
Механические характеристики и свойства синхронных электродвигателей
Страница 5 из 54
Синхронным называют такой электродвигатель переменного тока, у которого угловая скорость (частота вращения) ротора одинакова с угловой скоростью (частотой вращения) вращающегося поля, т. е. ω=ω0 (п=n0).
При работе синхронного электродвигателя питание статорной обмотки производится переменным током, а роторной — постоянным. Роторная обмотка называется обмоткой возбуждения, а питающий ее постоянный ток — током возбуждения. Взаимодействие магнитных полей ротора и статора создает электромагнитный вращающий момент. Однако, поскольку переменный ток меняет свое направление с частотой 50 периодов в секунду (50 Гц), при включении двигателя ротор не может сразу начать вращение и вибрирует, так как испытывает непрерывные толчки в обе стороны. Для того чтобы можно было запустить синхронный двигатель в ход, его ротор, кроме обмотки возбуждения, снабжают дополнительной пусковой обмоткой (короткозамкнутой или фазной) —с такой обмоткой двигатель включается как обычный асинхронный электродвигатель от полного или пониженного напряжения сети.

На рис. 6,а изображена схема питания обмотки возбуждения ОВ синхронного двигателя СД от вращающегося возбудителя В (генератора постоянного тока) с обмоткой возбуждения ОВВ и реостатом возбуждения РВ. При пуске синхронного двигателя вследствие большой частоты вращения электромагнитного поля относительно неподвижного ротора на концах обмотки возбуждения (на кольцах ротора) возникают большие напряжения, опасные для изоляции ротора. Для предотвращения этого обмотку возбуждения перед пуском замыкают на разрядное сопротивление СР, которое отключается контактором КВ1 одновременно с включением постоянного тока двухполюсным контактором КВ2. Для механизмов, не требующих при пуске больших моментов (например, центробежных насосов и вентиляторов), применяют схему без разрядного сопротивления, с глухим подключением возбудителя к обмотке возбуждения (рис. 6,б), а в качестве разрядного используют сопротивление обмотки возбуждения возбудителя ОВВ.
Рис. 7. Механическая характеристика синхронного электродвигателя
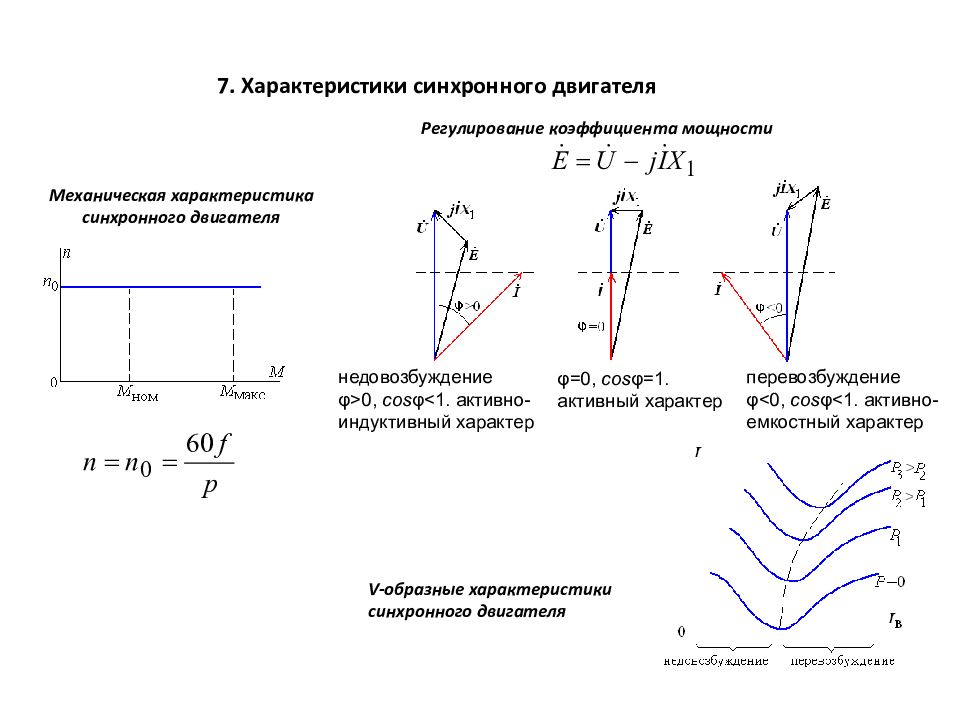
Механическая характеристика синхронного электродвигателя обусловлена его основным свойством — постоянной угловой скоростью (частотой вращения) и представляется в виде прямой линии, параллельной оси моментов. Как видно из рис. 7, механическая характеристика обрывается при М=Мmаx. Это означает, что при колебаниях нагрузки, не превышающих Mmax, значение мгновенной угловой скорости колеблется около средней величины, весьма близкой к ω0. При значительном увеличении момента нагрузки (больше Mmax) двигатель выпадает из синхронизма и останавливается или переходит в асинхронный режим. Во избежание выпадения из синхронизма при случайных толчках нагрузки синхронные двигатели делают такими, что их максимальный момент в 2—2,5 раза больше номинального Mmax=(2:2,5)Мnom.
Пуск синхронного двигателя характеризуется тремя моментами: пусковым Мпуск, необходимым для трогания двигателя с места под нагрузкой; входным Мвх, при входе в синхронизм, т. е. при угловой скорости, близкой к синхронной (0,95-:-0,98ω0), и максимальным Ммах (критическим), при синхронной скорости и номинальных напряжении и токе возбуждения ротора. Минимальные моменты, необходимые для пуска механизмов насосных и компрессорных станций, приведены в табл. 5.
Пуск синхронных электродвигателей может быть осуществлен как от полного, так и от пониженного напряжения, в зависимости от мощности питающей сети. Способы ограничения пускового тока, если прямой пуск недопустим, те же, что и для асинхронных двигателей (включение активных и реактивных сопротивлений и автотрансформаторов в цепь статора).
Минимальные моменты синхронных двигателей, необходимые для пуска механизмов
Статор синхронного электродвигателя, будучи присоединен к сети переменного тока, получает от нее необходимую для намагничивания реактивную мощность. Ротор намагничивается подаваемым в него током возбуждения (постоянным током). При малом токе возбуждения электродвигатель потребляет из сети реактивную мощность, при большом — отдает ее в сеть. В первом случае говорят, что двигатель работает с отстающим коэффициентом мощности, во втором — с опережающим коэффициентом мощности.
Ротор намагничивается подаваемым в него током возбуждения (постоянным током). При малом токе возбуждения электродвигатель потребляет из сети реактивную мощность, при большом — отдает ее в сеть. В первом случае говорят, что двигатель работает с отстающим коэффициентом мощности, во втором — с опережающим коэффициентом мощности.
Рис. 8. Схемы электродвигателей постоянного тока с последовательным (а), параллельным (б) и смешанным (а) возбуждением
Свойство синхронных электродвигателей отдавать в сеть реактивную мощность используют для компенсации недостающей в сети реактивной мощности, т. е. для улучшения коэффициента мощности сети.
МЕХАНИЧЕСКАЯ И УГЛОВАЯ ХАРАКТЕРИСТИКИ СИНХРОННОГО ДВИГАТЕЛЯ
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД В ПРОКАТНОМ ПРОИЗВОДСТВЕ
Как было показано, в синхронном Двигателе скорость вращения ротора равна синхронной скорости вращения статора и не зависит от нагрузки, т. е. механическая характеристика синхронного двигателя представляет прямую, параллельную оси абсцисс (абсолютно жесткая механическая характеристика, рис.
легко получить на основании упрощенной векторной диаграммы синхронного двигателя (см. рис 30, в) Так как при построении упрощенной векторной диаграммы принято = 0, то активная |
(11.96) (11.97) (II 98) (II 99) v…… (И 100) Это выражение является угловой характеристикой синхронного двигателя M = MmaxSin0. (11.101) На рис, 31, б приведена угловая характеристика для двигательного и генераторного режимов. |
буждения повышает максимальный момент и наоборот. Этим свойством пользуются при работе привода на ударную нагрузку. В момент пиковой нагрузки (например, при захвате металла валками) повышают ток возбуждения (увеличением напряжения возбудителя), увеличивая тем самым Л1шах (Е0) и устойчивость двигателя.
Учитывая, что перегрузочная способность двигателя Я = _ Mmax _ Sin 90_ должна бЫТЬ не ниже 2—З, ЛЄГКО ОПрЄДЄЛИТЬ
угол 0Н*. sin 0Н = 0,5-7-0,33, а значит, 0Н = 30-т-20°.
Синхронные двигатели в прокатных цехах получили широкое распространение для привода нерегулируемых приводов черновой группы клетей непрерывных станов и для вращения мощных генераторов в системах Г—Д.
Из тормозных режимов работы в приводе с синхронным двигателем в основном применяют динамическое торможение. Для этого обмотки статора отключают от сети и замыкают на сопротивления В этом случае двигатель работает в режиме синхронного генератора р механические характеристики аналогичны характеристикам при динамическом торможении асинхронного двигателя. в сеть реактивную мощность и исправлять тем самым cos ф сети потребителя.
в сеть реактивную мощность и исправлять тем самым cos ф сети потребителя.
Улучшение COS ф легко понять из рассмотрения упрощенной векторной диаграммы (рис. 30, в). Если при той же нагрузке двигателя увеличивать ток возбуждения (перевозбуждать ма — Шину), то это приведет к росту Е0, и суммарный вектор 11фХ3 = е= U 1(ь — Е0 будет менять фазу относительно питающего напряжения £71ф. Можно обеспечить такое возбуждение двигателя, чтобы вектор /1фХ5 был перпендикулярен вектору t/ц,, тогда вектор тока /1ф будет совпадать с вектором [/іф, т. е. ф = 0 и cos ф = 1. Дальнейшее увеличение силы тока возбуждения (Е0) приводит к тому, что угол между £/1ф и /хфХ5 становится больше 90° и, следовательно, вектор тока /1ф будет опережать вектор £У1ф и угол ф будет отрицательным, т. е. двигатель будет отдавать реактивную энергию в сеть.
При данной полезной мощности двигателя Рх = 3£/1ф/1ф X X cos фЮ-3 ток /1ф, определяющий количество меди в двигателе, увеличивается с уменьшением cos ф, что приводит к увеличению размеров двигателя и его стоимости. Одновременно растет количество меди, размеры и стоимость генераторов, трансформаторов, аппа
Одновременно растет количество меди, размеры и стоимость генераторов, трансформаторов, аппа
ратуры и сети Поэтому электрические станции для потребителей устанавливают тариф на электроэнергию в зависимости от значения cos ф. Чем выше cos ф, тем ниже стоимость электроэнергии по тарифу.
Синхронные двигатели в качестве прокатных более надежны по сравнению с асинхронными Это обусловливается значительно большим (в 3—4 раза) воздушным зазором между статором и ротором, а также низким напряжением в роторе двигателя Малый зазор у асинхронного двигателя необходим для уменьшения намагничивающего тока и улучшения cos ф Кпд синхронного двигателя на 0,5—3% выше, чем у асинхронных двигателей той же мощности К достоинству синхронного двигателя следует также отнести простоту конструкции и надежность в эксплуатации
К числу недостатков электропривода с синхронным двигателем относится необходимость в постоянном токе для возбуждения двигателя и необходимость специальных пусковых обмоток для получения приемлемых пусковых характеристик
Синхронный двигатель развивает вращающий момент лишь при условии, когда ротор вращается синхронно с вращающимся магнитным полем статора. При неподвижном роторе вращающий момент отсутствует. Поэтому для разгона синхронного двигателя ротор последнего снабжается короткозамкнутой обмоткой, стержни которой закладываются в полюсные наконечники. Двигатель пускается в ход как асинхронный короткозамкнутый При достижении 95—98% синхронной скорости в обмотку возбуждения подается постоянный ток и ротор в результате взаимодействия магнитных потоков статора и ротора втягивается в синхронизм и продолжает работать, как синхронный. Так как при синхронной скорости пусковая короткозамкнутая обмотка не пересекает магнитных линий, то в ней не наводится э д с и по ней не протекает ток.
При неподвижном роторе вращающий момент отсутствует. Поэтому для разгона синхронного двигателя ротор последнего снабжается короткозамкнутой обмоткой, стержни которой закладываются в полюсные наконечники. Двигатель пускается в ход как асинхронный короткозамкнутый При достижении 95—98% синхронной скорости в обмотку возбуждения подается постоянный ток и ротор в результате взаимодействия магнитных потоков статора и ротора втягивается в синхронизм и продолжает работать, как синхронный. Так как при синхронной скорости пусковая короткозамкнутая обмотка не пересекает магнитных линий, то в ней не наводится э д с и по ней не протекает ток.
Пусковые механические характеристики асинхронного режима синхронного двигателя подобны х-арактеристикам короткозамкнутых двигателей. Подбором материала пусковой обмотки и формы стержней можно получить приемлемую пусковую характеристику. При пуске синхронного двигателя обмотка возбуждения отсоединяется от сети постоянного тока, однако оставлять ее разомкнутой нельзя, так э. д. с., наводимая в обмотке ротора, может достигнуть большой величины и может быть нарушена изоляция машины Поэтому на время пуска обмотку возбуждения замыкают на разрядное сопротивление, которое в 5—10 раз больше сопротивления обмотки возбуждения. Разрядное сопротивление включается в цепь обмотки до начала пуска и отключается после подачи возбуждения. В последнее время на металлургических заводах для упрощения операции пуска синхронных двигателей все шире внедряется пуск методом самосинхронизации с подключенным возбудителем (так называемый «глухой пуск») В этом случае обмотка возбуждения подключается наглухо к якорю возбудителя, который в процессе пуска сэмовозбуждается и обеспечивает втягивание двига — теля в синхронизм. Опыт показывает, что при статическом моменте сопротивления на валу двигателя Мс = (0,25-і-0,35) Мн обеспечивается нормальный пуск двигателя.
д. с., наводимая в обмотке ротора, может достигнуть большой величины и может быть нарушена изоляция машины Поэтому на время пуска обмотку возбуждения замыкают на разрядное сопротивление, которое в 5—10 раз больше сопротивления обмотки возбуждения. Разрядное сопротивление включается в цепь обмотки до начала пуска и отключается после подачи возбуждения. В последнее время на металлургических заводах для упрощения операции пуска синхронных двигателей все шире внедряется пуск методом самосинхронизации с подключенным возбудителем (так называемый «глухой пуск») В этом случае обмотка возбуждения подключается наглухо к якорю возбудителя, который в процессе пуска сэмовозбуждается и обеспечивает втягивание двига — теля в синхронизм. Опыт показывает, что при статическом моменте сопротивления на валу двигателя Мс = (0,25-і-0,35) Мн обеспечивается нормальный пуск двигателя.
