
В чем разница между коллекторными и бесколлекторными моторами?
Внедрение робототехники даже в детские игрушки ставит разработчиков перед выбором – какой тип двигателя выбрать для своего приложения? Выбор довольно сложен, если учитывать специфику машин и приложений.
Коллекторный двигатель
Коллекторный двигатель – это двигатель, оснащенный щетками, или же щеточно-коллекторным узлом, который и отвечает за приведение в движение данного механизма. Иными словами, коллектор – это совокупность нескольких контактов. Коллекторный двигатель достаточно прост в управлении, а источником питания для него может быть как батарея, так и аккумулятор.
Преимущества коллекторного двигателя заключаются в следующих качествах:
- он имеет сравнительно небольшой вес и компактный размер;
- его стоимость значительно ниже стоимости бесколлекторного двигателя;
- коллекторный двигатель пригоден к ремонту.

Но наряду с преимуществами, данный вид двигателя имеет и недостатки:
- коэффициент полезного действия коллекторного двигателя не превышает 50-60%;
- слишком быстрый износ двигателя за счет высокой скорости трения его щеток.
Скорость работы коллекторного двигателя одновременно является и преимуществом данного типа механизма, и его недостатком. С одной стороны, она позволяет проводить работу на высоких оборотах, но с другой – становится причиной перегрева мотора и дальнейшего выхода его из строя.
Делаем выбор
Решение о выборе типа двигателя является простым и сложным одновременно. Даже при существовании основных принципов выбора могут возникнуть ситуации, которые будут исключением из правил. Каждый тип двигателя отличается характеристиками скорости, угла поворота против крутящего момента, остановки. При выборе необходимо сопоставить желаемые функции и ограничения готового устройства с параметрами двигателя.
В большинстве случаев коллекторный и бесколлекторный двигатели не подходят для решений, в которых необходим шаговый вариант.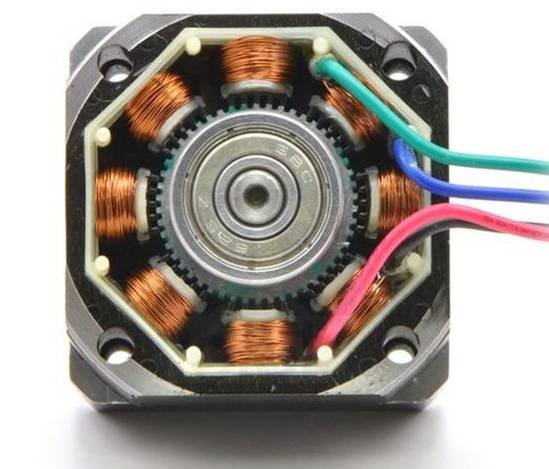 Он лучше подходит для постоянного чередования запуска/остановки/позиционирования, в то время как первые два более пригодны для непрерывной работы. При выборе между коллекторным и бесколлекторным двигателями рассмотрите следующие аспекты:
Он лучше подходит для постоянного чередования запуска/остановки/позиционирования, в то время как первые два более пригодны для непрерывной работы. При выборе между коллекторным и бесколлекторным двигателями рассмотрите следующие аспекты:
- коллекторные двигатели имеют меньший срок службы, чем двигатели BLDC; в первом случае срок службы зависит от износа подшипников и щеточного механизма, во втором срок ограничен только износом подшипников. Кроме того, щетки, быстро собирающие проводящую пыль, могут загрязнять другие поверхности;
- высококачественные коллекторные двигатели могут достигать скорости 10 000 об/мин, в то время как конструкции двигателей BLDC позволяют увеличить эту скорость в 5 или даже в 10 раз;
- коллекторные двигатели могут работать непосредственно от источника питания и, следовательно, нуждаются только в двух проводах, в то время как двигатели BLDC нуждаются в электронной коммутации, и в этом случае необходимо не менее трех проводов плюс провода датчика;
- КПД обоих типов примерно одинаков, а вот источники потерь в них различаются. Для коллекторных двигателей большая их часть возникает в обмотках и при трении, связанном со щеточным механизмом, в то время как двигатели BLDC испытывают те же потери в обмотках, плюс дополнительные потери от вихревых токов, которые растут с увеличением скорости;
- схема управления для шаговых двигателей изначально является гораздо более сложной, чем для коллекторных, но новые интегральные схемы, например, разработки STMicroelectronics, практически устраняют эти различия;
- маломощный коллекторный двигатель, например, для недорогой игрушки, может быть наиболее экономичным решением в плане электропроводки и электроники управления (если она есть), но при этом он может обеспечить весьма ограниченную производительность.
 Для коллекторных двигателей большая их часть возникает в обмотках и при трении, связанном со щеточным механизмом, в то время как двигатели BLDC испытывают те же потери в обмотках, плюс дополнительные потери от вихревых токов, которые растут с увеличением скорости;
Для коллекторных двигателей большая их часть возникает в обмотках и при трении, связанном со щеточным механизмом, в то время как двигатели BLDC испытывают те же потери в обмотках, плюс дополнительные потери от вихревых токов, которые растут с увеличением скорости;Вы здесь
Главная » Блог » Коллекторный или бесколлекторный двигатель радиоуправляемой модели, выбираем электродвигатель машины на р/у или квадрокоптера.
Опубликовано: 28 августа 2014
Всем привет, сегодня мы расскажем о разнице между коллекторным и бесколлекторными двигателями.
Перед покупкой радиоуправляемой модели с электроприводом, необходимо определиться с выбором электродвигателя, которые бывают двух типов: коллекторные и бесколлекторные двигатели.
Основная разница для потребителя:
коллекторные двигатели более дешевые, но модели с такими двигателями развивают меньшую скорость. Бесколлекторные двигатели – более дорогие, но способны развить большую скорость, а также более износостойкие. Далее немного подробнее:
Двигатель для квадрокоптера: как выбрать, в чем разница и где заказать
Доброго времени суток, дорогой читатель. Сегодня мы поговорим о том, что поднимет твой летательный аппарат на новые высоты… ну или хоть на какие-то. Речь пойдёт об электромоторах. Я расскажу тебе о том, как выбрать двигатель для квадрокоптера твоей мечты, и о многих других нюансах, связанных с этой темой. Поехали!
Коллекторные vs бесколлекторные
Первым, с чем ты столкнёшься при выборе будут эти два термина. Это две разных реализации двигателей. Главное отличие – расположение обмотки.
Это две разных реализации двигателей. Главное отличие – расположение обмотки.
Спонтанный ликбез:Статор – неподвижная (статичная) часть движка.
Ротор – вращающаяся (rotation) часть.
Коллекторные
Обладает щеточно-коллекторным узлом. Коллектор, это набор контактов (обмоток), расположенных на роторе, и щётка – скользящий контакт, расположенный на статоре.
Как раз наличие этой щётки и убавляет ресурс коллекторного мотора, ибо создаёт трение. Двигатель начинает вращаться при подаче на него постоянного тока, а направление вращения зависит от полярности оного.
Плавно разгоняются и замедляются.
Преимущества
- Маленький вес и размер
- Низкая стоимость
- Прост в ремонте
Недостатки
- Низкий КПД
- Низкая скорость вращения
- Перегрев
- Быстрый износ
Бесколлекторные (бесщёточного типа)
Состоит из ротора с постоянными магнитами и статора, с обмотками. Изменение направления вращения осуществляется изменением полярности (Нужно поменять два провода из трёх).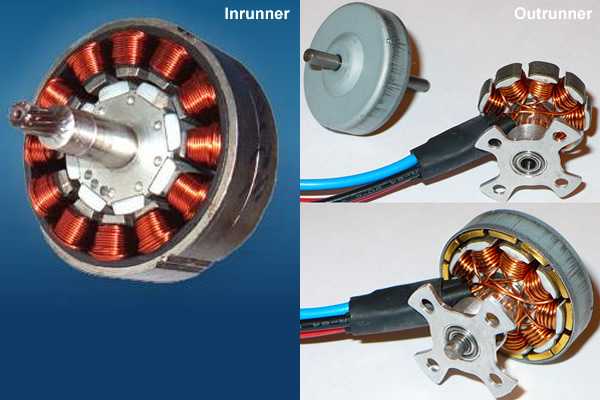 Разгон и замедление происходят очень быстро (рывком). Имеют разное количество полюсов. Чем их больше, тем медленнее, но с большим усилием, вращается ротор.
Разгон и замедление происходят очень быстро (рывком). Имеют разное количество полюсов. Чем их больше, тем медленнее, но с большим усилием, вращается ротор.
Преимущества
- Высокая скорость вращения
- Износостойкость
- Защищённость от внешних воздействий
Недостатки
Тут есть нюанс. Устройство двигателя бесколлекторного типа может отличаться.
- Inrunner – Стандарт. Ротор с постоянными магнитами вращается в статоре с обмотками.
- Outrunner – Нестандарт. Здесь ротором выступает корпус, который вращается вокруг статора с обмотками.
Мощность (потребляемая)
Измеряется в ваттах. Чем больше мощность, тем быстрее кончится батарея. Тут всё просто
Вес
Чем больше вес, тем мощнее и медленнее (обычно). Важно помнить, что вес самого движка нужно учитывать при расчёте веса, который он должен поднять.
Энергоэффективность (КПД)
Комплексное понятие, которое зависит ещё и от батареи, контроллера, пропеллера, и даже проводов. Тут подробно останавливаться не буду- чем выше, тем лучше. Двигатель с КПД 70% тратит 70% потреблённой энергии на полёт, а 30% на обогрев окружающей среды и приближение тепловой смерти вселенной. Для бесколлекторных нормой является 90%, а для коллекторных 70%.
Тут подробно останавливаться не буду- чем выше, тем лучше. Двигатель с КПД 70% тратит 70% потреблённой энергии на полёт, а 30% на обогрев окружающей среды и приближение тепловой смерти вселенной. Для бесколлекторных нормой является 90%, а для коллекторных 70%.
Температура нагрева в работе
Как ты уже понял- напрямую зависит от КПД. Чем больше греется, тем больше тратит энергии впустую.
Балансировка и уровень вибрации
По сути, это качество исполнения. Есть такая вещь как допуск. Этот те пределы, в которых отклонение от идеала не считается проблемой. Чем выше точность изготовления, тем более соосной будет система, и тем меньше будет вибраций. Иногда лучше не брать самое дешёвое.
Вибрация в двигателе ускоряет его износ, износ прочих деталей, раскручивает винтики и шумит. Неприятное явление.
Тяга
Тяга, она же подъёмная сила. Это тот вес, который может поднять двигатель (включая самого себя). Но это не значит, что для двухкилограммового квадрокоптера нужно четыре двигателя.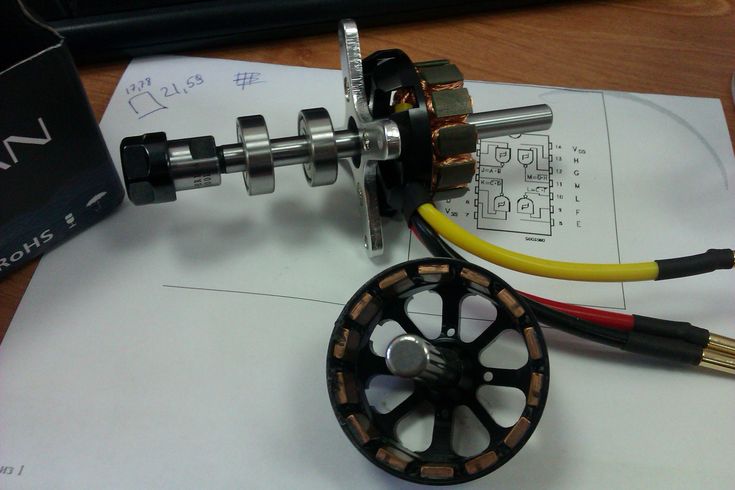 Нужен запас тяги, нужно учесть помехи, и банальную не идеальность моторов.
Нужен запас тяги, нужно учесть помехи, и банальную не идеальность моторов.
Формула будет примерно следующей.
Тяга одного мотора = (вес коптера * 2)/ кол-во движков В итоге, для квадрокоптера весом 1 кг нужно 4 двигателя с тягой 500 грамм.
KV
Это достаточно сложный параметр – обороты на вольт без нагрузки. То есть если мы имеем моторчик в 1000 kv, то при подключении его к источнику тока с напряжением 12 вольт, он выдаст 12 000 оборотов в минуту (KV*U). Однако, это всё крайне теоретически.
На практике есть нагрузка, которую создаёт пропеллер, и создаваемое им сопротивление воздуха. Из этого следует, что обороты будут ниже, или их не будет вообще, так как от КВ зависит крутящий момент. Чем выше параметр КВ, тем меньшее усилие развивает электродвигатель.
Для понимания процесса (грубый пример).
Так как электродвигатель работает из-за перемены полярности электромагнитов с определённой частотой, то кв, по сути, характеризует частоту, с которой изменяется полярность магнитов, к которым притягивается постоянный магнит. для простоты примем, что постоянный магнит на роторе. Если всё идёт по плану, то ротор проходит путь от одного переменного магнита до другого, после полярность меняется, и он идёт дальше.
для простоты примем, что постоянный магнит на роторе. Если всё идёт по плану, то ротор проходит путь от одного переменного магнита до другого, после полярность меняется, и он идёт дальше.
Если слишком часто менять полярность, или увеличивать нагрузку, то ротор просто не успеет разогнаться и преодолеть нужный путь, и его начнёт притягивать обратно, или же он вообще не сдвинется с места. Это похоже на пробуксовку колеса авто на льду. Чем выше скорость вращения и вес авто, тем больше оно будет проскальзывать, и меньшее усилие развивать.
