
Пять особенностей линейных стабилизаторов, о которых нужно знать
16 января 2019
системы безопасностиавтомобильная электроникауправление питаниемавтоматизацияинтернет вещейMaxim Integratedстатьяинтегральные микросхемы
С первого взгляда линейные регуляторы (LDO) кажутся достаточно простыми компонентами, однако очень часто возникают ситуации, когда они работают нештатно. В данной статье рассматриваются пять особенностей стабилизаторов: поведение LDO при запуске, потребление LDO при малых входных напряжениях, особенности отклика LDO при изменении нагрузки, влияние собственного шума и PSRR стабилизатора на общий выходной шум, а также реализация входной защиты LDO. Понимание этих особенностей делает выбор стабилизатора более осознанным и упрощает процесс отладки. Приводятся примеры интегральных стабилизаторов производства Maxim Integrated, в которых учтены перечисленные особенности.
В настоящий момент выбор подходящего линейного стабилизатора зачастую заключается в просмотре бесконечных таблиц с применением параметрических фильтров. Какое выходное напряжение нужно? Каков максимальный нагрузочный ток? Каково предельно допустимое входное напряжение? Какой диапазон входных напряжений требуется? Какое следует выбрать корпусное исполнение? Какие габариты будут у компонентов обвязки? Перечень подходящих регуляторов может быть уменьшен с учетом дополнительных параметров. Например, что если нагрузка чувствительна к колебаниям напряжения питания? Тогда стабилизатор должен обладать очень малым собственным шумом и высоким коэффициентом подавления нестабильности питания (PSRR). Если же разрабатывается устройство с батарейным питанием, то потребуется регулятор со сверхмалым уровнем потребления.
С учетом перечисленных требований исходный список стабилизаторов сократится до нескольких подходящих моделей. Но это еще не все. Перед тем как сделать окончательный выбор, нужно ответить еще на пять вопросов:
- Как регулятор ведет себя при запуске?
- Останется ли ток потребления малым, если входное напряжение окажется на нижней границе рабочих напряжений (или даже меньше)?
- Как ведет себя стабилизатор при изменении нагрузки?
- Что является основным источником выходного шума: собственный шум стабилизатора или внешний шум из-за малого значения PSSR?
- Как стабилизатор ведет себя при выключении?
Эти вопросы могут показаться не такими важными, пока не возникнут проблемы. Но когда проблемы появятся вы, скорее всего, почувствуете себя обманутым или, по крайней мере, недостаточно осведомленным. Придется потратить дополнительное время на устранение неполадок и, возможно, на доработку своей платы.
Но когда проблемы появятся вы, скорее всего, почувствуете себя обманутым или, по крайней мере, недостаточно осведомленным. Придется потратить дополнительное время на устранение неполадок и, возможно, на доработку своей платы.
Попробуем пролить свет на эти вопросы. Возможно, предложенная информация будет полезна в ближайшем будущем при очередном выборе линейного регулятора.
Запуск
Многие стабилизаторы имеют вход разрешения, с помощью которого можно включать и выключать регулятор при необходимости экономии энергии. Обычно в таких стабилизаторах есть также функция плавного запуска (Soft Start). Плавный запуск предотвращает перегрузку регулятора при включении. Данная функция может быть реализована двумя способами.
Плавный запуск с ограничением тока
Первый способ – плавный запуск с ограничением тока (Current Soft Start). В большинстве регуляторов существует ограничение выходного тока. Функция плавного запуска заключается в плавном или пошаговом увеличении тока ограничения при запуске (рисунок 1). При этом выходное напряжение будет плавно нарастать, так как ток заряда выходного конденсатора оказывается меньше, чем максимально допустимый нагрузочный ток стабилизатора. Преимущество данного подхода заключается в том, что входной ток регулятора будет плавно увеличиваться согласно заданному шаблону, и помехи от пускового тока нагрузки не будут передаваться на вход стабилизатора.
При этом выходное напряжение будет плавно нарастать, так как ток заряда выходного конденсатора оказывается меньше, чем максимально допустимый нагрузочный ток стабилизатора. Преимущество данного подхода заключается в том, что входной ток регулятора будет плавно увеличиваться согласно заданному шаблону, и помехи от пускового тока нагрузки не будут передаваться на вход стабилизатора.
Рис. 1. Временные диаграммы режимов плавного запуска с ограничением тока и напряжения
Анализируя переходные процессы при включении стабилизатора, можно обнаружить, что на осциллограмме выходного напряжения есть точки перелома, в которых напряжение начинает уменьшаться. Рассмотрим эту особенность подробнее. После включения линейного регулятора происходит заряд выходного конденсатора и питание нагрузки. Если выходной ток превышает значение тока ограничения, напряжение на нагрузке падает ниже определенного уровня и происходит его возврат в состояние сброса. Далее цикл повторяется, и нагрузка то включается, то выключается.
Плавный запуск с ограничением напряжения
Второй способ – плавный запуск с ограничением напряжения (Voltage Soft Start). При таком подходе выходное напряжение увеличивается плавно и линейно, без каких-либо скачков при включении (рисунок 1). Подобное поведение также защищает нагрузку от повторных сбросов, так как напряжение пересекает пороговую точку сброса один раз.
В данном случае пусковой ток определяется выходной емкостью, скоростью нарастания выходного напряжения и током, потребляемым нагрузкой. Как правило, скорость нарастания выходного напряжения устанавливается на уровне, который обеспечивает пусковой ток в диапазоне 1…10% от максимального выходного тока (при использовании рекомендованного минимального выходного конденсатора). Установка пускового тока на уровне менее 10% позволяет использовать выходные конденсаторы большей емкости и компенсировать повышенный ток нагрузки.
На рисунке 1 представлено сравнение временных диаграмм режимов плавного запуска с ограничением тока и с ограничением напряжения.
Увеличение тока потребления при работе с малыми входными напряжениями
Если схема питается от аккумулятора, то величина собственного потребления стабилизатора имеет большое значение. Нагрузка может находиться в активном состоянии в течение краткого интервала времени, а потом надолго переходить в режим ожидания, экономя энергию. В этом случае время автономной работы будет в значительной степени определяться собственным потреблением регулятора. Если это так, вы, скорее всего, выберете линейный регулятор с минимальным питающим током.
Теперь представьте, что ваша аккумуляторная батарея разряжена до такой степени, что разница между входным и выходным напряжением стабилизатора становится минимальной. При работе в таком режиме стабилизатор старается как можно сильнее открыть внутренний силовой транзистор, чтобы обеспечить минимальное падение напряжения, даже если выходной ток нагрузки очень мал. Проблема заключается в том, что «усиленное» открывание транзистора приведет к увеличению потребления схемы управления затвором (рисунок 2). В результате режим ожидания превращается в режим быстрой разрядки батареи.
При работе в таком режиме стабилизатор старается как можно сильнее открыть внутренний силовой транзистор, чтобы обеспечить минимальное падение напряжения, даже если выходной ток нагрузки очень мал. Проблема заключается в том, что «усиленное» открывание транзистора приведет к увеличению потребления схемы управления затвором (рисунок 2). В результате режим ожидания превращается в режим быстрой разрядки батареи.
Рис. 2. Увеличение тока потребления при работе с малыми входными напряжениями из-за роста потребления схемы управления затвором силового транзистора
Подобное увеличение тока при работе с малыми входными напряжениями – не редкость даже для самых лучших стабилизаторов. Двукратный рост потребления не является чем-то необычным, а некоторые регуляторы характеризуются увеличением потребления в 10 раз и более. Иногда информация об увеличении потребляемого тока при работе с малыми входными напряжениями приводится в документации в виде таблиц и графиков. Однако чаще всего эта информация отсутствует.
Если в конкретном приложении величина тока потребления имеет большое значение, следует выбирать стабилизатор, для которого в документации приведена подробная информация об этом параметре или самостоятельно измерять уровень тока, чтобы убедиться, что регулятор отвечает предъявляемым требованиям.
