
Сериесной двигатель — постоянный ток
Сериесной двигатель — постоянный ток
Cтраница 1
Сериесные двигатели постоянного тока также применяются для привода небольших намоточных барабанов, причем различные величины натяжения получаются за счет изменения сопротивления во внешней сериесной обмотке. [1]
Использование сериесного двигателя постоянного тока в сети переменного тока было бы, однако, не экономичным, так как двигатель имел бы низкий cos p и большие потери в железе статора, потому что статор машины постоянного тока ( полюсы и ярмо — см. рис. 6 — 1) делается из нерасслоенной, литой стали. Поэтому в машинах переменного тока статоры делают из набранных штампованных листов, изолированных друг от друга лаком или тонкой бумагой. [3]
Для сериесных двигателей постоянного тока, обслуживающих механизмы передвижения, применяются Контакторные панели типа П, допускающие автоматический пуск ( в функции времени), торможение противо-включением и изменение направления вращения двигателей.
Изредка для позиционного регулирования используются сериесные двигатели постоянного тока, но рассмотрение их основного уравнения моментов показывает, что, кроме высокой нелинейности, момент не реверсирует при реверсе управляющего напряжения. В этой схеме R является комбинированным сопротивлением обмотки возбуждения и источника управляющего напряжения. [6]
Единичное применение в приводе станков находят сериесные двигатели постоянного тока и шунтовые трехфазные коллекторные двигатели переменного тока. [7]
Какими параметрами сети определялась бы мощность сериесного двигателя постоянного тока, включенного в эту сеть, если бы его обмотка была сделана из сверхпроводника.
Для привода нажимного устройства реверсивных прокатных станов применяются ком-паундные или сериесные двигатели постоянного тока. Компаундный двигатель обеспечивает большую точность остановки. Командо-контроллер нажимного устройства имеет три положения, соответствующие 25, 65 и 100 / 0 скорости. При больших перемещениях валка контроллер устанавливается на третьем положении. При подходе валка к месту установки контроллер переводится на первое положение и скорость двигателей понижается до 25 / 0, чем достигается точная остановка валка. При небольших перемещениях контроллер устанавливается на первом положении. В последнее время начинает применяться автоматическая-остановка нажимных винтов блуминга после прохождения ими заранее заданных на программной панели путей. [10]
Зависимость скорости от момента n / ( / W) носит гиперболический характер, так же как у сериесных двигателей постоянного тока. [11]
[11]
Электрическое торможение применяется сравнительно редко. Реостатное торможение осуществляется в режиме постоянного тока при самовозбуждении (
Электрические двигатели одноковшовых экскаваторов могут работать на постоянном и переменном токе. Характеристика оборудования с сериесными электродвигателями постоянного тока близка к характеристике паровых машин. В сериесных двигателях постоянного тока ( с последовательным возбуждением) при повышении нагрузки увеличивается крутящий момент и уменьшается число оборотов. Электродвигатели постоянного тока допускают перегрузку и, следовательно, легче переносят пиковые нагрузки. [13]
 Из уравнения ( 29 — 39) следует, что при М 0 будет п2 со и при возрастании М скорость вращения двигателя начинает заметно снижаться по кривой, имеющей гиперболический характер. Следовательно, трехфазный последовательный двигатель при возрастании вращающего момента имеет сериесную характеристику скорости, сходную с характеристикой скорости сериесного двигателя постоянного тока.
[14]
Из уравнения ( 29 — 39) следует, что при М 0 будет п2 со и при возрастании М скорость вращения двигателя начинает заметно снижаться по кривой, имеющей гиперболический характер. Следовательно, трехфазный последовательный двигатель при возрастании вращающего момента имеет сериесную характеристику скорости, сходную с характеристикой скорости сериесного двигателя постоянного тока.
[14] Двигатели с последовательным возбуждением применяются более широко, чем шунтовые. Двигатель автоматически приспосабливается к профилю пути, меняя соответственно скорость ( см. фиг. Трамваи во всем мире работают на
Страницы: 1 2
Динамическое торможение — Энциклопедия по машиностроению XXL
При электродинамическом торможении в начальный период динамический момент может превысить статический в 3—8 раз.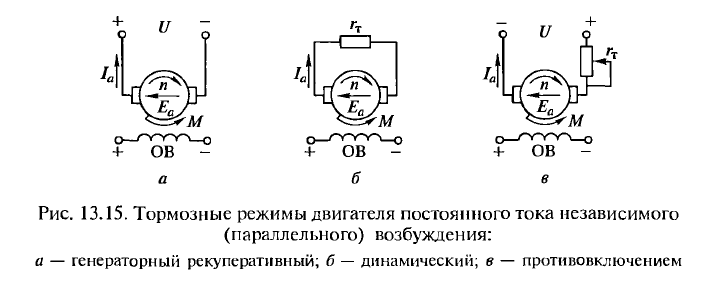 Механические характеристики двигателя МКА-14 в режиме динамического торможения показаны на рис. 8 [116].
Механические характеристики двигателя МКА-14 в режиме динамического торможения показаны на рис. 8 [116].
При динамическом торможении (фиг. 3, г) якорь машины, или её генерирующая обмотка, отъединяется от сети и включается на отдельное тормозное сопротивление. Обмотка возбуждения остаётся присоединённой к сети или получает ток от особой машины — возбудителя. Иногда в машинах постоянного тока применяется самовозбуждение. При динамическом торможении электрическая машина, работая как генератор, получает механическую энергию от приводимого механизма и, превращая её в электрическую, отдаёт её в тормозное сопротивление, где она превращается в тепло (фиг. 3, г). [c.4]
При динамическом торможении тормозной момент
Отсюда сопротивление цепи якоря при динамическом торможении, включая и сопротивление обмотки якоря. [c.7]
Исходя из максимального тока, допустимого по условиям коммутации и максимальной э.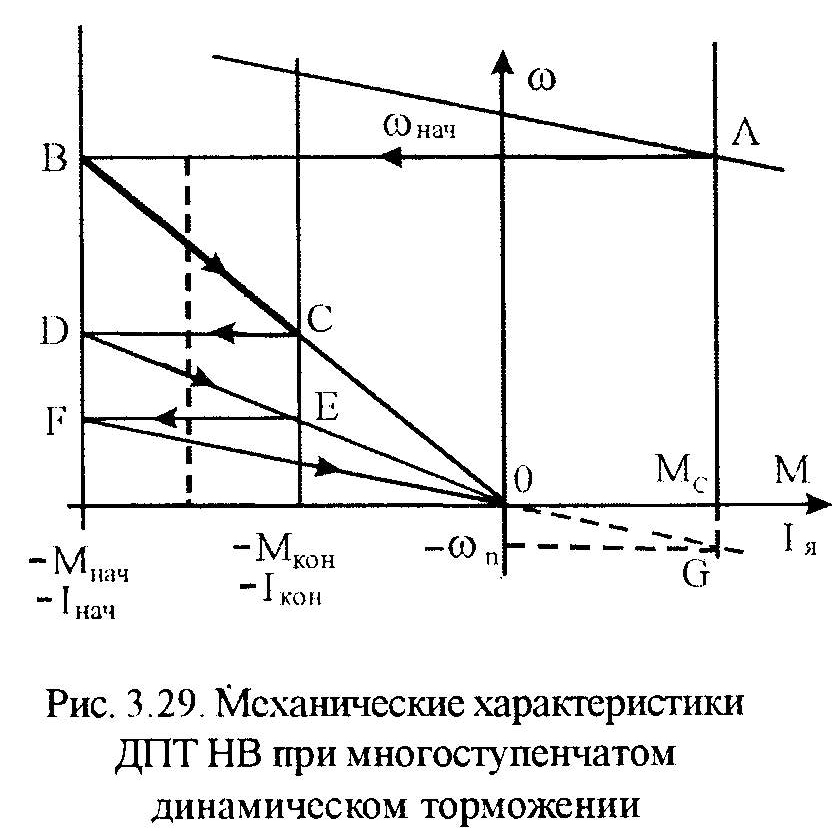 д. с. ео/о, можно по формуле (6) найти величину р%. Характеристики динамического торможения расположены в квадранте //.
[c.8]
д. с. ео/о, можно по формуле (6) найти величину р%. Характеристики динамического торможения расположены в квадранте //.
[c.8]
ВОЙ обмотки. Для торможения компаундных двигателей практически используются два метода— противовключение и динамическое торможение (обычно при отключённой сериесной обмотке).
При динамическом торможении возможны различные варианты включения машины. В двигателях с кольцами постоянный ток подаётся обычно в обмотку статора, отсоединённую предварительно от сети, которая играет роль обмотки возбуждения. Ротор замыкается, как генераторная обмотка, на пусковое сопротивление или на его часть.
[c.
Торможение синхронных двигателей практически можно осуществить лишь двумя способами—противовключением как асинхронного и динамическим торможением. Из-за больших толчков тока в сети противовключение применяется очень редко, преимущественно в приводах непрерывных прокатных заготовочных станов с последующим реверсом для вытягивания застрявшей раскатки. При динамическом торможении отключённая от сети обмотка статора машины, возбуждённой со стороны ротора постоянным током, включается на особый реостат. Рекуперативная работа на сеть в качестве синхронного генератора возможна лишь при синхронной скорости, а потому практического значения для торможения электропривода в обычных схемах не имеет.
Купроксные выпрямители. Купроксные выпрямители служат для выпрямления переменного тока и используются для подачи полученного постоянного тока в схемы управления двигателями или в цепь асинхронных двигателей при динамическом торможении. [c.