В итоге, никто не знает сколько нужно, ибо параметр не поддаётся простому определению. Можно просто ориентироваться на следующие цифры. Лёгкий гоночный коптер с маленькими пропеллерами имеет KV 2100—2500, а для тяжёлых, многокилограммовых аппаратов нужно брать что-то в районе 200-900 KV.
Как правильно выбрать
Есть несколько основных параметров, исходя из которых придётся выбирать. О них ниже. Прежде всего, советую перейти на сайт калькулятора Ecalc, и ознакомиться с калькулятором. Он позволит как подобрать примерную комплектацию коптера, так и рассчитать полётных характеристики уже готовой сборки. Расчёт моторов стоит начать именно с него.
Он позволит как подобрать примерную комплектацию коптера, так и рассчитать полётных характеристики уже готовой сборки. Расчёт моторов стоит начать именно с него.
Общий вес и необходимая тяга
Это пункт планировки, и возможно важнейшие характеристики. Нужно чётко понимать – сколько будет весить квадрокоптер. В общий вес идёт всё, включая пропеллеры, провода и полезную нагрузку. Исходя из формулы расчёта тяги, для достижения хороших полётных характеристик, двигатели твоего коптера должны поднимать его вес, помноженный на два.
Размер рамы и пропеллера
От размера и конфигурации рамы зависит то, сколько двигателей тебе придётся поставить, и на сколько большую диагональ пропеллеров ты сможешь использовать. Сейчас не буду вдаваться в подробности конфигурации, и рассказывать о том, как правильно подобрать раму. Просто напомню, что это ответственный узел, и на нём будет держаться всё, в том числе и тяжёлые, вибрирующие двигатели.
Запомни три простых правила.
- Тут важно не промахнуться с размером. Пропеллеры не должны наслаиваться. Проблемы доставляет и путаница с размерами. Добро пожаловать в мир дюймов
- Жёсткость рамы и её вес очень важны. Если есть возможность, то бери с запасом по прочности. Очень хорошо тебя показывают композитные материалы (карбоновая рама – предел мечтаний)
- Резьбы в пластике или вообще не могут считаться за резьбы, или являются одноразовыми. Ищи или металлические вставки, или думай, как ещё зафиксировать болты
 Пропеллеры не должны наслаиваться. Проблемы доставляет и путаница с размерами. Добро пожаловать в мир дюймов
Пропеллеры не должны наслаиваться. Проблемы доставляет и путаница с размерами. Добро пожаловать в мир дюймовОт размера лопастей зависит поведение дрона в воздухе. Большая диагональ даст большую подъёмную силу и устойчивость, в ущерб маневренности, и наоборот. Здесь надо отталкиваться от своей цели. Так же нужно учитывать то, что пропеллер создаёт нагрузку на двигатель. Обычно рекомендованный размер будет указан в спецификации.
Питание
Рекомендуемый аккумулятор тоже можно подсмотреть в спецификации. Обычная банка имеет номинальное напряжение 3.7в. При последовательном соединении суммируется напряжение, а при параллельном – ёмкость (она же время полёта).
Это значит, что если ты видишь рекомендованный аккумулятор 2-3S Li-po (7,4-11,1V), то тебе потребуется два, или три последовательно соединённых литий-полимерных аккумулятора и соответствующая плата питания. В этом диапазоне всё будет работать (конечно, чем меньше- тем слабее).
Параллельно можно суммировать только одинаковые блоки, но зато сколько душе угодно.
Маркировка двигателей для квадрокоптеров
На самом деле стандарта нет. Каждый лепит на свою продукцию что захочет. К счастью, есть общепринятые нормы, которые соблюдает большинство.
Первая буква отражает качество изготовления.
- «V» серия специально для ответственных мультикоптеров, изготовлена из лучших материалов при высочайшей точности сборки. Обычно, это гоночные электродвигатели, которые вращаются намного быстрее обычных
- «X» серия для моделей самолётов и мультикоптеров – середнячков. Хороший КПД, качество и сборка по терпимой цене
- «A» серия – Бюджетное решение, которое будет чуть хуже, чем предыдущие, но всё так же будет хорошо работать. Не стоит её пугаться
 Не стоит её пугаться
Не стоит её пугатьсяПервые четыре цифры, это параметры магнитопровода. Первые две –диаметр, вторые две –толщина набора. Они, на самом деле тебе не очень нужны. Не заморачивайся. Их тебе нужно знать в основном для того, чтобы понимать следующий параметр.
Спонтанный ликбез: Магнитопровод, это та часть двигателя или трансформатора, на которую намотана обмотка. Он набирается из пластин.
Количество витков
От количества витков зависит толщина провода, при равных параметрах магнитопровода. На один и тот же магнитопровод можно намотать 13 или 15 витков (к примеру).
Чем больше витков, тем меньше диаметр сечения провода и выше внутреннее сопротивление. Отсюда, при равном питающем напряжении, при большем количестве витков, ток и обороты будут ниже. Это подтверждается параметром KV.
Для бесщёточного двигателя с 15 витками оно будет ниже, чем у того же мотора, но с 13 витками.
Последняя буква – вид трёхфазного подключения – звезда или треугольник (Y/* или T/Δ соответственно). Снова не буду грузить электроникой, да и в случае с квадрокоптерами подключение не так важно.
Снова не буду грузить электроникой, да и в случае с квадрокоптерами подключение не так важно.
- Мотор подключенный через звезду будет более мягко и плавно разгоняться, но не сможет развить максимальную заявленную мощность
- Подключение через треугольник даст более резкий набор скорости и полную заявленную мощность, но потребует намного больший пусковой ток
Возьмём для разбора такую маркировку A2212/15T.
22 – магнитопровод диаметром 22мм12 — толщина набора 12мм15 – 15 витковА – Ширпотреб для бюджетных аппаратов
Т – (иногда заменяют на Δ) намотка типа дельта (треугольником)
Источник: https://DronGeek.ru/novichkam/vybiraem-dvigatel
Три основные топологии двигателя
Три часто используемые конфигурации маломощных DC-двигателей – коллекторные, бесколлекторные (BLDC) и шаговые. Каждый из них работает благодаря взаимодействию между токами в катушках (или обмотках) и постоянными магнитами (в большинстве конструкций), что приводит к притяжению/отталкиванию магнитного поля, вызывающему вращение. Все три вида двигателей имеют некоторые сходства, но отличаются методом управления переключением тока, протекающего через обмотки ротора и статора.
Все три вида двигателей имеют некоторые сходства, но отличаются методом управления переключением тока, протекающего через обмотки ротора и статора.
Они также отличаются возможностью выполнения определенных задач, качеством этого выполнения и гибкостью управления.
- Исторически первым был двигатель коллекторного типа. По мере вращения ротора контактные щетки, представляющие собой сплошные контакты, состоящие, как правило, из графита, касаются соответствующих областей на роторе (рисунок 1). По мере вращения ротора изменение точек контакта щетки вызывает изменение направления потока тока и, следовательно, магнитного поля. Затем взаимодействие магнитного поля между ротором и статором меняется на противоположное, что вынуждает ротор продолжать движение.
Рис. 1. Коллекторный двигатель постоянного тока
Данная механическая схема концептуально проста. Однако ее недостаток в том, что щетки изнашиваются и нуждаются в замене, реализация интеллектуального управления сложна, потому что переключить данный двигатель довольно трудно, к тому же, щетки создают электромагнитные помехи (EMI), также известные как радиочастотные помехи (RFI).
В простейшем варианте коллекторный двигатель не нуждается в электронном управлении – он просто работает в зависимости от токовой и механической нагрузок. В других вариантах силовая шина двигателя включается и выключается при помощи транзисторной схемы, что является простейшим вариантом управления. Также возможно использование микросхемы-драйвера для повышения производительности и обеспечения контроля над скоростью и вращательным моментом.
- В двигателе BLDC механическая коммутация заменена электрической с использованием транзисторов. Чаще всего используются МОП-транзисторы (MOSFET), которые управляются драйвером затвора (в некоторых конструкциях используются биполярные транзисторы с изолированным затвором – IGBT). Отдельный контроллер управляет точным переключением катушки в момент, необходимый для поддержания вращения двигателя на желаемой скорости (рисунок 2).
Рис. 2. Бесколлекторный двигатель постоянного тока
Примечание: двигатели BLDC иногда называют электронно-коммутируемыми (EC) двигателями, что является более точным определением.

В BLDC магнитное поле ротора присутствует всегда, оно генерируется постоянными магнитами. Когда ток направляется от одной фазы двигателя к другой, магнитные поля объединяются, генерируя изменяющееся поле статора.
Управление двигателем производится не только при помощи электроники. Вместо этого переключение может быть сформировано в драйвере затвора с контролируемым временем нарастания и спада для уменьшения EMI/RFI. Основная проблема заключается в том, что более мягкое переключение приводит к потере мощности и снижению КПД двигателя, и в этой ситуации разработчику необходимо найти максимально компромиссное решение. Некоторые новые драйверы затвора используют множество сложных и тонких трюков, чтобы облегчить эту задачу.
- Шаговый двигатель использует концепцию двигателя BLDC, включая в себя большое количество катушек (или полюсов), расположенных по периферии двигателя (рисунок 3). Путем поочередного включения и выключения этих полюсов индуцируется шаг и вращение ротора в прямом или обратном направлении.
Рис. 3. Шаговый двигатель
Полюсов может быть и 16, и 128 (или более), в зависимости от требуемой точности вращения, прямо пропорциональной их количеству. Шаговые двигатели доступны в однополярных двухфазных и биполярных двух-, трех- и пятифазных конфигурациях. Самый распространенный из них – биполярный двухфазный двигатель.
В шаговом двигателе магнитное поле ротора генерируется постоянным магнитом, а магнитное поле статора – током, протекающим в определенной фазе. В результате ротор будет выравниваться в соответствии с магнитным полем статора, чтобы достичь заданного положения.
Шаговый двигатель хорошо подходит для задач, где необходимы быстрые остановка/запуск, позиционирование или движение назад/вперед, однако он не подойдет для долговременной непрерывной работы. Он часто используется в принтерах и приборах с поэтапным позиционированием (это только два из его многочисленных применений). Несмотря на то, что точность позиционирования зависит от числа полюсов, использование усовершенствованного метода, в котором смежные полюсы включаются частично (так называемый «микрошаг»), позволяет более точно управлять переключением и позиционированием.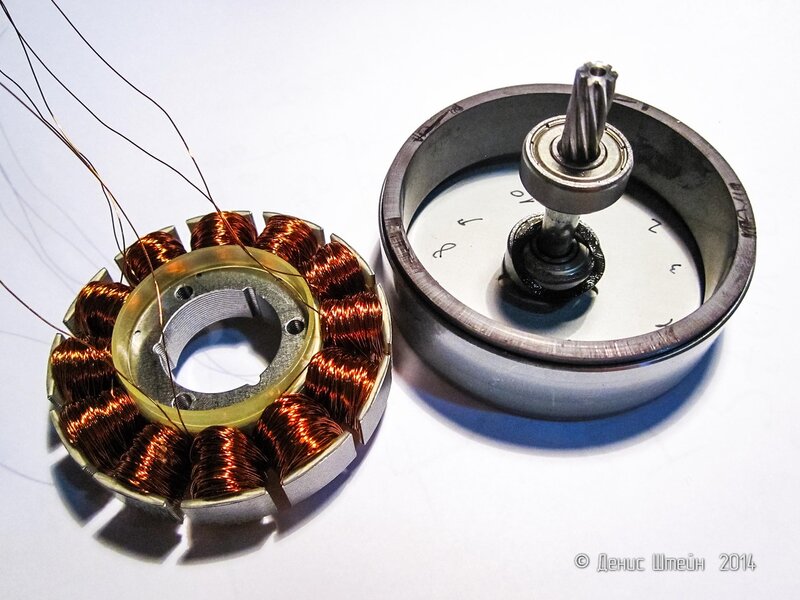
Отсутствие датчика
Для определения положения ротора необходимо проводить измерение напряжения на незадействованную обмотку. Данный способ применим при вращении двигателя, иначе он не будет действовать.
Бездатчиковые регуляторы хода изготавливаются легче, это объясняет их широкое распространение.
Контроллеры обладают следующими свойствами:
- значение максимального постоянного тока;
- значение максимального рабочего напряжения;
- число максимальных оборотов;
- сопротивление силовых ключей;
- импульсная частота.
При подключении контроллера важно делать провода, как можно короче. Из-за возникновения бросков тока на старте
Если провод длинный, то могут возникнуть погрешности определения положения ротора. Поэтому контроллеры продаются с проводом 12 — 16 см.
Контроллеры обладают множеством программных настроек:
- контроль выключения двигателя;
- плавное или жёсткое выключение;
- торможение и плавное выключение;
- опережение мощности и КПД;
- мягкий, жесткий, быстрый старт;
- ограничения тока;
- режим газа;
- смена направления.

Контроллер LB11880, изображенный на рисунке, содержит драйвер бесколлекторного двигателя мощной нагрузки, то есть можно запустить двигатель напрямую к микросхеме без дополнительных драйверов.
Принцип работы коллекторного мотора
Электрический ток (DC или direct current), поступая на обмотки якоря (в зависимости от их количества на каждую по очереди) создает в них электромагнитное поле, которое с одной стороны имеет южный полюс, а с другой стороны северный.
Многие знают, что, если взять два любых магнита и приставить их одноименными полюсами друг другу, то они не за что не сойдутся, а если приставить разноименными, то они прилипнут так, что не всегда возможно их разъединить.
