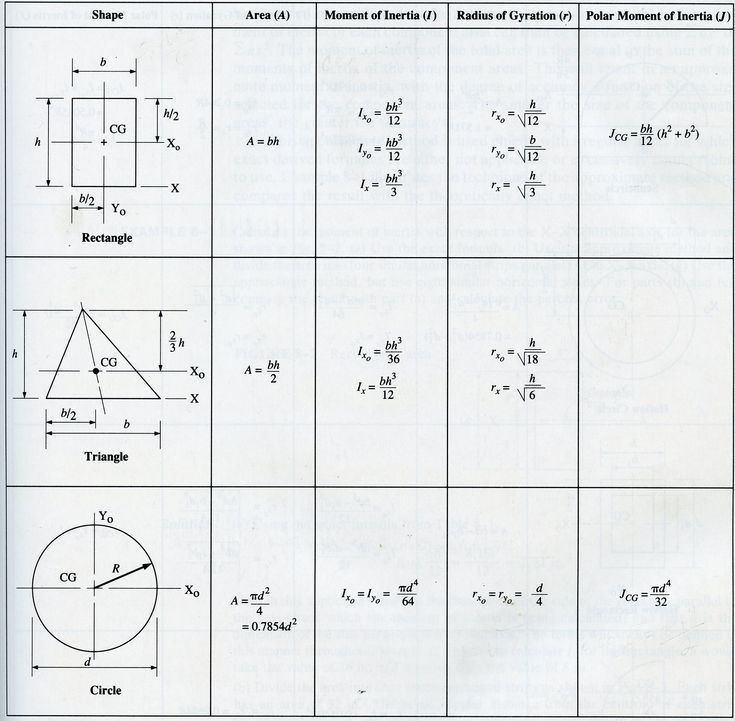 В итоге мы получили формулу, с которой начинали (а вот стало ли понятнее, что такое момент инерции сечения, не знаю).
В итоге мы получили формулу, с которой начинали (а вот стало ли понятнее, что такое момент инерции сечения, не знаю).
Так как в теории сопротивления материалов часто рассматриваются прямоугольные сечения, да и прямоугольная система координат более удобна, то при решении задач обычно рассматриваются два осевых момента инерции поперечного сечения:
I z = ∫y 2 dF (2.2.1)
I y = ∫z 2 dF (2.2.2)
Рисунок 1 . Значения координат при определении осевых моментов инерции.
Тут может возникнуть вопрос, почему использованы оси z и у , а не более привычные х и у ? Так уж сложилось, что определение усилий в поперечном сечении и подбор сечения, выдерживающего действующие напряжения, равные приложенным усилиям — две разные задачи. Первую задачу — определение усилий — решает строительная механика, вторую задачу — подбор сечения — теория сопротивления материалов. При этом в строительной механике рассматривается при решении простых задач достаточно часто стержень (для прямолинейных конструкций), имеющий определенную длину l , а высота и ширина сечения не учитываются, при этом считается, что ось х как раз и проходит через центры тяжести всех поперечных сечений и таким образом при построении эпюр (порой достаточно сложных) длина l как раз и откладывается по оси х , а по оси у откладываются значения эпюр. В то же время теория сопротивления материалов рассматривает именно поперечное сечение, для которого важны ширина и высота, а длина не учитывается. Само собой при решении задач теории сопротивления материалов, также порой достаточно сложных используются все те же привычные оси х и у . Мне такое положение дел кажется не совсем правильным, так как не смотря на разницу, это все же смежные задачи и потому будет более целесообразным использование единых осей для рассчитываемой конструкции.
В то же время теория сопротивления материалов рассматривает именно поперечное сечение, для которого важны ширина и высота, а длина не учитывается. Само собой при решении задач теории сопротивления материалов, также порой достаточно сложных используются все те же привычные оси х и у . Мне такое положение дел кажется не совсем правильным, так как не смотря на разницу, это все же смежные задачи и потому будет более целесообразным использование единых осей для рассчитываемой конструкции.
Значение полярного момента инерции в прямоугольной системе координат будет:
I р = ∫r 2 dF = ∫y 2 dF + ∫z 2 dF (2.3)
Так как в прямоугольной системе координат радиус — это гипотенуза прямоугольного треугольника, а как известно квадрат гипотенузы равен сумме квадратов катетов. А еще существует понятие центробежного момента инерции поперечного сечения:
I xz = ∫xzdF (2.4)
Среди осей прямоугольной системы координат, проходящих через центр тяжести поперечного сечения, есть две взаимно-перпендикулярные оси, относительно которых осевые моменты инерции принимают максимальное и минимальное значение, при этом центробежный момент инерции сечения I zy = 0 .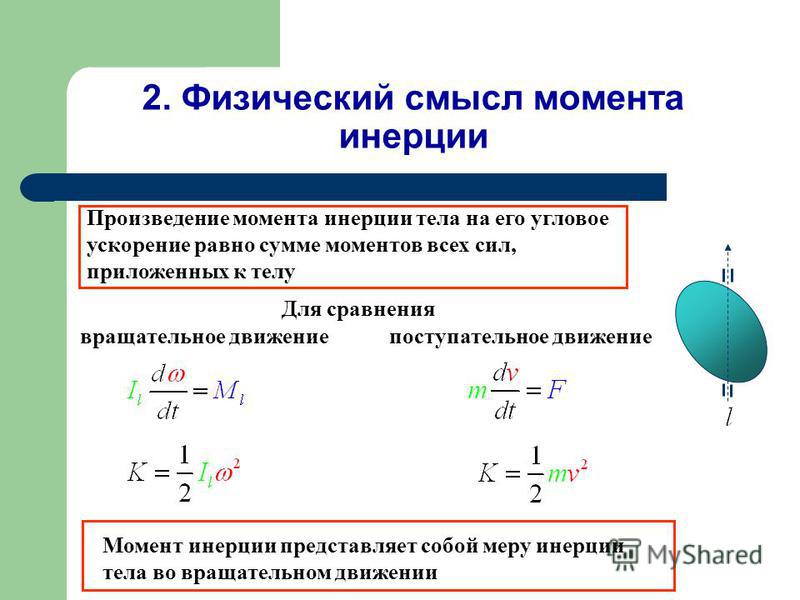 Такие оси называют главными центральными осями поперечного сечения, а моменты инерции относительно таких осей — главными центральными моментами инерции
Такие оси называют главными центральными осями поперечного сечения, а моменты инерции относительно таких осей — главными центральными моментами инерции
Когда в теории сопротивления материалов речь заходит о моментах инерции, то как правило в виду имеются именно главные центральные моменты инерции поперечного сечения. Для квадратных, прямоугольных, круглых сечений главные оси будут совпадать с осями симметрии. Моменты инерции поперечного сечения также называют геометрическими моментами инерции или моментами инерции площади, но суть от этого не изменяется.
В принципе самому определять значения главных центральных моментов инерции для поперечных сечений наиболее распространенных геометрических форм — квадрата, прямоугольника, круга, трубы, треугольника и некоторых других — большой необходимости нет. Такие моменты инерции давно определены и широко известны. А при расчете осевых моментов инерции для сечений сложной геометрической формы справедлива теорема Гюйгенса-Штейнера:
I = I c + r 2 F (2. 5)
5)
таким образом, если известны площади и центры тяжести простых геометрических фигур, составляющих сложное сечение, то определить значение осевого момента инерции всего сечения не составит труда. А для того, чтобы определить центр тяжести сложного сечения, используются статические моменты поперечного сечения. Более подробно статические моменты рассматриваются в другой статье, здесь лишь добавлю. Физический смысл статического момента следующий: статический момент тела — это сумма моментов для материальных точек, составляющих тело, относительно некоторой точки (полярный статический момент) или относительно оси (осевой статический момент), а так как момент — это произведение силы на плечо (1.9), то и определяется статический момент тела соответственно:
S = ∑M = ∑r i m i = ∫rdm (2.6)
и тогда полярный статический момент поперечного сечения будет:
S р = ∫rdF (2.7)
Как видим, определение статического момента сходно с определением момента инерции.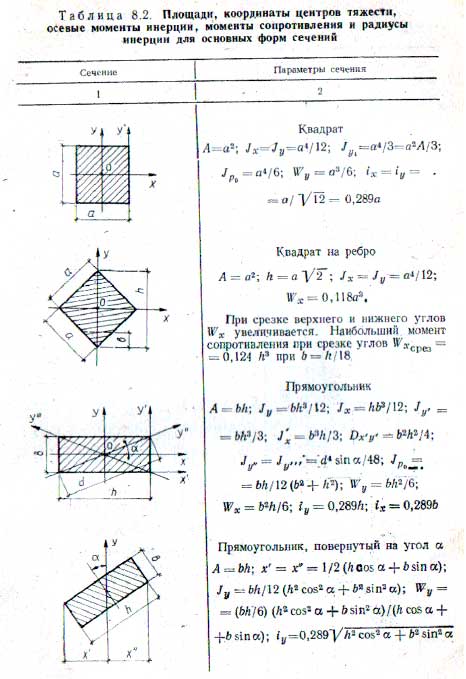 Но есть и принципиальная разница. Статический момент потому и называется статическим, что для тела, на которое действует сила тяжести, статический момент равен нулю относительно центра тяжести. Другими словами такое тело находится в состоянии равновесия, если опора приложена к центру тяжести тела. А согласно первому закону Ньютона такое тело или находится в состоянии покоя или движется с постоянной скоростью, т.е. ускорение = 0. А еще с чисто математической точки зрения статический момент может быть равен нулю по той простой причине, что при определении статического момента необходимо учитывать направление действия момента. Например относительно осей координат, проходящих через центр тяжести прямоугольника, площади верхней части и нижней части прямоугольника будут положительными так как символизируют силу тяжести, действующую в одном направлении. При этом расстояние от оси до центра тяжести можно рассматривать как положительное (условно: момент от силы тяжести верхней части прямоугольника пытается вращать сечение по часовой стрелке), а до центра тяжести нижней части — как отрицательное (условно: момент от силы тяжести нижней части прямоугольника пытается вращать сечение против часовой стрелки).