Процесс пуска синхронного двигателя автоматизирован и сводится к нажатию кнопки «Пуск» или к повороту рукоятки универсального переключателя.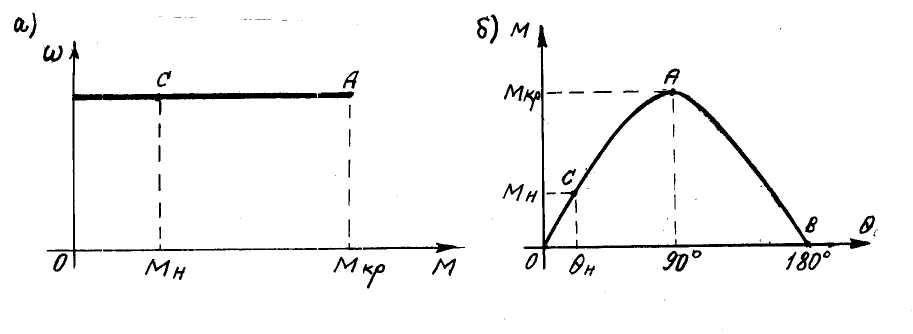
■Ч- В случае подачи на вход разомкнутой одноконтурной системы гармонического колебания синусоидального типа с угловой частотой ш (для удобства синусоидальную функцию, изображаемую на комплексной плоскости вектором, заменяют показательной функцией с …
В замкнутых системах автоматического управления под действием различных возмущений возникает переходный процесс, характеризующий переход системы из одного установившегося состояния к другому. Характер переходного процесса зависит от свойств и характеристик системы, …
Электромашинные преобразователи частоты включают вращающиеся электрические машины, имеют механический метод управления частотой, громоздки в своем исполнении. Развитие силовой полупроводниковой техники привело к созданию регулируемых электроприводов переменного тока, получающих питание от …
Механическая характеристика — синхронный двигатель
Механическая характеристика — синхронный двигатель
Cтраница 1
Механические характеристики синхронного двигателя в этом режиме подобны механическим характеристикам динамического торможения асинхронных двигателей. [1]
[1]
Механическая характеристика синхронного двигателя представляет прямую, параллельную оси абсцисс ( ряс. При изменении нагрузки двигателя изменяется угол б между осью основного потока ротора и результирующего потока статора. [3]
Рассмотрим теперь механическую характеристику синхронного двигателя. [4]
Что называется механической характеристикой синхронного двигателя и как она строится. [5]
Какой вид имеет механическая характеристика синхронного двигателя. [6]
Основным отличительным свойством механической характеристики синхронного двигателя является ее абсолютная жесткость. При неизменной частоте питающего тока скорость вращения ротора машины остается строго постоянной с изменением нагрузочного момента от нуля до выпадения из синхронизма. Таким образом, механическая характеристика синхронного двигателя имеет вид прямой, параллельной оси абсцисс, если по горизонтали отложить вращающий момент, развиваемый двигателем, а по оси ординат-скорость.
[7]
Таким образом, механическая характеристика синхронного двигателя имеет вид прямой, параллельной оси абсцисс, если по горизонтали отложить вращающий момент, развиваемый двигателем, а по оси ординат-скорость.
[7]
Чем объясняется жесткость механической характеристики синхронного двигателя. [8]
Представленная на рис. 14 механическая характеристика синхронного двигателя типа ВДС 325 / 29 — 24 мощностью 2 000 кет на номинальное напряжение 10 кв, предназначенного для привода крупного вертикального водяного насоса, рассчитана на легкие условия пуска насосного агрегата. Механическая характеристика насоса ( линия IV на рис. 14) в диапазоне изменений скольжений асинхронного пуска лежит ниже характеристики двигателя, благодаря чему обеспечивается нормальный пуск насосного агрегата. [9]
На рис.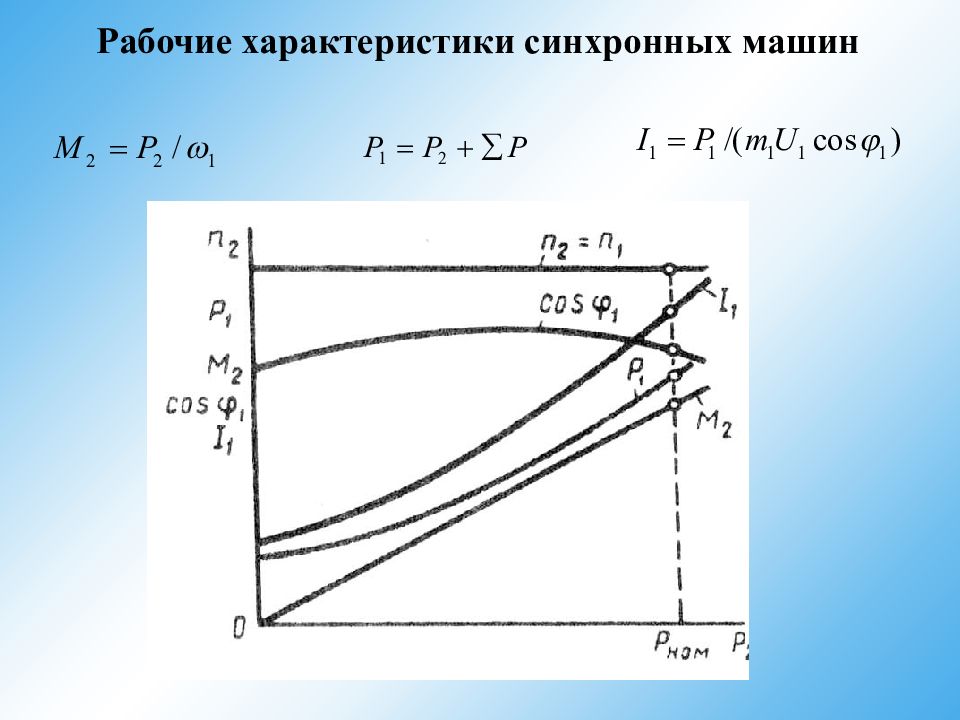 13 — 11 приведена механическая характеристика синхронного двигателя.
[11]
13 — 11 приведена механическая характеристика синхронного двигателя.
[11]
На рис. 13 — 13 приведена механическая характеристика синхронного двигателя. [12]
На рис. 13 — 18 приведена механическая характеристика синхронного двигателя. [14]
Какая из характеристик рис. 11.13 является механической характеристикой синхронного двигателя. [15]
Страницы: 1 2
Механическая и угловая характеристики синхронных электродвигателей
Категория:
Электрооборудование строительных машин
Публикация:
Механическая и угловая характеристики синхронных электродвигателей
Читать далее:
Механическая и угловая характеристики синхронных электродвигателей
Синхронные двигатели начинают широко внедрять в строительное производство, применяя их для привода машин средней и большой мощности, не требующих регулирования скорости: компрессоров, насосов, камнедробилок, экскаваторов.
Синхронный двигатель имеет неизменную скорость вращения, поэтому его механическая характеристика представляет прямую линию, параллельную оси абсцисс. В квадранте координатной системы она характеризует двигательный, а в квадранте — генераторный режим (рис. 35,а).
Рекламные предложения на основе ваших интересов:
Рис. 35. Механическая и угловая характеристики синхронного двигателя
а — механическая характеристика; б — угловая характеристика
Синхронный двигатель обладает абсолютно жесткой механической характеристикой. Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается.
При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз © при этом возрастает. Увеличению угла © соответствует рост момента синхронного двигателя. Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Синхронный двигатель может работать и генератором с отдачей энергии в сеть при синхронной скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение. Такой режим используется в сетевых двигателях преобразовательной группы системы Г—Д. Для целей торможения такой режим практического значения не имеет, поскольку при этом нельзя получить снижения скорости.
Торможение синхронных двигателей противовключе-нием практически не применяется из-за больших толчков тока и усложненной аппаратуры управления. Вместо этого обычно применяют динамическое торможение.
При динамическом торможении синхронного двигателя к кольцам ротора подводится постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного двигателя в этом режиме будут подобны характеристикам асинхронного двигателя при динамическом торможении.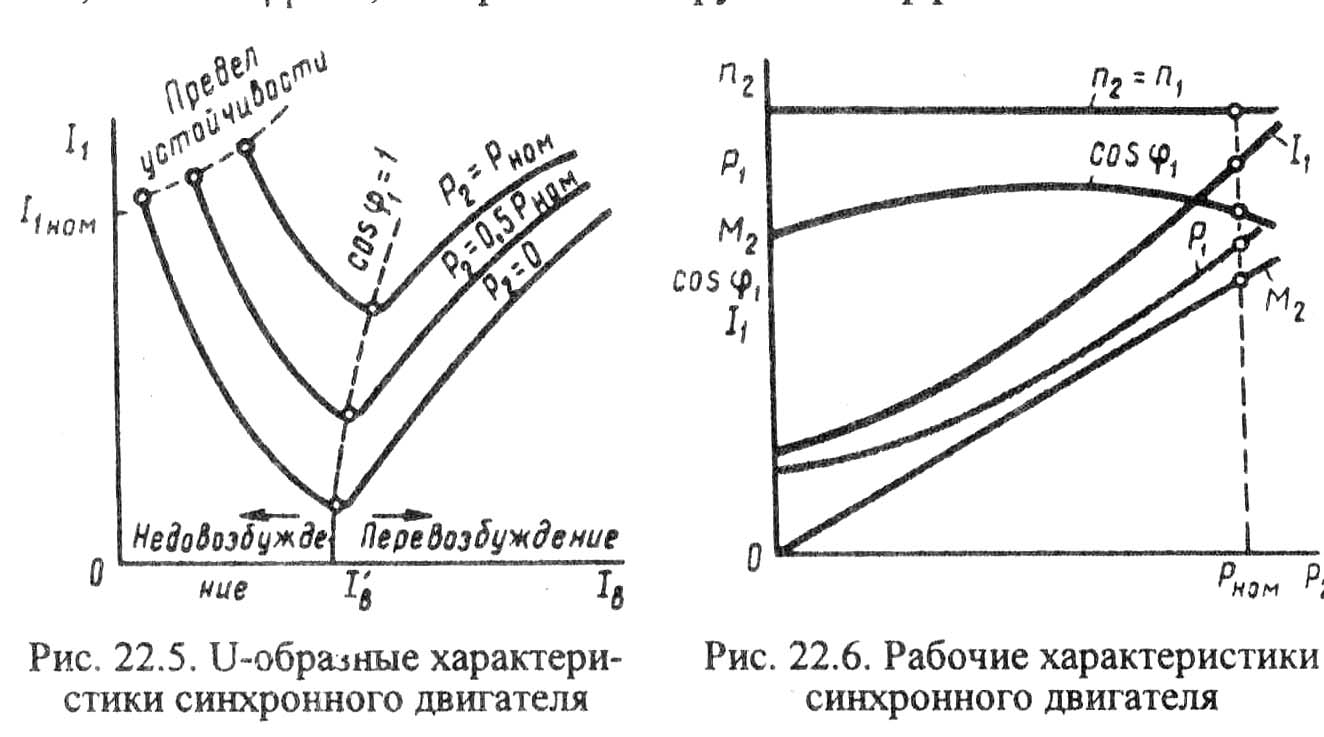
Современные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозам-кнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, поэтому в пусковых режимах он обладает асинхронной характеристикой.
Хотя синхронный двигатель является несколько более сложной машиной, чем асинхронный двигатель с ко-роткозамкнутым ротором (из-за наличия у первого возбудителя, колец и щеточного устройства), тем не менее он применяется очень широко, заменяя асинхронный электродвигатель. Объясняется- это главным образом тем, что синхронный двигатель может работать с опережающим cos ф, отдавая в сеть реактивную мощность, необходимую для возбуждения асинхронных машин и трансформаторов. Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться.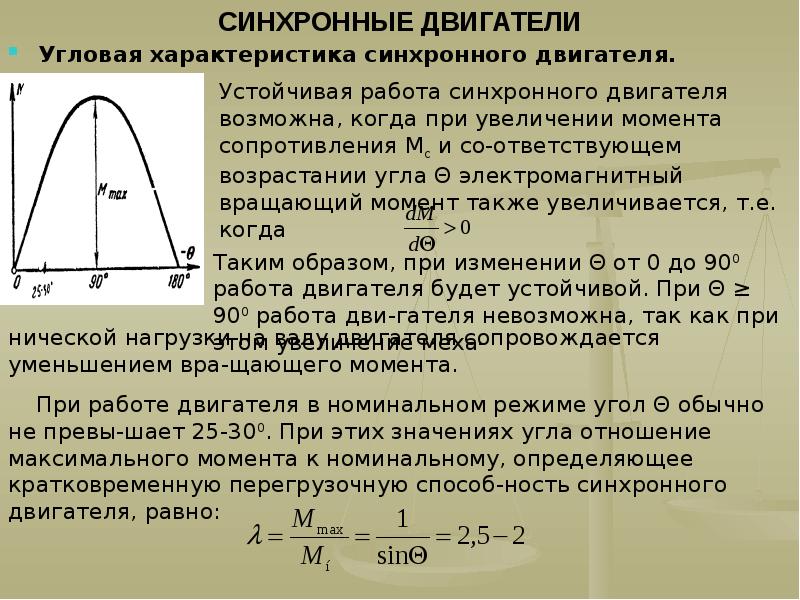 Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Для уменьшения величины пусковых токов и связанного с ними снижения напряжения, особенно в сетях небольшой мощности, пуск синхронных двигателей осуществляется обычно через реактор, а в некоторых случаях— через автотрансформатор. Ограничение пусковых токов защищает обмотки двигателей от повышенных динамических нагрузок, возникающих при прямом включении в сеть.
Рекламные предложения:
Читать далее: Синхронное вращение двух асинхронных электродвигателей в системе электропривода
Категория: — Электрооборудование строительных машин
Главная → Справочник → Статьи → Форум
Синхронные Характеристика — Энциклопедия по машиностроению XXL
Из уравнений (4. 7) видно, что Ёф является функцией 1а, а следовательно, /ф, т. е. ЭДС источника определяется режимом работы. цепи. В частном случае неявнополюсной синхронной машины, когда xa=xq, Ёф определяется только ЭДС возбуждения и не зависит от тока цепи. Если учесть также влияние магнитного насыщения, то в общем случае не только ЭДС, но и параметры схемы замещения будут иметь нелинейные характеристики в зависимости от тока цепи. Тем не менее переход к схемам замещения и векторным диаграммам позволяет использовать для решения хорошо известные методы расчета линейных и нелинейных электрических цепей постоянного и переменного тока.