Отклик стабилизатора на изменение нагрузки
Линейные регуляторы имеют возможность стабилизации выходного напряжения при изменении нагрузки. Когда происходит изменение нагрузки, напряжение на затворе встроенного силового транзистора также должно измениться. Время, необходимое для того чтобы напряжение на затворе достигло нового значения, обычно определяет уровень перерегулирования и недорегулирования.
Обычно быстрый переход к полной нагрузке является худшим случаем с недорегулированием выходного напряжения. Перед сравнением динамических характеристик регуляторов всегда следует проверять значения начальных токов. Переход от нагрузки 10% к нагрузке 100% будет более быстрым, чем переход от начальной нагрузки 1% к нагрузке 100%, так как в первом случае выходное напряжение будет ближе к конечному значению. Гораздо труднее добиться хороших показателей при переходе от состояния с нулевой нагрузкой к полной нагрузке.
Гораздо труднее добиться хороших показателей при переходе от состояния с нулевой нагрузкой к полной нагрузке.
Можно предположить, что поддержание некоторого минимального тока нагрузки поможет избежать значительной задержки при включении максимальной нагрузки. Да, поможет, но это не всегда является хорошим решением. Дело в том, что при обратном переходе от полной нагрузки к минимальной часто возникает перерегулирование выходного напряжения. При этом регулятор находится в наиболее уязвимом состоянии, в котором его внутренний силовой транзистор полностью отключен. Если в этот момент нагрузка вновь увеличится, то будет наблюдаться недорегулирование, которое окажется еще более значительным, чем при первоначальном переходе.
Если работа схемы предполагает наличие быстрых перепадов нагрузки, следует проверять динамические характеристики стабилизаторов с использованием описанного выше алгоритма. На рисунке 3 показано ухудшение отклика регулятора при повторном быстром увеличении нагрузки.
Рис. 3. Ухудшение отклика регулятора при повторном быстром увеличении нагрузки
Собственный шум стабилизатора и коэффициент подавления помех по питанию (PSRR)
Регуляторы, предназначенные для создания малошумящих приложений, как правило, обладают и высоким значением коэффициента подавления нестабильности питания (PSRR). Это логично, так как чувствительность нагрузки к помехам не зависит от причины их возникновения.
Если стабилизатор подключен к импульсному регулятору, то малый коэффициент PSRR может создать больше проблем, чем собственный выходной шум стабилизатора. Рассмотрим случай совместного использования стабилизатора с понижающим импульсным регулятором для питания чувствительной к шуму нагрузки. Если на частоте 100 кГц пульсации выходного напряжения импульсного преобразователя составляют 50 мВ (от пика до пика), а величина PSRR линейного регулятора на той же частоте 100 кГц равна 60 дБ, то на выходе стабилизатора будут наблюдаться пульсации 50 мкВ (от пика до пика), что эквивалентно среднеквадратичному выходному шуму 15 мкВ. Допустим, выбран малошумящий стабилизатор, для которого в полосе частот 10 Гц…100 кГц собственный выходной шум составляет менее 5 мкВ (среднеквадратичное значение). Тогда окажется, что шум из-за входных пульсаций от DC/DC-преобразователя и малого PSRR будет в три раза выше собственного шума стабилизатора (рисунок 4).
Допустим, выбран малошумящий стабилизатор, для которого в полосе частот 10 Гц…100 кГц собственный выходной шум составляет менее 5 мкВ (среднеквадратичное значение). Тогда окажется, что шум из-за входных пульсаций от DC/DC-преобразователя и малого PSRR будет в три раза выше собственного шума стабилизатора (рисунок 4).
Рис. 4. Общий выходной шум определяется вкладом PSRR
При работе с высокими выходными напряжениями собственный шум линейного регулятора может преобладать над PSRR. Это связано с тем, что собственный шум увеличивается в соответствии с делителем обратной связи. Рассмотрим схему, в которой линейный регулятор используется для преобразования зашумленного напряжения 17 В от повышающего DC/DC-преобразователя в напряжение 16 В с уровнем пульсацией менее 100 мВ. Если PSRR стабилизатора на частоте переключений составляет 60 дБ, то пульсации 50 мВ (от пика до пика) от повышающего преобразователя будут ослаблены до 50 мкВ (от пика до пика) или 15 мкВ (ср.кв.) на выходе. Шум 5 мкВ (ср. кв.) встроенного опорного источника может показаться малым и не представляющим опасности. Однако если сигнал обратной связи уменьшается до 1,25 В, а напряжение на резисторе обратной связи 16 В, то выходной шум составит 5 мкВ × (16 В/1,25 В) или 64 мкВ (ср.кв). Таким образом, собственный шум стабилизатора будет вносить основной вклад в общий выходной шум (рисунок 5).
кв.) встроенного опорного источника может показаться малым и не представляющим опасности. Однако если сигнал обратной связи уменьшается до 1,25 В, а напряжение на резисторе обратной связи 16 В, то выходной шум составит 5 мкВ × (16 В/1,25 В) или 64 мкВ (ср.кв). Таким образом, собственный шум стабилизатора будет вносить основной вклад в общий выходной шум (рисунок 5).
Рис. 5. Увеличение выходного шума при работе с высокими напряжениями
При поиске оптимального стабилизатора для чувствительной нагрузки следует учитывать как выходной шум, так и PSRR.
Защита входа
Обычно в линейных регуляторах присутствует обратный диод, встроенный в силовой МОП-транзистор. Из-за этого диода выходное напряжение не может превышать входное напряжение больше, чем на 0,7 В. В большинстве случаев этот диод не влияет на работу стабилизатора, но есть два случая, когда он может создать проблемы.
Защита от обратного напряжения
Иногда возникают ситуации, когда на вход устройства подается напряжение питания обратной полярности, например, при использовании стандартных батареек. Хотя разъем для установки батареек в отсеке питания имеет особую формовку выводов и защищает от неправильного подключения, тем не менее, он не гарантирует полную защиту и допускает возможность ошибки с возникновением кратковременных обратных напряжений.
Хотя разъем для установки батареек в отсеке питания имеет особую формовку выводов и защищает от неправильного подключения, тем не менее, он не гарантирует полную защиту и допускает возможность ошибки с возникновением кратковременных обратных напряжений.
Защита от обратной полярности позволяет напряжению на входе быть меньше напряжения на выводе земли без существенного увеличения тока. Для этого необходимо отключить встроенный диод силового транзистора с помощью дополнительного последовательного ключа. У большинства регуляторов на входе есть диоды, защищающие от обратной полярности и электростатических разрядов (ESD). Их также необходимо исключить и использовать специализированную схему защиты (рисунок 6).
Рис. 6. Защита от обратного напряжения
Примером стабилизатора с защитой от обратной полярности является MAX1725, который способен выдерживать обратные напряжения до -12 В без значительного увеличения входного тока.
Защита от обратного тока
Очень часто защиту от обратного тока в линейных регуляторах путают с защитой от обратного напряжения. Хотя для ее реализации также требуется блокировка встроенного диода силового транзистора, тем не менее, механизм защиты имеет значительные отличия. На рисунке 7 показано как работает схема защиты от обратного тока.
Хотя для ее реализации также требуется блокировка встроенного диода силового транзистора, тем не менее, механизм защиты имеет значительные отличия. На рисунке 7 показано как работает схема защиты от обратного тока.
Рис. 7. Защита от обратного тока
Рассмотрим случай, когда значительная емкостная нагрузка, например, аудиосистема со множеством развязывающих конденсаторов, питается от линейного регулятора. Предположим также, что линейный регулятор, в свою очередь, питается от мощного понижающего преобразователя. Кроме того, при выключении выход импульсного преобразователя замыкается на землю. Вполне ожидаемо, что при первом же выключении линейный регулятор выйдет из строя, так как конденсаторы нагрузки начнут одновременно разряжаться, и ток будет протекать через встроенный диод силового транзистора стабилизатора.