Но есть и принципиальная разница. Статический момент потому и называется статическим, что для тела, на которое действует сила тяжести, статический момент равен нулю относительно центра тяжести. Другими словами такое тело находится в состоянии равновесия, если опора приложена к центру тяжести тела. А согласно первому закону Ньютона такое тело или находится в состоянии покоя или движется с постоянной скоростью, т.е. ускорение = 0. А еще с чисто математической точки зрения статический момент может быть равен нулю по той простой причине, что при определении статического момента необходимо учитывать направление действия момента. Например относительно осей координат, проходящих через центр тяжести прямоугольника, площади верхней части и нижней части прямоугольника будут положительными так как символизируют силу тяжести, действующую в одном направлении. При этом расстояние от оси до центра тяжести можно рассматривать как положительное (условно: момент от силы тяжести верхней части прямоугольника пытается вращать сечение по часовой стрелке), а до центра тяжести нижней части — как отрицательное (условно: момент от силы тяжести нижней части прямоугольника пытается вращать сечение против часовой стрелки).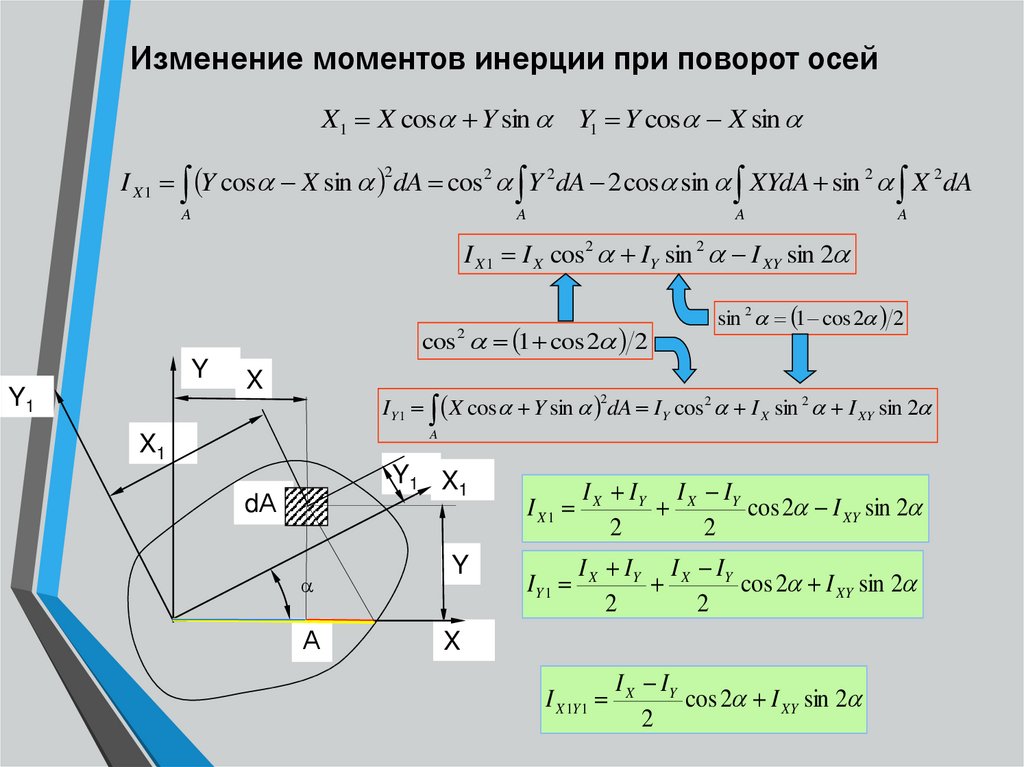 А так как такие площади численно равны и равны расстояния от центров тяжести верхней части прямоугольника и нижней части прямоугольника, то сумма действующих моментов и составит искомый 0.
А так как такие площади численно равны и равны расстояния от центров тяжести верхней части прямоугольника и нижней части прямоугольника, то сумма действующих моментов и составит искомый 0.
S z = ∫ydF = 0 (2.8)
А еще этот великий ноль позволяет определять опорные реакции строительных конструкций. Если рассматривать строительную конструкцию, к которой приложена например сосредоточенная нагрузка Q в некоторой точке, то такую строительную конструкцию можно рассматривать, как тело с центром тяжести в точке приложения силы, а опорные реакции в этом случае рассматриваются, как силы приложенные в точках опор. Таким образом зная значение сосредоточенной нагрузки Q и расстояния от точки приложения нагрузки до опор строительной конструкции, можно определить опорные реакции. Например для шарнирно опертой балки на двух опорах значение опорных реакций будет пропорционально расстоянию до точки приложения силы, а сумма реакций опор будет равна приложенной нагрузке. Но как правило при определении опорных реакций поступают еще проще: за центр тяжести принимается одна из опор и тогда сумма моментов от приложенной нагрузки и от остальных опорных реакций все равно равна нулю.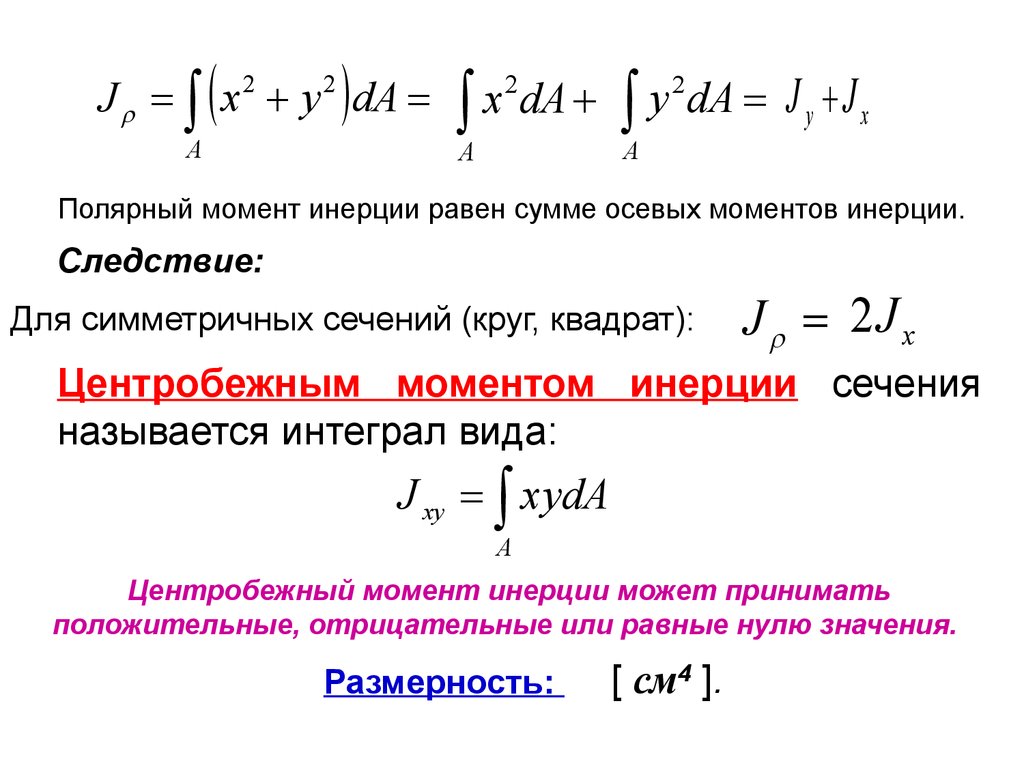 В этом случае момент от опорной реакции относительно которой составляется уравнение моментов, равен нулю, так как плечо действия силы = 0, а значит в сумме моментов остаются только две силы: приложенная нагрузка и неизвестная опорная реакция (для статически определимых конструкций).
В этом случае момент от опорной реакции относительно которой составляется уравнение моментов, равен нулю, так как плечо действия силы = 0, а значит в сумме моментов остаются только две силы: приложенная нагрузка и неизвестная опорная реакция (для статически определимых конструкций).
Таким образом принципиальная разница между статическим моментом и моментом инерции в том, что статический момент характеризует сечение, которое сила тяжести как бы пытается сломать пополам относительно центра тяжести или оси симметрии, а момент инерции характеризует тело, все материальные точки которого перемещаются (или пытаются переместиться в одном направлении). Возможно, более наглядно представить себе эту разницу помогут следующие достаточно условные расчетные схемы для прямоугольного сечения:
Рисунок 2 . Наглядная разница между статическим моментом и моментом инерции.