 52]
52]Торможение методом противовключения с применением реле нулевой скорости. Динамическое торможение с питанием статорной обмотки постоянным током [c.144]
В СССР наибольшее распространение получили селеновые и купроксные выпрямители, которые применяются для зарядки аккумуляторных батарей, для питания электролитических ванн, для питания цепей управления электромагнитной аппаратуры, для получения постоянного тока при динамическом торможении асинхронных двигателей и т. д.
Уравнения (2) и (3) справедливы для всех режимов работы двигателя. Для противовключения второй член правой части обоих уравнений больше и /г (, для динамического торможения скорость идеального холо- [c.410]
При нормальной схеме включения обмоток двигатель последовательного возбуждения может работать в двигательном режиме пли в режиме торможения противовключением. Режим генераторного торможения с рекуперацией энергии в сеть в этом случае невозможен. Динамическое торможение возможно как по схеме с независимым возбуждением (фиг. 8, а), так и с самовозбуждением (фиг. 8, б).
[c.413]
Динамическое торможение возможно как по схеме с независимым возбуждением (фиг. 8, а), так и с самовозбуждением (фиг. 8, б).
[c.413]
Динамическое торможение может быть получено при отключении статора от сети и питании его постоянным током, В цепь ротора двигателя с фазовым ротором могут быть включены сопротивления. [c.415]
А. Контакторы В — ход вперед, вверх ДТ — динамического торможения КБ — блокировочный НП — промежуточный НФ — форсировки Л — линейный // — ход назад, вниз П — противовключения Т — тормозной У — ускорения УП — управления полем Примечание. Контакторы, управляющие включающими соленоидами высоковольтных выключателей, называются релейными и перед функциональным обозначением выключателя имеют две буквы КР. Например, релейный контактор выключателя нулевой точки обозначается КРН. [c.437]
Для быстрой остановки привода может применяться электрическое торможение динамическое или противовключения. На фиг.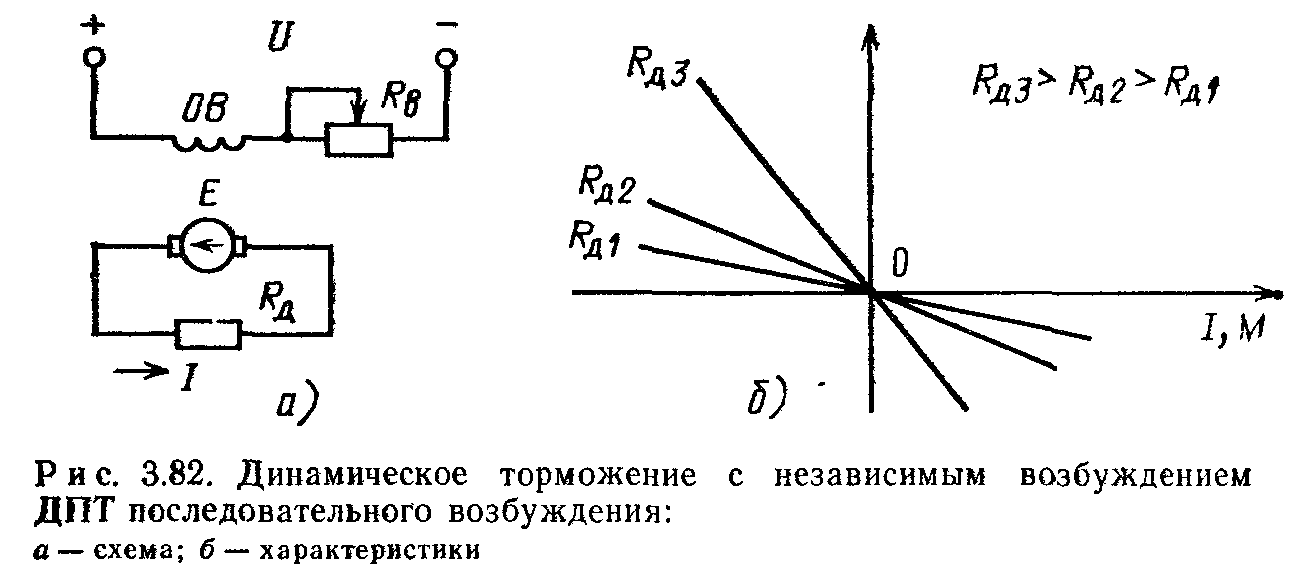 3 дана схема динамического торможения короткозамкнутого двигателя. Пуск двигателя производится обычно кнопкой. При нажатии кнопки Стоп, которая имеет два контакта, двигатель отключается от сети линейным контактором Л, после чего включается тормозной контактор 7, Статор подключается
[c.439]
3 дана схема динамического торможения короткозамкнутого двигателя. Пуск двигателя производится обычно кнопкой. При нажатии кнопки Стоп, которая имеет два контакта, двигатель отключается от сети линейным контактором Л, после чего включается тормозной контактор 7, Статор подключается
[c.439]
Уравнения характеристик динамического торможения [c.502]
Фиг, 4. Схема динамического торможения двигателя постоянного тока параллельного возбуждения. [c.502]
| Фиг. 9. Схема динамического торможения с само-возбужден нем двигателя последовательного возбуждения. |
 504]
504]Фиг, 1U. Схема динамического торможения с независимым возбуждением. [c.505]
Фнг. II. К расчету динамического торможения двигателя постоянного тока. [c.505]
Для двигателей смешанного возбуждения часто применяется динамическое торможение только на шунтовом поле с отключенной последовательной обмоткой, что упрощает схему и ведет к уменьшению количества необходимой аппаратуры. Тормозной момент и ток якоря для этого случая торможения связаны зависимостью [c.506]
При динамическом торможении статор двигателя отключается от сети и подключается к источнику постоянного тока по одной из схем на фиг. 17. [c.508]
При размыкании цепи защиты подъемной машины происходит аварийное включение тормоза. При этом размыкаются контакты 1К и замыкаются контакты 2К и двигатель ПД переходит на режим динамического торможения, вследствие чего рабочий вал 1 толкателя останавливается и груз О опускается вниз, замыкая тормоз. Интенсивность динамического торможения регу-лируетея реостатом ДО. В случае отказа по какой-либо причине системы динамического торможения специальное реле включает уетройство, замыкающее вепомогательный ленточный тормоз ЛТ, шкив которого установлен на рабочем валу толкателя. Замыкание тормоза ЛТ приводит к быстрой остановке рабочего вала толкателя и опу-еканию груза О.
[c.500]
Интенсивность динамического торможения регу-лируетея реостатом ДО. В случае отказа по какой-либо причине системы динамического торможения специальное реле включает уетройство, замыкающее вепомогательный ленточный тормоз ЛТ, шкив которого установлен на рабочем валу толкателя. Замыкание тормоза ЛТ приводит к быстрой остановке рабочего вала толкателя и опу-еканию груза О.
[c.500]
Режимы работы электродвигателей в приводе. В зависимости от процесса и периода работы электродвигателя от него может требоваться движущий или тормозящий момент. В первом случае получается двигательный режим привода (фиг. 3. а), во втором — тормозной режим привода (фиг, 3,5, в и г). Двигательный режим соответствуег нормальной схеме включения данной электрической машины как двигателя. Во всех типах электродвигателей тормозной режим может получаться тремя основными схемами включения 1) генераторным торможением с рекуперацией энергии 2) динамическим торможением 3) торможением противовключением.