[c.88]
7) видно, что Ёф является функцией 1а, а следовательно, /ф, т. е. ЭДС источника определяется режимом работы. цепи. В частном случае неявнополюсной синхронной машины, когда xa=xq, Ёф определяется только ЭДС возбуждения и не зависит от тока цепи. Если учесть также влияние магнитного насыщения, то в общем случае не только ЭДС, но и параметры схемы замещения будут иметь нелинейные характеристики в зависимости от тока цепи. Тем не менее переход к схемам замещения и векторным диаграммам позволяет использовать для решения хорошо известные методы расчета линейных и нелинейных электрических цепей постоянного и переменного тока.
[c.88]
Для иллюстрации изложенного рассмотрим регулируемый по напряжению синхронный генератор. Переходные процессы генератора описываются уравнениями Парка — Горева при постоянной частоте вращения. Насыщение учитывается по продольной оси с помощью характеристики холостого хода.
 Система регулирования напряжения включает возбудитель и быстродействующий транзисторный регулятор. Возбудитель описывается апериодическим звеном с нелинейным коэффициентом усиления, учитывающим магнитное насыщение возбудителя. Уравнения регулятора включают переменные коэффициенты, определяемые с помощью нелинейных статических характеристик. Нагрузка генератора является активно-индуктивной и описывается уравнениями в осях d, q.
[c.98]
Система регулирования напряжения включает возбудитель и быстродействующий транзисторный регулятор. Возбудитель описывается апериодическим звеном с нелинейным коэффициентом усиления, учитывающим магнитное насыщение возбудителя. Уравнения регулятора включают переменные коэффициенты, определяемые с помощью нелинейных статических характеристик. Нагрузка генератора является активно-индуктивной и описывается уравнениями в осях d, q.
[c.98]Структурный граф для блока электромагнитного расчета установившихся режимов синхронного генератора приведен на рис. 5.4. Здесь часть входных данных в виде номинальных НД и обмоточных ОД и характеристик марок сталей (Ст) представлена объединенными ветвями, для того чтобы отметить специфику этих дан- [c.125]
На рис. 13 приведены механические характеристики п = f (М) двигателей различных типов. Для синхронного двигателя характеристика абсолютно жесткая. Штриховой линией показана полная характеристика асинхронного двигателя. [c.125]
[c.125]
Для асинхронных электродвигателей с к. з. ротором и для синхронных двигателей механическая характеристика определяет его пусковой момент. При оценке требуемого пускового момента двигателя следует учитывать, что у ряда механизмов, в особенности таких, где трение составляет значительную часть нагрузки, пусковой момент превышает на 30—50% расчетный статический момент сопротивления при движении. [c.127]
Колебания скорости звена приведения при работе машинного агрегата приводят к изменению момента движущей силы Мд, так как для большинства двигателей Мд является функцией ш (см. гл. 22). У ряда двигателей — синхронных электродвигателей, гидродвигателей и др. (см. гл. 20), имеющих жесткую характеристику, эти колебания незначительны. Но для некоторых (асинхронных, постоянного тока с параллельным возбуждением и др.) они существенны. Поэтому для более точного определения момента инерции маховика следует учитывать характеристику двигателя.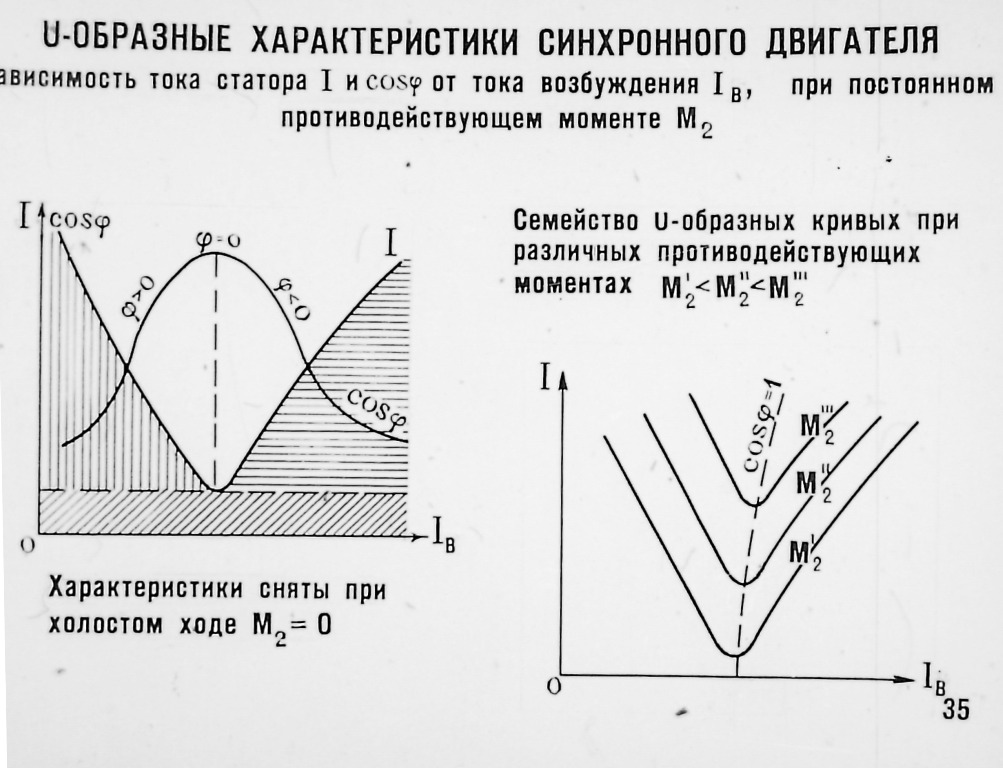 Если участок
[c.345]
Если участок
[c.345]
Особенность ЭМ гистерезисного типа, связанная с принципиальной нелинейностью и неоднозначностью характеристик материала ротора и отсутствием стабилизации его магнитного состояния, не позволяет в полной мере распространить на него приведенную обобщенную модель, построенную в предположении линеаризации. Однако рассматривая даже из самых общих физических представлений идеализированную гистерезисную ЭМ при любом скольжении в системе координат, связанных с полюсами ротора (но не с его телом ), как ЭМ с магнитным возбуждением, работающую в синхронном режиме, можно использовать полученные соотношения и для описания ее установившихся режимов. Полностью справедливо это, правда, лишь при монотонном изменении нагрузки, напряжения и других факторов, меняющих магнитный поток ЭМ. В противном случае наблюдается неоднозначность характеристик, связанная с гистерезисом материала. В последнее время в развитие обобщенной теории ЭМ появляется и более строгое математическое описание процессов в гистерезисных ЭМ [42]. [c.113]
[c.113]
Поскольку значение нагрузки на диаграмме Р — о не зависит от места измерения смещений, то последние целесообразно измерять вблизи точек приложения нагрузки или вблизи средней точки линии фронта трещины. По синхронно регистрируемым диаграммам Р — Vp можно дополнительно к силовой характеристике Ki определять и деформационную 6i характеристику трещиностойкости материала. Такой подход позволяет комплексно, с единых методических позиций, оценивать трещиностойкость материала как в хрупком, так и в пластическом состояниях. Отметим, что описанная методика определения характеристики Ki строго обоснована только при испытании хрупких материалов, разрушающихся в линейно-упругой области. [c.741]
Кривая Л1д(оз) асинхронного двигателя имеет четыре главные точки точку С, определяемую синхронной угловой скоростью соответствующей идеальному холостому ходу, когда потери в двигателе и нагрузочный момент равны нулю точку Я, определяемую номинальным моментом М , соответствующим эффективной мощности двигателя, гарантируемой заводом-изготовителем точку М, определяемую максимальным моментом М а с и минимально допустимой угловой скоростью рабочей части характеристики точку О,
[c. 369]
369]
Характеристика асинхронного электродвигателя (рис. 224, б) состоит из двух частей часть характеристики, расположена левее Мт х, неустойчивая, а часть, расположенная правее Мтах. устойчивая. Для работы используют правую —устойчивую— часть характеристики. Уменьшение угловой скорости ниже соответствующей Мтш, недопустимо, так как двигатель переходит на неустойчивую часть характеристики поэтому максимальный момент часто называют опрокидывающим моментом. Угловую скорость, при которой Мд=0, называют синхронной скоростью (0 . [c.291]
| Рис. 33. Синхронные зависимости характеристик уходящих газов от коэффициента избытка воздуха а |
 Для их пуска создаются специальные пусковые характеристики иди вспомогательные устройства, например, короткозамкнутые обмотки в синхронных ЭД.
[c.92]
Для их пуска создаются специальные пусковые характеристики иди вспомогательные устройства, например, короткозамкнутые обмотки в синхронных ЭД.
[c.92]Для электрических коррозионных исследований часто бывает нужно иметь несколько измерительных самопишущих приборов, ведущих синхронную запись эти приборы иногда оказываются довольно тяжелыми. Чтобы можно было быстро и надежно доставить их к отдаленным точкам измерения на местности, целесообразно размещать такие приборы в передвижной лаборатории на автомобильном шасси. Для работ по обслуживанию и контрольных измерений обычно бывает достаточно иметь комбинированный легковой автомобиль. Напротив, для длительной записи блуждающих токов рекомендуется применять автомобиль с крытым кузовом, в котором можно было бы работать стоя. В разделе З.З (табл. 3.2) приведены характеристики важнейших измерительных приборов. Время для сборки электрических измерительных схем может быть сокращено благодаря применению щита с распределительными шинами (швейцарского щита), подключенного к измерительным клеммам на наружной стенке передвижной лаборатории и к рабочим клеммам измерительных приборов. Для электрического питания и обеспечения работы самопишущих приборов целесообразно иметь аккумуляторную батарею на 12 В и умформер (генератор) на 220 В. Все результаты, данные о длительности измерений, времени их проведения и прочие факторы могут быть прямо на месте занесены в протокол измерений. При колебаниях измеряемых величин во времени
[c.81]
Для электрического питания и обеспечения работы самопишущих приборов целесообразно иметь аккумуляторную батарею на 12 В и умформер (генератор) на 220 В. Все результаты, данные о длительности измерений, времени их проведения и прочие факторы могут быть прямо на месте занесены в протокол измерений. При колебаниях измеряемых величин во времени
[c.81]
При воздействии блуждающих токов обычно приходится синхронно определять одновременно несколько величин, непрерывно меняющихся во времени. Для этой цели лучше всего подходят сдвоенные самопишущие устройства. Приборы с непрерывной записью кривой, имеющие измерительные механизмы с прямым показанием, для измерения потенциалов не могут быть использованы, поскольку вращающий момент измерительного механизма у них слишком мал, чтобы преодолеть сопротивление движению пера самописца по бумаге. Для регистрации потенциалов применяют либо самопишущие приборы с усилителями, либо самопишущие потенциометры.
Таким образом, нрименение рычажно-балансирного механизма обеспечивает выравнивание нагрузок между ветвями как в установившихся, так и в переходных режимах работы двухдвигательного синхронного привода. Этот механизм обладает малой инерционностью и достаточно высоким быстродействием. Широкий диапазон варьирования конструктивных параметров механизма делает возможным его применение в машинных агрегатах с различными динамическими характеристиками.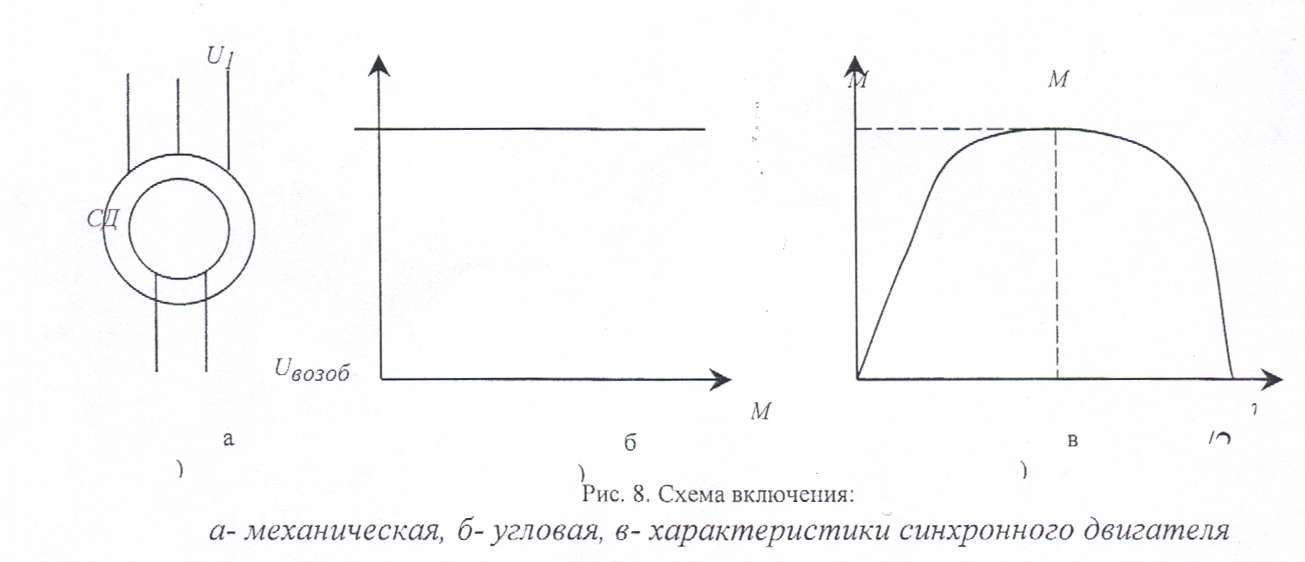 [c.110]
[c.110]
Если двигатель питается от сети бесконечной мощности и в цепи статора не происходит коммутаций, то при установившемся режиме, пренебрегая активным сопротивлением для трехфазно-го двигателя на основе уравнений (2.31), (2.32), можно получить статическую характеристику синхронного двигателя [104, 107] [c.29]
Статическую характеристику синхронного двигателя, таким образом, можно представить в виде [c.29]
Динамическая характеристика синхронного двигателя (2.34) является существенно нелинейной, что весьма затрудняет исследование динамических процессов в машинных агрегатах с такими двигателями. При малых рабочих углах (M максимальный момент двигателя по статической характеристике) можно использовать упрощенную линеаризованную динамическую характеристику в виде [104] [c.29]
Исследование динамических характеристик конструкций и моделей при искусственном возбуждении включает несколько этапов. В начале записываются амплитудно-частотные характеристики входных и переходных динамических податливостей в разных точках конструкции и определяются основные резонансные частоты. Возбуждение колебаний производится вибратором от генератора с плавным изменением частоты. При плавном изменении частоты возбуждения вибратора и автоматическом поддержании постоянной амплитуды силы, контролируемой пьезодатчиком, осуществляется последовательная синхронная запись амплитуды ускорения в различных точках конструкций. Пример такой записи показан на рис. 4 и 8. Время прохождения частотного диапазона от 0 до 2000 Гц составляет 1—3 мин.