А теперь вернемся еще раз к кинематике движения. Если проводить аналогии между напряжениями, возникающими в поперечных сечениях строительных конструкций, и различными видами движения, то в центрально растягиваемых и центрально сжатых элементах возникают напряжения равномерные по всей площади сечения. Эти напряжения можно сравнить с действием некоторой силы на тело, при котором тело будет двигаться прямолинейно и поступательно. А самое интересное, это то, что поперечные сечения центрально-растянутых или центрально сжатых элементов действительно движутся, так как действующие напряжения вызывают деформации. И величину таких деформаций можно определить для любого поперечного сечения конструкции. Для этого достаточно знать значение действующих напряжений, длину элемента, площадь сечения и модуль упругости материала, из которого изготовлена конструкция.
Эти напряжения можно сравнить с действием некоторой силы на тело, при котором тело будет двигаться прямолинейно и поступательно. А самое интересное, это то, что поперечные сечения центрально-растянутых или центрально сжатых элементов действительно движутся, так как действующие напряжения вызывают деформации. И величину таких деформаций можно определить для любого поперечного сечения конструкции. Для этого достаточно знать значение действующих напряжений, длину элемента, площадь сечения и модуль упругости материала, из которого изготовлена конструкция.
У изгибаемых элементов поперечные сечения также не остаются на месте, а перемещаются, при этом перемещение поперечных сечений изгибаемых элементов подобно вращению некоего тела относительно некоторой оси. Как вы уже наверное догадались, момент инерции позволяет определить и угол наклона поперечного сечения и перемещение Δl для крайних точек сечения. Эти крайние точки для прямоугольного сечения находятся на расстоянии, равном половине высоты сечения (почему — достаточно подробно описано в статье «Основы сопромата. Определенение прогиба «). А это в свою очередь позволяет определить прогиб конструкции.
Определенение прогиба «). А это в свою очередь позволяет определить прогиб конструкции.
А еще момент инерции позволяет определить момент сопротивления сечения . Для этого момент инерции нужно просто разделить на расстояние от центра тяжести сечения до наиболее удаленной точки сечения, для прямоугольного сечения на h/2. А так как исследуемые сечения не всегда симметричны, то значение момента сопротивления может быть разным для разных частей сечения.
А началось все с банального яблока… хотя нет, начиналось все со слова.
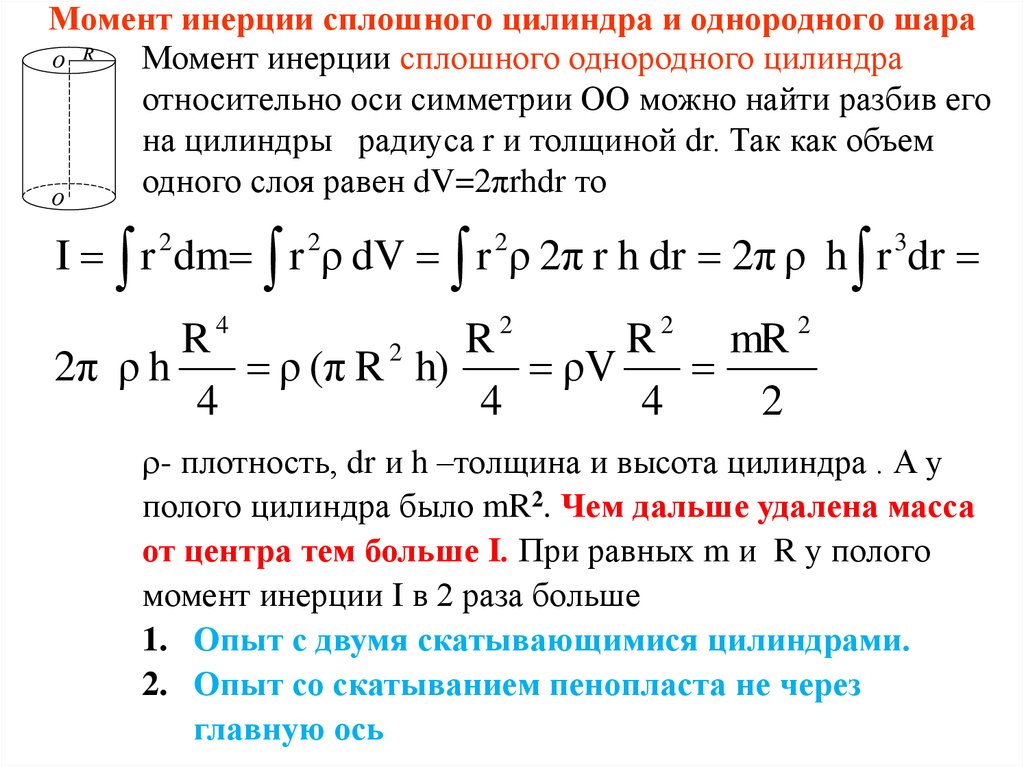
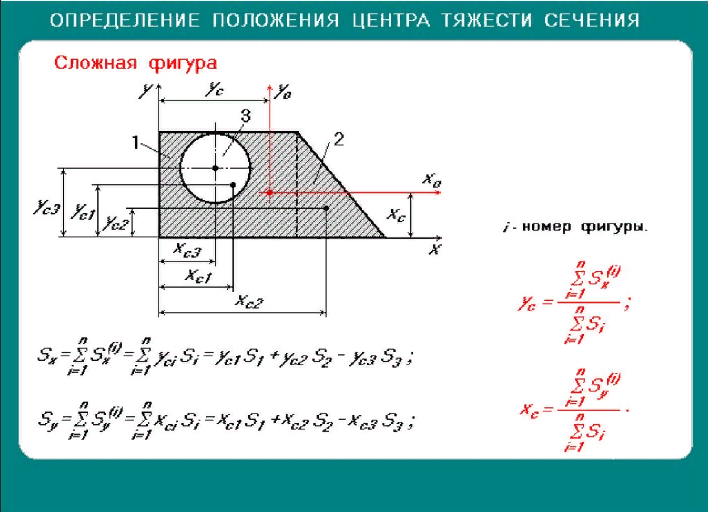
Как уже отмечалось выше, к числу простых плоских фигур относятся три фигуры: прямоугольник, треугольник и круг. Простыми эти фигуры считаются потому, что положение центра тяжести этих фигур заранее известно. Все остальные фигуры могут быть составлены из этих простых фигур и считаются сложными. Вычислим осевые моменты инерции простых фигур относительно их центральных осей.
1. Прямоугольник. Рассмотрим сечение
прямоугольного профиля размерами(Рис. 4.6). Выделим элемент сечения двумя
бесконечно близко расположенными
сечениями на расстоянииот
центральной оси
4.6). Выделим элемент сечения двумя
бесконечно близко расположенными
сечениями на расстоянииот
центральной оси
.
Вычислим момент инерции прямоугольного сечения относительно оси:
. (4.10)
Момент
инерции прямоугольного сечения
относительно оси
найдем аналогично. Здесь вывод не
приводится.
. (4.11)
и
равен нулю, так как оси
и
являются осями симметрии, а, следовательно,
главными осями.
2. Равнобедренный треугольник. Рассмотрим сечение треугольного профиля
размерами
(Рис.4.7). Выделим элемент сечения двумя
бесконечно близко расположенными
сечениями на расстоянииот центральной оси
.
Центр тяжести треугольника находится
на расстояни
от основания. Треугольник принимается
равнобедренным, так что ось
сечения является осью симметрии.
Вычислим
момент инерции сечения относительно
оси
:
. (4.12)
Величину определим из подобия треугольников:
;
откуда
.
Подставляя
выражения для
в (4. 12) и интегрируя, получим:
12) и интегрируя, получим:
. (4.13)
Момент
инерции для равнобедренного треугольника
относительно оси
находится аналогичным образом и равен:
(4.14)
Центробежный
момент инерции относительно осей
и
равен нулю, так как ось
является осью симметрии сечения.
3. Круг . Рассмотрим сечение круглого профиля диаметром(Рис.4.8). Выделим элемент сечения двумя бесконечно близко расположенными концентрическими окружностями, расположенными на расстоянииот центра тяжести круга.
Вычислим полярный момент инерции круга, воспользовавшись выражением (4.5):
. (4.15)
Используя условие инвариантности для
суммы осевых моментов инерции относительно
двух взаимно перпендикулярных осей
(4.6) и учитывая, что для круга в силу
симметрии
,
определяем величину осевых моментов
инерции:
. (4.16)
. (4.17)
Центробежный
момент инерции относительно осей
иравен нулю, так как оси
и
являются осями симметрии сечения.
4.
 4. Зависимости между моментами инерции относительно параллельных осей
4. Зависимости между моментами инерции относительно параллельных осейПри вычислении моментов инерции для сложных фигур следует запомнить одно правило: значения для моментов инерции можно складывать, если они вычислены относительно одной и той же оси . Для сложных фигур чаще всего центры тяжести отдельных простых фигур и всей фигуры не совпадают. Не совпадают, соответственно, и центральные оси для отдельных простых фигур и всей фигуры. В связи с этим существуют приемы приведения моментов инерции к одной оси, например, центральной оси всей фигуры. Это может быть связано с параллельным переносом осей инерции и дополнительными вычислениями.
Рассмотрим определение моментов инерции относительно параллельных осей инерции, изображенных на рис.4.9.