Так вот, это электромагнитное поле, которое возникает в любой из обмоток якоря, взаимодействуя с каждым из полюсов магнитов статора, приводит в действие (вращение) сам якорь. Далее ток, через коллектор и щетки переходит к следующей обмотке и так последовательно, переходя от одной обмотки якоря к другой, вал электродвигателя совместно с якорем вращается, но лишь до тех пор, пока к нему подается напряжение.
В стандартном коллекторном моторе якорь имеет три полюса (три обмотки) – это сделано для того чтобы движок не «залипал» в одном положении.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока . Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателя
Статор имеет традиционную конструкцию и похож на статор асинхронной машины . Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов , так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический , индуктивный, на эффекте Холла , и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W
расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Бесколлекторные электродвигатели постоянного тока (BLDC)
В самом названии уже можно увидеть коренное различие между этими машинами. В BLDC машинах отсутствуют щетки, что делает их конструкцию заметно сложнее. Бесщеточная машина постоянного тока имеет четыре или более постоянных магнита в роторе.
В BLDC машинах отсутствуют щетки, что делает их конструкцию заметно сложнее. Бесщеточная машина постоянного тока имеет четыре или более постоянных магнита в роторе.
Эффективность – основная фишка данных машин. Поскольку ротор имеет постоянные магниты, он не нуждается в источнике напряжения, следовательно, нет физического подключения. Нет подключения – нет щеточно-коллекторного узла, соответственно, исчезают все проблемы связанные с ним. Но есть и минус – такой тип электрических машин должен иметь электронную систему управления положением ротора в пространстве. Для анализа поворотов машины и выработки управляющих импульсов в нужный момент используют микроконтроллер, а для отслеживания поворота вала в пространстве – поворотные датчики или датчики на основе эффекта Холла.
Электродвигатели BLDC представляют собой синхронные машины, что означает, что магнитные поля ротора и статора вращаются с одинаковой частотой. Они могут иметь одно-, двух- и трехфазные конфигурации.
Особенности конструкции
Для лучшего понимания данного вопроса следует подробнее рассмотреть, что легло в основу представленного устройства.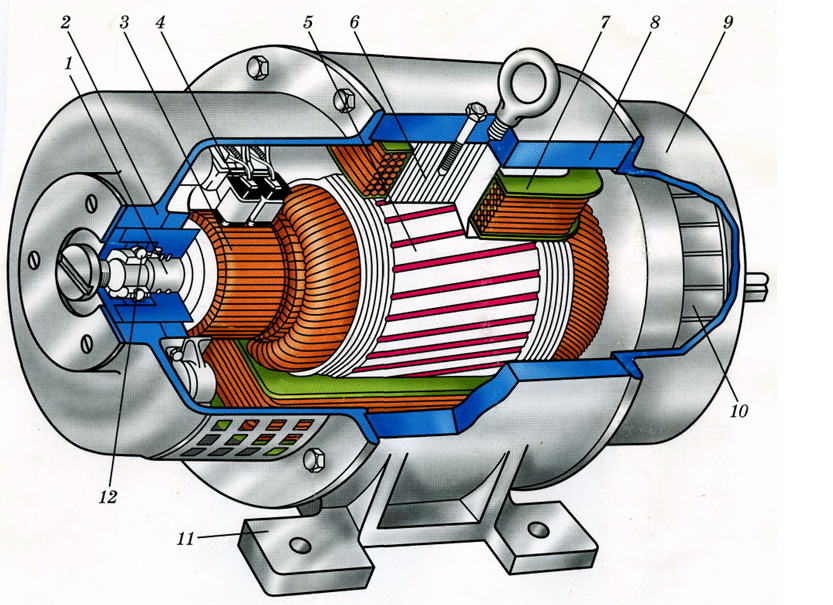 Тип электродвигателя коллекторный универсальный представляет собой прибор постоянного тока, имеющий последовательно включенные обмотки возбуждения, оптимизированные для работы на переменном токе бытовой сети электрического питания. Вращение двигателя происходит в одну сторону вне зависимости от полярности. Это связано с тем, что обмоток статора и ротора приводит к одновременной смене их магнитных полюсов, а благодаря этому результирующий момент направляется в одну сторону.
Тип электродвигателя коллекторный универсальный представляет собой прибор постоянного тока, имеющий последовательно включенные обмотки возбуждения, оптимизированные для работы на переменном токе бытовой сети электрического питания. Вращение двигателя происходит в одну сторону вне зависимости от полярности. Это связано с тем, что обмоток статора и ротора приводит к одновременной смене их магнитных полюсов, а благодаря этому результирующий момент направляется в одну сторону.
Бесколлекторные двигатели
Название электродвигателя говорит об отсутствии токосъемного устройства. Что является основной конструктивной разницей. Это позволяет снизить потери на трение и повысить мощность. При этом постоянные магниты смонтированы на роторе, а обмотки размещены на статоре.
Выпускаются бесколлекторные двигатели, у которых магниты смонтированы на корпусе. В этом случае корпус выполняет функцию ротора.
Для пуска двигателя требуется специальное устройство (контроллер или коммутатор), что увеличивает стоимость бесколлекторных электродвигателей.
Содержание
Все чаще на электроинструменте можно встретить надпись «Brushless motor». Это значит, что девайс оснащен бесщеточным электродвигателем постоянного тока. Действительно ли от этого есть толк или это очередная уловка маркетологов? Давайте разбираться на примере шуруповертов.
Мы будем говорить о шуруповертах как о наиболее востребованном электроинструменте в арсенале домашнего мастера (кто крутил саморезы отверткой, тот поймет). Но тезисы материала безоговорочно распространяются на весь электроинструмент, оснащенный бесщеточными двигателями.
Плюсы и минусы бесщеточного шуруповерта
Производители пишут, что основная изюминка бесщеточного шуруповерта — не нужно менять щетки, которых нет. Это на самом деле так, но так ли сложно поменять щетки?
За этим «жирным» плюсом притаился довольно коварный минус. Дело в том, что более-менее нагруженный шуруповерт потребует замены щеток на второй, а то и третий год работы. Проводя их замену, бережливый владелец наверняка заглянет и в другие узлы инструмента. Обратит внимание на состояние подшипников, очистит внутренности от пыли, заложит порцию свежей смазки — в общем, проведет полное техобслуживание инструмента. В случае с бесколлекторным инструментом, о необходимости сервисного обслуживания можно просто забыть и вспомнить о нем, когда шуруповерт начнет конкретно барахлить.
Обратит внимание на состояние подшипников, очистит внутренности от пыли, заложит порцию свежей смазки — в общем, проведет полное техобслуживание инструмента. В случае с бесколлекторным инструментом, о необходимости сервисного обслуживания можно просто забыть и вспомнить о нем, когда шуруповерт начнет конкретно барахлить.
Вот по-настоящему значимые преимущества бесщеточного инструмента:
- Высокий КПД. У бесщеточного двигателя он составляет порядка 90 %, в то время как у коллекторного мотора — на уровне 60 %. Это обусловлено отсутствием потерь на трение и искрообразование, и, как следствие, повышением температуры коллекторного узла якоря мотора.
- Быстрый выход на номинальную скорость вращения двигателя. В этом опять же заслуга высокого КПД BLDC мотора.
- При тех же массогабаритных показателях, с вала бесщеточного электродвигателя снимается большая мощность, а это влечет получение большего крутящего момента.
- Лучшая энергоэффективность. Благодаря отсутствию потерь в коллекторе и щеточном узле и более высокому КПД бесщеточный шуруповерт сделает больше полезной работы на одном заряде аккумулятора. Это важно профессионалам, для которых время — деньги. Эффективность бесщеточного шуруповерта в среднем выше на 25–40 % в сравнении с его коллекторным аналогом.
- Возможность использования во взрыво- и пожароопасных средах ввиду отсутствия искр на щеточном узле.
- Грамотная защита от перегрузки. Плата управления электродвигателем просто не позволит нагрузить инструмент сверх меры, а вот коллекторный шуруповерт при должном старании можно перегреть и получить дымок из вентиляционных отверстий.
 Это важно профессионалам, для которых время — деньги. Эффективность бесщеточного шуруповерта в среднем выше на 25–40 % в сравнении с его коллекторным аналогом.
Это важно профессионалам, для которых время — деньги. Эффективность бесщеточного шуруповерта в среднем выше на 25–40 % в сравнении с его коллекторным аналогом.Но бесщеточным инструментам присущи и некоторые недостатки:
- Высокая цена. Наличие в конструкции дорогой силовой платы управления BLDC мотором ощутимо увеличивает стоимость шуруповерта.
- Плохая ремонтопригодность. В бесщеточном шуруповерте плата управления, кнопка включения инструмента и статор электродвигателя обычно идут единым блоком. Стоимость запчасти — от 2/3 до 3/4 стоимости нового инструмента. Если поломка произойдет по истечении гарантийного срока, то ремонтировать такой шуруповерт вряд ли целесообразно. В отличие от коллекторных экземпляров, где можно заменить кнопку или электродвигатель отдельно, и стоить это будет на порядок дешевле.
 В отличие от коллекторных экземпляров, где можно заменить кнопку или электродвигатель отдельно, и стоить это будет на порядок дешевле.
В отличие от коллекторных экземпляров, где можно заменить кнопку или электродвигатель отдельно, и стоить это будет на порядок дешевле.Впускные коллекторы с изменяемой геометрией
Отдельного внимания заслуживает система изменения геометрии впускного коллектора.
Двигатели с переменной длиной впускного тракта
Импульсные движения во впускном коллекторе, безусловно, помогают его работе, но процесс запускается только в диапазоне определенных частот колебаний. Длина импульса пропорциональна длине трубы коллектора. Такой принцип используется во впускных коллекторах с изменяемой длиной. Электронный блок управления двигателем контролирует число оборотов и подает сигнал на клапан для включения «малого» либо «большого» круга подачи смеси.
Устройство коллекторов с изменением сечения каналов
В случае изменения сечения впускного коллектора по ходу движения топливной смеси установлены заслонки, которые в закрытом положении не перекрывают полностью продвижение смеси, а уменьшают просвет коллектора. Изменение сечения потока приводит к завихрениям и увеличению их скорости. Управление такими устройствами осуществляет бортовой компьютер.
Изменение сечения потока приводит к завихрениям и увеличению их скорости. Управление такими устройствами осуществляет бортовой компьютер.
Пример реализации коллектора с изменяемым сечением дизельного и бензинового двигателей
Впускные коллекторы с системой рециркуляции отработанных газов
Впускные коллекторы с системами EGR Exhaust Gas Recirculatiоn (система рециркуляции отработанных газов) предназначены для уменьшения токсичных выбросов в атмосферу. Подобные конструкции коллекторов устанавливаются как на бензиновые, так и на дизельные двигатели. Принцип действия прост — отработанные газы из выхлопной системы через отдельный клапан попадают обратно во впускной коллектор, благодаря чему понижается содержание кислорода в топливовоздушной смеси, а значит, понижается интенсивность окисления и температура в камерах сгорания. Система включается только в определенных режимах, например, на холостом ходу.
Теги
Бесколлекторный двигательДвигательДвигатель постоянного токаКоллекторный двигатель постоянного токаШаговый двигательЭлектродвигатель
На сайте работает сервис комментирования DISQUS, который позволяет вам оставлять комментарии на множестве сайтов, имея лишь один аккаунт на Disqus. com.
com.
В случае комментирования в качестве гостя (без регистрации на disqus.com) для публикации комментария требуется время на премодерацию.
Другие сравнения
При сопоставлении коллекторных и асинхронных двигателей одинаковой мощности, вне зависимости от номинальной частоты последних, получается разная характеристика. Далее это будет описано подробнее. Универсальный коллекторный электродвигатель реализует «мягкую» характеристику. В данном случае момент прямо пропорционален нагрузке на валу, при этом обороты обратно пропорциональны ей. Номинальный момент обычно меньше максимального в 3-5 раз. Ограничение оборотов холостого хода характеризуется исключительно потерями в двигателе, при этом при включении мощного агрегата без нагрузки он может разрушиться.
Характеристикой асинхронного двигателя является «вентиляторная», то есть агрегат поддерживает частоту вращения, приближенную к номинальной, увеличивая момент максимально резко при незначительном снижении оборотов. Если речь идет о значительном изменении этого показателя, то момент двигателя не только не растет, но и падает до нулевой отметки, что приводит к полной остановке. Обороты холостого хода немного превышают номинальные, при этом остаются постоянными. Характеристикой однофазного асинхронного двигателя является дополнительный набор проблем, сопряженных с запуском, так как он не развивает пускового момента в нормальных условиях. Магнитное поле однофазного статора, пульсирующее во времени, распадается на два поля с противоположными фазами, из-за чего пуск без всевозможных ухищрений становится невозможным:
Обороты холостого хода немного превышают номинальные, при этом остаются постоянными. Характеристикой однофазного асинхронного двигателя является дополнительный набор проблем, сопряженных с запуском, так как он не развивает пускового момента в нормальных условиях. Магнитное поле однофазного статора, пульсирующее во времени, распадается на два поля с противоположными фазами, из-за чего пуск без всевозможных ухищрений становится невозможным:
— емкость, создающая искусственную фазу;
— расщепленный паз;
— активное сопротивление, формирующее искусственную фазу.
Теоретически поле, вращающееся в противофазе, снижает максимальный КПД однофазного асинхронного агрегата до 50-60% из-за потерь в перенасыщенной магнитной системе и обмотках, нагружаемых токами противополя. Получается, что на одном валу находятся две электрические машины, при этом одна работает в двигательном режиме, а вторая – режиме противовключения. Получается, что электродвигатели однофазные коллекторные не знают конкурентов в соответствующих сетях. Чем и заслужили столь высокую популярность.
Чем и заслужили столь высокую популярность.