[c.148]
В начале записываются амплитудно-частотные характеристики входных и переходных динамических податливостей в разных точках конструкции и определяются основные резонансные частоты. Возбуждение колебаний производится вибратором от генератора с плавным изменением частоты. При плавном изменении частоты возбуждения вибратора и автоматическом поддержании постоянной амплитуды силы, контролируемой пьезодатчиком, осуществляется последовательная синхронная запись амплитуды ускорения в различных точках конструкций. Пример такой записи показан на рис. 4 и 8. Время прохождения частотного диапазона от 0 до 2000 Гц составляет 1—3 мин.
[c.148]
Если измерения проводятся в условиях помехи, соизмеримой по уровню с возбуждаемым сигналом, то сигнал с акселерометра перед записью подается на узкополосный следящий фильтр. Схема измерений показана на рис. 65, где 1 — исследуемый объект 2 — датчик силы 3 — электродинамический вибратор 4 — акселерометр 5 — усилитель заряда 6 — усилитель мощности 7 — измерительная установка для автоматического узкополосного синхронного анализа 8 — следящий умножитель частоты 9 — фазовращатель 79, 15 — электронные осциллографы типа С1-55 и С1-1 11 — цифровой фазометр 12 — самописец 13 — генератор с плавным изменением частоты 14 — генератор с дискретным изменением частоты. Полученные характеристики служат для приближенного определения резонансных частот и пучностей соответствующих форм колебаний. Для более детальных измерений
[c.148]
Полученные характеристики служат для приближенного определения резонансных частот и пучностей соответствующих форм колебаний. Для более детальных измерений
[c.148]
В случае необходимости определения плавной частотной характеристики Z (Аш) наиболее целесообразно использовать двухканальный гетеродинный анализатор, построенный на базе анализаторов типа С53. Оба канала такого анализатора питаются от одного гетеродина, что обеспечивает полную синхронность анализа сигналов силы и скорости [120]. [c.436]
При проектировании транспортных роторов должны быть созданы системы и механизмы одинаковой пропускной способности, равной цикловой производительности, выбраны траектории и параметры законов движения деталей в интервале передачи, определены силовые характеристики захватных органов (пружин, вакуум-присосов, электромагнитов и т. п.), рассчитаны приводные механизмы для обеспечения синхронной передачи обрабатываемых деталей между соседними роторами.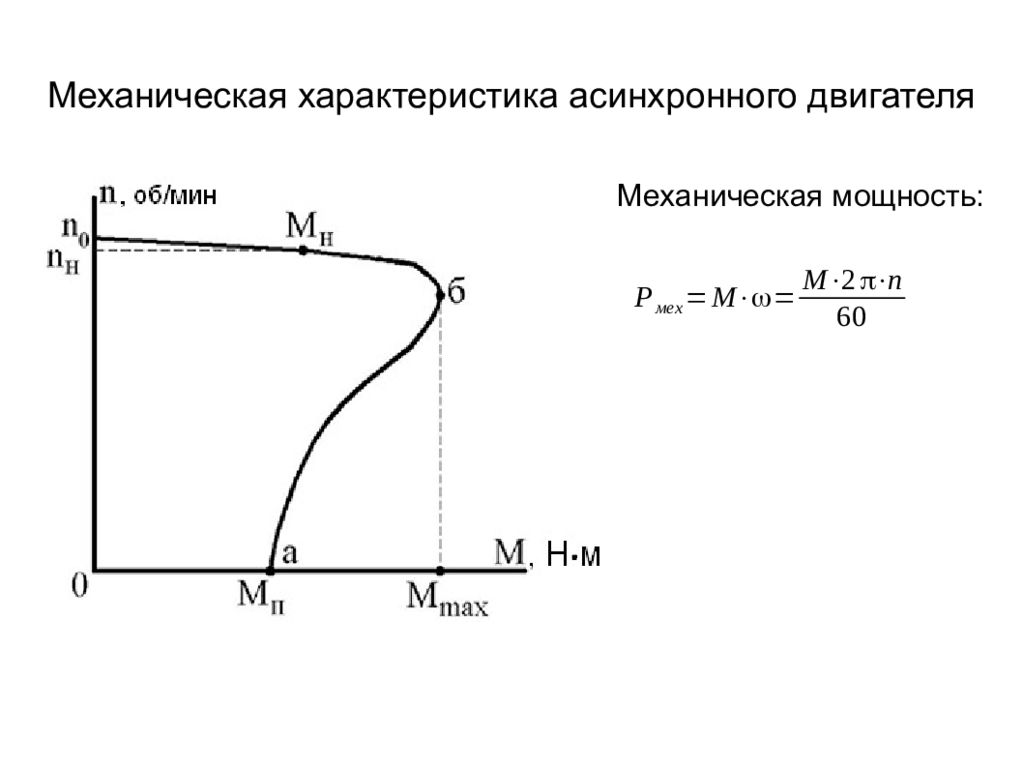 Линейная синхронизация соседних роторов по шагу выполняется с помощью мелкомодульных зубчатых муфт, устанавливаемых на главных валах каждого транспортного механизма.
[c.303]
Линейная синхронизация соседних роторов по шагу выполняется с помощью мелкомодульных зубчатых муфт, устанавливаемых на главных валах каждого транспортного механизма.
[c.303]
Червячно-винтовая передача необратима. Выходная жесткость передачи возрастает с увеличением передаточного отношения. Однако его увеличение влечет за собой повышение кинематических погрешностей (неравномерность скорости) и препятствует расширению диапазона регулирования скоростей движения активного захвата. Поэтому обычно диапазон регулирования скоростей в машинах с механическим возбуждением находится в пределах 3—4 порядков и в исключительных случаях достигает 5—6 порядков. Для расширения диапазонов регулирования непосредственно приводом используют следящие гидропередачи. Наилучшими регулировочными параметрами (идеально жесткая скоростная характеристика в пределах мощности) обладают синхронные следящие гидропередачи. [c.175]
Однако бывают случаи, когда силы зависят не только от положения, но еще и от скорости и времени или зависят только от скорости или от времени.
 Например, в электродвигателях (кроме синхронных машин переменного тока) развиваемый ими движущий момент зависит, как правило, от угловой скорости их ротора точно так же в центробежных насосах и вентиляторах потребляемый момент изменяется в квадратичной зависимости от угловой скорости (о механических характеристиках машин см. п. 27). В этих случаях теорема об изменении кинетической энергии не может свести задачу i интегрируемым дифференциальным уравнениям (так как работа сил не может быть определена без знания самого закона движения), поэтому задача определения движения машины должна в таких случаях строиться на решении дифференциального уравнения движения системы в обобщенных координатах, соответствующего обобщенным силам или обобщенным моментам, т. е. так называемого дифференциального уравнения Лагранжа 2-го рода. Для установления этого уравнения воспользуемся зависимостью (48). Из нее для бесконечно малого промежутка времени получим
[c.251]
Например, в электродвигателях (кроме синхронных машин переменного тока) развиваемый ими движущий момент зависит, как правило, от угловой скорости их ротора точно так же в центробежных насосах и вентиляторах потребляемый момент изменяется в квадратичной зависимости от угловой скорости (о механических характеристиках машин см. п. 27). В этих случаях теорема об изменении кинетической энергии не может свести задачу i интегрируемым дифференциальным уравнениям (так как работа сил не может быть определена без знания самого закона движения), поэтому задача определения движения машины должна в таких случаях строиться на решении дифференциального уравнения движения системы в обобщенных координатах, соответствующего обобщенным силам или обобщенным моментам, т. е. так называемого дифференциального уравнения Лагранжа 2-го рода. Для установления этого уравнения воспользуемся зависимостью (48). Из нее для бесконечно малого промежутка времени получим
[c.251]Применение синхронного детектирования для целей экстремального рягулироваиия сводятся к организации движения к экстремуму при наличия информации о производной dF/dU. Для этого достаточно скорость изменения аоложения управляемого параметра и сделать пропорциональной наклону характеристики объекта с обратным знаком, т.е, du dF
[c.126]
Для этого достаточно скорость изменения аоложения управляемого параметра и сделать пропорциональной наклону характеристики объекта с обратным знаком, т.е, du dF
[c.126]
В общем случае при неформальной постановке задача оптимизации ЭМУ включает в себя выбор онтималыюго типа об1 СКта (например, электрические машины постоянного тока с электромагнитным возбуждением и возбуждением от постоянных магнитов, асинхронные с короткозамкнутым и фазным ротором, синхронные и пр ), его конструктивной схемы (нормальное и обращенное, цилиндрическое и торцевое исполнение, способы охлаждения и передачи электрической энергии на вращающиеся части устройства, тин опор вращающихся частей и пр.), оптимизацию параметров объекта (геометрические размеры, обмоточные данные, характеристики электрических и магнитных материалов), а также поиск способов оптимального управления объектом (например, способов изменения напряжения и частоты питания) и, наконец, оптимизацию значений допусков па параметры. [c.143]
[c.143]
ТОТЫ вращения Л. Определение установившегося режима работы проводится при условии равенства электромагнитного момента и момента сопротивления При этом для синхронных машин необходимо строить угловую характеристику Л/э=/(0), где в — угол нагруэки. [c.238]
Дальнейи ее увеличение амплитуды внешнего воздействия приводит к уменьшению средней крутизны вольт-амперной характеристики, росту эффективного затухания в системе и, как следствие, к нарушению условий параметрического возбуждения. Это явление сходно с явлением тушения автоколебаний при синхронном и асинхронном воздействиях и приводит к существованию потолка для амплитуды внешнего воздействия при резонансе второго рода. [c.222]
Несмотря на внешнее сходство явления синхронизации в том-соновских автоколебательных системах без термистора и с термистором (ср. рис. 5.34 и 5.39), между этими системами и в режиме синхронизации, и вблизи области синхронизации имеется существенное различие. Томсоновский генератор без термистора принци-1тиально не может генерировать гармонические колебания в автономном, синхронном и промежуточном режимах из-за неизбежного захода колебаний в нелинейные области характеристики для снижения значения ее действующей крутизны 5 (х) до величины, обеспечивающей квазиконсервативность системы. В томсоновских генераторах с термисторами ограничение амплитуды колебаний происходит за счет термистора, а значение крутизны характеристики выбирается постоянным (So = onst), т. е. колебания в автономном, синхронном и промежуточном режимах не выходят за пределы линейного участка характеристики системы и в таких системах колебания при выходе на стационарный режим не обогащаются гармониками и комбинационными компонентами.
[c.224]
Томсоновский генератор без термистора принци-1тиально не может генерировать гармонические колебания в автономном, синхронном и промежуточном режимах из-за неизбежного захода колебаний в нелинейные области характеристики для снижения значения ее действующей крутизны 5 (х) до величины, обеспечивающей квазиконсервативность системы. В томсоновских генераторах с термисторами ограничение амплитуды колебаний происходит за счет термистора, а значение крутизны характеристики выбирается постоянным (So = onst), т. е. колебания в автономном, синхронном и промежуточном режимах не выходят за пределы линейного участка характеристики системы и в таких системах колебания при выходе на стационарный режим не обогащаются гармониками и комбинационными компонентами.
[c.224]
Крутящий момент материала ротора. При включении двигателя в сеть переменного тока создается вращающееся магнитное поле. Ротор вращается синхронно с магнитным полем с некоторым углом рассогласования. Крутящий момент идеального гистерезисного двигателя не зависит от частоты вращения ротора, а определяется только свойствами материала ротора (его объемом и величиной удельных потерь на гистерезис). Следовательно, необходимо иметь данные о величине удельных потерь на гистерезис в зависимости от индукции или напряженности поля при определенном характере перемагничивания. Поэтому основной характеристикой материала гистерезисных двигателей является PJHm, эта величина должна быть большой. Чем больше прямоугольность петли, тем больше потери на гистерезис. Поэтому другой характеристикой является коэффициент выпуклости кривой
[c.228]
Следовательно, необходимо иметь данные о величине удельных потерь на гистерезис в зависимости от индукции или напряженности поля при определенном характере перемагничивания. Поэтому основной характеристикой материала гистерезисных двигателей является PJHm, эта величина должна быть большой. Чем больше прямоугольность петли, тем больше потери на гистерезис. Поэтому другой характеристикой является коэффициент выпуклости кривой
[c.228]
Параметрами, определяемыми для выбора турбины, являются частота вращения в установившемся режиме п (об/мин), частота вращения при разгоне турбины Прзг (об/мин) и диаметр рабочего колеса Di (м). Для гидротурбин, работающих на ГЭС в СССР, частота вращения, называемая синхронной, должна удовлетворять условиям получения трехфазного тока частотой 50 Гц. Отсюда = [60/р = 30001р, где / = 50 Гц —число пар полюсов. Разгонная частота вращения возникает при аварии в системе регулирования и имеет наибольшее значение при Яотах и сбросе нагрузки с генератора.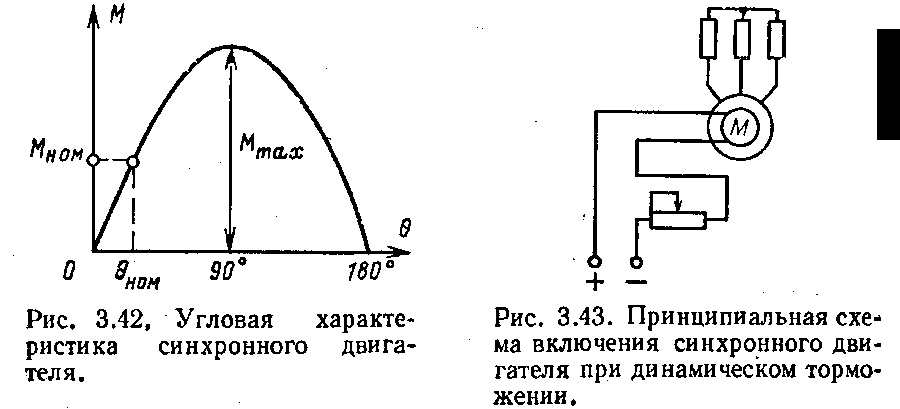 Она определяется По разгонной характеристике. Коэс ициент. разгона Крзг = увеличивается с увеличением быстроходности турбин.