В линейных регуляторах с защитой от обратного тока эта проблема решена. В них внутренний диод отключается, если уровень входного напряжения падает ниже выходного. Если до этого стабилизатор находился в рабочем состоянии, то силовой транзистор отключится не сразу, и некоторое время ток будет течь в обратном направлении. Стоит отметить, что данная функция защищает от протекания тока от выхода ко входу, и не ограничивает входной ток при приложении входного напряжения обратной полярности.
Если до этого стабилизатор находился в рабочем состоянии, то силовой транзистор отключится не сразу, и некоторое время ток будет течь в обратном направлении. Стоит отметить, что данная функция защищает от протекания тока от выхода ко входу, и не ограничивает входной ток при приложении входного напряжения обратной полярности.
Примером стабилизатора с защитой от обратного тока является MAX8902, который блокирует обратный разрядный ток выходных конденсаторов нагрузки, если вход закорочен на землю.
Заключение
Рассмотренные в статье особенности линейных регуляторов могут оказаться чрезвычайно важными для многих приложений. К сожалению, они редко учитываются в параметрическом поиске. Кроме того, по предоставляемой документации не всегда удается определить, какой набор функций имеет тот или иной стабилизатор. Тем не менее, знание возможных потенциальных проблем делает выбор оптимального регулятора более осознанным.
Оригинал статьи
•••
CUI inc blog: Сравнение линейного стабилизатора и импульсного регулятора напряжения
Очень часто в электрической схеме для питания отдельных узлов необходимы разные уровни напряжения. Неизолированные регуляторы — это распространенный и простой способ преобразовать одно напряжение в другое. Регуляторы обычно делятся на две категории в зависимости от метода преобразования: линейные или импульсные. Линейные стабилизаторы дёшевы и просты в использовании. Однако простота достигается за счет низкой эффективности. С другой стороны, импульсные преобразователи дороже и сложнее, но значительно более эффективны и соответственно меньше греются чем линейные стабилизаторы.
Неизолированные регуляторы — это распространенный и простой способ преобразовать одно напряжение в другое. Регуляторы обычно делятся на две категории в зависимости от метода преобразования: линейные или импульсные. Линейные стабилизаторы дёшевы и просты в использовании. Однако простота достигается за счет низкой эффективности. С другой стороны, импульсные преобразователи дороже и сложнее, но значительно более эффективны и соответственно меньше греются чем линейные стабилизаторы.
| Линейные регуляторы | Импульсные преобразователи |
| Простая конструкция | Более сложная конструкция |
| Низкий КПД | Высокий КПД |
| Большая тепловая нагрузка | Малая тепловая нагрузка |
Линейный стабилизатор
В качестве примера рассмотрим схему с линейным стабилизатором (рисунок 1). Исходные параметры: вход 24 В преобразуется в выход 6 В, ток нагрузки 1 А.
Рисунок 1 — Упрощенная схема линейного стабилизатора
Между входом и выходом находится проходной элемент,транзистор (Q1). Это означает, что напряжение на транзисторе (Q1) представляет собой разницу между входом и выходом.
Следовательно выходное напряжение можно определить, как:
Как мы видим, что Vout регулируется путем управления напряжением на транзисторе Q1. Управление осуществляется с помощью операционного усилителя U1 с отрицательной обратной связью. Операционный усилитель сравнивает Vout с заданным значением. Если Vout больше, то напряжение на Q1 увеличивается, что вызовет уменьшение Vout. Если же Vout слишком низкое, то падение напряжения на Q1 становится меньше и Vout растет до заданного значения.
КПД линейных регуляторов
Для оценки КПД линейного регулятора, рассмотрим путь тока нагрузки. Поскольку операционный усилитель U1 имеет очень высокое входное сопротивление и управляет только базой транзистора, то через него практически не протекает никакой ток. Остается прямой путь от входа к выходу, что означает, что входной ток равен выходному току.
Остается прямой путь от входа к выходу, что означает, что входной ток равен выходному току.
Теперь мы можем использовать эту информацию для расчета эффективности и мощности, рассеиваемой линейным регулятором. Входная мощность равна Vin, умноженному на Iin.
Аналогично, выходная мощность находится, как:
А КПД стабилизатора:
Разница между входной (потребляемой) мощностью и выходной (мощность нагрузки) 18Вт! Эта мощность, рассеивается в маленьком корпусе линейного стабилизатора. Так, для корпуса TO-220 типичное тепловое сопротивление 20°C/Вт и 18 Вт рассеиваемой мощности приведет к нагреву на 360°C (без учета обдува и дополнительного радиатора).
Это явно приведет к разрушению стабилизатора, если не будут приняты меры для уменьшения теплового сопротивления: ставится дополнительный радиатор, делают принудительный обдув воздушным потоком. Всё это увеличивает размер, стоимость и сложность системы, что сводит на нет многие преимущества линейного регулятора (простота использования и дешевизна).
Из-за того что входной ток равен выходному, расчет КПД можно упростить до Vout, деленного на Vin. Из этого следует, что чем больше разница между Vout и Vin, тем ниже КПД и тем больше мощности будет рассеиваться в регуляторе.
Рисунок 2 — Падение КПД из-за роста входного напряжения (напряжение нагрузки = const)
Импульсные преобразователи
Импульсные регуляторы работают иначе, чем линейные. Основное различие связано с управлением транзистором. На рисунке 3 показана упрощенная схема понижающего преобразователя, который вырабатывает выходное напряжение ниже входного, и выполняет ту же функцию, что и линейный стабилизатор в нашем предыдущем примере.
Рисунок 3
Как и линейный регулятор, импульсный преобразователь использует операционный усилитель и отрицательную обратную связь для управления транзистором.
Первое существенное отличие и причина того, что он называется импульсным стабилизатором, заключается в том, что транзистор приводится в действие так, что он либо полностью открыт (в идеале — короткое замыкание), либо полностью закрыт (в идеале — разомкнутая цепь). Сравните с линейным регулятором, где транзистор меняет свое сопротивление линейно. Здесь же транзистор Q1 включается и выключается с высокой частотой и создает прямоугольные импульсы в узле, соединяющем Q1, D1 и L1, который мы называем узлом переключения.
Сравните с линейным регулятором, где транзистор меняет свое сопротивление линейно. Здесь же транзистор Q1 включается и выключается с высокой частотой и создает прямоугольные импульсы в узле, соединяющем Q1, D1 и L1, который мы называем узлом переключения.
Выходное напряжение регулируется путем контроля среднего значения напряжения коммутационного узла. Для работы с фиксированной частотой среднее значение равно времени включения переключателя (SWon), деленному на период (SWon+SWoff), умноженный на входное напряжение (Vin).
Отношение времени включения к периоду известно как коэффициент заполнения (или рабочий цикл) и в понижающем стабилизаторе равно отношению выходного напряжения к входному напряжению. В нашем примере коэффициент заполнения 25%: для преобразования входа 24 В в выход 6 В.
Прямоугольные импульсы с коммутационного узла подаются в LC цепь между коммутационным узлом и выходом. LC-цепь представляет собой фильтр нижних частот, сглаживая пульсации. Таким образом, управляя продолжительностью рабочего цикла, а следовательно и средним напряжением в коммутационном узле, импульсный преобразователь может менять выходное напряжение. Этот процесс известен как широтно-импульсная модуляция (ШИМ).
Таким образом, управляя продолжительностью рабочего цикла, а следовательно и средним напряжением в коммутационном узле, импульсный преобразователь может менять выходное напряжение. Этот процесс известен как широтно-импульсная модуляция (ШИМ).
КПД импульсных преобразователей
Чтобы понять, почему эта схема более эффективна, чем линейный стабилизатор, рассмотрим импульсный регулятор во включенном и в выключенном состоянии при тех же условиях (Vin=24В, Vout=6В).