Механические характеристики электродвигателя обеспечивает ему определенную сферу использования. Малые обороты, ограниченные частотой сети переменного тока, делают асинхронные агрегаты аналогичной мощности большими по весу и размеру в сравнении с универсальными коллекторными. Однако при включении в цепь питания инвертора с высокой частотой можно добиться соизмеримых размеров и веса. Остается жесткость механической характеристики электродвигателя, к которой добавляются потери на токопреобразование, а также увеличение частоты, повышаются магнитные и индуктивные потери.
Что называют коллекторным двигателем?
Коллекторным двигателем называется электрическая машина, датчик положения ротора и переключатель тока в которой — это одно и то же устройство, называемое щеточно-коллекторным узлом. Про последний можно рассказать дополнительно. Он обеспечивает электрическое соединение цепей в неподвижной части машины с цепями ротора. Конструктивно он состоит из щеток (под ними понимаются скользящие контакты, которые расположены вокруг вращающейся части двигателя) и коллектора (то, что находится на движимом элементе механизма).
Конструктивно он состоит из щеток (под ними понимаются скользящие контакты, которые расположены вокруг вращающейся части двигателя) и коллектора (то, что находится на движимом элементе механизма).
К общим достоинствам можно отнести то, что коллекторный двигатель прост в изготовлении и эксплуатации, имеет значительный ресурс использования и легко может быть отремонтирован. К общим недостаткам причисляют то, что они имеют малую массу и большой коэффициент полезного действия. В большинстве случаев это только плюс, но не сейчас. Так, соединение низкой массы и быстроходности (которая достигает сотен и тысяч оборотов в минуту) приводит к тому, что для нормальной работы почти всегда требуются редукторы. А при перестройке на низкую скорость машина имеет пониженный КПД, и возникают проблемы с охлаждением. Пока изящного решения этой проблемы найти не удалось.
Разновидности
Трехполюсной ротор на подшипниках скольжения;
Двухполюсной статор на постоянных магнитах;
В качестве щеток коллекторного узла.
Этот набор характерен для самых маломощных решений, используемых обычно в детских игрушках, где не требуется большая мощность. В состав более мощных двигателей включается еще несколько конструктивных элементов:
Четыре графитовые щетки в виде коллекторного узла;
Ротор с несколькими полюсами на подшипниках качения;
Статор из постоянных магнитов с четырьмя полюсами.
Чаще всего устройство электродвигателя такого типа используется в современных автомобилях для реализации привода вентилятора системы охлаждения и вентиляции, насосов омывателей, дворников и прочих элементов. Существую и более сложные агрегаты.
Мощность электродвигателя в несколько сотен ватт предполагает использование в составе четырехполюсного статора, выполненного из электромагнитов. Для подключения его обмоток может использоваться один из нескольких способов:
Последовательно с ротором. В данном случае получается большой максимальный момент, однако из-за больших оборотов холостого хода велик риск повреждения двигателя.
Параллельно с ротором. В данном случае обороты остаются стабильными в условиях изменяющейся нагрузки, однако максимальный момент заметно меньше.
Смешанное возбуждение, когда часть обмотки подключается последовательно, а часть параллельно. В данном случае совмещены достоинства предыдущих вариантов. Используется этот тип для стартеров автомобилей.
Независимое возбуждение, при котором используется отдельный источник питания. В данном случае получаются характеристики, соответствующие параллельному подключению. Используется этот вариант довольно редко.
Коллекторный электродвигатель обладает определенными достоинствами: их просто изготавливать, ремонтировать, эксплуатировать, а их ресурс работы достаточно велик. В качестве недостатков обычно выделяется следующий: эффективные конструкции подобных устройств обычно являются быстроходными и низкомоментными, поэтому большинство приводов требует установки редукторов. Это утверждение вполне обосновано, так как электрическая машина, ориентированная на низкую скорость, характеризуется заниженным КПД, а также связанными с этим проблемами охлаждения. Последние таковы, что для них сложно найти изящное решение.
Как работает бесколлекторный мотор — HPI Racing
HPI предлагает для всех типов радиоуправляемых электроавтомоделей великолепную бесколлекторную систему Flux Brushless System! Бесколлекторная система Flux идеально подходит для шоссейных автомоделей, моделей багги и внедорожников в масштабе 1/10 и позволяет разогнать эти машины до скорости почти 100 километров в час!
Flux Brushless System состоит из электронного регулятора скорости и бесколлекторного двигателя.
Бесколлекторный двигатель — это лучший выбор почти для всех электроавтомоделей в масштабе 1/10. С таким мотором ваша модель станет сверхбыстрой на трассе и сможет развивать бешенную скорость! Со стандартным никель-металлогидридным аккумулятором, состоящим из 6-и элементов, или с 2S LiPo (7,4 вольт) аккумулятором вы можете получить до 60 км/ч даже со стандартным редуктором! Мощность бесколлекторного мотора Flux эквивалентна высокофорсированным коллекторным 9 – 10 витковым двигателям, работающих от шести элементных NiMH батарей, а это огромная мощность!
Особенности бесколлекторных двигателей Flux:
- Мощный, высокоскоростной бесколлекторныый
мотор – эквивалент
коллекторного 9,5 виткового
двигателя.
- Отлично сочетание огромной мощности и необычайной эффективности.
- Такой же размер, как у стандартного мотора 540-го типа.
- Необслуживаемая конструкция.
- Внешние контакты для легкой перепайки проводов.
- Крупногабаритные шарикоподшипники.
- Высокий крутящий момент, термостойкий неодимовый ротор.
- Специальная конструкция статора обеспечивает плавное линейное увеличение крутящего момента.
- Простой и удобный монтаж через 4 точки.
- Ресурс в разы больше, чем в сопоставимых коллекторных моторах.
- Легко заменяемые подшипники и ротор.
- Совместим с любым бездатчиковым регулятором скорости для бесколлекторных двигателей.

Электронный регулятор скорости —
«мозг» системы Flux.
Регулятор скорости серии Fluxимеет разъемы для
подключения мотора, разъем типа Dean для подключения и трехжильный
кабель с разъемом для соединения с приемником, так что вы
сможете легко установить регулятор в любом удобном
месте на вашей модели.
Особенности регулятора скорости Flux:
- Программируемый электронный регулятор скорости с функцией заднего хода для бесколлекторных / коллекторных электродвигателей.
- Отсечка при низком напряжении для LiPo аккумуляторов**
- Эффективный алюминиевый радиатор.
- Пропорциональный тормоз с контролем усилия.
- Огромная рабочая мощность (70A * непрерывно / 380A в пике).
- Плавный старт бездатчиковых двигателей (патенты находятся на рассмотрении)
- Dean’s разъем для подключения батареи.
- Надежный выключатель.
- Просто программируется.
- Возможность легко настроить параметры с помощью кабеля HPI link (в комплект не входит).
- Работает с бесколлекторными и стандартными коллекторными двигателями.

Система Flux Brushless System, разработанная HPI, предназначена для любителей и спортсменов, которые хотят иметь мощную, универсальную и доступную бесколлекторную систему. Двигатели Flux чрезвычайно мощные, очень надежные и эффективные, а это самой легкий путь к победе! У бездатчиковых двигателей HPI гораздо меньше проводов, которые можно повредить во время гонки, и это избавляет вас от лишних забот. Вы можете приобрести двигатель в комплекте с регулятором скорости или купить их по отдельности!
Перспективы модернизации
Владельцы
Flux Motiv могут обновлять параметры регулятора
с помощью компьютера и
бесплатного программного обеспечения!
Программисты постоянно делают
обновления программного обеспечения
Flux Motive и вы можете
загружать их, используя набор HPI PC USB programming
kit.
Давайте сначала узнаем, как работает коллекторный двигатель.
Чтобы узнать, почему бесколлекторные двигатели настолько эффективны и имеют высокую мощность, необходимо знать, как работает стандартный коллекторный мотор.
Обычные коллекторные
электродвигатели, которые вы можете найти в
машинахSprint 2 или E-Firestorm имеют
всего два провода (положительный и
отрицательный), которыми двигатель подключается к регулятору
скорости. Внутри корпуса двигателя можно увидеть
два изогнутых постоянных магнита, а по центру
установлен вал с якорем, на котором намотаны обмотки
из медной проволоки. С одной стороны вала якоря
устанавливается моторная шестерня, с другой стороны вала расположен
так называемый коллектор из медных пластин, через который с помощью
угольных щеток ток подается к обмоткам якоря.
Две угольные щетки постоянно скользят по вращающемуся медному коллектору. Как вы можете видеть на рисунке выше, напряжение по проводам через щетки и коллектор поступает к обмоткам якоря, возникает электромагнитное поле, которое взаимодействует с постоянными магнитами статора и заставляет якорь вращаться.
Как начинает вращаться стандартный коллекторный
двигатель.
Когда на обмотки якоря поочередно поступает постоянный
электрический ток, в них возникает электромагнитное поле,
которое с одной стороны имеет «северный» а с другой
«южный» полюс. Поскольку «северный» полюс
любого магнита автоматически отталкиваются от
«северного» полюса другого магнита,
электромагнитное поле одной из обмоток якоря, взаимодействуя с
полюсами постоянных магнитов статора, заставляет якорь вращаться.
Через коллектор и щетки ток поступает на следующую обмотку якоря,
что заставляет якорь вместе с валом мотора продолжать вращение, и
так до тех пор, пока к мотору подается напряжение.
Недостатки
Недостатки коллекторных двигателей выявляются, когда нужно получить огромное количество оборотов от них. Поскольку щетки должны постоянно находиться в контакте с коллектором, в месте их соприкосновения возникает трение, которое значительно увеличивается, особенно на высоких оборотах. Любой дефект коллектора приводит к значительному износу щеток и нарушению контакта, что в свою очередь снижает эффективность мотора. Именно поэтому серьезные гонщики протачивают и полируют коллектор двигателя и меняют щетки почти после каждого заезда. Коллекторный узел стандартного мотора так же является источником радиопомех и требует особого внимания и обслуживания.
Теперь посмотрим, как работает бесколлекторный
двигатель.
Основной особенностью
конструкции бесколлекторного двигателя является то, что он по
принципу работы похож на коллекторный мотор, но все устроено как
бы «наизнанку», и в нем отсутствуют коллектор и щетки. Постоянные магниты, которые в коллекторном моторе установлены на
неподвижном статоре, у бесколлекторного мотора расположены вокруг
вала, и этот узел называется ротор. Проволочные обмотки
бесколлекторного мотора размещены вокруг ротора и имеют несколько
различных магнитных полюсов. Датчиковые бесколлекторные моторы
имеют на роторе сенсор, который посылает сигналы о положении ротора
в процессор электронного регулятора скорости.
Постоянные магниты, которые в коллекторном моторе установлены на
неподвижном статоре, у бесколлекторного мотора расположены вокруг
вала, и этот узел называется ротор. Проволочные обмотки
бесколлекторного мотора размещены вокруг ротора и имеют несколько
различных магнитных полюсов. Датчиковые бесколлекторные моторы
имеют на роторе сенсор, который посылает сигналы о положении ротора
в процессор электронного регулятора скорости.
Почему бесколлекторный двигатель эффективней, чем
коллекторный мотор
Из-за отсутствия коллектора и щеток в бесколлекторном моторе нет
изнашивающихся деталей, кроме шарикоподшипников ротора, а это
автоматически делает его более эффективным и надежным. Наличие
сенсора контроля вращения ротора также значительно повышает
эффективность. У коллекторных двигателей не возникает искрения
щеток, что резко снижает возникновение помех, а отсутствие узлов с
повышенным трением благоприятно сказывается на температуре
работающего мотора, что так же повышает его эффективность.
Существуют ли недостатки у бесколлекторных
двигателей?
Единственный возможный недостаток бесколлекторной системы –
это несколько более высокая стоимость, однако каждый, кто испытал
высокую мощность бесколлекторной системы, почувствовал прелесть
отсутствия необходимости периодической замены щеток, пружин,
коллекторов и якорей, тот быстро оценит общую экономию и не
вернется к коллекторным моторам … никогда!
Действительно ли бесколлекторный двигатель не требует
«никакого обслуживания?
Да! Они таковы, экономят время, поэтому гонщики всего мира теперь с
удовольствием могут передохнуть между заездами. Вам больше не
придется после каждой гонки демонтировать двигатель, разбирать его,
шлифовать коллектор, менять щетки, вновь собирать и заново
устанавливать … отсутствие этих забот — это огромное
удовольствие!
Единственное, что вам возможно потребуется делать, это содержать
двигатель в чистоте, и при необходимости менять подшипники. Эти
процедуры выполняются редко, так что их нельзя классифицировать как
регулярное техническое обслуживание.
Почему без датчика?
Помимо базовых размеров и различных параметров, бесколлекторные
двигатели могут подразделяться по типу: с датчиком и без датчика.
Двигатель с датчиком используют очень маленький сенсор на роторе и
кроме трех толстых кабелей, по которому мотор получает питание,
имеют дополнительный шлейф из тонких проводов, которые соединяют
двигатель с регулятором скорости. Дополнительные провода передают
информацию с датчика о положении ротора сотни раз в секунду. Эта
информация обрабатывается электронным регулятором скорости, что
позволяет мотору работать плавно и эффективно, насколько это
возможно. Такие моторы используют профессиональные гонщики, однако
такие двигатели намного дороже и сложнее в использовании.
Бездатчиковая бесколлекторная система, как можно догадаться, не
имеет датчиков и дополнительных проводов, а ротор таких двигателей
вращается без точной регистрации его положения и оборотов
регулятором скорости. Это позволяет сделать двигатель и регулятор
скорости проще в изготовлении, проще в установке и в целом дешевле. Бездатчиковые системы способны обеспечить такую же мощность, как
датчиковые, просто с чуть-чуть меньшей точностью, а это идеальное
решение для любителей и начинающих спортсменов.