Пусть
осевые и центробежный моменты инерции
изображенной на рис.4.9. фигуры относительно
произвольно выбранных осей
и
с началом координат в точкеизвестны. Требуется вычислить осевые
и центробежный моменты инерции фигуры
относительно произвольных параллельных
осей
и
с началом координат в точке.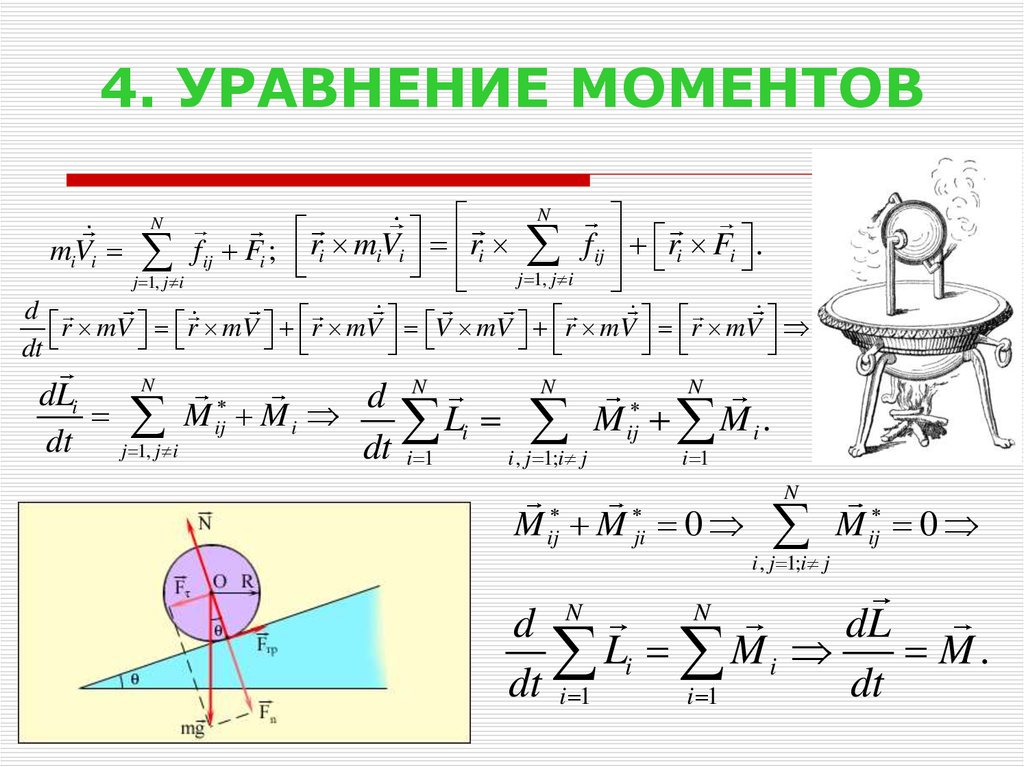 Оси
Оси
и
проведены на расстоянияхисоответственно от осей
и
.
Воспользуемся
выражениями для осевых моментов инерции
(4.4) и для центробежного момента инерции
(4.7). Подставим в эти выражения вместо
текущих координат
и
элемента с бесконечно малой площадью
координаты
и
в новой системе координат. Получим:
Анализируя полученные выражения, приходим к выводу, что при вычислении моментов инерции относительно параллельных осей к моментам инерции, вычисленных относительно исходных осей инерции, следует призводить добавки в виде дополнительных членов, которые могут оказаться намного больше значений для моментов инерции относительно исходных осей. Поэтому пренебрегать этими дополнительными членами ни в коем случае нельзя.
Рассмотренный случай представляет собой самый общий случай параллельного переноса осей, когда в качестве исходных были взяты произвольные оси инерции. В большинстве расчетов встречаются частные случаи определения моментов инерции.
Первый частный случай .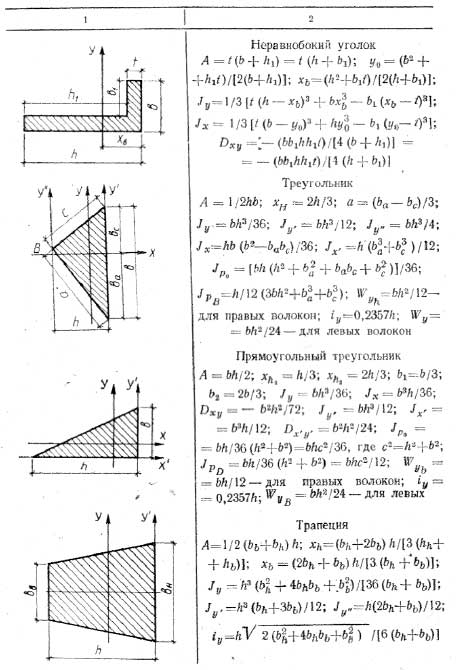 Исходные оси
являются центральными осями инерции
фигуры. Тогда, используя основное
свойство для статического момента
площади, можно исключить из уравнений
(4.18)(4.20) члены
уравнений, в которые входит статический
момент площади фигуры. В результате
получим:
Исходные оси
являются центральными осями инерции
фигуры. Тогда, используя основное
свойство для статического момента
площади, можно исключить из уравнений
(4.18)(4.20) члены
уравнений, в которые входит статический
момент площади фигуры. В результате
получим:
. (4.21)
. (4.22)
. (4.23)
Здесь оси
и
центральные оси
инерции.
Второй частный случай . Исходные оси являются главными осями инерции. Тогда, учитывая, что относительно главных осей инерции центробежный момент инерции равен нулю, получим:
. (4.24)
. (4.25)
. (4.26)
Здесь оси
и
главные оси инерции.
Воспользуемся полученными выражениями и рассмотрим несколько примеров вычисления моментов инерции для плоских фигур.
Пример 4.2. Определить осевые моменты инерции фигуры, приведенной на рис. 4.10, относительно центральных осейи.
В предыдущем примере 4.1 для изображенной
на рис.4.10 фигуры было определено положение
центра тяжести С.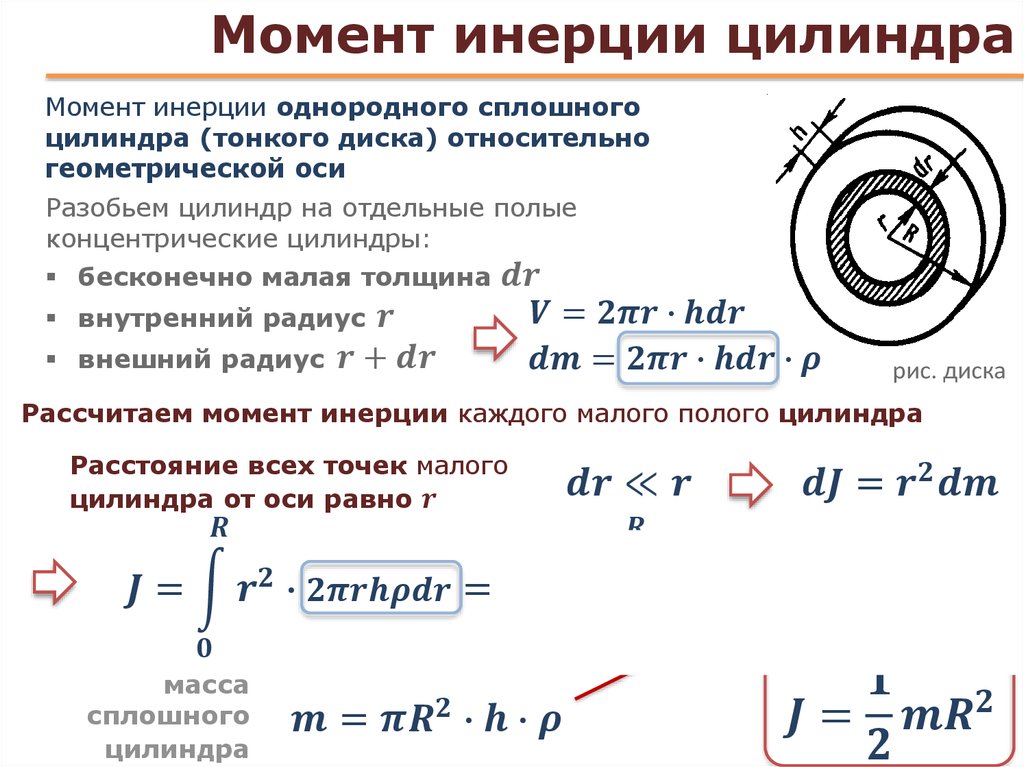 Координата центра
тяжести откладывалась от оси
и составила
Координата центра
тяжести откладывалась от оси
и составила
.
Вычислим расстоянияимежду осямиии осямии.
Эти расстояния составили соответственно
и
.
Так как исходные осииявляются центральными осями для простых
фигур в виде прямоугольников, для
определения момента инерции фигуры
относительно осивоспользуемся выводами для первого
частного случая, в частности, формулой
(4.21).
Момент инерции относительно оси получим путем сложения моментов инерции простых фигур относительно этой же оси, так как осьявляется общей центральной осью для простых фигур и для всей фигуры.
см 4 .
Центробежный момент инерции относительно осей иравен нулю, так как ось инерцииявляется главной осью (осью симметрии фигуры).
Пример 4.3. Чему равен размер b (в см) фигуры, изображенной на рис. 4.11, если момент инерции фигуры относительно оси равен 1000 см 4 ?