Во включенном состоянии транзистор полностью открыт. В этом случае ток будет течь от входа к выходу, но потери в транзисторе равны 0 Вт, потому что падение напряжения на нем равно нулю. Все остальные элементы на пути тока (катушка индуктивности, конденсатор и диод) в идеале работают без потерь, поэтому во время работы мощность не рассеивается (для идеальной модели).
В выключенном состоянии транзистор полностью разомкнут. В этом случае напряжение на транзисторе равно входному напряжению, но через него не течет ток, потому что это разомкнутая цепь. Мощность, рассеиваемая транзистором в этом состоянии, также равна 0 Вт.
Мощность, рассеиваемая транзистором в этом состоянии, также равна 0 Вт.
Это значит, что верхний предел КПД равен 100%, тогда как линейный стабилизатор имеет верхний предел, равный Vout / Vin.
В действительности, катушка индуктивности, конденсатор и диод не идеальны и все они будут вносить потери, снижающие КПД. Транзистор также будет иметь потери из-за сопротивления в открытом состоянии наряду с потерями при переключении. То есть КПД импульсного преобразователя зависит от выбранных компонентов и условий эксплуатации. С другой стороны, эффективность линейного регулятора не зависит от выбранных компонентов и зависит только от условий входного и выходного напряжения.
Практические последствия низкого КПД
Как упоминалось выше, одной из основных причин популярности линейных регуляторов стала их низкая стоимость, простота и привычность в применении. Однако необходимость отводить большое количество тепла может потребовать использования радиатора и принудительного воздушного потока, что противоречит этим преимуществам. Импульсные регуляторы являются хорошей альтернативой, и хотя они дороже, стоимость конечного устройства может снизиться за счет отказа от дорогих и громоздких устройств охлаждения. Сравните размеры линейного регулятора с радиатором и импульсного преобразователя, для питания одинаковой нагрузки.
Импульсные регуляторы являются хорошей альтернативой, и хотя они дороже, стоимость конечного устройства может снизиться за счет отказа от дорогих и громоздких устройств охлаждения. Сравните размеры линейного регулятора с радиатором и импульсного преобразователя, для питания одинаковой нагрузки.
Чтобы упростить внедрение импульсных преобразователей в приложениях, где традиционно используются линейные стабилизаторы, CUI предлагает несколько серий импульсных регуляторов, совместимых по выводам и посадочному месту с классическим линейным регулятором серии 7800 в корпусе TO-220. Эти импульсные регуляторы обеспечивают КПД до 94% и могут работать без какого-либо дополнительного охлаждения при температуре окружающей среды выше 65°C (149°F).
Рисунок 5- КПД импульсного преобразователя P78E15-1000 в зависимости от тока нагрузки.
Заключение
Линейные стабилизаторы- это испытанное и надежное решение. Однако их изначально низкий КПД может стать серьезной проблемой, если они проводят большие токи или работают с большим соотношением входного и выходного напряжений. Хотя импульсные регуляторы более сложны внутри и могут напугать тех, кто с ними не знаком, CUI Inc предлагает широкий спектр импульсных регуляторов с различными номинальными токами и и вариантами корпусов, которые так же просты в использовании, как классический линейный стабилизатор.
Однако их изначально низкий КПД может стать серьезной проблемой, если они проводят большие токи или работают с большим соотношением входного и выходного напряжений. Хотя импульсные регуляторы более сложны внутри и могут напугать тех, кто с ними не знаком, CUI Inc предлагает широкий спектр импульсных регуляторов с различными номинальными токами и и вариантами корпусов, которые так же просты в использовании, как классический линейный стабилизатор.
Компания ФОРМПОСТ (Formpost LLC) — официальный дистрибьютор CUI Inc.
https://www.cui.com/
http://www.formpost.pro/
Линейные регуляторы с малым падением напряжения (LDO)
Линейные регуляторы и регуляторы с малым падением напряжения (LDO) — это простой и недорогой способ обеспечить регулируемое выходное напряжение, которое питается от более высокого входного напряжения в различных приложениях. Наш обширный ассортимент поможет вам справиться практически с любой задачей проектирования регуляторов, от питания чувствительных аналоговых систем до продления срока службы батарей. Наши решения включают в себя первый в отрасли интеллектуальный линейный стабилизатор переменного/постоянного тока, а также множество функций, таких как низкий уровень шума, широкий диапазон входного напряжения (В IN ), небольшой размер корпуса и низкий ток покоя (I Q ).
Наш обширный ассортимент поможет вам справиться практически с любой задачей проектирования регуляторов, от питания чувствительных аналоговых систем до продления срока службы батарей. Наши решения включают в себя первый в отрасли интеллектуальный линейный стабилизатор переменного/постоянного тока, а также множество функций, таких как низкий уровень шума, широкий диапазон входного напряжения (В IN ), небольшой размер корпуса и низкий ток покоя (I Q ).
Выбор по входному напряжению
Выберите рекомендуемые LDO
Новые продукты
параметрический фильтр Посмотреть все продукты ТПС7А43 НОВЫЙТПС7А43 АКТИВНЫЙ
50 мА, 85 В, сверхнизкий IQ, двойной стабилизатор напряжения с малым падением напряжения, обеспечивающий высокую мощность и точность
Прибл. цена (USD) 1ку | 1,37
LP5912-EP НОВЫЙLP5912-EP АКТИВНЫЙ
Усовершенствованный продукт, 500 мА, малошумящий, низкий IQ, регулятор с малым падением напряжения и защитой от обратного тока
Прибл. цена (USD) 1ку | 3,49
цена (USD) 1ку | 3,49
ТПС7А74 АКТИВНЫЙ
1,5-амперный линейный стабилизатор с малым падением напряжения (LDO) и программируемым плавным пуском
Прибл. цена (USD) 1ку | 0,5
ТПС7А16А НОВЫЙТПС7А16А АКТИВНЫЙ
100 мА, 60 В, ток покоя 5 мкА, стабилизатор напряжения с малым падением напряжения (LDO) с питанием и включением
Прибл. цена (USD) 1ку | 0,99
ТПС7А57 НОВЫЙТПС7А57 АКТИВНЫЙ
5-А, малошумящий, высокоточный регулятор напряжения с малым падением напряжения (LDO) с низким входным напряжением
Прибл. цена (USD) 1ку | 5,5
ТПС7А15 НОВЫЙТПС7А15 АКТИВНЫЙ
400 мА, низкое входное и выходное напряжение, регулятор напряжения со сверхмалым падением напряжения (LDO)
Прибл. цена (USD) 1ку | 0,22
Технические ресурсы
Электронная книгаЭлектронная книга
Основы LDO (версия A)
Прочтите об основах работы с LDO, включая отсев, рассеивание тепла, I Q , PSRR и шумовые характеристики. Узнайте, как предотвратить обратный ток и почему емкость конденсатора не равна его емкости.
Узнайте, как предотвратить обратный ток и почему емкость конденсатора не равна его емкости.
документ-pdfAcrobat ПДФ
Руководство по выборуРуководство по выбору
Регуляторы с малым падением напряжения Краткое справочное руководство (версия P)
В этом кратком справочном руководстве вы найдете наши самые популярные LDO и линейные регуляторы напряжения для любого применения, включая промышленное, автомобильное, персональную электронику и коммуникационное оборудование. .
документ-pdfAcrobat ПДФ
Примечание по применениюЗамечания по применению
Тематический указатель замечаний по применению TI LDO (Rev. F)
Коллекция наших замечаний по применению LDO, разбитых по темам, с краткими аннотациями по каждой из них, чтобы помочь вам быстро найти наиболее важную информацию о приложении.