Бездатчиковые системы способны обеспечить такую же мощность, как
датчиковые, просто с чуть-чуть меньшей точностью, а это идеальное
решение для любителей и начинающих спортсменов.
В HPI пришли к выводу, что нашим клиентам не нужна точность, которая доступна для датчиковых систем, для них важнее надежность, и мы решили использовать популярную бездатчиковую систему для комплектов серии Flux.
Мы надеемся, что данная статья объяснит все, что вам нужно знать о системе HPI Flux Brushless.
Коллекторный электродвигатель или бесколлекторный
Коллекторные и бесколлекторные двигатели постоянного тока ДПТ не теряют своей актуальности, широко применяясь в качестве электроприводов подъемных и транспортных средств, поскольку обладают наиболее подходящими для этого пусковыми и регулировочными характеристиками. В этой статье мы рассмотрим особенности конструкции и применения разных видов ДПТ. Конструкция двигателей постоянного тока со времени выпуска первых промышленных моделей 2 половина 19 века не претерпела существенных изменений. Принцип действия базируется на свойстве разноименных полюсов магнита отталкиваться, а одноименных — притягиваться. В число основных элементов, из которых состоит ДПТ, входят:.
Принцип действия базируется на свойстве разноименных полюсов магнита отталкиваться, а одноименных — притягиваться. В число основных элементов, из которых состоит ДПТ, входят:.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Коллекторный электродвигатель
- В чем разница между коллекторными и бесколлекторными электродвигателями постоянного тока?
- Коллекторный и бесколлекторный двигатели
- Сравнение коллекторных и бесколлекторных моторов
- что такое Flux
- Радиоуправляемые модели и игрушки оптом
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Коллекторный и бесколлекторный электродвигатели_ДжоК #2
 youtube.com/embed/V4m6mkSos0c» frameborder=»0″ allowfullscreen=»»/>
youtube.com/embed/V4m6mkSos0c» frameborder=»0″ allowfullscreen=»»/>Коллекторный электродвигатель
Чем отличаются коллекторные двигатели от бесколлекторных, главные преимущества и недостатки обоих типов. Станки и мехатроника. Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4. Токарные станки. Мини-станки токарные 2. Поворотные оси. Оси на волновом редукторе 9. Оси на ременном редукторе 5. Задние бабки 3.
Линейные модули. Линейные модули оси Z 2. Линейные модули с ШВП тяжелые Модули перемещения URS 3. Модули перемещения LRS 7. Модули перемещения VRS вертикальные 2. Линейные модули с ременным приводом 1. Контроллеры и системы ЧПУ. Контроллеры Mach5 3. Автономные контроллеры 5. Контроллеры Mach4 9. Контроллеры NC Studio 5.
Контроллеры ЧПУ 3 оси. Контроллеры ЧПУ 4 оси. Системы ЧПУ фрезерные 1. Системы ЧПУ плазменная резка 1. Управление станком с ЧПУ. Платы опторазвязки 6. Интерфейсные платы 5 осей 1. Платы опторазвязки LPT 5. ПЛК 2. Платы коммутации Коммутация, переходники Конвертеры сигналов Наборы Наборы управления на сервоприводах 3.
Интерфейсные платы 5 осей 1. Платы опторазвязки LPT 5. ПЛК 2. Платы коммутации Коммутация, переходники Конвертеры сигналов Наборы Наборы управления на сервоприводах 3.
Наборы управления на ШД 4. Пульты для станков 9. Генераторы импульсов ручные MPG 3. Пульты для Mach4 3. Пульты для NCStudio 3. Питание и кабели. Источники питания Импульсные блоки питания Трансформаторные блоки питания 5.
Аксессуары к БП 7. Трансформаторы и выпрямители 6. Кабели и проводка Провода силовые Провода сигнальные и слаботочные 8. Шлейфы, оконцованные кабели Фильтры помех 3. Разъемы и клеммники Клеммники 6. Разъемы кабель-кабель Разъемы кабель-корпус Монтажные материалы Щиты монтажные 7. DIN-рейка 4. Кнопки, педали 4. Реле, контакторы, фильтры 9. Блоки реле 3. Твердотельные реле 3. ЭМИ фильтры 3. Датчики, энкодеры, линейки. Бесконтактные датчики Индуктивные датчики Датчики высоты, щупы 7.
Концевые выключатели 1. Линейки и УЦИ Rational Линейки оптические Устройства индикации DRO 2. Энкодеры 5. Пластины и уголки для датчиков 3. Двигатели и привод. Шпиндели для ЧПУ. Шпиндели водяные Водяные шпиндели GDZ 8. Шпиндели GDL 2. Водяные шпиндели GDK 5. Шпиндели DX водяного охлаждения по металлу 5. Водяные шпиндели TDK 6. Водяные шпиндели GMT 4. Шпиндельные двигатели Шпиндельные серводвигатели CTB 5.
Энкодеры 5. Пластины и уголки для датчиков 3. Двигатели и привод. Шпиндели для ЧПУ. Шпиндели водяные Водяные шпиндели GDZ 8. Шпиндели GDL 2. Водяные шпиндели GDK 5. Шпиндели DX водяного охлаждения по металлу 5. Водяные шпиндели TDK 6. Водяные шпиндели GMT 4. Шпиндельные двигатели Шпиндельные серводвигатели CTB 5.
Драйверы шпиндельных двигателей Yuhai 2. Шпиндельные серводвигатели Yuhai 3. Шпиндели воздушные Шпиндели воздушные TDK круглые 2. Шпиндели воздушного охлаждения GMT 7. Шпиндели воздушного охлаждения Hanqi 3. Шпиндели ременные 5.
Шпиндели с автосменой ATC, ременные 4. Минишпиндели Windward 5. Фрезерные шпиндельные головки 2. Шпиндели Kress 7. Коллекторные мини-шпиндели 2.
В чем разница между коллекторными и бесколлекторными электродвигателями постоянного тока?
Задача электрического двигателя создать вращение, что приводит в движение радиоуправляемые модели. Часто одни и те же радиоуправляемые модели — автомодели, авиамодели, судомодели — сильно отличаются друг от друга по цене — почти в 2 раза. Эти модели могут быть укомплектованы коллекторными и бесколлекторными двигателями и соответственными регуляторами. Нужно понять, какой двигатель выбрать. Существует 2 основных типа электродвигателей, использующихся в радиоуправляемых моделях: коллекторные и бесколлекторные. Коллекторные двигатели brushed, щеточные дешеле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны. Определяющей особенностей коллекторных двигателей является наличие щеточно-коллекторного узла, который обеспечивает движение радиоуправляемой модели.
Эти модели могут быть укомплектованы коллекторными и бесколлекторными двигателями и соответственными регуляторами. Нужно понять, какой двигатель выбрать. Существует 2 основных типа электродвигателей, использующихся в радиоуправляемых моделях: коллекторные и бесколлекторные. Коллекторные двигатели brushed, щеточные дешеле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны. Определяющей особенностей коллекторных двигателей является наличие щеточно-коллекторного узла, который обеспечивает движение радиоуправляемой модели.
Чем отличается бесщеточный (бесколлекторный) электродвигатель от щеточного (коллекторного).
Коллекторный и бесколлекторный двигатели
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Логическим завершением публикаций будет схема регулятора. Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов. Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе.
Также немаловажную роль сыграло появление мощных неодимовых магнитов. Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе.
Сравнение коллекторных и бесколлекторных моторов
Электродвигатели сегодня широко распространены во многих отраслях, в частности в промышленности и робототехнике. Кроме того, существует большой спрос на малые, эффективные электромоторы с высоким и низким крутящим моментом, а также на электродвигатели различных мощностей для автомобильного сектора. Инженеры, работающие в этих областях, могут выбирать между коллекторными щеточными и бесколлекторными бесщеточными электродвигателями. Все они работают в соответствии с законом индукции Фарадея, тем не менее, между этими моторами есть ключевые различия, которые могут быть неочевидны для новичков в электроприводе.
Все они работают в соответствии с законом индукции Фарадея, тем не менее, между этими моторами есть ключевые различия, которые могут быть неочевидны для новичков в электроприводе.
Наверняка у каждого новичка, который впервые связал свою жизнь с электромоделями на радиоуправлении, после тщательного изучения начинки, появляется вопрос.
что такое Flux
Подписавшись, Вы будете оперативно получать новости Электротехнической отрасли, кабельных заводов, наличие на складе, спецпредложения. Трудно себе представить современное производство без различного оборудования и без электродвигателей, которые приводят его в действие. Исправная работа электродвигателя — гарантия качественного производственного процесса в любой промышленной отрасли. Электродвигатели постоянного тока создают регулируемые электроприводы. Устройство электродвигателя постоянного тока таково, что он может работать только от постоянного тока.
Радиоуправляемые модели и игрушки оптом
Если вы уже решили, какую именно радиоуправляемую модель хотите купить и точно знаете, что ваш будущий внедорожник, самолет, дрон или быстроходный катер будет оснащен электродвигателем, самое время задуматься, какого типа мотор лучше и надежнее. Современная RC-модель на электрической тяге может иметь коллекторный или бесколлекторный двигатель. Каждый вариант имеет свои достоинства и недостатки. И разница тут не только в цене, как могут сказать в ближайшем магазине. Итак, рассмотрим все детально, а выводы относительно того, с каким же моторчиком выбрать машинку или другую модель на радиоуправлении, пусть каждый делает самостоятельно. Ротор подвижная часть и статор неподвижная часть — это два основных элемента мотора коллекторного типа. Внутри корпуса статора вращается подвижный ротор с медной обмоткой. С одной стороны вала ротора установлена передающая шестерня, или шкив, а с другой — коллектор, который, по сути, является набором контактов.
Современная RC-модель на электрической тяге может иметь коллекторный или бесколлекторный двигатель. Каждый вариант имеет свои достоинства и недостатки. И разница тут не только в цене, как могут сказать в ближайшем магазине. Итак, рассмотрим все детально, а выводы относительно того, с каким же моторчиком выбрать машинку или другую модель на радиоуправлении, пусть каждый делает самостоятельно. Ротор подвижная часть и статор неподвижная часть — это два основных элемента мотора коллекторного типа. Внутри корпуса статора вращается подвижный ротор с медной обмоткой. С одной стороны вала ротора установлена передающая шестерня, или шкив, а с другой — коллектор, который, по сути, является набором контактов.
Решено: Сравнение коллекторных и бесколлекторных моторов Электродвигатели Ответ.
Чтобы ваш четырехколесный друг на радиоуправлении долго служил вам верой и правдой, ему необходимы комплектующие и детали отменного качества. В каталоге вы найдете товары только от ведущих производителей. Выбирайте деталь требуемого типа, конструкции и назначения, заказывайте ее с доставкой на дом и наслаждайтесь гонками! Для вас создана удобная система фильтров.
Выбирайте деталь требуемого типа, конструкции и назначения, заказывайте ее с доставкой на дом и наслаждайтесь гонками! Для вас создана удобная система фильтров.
Flux Brushless System состоит из электронного регулятора скорости и бесколлекторного двигателя. С таким мотором ваша модель станет сверхбыстрой на трассе и сможет развивать бешенную скорость! Особенности бесколлекторных двигателей Flux :. Регулятор скорости серии Flux имеет разъемы для подключения мотора, разъем типа Dean для подключения и трехжильный кабель с разъемом для соединения с приемником, так что вы сможете легко установить регулятор в любом удобном месте на вашей модели.
Самые маленькие двигатели данного типа единицы Ватт содержат в корпусе:. Применяются, в основном, в детских игрушках, плейерах, фенах, электробритвах, аккумуляторных отвёртках и т.
Бесколлекторный электродвигатель. В ряде отраслей промышленности и на транспорте могут существовать условия, когда коллекторные электродвигатели постоянного тока обычного исполнения неприменимы.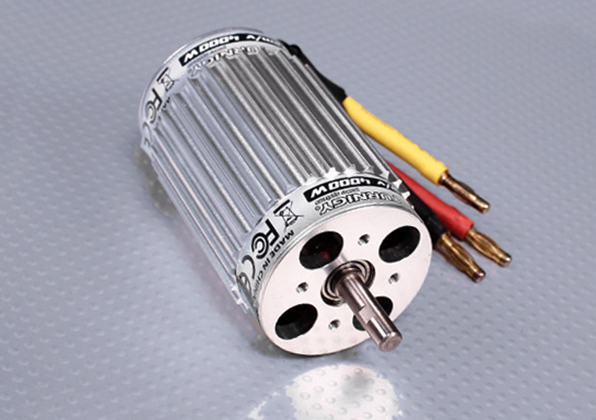 К таким условиям в первую очередь следует отнести взрывоопасные газовые среды; различные агрессивные среды, быстро разрушающие коллектор; пониженное или повышенное давление; относительно низкую или высокую влажность. Сюда же можно отнести условия, в которых работают космические летательные аппараты, характеризующиеся наличием глубокого вакуума и отсутствием доступа к двигателю во время его эксплуатации. Кроме этого, из-за недостаточной механической прочности коллектора эти электродвигатели не находят широкого применения при создании высокооборотных электроприводов. Радикальным способом расширения областей применения электродвигателей постоянного тока является создание машины постоянного тока с бесконтактными коммутаторами, в которых хорошие пусковые качества, энергетические и регулировочные характеристики коллекторных машин с постоянными магнитами сочетались бы с высокой надежностью бесколлекторных машин переменного тока.