[c.6]
Она определяется По разгонной характеристике. Коэс ициент. разгона Крзг = увеличивается с увеличением быстроходности турбин.
[c.6]
На рис. 299 показана механическая характеристика асинхронного электродвигателя трехфазного тока. Механическая характеристика Мд = -Мд( ) асинхронного электродвигателя состоит из двух частей первая — восходящая, неустойчивая — часть Оа расположена левее Мтах вторая — устойчивая — часть аЬ — правее. Часть аЬ — рабочая. При некотором значении угловой скорости со, соответствующей номинальному моменту М двигателя и номинальной скорости Шн двигатель развивает максимальную мощность. Угловую скорость СОс, при которой Мд = О, называют синхронной с этой скоростью ротор вращается при холостом ходе. Точка а диаграммы определяет положение максимального опрокидываюихего момента Мщах и минимально допустимой угловой скорости (Omin рабочей части характеристики, а точка О определяет начальный пусковой момент Mq при нулевой угловой скорости ротора. Условия работы электродвигателей при низких скоростях вращения значительно ухудшаются.
[c.205]
Условия работы электродвигателей при низких скоростях вращения значительно ухудшаются.
[c.205]
Коснемся еще одного вопроса. Для всякого ПЭ имеется своя ограниченная область осуш,ествимости процесса нревраш,ения энергии. Например, мощностная характеристика синхронного ЭД ограничена по скорости, превраш ение электрической энергии в механическую возможно только при постоянной частоте вращения. ДВС не может работать при частоте вращения ниже определенного уровня и имеет другие ограничения. На рис. 5.3 показана область превращения энергии для газотурбинного двигателя, где указаны предельные режимы i — по условию устойчивости [c.92]
Привнесенное в машиностроительную промышленность из ранее сформировавшихся смежных промышленных отраслей и примененное вначале для выполнения особо тяжелых и трудоемких подсобных работ, подъемно-транспортное оборудование вошло затем в основной комплекс производственных средств машиностроения наряду с технологическим и контрольно-измерительным оборудованием. Представленное ко времени становления этой отрасли тяжелой индустрии единичными конструкциями общего назначения, оно пополнялось в дальнейшем специализированными машинами и установками, постепенно вводившимися для обслуягивания межоперационной доставки и отдельных технологических процессов — на литейных участках, в окрасочных и сушильных камерах, в закалочных печах и пр. Исходные тенденции простого повышения силовых и скоростных характеристик независимо работающих механизмов прерывного действия позднее дополнялись в нем тенденциями совмещения раздельно выполнявшихся рабочих операций, перехода от применения только стационарных машин к применению более маневренных передвижных машин и, наконец, тенденциями преимущественного использования принципа непрерывности транспортного процесса. Когда же в ходе развития машиностроительной техники — но мере накопления элементов механизации и автоматизации в пределах еще обособленных цеховых участков и освоения массового поточного производства — на рубеже XIX и XX вв. все отчетливее стала определяться необходимость объединения технологических агрегатов в едином производственном потоке, именно подъемно-транспортное оборудование во многом способствовало формированию взаимосвязанной, синхронно действующей системы машин и устройств, войдя в эту систему автоматических линий, цехов и заводов как органически свойственное ей связующее звено. [c.171]
В практике исследования переходных процессов в машинах переменного тока используется эффективная замена реальной трехфазной машины эквивалентной ей по намагничивающим силам обмоток статора и ротора двухфазной машиной с синхронно вращающимися в пространстве ротором и статором. Обмотки ротора и статора, расположенные вдоль осей втлбранной координатной системы, могут вращаться с произвольной угловой скоростью а. При исследовании динамических процессов в машинных агрегатах с асинхронными двигателями, в частности при построении динамической характеристики двигателя, предпочтительной сравнительно с другими координатными системами является система х, у, О, вращающаяся от- [c.24]
Если предположить, что установившийся режим работы синхронного двигателя нарушен, например, резким изменением нагрузки на валу машинного агрегата, то в течение короткого времени после нарушения режима можно пренебречь влиянием демпферных обмоток и считать нотокосцепления цепи возбуждения постоянными. Пренебрегая, так же как и при получении статической характеристики (2.33), активным сопротивлением статора, можно получить динамическую характеристику синхронного двигателя [16, 107] [c.29]
Механизмы современных приводов при динамическом исследовании схематизируются в виде цепных, чаще всего, линеаризованных систем с некоторым числом звеньев, имеющих существенно нелинейные характеристики, что позволяет исследовать динамические характеристики таких приводов. Диссипативные свойства деформируемых звеньев представляются линеаризованными зависимостями, найденными на основе эквивалентной линеаризации действительного нелинейного закона рассеяния энергии [41 69 73]. Следуя указанной методики, диссипативные свойства звеньев самотор-моэящегося механизма будем учитывать линеаризованным коэффициентом сопротивления k,k+i, который изменяется синхронно с изменением режима, оставаясь постоянным в пределах данного режима [c.284]
Модели и натурные конструкции могут испытываться на амортизаторах или упругих связях. При этом связи желательно устанавливать в узлах исследуемых форм колебаний. Необходимо контролировать потоки энергии, проходящие через связи и амортизаторы в фундамент или прилегающие конструкции, особенно при измерении демпфирующей способности системы. Уходящую через связи энергию можно оценивать по работе сил, действующих в местах присоединения связей, для чего необходимо предварительно измерить динамическую жесткость присоединяемых конструкций в указанных точках. Измерение амплитудно-частотных характеристик и форм колебаний конструкций с малыми коэффициентами поглощения требует достаточно точного поддержания частоты возбуждения, что может осуществляться генераторами с цифровыми частотомерами. При изменении частоты на = 8/а /2/7с в окрестности резонансной частоты / амплитуда колебаний изменяется на 30% (см. 1.3). Чтобы поддерживать амплитуду колебаний с точностью +30%, частота не должна изменяться больше чем на 8/о /2/л. Измерение вибраций невращающихся деталей осуществляется с помощью пьезокерамических акселерометров с чувствительностью 0,02—1 B/g. Акселерометр ввинчивается в резьбовое отверстие в конструкции или приклеивается. В случае необходимости получить информацию о колебаниях конструкции в большом числе точек (например, при анализе форм) датчик последовательно приклеивается в этих точках пластилином. При исследованиях вибраций механизмов, когда необходимо получить синхронную информацию с нескольких десятков датчиков, сигналы записываются на магнитную ленту многоканального магнитографа. Датчики делятся на группы так, чтобы число датчиков в группе соответствовало числу каналов магнитографа, а один из датчиков, служащий опорным для измерения фазы между каналами, входит во все группы. [c.147]
Невозможность получения точных значений физикомеханических и геометрических параметров применяемых упругих тел и изменение этих параметров в процессе эксплуатации механизмов не позволяют в ряде случаев получить стабильные кинематические характеристики упомянутых механизмов и обеспечить синхронность их движения, что снижает точность предварительных кинематических расчетов. Однако наряду с этими недостатками такие механизмы обладают и рядом преимуществ, главными из которых являются простота конструкции, значительное редуцирующее действие, отсутствие зазоров и люфтов при трогапии с места и реверсировании, легкость бесступенчатой регулировки передаточного отношения, возможность работы до жесткого упора. Эти преимущества в ряде случаев играют решающую роль (как, например, в описанных выше механизмах верньерных устройств, предельных резьбовертах, схватах роботов и др.), и поэтому их использование в ряде машин и приборов оправдано. Следует отметить перспективность использования подобных механизмов в связи с появлением новых металлических, полимерных и металлополимерных материалов, обладающих высокими и стабильными параметрами упругости и износостойкости. Актуальными задачами являются конструктивные совершенствования описанных механизмов и пх испытания в условиях длительной эксплуатации. [c.162]
На механической характеристике асинхронного двигателя можно отметить четыре главные точки 1) точка, определяемая синхронной угловой скоростью (Ос, при которой момент двигателя равен нулю 2) точка, определяемая номинальной угловой скоростью О) и номинальным моментом 7W , соответствующим номинальной нагрузке двигателя 3) точка, определяемая максимальным моментом УИшах и минимально допустимой угловой 22 [c.22]
Полное решение задачи вибродиагностики может быть обеспечено лишь при наличии совершенных средств возбуждения, измерения и обработки информации. Выявлены типичные элементы, которые должны составлять основу модулей вибродиагностиче-ских комплексов. Стенд с автоматической контрольно-испытательной аппаратурой, на котором реализуется диагностика ПРС по изотропности жесткостных и диссипативных характеристик, включает в себя испытуемый объект с применением прецизионных приспособлений. Последний присоединяется к двум электродинамическим возбудителям, предварительно идентифицированным по механическим и электрическим параметрам. Колебания объекта возбуждаются от сканирующего генератора посредством блока управления. Механические колебания регистрируются виброприемниками обратной связи, которая замыкается посредством предварительных усилителей. В состав блока управления входит система синхронных следящих фильтров, реализующая быстрое аналоговое преобразование Фурье. [c.139]
Механические и энергетические характеристики синхронных двигателей
Синхронные трехфазные двигатели (СД) широко применяются в электроприводах самых разнообразных технологических машин. Схема включения СД приведена на рис. 2.21а, механические характеристики на рис. 2.21б.
Рис. 2.21. а) схема включения синхронного двигателя;
б) механические характеристики синхронного двигателя в режимах пуска и синхронного вращения.
Статор СД выполнен аналогично статору АД — три статорных обмотки расположены на статоре таким образом, что оси создаваемых ими потоков сдвинуты в пространстве на 1200. Подключение начал обмоток статора, которые на рис. 2.21а обозначены как С1, С2, С3, к трехфазной сети переменного тока со сдвигом напряжения между фазами на 120 электрических градусов приводит к появлению магнитного поля, вращающегося с синхронной скоростью ω0=2πf1/p. Здесь p – число пар полюсов статорных обмоток СД; f1 – частота питающей сети. При p=1 вращающееся поле представляет собой два диаметрально противоположно расположенных разноименных полюса северного (N) и южного (S), которые и вращаются со скоростью ω0.
Ротор СД выполняется с двумя обмотками: обмоткой возбуждения и короткозамкнутой пусковой обмоткой в виде «беличьей клетки». Обмотка возбуждения питается напряжением постоянного тока и при протекании в ней тока она превращается в электромагнит постоянного тока, разноименные полюса которого в зависимости от скорости вращения могут выполняться как явными, так и неявными, т.е. обмотка возбуждения распределяется по наружной поверхности ротора.
При неподвижном роторе разноименные полюса вращающегося поля статора и ротора не успевают притянуться. Вращающий момент двигателя равен нулю, а в обмотке возбуждения полем статора наводится столь большая э.д.с., что может наступить пробой изоляции обмотки возбуждения.
Для того, чтобы разноименные полюса статора и ротора притянулись (вошли в синхронизм) и при этом не появлялись существенно превышающие номинальные значения броски тока, ротор СД необходимо разогнать до подсинхронной скорости ωП, которая равна ωП=0,95ω0. Для этого предназначена пусковая короткозамкнутая обмотка, т.е. СД запускается как АД с короткозамкнутым ротором. Пусковые характеристики АД при различных вариантах пусковой обмотки приведены на рис. 2.21б
У характеристики 1 пусковой момент МП1 меньше пускового момента характеристики 2 — МП2, однако момент вхождения в синхронизм МВ1 больше МВ2. Выбор вида пусковой характеристики определяется конкретными условиями работы СД. Обмотка возбуждения СД при пуске закорачивается на разрядное сопротивление, что защищает ее изоляцию от перенапряжений. К источнику напряжения постоянного тока она подключается после того, как скорость ротора ω достигнет подсинхронной ωП.
Пусковая обмотка СД во время пуска интенсивно нагревается, поэтому время тока СД ограничено.
После вхождения СД в синхронизм его скорость при изменении величины момента сопротивления на валу до некоторого максимального значения Ммакс остается постоянной и равной скорости вращающегося магнитного поля – синхронной скорости ω0. Поэтому его механическая характеристика, приведенная на рис. 2.21б, имеет вид прямой, параллельной оси абсцисс. Если Мс превышает Ммакс, то СД может выпасть из синхронизма.
Для определения максимального момента СД Ммакс, до которого сохраняется синхронная работа СД, служит угловая характеристика СД. Она отражает зависимотсь вращающего момента М от внутреннего угла СД θ, представляющего собой угол сдвига между осью магнитного поля статора и осью поля ротора. Момент СД представляет собой синусоидальную функцию угла θ – М=Ммаксsinθ. Максимального значения вращающий момент СД достигает при θ=π/2. При больших значениях θ величина вращающего момента двигателя уменьшается и поэтому двигатель выпадает из синхронизма. Номинальному моменту двигателя Мном соответствует номинальный угол θном=250÷300. При таком значении θном коэффициент перегрузки СД по моменту кП=Ммакс/Мном=2÷2,5.
Синхронный двигатель может работать во всех режимах электрического торможения. Наиболее часто используется режим динамического торможения. Для его реализации обмотки статора СД отключают от сети и закорачивают на сопротивление динамического торможения RДТ, а обмотка возбуждения продолжает питаться постоянным током. Механические характеристики СД аналогичны характеристикам АД при динамическом торможении (см. рис. 2.20б).
Торможение противовключением используется редко из-за того, что перевод СД в этот режим сопровождается значительными бросками тока и требует применения сложных схем управления.
Работа системы электроснабжения характеризуется потреблением электроприемниками реактивной мощности. Это вызывает дополнительные потери энергии в элементах системы, снижение уровня напряжения и необходимость иметь повышенную пропускную способность подстанций и распределительных сетей, что снижает экономичность работы системы. В связи с этим для улучшения показателей работы системы электроснабжения необходимо производить компенсацию реактивной мощности, что может осуществляться несколькими способами.
Рис. 2.22. U-образные характеристики СД.
Один из эффективных способов компенсации реактивной мощности связан с использованием СД, который за счет регулирования тока возбуждения может осуществлять генерацию реактивной мощности в электрическую сеть. В этом случае СД работает с опережающим коэффициентом cos φ. Возможность работы СД в качестве компенсатора реактивной мощности иллюстрируют U-образные характеристики СД, приведенные на рис. 2.22. Эти характеристики показывают зависимости тока статора I1 и его cos φ от тока возбуждения IВ при U=const и Р=const.
Характеристики I1(IВ) показывают, что при увеличении от нуля тока возбуждения ток статора вначале уменьшается, что происходит за счет уменьшения его реактивной составляющей. При некотором токе возбуждения она становится равной нулю, а cos φ=1. При дальнейшем увеличении тока возбуждения вновь появляется и увеличивается реактивная составляющая тока статора, но уже с опережающей фазой. Синхронный двигатель начинает работать генератором реактивной энергии с отдачей ее в сеть.