документ-pdfAcrobat PDF
Ресурсы для проектирования и разработки
Инструмент моделирования
PSpice® for TI инструмент проектирования и моделирования
PSpice® for TI — это среда проектирования и моделирования, помогающая оценить функциональность аналоговых схем. В этом полнофункциональном пакете для проектирования и моделирования используется модуль аналогового анализа от Cadence®. Доступный бесплатно PSpice для TI включает в себя одну из крупнейших библиотек моделей в (…)
Оценочная плата
Универсальный модуль оценки линейного стабилизатора напряжения LDO для корпусов DBV, DRB, DRV и DQN
Оценочный модуль MULTIPKGLDOEVM-823 (EVM) помогает оценить работу и производительность нескольких распространенных комплектов линейных регуляторов для возможного использования в схемных приложениях. Эта конкретная конфигурация EVM имеет посадочное место DRB, DRV, DQN и DBV, которое вы можете паять, и (…)
Эта конкретная конфигурация EVM имеет посадочное место DRB, DRV, DQN и DBV, которое вы можете паять, и (…)
Оценочная плата
Универсальный модуль оценки линейных стабилизаторов напряжения LDO для корпусов DCY, DDA и KVU
Многокомпонентный оценочный модуль с низким падением напряжения (LDO) MLTLDO2EVM-037 (EVM) позволяет инженерам-проектировщикам оценить работу и производительность нескольких распространенных блоков линейных регуляторов для возможного использования в своих собственных схемах. Эта конфигурация EVM содержит DDA, 3-контактный и 5-контактный КВУ, (…)
Что такое линейный регулятор (регулятор LDO)? | Дизайн поддерживает
Основные сведения об ИС управления питанием, том. 2:
Линейный регулятор LDO-регулятор Фиксированное напряжение Выходной ток Выходной драйвер Резистор обратной связи Опорное напряжение Усилитель ошибки
Цепь отрицательной обратной связи Падение напряжения
Введение
В предыдущем томе этой серии мы кратко объяснили вам, где и как в мире используются ИС управления питанием. На этой странице мы расскажем об одном типе регулятора напряжения, называемом линейным регулятором.
На этой странице мы расскажем об одном типе регулятора напряжения, называемом линейным регулятором.
Вы помните, что существует два типа регуляторов напряжения: линейный и импульсный?
Регуляторы линейного типа можно далее разделить на два типа: последовательный тип, в котором транзистор вставляется в качестве переменного резистора последовательно между входом и нагрузкой *1 , и шунтирующий тип, в котором транзистор вставляется параллельно с нагрузка. В этой лекции мы сосредоточимся исключительно на линейном регуляторе последовательного типа, так как этот тип используется чаще, чем шунтирующий, применение которого весьма ограничено. Теперь приступим.
Содержимое
- Линейные регуляторы
- Структура схемы линейного регулятора
- Работа линейных регуляторов
- Регуляторы LDO
- Падение напряжения и выходного тока
- Заключение
Линейные регуляторы
Простейшие регуляторы называются 3-контактными регуляторами, которые выдают стабильное фиксированное напряжение, просто вставляя входной конденсатор (CIN) между контактами VIN и GND и выходной конденсатор (COUT) между VOUT и контакты заземления.
Тогда как эти регуляторы могут выдавать стабильное фиксированное напряжение?
Мы опишем, какие компоненты содержат линейные регуляторы и как они выдают фиксированное напряжение.
На рисунке 1 ниже показана краткая иллюстрация структуры схемы линейного регулятора.
Схема управления контролирует Vout и регулирует значение сопротивления переменного резистора так, чтобы линейный регулятор мог генерировать фиксированное выходное напряжение.
Рис. 1. Упрощенная внутренняя структура линейного регулятора
На рисунке показано, что схема управления контролирует выходное напряжение и регулирует значение сопротивления переменного резистора, чтобы ИС могла выводить установленное фиксированное напряжение. Например, если входное напряжение (VIN) фиксировано, линейный регулятор может поддерживать стабильное выходное напряжение, поддерживая фиксированное соотношение между значением переменного сопротивления и значением сопротивления нагрузки в соответствии со скоростью изменения значения сопротивления нагрузки. Входное напряжение делится на два резистора, поэтому линейные стабилизаторы генерируют более низкое выходное напряжение, чем их входное напряжение. Разница между более высоким входным напряжением и более низким выходным напряжением будет выделять тепло, которое называется отходящим теплом. Ток, протекающий внутри нагрузочного резистора, поступает на переменный резистор, где потребляется электроэнергия с выделением некоторого количества тепла.
Входное напряжение делится на два резистора, поэтому линейные стабилизаторы генерируют более низкое выходное напряжение, чем их входное напряжение. Разница между более высоким входным напряжением и более низким выходным напряжением будет выделять тепло, которое называется отходящим теплом. Ток, протекающий внутри нагрузочного резистора, поступает на переменный резистор, где потребляется электроэнергия с выделением некоторого количества тепла.
Эти взаимосвязи показаны на рис. 2. Например, в случае тока нагрузки 100 мА регулятор на входе 5 В и на выходе 2 В потребляет 0,3 Вт из 0,5 Вт входной электроэнергии внутри в виде тепла.
Линейный регулятор потребляет часть входной мощности и преобразует ее в тепло для создания фиксированного выходного напряжения.
Рис. 2. Изображение работы линейного регулятора
Структура схемы линейного регулятора
Линейные регуляторы состоят из четырех основных компонентов: выходного управляющего транзистора, блока опорного напряжения, резистора обратной связи и усилителя ошибки. На рис. 3 показана базовая структура типичного линейного регулятора.
На рис. 3 показана базовая структура типичного линейного регулятора.
Рис. 3. Базовая структура линейного регулятора
Роли каждого компонента следующие:
1. Транзистор выходного драйвера
Рис. 3 представляет собой пример линейного регулятора, построенного на МОП-транзисторе. Этот транзистор эквивалентен переменному резистору, показанному на рисунке 1.
Как показано на рисунке 2, где ток нагрузки и входной ток равны 100 мА, вывод VIN подает весь ток, протекающий через управляющий транзистор и вывод VOUT. к нагрузке. Линейные регуляторы поддерживают фиксированное выходное напряжение, регулируя сопротивление управляющего транзистора с помощью схемы управления (показанной на рисунке 1), состоящей из резистора обратной связи, блока опорного напряжения и усилителя ошибки.
2. Резистор обратной связи
Резистор обратной связи (RFB) назван в честь его роли в делении выходного напряжения с помощью двух резисторов (R1 и R2) и возвращении разделенного напряжения в усилитель ошибки. Разделенное напряжение называется напряжением обратной связи (VFB). Нижний индекс «FB» представляет собой обратную связь. Резистор обратной связи определяет фиксированный уровень выходного напряжения линейного регулятора, а уровень выходного напряжения определяется отношением сопротивлений R1 и R2.
Разделенное напряжение называется напряжением обратной связи (VFB). Нижний индекс «FB» представляет собой обратную связь. Резистор обратной связи определяет фиксированный уровень выходного напряжения линейного регулятора, а уровень выходного напряжения определяется отношением сопротивлений R1 и R2.
Диапазон выходного напряжения определяется продуктами, и в пределах указанного диапазона выходное напряжение может быть получено путем регулировки с помощью лазерной подгонки отношения сопротивлений R1 и R2 каждого кристалла пластины на всей пластине, изготовленной в процессе производства.
Кроме того, некоторые линейные регуляторы имеют вывод VFB для подключения оптимального внешнего резистора обратной связи, что позволяет пользователям гибко устанавливать выходное напряжение.
3. Блок опорного напряжения
Существует несколько методов создания блока опорного напряжения, и большинство из них обеспечивает уровень выходного напряжения около 1 В.
Традиционный метод, используемый для единицы эталонного напряжения, называется эталоном ширины запрещенной зоны (BGR). Хотя этот метод имеет хорошие характеристики, его ток питания и структура схемы обычно больше, поскольку в нем используется напряжение между базой и эмиттером биполярного транзистора. 1,25 В — обычно используемый уровень выходного напряжения для BGR.