К таким условиям в первую очередь следует отнести взрывоопасные газовые среды; различные агрессивные среды, быстро разрушающие коллектор; пониженное или повышенное давление; относительно низкую или высокую влажность. Сюда же можно отнести условия, в которых работают космические летательные аппараты, характеризующиеся наличием глубокого вакуума и отсутствием доступа к двигателю во время его эксплуатации. Кроме этого, из-за недостаточной механической прочности коллектора эти электродвигатели не находят широкого применения при создании высокооборотных электроприводов. Радикальным способом расширения областей применения электродвигателей постоянного тока является создание машины постоянного тока с бесконтактными коммутаторами, в которых хорошие пусковые качества, энергетические и регулировочные характеристики коллекторных машин с постоянными магнитами сочетались бы с высокой надежностью бесколлекторных машин переменного тока.
Вентильные двигатели в англоязычной литературе BLDC или PMSM ещё называют бесколлекторными двигателями постоянного тока , потому что коллектор такого двигателя обычно питается от постоянного напряжения. Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам в частности, высокооборотных микроприводов точного позиционирования обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока БДПТ или BLDC. Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками.
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам в частности, высокооборотных микроприводов точного позиционирования обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока БДПТ или BLDC. Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками.
Разница между щеточными и бесщеточными двигателями
В чем разница между щеточными и бесщеточными двигателями? У одного есть кисти, а у другого нет, верно?
Хотя на первый взгляд это, конечно, правда, реальный вопрос заключается в том, почему существуют оба типа? Каковы основные преимущества и ограничения каждого из них?
Читайте дальше, чтобы узнать.
СВЯЗАННЫЕ: 10 САМЫХ ВАЖНЫХ ИЗОБРЕТЕНИЙ НИКОЛЫ ТЕСЛЫ
Но, прежде чем мы приступим к сравнению двух, полезно потратить некоторое время на обсуждение каждого типа двигателя в отдельности.
Что такое коллекторный двигатель?
В щеточном двигателе постоянного тока используются катушки с намотанной проволокой, называемые якорем, которые действуют как двухполюсный электромагнит. Дважды за цикл направление тока меняется на противоположное коммутатором, который представляет собой механический поворотный переключатель. Полюса электромагнита тянут и толкают постоянные магниты снаружи двигателя. Затем коммутатор меняет полярность электромагнита якоря, когда его полюса пересекают полюса постоянных магнитов, образуя постоянный ток.
«Рабочий конец» щеточного двигателя постоянного тока — узел ротора с обмотками коллектора и электромагнита. Источник: Zach Hoeken/FlickrКоллекторные двигатели были первыми коммерчески важными двигателями, которые уже более 100 лет используются для управления двигателями в коммерческих и промышленных целях. Они являются самыми основными и используются с конца 1800-х годов.
Коллекторные двигатели можно регулировать по скорости, изменяя рабочее напряжение или силу магнитного поля внутри них.
Этот уровень управления очень полезен для многих приложений.
Коллекторные двигатели, как правило, состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Щетки (очевидно)
- Коллектор
В следующем разделе мы обсудим, как работают эти компоненты.
Как работает коллекторный двигатель?
Как упоминалось ранее, коллекторный двигатель состоит из четырех основных компонентов. Первый, называемый статором, создает стационарное магнитное поле, окружающее ротор.
Типичная конструкция коллекторного двигателя DB.
Вверху слева: Полный двигатель и корпус.
Вверху справа: (слева направо) пластиковая крышка с открытыми щетками, ротор с коммутатором и электромагнитными обмотками, а также корпус с постоянными магнитами и статором внутри.
Внизу слева: Изолированный узел ротор/якорь (обмотки электромагнита коммутатора и т. д.).
д.).
Внизу справа: Крупный план пластиковой шапочки с электродами-щетками.
Источник: Илья Криворук/Wikimedia Commons
Это магнитное поле создается с помощью двух изогнутых постоянных магнитов. Эти магниты обычно стационарны (не двигаются), отсюда и термин.
Также важно отметить, что северный полюс одного будет направлен на ротор, а южный полюс другого — на ротор.
Ротор, или якорь, состоит из проволочных катушек, которые при прохождении через них электричества могут создавать магнитное поле.
Это часть, которая движется (отсюда и название «ротор») и вращает главный вал двигателя.
Из-за магнитного полярного притяжения магнитное поле ротора будет пытаться выровняться/оттолкнуться от поля статора, заставляя ротор вращаться вокруг своей оси.
Когда к двигателю подается электричество, создается магнитное поле, которое притягивает (и отталкивает) неподвижные магниты в статоре. Чтобы ротор продолжал вращаться, магнитное поле необходимо менять на противоположное каждые 9 секунд. 0009 180-градусный оборот ротора (в простом одноякорном коллекторном двигателе).
0009 180-градусный оборот ротора (в простом одноякорном коллекторном двигателе).
Это изменение магнитной полярности ротора осуществляется щетками двигателя (обычно сделанными из углерода) и коммутатором (частью, которая «коммутирует» или реверсирует электрический ток на якорь ротора. Щетки обычно всего два неподвижных электрода, которые трутся о кольцо коммутатора, когда оно вращается вместе с ротором.0003
Щетки также будут подпружинены, чтобы обеспечить их контакт с коллектором.
Коллектор обычно состоит из небольшого, как правило, медного цилиндра, прикрепленного к ротору с разрывами через равные промежутки (например, 180 градусов в роторе с одним якорем). Электрический ток будет течь через одну половину коммутатора, через якорь и обратно из другой половины коммутатора.
Самые популярные
По мере вращения ротора (якоря) вращается и коммутатор, постоянно замыкая и разрывая электрическую цепь щетками. Это приводит к тому, что магнитные полюса обмоток ротора меняют магнитную полярность, поскольку цепь размыкается в одном направлении и восстанавливается в другом, т. е. ток меняется на противоположный каждые 180 градусов .
Это приводит к тому, что магнитные полюса обмоток ротора меняют магнитную полярность, поскольку цепь размыкается в одном направлении и восстанавливается в другом, т. е. ток меняется на противоположный каждые 180 градусов .
Более сложные двигатели будут иметь ряд якорей с разрывами между ними на коллекторе. Это помогает предотвратить возможное заклинивание двигателя, если щетки замыкают цепь через зазоры коллектора.
Другими словами, каждый контур якоря по очереди становится электромагнитом и притягивает/отталкивает внешние фиксированные постоянные магниты статора. Довольно аккуратно.
В реальных двигателях якорь также будет состоять из массы проводов, а не из одного провода. Это помогает значительно улучшить силу электромагнита и, следовательно, крутящий момент двигателя.
Более сложная схема коллекторного двигателя постоянного тока. Обратите внимание на несколько якорей и связанные с ними разрывы в кольце коммутатора. Источник: Джаред Оуэн/YouTube Обычно коллекторные двигатели постоянного тока размещаются в корпусе из штампованной стали и оцинкованном корпусе с пластиковой крышкой на одном конце. В корпусе и крышке обычно есть ряд отверстий, которые обычно присутствуют для обеспечения потока воздуха через двигатель, чтобы предотвратить перегрев.
В корпусе и крышке обычно есть ряд отверстий, которые обычно присутствуют для обеспечения потока воздуха через двигатель, чтобы предотвратить перегрев.
Также обычно имеются отверстия для винтов для установки двигателя на место. Пластиковая крышка также будет удерживать пару соединительных контактов для подключения источника питания и предотвращения короткого замыкания из-за контакта с металлическим корпусом двигателя.
Если у вас возникли проблемы с визуализацией работы коллекторного двигателя постоянного тока, вот отличное моделирование.
Для чего используются коллекторные двигатели?
Коллекторные двигатели постоянного тока (BLDC) можно найти практически везде в вашем доме и в пути. Всякий раз, когда требуется средство преобразования электричества во вращательное движение, скорее всего, вы найдете коллекторный двигатель постоянного тока.
В вашем доме любая движущаяся игрушка или электронное устройство, скорее всего, будет иметь его. Электрические зубные щетки, моторизованные хлеборезки, любимая радиоуправляемая машинка вашего ребенка — все они используют преимущества этих удивительных инженерных решений.
В более широком мире щеточные двигатели постоянного тока до сих пор широко используются в таких машинах, как электрические двигательные установки, краны, буровые установки и сталепрокатные станы, и это лишь некоторые из них, из-за возможности изменять отношение крутящего момента к скорости, только для щеточных двигателей
Что такое бесщеточный двигатель?
В отличие от щеточных двигателей постоянного тока, как следует из названия, бесщеточные двигатели постоянного тока избавляются от необходимости использования щеточных электродов для вращения ротора. Они также устраняют необходимость в физическом коммутаторе.
Схема бесколлекторного двигателя постоянного тока. Изменено из: JAES/YouTube Также известные как двигатели с электронной коммутацией (ECM или EC-двигатели), они, как широко считается, имеют более высокое отношение мощности к весу, скорость, уровень контроля и более низкие требования к техническому обслуживанию по сравнению с щеточными двигателями. .
.
Они также частично меняют принцип работы коллекторного двигателя. Например, на роторе используются постоянные магниты, а для вращения ротора используются управляемые электромагниты.
Бесщеточные двигатели обычно бывают двух видов:
- Inrunner — здесь статор расположен снаружи ротора.
- Outrunner — здесь статор находится внутри ротора. Это относится к старым дисководам для гибких дисков и т. д. Этот термин происходит от того факта, что ротор вращается снаружи.
В бесщеточном двигателе медные катушки обмотки фиксированы, так как это постоянный магнит, который вращается вместе с ротором. Небольшая печатная плата используется для имитации работы щеток в обычном коллекторном двигателе путем управления подачей энергии на электромагниты.
Небольшая печатная плата используется для имитации работы щеток в обычном коллекторном двигателе путем управления подачей энергии на электромагниты.
Кроме того, основной принцип технологии такой же, как у коллекторного двигателя, хотя применение немного отличается. Бесщеточные двигатели впервые появились в 1960-х годах благодаря появлению твердотельной электроники.
Как работает бесщеточный двигатель?
Мы уже подробно рассмотрели, как работает коллекторный двигатель. Бесщеточный двигатель, как предполагалось ранее, работает аналогичным образом, за исключением того, какие части неподвижны, а какие вращаются.
Электрический ток на ротор вообще не подается, а постоянные магниты крепятся к валу, а не к статору. Катушки электромагнита закреплены на статоре, поэтому больше нет необходимости в щеточных электродах и коммутаторе.
Как и в матовых катушках электромагнитов, здесь катушки обычно состоят из сердечника из мягкого железа, обернутого проволокой.
Стационарные катушки электромагнита последовательно включаются и выключаются, чтобы временно намагнитить их для отталкивания или притяжения постоянных магнитов на роторе. По сути, они используют магнетизм, чтобы толкать и тянуть магниты, прикрепленные к ротору, чтобы влиять на вращение вала.
Схема, показывающая принцип работы бесщеточного двигателя. В этом случае катушка 2 и ее противоположная партнерская катушка находятся под напряжением. «Крышка» внешнего ротора вращается за счет притяжения противоположных магнитных полюсов внутренних катушек электромагнита и внешних фиксированных постоянных магнитов. В этом случае ротор будет вращаться против часовой стрелки. Источник: JAES/YouTubeТаким образом, крутящий момент создается постоянным смещением магнитных полей ротора и статора. Когда постоянные магниты пытаются выровняться, система управления двигателем автоматически либо выключает, либо меняет полярность электромагнитов, чтобы сохранить несоосность полей.
Это достигается за счет использования датчиков, способных определять угол поворота ротора (в частности, постоянных магнитов) в любой момент времени. Затем полупроводниковые переключатели, такие как транзисторы, используются для изменения электрического тока через электромагнитные обмотки.
Затем полупроводниковые переключатели, такие как транзисторы, используются для изменения электрического тока через электромагнитные обмотки.
Как и в коллекторном двигателе, магнитное поле катушек может быть изменено на противоположное по требованию путем изменения направления тока в них. Их также можно полностью отключить, просто отключив катушку от электрического тока (например, выключив ее).
Вращением вала также можно управлять, регулируя величину тока в катушках.
Еще один пример бесколлекторного двигателя постоянного тока. Статор слева, а ротор (с видимыми постоянными магнитами) справа. Источник: Ленц Гриммер/Flickr 9.0014 Для чего используются бесщеточные двигатели? Бесщеточные двигатели постоянного тока, как и щеточные, сегодня используются практически повсеместно. Из-за их высокой эффективности и управляемости, не говоря уже о более длительном сроке службы, они, как правило, используются в устройствах, которые либо работают постоянно, либо регулярно используются.
Их можно найти, например, в стиральных машинах, кондиционерах, электрических вентиляторах и другой бытовой электронике. Благодаря тому, как они работают, они способствовали значительному снижению энергопотребления многих современных электронных устройств.
Электромобили и дроны также хорошо используют бесколлекторные двигатели благодаря их способности обеспечивать точное управление. Это очень важно, поскольку дронам необходимо постоянно и точно контролировать скорость каждого ротора, чтобы выполнять такие действия, как зависание.
Вы также можете найти их в вакуумных машинах, и раньше они использовались для вращения жестких дисков в старых компьютерах. Они также широко используются в сборках компьютерных вентиляторов.
Демонтированный бесщеточный канальный вентилятор постоянного тока. Не два больших электромагнита с фиксированной катушкой и печатная плата. Источник: Materialscientist/Wikimedia Commons Долговечность и эксплуатационная надежность в течение длительного времени, а также энергоэффективность и высокое соотношение выходной мощности и габаритов быстро делают их предпочтительным двигателем для многих разрабатываемых сегодня электронных устройств.
По этой причине ожидается, что бесщеточные двигатели будут находить все более широкое применение. Например, они, вероятно, станут общей чертой сервисных роботов, поскольку бесщеточные двигатели лучше подходят для управления усилием, чем другие альтернативы, такие как шаговые двигатели.