 [c.4]
[c.4]Сравнение видов электрического торможения. Рекуперативное торможение можно применять в шунтовых двигателях постоянного тока с регулированием скорости током возбуждения и в короткозамкнутых асинхронных Двигателях с переключением полюсов. Выбор между противовключеняем и динамическим торможением зависит от требуемой быстроты торможения и точности остановки при одинаковых исходных токах в якоре торможение противовключением более эффективно, так как тормозной момент при противо-включении меняется мало, а при динамическом торможении спадает до нуля. Динамическое торможение практически считается наиболее точным. Для реверсивных приводов чаще применяют противовключение, для нереверсивных— динамическое, так как схема последнего проще. [c.8]
В отдельных схемах привода применяют динамическое торможение сериесной машины самовозбуждёиным генератором при работе на отдельное сопротивление. Применение этой схемы ограничено, так как при малых скоростях машина не возбуждается и не даёт тормозного момента, самовозбуждение при некоторой скорости происходит бурно и обусловливает удар на исполнительный механизм. [c.9]
[c.9]
Машина при динамическом торможении работает как синхронный генератор с неподвижными полюсами при переменной частоте. Частота уменьшается по мере снижения скорости. Форма кривой вращающего момента почти одинакова с формой в двигательном режиме [21, 14]. Величина постоянного тока возбуждения зависит от схемы включения обмо- [c.17]
Допустимое число включений короткозамкнутых двигателей в час приходится подсчитывать по средним пусковым и тормозным потерям. Оно зависит от способа торможения двигателя. Если допустимое число пусков при чисто механическом торможении обозначить через 2, то при динамическом торможении оно будет г/г, при торможении противовключе-нием 2/4. Число пусков в час двигателя с механизмом уменьшается по сравнению с числом пусков одного двигателя вхолостую в отно- [c.29]
Несколько особое положение в тормозных режимах электропривода с шунтовым двигателем постоянного тока занимает динамическое торможение. При нём двигатель не приключен к сети, и понятие скольжение здесь становится нецелесообразным. Уравнение электропривода решают, оперируя числом оборотов в минуту. В случае независимого возбуждения машины при Ф = onst момент
[c.40]
При нём двигатель не приключен к сети, и понятие скольжение здесь становится нецелесообразным. Уравнение электропривода решают, оперируя числом оборотов в минуту. В случае независимого возбуждения машины при Ф = onst момент
[c.40]
Автоматизация торможения двигателей. Для торможения электроприводов могут быть использованы в основном три режима 1) про-тивовключение, 2) рекуперация энергии в сеть 3) динамическое торможение. В зависимости от условий работы при всех указанных режимах может быть одна или несколько ступеней сопротивлений торможения. Для перехода от двигательного режима к тормозному могут быть применены те же принципы управления, что и при пуске. [c.67]
Расчёт при переменном статическом моменте можно Вести либо по участкам, заменяя кривую статического момента ступенчатой ломаной, либо по формуле (104) (глава I), полагая GD = onst. Скорость двигателя возрастает до 220—230% номинальной, затем в точке 2 действием контактов путевого выключателя ножниц якори двигателей переключаются на динамическое торможение вследствие выключения контактора 1Л и включения П.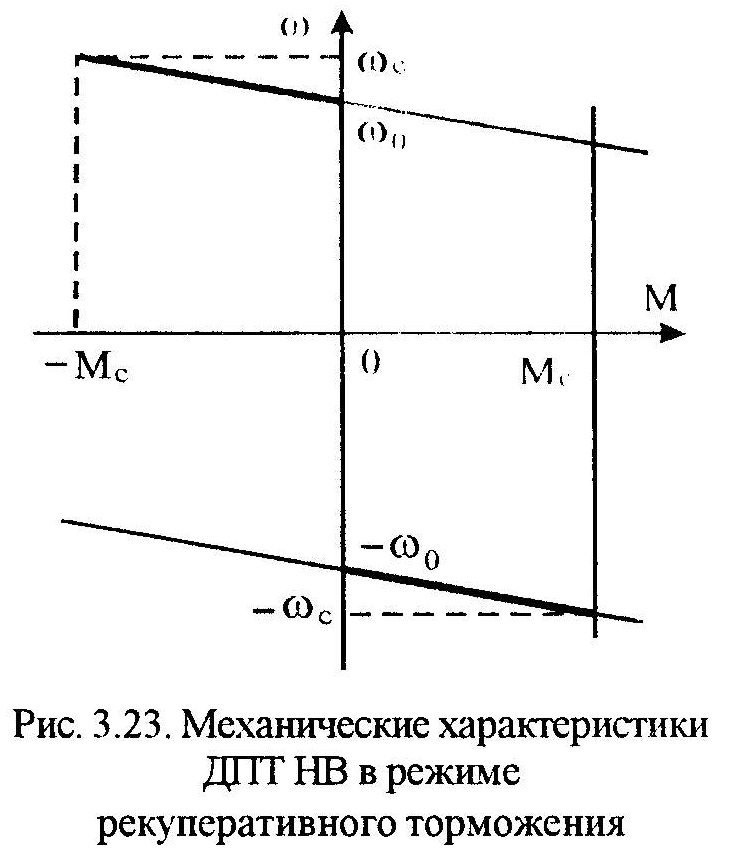 Обмотка же возбуждения остаётся включённой в сеть через сопротивление РК-РЗ вследствие включения контактора k (фиг. 18).
[c.1067]
Обмотка же возбуждения остаётся включённой в сеть через сопротивление РК-РЗ вследствие включения контактора k (фиг. 18).
[c.1067]
Привод станков в большинстве случаев многомоторный. Для привода планшайбы в лёгких и средних станках применяется односкоростной электродвигатель трёхфазного тока в сочетании с коробкой скоростей (фиг. 106, 107), в тяжёлых станках — регулируемый двигатель постоянного тока и трёхступенчатая коробка скоростей (фиг. 108, 109). Для быстрых и установочных движений супортов и поперечины в лёгких станках применяется общий электродвигатель, устанавливаемый обычно на верхнем торце стойки. В тяжёлых станкгх для быстрого перемещения каждого супорта применяется отдельный электродвигатель, устанавливаемый на коробке подач соответствующего супорта. Обычно эти двигатели работают на постоянном токе, что позволяет применить для быстрой остановки супортов динамическое торможение. Перемещение и зажим поперечины обычно осуществляются отдельными электродвигателями,
[c. 310]
310]
Динамическое торможение двигатель н этом случае работает как генератор с самовозбуждением или не- гжмгимым рочбуждением, превращая [c.410]
Характеристики схемы с независимым возбуждением ничем не отличаются от характеристик динамического торможения двигателей параллельного возбуждения. Для схемы с самовозбуждением х.арактеристпки приведены на фиг. 9. [c.413]
Заметим, что для двигателей смешан-ного возбуждения часто применяется динамическое торможение только на шунтовом поле с отключенной последовательной обмоткой, что упрощает схему [c.415]
На фиг. 14 представлены универсальные механические характеристики динамического торможения для краново-ме-таллургических двигателей МТ и МТК [c.416]
Схема динамического торможения приведена на фиг. 4. Характеристика — прямая Е (фиг. 2) — соответствует случаю торможения с начальной скоростью Пт И йоментоК) — Мт. Сопротивление
[c. 502]
502]
Сериесные двигатели — Энциклопедия по машиностроению XXL
Для работы на переменном токе в толкателях применяются быстроходные электродвигатели с короткозамкнутыми роторами. Эти двигатели могут работать без перегрева с большим числом включений в час при любой продолжительности включения Для работы на постоянном токе применяются сериесные двигатели со стабилизирующей шунтовой обмоткой. Срок службы коллекторных щеток таких двигателей при непрерывной работе толкателей составляет 500—800 ч в зависимости от их размеров и характера окружающей среды. [c.455]Сериесные двигатели КПД — Универсальные характеристики 9 — 843 [c.260]
Сериесные двигатели постоянного тока — Автоматизация управления — Схемы 8 — 68 -Контроллерные диаграммы 8—11 Механические характеристики 8 — 9 [c.260]