Хотя этот метод имеет хорошие характеристики, его ток питания и структура схемы обычно больше, поскольку в нем используется напряжение между базой и эмиттером биполярного транзистора. 1,25 В — обычно используемый уровень выходного напряжения для BGR.
Вместо BGR в большем количестве электронного оборудования используется блок опорного напряжения на основе CMOS. Эталонный блок на основе КМОП использует разницу между пороговыми напряжениями двух МОП-транзисторов в качестве опорного напряжения. Он имеет небольшой размер схемы и чрезвычайно низкий ток питания. Его уровень выходного напряжения составляет примерно от 0,6 до 1,0 В. Он изображен на рисунке 3 символом батареи.
Блоки опорного напряжения могут поддерживать определенный уровень напряжения, несмотря на колебания входного напряжения или изменения температуры окружающей среды. Благодаря блоку опорного напряжения, поддерживающему определенный уровень опорного напряжения, линейные регуляторы могут выдавать фиксированное напряжение.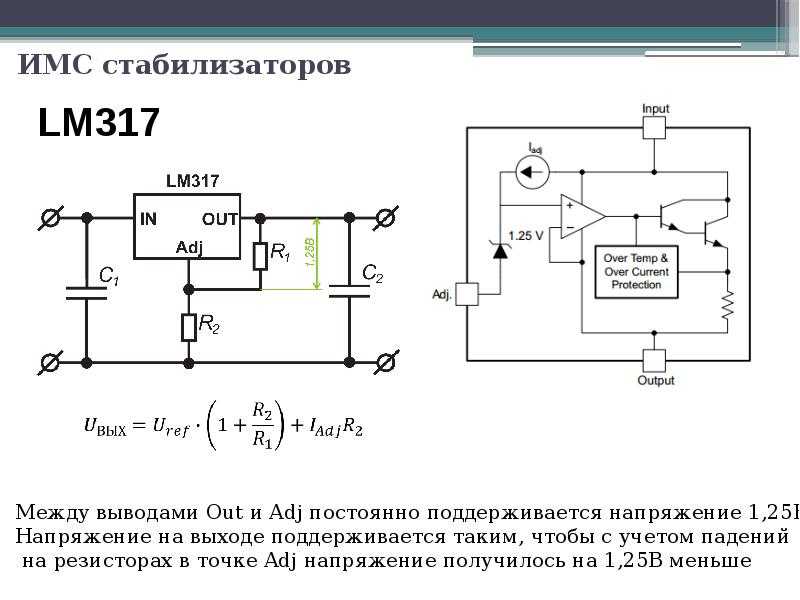
4. Усилитель ошибки
Усилитель ошибки — это разновидность операционного усилителя, который усиливает разность напряжений между двумя входными клеммами (положительной и отрицательной) и выдает усиленное напряжение.
Внутри линейного регулятора положительный вывод получает напряжение обратной связи, а отрицательный вывод получает опорное напряжение. Ошибка между двумя напряжениями усиливается внутри операционного усилителя, и усиленное напряжение выводится на переменный резистор. Вот почему компонент называется усилителем ошибки.
Таким образом, линейные регуляторы включают цепь отрицательной обратной связи, которая состоит из четырех компонентов, упомянутых выше, и обеспечивают постоянное выходное напряжение за счет управления отрицательной обратной связью *2 . Управление с отрицательной обратной связью сравнивает напряжение обратной связи с опорным напряжением и регулирует сопротивление транзистора выходного драйвера так, чтобы разница стала равной нулю.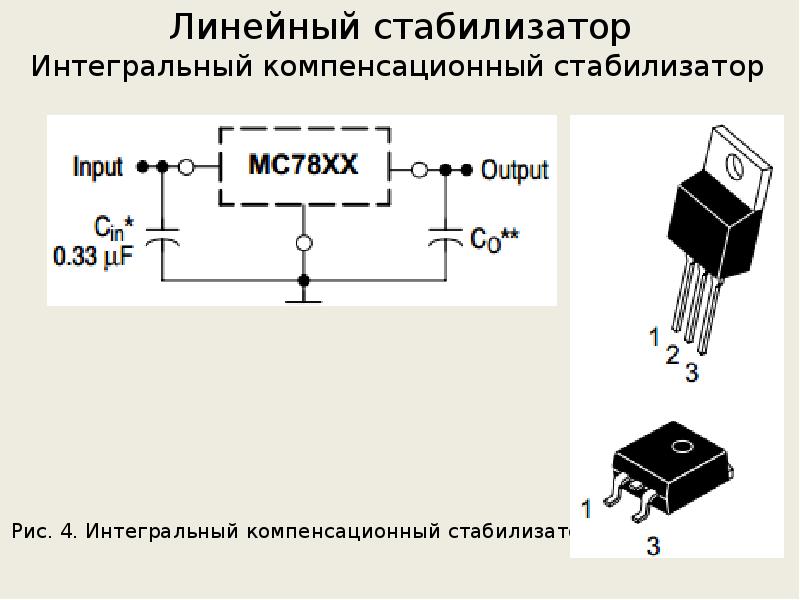
Соответственно, в нормальном состоянии VREF и VFB остаются равными.
Связь может быть представлена следующим уравнением:
VFB = VREF … [1]
VFB = VOUT × R2 / (R1 + R2) … [2]
Включить уравнение [1] для VFB в уравнение [2]:
VREF = VOUT × R2 / (R1 + R2) … [3]
∴ VOUT = VREF × (R1 + R2) / R2
Это уравнение не учитывает ни входное напряжение, ни ток нагрузки (сопротивление нагрузки). ). Это означает, что выходное напряжение определяется просто опорным напряжением и отношением сопротивлений напряжения обратной связи в нормальном состоянии.
Согласно этому уравнению также можно сказать, что опорное напряжение (VREF) является ключевым компонентом, определяющим характеристики линейного регулятора.
Также не имеет значения вариабельность значений сопротивлений, т.к. выходное напряжение определяется отношением сопротивлений R1 и R2. Поскольку резисторы изготавливаются и размещаются на довольно малой площади внутри полупроводниковой микросхемы, соотношение сопротивлений становится очень точным.
Тогда как линейные регуляторы управляют сопротивлением управляющего транзистора, чтобы обеспечить стабильное выходное напряжение, даже когда ток нагрузки (сопротивление нагрузки) или входное напряжение колеблются?
Механизм можно объяснить с точки зрения сопротивления выходного драйвера во включенном состоянии и коэффициента сопротивления выходной нагрузки.
Возьмем пример линейного регулятора, технические характеристики которого следующие: опорное напряжение 1 В, одинаковое сопротивление между R1 и R2 и выходное напряжение 2 В. В случае входа 5 В и тока нагрузки 200 Ом. Ом, регулятор регулирует сопротивление своего выходного драйвера до 300 Ом. Другими словами, регулятор управляет соотношением между сопротивлением включения драйвера и сопротивлением нагрузки, чтобы разделить выходное напряжение на 3:2.
- Случай колебания тока нагрузки
Как насчет случая, когда сопротивление нагрузки изменяется с 200 до 20 Ом? Регулятор регулирует сопротивление выходного драйвера в диапазоне от 300 Ом до 30 Ом, чтобы поддерживать соотношение сопротивлений на уровне 3:2 и выдавать предварительно установленное напряжение 2 В.

- Случай колебаний входного напряжения
Тогда как насчет случая, когда входное напряжение изменяется с 5 В до 4 В? Выходное напряжение станет равным 1,6 В, если будет сохранено исходное отношение сопротивлений. Чтобы поддерживать стабильные 2 В, регулятор регулирует не только сопротивление выходного драйвера от 300 Ом до 200 Ом, но и соотношение сопротивлений от 3:2 до 1:1.