Выразим момент инерции относительно
оси
через неизвестный размер сечения,
воспользовавшись формулой (4. 21), учитывая,
что расстояние между осямииравно 7см:
21), учитывая,
что расстояние между осямииравно 7см:
см 4 . (а)
Решая выражение (а) относительно размера сечения , получим:
см.
Пример.4.4. Какая из фигур, изображенных на рис.4.12
, имеет больший момент инерции относительно
оси
,
если обе фигуры имеют одинаковую площадь
см 2 ?
1. Выразим площади фигур через их размеры и определим:
а) диаметр сечения для круглого сечения:
см 2 ; Откуда
см.
б) размер стороны квадрата:
;
Откуда
см.
2. Вычисляем момент инерции для круглого сечения:
см 4 .
3. Вычисляем момент инерции для сечения квадратной формы:
см 4 .
Сравнивая полученные результаты, приходим к выводу, что наибольшим моментом инерции будет обладать сечение квадратной формы по сравнению с сечение круглой формы при одинаковой у них площади.
Пример 4.5. Определить полярный момент
инерции (в см 4) сечения прямоугольной
формы относительно его центра тяжести,
если ширина сечения
см,
высота сечения
см.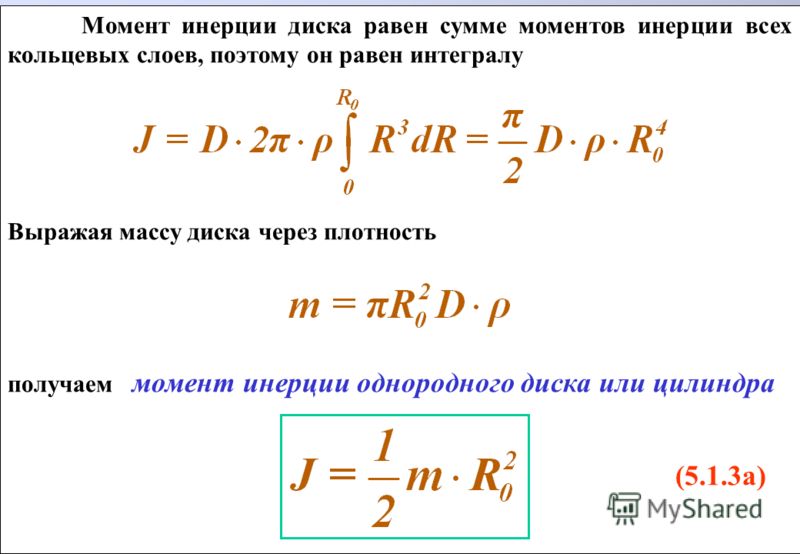
1. Найдем моменты инерции сечения относительно горизонтальной и вертикальнойцентральных осей инерции:
см 4 ;
см 4 .
2. Определяем полярный момент инерции сечения как сумму осевых моментов инерции:
см 4 .
Пример 4.6. Определить момент инерции фигуры треугольной формы изображенной на рис.4.13, относительно центральной оси , если момент инерции фигуры относительно осиравен 2400 см 4 .
Момент инерции сечения треугольной
формы относительно главной оси инерции
будет меньше по сравнению с моментом
инерции относительно осина величину
.
Поэтому при
см
момент инерции сечения относительно
осинайдем следующим образом.
Урок 8 | sopromat
Теорема о моментах инерции относительно осей, параллельных центральным
Осевой момент инерции сечения относительно произвольной оси равен моменту инерции относительно центральной оси параллельной данной плюс произведение квадрата расстояния между осями на площадь сечения.
Центробежный момент инерции сечения относительно произвольных осей координат равен центробежному моменту инерции относительно центральных осей параллельных данным плюс произведение площади сечения на расстояния между осями.
Рассмотрим сечение произвольной формы площадью A. Пусть оси x и y являются центральными
(т.е. проходящими через центр тяжести сечения), и известны моменты инерции Jx, Jy, Jxy. Требуется определить моменты инерции Jx1, Jy1, Jx1y1 относительно осей x1 и y1, смещенных параллельно центральным осям на расстояния a и b соответственно.
Рис. 3.3 – К теореме о трех моментах
Координаты элементарной площадки dA в системе координат (x1, y1):
(3.18)
По определению осевого момента инерции (3. 11)
11)
(3.19)
где так как оси x и у являются центральными, т.е. проходящими через центр
тяжести площади сечения.
Таким образом,
(3.20)
Рассуждая аналогичным образом, можно получить
(3.21)
По определению центробежного момента инерции (3.13):
(3. 22)
22)
Вычисление моментов инерций простейших фигур
Прямоугольник
Сначала определим моменты инерции прямоугольника относительно осей x1 и y1.
Выделим на расстоянии y1 от оси x1 элементарную площадку dA высотой dy1 и шириной, равной ширине прямоугольника:
Рис. 3.4 – Момент инерции прямоугольника.
По определению осевого момента инерции (3.11)
Заменим интеграл по площади интегралом по высоте
Аналогично
Моменты инерции относительно центральных осей x и y определим, пользуясь теоремой о
моментах инерции относительно осей, параллельных центральным (3.20) :
Аналогично
Круг
Определим полярный момент инерции круга. Выделим на расстоянии ρ от центра круга элементарный слой dA толщиной dρ .
Выделим на расстоянии ρ от центра круга элементарный слой dA толщиной dρ .
Рис. 3.5 – Момент инерции круга
По определению полярного момента инерции (3.14)
Заменим интеграл по площади интегралом по радиусу
Так как Jp=Jx+Jy и для круга Jx=Jy, то осевой момент инерции
Прямоугольный треугольник
Определим момент инерции треугольника относительно оси x1, совпадающей с его нижней стороной.
Рис. 3.6 – Момент инерции треугольника
Выделим на расстоянии y1 от оси x1 элементарную площадку dA высотой dy. Ширина площадки
Ширина площадки
из подобия треугольников:
Момент инерции
Относительно центральной оси
Аналогично для второй оси
Теорема о моментах инерции при повороте осей координат
Рассмотрим сечение произвольной формы площадью A. Пусть известны моменты инерции относительно
осей x и y: Jx, Jy, Jxy. Требуется определить моменты инерции J x1, J y1, J x1y1 относительно осей x1 и y1, повернутых по отношению к осям x и y на угол α.
Выделим в окрестности точки K с координатами x и y элементарную площадку dA.
Рис. 3.7 – Поворот координатных осей
Координаты площадки dA в повернутой системе координат:
Осевые моменты инерции:
Сложив попарно левые и правые части полученных уравнений, найдем:
Таким образом, сумма моментов инерции относительно осей прямоугольной системы координат не изменяется при их повороте.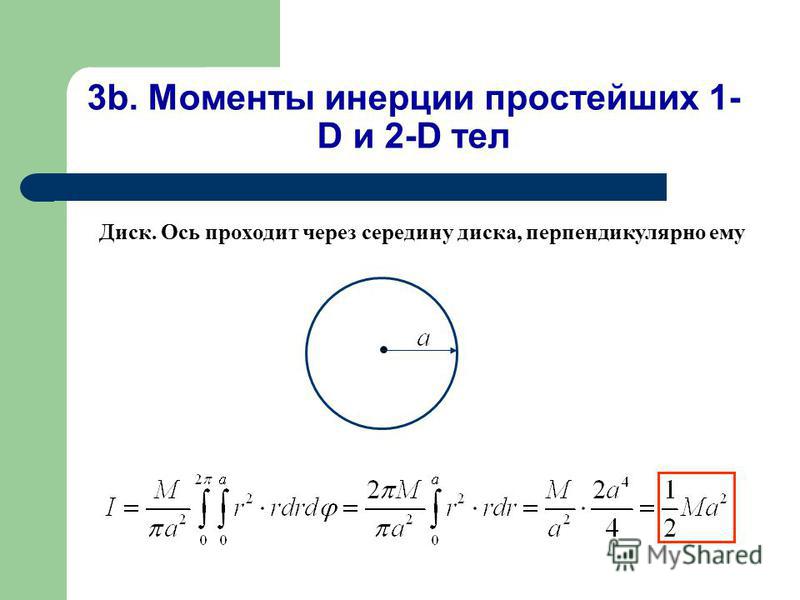 Как было показано выше, эта сумма равна полярному моменту инерции относительно начала координат.
Как было показано выше, эта сумма равна полярному моменту инерции относительно начала координат.
Центробежный момент инерции
Центры тяжести и моменты инерции основных простых фигур
Формулы площадей, центров тяжести, осевых и полярных моментов инерции, моментов сопротивления и других геометрических характеристик основных простых фигур: прямоугольника, квадрата, равнобедренного и прямоугольного треугольника, круга, полукруга, четверти круга, кольцевого и тонкостенного сечений.