Характеристики рис. 2.22 позволяют выявить также зависимость компенсирующей способности СД от мощности Р на его валу. Как видно из рис. 2.22 с ростом мощности Р область генерации реактивной мощности (опережающего cos φ) смещается в сторону больших токов возбуждения. Другими словами, при неизменном токе возбуждения с изменением мощности на валу отдаваемая в сеть реактивная мощность также меняется.
Из сказанного следует важный вывод: если СД работает с переменной нагрузкой на валу, то для полного использования его компенсирующих свойств требуется регулирование тока возбуждения.
Следует подчеркнуть, что при использования СД в качестве источника реактивной мощности необходимо обеспечивать повышенные токи возбуждения и увеличивать габаритную (полную) мощность СД, что не является ограничивающим фактором для такого применения СД. Покажем это следующим несложным расчетом.
Запишем отношение полной (габаритной) мощности S к активной мощности Р
.
Пусть требуется, чтобы реактивная опережающая мощность составляла 40% активной мощности, т.е. Q/P=0,4. Расчет выявляет, что при этом отношение S/Р составит 1,08, т.е. генерирование указанной реактивной мощности потребует увеличения габаритной мощности только на 8%. Это показывает, что использование СД для компенсации реактивной мощности является выгодным.
При использовании СД для компенсации реактивной мощности обычно требуется рассматривать в комплексе несколько вопросов. Одним из основных является технико-экономическое обоснование использования данного способа компенсации реактивной энергии. Как известно, кроме СД для этой цели могут использоваться также статические компенсирующие устройства (конденсаторы) и синхронные компенсаторы. Среди приемлемых вариантов экономически целесообразным будет тот, который обеспечивает минимум приведенных годовых затрат:
З=Кн,эК+Сэ=min,
где Кн,э – нормативный коэффициент эффективности капитальных вложений К; Сэ — эксплуатационные расходы.
Если в результате выполненных технико-экономических расчетов выявлена целесообразность использования СД для компенсации определенной реактивной мощности Q, то далее необходимо установить наиболее экономическое ее распределение между отдельными СД. Это достигается отысканием оптимального варианта возбуждения СД, участвующих в компенсации. Под оптимальным вариантом возбуждения СД обычно принимают такое распределение реактивной мощности Q между отдельными СД, при котором суммарные потери активной мощности, зависящие от выработки и распределения реактивной мощности, минимальны.
На практике распределение реактивной мощности между СД часто производят пропорционально либо их полной номинальной мощности Sном, либо пропорционально их активной мощности Рном.Этот принцип,как показывают расчеты, дает потери активной мощности, близкие к минимальному значению.
Токи возбуждения отдельных СД, компенсирующих заданную для них реактивную мощность, могут быть определены по кривым Q(IВ), снятым опытным путем.
Тема 5. Механические характеристики синхронного двигателя — КиберПедия
СД – это микродвигатели или двигатели средней и большой мощности.
Достоинства:
— скорость вращения равна
— при регулировании токов возбуждения возможны режимы работы как с потреблением, так и с генерацией реактивной мощности.
Недостатки:
— более сложная конструкция
— более высокая цена
no < 1500 об/мин
Способы пуска СД
- Асинхронный пуск
— прямой пуск
— автотрансформаторный пуск
— реакторный пуск
Обмотку статора подключают в сеть, обмотку возбуждения замыкают на добавочное сопротивление
Rп (5-10)Rов
Пусковые характеристики похожи на механические характеристики АД, иногда имеют провал на скорости, близкой к
Для уменьшения провала увеличивают пусковое сопротивление. Пусковые характеристики характеризуются 2 основными точками:
— пусковой момент;
— входной момент (он соответствует подсинхр скорости wпс=0,95w0)
В конце асинхронного пуска (при достижении wпс) пусковое сопротивление подключается и на обмотку возбуждения подается постоянное напряжение и двигатель втягивается в синхронизм.
- Частотный асинхронный пуск.
- Пуск в режиме вентиляции двигателя
- Косвенный пуск с использованием разгонного двигателя
Из-за конструкционной несимметричности принято анализировать режимы работы СД на основании схемы по продольной d и поперечной q осям.
Параметры с коэффициентом a – это индуктивное сопротивление контура намагничивания.
Параметры с коэффициентом к — это сопротивление демпферных или пусковых контуров.
Параметры с коэффициентом f – это сопротивление обмотки возбуждения.
При работе СД с нагрузкой между вектором напряжения и вектором Ef возникает фазовый сдвиг, называемый углом нагрузки σ. σ н ≈ (20-30)7
В соответствии с векторной диаграммой записывается уравнение механической (угловой) характеристики СД. Это выражение состоит из суммы синхронного и асинхронного моментов.
Перегрузочная способность СД (Мmax) в основном зависит от синхронного момента, что позволяет увеличить Мmax путем увеличения тока возбуждения Еf ≈If.
Если момент нагрузки превышает Мmax, то двигатель выходит из синхронизма.
Асинхронный режим СД с током обмотки возбуждения является аварийным режимом.
При работе в двигательном режиме и изменении тока возбуждения возможны режимы работы как с потреблением, так и с генерацией реактивной мощности.
Слева от кривой cos φ=1 двигатель недовозбужден и потребляет реактивную мощность; справа – перевозбужден и генерирует реактивную мощность в сеть.
Тормозные режимы СД
1. Торможение противовключением (путем изменения порядка чередования фаз).
2. Динамическое торможение.
Механические характеристики электроприводов по системе генератор-двигатель
Ег=кФгwг
При протекании Iя на зажимах генератора фиксируется напряжение Eг=Uя— Iя Rг
Уравнение электромеханической характеристики
Wд=
Изменяя поток возбуждения генератора (Ровг≈90,02-0,05)Рг) изменяем напряжение на якоре двигателя.
Регулирование производят в 2 зонах
Достоинства систем ГД:
1) — низкая мощность канала управления
2) — высокая надежность
3) — возможность плавного пуска и торможения
4) — широкий диапазон регулирования
Недостатки:
1) — большая установленная мощность оборудования
2) — низкий КПД всей установки
3) — снижение жесткости механических характеристик Δw= Δwяг≈2Δwд
4) — ограничения по регулированию токов возбуждения генератора: насыщение магнитной системы и самоход двигателя под действием остаточного возбуждения генератора.
Расчет и построение статических характеристик АД
PN [кВт] 55 кВт
nn [об/мин] 2946 об/мин
ŋn [%] 91%
cos φn = 0,92,
Задача по АД
Расчет и построение статистических характеристик АД
Начальные данные
Расчет недостающих параметров
1. u= =308,5с-1
c-1
no=
Если nu=1400, то nu=1500
2. Мu=
R1=0,057 Ом
R2=0,042 Ом
X1=0,2 Ом 3. =
X2=0,24 Ом 4. Мкрит. и Sкрит.
Sкрит. = Su( (2,5+ =0,083
-380/220
r wsp:rsidR=»00000000″><w:pgSz w:w=»12240″ w:h=»15840″/><w:pgMar w:top=»850″ w:right=»850″ w:bottom=»850″ w:left=»1417″ w:header=»708″ w:footer=»708″ w:gutter=»0″/><w:cols w:space=»720″/></w:sectPr></wx:sect></w:body></w:wordDocument>»> или
Sкрит=
Mкрит.=Мu = 445,7 H
Или
Мкрит.= = =435,9 Нм
5.
6.
Синхронный двигатель— обзор
Коэффициент мощности для переменного тока
Коэффициент мощности — это коэффициент, на который умножается кажущаяся мощность в кВА для получения фактической мощности, кВт, в системе переменного тока. Это отношение синфазной составляющей линейного тока к общему току [39].
В асинхронных двигателях намагничивающая составляющая тока всегда отстает на 90 °. Следовательно, линейный ток отстает при всех нагрузках; величина зависит от нагрузки тока намагничивания.
В синхронных двигателях возбуждение обеспечивается отдельным источником постоянного тока, либо в виде отдельной мотор-генераторной установки (M-G), либо в виде возбудителя, установленного непосредственно на валу двигателя. Ток можно заставить опережать в разной степени, изменяя величину напряженности поля. Коэффициент мощности двигателей может быть отстающим, единичным или опережающим. При использовании переменного тока потребляемая мощность, называемая активной или фактической мощностью , считается энергией, используемой резистивной нагрузкой [40].Синхронный двигатель обеспечивает единицу или опережающий фактор, а асинхронный двигатель обеспечивает единицу или запаздывающий фактор.
Применяя надлежащую величину возбуждения постоянного тока к полюсам возбуждения синхронного двигателя, он работает с единичным коэффициентом мощности. Синхронные двигатели с коэффициентом мощности Unity предназначены для работы именно таким образом. Полная нагрузка, с возбуждением, они не требуют от линии отставания реактивной кВА, а также не подают в линию опережающую реактивную кВА; они работают с единичным коэффициентом мощности с минимальным током статора и, следовательно, с самым высоким КПД [15].
Проконсультируйтесь с квалифицированным инженером-электриком о типах двигателей, предлагаемых для технологической установки; такая оценка сочетания синхронных и асинхронных двигателей поможет определить новый коэффициент мощности для установки, потому что чистый коэффициент запаздывания для станций означает, что вся мощность для этой установки будет стоить больше, чем если бы коэффициент был единицей или опережающим. Из Brown and Cadick [40]:
Полная мощность = EI, или ВА, или кВА
Активная мощность = EICosθ, или Вт, или кВт
Примечание: θ = угол вектора тока между полной и активной мощностью на векторной диаграмме
Реактивная мощность = EISinθ, или VAR, или kVAR
Расчетный коэффициент мощности:
F p = активная мощность / полная мощность
F p = EICosθ / (EI) = cosθ
F p = W / (ВАр) = (кВт) / (кВАр)
Обратите внимание, что реактивная мощность требует от энергосистемы, но не дает никакой полезной работы.
(20-13) Номинальная мощность двигателяVA = (л.с.) (0,746) (Eff) (powerfactor)
Плата за электроэнергию основана на потребляемой мощности в кВАр; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление. См. Полезные обсуждения этого предмета в Планкенхорне [41], Валода [42] и Лазаре [43]. Плата за электроэнергию зависит от требований VAR; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление.
На большинстве технологических предприятий необходимо соблюдать осторожность, чтобы поддерживать подходящий коэффициент мощности для своей системы, в противном случае может быть наложен штраф на затраты на электроэнергию.Если коэффициент мощности падает ниже некоторого установленного значения, например 0,8, затраты на электроэнергию увеличиваются, потому что фактическая мощность (в виде тока), необходимая для работы (лошадиные силы), значительно меньше, чем общая мощность, подаваемая в систему установки. Разница в том, что он попадает в поле намагничивания (реактивный ток), что не соответствует реальной работе. Добавляя синхронные двигатели или конденсаторы к системе с полностью индуктивной нагрузкой, вы можете поднять коэффициент мощности с запаздывающего состояния до единицы (или почти до единицы). Синхронные двигатели могут быть спроектированы так, чтобы обеспечивать переменные величины опережающего коэффициента мощности.Это исследование или баланс, который необходимо учитывать при проектировании станции, а рекомендации должны быть подготовлены компетентными инженерами-электриками.
Обычно коэффициент мощности синхронного двигателя равен единице (1,0) или 0,8. Значения опережения 0,7 или 0,6 дадут большую коррекцию опережения для другой запаздывающей системы.
Рисунок 20-13 иллюстрирует работу с коэффициентом мощности для различных типов оборудования.
Рисунок 20-13. Коэффициент мощности различных устройств и то, как синхронные двигатели улучшают коэффициент мощности.
(Используется с разрешения: EM Synchronizer, 200-SYN-42, © 1955. Dresser-Rand Company.)Асинхронный двигатель обычно требует от 0,3 до 0,6 реактивного намагничивания кВА на л.с. или рабочую нагрузку, но опережающую мощность 0,8 Синхронный двигатель с коэффициентом усиления будет обеспечивать мощностью корректирующего намагничивания 0,4–0,6 кВА на л.с. в зависимости от переносимой механической нагрузки. Таким образом, равные подключенные л.с. в асинхронных двигателях и синхронных двигателях с опережающим коэффициентом мощности 0,8 дадут коэффициент мощности системы приблизительно равный единице [39].
(20-14) реактивная, кВА = (totalalkVA) 2- (кВт) 2
Это всегда отстает для асинхронного двигателя. Для синхронного двигателя с коэффициентом мощности (PF) = 1,0 кВА и кВт равны, а для любого коэффициента мощности меньше 1,0, то есть 0,9, 0,8, 0,7 и т. Д., Коэффициент мощности является опережающим. Также см. Ссылки [44–46].
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора.Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Encyclopædia Britannica, Inc.Основы работы асинхронного двигателя могут быть разработаны, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора.На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке ток в фазе a является максимально положительным, а в фазах b и c — вдвое отрицательным. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу.В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе значение равно половине. положительный. Результат, как показано на рисунке для t 2 , снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников.Поскольку проводники ротора закорочены вместе на каждом конце, в результате в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. На этом рисунке показана диаграмма токов ротора за мгновение t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Encyclopædia Britannica, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке является суммой синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электрической мощности. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Крутящий момент— Механическая характеристика синхронного генератора
Синхронный генератор может работать в некотором диапазоне скоростей. Характеристика крутящего момента будет вертикальной линией на ведомой скорости. Максимальный непрерывный крутящий момент может несколько измениться в зависимости от ограничений по напряжению и мощности. Контроль возбуждения должен быть спроектирован с учетом желаемого диапазона скоростей.
Обычно при изучении основ генератора концентрируется на работе с фиксированной частотой.При изучении генераторов для использования с ветряными турбинами учитываются частотно-регулируемые характеристики.
Re: В комментариях добавлены дополнительные вопросы:
Основы подключения двух источников переменного тока к одной сети должны объяснить, почему они должны быть синхронизированы требуемым образом. В текстах есть разделы, посвященные подключению синхронного генератора к бесконечной шине и подключению двух генераторов друг к другу. Приведены векторные диаграммы, схемы замещения и примеры расчетов.В материале объясняется, что необходимо сделать, чтобы генераторы работали только с номинальными параметрами. Может быть не так много материалов, которые подробно изучают, что произойдет внутри генератора, если будет предпринята попытка работы за пределами номинальных параметров. Возможно, по этой теме были написаны некоторые технические статьи. Ученый Google может что-то найти.