Это свойство сериесных двигателей особенно ценно для целей тяги и внутризаводского
[c.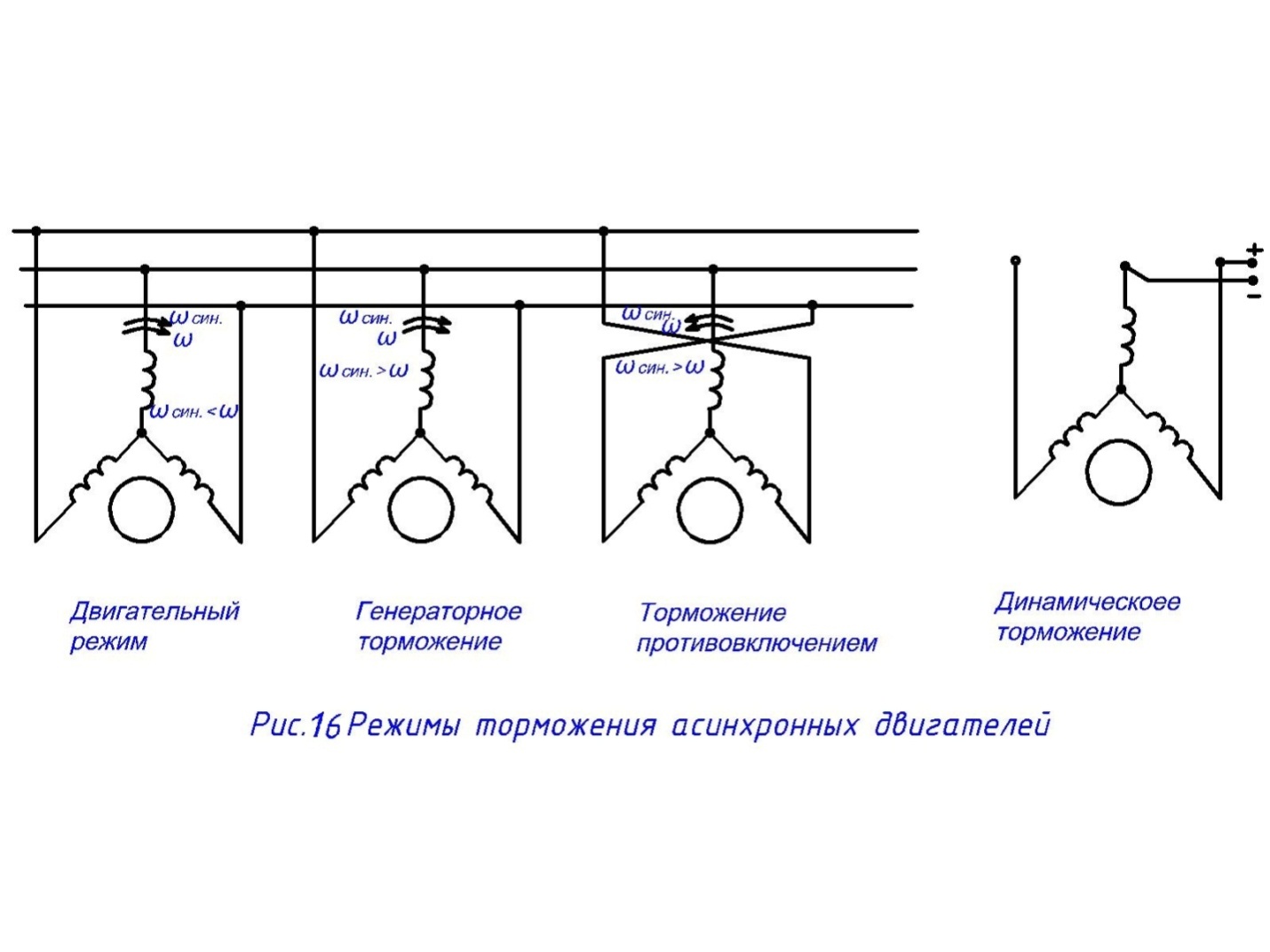 531]
531]
Сериесный электродвигатель. Обмотка возбуждения сериесного двигателя включается последовательно в цепь якоря. Магнитный поток здесь является функцией тока якоря. При увеличении нагрузки сериесный двигатель резко снижает скорость вращения, при разгрузке— повышает. При холостом ходе двигатель идёт. в разнос . Применение сериесного двигателя недопустимо, где возможен его холостой ход. По этой причине недопустима работа его с ремённой передачей. Так как магнитный [c.531]
Изменение тока возбуждения. Регулирование осуществляется без потерь. Изменение скорости шунтового двигателя достигается изменением сопротивления, включаемого последовательно в цепь обмотки возбуждения. Пределы регулирования скорости достигают 1 2 до 1 3. Регулируемые двигатели тяжелее и дороже нерегулируемых. Регулирование скорости сериесных двигателей может быть осуществлено шунтированием обмотки возбуждения или якоря с помощью небольшого сопротивления. Для увеличения скорости вращения ослабляется магнитный поток с помощью шунтирования обмотки возбуждения, шунтирование якоря увеличивает ток обмотки возбуждения по сравнению с током якоря и ведёт к снижению скорости.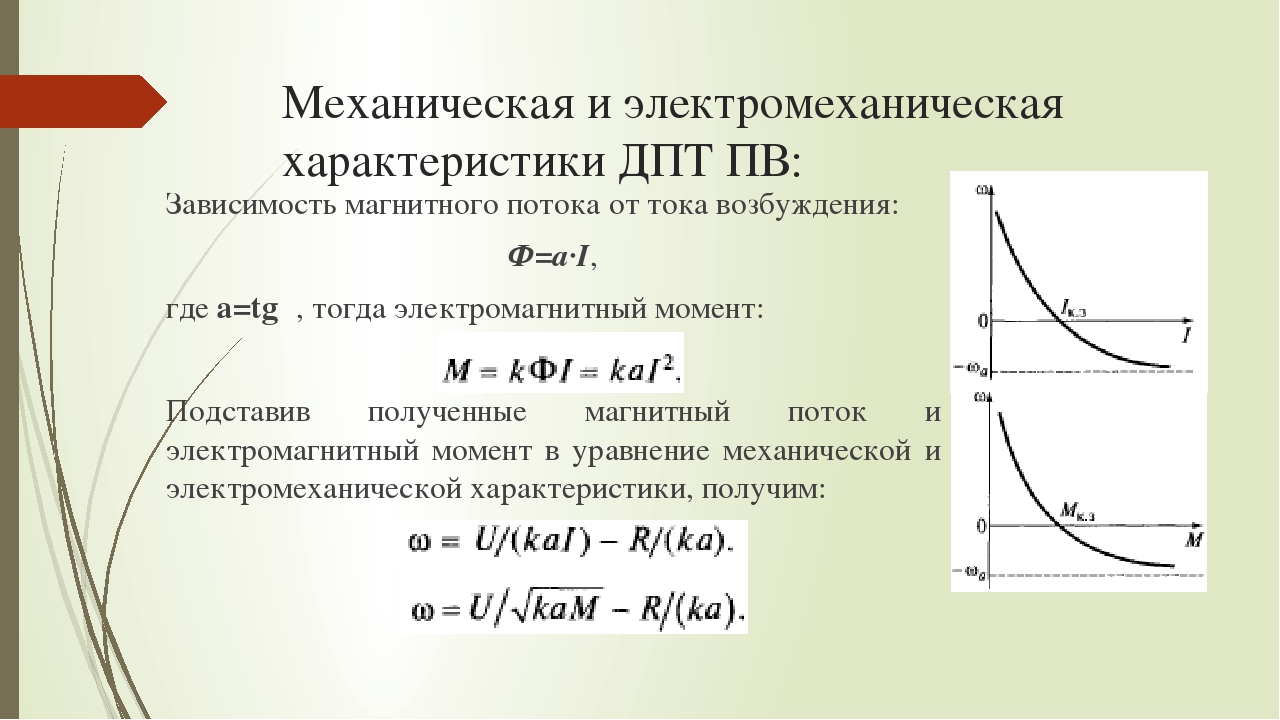 Этот способ регулирования применяется в крановых устройствах.
[c.532]
Этот способ регулирования применяется в крановых устройствах.
[c.532]
Зависимость скорости от момента и =/(Л ) носит гиперболический характер, так же как у сериесных двигателей постоянного тока. [c.540]
Регулирование (ослабление) магнитного потока сериесных двигателей достигается отключением части витков катушек главных полюсов или включением параллельно обмотке возбуждения шунтирующего сопротивления редко (в двигателях электрокар) применяется последовательно-параллельное переключение катушек полюсов. [c.449]Реостатное торможение. Сериесный двигатель в режиме реостатного торможения работает как сериесный генератор. Обмотка возбуждения пли яко])ь предварительно переключаются, чтобы сохранить прежнее направление тока в обмотке возбуждения. В результате в процессе самовозбуждения первоначальное магнитное поле остаточного магнетизма усиливается и электродвижущая сила генератора возрастает вместе с током до тех пор, пока не будет достигнуто равенство [c.
 450]
450]Электромеханические характеристики реостатного торможения для сериесного двигателя показаны на фиг. 9, из которой видно, что характеристики механически устойчивы. [c.451]
Сериесные двигатели при рекуперативном торможении соединяются в схемы с посторонним возбуждением. [c.452]
В тепловозах применяются сериесные двигатели постоянного тока, для которых магнитный поток сФм зависит от тока двигателя [c.582]
В схеме предусмотрен электрический запуск дизеля от аккумуляторной батареи. Для этой цели включают контакторы 8 м9, приключающие генератор к аккумуляторной батарее. В генераторе предусмотрена сериесная пусковая обмотка ПК, не включённая в цепь генератора при нормальной работе и работающая лишь при запуске дизеля. Независимая обмотка Н при запуске отключена. Генератор работает как сериесный двигатель, вращая вал дизеля до тех пор, пока не произойдёт воспламенения топлива и не будет получено достаточное давление смазочного масла. После этого контакторы 8 п 9 размыкаются.
[c.584]
После этого контакторы 8 п 9 размыкаются.
[c.584]
Механические характеристики сериесных двигателей принято представлять графически. В таком виде в каталогах на двигатели даются зависимости скорости вращения п и момента двигателя от тока якоря для естественной характеристики. Исходя из неё возможно построить характеристики я = /(М) для любой схемы включения сериесного двигателя. [c.9]
СТИ переходных стик сериесного двигателя по-процессов, по про- стоянного тока, [c.11]Ввиду сложности электромагнитных про цессов, происходящих в коллекторных машинах, механические характеристики их целесообразнее выражать графически, как и в сериесном двигателе постоянного тока [20, 21, 35]. На фиг. 32 приведены механические характеристики [c.18]
Автоматизация ускорения электроприводов постоянного тока по принципу обратной э. д. с. Соответствующая схема для сериесного двигателя с тремя ступенями сопротивления дана на фиг. 91. При нажатии
[c.65]
д. с. Соответствующая схема для сериесного двигателя с тремя ступенями сопротивления дана на фиг. 91. При нажатии
[c.65]
Автоматизация ускорения по принципу ограничения тока. Схемы по этому принципу могут быть построены с сериесными реле и шунтовыми контакторами или с сериесными контакторами. Соответствующая схема для пуска сериесного двигателя с тремя пусковыми ступенями по первому варианту дана на фиг. 92. Три сериесных реле 1СР, 2СР, ЗСР введены в главную цепь двигателя. Эти реле имеют нормально закрытые контакты. Контакты каждого реле включаются последовательно с катушкой соответствую- [c.65] Савинков Т. С. Графические методы построения диаграммы нагрузки электроприводов с сериесным двигателем при Мс =Мс(Ь). Вестшт электропромышленности , 1948, № 5. [c.235]
Сериесные двигатели постоянного токв крановые КПД Динамо — Механические характеристики 8 — 9
[c. 260]
260]
Компаундный электродвигатель. Ком-паундный электродвигатель имеет шунтовую и последовательную обмотки возбуждения. В зависимости от того, какая обмотка преобладает, характеристики его могут приближаться к характеристикам шунтового или сериесного двигателя. Часто шунтовые двигатели снабжаются последовательной обмоткой для улучшения их пусковых свойств. Обычно небольшой последовательной обмоткой снабжаются шунтовые двигатели для получения устойчивой работы при переменной нагрузке. Это особенно необходимо при широкой регу- [c.531]
Сериесные двигатели (фиг. 1) имеют одну обмотку возбуждения, включённую последовательно с якорем. Ампервитки обмотки возбуждения пропорциональны току нагрузки А 1 а = где Шс — число витков сериесной обмотки возбуждения. Увеличение нагрузки сериес-уного двигателя сопровождается возрастанием магнитного потока,вследствие чего скорость уменьшается усилие тяги интенсивно возрастает пропорционально произведению/Ф.