Обозначения в формулах:
C — положение центра тяжести фигуры;
A — площадь сечения;
Ix , Iy — осевые моменты инерции сечения относительно главных осей;
Ix1 , Iy1 — осевые моменты инерции относительно вспомогательных (смещённых) осей;
Iρ — полярный момент инерции сечения;
Wx , Wy — осевые моменты сопротивления;
Wρ — полярный момент сопротивления
Прямоугольник
Прямоугольник высотой h и шириной b.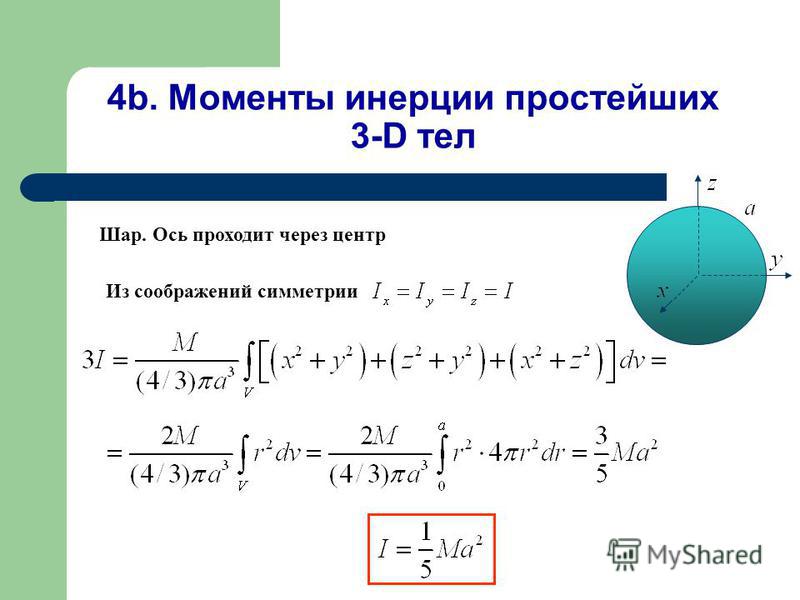
Центр тяжести прямоугольника в точке пересечения его диагоналей, на расстоянии половины высоты (h/2) по вертикали и половины ширины (b/2) по горизонтали.
Площадь
Центральные осевые моменты инерции прямоугольника
Моменты инерции относительно смещенных осей, проходящих через нижнюю левую точку
Осевые моменты сопротивления прямоугольного сечения
Квадрат
Квадрат — это частный случай прямоугольника, у которого высота равна ширине, т.е. h=b=a.
Центр тяжести квадрата находится так же на пересечении диагоналей — на расстоянии половины стороны (a/2) по высоте и ширине.
Площадь
Центральные осевые моменты инерции квадрата
Моменты инерции относительно смещенных осей, проходящих через нижнюю левую точку
Осевой момент сопротивления квадратного сечения
Треугольник равнобедренный
Равнобедренный треугольник высотой h и шириной основания b.
Центр тяжести треугольника располагается в точке пересечения его медиан на расстоянии 1/3 высоты от основания и 2/3 высоты от его вершин.
Площадь
Центральные осевые моменты инерции треугольника
Момент инерции относительно смещенной оси x1, проходящей через его основание
Прямоугольный треугольник
Прямоугольный треугольник высотой h и шириной основания b.
Центр тяжести прямоугольного треугольника располагается аналогично, на пересечении медиан на расстоянии 1/3 высоты от основания и 2/3 высоты от вершины.
Площадь
Центральные осевые моменты инерции прямоугольного треугольника
Моменты инерции относительно смещенных осей x1 и y1, проходящих через точку, соединяющую его катеты
Трапеция
Равнобокая трапеция высотой H и шириной оснований: малого a и большого b.
Площадь трапеции
Центр тяжести на линии, соединяющей середины оснований трапеции, на высоте, определяемой по формуле:
Круг
Круг диаметром D (d) или радиусом R (r)
Площадь круга через его диаметр и радиус
Центральные осевые и полярный моменты инерции круга
Осевые и полярный моменты сопротивления
Полукруг
Половина круга диаметром D (d) или радиусом R (r)
Площадь
Осевые моменты инерции полукруга
Четверть круга
Четверть круга диаметром D (d) или радиусом R (r)
Площадь
Центральные осевые моменты инерции четверти круга
Моменты инерции относительно смещенных осей x1 и y1
Кольцо
Кольцо с внешним диаметром D и внутренним d, (радиусами: внешним R и внутренним r)
Отношение внутреннего диаметра (радиуса) к внешнему обозначается буквой c.
Площадь
Центральные осевые и полярный моменты инерции кольца
Осевые и полярный моменты сопротивления
Тонкостенное сечение (труба)
Тонкостенный профиль (сечение трубы) средним радиусом R0 и толщиной стенки трубы t при R0>>t
Площадь
Центральные осевые и полярный моменты инерции трубного сечения
Осевые и полярный моменты сопротивления
Смотрите также:
Определение координат центра тяжести сложных фигур
Геометрические характеристики сечений
Сохранить или поделиться с друзьями
Вы находитесь тут:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Подробнее
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.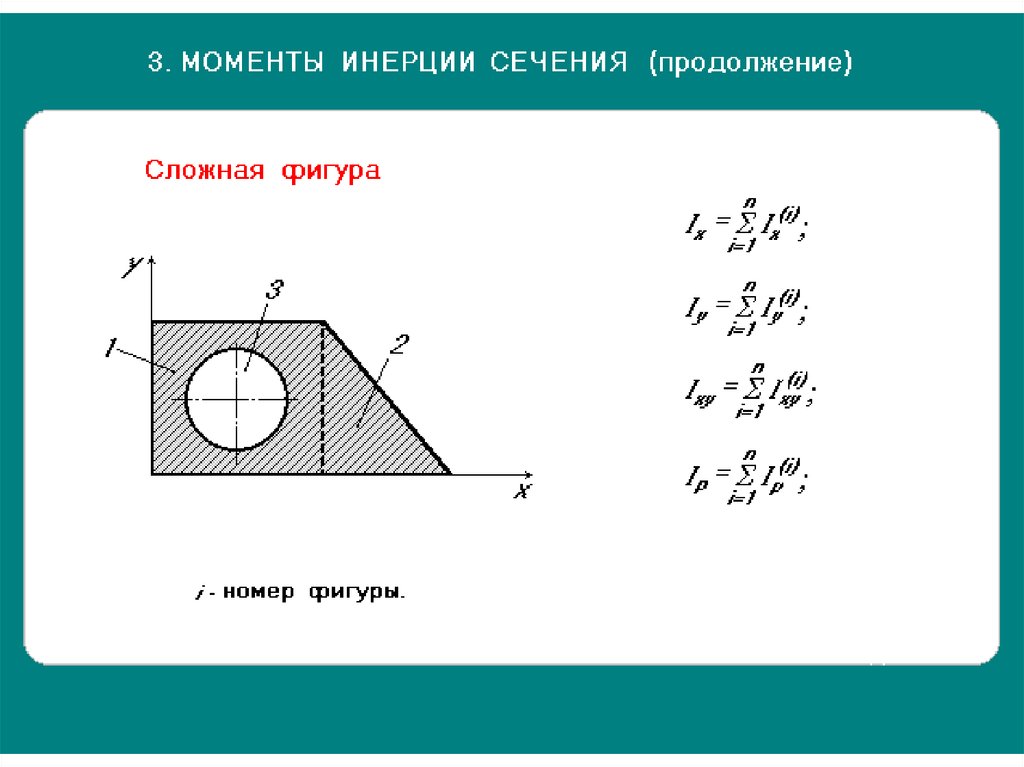
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
На нашем сайте можно бесплатно скачать:
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
Сохранить или поделиться с друзьями
Помощь с решением
ВЫБЕРИТЕ РАЗДЕЛ МЕХАНИКИ
- Техническая механика (техмех)
- Теоретическая механика (теормех)
- Сопротивление материалов (сопромат)
- Строительная механика (строймех)
- Теория механизмов и машин (ТММ)
- Детали машин и ОК (ДМ)
Что такое Момент инерции треугольника? Расчет, пример
В этой статье мы узнаем момент инерции треугольника, а также примеры, расчет и т. д.
Давайте исследуем!
Что такое момент инерции треугольника? Определение
Попробуем разобраться в моменте инерции основ треугольника.
Некоторые основы момента инерции треугольника изложены ниже.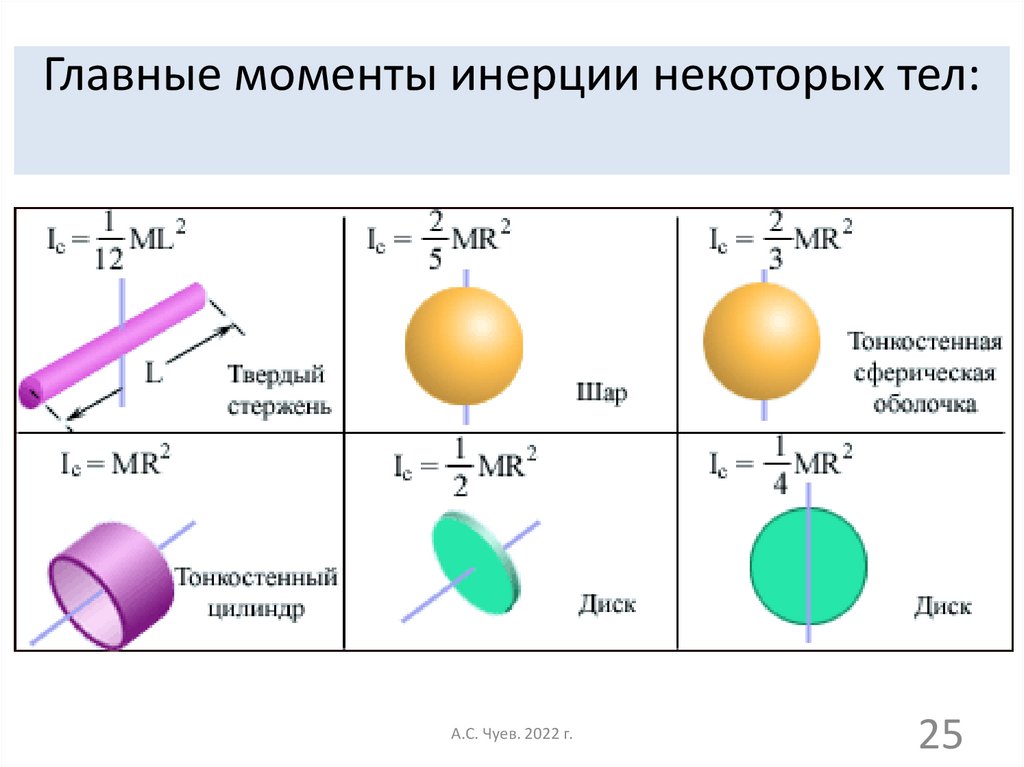
- Момент инерции треугольника можно рассматривать и формулировать в трех основных аспектах. Во-первых, это прохождение оси через центр тяжести. Второй – прохождение линии через базу. Третьей является ось, перпендикулярная основанию.