Как показано выше, линейные стабилизаторы могут обеспечивать стабильное выходное напряжение даже при колебаниях тока нагрузки или входного напряжения. Уровень выходной стабильности определяется как линейным регулированием, так и регулированием нагрузки. Ниже подробное объяснение.
Линейное регулирование (ΔV OUT /ΔV IN ): макс. 0,2%/В (V SET + 0,5 В < V IN < 5 В)
Регулирование нагрузки (ΔV OUT /ΔI OUT ): ±40 мВ (1,5 В ≤ I OUT ≤ 100 мА)
Работа линейных регуляторов
В соответствии с рисунком 4 проверим схему внутренней работы линейного регулятора при изменении сопротивления его выходной нагрузки.
Работа линейного регулятора при колебаниях нагрузки
Рис. 4. Работа линейного регулятора при колебаниях тока нагрузки
По мере уменьшения сопротивления нагрузки и увеличения тока нагрузки выходное напряжение и напряжение обратной связи уменьшаются одновременно. Выходное напряжение усилителя ошибки также уменьшается по мере того, как напряжение обратной связи становится ниже опорного напряжения, что в результате снижает сопротивление драйвера во включенном состоянии. Уменьшение сопротивления выходного драйвера в открытом состоянии в соответствии с увеличением тока нагрузки, следовательно, приводит к тому, что выходное напряжение восстанавливает свое заданное значение. При возвращении выходного напряжения к заданному значению напряжение обратной связи совпадает с опорным напряжением.
Наоборот, уменьшение тока нагрузки увеличивает выходное напряжение усилителя ошибки и сопротивления включения драйвера, поскольку повышается выходное напряжение и напряжение обратной связи. Увеличение сопротивления включения драйвера в соответствии с уменьшением тока нагрузки приводит к тому, что выходное напряжение возвращается к заданному значению.
Увеличение сопротивления включения драйвера в соответствии с уменьшением тока нагрузки приводит к тому, что выходное напряжение возвращается к заданному значению.
LDO-регуляторы
Кстати, некоторые линейные регуляторы относятся к LDO-регуляторам. LDO — это сокращение от Low DropOut. Что означает «низкий отсев»?
Рисунок 5. Что означает «LDO»?
Спецификация линейного регулятора определяется как падение напряжения (VDIF). Падение напряжения относится к минимальной разнице между входным и выходным напряжениями, необходимой для того, чтобы линейные регуляторы генерировали заданное выходное напряжение в пределах допустимого диапазона *3 . Линейные стабилизаторы не смогут поддерживать установленное выходное напряжение, и выходное напряжение упадет, когда разница между входным и выходным напряжениями станет меньше, чем падение напряжения.
Возьмем в качестве примера линейный регулятор, получающий электричество от батареи. Если входное напряжение линейного регулятора превышает сумму установленного выходного напряжения и напряжения падения, регулятор может обеспечить стабильное выходное напряжение. Соответственно, чем меньше падение напряжения линейного регулятора, тем дольше становится время работы батареи.
Соответственно, чем меньше падение напряжения линейного регулятора, тем дольше становится время работы батареи.
Тогда как насчет линейного регулятора, напряжение источника которого подается от преобразователя постоянного тока? Преобразователь постоянного тока настроен на выходное напряжение, немного превышающее сумму выходного напряжения и напряжения падения линейного регулятора. В этом случае, по сравнению с использованием линейного стабилизатора с падением напряжения 0,4 В, регулятор с падением напряжения 0,2 В может вдвое уменьшить потери мощности. Короче говоря, использование регулятора с низким падением напряжения может снизить потери мощности.
Помните, что замена линейного стабилизатора на стабилизатор с падением напряжения 0,2 В не может снизить потери мощности без регулировки установленного выходного напряжения преобразователя постоянного тока в постоянный.
Это преимущество отличает линейные стабилизаторы от регуляторов с малым падением напряжения или просто стабилизаторы LDO. Однако стандартного определения LDO не существует, поэтому оно отличается от компании к компании. Поэтому во многих случаях LDO используется как краткое обозначение любых линейных регуляторов.
Однако стандартного определения LDO не существует, поэтому оно отличается от компании к компании. Поэтому во многих случаях LDO используется как краткое обозначение любых линейных регуляторов.
Напряжение отпускания и выходной ток
Случай 3,0 В выходного LDO с максимальным напряжением отпускания 0,23 В (Iвых = 150 мА)
Рисунок 6. Изображение напряжения отпускания и выходного тока состояние выхода. Например, на рис. 6 показано падение напряжения при выходном токе 150 мА. Как было сказано выше, драйверный транзистор представляет собой разновидность переменного резистора. Затем давайте подумаем о соотношении между падением напряжения и выходным током по закону Ома, рассматривая драйвер как резистор.
В этом примере минимальное значение падения напряжения составляет 0,23 В, а состояние выходного тока в этот момент составляет 0,15 А. По закону Ома сопротивление драйвера рассчитывается следующим образом:
R = V/I = 0,23/0,15 = 1,53 Ом
Этот расчет предполагает минимальное сопротивление драйвера LDO-регулятора.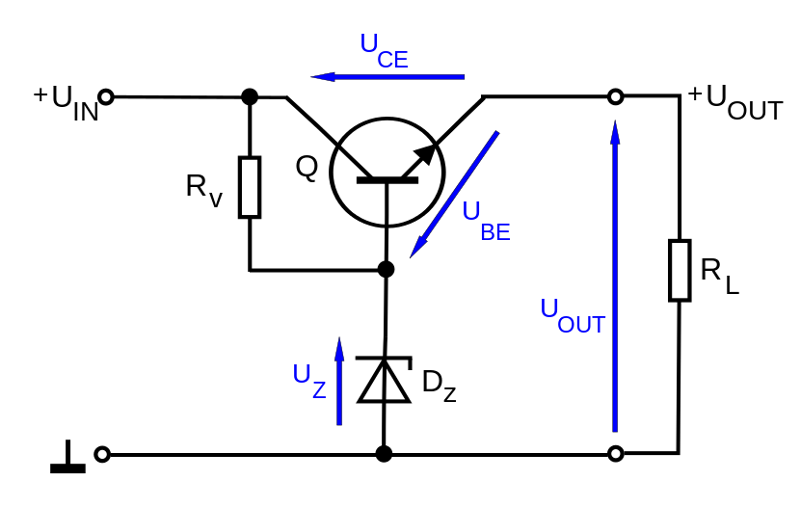
Далее, исходя из этого сопротивления, рассчитаем допустимый выходной ток при разнице входного и выходного напряжения 0,1 В.
I = V/R = 0,1/1,53 = 0,0652 А
Результат расчета показывает, что для поддержания выходного напряжения 3,0 В при входном напряжении 3,1 В выходной ток этого LDO-регулятора должен быть ниже 65 мА. Это также означает, что если этот LDO-регулятор выдает 150 мА при входном напряжении 3,1 В, выходное напряжение будет 2,87 В. Это приведет к тому, что выходное напряжение будет ниже входного на 0,23 В, а установленное выходное напряжение на 0,13 В.
Рисунок 7 иллюстрирует зависимость между входным и выходным напряжением в виде графика.