В чем основное различие между щеточными и бесщеточными двигателями?
К настоящему времени вы уже должны понимать разницу между двумя типами двигателей. Учитывая их различные конструкции, есть некоторые другие неотъемлемые преимущества одного над другим.
К ним относятся, помимо прочего:
- Коллекторные двигатели относительно неэффективны из-за потерь мощности на трение и передачи мощности через систему коммутаторов. С другой стороны, бесщеточные двигатели
- более эффективны из-за отсутствия механических потерь, наблюдаемых в щеточных двигателях.
- Благодаря своей конструкции коллекторные двигатели имеют более короткий срок службы из-за износа щеток. Обычно они требуют замены каждые два-семь лет, в зависимости от рабочих температур и рабочей среды.
- Поскольку в бесщеточных двигателях отсутствуют щетки и физические коммутаторы, они требуют меньше общего обслуживания.
 Обычно они требуют замены каждые два-семь лет, в зависимости от рабочих температур и рабочей среды.
Обычно они требуют замены каждые два-семь лет, в зависимости от рабочих температур и рабочей среды.- Коллекторные двигатели требуют более сложных методов управления скоростью. Понижение напряжения снижает крутящий момент двигателя, но это происходит за счет более низких скоростей, поскольку крутящий момент резко падает. Бесщеточные двигатели
- относительно просты в управлении. По этой причине крутящий момент имеет тенденцию быть выше на более низких скоростях для бесщеточных двигателей.
- Коллекторные двигатели работают слишком быстро, чтобы их можно было использовать в большинстве приложений. По этой причине им, как правило, требуется система зубчатых передач для снижения скорости и, следовательно, увеличения крутящего момента. Однако бесщеточные двигатели
- в этом отношении превосходны. По этой причине они часто используются напрямую без необходимости передачи. В некоторых специальных приложениях может использоваться зубчатая передача, если они требуют очень высокой точности или большего крутящего момента. Бесщеточные двигатели
- легче, долговечнее, эффективнее и безопаснее для некоторых применений. Они также работают намного тише. Втулочные двигатели
- могут генерировать искры, что нежелательно в местах, где существует риск взрыва. По этой причине бесщеточные двигатели часто являются предпочтительным выбором для работы в опасных условиях.
- Многие инструменты, в которых используются бесщеточные двигатели, часто называют «умными двигателями». Это связано с тем, что датчики используются для определения сопротивления двигателя для таких вещей, как электрические дрели. Таким образом, подача тока может регулироваться автоматически. Это позволяет таким инструментам быть очень эффективными с точки зрения потребления электроэнергии.
- Учитывая относительную сложность бесколлекторных двигателей, неудивительно, что они, как правило, дороже. Коллекторные двигатели, с другой стороны, относительно дешевы.
 По этой причине они часто используются напрямую без необходимости передачи. В некоторых специальных приложениях может использоваться зубчатая передача, если они требуют очень высокой точности или большего крутящего момента.
По этой причине они часто используются напрямую без необходимости передачи. В некоторых специальных приложениях может использоваться зубчатая передача, если они требуют очень высокой точности или большего крутящего момента. Коллекторные двигатели, с другой стороны, относительно дешевы.
Коллекторные двигатели, с другой стороны, относительно дешевы.А это, как говорится, накрутка.
Надеемся, теперь у вас есть представление о двух типах двигателей и основных принципах, лежащих в основе их конструкции. Теперь вы также должны оценить относительные плюсы и минусы любого устройства.
Итак, в следующий раз, когда вы подумываете о приобретении электроинструмента или мотора для своего следующего проекта, вы, возможно, захотите раскошелиться на бесщеточный инструмент?
Еще новости
наука
SpaceX Илона Маска планирует заселить Марс до конца века
Кристофер Макфадден| 25.05.2022
инновации
Новый «умный мини-город» от Oracle революционизирует ваши рабочие поездки — вот как
Sade Agard| 28.09.2022
предложения
7 лучших универсальных пультов для удобного управления домашними устройствами
Ceren Uysal| 26. 05.2022
05.2022
Разница между щеточным и бесщеточным двигателями
Хотя наличие щеток является основным фактором, отличающим коллекторные и бесщеточные двигатели постоянного тока, это не единственная разница. На этой странице объясняются различия в том, как работают два типа двигателей и как они управляются.
Различные детали, используемые в щеточных и бесщеточных двигателях постоянного тока
Двигатели состоят из статора и ротора. Магнитная сила, возникающая при протекании тока через катушку, заставляет ротор вращаться. Так работают все электродвигатели, независимо от того, щеточные они или бесщеточные.
Однако существует разница между щеточными и бесщеточными двигателями в конструкции статора и ротора. Более того, в то время как наличие щеток и коллектора необходимо, учитывая, как щеточный двигатель постоянного тока достигает вращения, для бесщеточного двигателя постоянного тока вместо этого требуется схема привода.
| Коллекторный двигатель постоянного тока | Бесщеточный двигатель постоянного тока | |
|---|---|---|
| Ротор | Намотанный многослойный сердечник | Постоянный магнит |
| Статор | Постоянный магнит | Намотанный многослойный сердечник |
| Управление | Щетки и коллектор | Магнитный датчик и схема привода |
Ротор щеточного двигателя постоянного тока имеет конструкцию, состоящую из намотанной катушки на многослойный сердечник и вал. При вращении ротора в магнитном поле вместе с ним вращается и коллектор, при этом контактируя поочередно с каждой из щеток. Каждый раз, когда коммутатор поворачивается от одной щетки к другой, он меняет направление тока в катушке, тем самым поддерживая циклическое движение ротора и приводя в действие двигатель. Управление скоростью и крутящим моментом коллекторного двигателя постоянного тока осуществляется путем изменения напряжения и тока.
При вращении ротора в магнитном поле вместе с ним вращается и коллектор, при этом контактируя поочередно с каждой из щеток. Каждый раз, когда коммутатор поворачивается от одной щетки к другой, он меняет направление тока в катушке, тем самым поддерживая циклическое движение ротора и приводя в действие двигатель. Управление скоростью и крутящим моментом коллекторного двигателя постоянного тока осуществляется путем изменения напряжения и тока.
В бесщеточном двигателе постоянного тока, напротив, постоянный магнит является частью узла ротора. Более того, в то время как щетки и коллектор в коллекторном двигателе постоянного тока находятся в физическом контакте, в бесщеточном двигателе постоянного тока такого контакта нет. Вместо этого ток, протекающий через катушку, изменяется в соответствии с ориентацией магнитных полюсов ротора, которая определяется датчиком.
Различная основная конструкция щеточных и бесщеточных двигателей постоянного тока
В этом разделе содержится более подробная информация об этих различиях в управлении двумя типами двигателей.
Управление коллекторными двигателями постоянного тока
Вращением коллекторных двигателей постоянного тока управляют щетки и коллектор. Статор содержит магнит возбуждения, и электрический ток протекает через катушку в роторе. То есть электрический контакт между щетками и коммутатором позволяет току течь от щетки к коммутатору, а затем к катушке. Этот ток в катушке создает магнитную силу (с направлением, определяемым правилом левой руки Флеминга), и это заставляет ротор вращаться. Однако направление магнитной силы смещается к центру, когда вращение приближается к 90°, и это приведет к остановке вращения.
Чтобы избежать этого, ток отключается незадолго до того, как ротор достигает положения 90°. Ротор продолжает вращаться по инерции после 90°, пока ток снова не начнет течь, на этот раз в противоположном направлении. Это обратное направление тока перемещает ротор из положения 90° в противоположное положение 270°, где направление потока снова меняется на противоположное.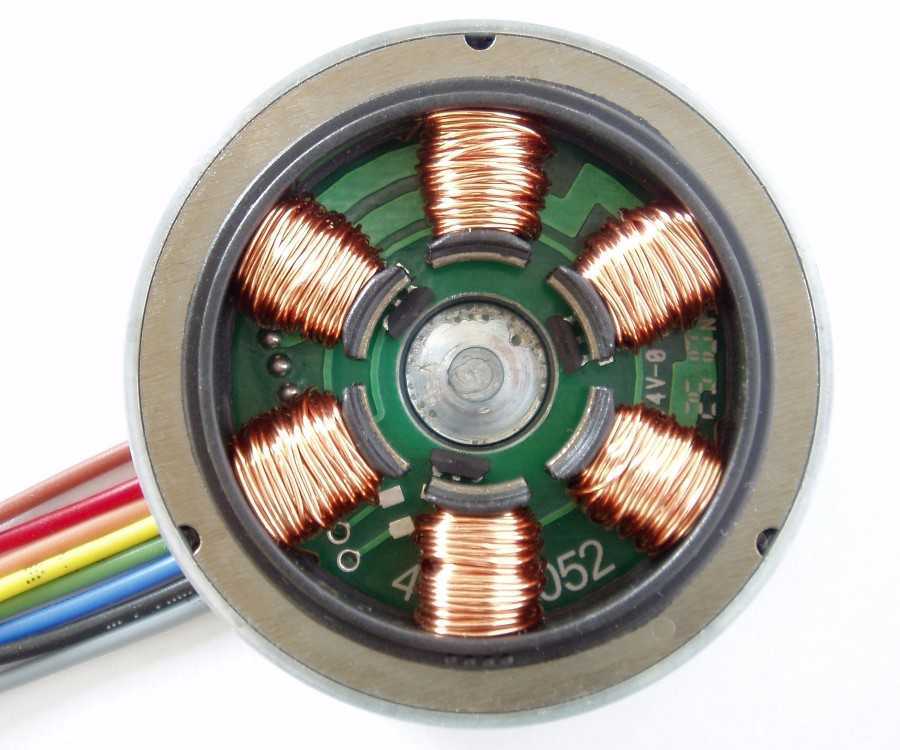 Другими словами, вращение ротора вызывает изменение направления тока через катушку каждые 180°, что, в свою очередь, поддерживает вращение.
Другими словами, вращение ротора вызывает изменение направления тока через катушку каждые 180°, что, в свою очередь, поддерживает вращение.
Управление крутящим моментом и скоростью двигателя осуществляется путем изменения тока в катушке без изменения геометрии катушки, количества витков или плотности потока магнита возбуждения. Чем выше ток, тем больше крутящий момент и тем быстрее вращается двигатель.
Управление бесщеточными двигателями постоянного тока
Управление работает по-другому в бесщеточном двигателе постоянного тока, поскольку обмотка сердечника находится в статоре, конфигурация, противоположная щеточному двигателю постоянного тока.
Например, трехфазный бесщеточный двигатель постоянного тока с внешним ротором состоит из трех катушек статора, соединенных с шестью переключателями. Магнитная полярность (N или S) катушек определяется включением или выключением этих переключателей, и это делается таким образом, что ротор вращается. То есть поток тока регулируется так, чтобы чередовать магнитные полярности статора таким образом, чтобы магнитные силы притяжения и отталкивания заставляли ротор вращаться с высокой скоростью.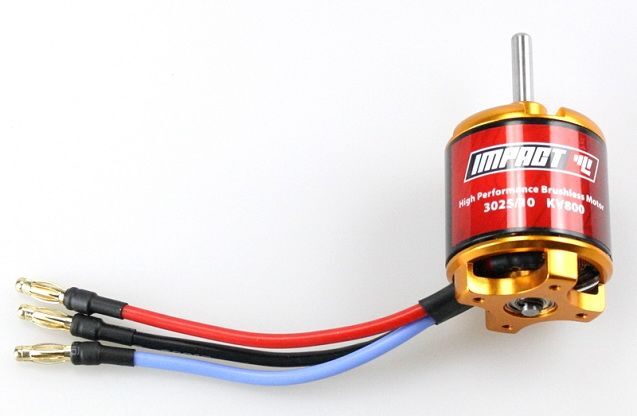
Элементы, составляющие схему управления бесщеточным двигателем постоянного тока, могут включать в себя датчик магнитной полярности для определения скорости двигателя, схему для сравнения фактической скорости двигателя с эталонной скоростью, схему для расчета требуемого напряжения привода и цепь привода, которая обеспечивает это напряжение.
Коллекторный двигатель постоянного тока (слева) и бесщеточный двигатель постоянного тока (внутренний ротор BLDC: справа)r
Различные риски, связанные с долговечностью и шумом
Физический контакт между щетками и коллектором в щеточном двигателе постоянного тока означает, что эти детали изнашиваются по мере использования. Кроме того, связанные с этим риски электрических помех, искрения и акустического шума делают этот контакт проблематичным на высоких скоростях. В то время как коллекторные двигатели постоянного тока хороши для поддержания низких первоначальных затрат, необходимость технического обслуживания, такого как регулярный осмотр или замена деталей, может увеличить их долгосрочные затраты.
Между тем, отсутствие щеток означает, что бесщеточные двигатели постоянного тока не подвержены износу этих деталей или электрическому шуму, вызванному контактом щеток. Они просты в управлении по сравнению с щеточными двигателями постоянного тока, поскольку они могут использовать технологию, называемую синусоидальным приводом, для обеспечения бесшумной работы с низким уровнем вибрации и электрического шума. Вот почему бесщеточные двигатели постоянного тока, как правило, выбирают для приложений, требующих двигателей с длительным сроком службы и высокой эффективностью.
Отличается необходимостью датчика положения ротора
Поскольку они полагаются на свою способность изменять направление тока, коллекторные двигатели постоянного тока не должны определять положение ротора.