- Момент инерции любой формы, в том числе треугольника относительно нецентроидальной и произвольной оси можно определить, если уже известен момент инерции центроидальной оси, параллельной первой. В этом случае мы используем теорему о параллельных осях.
Теорема о параллельных осях обычно используется для определения момента инерции составных сечений.
Как выразить момент инерции треугольника?
Выражение Момента инерции треугольника может быть задано разными способами в зависимости от положения оси. Момент инерции треугольника различен для разных положений оси. Есть квадратная мера иногда 3 момента, о которых можно подумать. Они есть;
- Ось проходит через центр масс.
- Ось, проходящая через дно.

- Ось перпендикулярна его основанию.

Мы рассмотрим каждое выражение ниже, а позже мы вычислим и узнаем, как вычислить момент инерции треугольника.
Ознакомьтесь с нашим «Обучающим приложением MechStudies» в iOS и Android
Ось проходит через центр масс.
Момент инерции треугольника с осью, параллельной основанию и проходящей через центр масс, выражается как;
I = bh 3 /36
Здесь
- b = ширина основания и
- h = высота
Ось, проходящая через основание
, представляет собой момент инерции треугольника; если у нас есть тенденция брать ось, проходящую через дно.
I = bh 3 / 12
Мы можем дополнительно использовать теорему о параллельных осях, чтобы доказать выражение везде, где центр масс треугольника находится или находится на расстоянии, способном h/3 от основания.
Ось, перпендикулярная его основанию
Попробуем увидеть момент инерции треугольника, когда его ось перпендикулярна его основанию, мы должны сначала учесть, что ось y’-y’ используется для деления всего треугольника на два правых треугольники, A и B. Эти треугольники, с другой стороны, могут иметь стандартное основание, способное к h, и высоты b1 и b2. Для каждого момент инерции может быть:
Эти треугольники, с другой стороны, могут иметь стандартное основание, способное к h, и высоты b1 и b2. Для каждого момент инерции может быть:
Iy’ = hb1 3 / 12 + hb2 3 / 12
Если мы склонны думать о b 2 = b – b 1 везде, где параллельная ось y-y, проходящая через центр масс, находится на расстоянии ⅔ ( b/2 – b 1 ) от y’-y’, тогда мы можем просто реализовать или вычислить момент инерции.
В какой момент ось треугольника инерции перпендикулярна основаниюМы можем использовать теорему о параллельной оси, чтобы попытаться сделать. Таким образом, в любом случае после чисто математических подстановок мы имеем тенденцию получать выражение в виде:
Iy’ = (hb / 36) (b 2 – b 1 b + b1 2 )
Как рассчитать момент инерции треугольника?
Мы возьмем случай везде, где мы должны увидеть момент инерции относительно центра масс y. Будем учитывать момент инерции y относительно оси координат.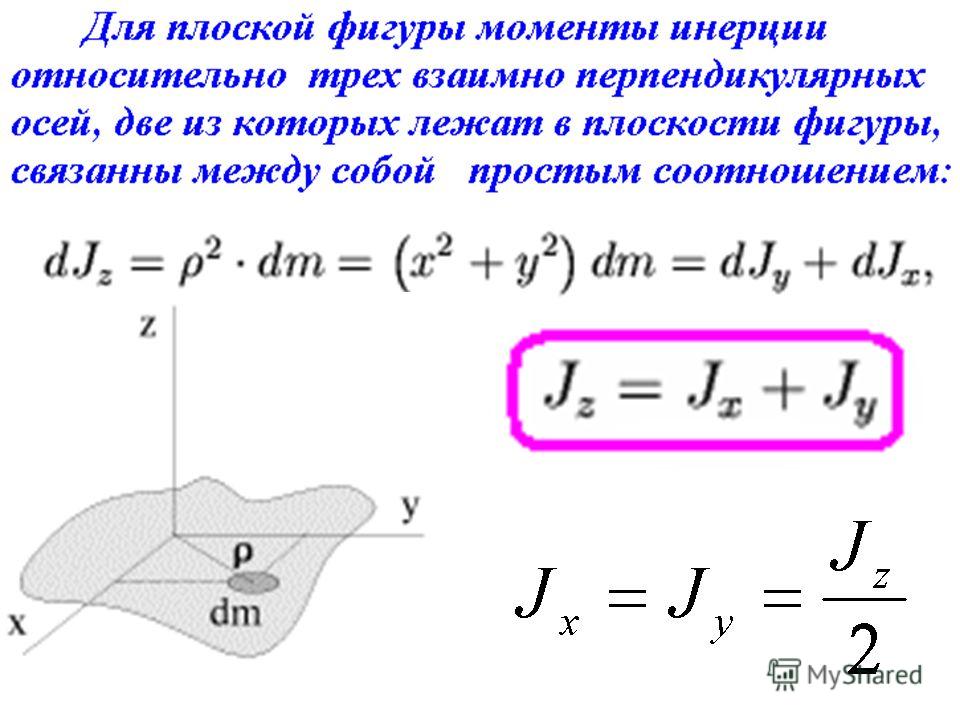
Мы можем использовать теорему о параллельных осях и что в этом случае мы возьмем центр масс в качестве точки отсчета.
Здесь,
I AA ‘ = I BB’ + AD 2
- I BB ‘ = I AA’ — AD 2
- I BB ‘ = (1/1147) BH 7.10047). – 1/2 bh (1/3) h 2
- I BB’ = bh 3 / 36
Далее мы собираемся определить момент инерции при прохождении оси через его базу.
dl x = y 2 дА
дА = l dy
Если у нас есть тенденция брать подобные треугольники, которые у нас будут,
(l / b) = (h – y) / h
l = b (h – y )/h
dA = b [( h – y) / h]dy
Теперь мы проинтегрируем dl x от y = нуля до y = h.
- I x = ∫ Y2 DY
- I x = 0 ∫ H Y 2 B (H — Y)/ H
- I x = B/ H . ∫ ч (ги 2 – у 3 )
- I x = (b/h)[h (y 3 / 3)- (y 4 / 4) ] 0 h h
 ∫ ч (ги 2 – у 3 )
∫ ч (ги 2 – у 3 )Момент инерции треугольной решения, решающей задачу или расчет
Вопрос № 1 Расчет момента инерции равностороннего треугольникаПроблема
902 имеющие массу «m» и длину «l» соединены вместе. Определить момент инерции системы относительно оси, проходящей через ее центр масс и перпендикулярной плоскости треугольника. Какой момент инерции треугольника решил задачу номер одинРешение:
Момент инерции стержня ВС определяется по формуле:
- I 1 = m l 2 0 9 0 9 9 0 Теорема, момент инерции искомого стержня равен:
- I 2 = I 1 + mr 2 = m l 2 / 12 + m ( 1/ 2 9047) 2
Так как треугольник состоит из трех стержней, то момент инерции всех трех стержней равен:
- I = 3I 2
- I = 3 (м l 2 /6)
- I = M L 2 /2
Проблема
Определение.
 прямоугольный треугольник 1) относительно осей x и y 2) относительно центроидальных осей, параллельных осям x и y.
прямоугольный треугольник 1) относительно осей x и y 2) относительно центроидальных осей, параллельных осям x и y.Случай-1
Случай-1: какой момент треугольника инерции решил вторую задачуСлучай-2
Случай-2: какой момент момента треугольник инерции решил вторую задачуРешение:
Случай-1
Нахождение произведения инерции путем прямого интегрирования с теоремой о параллельных осях о вертикальных дифференциальных полосах площадей.
Y= h(1- x/b) d A= ydx = h (1- x/b) dx
X’ el = x y’ el = ½ y= ½ h= (1- x/b)
Теперь, интегрируя d I x от x= 0 до x= b
I xy = ∫ d I xy = ∫ X’ el y’ el d A = b 0/ 2) H 2 (1-X /B) 2 DX
= H 2 B 0 ∫ (x /2-x 2 /b + x 3 /2B 2 ) dx= h 2 ( x 2 / 4 – x 3 /3b + x 4 / 8b 2 ) b
03 0002 I xy = 1/24 b 2 h 2
Случай 2
Мы применим теорему о параллельных осях для определения произведения инерции относительно центроидальных осей.