Рисунок 7. Зависимость между падением напряжения и выходным током
В соответствии с приведенным выше расчетом, параллельное подключение транзистора драйвера может сделать этот LDO-регулятор выходным током 150 мА при 3,1 В, так как он может уменьшить вдвое сопротивление драйвера в открытом состоянии и удвоить выходной ток.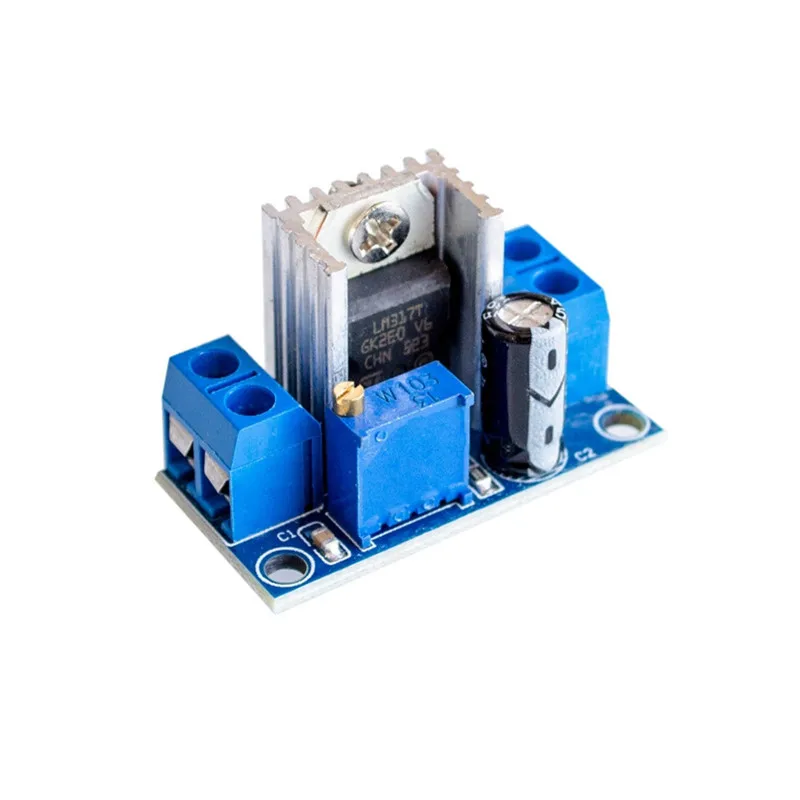
Однако, как видно из рисунка 8, фотографии схемы LDO-регулятора, большую часть площади микросхемы занимает драйвер.
Чтобы удвоить выходной ток или уменьшить вдвое падение напряжения, потребуется уменьшить сопротивление. Этого можно добиться, соорудив два транзистора драйвера параллельно в этом ограниченном пространстве.
Параллельное построение двух драйверов означает удвоение площади драйвера и площади чипа, что приводит к увеличению цены. Должен быть баланс между спецификациями регулятора и ценой.
Рис. 8. Фотография микросхемы регулятора LDO общего назначения
Заключение
В этой лекции мы объяснили механизм того, как линейный регулятор поддерживает стабильное выходное напряжение независимо от входного напряжения или колебаний тока нагрузки.
Таким образом, линейный регулятор контролирует выходное напряжение и поддерживает стабильное выходное напряжение с помощью цепи отрицательной обратной связи, которая регулирует внутреннее сопротивление драйвера во включенном состоянии. Этот механизм позволяет линейному регулятору выдавать стабильное выходное напряжение, даже когда колебания входного напряжения или тока нагрузки вызывают разрыв между выходным напряжением и заданным напряжением.
Этот механизм позволяет линейному регулятору выдавать стабильное выходное напряжение, даже когда колебания входного напряжения или тока нагрузки вызывают разрыв между выходным напряжением и заданным напряжением.
Кроме того, мы представили некоторые характеристики, которые показывают стабильность выхода линейного регулятора, такие как регулировка входа, регулировка нагрузки и падение напряжения, которые необходимы для поддержания стабильного выходного напряжения.
Эти спецификации не зависят от времени.
Далее мы объясним характеристики, зависящие от времени, ограничение рассеиваемой мощности для обеспечения стабильной работы линейных регуляторов, роль входных и выходных конденсаторов и т.д.
Спасибо за прочтение!
Примечания
- *1 Нагрузочное устройство — это такое устройство, которое работает со стабильным напряжением, подаваемым от ИС управления питанием и от источника питания. Здесь мы рассматриваем одно или несколько нагрузочных устройств вместе как резистор, а ток, протекающий к нагрузке, называется током нагрузки.
- *2На примере автомобиля, движущегося по поднимающемуся склону со скоростью 100 км/ч, будет легче понять управление с отрицательной обратной связью. Чтобы сохранить эту скорость, водитель нажимает на акселератор, чтобы увеличить мощность двигателя, наблюдая за спидометром. Если скорость превышает 100 км/ч, водитель снизит ее, сбавив педаль акселератора, чтобы уменьшить мощность двигателя. Также водитель увеличит скорость, если скорость упадет ниже 100 км/ч. Это также своего рода управление с отрицательной обратной связью, поскольку водитель регулирует мощность двигателя в противоположных направлениях в зависимости от скорости, которую он контролирует.
Вернемся к исходной теме. Замена следующих слов позволит вам понять управление с отрицательной обратной связью, используемое в линейном регуляторе.- мощность двигателя = выходное сопротивление драйвера во включенном состоянии
- 100 км/ч = опорное напряжение
- спидометр = напряжение обратной связи или выходное напряжение
- драйвер = усилитель ошибки
- наклон нарастания = величина тока нагрузки
Кроме того, если угол наклона подъёма уменьшить вдвое, водитель сможет поддерживать скорость 100 км/ч, уменьшив вдвое мощность двигателя. Это то же управление, что и линейный стабилизатор для поддержания стабильного выходного напряжения: когда ток нагрузки удваивается, линейный регулятор вдвое уменьшает сопротивление выходного драйвера во включенном состоянии и удваивает мощность управления по току; когда ток нагрузки уменьшается вдвое, линейный регулятор удваивает сопротивление во включенном состоянии и вдвое уменьшает токовую мощность. - *3 Чтобы отличить падение напряжения как характеристику стабилизатора LDO от литературного значения разницы между входным и выходным напряжениями ИС, в описании используется термин «напряжение падения».
 Кроме того, если угол наклона подъёма уменьшить вдвое, водитель сможет поддерживать скорость 100 км/ч, уменьшив вдвое мощность двигателя. Это то же управление, что и линейный стабилизатор для поддержания стабильного выходного напряжения: когда ток нагрузки удваивается, линейный регулятор вдвое уменьшает сопротивление выходного драйвера во включенном состоянии и удваивает мощность управления по току; когда ток нагрузки уменьшается вдвое, линейный регулятор удваивает сопротивление во включенном состоянии и вдвое уменьшает токовую мощность.
Кроме того, если угол наклона подъёма уменьшить вдвое, водитель сможет поддерживать скорость 100 км/ч, уменьшив вдвое мощность двигателя. Это то же управление, что и линейный стабилизатор для поддержания стабильного выходного напряжения: когда ток нагрузки удваивается, линейный регулятор вдвое уменьшает сопротивление выходного драйвера во включенном состоянии и удваивает мощность управления по току; когда ток нагрузки уменьшается вдвое, линейный регулятор удваивает сопротивление во включенном состоянии и вдвое уменьшает токовую мощность.Основные сведения об ИС управления питанием
- Vol. 1
Что такое ИС управления питанием? - Том. 2
Что такое линейный регулятор (регулятор LDO)? часть 1 - Том. 3
Что такое линейный регулятор (регулятор LDO)? Часть 2 - Том. 4
Что такое линейный регулятор (регулятор LDO)? Часть 3 - Том. 5
Что такое преобразователь постоянного тока в постоянный? Часть 1 НОВИНКА
 3
3 Профиль автора
Преподаватель S (Nissinbo Micro Devices Inc.)
С тех пор, как он присоединился к компании, он долгое время занимался различными аналоговыми и цифровыми разработками, такими как логические матрицы, микрокомпьютеры, память и ИС управления питанием. . После этого он также освоил технологию испытаний составных ИС источников питания и стал специалистом по проектированию, испытаниям и обучению по своей специальности. Его простые для понимания объяснения и вежливое руководство с точки зрения слушателя хорошо воспринимаются новыми инженерами, которые ежегодно приходят в нашу компанию. Его достижения высоко оценены, и сейчас он работает старшим инженером по обучению подрастающего поколения и консультантом по новым технологиям.