Бесщеточные двигатели постоянного тока, с другой стороны, нуждаются в этой возможности, потому что они управляются на основе магнитной полярности ротора, когда он вращается в разных положениях.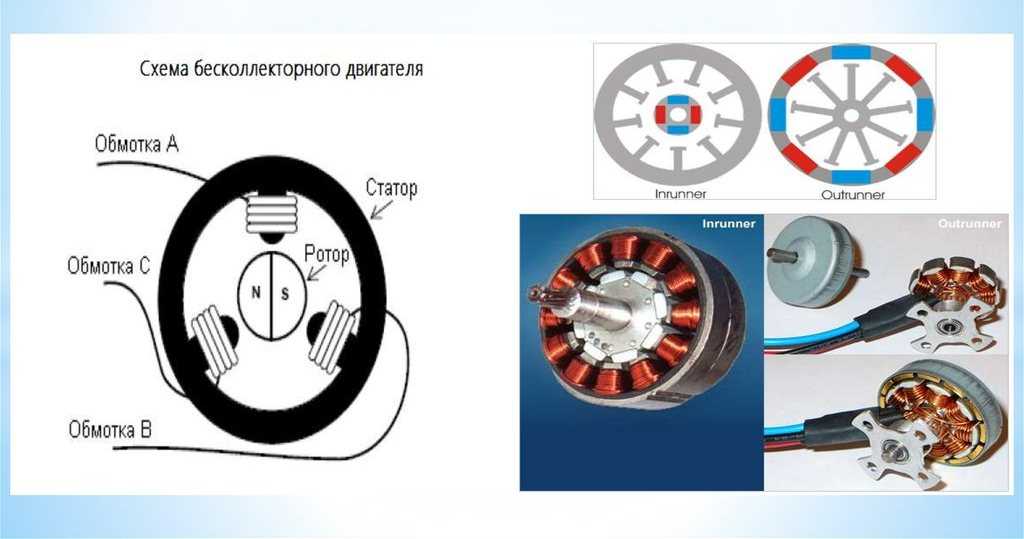 Определение положения ротора также помогает поддерживать стабильный контроль скорости и крутящего момента.
Определение положения ротора также помогает поддерживать стабильный контроль скорости и крутящего момента.
Сводка
В то время как щеточные двигатели постоянного тока имеют щетки и коммутатор, для бесщеточных двигателей постоянного тока требуется схема управления. Два типа двигателей также имеют противоположную конфигурацию в зависимости от того, расположены ли намотанный ламинированный сердечник и постоянный магнит в статоре или в роторе. Эти различные различия следует учитывать при выборе лучшего двигателя для каждого применения.
Решение проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки.
Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
- Разработка двигателей и связанных с ними компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
- Уникальное требование
- Вам нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, обеспечивающий требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Свяжитесь с нами
Ссылки на глоссарий и страницы часто задаваемых вопросов
Бесщеточный или щеточный двигатель: что лучше для ваших электроинструментов?
istockphoto.com
Часто два электроинструмента одного производителя имеют очень похожие характеристики. Единственная явная разница может заключаться в том, что у одного есть щеточный двигатель, а у другого — бесщеточная версия. Последний всегда дороже, поэтому большой вопрос заключается в том, оправдывают ли бесщеточные электроинструменты такие дополнительные затраты.
Мы составили краткое объяснение, в котором основное внимание уделяется обоим типам, а также их плюсам и минусам. Нижеследующее поясняет споры о бесщеточных и щеточных двигателях, чтобы помочь вам сделать лучший выбор с точки зрения производительности и стоимости.
Бесщеточные двигатели больше подходят для аккумуляторных инструментов, чем для проводных.
На первый взгляд, тема щеточных и бесщеточных двигателей охватывает два типа.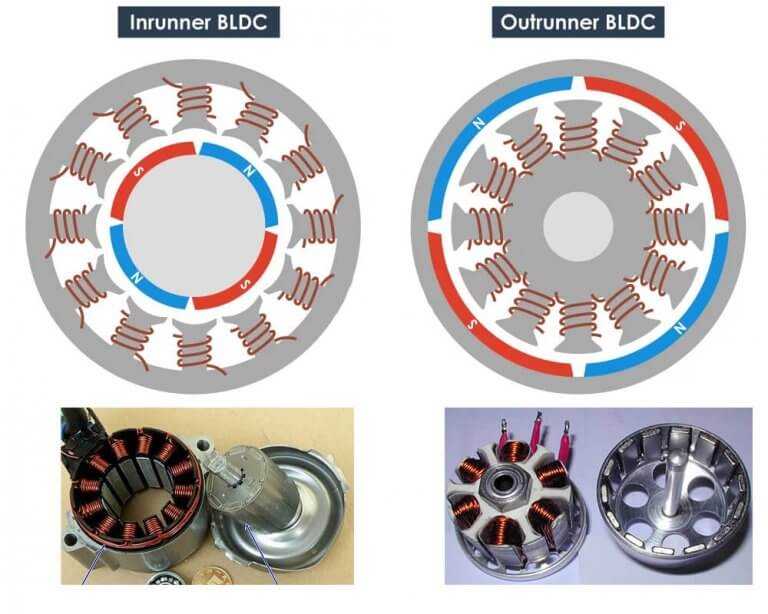 На самом деле существует четыре типа двигателей. Существуют бесщеточные двигатели переменного тока, щеточные двигатели переменного тока, бесщеточные двигатели постоянного тока и щеточные двигатели постоянного тока.
На самом деле существует четыре типа двигателей. Существуют бесщеточные двигатели переменного тока, щеточные двигатели переменного тока, бесщеточные двигатели постоянного тока и щеточные двигатели постоянного тока.
Переменный ток (AC) — это то, что выходит из розетки, поэтому все электроинструменты с питанием от сети должны быть оснащены двигателями переменного тока. Подавляющее большинство — это коллекторные двигатели, проверенная конструкция, используемая на протяжении нескольких поколений. Бесщеточные двигатели переменного тока существуют, но основные преимущества этого типа двигателя больше подходят для аккумуляторных инструментов. Когда они используются, бесщеточные двигатели переменного тока, как правило, встречаются на тяжелых профессиональных инструментах.
Постоянный ток (DC) — это то, что питают аккумуляторы, и оно используется в каждом беспроводном инструменте. Как и в случае с двигателями переменного тока, в инструментах с батарейным питанием могут использоваться как щеточные, так и бесщеточные двигатели постоянного тока (последний также известен как BLDC). Оба типа широко доступны, поэтому чаще всего возникают вопросы о бесщеточных двигателях по сравнению с щеточными.
Оба типа широко доступны, поэтому чаще всего возникают вопросы о бесщеточных двигателях по сравнению с щеточными.
Rel ated: Лучшие наборы электроинструментов
Как работает коллекторный двигатель?Основные компоненты коллекторного двигателя размещены во внешней оболочке, содержащей постоянные (или статорные) магниты. Внутри этой оболочки находится ряд проволочных катушек, называемых якорем. Через середину якоря проходит приводной вал (или ротор), обеспечивающий механический привод. Коллекторный двигатель также имеет коллектор на конце якоря.
Реклама
Когда электричество проходит через якорь, якорь становится магнитным. Если полярность этого магнетизма такая же, как у постоянного магнита, то он отталкивается, заставляя якорь вращаться. Вместе с ним вращается центральный ротор, который приводит в действие патрон, пильный диск и т. д. Однако, когда якорь поворачивается наполовину, полярности будут противоположными. Поскольку противоположные полярности притягиваются, двигатель должен остановиться.
Поскольку противоположные полярности притягиваются, двигатель должен остановиться.
Чтобы предотвратить это и обеспечить работу двигателя, установлены щетки, которые трутся о коллектор. Одна щетка несет положительный заряд, другая отрицательный. Они обеспечивают постоянно меняющуюся полярность якоря, поэтому он продолжает отталкиваться. В результате двигатель продолжает вращаться.
istockphoto.com
Как работает бесщеточный двигатель?Итак, что такое бесщеточный двигатель и что означает бесщеточный двигатель? Бесщеточный двигатель по-прежнему содержит статор, якорь и ротор, но не имеет физического коммутатора. Как следует из названия, он также не содержит кистей.
Эти детали заменены электронной схемой, называемой инвертором. Это создает одно постоянно вращающееся магнитное поле вокруг якоря для создания постоянного движения. Таким образом, двигатель этого типа не нуждается ни в физическом контакте щеток, ни в соответствующем коммутаторе.
Rel ated: Действуйте с осторожностью: 10 электроинструментов, которые могут вас убить
Бесщеточные двигатели более энергоэффективны.
Щетки щеточных двигателей вызывают трение, а это означает, что часть выделяемой ими энергии используется для преодоления этого трения. Трение также приводит к потере напряжения, что снижает количество энергии, приводимой в движение инструментом.
В бесщеточных двигателях отсутствует трение щеток; следовательно, они превращают гораздо больше произведенной электроэнергии в полезную энергию. Это особенно важно для инструментов с батарейным питанием, которые имеют ограниченное количество энергии, доступной на одну зарядку. Например, бесщеточная дрель может работать на 30-50% дольше, чем такая же аккумуляторная дрель, оснащенная щеточным двигателем.
Объявление
У бесколлекторных двигателей есть и другие преимущества. Отсутствие сопротивления или связанного с этим тепловыделения означает, что бесщеточные двигатели могут достигать желаемой скорости быстрее, чем их щеточные аналоги, работать быстрее и дольше и (обычно) обеспечивают больший крутящий момент при эквивалентном потреблении энергии.
Коллекторные двигатели требуют большего обслуживания, чем бесщеточные.
Трение щеток о щеточные коллекторы двигателя приводит к их износу. Очевидными признаками этого являются заикание двигателя или прерывистый пуск и остановка электроинструмента. Замена щеток технически несложна, и детали обычно доступны, но производители электроинструментов не всегда упрощают доступ к двигателю данного инструмента. Как минимум неудобно.
В конце концов, коллекторы также могут изнашиваться, а конструкция двигателя может сделать замену невозможной. Даже если это практично, цена запасных частей может удешевить просто покупку нового инструмента. Особенно это касается бюджетных моделей, в которых чаще используются коллекторные двигатели.
Бесщеточные электроинструменты, напротив, не имеют сменных частей и поэтому не требуют технического обслуживания. Они также, как правило, имеют значительно более длительный срок службы.
Rel ated: Лучшие осциллирующие инструменты
Фото: makitauk.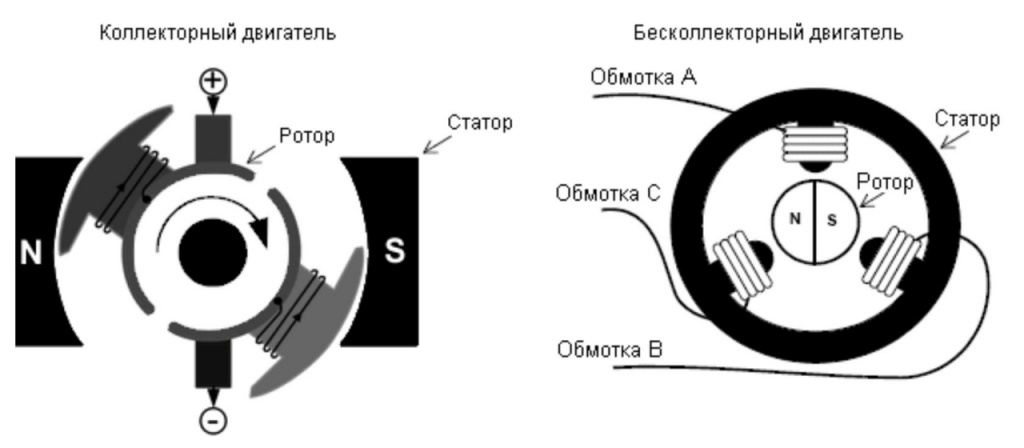 com
com
Бесщеточные двигатели более компактны и работают тише, чем щеточные двигатели.
Отсутствие коммутаторов в бесколлекторных двигателях может сэкономить много места. В частности, бесщеточные дрели можно сделать очень компактными. Это также означает, что, когда физический размер электроинструмента не имеет большого значения, можно использовать более крупный и мощный двигатель. Например, обычно энергоемкие инструменты, такие как перфораторы, могут иметь повышенную производительность при сохранении размеров, аналогичных щеточным двигателям.
Благодаря отсутствию трения и связанной с ним вибрации бесщеточные инструменты работают тише. Хотя это не особенно заметно для дрелей/шуруповертов, лобзиков и шлифовальных машин, это может иметь существенное значение для таких инструментов, как циркулярные пилы и рубанки. Снижение вибрации также помогает сделать такие инструменты, как перфораторы, более удобными в использовании в течение более длительного времени.
Реклама
Безопасность также является важным фактором. Щеточные двигатели могут вызывать искрение, особенно если щетки изнашиваются и контакт становится нестабильным. В некоторых условиях это трение может представлять опасность возгорания или взрыва. Хотя могут потребоваться другие меры предосторожности, бесщеточные двигатели не создают искр, что делает их гораздо более безопасным вариантом.
Щеточные двигатели могут вызывать искрение, особенно если щетки изнашиваются и контакт становится нестабильным. В некоторых условиях это трение может представлять опасность возгорания или взрыва. Хотя могут потребоваться другие меры предосторожности, бесщеточные двигатели не создают искр, что делает их гораздо более безопасным вариантом.
Коллекторные двигатели стоят меньше, чем бесщеточные.
На данный момент все указывает на то, что бесщеточные двигатели являются явным победителем. Однако бесщеточный двигатель не всегда может быть лучшим выбором.
Коллекторные двигатели существуют уже несколько поколений, поэтому они надежны и намного дешевле, чем бесщеточные двигатели. Когда дело доходит до выбора между бесщеточной или щеточной дрелью, последняя может предложить очень похожие характеристики и сопоставимую производительность всего за полцены. То же самое можно сказать и о других типах электроинструментов.
Для профессиональных бесщеточных инструментов способность работать дольше и минимальные требования к обслуживанию могут дать большое преимущество.