Цитата из технической статьи:
Когда автономный генератор находится под напряжением при включении редуктора или выбеге до остановки, он ведет себя как асинхронный двигатель и может быть поврежден в течение нескольких секунд.Во время трехфазного питания в состоянии покоя в роторе генератора индуцируется вращающийся поток с синхронной частотой. Результирующий ток ротора направляется по путям в корпусе ротора, аналогичным путям тока ротора для токов статора обратной последовательности при однофазной работе генератора. Произойдет быстрый нагрев ротора и его повреждение. Импеданс машины в течение этого интервала высокого скольжения эквивалентен реактивному сопротивлению обратной последовательности генератора.
К. Дж. Мозина, «Уроки, извлеченные из событий отключения генераторов на промышленных объектах», , 2008 г., 55-я техническая конференция нефтегазовой и химической промышленности IEEE, , Цинциннати, Огайо, 2008 г., стр.1-8.
Синхронные двигатели, основные характеристики и их применение
Электродвигатель в целом представляет собой электромеханическое устройство, которое преобразует энергию из электрической области в механическую. Синхронный электродвигатель представляет собой двигатель переменного тока, в котором в установившемся состоянии [1] вращение вала синхронизировано с частотой питающего тока; период вращения в точности равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, которое вращается во времени с колебаниями сетевого тока.Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и, как следствие, обеспечивает второе синхронизированное вращающееся магнитное поле любого двигателя переменного тока. Синхронный двигатель называется с двойным питанием , если он снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре. В зависимости от типа входа мы классифицировали его на однофазные и трехфазные двигатели. Синхронные двигатели более широко используются в промышленных
Основные характеристики:
Некоторые из основных характеристик синхронного двигателя следующие: —
1. Синхронные двигатели по своей природе не запускаются автоматически.
2. Им требуются некоторые внешние средства для приведения их скорости, близкой к синхронной, до того, как они будут синхронизированы.
3. Скорость работы в синхронизме с частотой питающей сети.
4. При постоянной частоте питания они ведут себя как двигатель с постоянной скоростью независимо от условий нагрузки.
5. Этот двигатель обладает уникальными характеристиками, позволяющими работать при любом коэффициенте электрической мощности.Это позволяет использовать его в электричестве для улучшения коэффициента мощности.
Применение синхронных двигателей:1. Поскольку синхронный двигатель может работать как с опережающим, так и с запаздывающим коэффициентом мощности, его можно использовать для улучшения коэффициента мощности. Синхронный двигатель на холостом ходу имеет опережающий коэффициент мощности. Он используется в энергосистеме вместо статических конденсаторов.
2. Синхронный двигатель используется там, где требуется высокая мощность при низкой скорости.Такие как прокатные станы, измельчители, смесители, насосы, насосы, компрессоры и т. Д.
Что такое синхронный двигатель? — Определение, конструкция, работа и ее особенности
Определение: Двигатель, работающий с синхронной скоростью, известен как синхронный двигатель. Синхронная скорость — это постоянная скорость, при которой двигатель создает электродвижущую силу . Синхронный двигатель используется для преобразования электрической энергии в механическую.
Конструкция синхронного двигателя
Статор и ротор — две основные части синхронного двигателя.Статор становится неподвижным и несет на себе обмотку якоря двигателя. Обмотка якоря является основной обмоткой, из-за которой в двигателе индуцируется ЭДС . Вращатель несет обмотки возбуждения. В роторе наводится основной поток поля. Ротор имеет две конструкции: ротор с явнополюсным ротором и ротор с явнополюсным ротором.
Синхронный двигатель использует явнополюсный ротор. Слово выступ означает, что полюса ротора выступают в сторону обмоток якоря .Ротор синхронного двигателя выполнен из листовой стали. Пластины уменьшают потери на вихревые токи, возникающие в обмотке трансформатора. Ротор с явнополюсным ротором в основном используется для создания средне- и тихоходных двигателей. Для получения в двигателе используется высокоскоростной цилиндрический ротор.
Работающий синхронный двигатель
Статор и ротор — две основные части синхронного двигателя. Статор — это неподвижная часть, а ротор — это вращающаяся часть машины.На статор двигателя подается трехфазный переменный ток.
Статор и ротор возбуждаются отдельно. Возбуждение — это процесс создания магнитного поля на частях двигателя с помощью электрического тока.
Когда на статор подается трехфазное питание, между статором и зазором ротора возникает вращающееся магнитное поле. Поле с подвижной полярностью известно как вращающееся магнитное поле. Вращающееся магнитное поле возникает только в многофазной системе.Из-за вращающегося магнитного поля на статоре развиваются северный и южный полюса.
Ротор возбуждается источником постоянного тока. Источник постоянного тока индуцирует северный и южный полюса ротора. Поскольку питание постоянного тока остается постоянным, магнитный поток на роторе остается неизменным. Таким образом, поток имеет фиксированную полярность. Северный полюс развивается на одном конце ротора, а южный — на другом.
Переменный ток синусоидальный. Полярность волны меняется каждые полупериод, т.е.е. волна остается положительной в первой половине цикла и становится отрицательной во второй половине цикла. Положительный и отрицательный полупериод волны развивает северный и южный полюса статора соответственно.
Когда ротор и статор имеют одинаковые полюса на одной стороне, они отталкиваются друг от друга. Если у них противоположные полюса, они притягиваются друг к другу. Это легко понять с помощью рисунка, показанного ниже: Ротор притягивается к полюсу статора в течение первого полупериода питания и отталкивается во втором полуцикле.Таким образом, ротор начинает пульсировать только в одном месте. Это причина, по которой синхронный двигатель не запускается автоматически.
Первичный двигатель используется для вращения двигателя. Первичный двигатель вращает ротор с синхронной скоростью. Синхронная скорость — это постоянная скорость машины, значение которой зависит от частоты и числа полюсов машины.
Когда ротор начинает вращаться с синхронной скоростью, первичный двигатель отключается от двигателя.И питание постоянного тока подается на ротор, из-за чего северный и южный полюс развиваются на их концах
Северный и южный полюса ротора и статора взаимно блокируются. Таким образом, ротор начинает вращаться со скоростью вращающегося магнитного поля. И двигатель работает с синхронной скоростью. Скорость двигателя можно изменить только путем изменения частоты источника питания.
Основные характеристики синхронного двигателя
- Скорость синхронного двигателя не зависит от нагрузки, т.е.е. изменение нагрузки не влияет на скорость двигателя.
- Синхронный двигатель не запускается автоматически. Первичный двигатель используется для вращения двигателя с синхронной скоростью.
- Синхронный двигатель работает как с опережающим, так и с запаздывающим коэффициентом мощности.
Синхронный двигатель также может запускаться с помощью демпферных обмоток.
Модель динамики упрощенная трехфазная синхронная станок
Модель динамики упрощенного трехфазного синхронного machine
Library
Simscape / Electrical / Specialized Power Systems / Electric Machines
Описание
Блок Simplified Synchronous Machine моделирует как электрические, так и механические характеристики простой синхронной машины.
Электрическая система для каждой фазы состоит из источника напряжения последовательно с импедансом RL, который реализует внутренний импеданс машины. Значение R может быть нулевым, но значение L должно быть положительным.
Блок Simplified Synchronous Machine реализует механическую систему описывается формулой
Δω (t) = 12H∫0t (Tm − Te) −KdΔω (t) dtω (t) = Δω (t) + ω0,
, где
Δ ω = изменение скорости
по скорости работы
H =
постоянная инерции
Tm = механическая
крутящий момент
Te = электромагнитный крутящий момент
Kd = коэффициент демпфирования, представляющий
влияние демпферных обмоток
ω ( т )
= механическая частота вращения ротора
ω 0 =
скорость работы (1 шт.ед.)
Хотя параметры можно вводить в единицах СИ или на единицу в диалоговом окне, внутренние расчеты выполняются в за единицу. На следующей блок-схеме показано, как механический часть модели реализована. Модель вычисляет отклонение с относительно скорости работы; не сама абсолютная скорость.
Коэффициент демпфирования Kd имитирует влияние демпферных обмоток обычно используется в синхронных машинах. Когда машина подключена к бесконечной сети (нулевой импеданс), вариация машины дельта угла мощности (δ) в результате изменения механической мощность ( P м ) может быть приблизительной следующей передаточной функцией второго порядка:
δPm = ωs / (2H) s2 + 2ζωns + ωn2,
где
δ | Дельта угла мощности: угол внутреннего напряжения E с относительно напряжения на зажимах, в радианах | |||||||||||||||||||||||||
P м | Механическая мощность в о.у. | |||||||||||||||||||||||||
ω n | Частота электромеханических колебаний = 2 рад / с | |||||||||||||||||||||||||
ζ | Коэффициент демпфирования = (Kd / 4) 2 / (ωsHPmax) | |||||||||||||||||||||||||
ω s | 9355 | Электрическая частота в рад | ||||||||||||||||||||||||
P max | Максимальная мощность в о.е., передаваемая через реактивное сопротивление X при напряжение на зажимах В т и внутреннее напряжение E . P макс = В т E / X , где В т , E , и X находятся в о.у. | |||||||||||||||||||||||||
H | Константа инерции (с) | |||||||||||||||||||||||||
K d | Фактор демпфирования 4 Эта приближенная передаточная функция, которая была получена предполагая sin (δ) = δ, справедливо для малых углов мощности (δ<30 градусов).Из предыдущего ζ выражения следует что значение Kd, необходимое для получения заданного коэффициента затухания ζ:ПараметрыВ библиотеке Machines вы можете выбрать между единицами SI или единицами pu Упрощенный Блоки синхронной машины для определения электрических и механических параметров модель. Эти два блока моделируют одну и ту же упрощенную модель синхронной машины; единственная разница заключается в том, как вы вводите единицы измерения параметров. Вкладка конфигурации
Вкладка параметров
Вкладка AdvancedЧтобы включить вкладку Advanced, установите параметр Simulation type of блок powergui на Discrete и на Вкладка настроек , очистить Автоматически обрабатывать дискретные решатель и расширенная вкладка решателя настройки блоков параметр.
Вкладка «Поток нагрузки»Параметры потока нагрузки определяют параметры блока для использования с инструментом «Поток нагрузки» Блок Powergui. Эти параметры потока нагрузки предназначены для инициализации модели. Только. Они не влияют на блочную модель или производительность моделирования. Конфигурация вкладки Load Flow зависит от опции, выбранной для параметра Тип генератора .
Входы и выходы
ДопущенияЭлектрическая система блока Simplified Synchronous Machine состоит из исключительно из источника напряжения за синхронными реактивным сопротивлением и сопротивлением.Все остальные при этом не учитываются индуктивности намагничивания якоря, возбуждения и демпфирующей обмотки. В влияние демпферных обмоток приблизительно выражается коэффициентом демпфирования Kd. Три источника напряжения ветви импеданса RL соединены по схеме Y (три или четыре провода). Нагрузка может или могла не быть сбалансированным. ОграниченияПри использовании блоков Simplified Synchronous Machine в дискретных системах вы возможно, придется использовать небольшую паразитную резистивную нагрузку, подключенную к клеммам машины, чтобы избегать числовых колебаний.Большое время выборки требует больших нагрузок. Минимальное резистивное нагрузка пропорциональна времени выборки. Помните, что с шагом 25 мкс на частоте 60 Гц В системе минимальная нагрузка составляет примерно 2,5% от номинальной мощности машины. Например, Упрощенная синхронная машина мощностью 200 МВА в энергосистеме с дискретизацией времени выборки 50 мкс требует примерно 5% резистивной нагрузки или 10 МВт. Если время выборки уменьшить до 20 мкс, резистивной нагрузки 4 МВт должно быть достаточно. Примеры The Поток нагрузки Опция Powergui использовался для инициализации машины для запуска моделирования. в установившемся режиме с машиной мощностью 500 МВт. Требуемый внутренний напряжение, рассчитанное по потоку нагрузки, составляет 1,0149 о.е. Следовательно, внутренний напряжение E = 315e3 * 1.0149 = 319 690 В, фаза-фаза задана в блоке Constant, подключенном к входу E. Максимальная мощность который может поставляться машиной с напряжением на зажимах V t = 1,0 о.е. и внутреннее напряжение E = 1,0149 о.е. составляет P max = V т * E / X = 1,0149 / 0,2 = 5,0745 о.е. Коэффициент демпфирования Kd регулируется для получения коэффициента демпфирования. ζ = 0,3. Требуемое значение Kd: Два блока Фурье измеряют угол мощности δ. Этот угол вычисляется как разница между фазовым углом внутреннего напряжения фазы A и фазовым углом фазы A напряжение на клеммах. В этом примере шаг выполняется на механической мощности применяется к валу. Машина изначально работает в установившемся режиме. с механической мощностью 505 МВт (механическая мощность, необходимая для выходная электрическая мощность 500 МВт с учетом резистивных потерь). При t = 0,5 с механическая мощность внезапно увеличивается до 1000 МВт. Запустите пример и проследите за электромеханическим переходным процессом. на блоке Scope, отображающем угол поворота δ в градусах, скорость машины в об / мин и электрическая мощность в МВт. При начальной электрической мощности Pe = 500 МВт (0,5 о.е.) нагрузка угол δ составляет 5,65 градуса, что соответствует ожидаемому значению: Pe = VtEsinδX = 1,0⋅1,0149⋅sin (5,65∘) 0,2 = 0,5 о.е. При изменении механической мощности от 0,5 до 1,0 о.е. угол нагрузки увеличивается и проходит серию недогашенных колебаний (коэффициент демпфирования ζ = 0,3) перед стабилизацией до нового значения 11,3 градуса. Частота колебаний определяется выражением: fn = 12πωsPmax2H = 2.84 Гц. Представлен до R2006a Синхронный двигательЗАДАЧИ • перечислить основные части конструкции синхронного двигателя. • определить и описать обмотку амортизатора. • описывает основные операции синхронного двигателя. • описать, как коэффициент мощности синхронного двигателя зависит от недовозбужденное постоянное поле, нормально возбужденное постоянное поле и перевозбужденное поле постоянного тока. • перечислите не менее трех промышленных применений синхронного двигателя. Синхронный двигатель fgr 1 — это трехфазный двигатель переменного тока, который работает на постоянной скорости от состояния холостого хода до полной нагрузки. Этот тип двигатель имеет вращающееся поле, которое возбуждается отдельно от постоянного тока. источник. В этом отношении он похож на трехфазный генератор переменного тока.