[c. 446]
446]
Сравнение характеристик [3]. Характеристики сериесных двигателей наиболее отвечают требованиям, предъявляемым к электро-подвижному составу. Падающая скоростная характеристика обеспечивает снижение скорости на подъёмах, смягчающее перегрузку самих двигателей и системы энергоснабжения и целесообразное в отношении условий сцепления на лёгких элементах профиля скорость автоматически повышается. Принудительное усиление магнитного потока при увеличении нагрузки обеспечивает надёжную коммутацию. Сериесные двигатели дают достаточно малые расхождения нагрузок отдельных двигателей электроподвижного состава и локомотивов одного поезда при расхождениях характеристик и дают меньшие толчки нагрузки и тягового усилия при колебаниях напряжения сети. При равных условиях сериесные двигатели имеют наименьший вес и габаритные размеры благодаря высокому коэфициенту заполнения се-риесиой обмотки. [c.446]
Электрическое тор.можение применяется сравнительно редко. Реостатное торможение осуществляется в режиме постоянного тока при самовозбуждении (подобно сериесным двигателям постоянного тока), а также в ре-жи.ме переменного тока при независи.мом возбуждении от трансформатора. В последнем случае для регулирования скорости используются те же ступени трансформатора и та же аппаратура, что и при моторном режиме [4].
[c.455]
Реостатное торможение осуществляется в режиме постоянного тока при самовозбуждении (подобно сериесным двигателям постоянного тока), а также в ре-жи.ме переменного тока при независи.мом возбуждении от трансформатора. В последнем случае для регулирования скорости используются те же ступени трансформатора и та же аппаратура, что и при моторном режиме [4].
[c.455]
Экономические ступени скорости осуществляются переключением числа полюсов и каскадным включением двух двигателей. Число ступеней две-три, редко больше трёх. Наличие нескольких ступеней позволяет в известной степени приблизиться к свойствам сериесного двигателя путём перехода на тяжёлых участках пути на низшие ступени. Однако малое число ступеней ограничивает эту возможность, в связи с чем при равных средних скоростях движения мощность асинхронных двигателей должна быть на 20—ЗОО/д больше, чем сериес-ных двигателей. [c.456]
Механические характеристики сериес-ного двигателя постоянного тока. Механические характеристики сериесных двигателей аналитически нельзя выразить, так как в этих двигателях магнитный поток не остаётся постоянным, а кривая намагничивания железа Ф = /(/) не может быть представлена простой аналитической зависимостью.
[c.9]
Механические характеристики сериесных двигателей аналитически нельзя выразить, так как в этих двигателях магнитный поток не остаётся постоянным, а кривая намагничивания железа Ф = /(/) не может быть представлена простой аналитической зависимостью.
[c.9]
Фиг, 10. Естестнеяная и искусственные механические характеристики сериесного двигателя типа КПД. [c.9]
Механические характеристики сериес-ного двигателя в сложных схемах его включения. Весьма разнообразные практические условия работы электроприводов требуют сериесных двигателей со значительно большим разнообразием характеристик по сравнению с тем, которое даётся простой схемой с последовательно включёнными сопротивлениями. Такие характеристики нужны для получения малых (ползучих) скоростей порядка 500/о от номинальной, для ограничения возможности разноса при отрицательных статических моментах (движение груза вниз), для достижения более высоких скоростей, чем те, которые даёт естественная характеристика. Все эти задачи решаются сложными схемами включения с шунтированием якоря и обмотки возбуждения.
[c.10]
Все эти задачи решаются сложными схемами включения с шунтированием якоря и обмотки возбуждения.
[c.10]
МОТКИ ротора активного и реактивного сопро-тивлений. Наиболее резко это сказывается в двигателях с глубокой впадиной и в двигателях Бушеро. На фиг. 27 а — типичная характеристика момента обыкновенного короткозамкнутого двигателя, б—двигателя Бушеро, в—двигателя с глубоким пазом. Возможен ряд других аналогичных вариантов характеристик. Для целей привода эти характеристики, как и характеристики сериесных двигателей постоянного тока, следует давать графически. На фиг. 28 приведены типичные характеристики двигателей, используемых в некоторых металлорежущих станках в США. [c.16]
Двигатели постоянного тока, питаемые от постоянного напряжения а) шунтовые б) сериесные в) компаундные До 1 3 я даже до 1 4 с получением заправочных и ползучих скоростей Плавный наименее плавный — в сериес-ных двигателях Практически ограничений нет Наименее экономично регулирование в сериесных двигателях.
 Получение очень низких скоростей сопряжено с потерями. Подходят для повторнократковременного режима
[c.21]
Получение очень низких скоростей сопряжено с потерями. Подходят для повторнократковременного режима
[c.21]Контроллерные диаграммы. Каждая автоматическая схема имеет несколько характерных положений замыкания её элементов. Возьмём для примера нереверсивный сериес-ный двигатель постоянного тока, предназначенный для пуска в одну сторону по трём механическим характеристикам. Схема будет иметь четыре характерных положения включения её автоматических аппаратов а) покой б, в, г) работа на первой, второй и третьей характеристиках. Для уяснения основных условий работы схемы автоматизированного электропривода служит контроллерная диаграмма, Она показывает число типичных положений схемы, число включённых в неё главных аппаратов и какие аппараты включены при каждом положении. Для иллюстрации на фиг. 86 показана схема главной цепи реверсивного сериесного двигателя с двумя парами реверсирующих контакторов, из ко- [c.62]
Однако, самым совершенным и наиболее распространённым аппаратом для получения независимой выдержки времени является электромагнитное реле времени РЭ.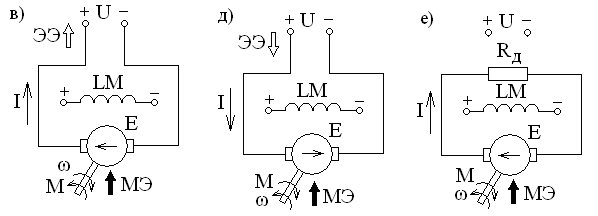 Схема пуска реверсивного сериесного двигателя с тремя пусковыми ступенями сопротивления представлена на фиг. 94. Для упрощения на схеме не показаны цепи катушек реверсирую1цих контакторов и кнопки управления. Нормально закрытые блок-контакты контакторов В или Н отключаютреле/РУипоследнее с определённой
[c.66]
Схема пуска реверсивного сериесного двигателя с тремя пусковыми ступенями сопротивления представлена на фиг. 94. Для упрощения на схеме не показаны цепи катушек реверсирую1цих контакторов и кнопки управления. Нормально закрытые блок-контакты контакторов В или Н отключаютреле/РУипоследнее с определённой
[c.66]
| Переменный | AC-1 | Электроцепи сопротивления; неиндуктивная или малоиндуктивная нагрузка |
| AC-2 | Пуск и торможение противовключением электродвигателей с фазным ротором | |
| AC-3 | Прямой пуск электродвигателей с короткозамкнутым ротором, отключение вращающихся двигателей | |
| AC-4 | Пуск и торможение противовключением электродвигателей с короткозамкнутым ротором | |
| AC-11 | Управление электромагнитами переменного тока | |
| AC-20 | Коммутация электрических цепей без тока или с незначительным током | |
| AC-21 | Коммутация активных нагрузок, включая умеренные перегрузки | |
| AC-22 | Коммутация смешанных активных и индуктивных нагрузок, включая умеренные перегрузки | |
| AC-23 | Коммутация нагрузок двигателей или других высокоиндуктивных нагрузок | |
| Переменный и постоянный | A | Отключение электрических цепей в условиях короткого замыкания при отсутствии специальной избирательности (селективности) по времени относительно последовательно соединенных нижестоящих на стороне нагрузки аппаратов |
| B | Отключение электрических цепей в условиях короткого замыкания при наличии специальной избирательности (селективности) по времени относительно последовательно соединенных нижестоящих на стороне нагрузки аппаратов | |
| Постоянный | DC-1 | Электропечи сопротивления; неиндуктивная или малоиндуктивная нагрузка |
| DC-2 | Пуск электродвигателей с параллельным возбуждением и отключение вращающихся двигателей с параллельным возбуждением | |
| DC-3 | Пуск электродвигателей с параллельным возбуждением, отключение неподвижных или медленно вращающихся электродвигателей, торможение противовключением | |
| DC-4 | Пуск электродвигателей с последовательным возбуждением и отключение вращающихся электродвигателей с последовательным возбуждением | |
| DC-5 | Пуск электродвигателей с последовательным возбуждением, отключение неподвижных или медленно вращающихся двигателей, торможение противовключением | |
| DC-11 | Управление электромагнитами постоянного тока | |
| DC-20 | Включение и отключение цепи без нагрузки или с незначительным током | |
| DC-21 | Коммутация активных нагрузок, включая умеренные перегрузки | |
| DC-22 | Коммутация смешанных активных и индуктивных нагрузок, включая умеренные перегрузки, например, двигателей с параллельным возбуждением | |
| DC-23 | Коммутация высокоиндуктивных нагрузок, например, двигателей с последовательным возбуждением |
Реверсирование двигателя постоянного тока — ООО «СЗЭМО Электродвигатель»
Часто для выполнения определенной задачи требуется осуществить реверсирование двигателя постоянного тока. Термин «реверсирование» обозначает изменение направления вращения мотора агрегата. Добиться этого можно, изменив направление действия вращающего момента. Направление магнитного потока электродвигателя постоянного тока изменяется двумя способами:
Термин «реверсирование» обозначает изменение направления вращения мотора агрегата. Добиться этого можно, изменив направление действия вращающего момента. Направление магнитного потока электродвигателя постоянного тока изменяется двумя способами:- переключением обмотки возбуждения;
- переключением якоря.