X’= 1/3 b y’= 1/3 ч ‘ y» = 1/24 b 2 h 2 – (1/3 b) (1/3 h) (1/2 bh) = -1/72 b 2 h 2
Вывод
Таким образом, мы изучили основы МИ треугольника и как рассчитать это значение вместе с примерным расчетом.
Проверьте наши несколько наиболее интересных статей:
Закон о крючках
Moment of Seeria Basics
Бесплатная диаграмма тела
Mohr’s Circle
Кривая напряжения
. Показанные статьи
Moment on inertia — a Artianta — Artiantamors — Artiantamors — Artiantamors – Artianta —В. , Формула и важные часто задаваемые вопросы
МВД треугольника могут быть указаны в различных рамках обсуждения. Эти методы бывают трех типов, таких как:
Прохождение оси через центр тяжести.
Прохождение линии через базу.
Ось, перпендикулярная основанию.

Ниже мы рассмотрим каждое выражение.
1. Прохождение оси через центроид
На рисунке показан треугольник и линия, проходящая через центроид.
Эта линия параллельна основанию треугольника.
[Изображение скоро будет загружено]
Момент инерции выражается как:
I = bh4 / 36
Где
b = ширина основания
h = высота
2. Прохождение линии через основание
прямая проходит через основание, то момент инерции треугольника относительно его основания равен:
I = bh4 / 12
Знаете ли вы о теореме о параллельных осях?
Мы можем рассчитать момент инерции любой фигуры.
Теорема о параллельных осях утверждает, что момент инерции тела относительно оси, параллельной оси, проходящей через центр масс, равен сумме относительно оси, проходящей через центр масс, и произведению массы на квадрат расстояния между двумя осями.
Мы также можем написать теорему о параллельной оси, которая приведена ниже:
I’ = I + Ad 2
[Изображение скоро будет загружено] произвольная ось
I = момент инерции относительно центральной оси, параллельной первой
d = расстояние в пределах двух параллельных осей и площадь формы
Где площадь = bh/2 в случае треугольник
3. Ось, перпендикулярная его основанию
Ниже приведен метод расчета момента инерции треугольника в момент, когда его ось перпендикулярна его основанию.
Во-первых, мы требуем, чтобы линия y’y’ в треугольнике использовалась для деления всего треугольника на два прямоугольных треугольника, соответственно A и B.
[Изображение будет загружено в ближайшее время]
цвета у обоих треугольников разные, а b1 и b2 — основания, а ‘h’ — общая высота треугольников.
Однако для обоих момент инерции будет;
Iy’ = hb13 / 12 + hb13 / 12
Нам нужно учесть, что b2 = b – b1
Здесь параллельная линия (ось) yy/ через центр тяжести
Расстояние от y’-y’ = ⅔ (b2 / 2 – b1)
Таким образом, мы можем просто управлять значением момента инерции ly’. 2dA\] 93}{36}\]
2dA\] 93}{36}\]
Рассмотрим треугольник ABC
Здесь Основание = b, Высота = h
Рассмотрим элементарную полосу PQ на расстоянии ‘x’ от вершины ‘A’
[Изображение будет загружено скоро]
Момент инерции PQ относительно основания BC будет
(h – x)2 da……(1)
da = PQ * dx…..(2)
Из геометрически подобных треугольников ABC и APQ
Мы получили уравнение как
PQ / BC = x / h
Здесь BC можно записать как 93}{36}\]
Момент инерции — Страница 2
Щелкните или коснитесь проблемы, чтобы увидеть решение.
Пример 5
Найти момент инерции прямого кругового конуса массой m , радиусом основания R и высотой H относительно его центральной оси.
Пример 6
Прямоугольный однородный треугольник с катетами a и b и массой m вращается вокруг катета b .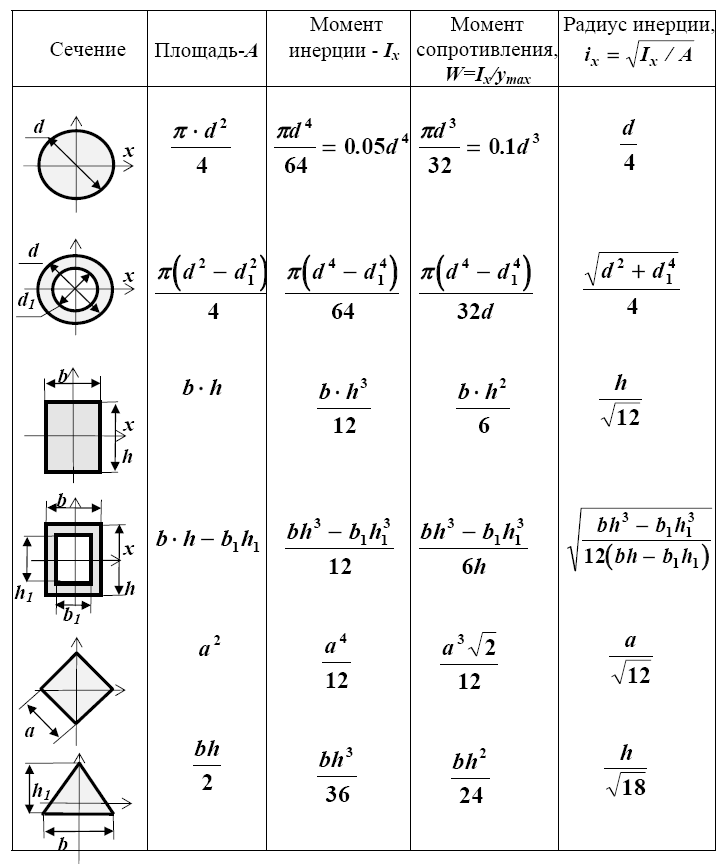 Вычислите момент инерции треугольника. 92}\] и имеет массу \(m.\). Найти момент инерции пластинки относительно оси \(x-\).
Вычислите момент инерции треугольника. 92}\] и имеет массу \(m.\). Найти момент инерции пластинки относительно оси \(x-\).
Пример 8
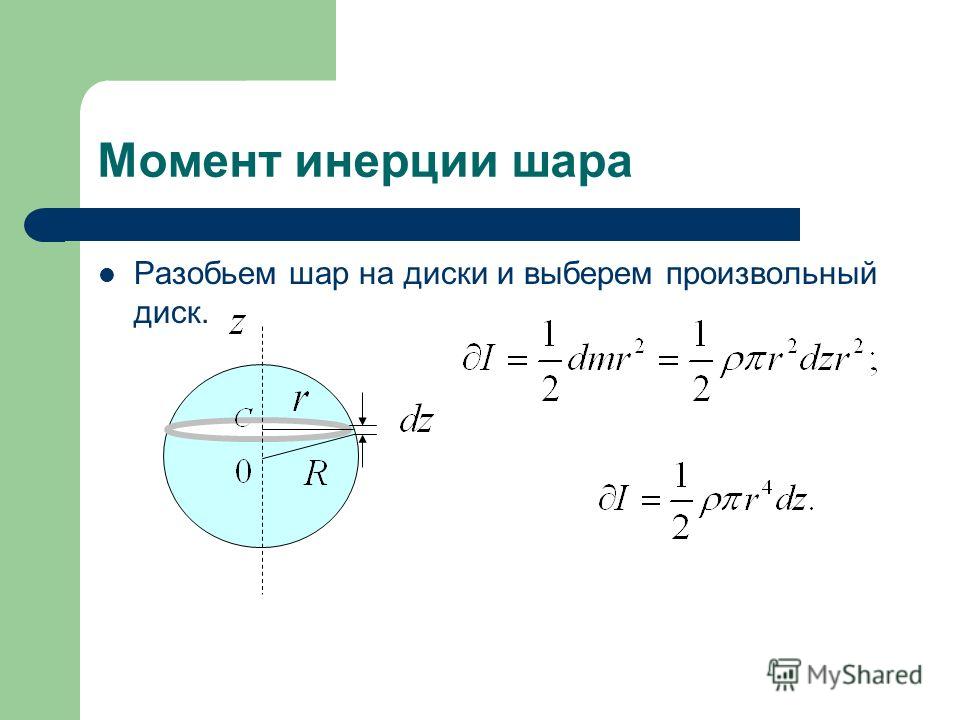
Найти момент инерции однородного шара массы \(m\) и радиуса \(R\) относительно диаметра.
Пример 9
Однородная пластинка массы \(m\) ограничена экспоненциальной кривой \[y = \exp \left({-x}\right)\] и осями координат. Найти момент инерции пластинки относительно оси \(у-\).
Пример 10
Дан эллипс с большой полуосью \(a\) и малой полуосью \(b.\). Найти момент инерции эллипса относительно оси \(y-\). 92}\rho \left( x \right)f\left( x \right)dx} .\]
Функция \(f\left( x \right)\) есть гипотенуза \(AB\) треугольника. Мы можем легко вывести его уравнение, используя двухточечную форму:
\[\frac{{x — {x_A}}}{{{x_B} — {x_A}}} = \frac{{y — {y_A}}}{{{y_B} — {y_A}}},\ ;\; \Rightarrow \frac{{x — a}}{{0 — a}} = \frac{{y — 0}}{{b — 0}},\;\; \Rightarrow 1 — \frac{x}{a} = \frac{y}{b},\;\; \Rightarrow y = f\left( x \right) = b — \frac{b}{a}x.