Если возбуждение де-поля изменяется, коэффициент мощности синхронного двигателя может варьироваться в широком диапазоне запаздывающих и опережающих значений. Синхронный двигатель используется во многих промышленных приложениях, потому что его фиксированной скоростной характеристики в диапазоне от холостого хода до полной нагрузки. Этот тип двигателя также используется для корректировки или улучшения коэффициента мощности. промышленных цепей трехфазного переменного тока, тем самым снижая эксплуатационные расходы. КОНСТРУКТИВНЫЕ ДЕТАЛИ Трехфазный синхронный двигатель в основном состоит из сердечника статора с трехфазная обмотка (похожая на асинхронный двигатель) вращающееся поле постоянного тока со вспомогательной или амортизационной обмоткой и контактными кольцами, щетками и щеткой держатели и два торцевых щита, в которых размещены подшипники, поддерживающие ротор. вал.Обмотка амортизатора (fgr 2) состоит из встроенных медных стержней. в стержнях полюсов. Медные стержни этого особого типа «беличья клетка». обмотка »приварены к концевым кольцам с каждой стороны ротора. Обмотка статора и сердечник синхронного двигателя аналогичны. к характеристикам трехфазного асинхронного двигателя с короткозамкнутым ротором и ротора с фазным ротором. Индукционный двигатель. Выводы обмотки статора имеют маркировку T1, T2 и T3 и заканчиваются в выпускной коробке, установленной на боковой стороне корпуса двигателя. Ротор синхронного двигателя имеет явные полюса поля. Поле катушки соединены последовательно для чередования полярностей. Количество ротора Количество полюсов поля должно равняться количеству полюсов поля статора. Полевая схема выводы выведены к двум контактным кольцам, установленным на валу ротора для щеточные двигатели. Угольные щетки, установленные в щеткодержателях, контактируют с двумя контактными кольцами.Клеммы полевой цепи подведены из щеткодержателей во вторую клеммную коробку, установленную на раме мотора. Выводы для цепи возбуждения имеют маркировку F и F — короткозамкнутый элемент, или амортизатор, обмотка предусмотрена для запуска, так как синхронный без этой функции двигатель не запускается автоматически. Ротор, изображенный на 2 имеет выступающие полюса и обмотку амортизатора. На синхронном двигателе предусмотрены два торцевых щита. Один из торцевых щитов больше, чем второй экран, потому что в нем находится щеткодержатель постоянного тока монтажные и контактные кольца.Подшипники скольжения или шарикоподшипники используется для поддержки вала ротора. Подшипники также размещаются в конце щитки мотора. ПРИНЦИП ДЕЙСТВИЯ Когда на обмотки статора подается номинальное трехфазное напряжение, создается вращающееся магнитное поле. Это поле движется синхронно скорость. Как указано в предыдущих разделах, синхронная скорость магнитного поле зависит от частоты трехфазного напряжения и количества полюсов статора.Следующая формула используется для определения синхронного скорость. Синхронная скорость = (120 x частота) / количество полюсов S = (120xf) / п Магнитное поле, создаваемое обмотками статора, распространяется на синхронная скорость и разрезает короткозамкнутую обмотку ротора. И напряжение, и ток индуцируются в стержнях обмотки ротора. Результирующее магнитное поле обмотки амортизатора (беличьей клетки) реагирует с полем статора, создавая крутящий момент, который заставляет ротор повернуть. Скорость вращения ротора увеличится до точки немного ниже синхронная скорость статора, от 92 до 97 процентов от номинальная скорость двигателя. Есть небольшое скольжение скорости ротора от скорости магнитного поля, создаваемого статором. Другими словами, двигатель запускается как асинхронный двигатель с короткозамкнутым ротором. Цепь возбуждения теперь подключена к источнику постоянного тока и закреплена. магнитные полюса устанавливаются в сердечниках поля ротора.Магнитные полюса ротора притягиваются к разным магнитным полюсам магнитного поля настраивается статором. иллюстрации 20-3 и 20-4 показывают, как полюса поля ротора блокируются с непохожими друг на друга полюса поля статора. Как только полюса поля заблокированы, скорость ротора становится такой же, как и скорость магнитного поля, создаваемого статором обмотки. Другими словами, частота вращения ротора теперь равна синхронной. скорость. Помните, что синхронный двигатель всегда должен запускаться как трехфазный, асинхронный двигатель с короткозамкнутым ротором с отключенным возбуждением постоянного поля.Схема поля постоянного тока добавляется только после того, как ротор разгонится до значения около синхронной скорости. Тогда двигатель будет работать как синхронный. двигатель, синхронизированный с полем вращения статора. Если предпринята попытка запустить трехфазный синхронный двигатель сначала включение цепи постоянного тока, а затем применение трехфазного напряжения к обмоткам статора двигатель не запустится, так как чистый крутящий момент ноль, в момент подачи трехфазного напряжения на обмотки статора, магнитное поле, создаваемое током статора, поворачивается в синхронном скорость.Ротор с его магнитными полюсами фиксированной полярности притягивается сначала с помощью непохожего полюса статора и пытается повернуться в этом направлении. Однако, прежде чем ротор сможет повернуться, другой полюс статора противоположной полярности перемещается в положение, и ротор затем пытается повернуться в противоположном направлении. направление. Из-за этого действия чередующихся полюсов чистый крутящий момент равен нулю, и двигатель не запускается. Возбуждение поля постоянным током В ранних моделях цепь возбуждения возбуждалась внешним постоянным током. источник. Генератор постоянного тока может быть соединен с валом двигателя для питания постоянный ток возбуждения. илл. 5 показаны соединения для синхронного двигателя. Полевой реостат в отдельно возбуждаемой цепи поля изменяется ток в поле схема.Изменения тока поля влияют на силу магнитного поля. поле, развиваемое вращающимся ротором. Вариации напряженности поля ротора не влияют на двигатель, который продолжает работать с постоянной скоростью. Однако изменения в возбуждении постоянного поля действительно изменяют коэффициент мощности. синхронного двигателя. Бесщеточное твердотельное возбуждение Усовершенствованием возбуждения синхронного двигателя является разработка бесщеточный возбудитель постоянного тока.Коммутатор обычного прямого подключения Возбудитель заменен на трехфазный твердотельный выпрямитель мостового типа. Затем выход постоянного тока подается непосредственно на обмотку возбуждения двигателя. Упрощенный схема показана на рисунке 6. Кольцо стационарного поля для возбудителя переменного тока. получает постоянный ток от небольшого выпрямителя в шкафу управления двигателем. Этот выпрямитель питается от источника переменного тока. Постоянное поле возбудителя также регулируется. Твердотельные диоды выпрямителя изменяют выход переменного тока возбудителя на постоянный.Этот DC является источником возбуждения полюсов поля ротора. Кремний-контролируемый выпрямители, активируемые полупроводниковой цепью управления полем, заменить электромеханические реле и контакторы классического щеточного типа синхронный двигатель. Резистор полевого разряда вставляется во время пуска двигателя. У мотора синхронизируя скорость втягивания, цепь разряда поля автоматически разомкнут, и на обмотки полюса возбуждения подается постоянное возбуждение.Возбуждение автоматически удаляется, если двигатель работает не в такт (синхронизация) из-за перегрузки или пропадания напряжения. Бесщеточный ротор показан на рис. 7. На валу ротора установлен якорь возбудителя переменного тока, выход переменного тока выпрямляется в постоянный ток кремниевыми диодами. Эта система устраняет проблемы с щеткой и коммутатором. (Статор бесщеточный двигатель аналогичен двигателю щеточного типа.) Коэффициент мощности Низкий коэффициент мощности при уменьшении тока возбуждения ниже нормы, вставив все сопротивление реостата в полевая схема. Трехфазная цепь переменного тока к статору обеспечивает некоторое намагничивание. ток, который помогает усилить слабое поле постоянного тока. Этот намагничивающий компонент тока отстает от напряжения на 90 электрических градусов. Поскольку намагничивание составляющая тока становится большой частью общего входного тока, результаты с низким запаздывающим коэффициентом мощности. Если усилить слабое поле постоянного тока, коэффициент мощности улучшится. Как результат, трехфазная цепь переменного тока к статору подает меньший ток намагничивания. Намагничивающая составляющая тока становится меньшей частью общей ток вводится в обмотку статора, и коэффициент мощности увеличивается. Если напряженность поля увеличивается в достаточной степени, коэффициент мощности увеличивается до единицы или 100 процентов. Когда коэффициент мощности равен единице, трехфазная цепь переменного тока не подает ток и поле постоянного тока цепь обеспечивает весь ток, необходимый для поддержания прочного ротора поле.Величина возбуждения постоянного поля, необходимая для достижения единичной мощности фактор называется возбуждением нормального поля. Если магнитное поле ротора дополнительно усиливается за счет увеличения постоянный ток поля выше значения возбуждения нормального поля, мощность коэффициент уменьшается. Однако коэффициент мощности является ведущим, когда поле постоянного тока перевозбужден, Трехфазная цепь переменного тока, питающая обмотку статора, обеспечивает размагничивающая составляющая тока, противодействующая слишком сильному ротору поле.Это действие приводит к ослаблению поля ротора до нормального. магнитная сила. Диаграммы на рисунке 8 показывают, как поле постоянного тока поддерживается или противодействует. магнитным полем, создаваемым обмотками переменного тока. В fgr 8 предполагается, что постоянное поле стационарно и вращающийся якорь подключен к источнику переменного тока. Помните, что большинство синхронных двигателей имеют стационарные обмотки переменного тока и вращающееся поле постоянного тока. Однако в любом случае принцип работы такой же. ill 9 показывает две характеристические рабочие кривые для трехфазного синхронный двигатель. При нормальном возбуждении полного поля коэффициент мощности имеет пиковое значение единицы или 100 процентов, а переменный ток статора равен самое низкое значение. По мере уменьшения значения постоянного тока возбуждения мощность коэффициент уменьшается в квадранте отставания, что приводит к быстрому росту в переменном токе статора.Если постоянный ток возбуждения увеличивается выше При нормальном возбуждении поля коэффициент мощности уменьшается в ведущем квадранте, что приводит к быстрому увеличению переменного тока статора. Показано, что синхронный двигатель работает с перевозбужденным Поле постоянного тока имеет ведущий коэффициент мощности. По этой причине трехфазный синхронный двигатель часто подключается к трехфазной промышленной фидерной цепи, имеющей низкий отстающий коэффициент мощности. Другими словами, синхронный двигатель с перевозбужденное поле постоянного тока скорректирует коэффициент мощности промышленного фидерный контур. В ФГР 10 подключены два асинхронных двигателя с запаздывающими коэффициентами мощности. к промышленной фидерной цепи. Синхронный двигатель, подключенный к тот же фидер работает с перевозбужденным полем постоянного тока. Поскольку синхронный двигатель можно отрегулировать так, чтобы результирующий коэффициент мощности был опережающим, коэффициент мощности промышленного фидера можно корректировать до значение около единицы или 100 процентов. Реверс вращения Направление вращения синхронного двигателя меняется на противоположное путем переключения любые два из трех линейных выводов, питающих обмотку статора. Направление вращения двигателя не меняется, если два проводника постоянного тока источник поменяны местами. ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ Трехфазный синхронный двигатель используется, когда первичный двигатель имеет требуется постоянная скорость от состояния холостого хода до полной нагрузки, например как вентиляторы, воздушные компрессоры и насосы.Синхронный двигатель используется в некоторых промышленные приложения для управления механической нагрузкой, а также правильной мощности фактор. В некоторых приложениях этот тип двигателя используется только для исправления коэффициент мощности промышленной энергосистемы. Когда синхронный двигатель используется только для корректировки коэффициента мощности и не управляет никакими механическими нагрузки, он служит той же цели, что и батарея конденсаторов, используемых для питания факторная коррекция. Поэтому в такой установке двигатель называется асинхронный конденсатор. Трехфазные синхронные двигатели мощностью до 10 лошадиных сил, обычно запускаются непосредственно при номинальном трехфазном напряжении. Синхронный двигатели больших размеров запускаются через пусковой компенсатор или автоматический стартер. В этом типе запуска напряжение, приложенное к клеммы двигателя в момент пуска составляют примерно половину значения номинальное сетевое напряжение и пусковой скачок тока ограничены. РЕЗЮМЕ Синхронный двигатель переменного тока используется там, где скорость должна быть постоянной.Как следует из названия, двигатель будет работать с расчетной синхронной скоростью. Принцип, используемый в более крупных трехфазных синхронных двигателях, заключается в обеспечении поле постоянного тока для ротора. Методы могут отличаться в зависимости от применения Округ Колумбия. Некоторые двигатели используют внешний источник постоянного тока и подают постоянный ток на ротор. через контактные кольца. Другие двигатели будут управлять магнитным полем ротора и использовать твердотельные выпрямители для создания постоянного тока в роторе. В любом случае, поле ротора может изменить коэффициент мощности синхронного двигателя и позволить ему действовать как источник опережающего коэффициента мощности, тем самым корректируя нормальный коэффициент мощности промышленной энергосистемы. ВИКТОРИНА ОБЗОР : A. Полностью ответьте на следующие вопросы. 1. Перечислите основные части трехфазного синхронного двигателя. _____ 2. Что такое обмотка амортизатора? 3. Объясните правильную процедуру запуска синхронного двигателя. _______ 4. Трехфазный синхронный двигатель с шестью полюсами статора и шестью роторами. Полюсы работают от трехфазной 60-герцовой линии с правильным напряжением. рейтинг.Определите скорость двигателя. 5. Как получить опережающий коэффициент мощности с трехфазным синхронным мотор? 6. Для чего нужен реостат в отдельно возбужденном постоянном поле? схема синхронного двигателя? ____ 7. Какое направление вращения трехфазного синхронного двигателя? отменено? 8. Назовите два важных применения трехфазных синхронных двигателей. 9. Что такое синхронный конденсатор? Б.Выберите правильный ответ для каждого из следующих утверждений и поместите соответствующую букву в отведенное место. 10. Необходимо запустить синхронный двигатель а. при полном постоянном токе в цепи возбуждения. г. при слабом постоянном токе в цепи возбуждения. г. как асинхронный двигатель. г. при низком коэффициенте мощности. 11. Скорость синхронного двигателя а. постоянно от холостого хода до полной нагрузки. г. падает с холостого хода до полной. г. увеличивается от холостого хода до полной нагрузки. г. изменяется от холостого хода до полной нагрузки. 12. Синхронный двигатель с недовозбужденным полем постоянного тока имеет: а. ведущий коэффициент мощности. г. отстающий коэффициент мощности. г. меньшая синхронная скорость. г. нет эффекта. 13. Коэффициент мощности синхронного двигателя можно изменять, изменяя номер: а.полярность кисти. г. чередование фаз. г. скорость вращения. г. Возбуждение поля. 14. Синхронный двигатель, работающий от трехфазного сетевого напряжения, обслуживает та же функция коррекции коэффициента мощности, что и _______ а. |