Процесс реверсирования двигателя постоянного тока
Реверс двигателя постоянного тока с параллельным возбуждением выглядит следующим образом:- Якорь отключается от источника питания.
- Двигатель переключается для торможения или тормозится механически.
- Якорь переключается либо в процессе торможения, либо после полного окончания торможения.
- Осуществляется пуск механизма, и двигатель начинает вращаться в противоположном направлении.
Пуск и торможение двигателя постоянного тока
Способ пуска двигателя постоянного тока зависит от его мощности. Прямое включение допускается только для агрегатов малой мощности. Во всех остальных случаях используется пусковой реостат, ограничивающий ток до допустимых значений. Пусковой реостат представляет собой разделенную на секции ленту (или провод) с высоким удельным сопротивлением.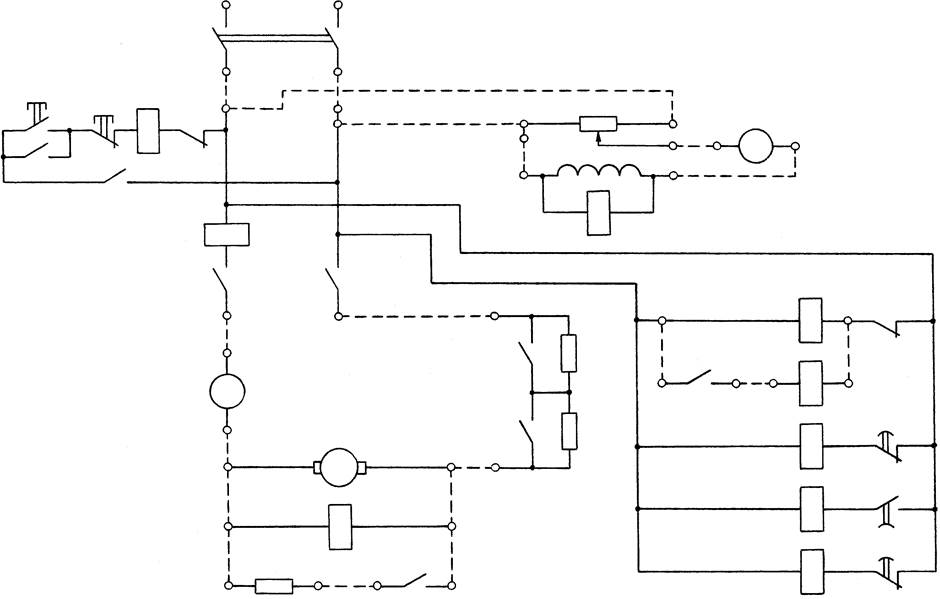 В местах перехода установлены медные плоские или кнопочные контакты, к которым присоединяются провода. При пуске двигателя сопротивление реостата должно последовательно уменьшаться – для этого рычаг переводится с одного неподвижного контакта на другой и секции выключаются. Существует два способа торможения двигателей постоянного тока:
В местах перехода установлены медные плоские или кнопочные контакты, к которым присоединяются провода. При пуске двигателя сопротивление реостата должно последовательно уменьшаться – для этого рычаг переводится с одного неподвижного контакта на другой и секции выключаются. Существует два способа торможения двигателей постоянного тока:- Механическое торможение, применяемое при отсутствии ограничений времени и тормозного пути. При его выполнении тормозные колодки накладываются на тормозной шкив.
- Электрическое торможение, обеспечивающее точный тормозящий момент. Поскольку фиксация механизма в нужном месте невозможна, часто оно дополняется механическим.
- С возвратом энергии в сеть. Кинетическая энергия при этом преобразовывается в электрическую, часть которой возвращается в сеть.
- При противовключении. Вращающийся двигатель переключается на противоположное направление вращения.

- Динамическое. При этом происходит рассеивание электрической энергии в цепи якоря.
| Переменный AC | АС-1 | Неиндуктивные или слабоиндуктивные нагрузки, печи сопротивления |
| АС-2 | Двигатели с контактными кольцами: пуск, отключение | |
| АС-3 | Двигатели с короткозамкнутым ротором: пуск, отключение без предварительной остановки1) | |
| АС-4 | Двигатели с короткозамкнутым ротором: пуск, торможение противотоком, повторно-кратковременные включения | |
| АС-5а | Коммутирование разрядных электроламп | |
| АС-5b | Коммутирование ламп накаливания | |
| АС-6а | Коммутирование трансформаторов | |
| АС-6b | Коммутирование батарей конденсаторов | |
| А7а3) | Слабоиндуктивные нагрузки бытового и аналогичных назначений | |
| АС-7b3) | Двигательные нагрузки бытового назначения | |
| АС-8а | Управление герметичными двигателями компрессоров холодильников с ручным взводом расцепителей перегрузки2) | |
| АС-8b | Управление герметичными двигателями компрессоров холодильников с автоматическим взводом расцепителей перегрузки2) | |
| Постоянный DC | DC-1 | Неиндуктивные или слабоиндуктивные нагрузки, печи сопротивления |
| DC-3 | Шунтовые двигатели: пуск, торможение
противотоком, повторно-кратковременные включения.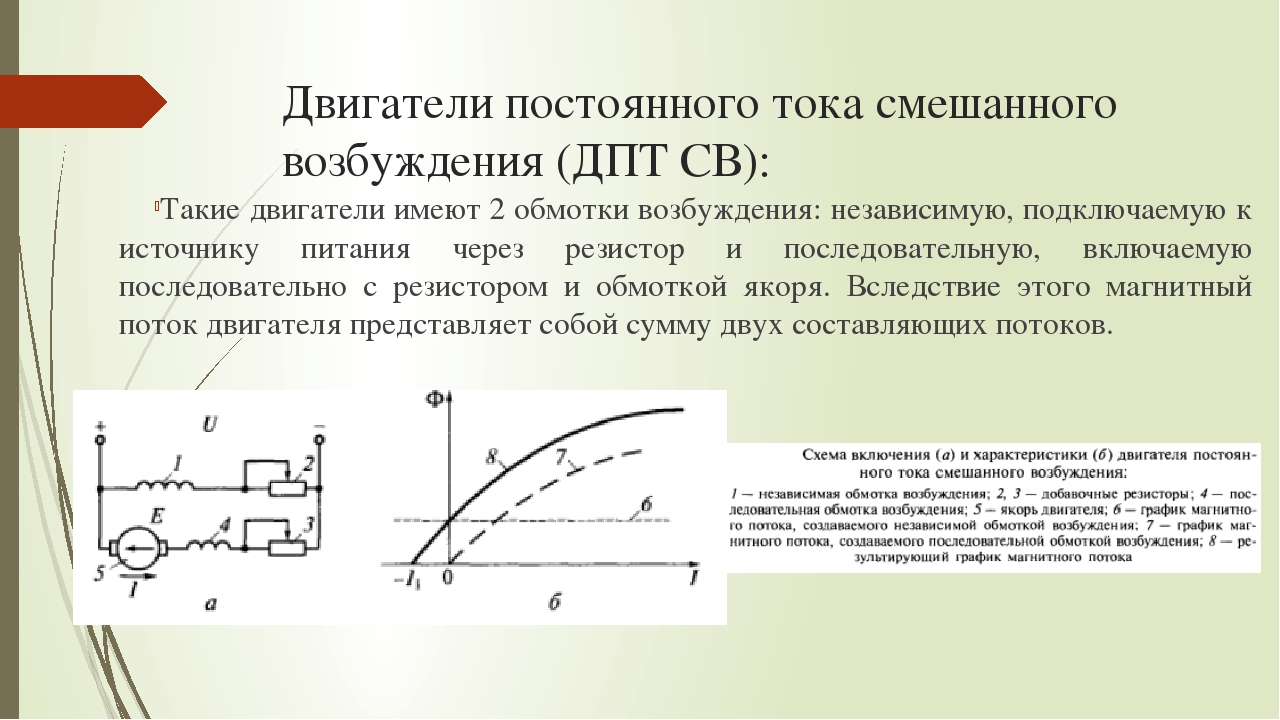 Динамическое отключение двигателей постоянного тока
Динамическое отключение двигателей постоянного тока |
|
| DC-5 | Сериесные двигатели: пуск, торможение противотоком, повторно-кратковременные включения. Динамическое отключение двигателей постоянного тока | |
| DC-6 | Коммутирование ламп накаливания | |
| 1) Категория АС-3 может предусматривать случайные повторно-кратковременные включения или торможение противотоком ограниченной длительности, например при наладке механизма; в эти ограниченные периоды число срабатываний не должно превышать пяти в 1 мин или более 10 за 10 мин. | ||
| 2) Герметичный двигатель компрессора холодильника представляет собой комбинацию компрессора и двигателя, заключенную в одну оболочку, без наружного вала или его уплотнения, причем двигатель работает в холодильнике. | ||
3) Для АС-7а и АС-7b смотрите ГОСТ Р 51731. |
||
Электродвигатель постоянного тока общие сведения
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Как устроены электродвигатели постоянного тока
Работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. Из основ электротехники известно, что на проводник с током, помещенный в магнитное поле, действует сила, определяемая по правилу левой руки:
F = BIL,
где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводится электродвижущая сила, которая по отношению к току в проводнике направлена против него, поэтому она называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
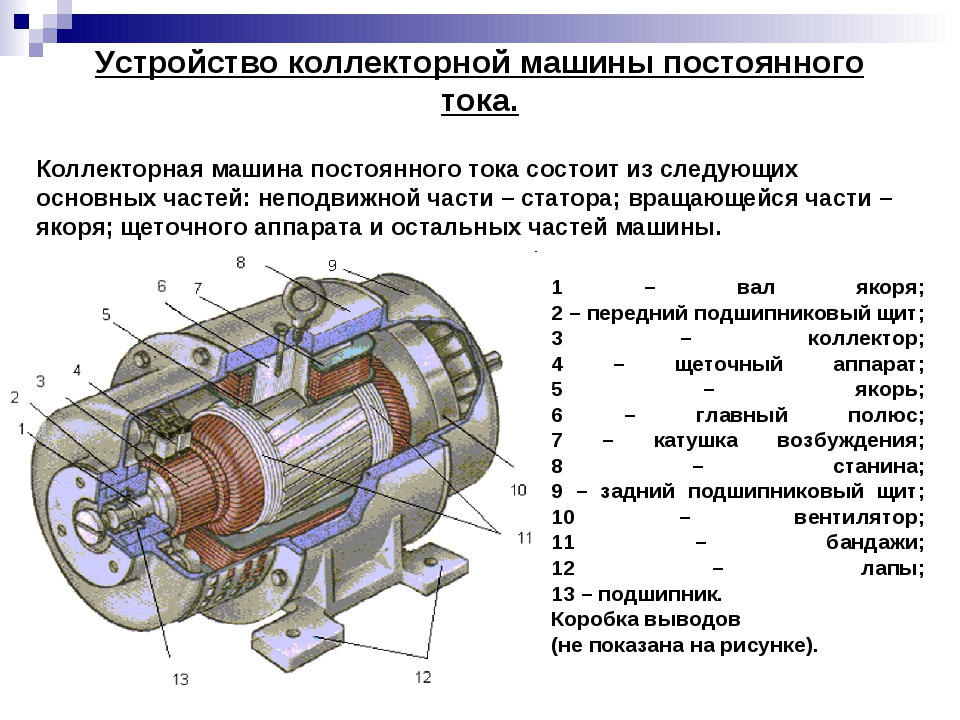
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах — специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя.
Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя.
Коммутация в электродвигателях постоянного тока
В процессе работы электродвигателя постоянного тока щетки, скользя по поверхности вращающегося коллектора, последовательно переходят с одной коллекторной пластины на другую. При этом происходит переключение параллельных секций обмотки якоря и изменение тока в них. Изменение тока происходит в то время, когда виток обмотки замкнут щеткой накоротко. Этот процесс переключения и явления, связанные с ним, называются коммутацией.
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток.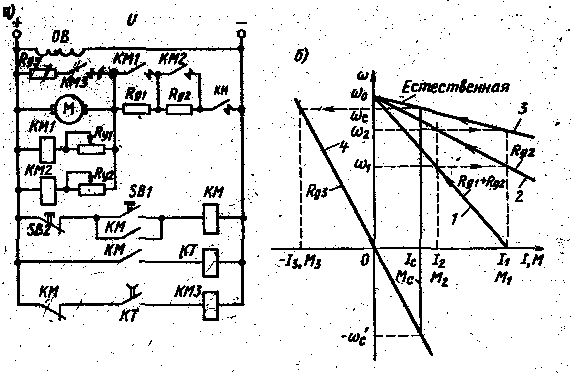 Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.
Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.
Способы возбуждения электродвигателей постоянного тока
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя. Схемы возбуждения электродвигателей постоянного тока показаны на рисунке.
Схемы возбуждения электродвигателей постоянного тока: а — независимое, б — параллельное, в — последовательное, г — смешанное
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы:
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.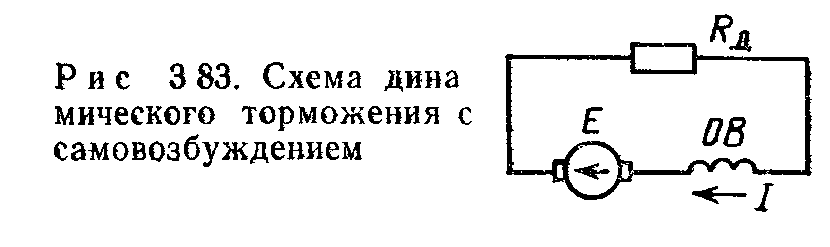
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с. инапряжение в якоре равна нулю, поэтому Iп = U / Rя.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 — 20 раз и более номинальный. Это может вызвать значительные электродинамические усилия в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью пусковых реостатов — активных сопротивлений, включаемых в цепь якоря.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи.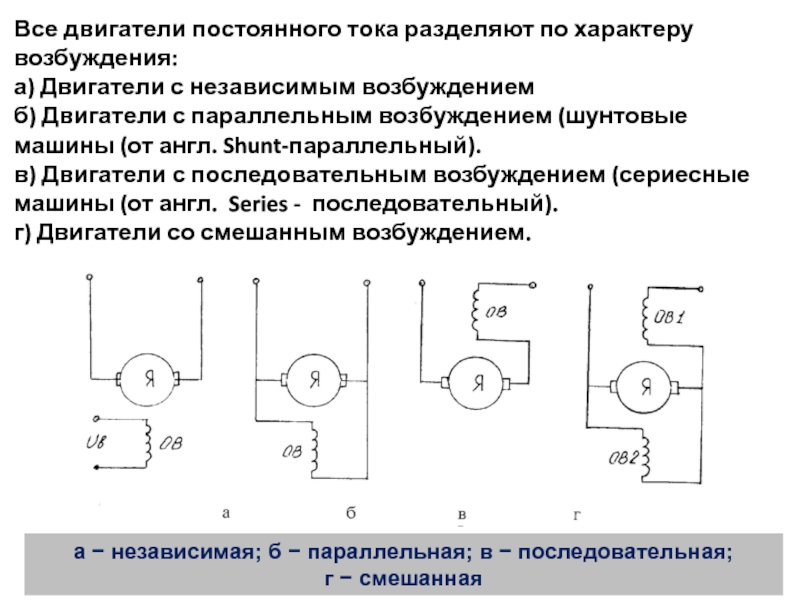 Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
где U — напряжение питающей сети; Iя — ток якоря; Rя — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
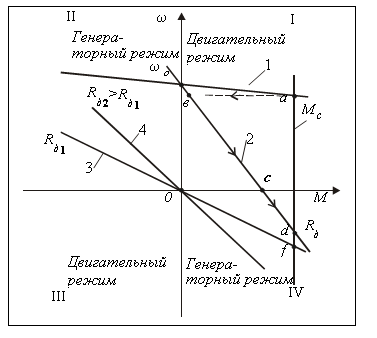
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко: он неэкономичен, скорость двигателя при этом значительно зависит от колебаний нагрузки. Механические характеристики, которые при этом получаются, показаны на рисунке.
Механические характеристики электродвигателя постоянного тока при различных способах регулирования частоты вращения
Жирная прямая — это естественная зависимость скорости от момента на валу, или, что то же, от тока якоря. Прямая естественной механической характеристики несколько отклоняется от горизонтальном штриховой линии. Это отклонение называют нестабильностью, нежесткостью, иногда статизмом. Группа непаралельных прямых I соответствует регулированию скорости возбуждением, параллельные прямые II получаются в результате изменения напряжения якоря, наконец, веер III — это результат введения в цепь якоря активного сопротивления.
Прямая естественной механической характеристики несколько отклоняется от горизонтальном штриховой линии. Это отклонение называют нестабильностью, нежесткостью, иногда статизмом. Группа непаралельных прямых I соответствует регулированию скорости возбуждением, параллельные прямые II получаются в результате изменения напряжения якоря, наконец, веер III — это результат введения в цепь якоря активного сопротивления.
Величину тока возбуждения двигателя постоянного тока можно регулировать с помощью реостата или любого устройства, активное сопротивление которого можно изменять по величине, например транзистора. При увеличении сопротивления в цепи ток возбуждения уменьшается, частота вращения двигателя увеличивается. При ослаблении магнитного потока механические характеристики располагаются выше естественной (т. е. выше характеристики при отсутствии реостата). Повышение частоты вращения двигателя вызывает усиление искрения под щетками. Кроме того, при работе электродвигателя с ослабленным потоком уменьшается устойчивость его работы, особенно при переменных нагрузках на валу. Поэтому пределы регулирования скорости таким способом не превышают 1,25 — 1,3 от номинальной.
Поэтому пределы регулирования скорости таким способом не превышают 1,25 — 1,3 от номинальной.
Регулирование изменением напряжения требует источника постоянного тока, например генератора или преобразователя. Такое регулирование используют во всех промышленных системах электропривода: генератор — двигатель постоянного тока (Г — ДПТ), электромашинный усилитель — двигатель постоянного тока (ЭМУ — ДПТ), магнитный усилитель — двигатель постоянного тока (МУ — ДПТ), тиристорный преобразователь — двигатель постоянного тока (Т — ДПТ).
Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Динамическое торможение электродвигателя постоянного тока осуществляется путем замыкания обмотки якоря двигателя накоротко или через резистор. При этом электродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г — ДПТ и ЭМУ — ДПТ.
В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г — ДПТ и ЭМУ — ДПТ.
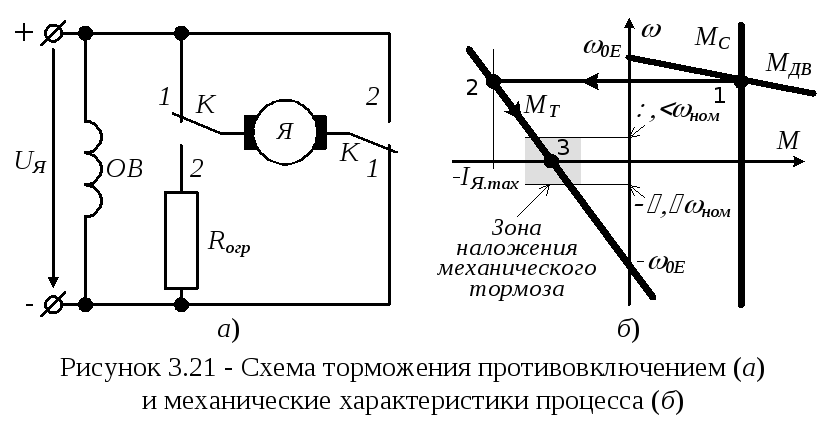
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Когда и как мне выбирать тормозной резистор?
При проектировании системы управления двигателем не всегда ясно, требуется ли тормозной резистор, и если да, то как действовать при выборе тормозного резистора. Этот пост призван упростить этот процесс, чтобы было ясно, когда и как выбирать тормозной резистор.
Когда и как выбирать тормозной резистор?
Майк Киф | КЭБ
Выбор тормозного резистора — ключевой компонент при оптимизации приложения VFD
Зачем нужны тормозные резисторы?
Тормозные резисторы вводятся в систему управления двигателем, чтобы предотвратить повреждение оборудования и / или нежелательные сбои в ЧРП. Они необходимы, потому что при определенных операциях двигатель, управляемый частотно-регулируемым приводом, действует как генератор, и мощность возвращается обратно к частотно-регулируемому приводу, а не к двигателю. Двигатель будет действовать как генератор всякий раз, когда возникает ремонтная нагрузка (например, поддержание постоянной скорости, поскольку силы тяжести пытаются ускорить лифт, когда он движется вниз) или привод используется для замедления двигателя. Это вызывает повышение напряжения на шине постоянного тока привода и приведет к сбоям из-за перенапряжения в приводе, если генерируемая энергия не рассеивается.
Они необходимы, потому что при определенных операциях двигатель, управляемый частотно-регулируемым приводом, действует как генератор, и мощность возвращается обратно к частотно-регулируемому приводу, а не к двигателю. Двигатель будет действовать как генератор всякий раз, когда возникает ремонтная нагрузка (например, поддержание постоянной скорости, поскольку силы тяжести пытаются ускорить лифт, когда он движется вниз) или привод используется для замедления двигателя. Это вызывает повышение напряжения на шине постоянного тока привода и приведет к сбоям из-за перенапряжения в приводе, если генерируемая энергия не рассеивается.
Тормозные резисторы регулируют уровень шины постоянного тока ниже порога ошибки
Есть несколько основных способов справиться с энергией, вырабатываемой двигателем. Во-первых, у самого привода будет емкость, чтобы поглотить некоторое количество этой энергии в течение небольшого промежутка времени. Обычно это случается, когда отсутствуют ремонтные нагрузки и быстрое замедление не требуется.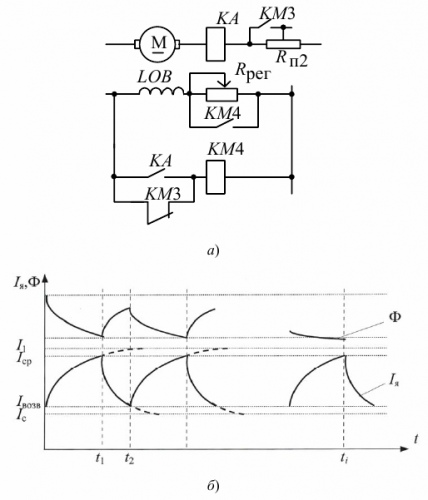 Если есть участки рабочего цикла, где генерируемая энергия слишком велика для одного привода, то можно использовать тормозной резистор.Тормозной резистор рассеивает избыточную энергию, преобразуя ее в тепло на резистивном элементе. Наконец, если регенерируемая энергия от двигателя является непрерывной или нагрузка высока, то может быть более выгодным использовать блок рекуперации, а не тормозной резистор. Это по-прежнему будет защищать частотно-регулируемый привод от повреждения оборудования и нежелательных сбоев, но позволяет пользователю улавливать и повторно использовать электрическую энергию, а не рассеивать ее в виде тепла.
Если есть участки рабочего цикла, где генерируемая энергия слишком велика для одного привода, то можно использовать тормозной резистор.Тормозной резистор рассеивает избыточную энергию, преобразуя ее в тепло на резистивном элементе. Наконец, если регенерируемая энергия от двигателя является непрерывной или нагрузка высока, то может быть более выгодным использовать блок рекуперации, а не тормозной резистор. Это по-прежнему будет защищать частотно-регулируемый привод от повреждения оборудования и нежелательных сбоев, но позволяет пользователю улавливать и повторно использовать электрическую энергию, а не рассеивать ее в виде тепла.
Что следует учитывать при выборе тормозного резистора?
После того, как было решено, что для данного приложения необходим тормозной резистор, при выборе резистора необходимо учитывать два основных фактора: значение сопротивления и мощность рассеивания резистора.
Минимальное значение сопротивления
ПЧ, в которых используется тормозной резистор, также будут иметь «цепь прерывателя» или тормозной транзистор. Когда напряжение шины постоянного тока становится слишком высоким, тормозной транзистор шунтирует ток из шины постоянного тока через тормозной резистор. Эта схема тормозного транзистора имеет ограничения по току, и производитель частотно-регулируемого привода обычно указывает максимальное значение тока и рабочий цикл.
Когда напряжение шины постоянного тока становится слишком высоким, тормозной транзистор шунтирует ток из шины постоянного тока через тормозной резистор. Эта схема тормозного транзистора имеет ограничения по току, и производитель частотно-регулируемого привода обычно указывает максимальное значение тока и рабочий цикл.
Тормозной транзистор регулирует ток через тормозной резистор
Поскольку V = IR, если напряжение постоянно, меньшее сопротивление приведет к большему току.Таким образом, если известно, что максимальное напряжение соответствует уровню перенапряжения KEB 840 В постоянного тока, можно рассчитать минимальное сопротивление, при котором значение тока будет ниже максимального номинального тока тормозного транзистора. Хотя минимальное значение сопротивления не влияет на работу резистора или его способность рассеивать мощность, крайне важно обеспечить его правильную работу с частотно-регулируемым приводом.
Руководства по приводам KEB показывают минимальное тормозное сопротивление, допустимое для каждого привода
Тормозные транзисторы KEB рассчитаны на 100% нагрузку
Рассеиваемая мощность
Второе соображение при выборе тормозного резистора — это его способность рассеивать мощность. Тормозные резисторы KEB указаны с указанием количества мощности, которое они могут безопасно рассеивать при непрерывном использовании (PD), а также трех значений для периодического режима. Каждое из чисел в P6, P25 и P40 относится к совокупному количеству секунд, в течение которых резистор используется в течение двух минут. Например, резистор KEB 10BR100-1683 может безопасно рассеивать до 2200 Вт за один промежуток в шесть секунд в течение двух минут или вместо этого может выполнять два цикла по три секунды каждый в течение двух минут.
Тормозные резисторы KEB указаны с указанием количества мощности, которое они могут безопасно рассеивать при непрерывном использовании (PD), а также трех значений для периодического режима. Каждое из чисел в P6, P25 и P40 относится к совокупному количеству секунд, в течение которых резистор используется в течение двух минут. Например, резистор KEB 10BR100-1683 может безопасно рассеивать до 2200 Вт за один промежуток в шесть секунд в течение двух минут или вместо этого может выполнять два цикла по три секунды каждый в течение двух минут.
Тормозные резисторы KEB имеют разную мощность рассеивания в зависимости от режима работы
Теперь, когда известно, какие значения сопротивления будут безопасно работать с частотно-регулируемым приводом, а также возможности рассеивания мощности различными резисторами, необходимо учитывать, сколько энергии будет генерироваться обратно в привод, которое необходимо будет рассеять. Это обеспечит достаточную мощность выбранного тормозного резистора для безопасного рассеивания энергии, вырабатываемой двигателем. Первый способ сделать это — вычислить. Можно рассчитать мощность, вырабатываемую двигателем, если известны момент инерции двигателя и нагрузки, крутящий момент двигателя, изменение скорости и время замедления. Более подробную информацию о выполнении этих расчетов можно найти в руководстве по тормозному резистору. Однако в реальных приложениях может быть трудно узнать и / или рассчитать моменты инерции масс, особенно нагрузки. Из-за этого обычно необходимо определить надлежащую мощность тормозного резистора с помощью метода тестирования.
Первый способ сделать это — вычислить. Можно рассчитать мощность, вырабатываемую двигателем, если известны момент инерции двигателя и нагрузки, крутящий момент двигателя, изменение скорости и время замедления. Более подробную информацию о выполнении этих расчетов можно найти в руководстве по тормозному резистору. Однако в реальных приложениях может быть трудно узнать и / или рассчитать моменты инерции масс, особенно нагрузки. Из-за этого обычно необходимо определить надлежащую мощность тормозного резистора с помощью метода тестирования.
Общее правило состоит в том, что чем больше нагрузка и чем быстрее замедление, тем больше мощности необходимо рассеять. Однако, используя функцию осциллографа в программном обеспечении Combivis 6, можно записывать напряжение шины постоянного тока привода на протяжении всей операции, чтобы получить более точное представление об использовании тормозного резистора. С помощью осциллографа можно отслеживать, требуется ли резистор с большей рассеиваемой мощностью или вместо этого резистор имеет достаточные размеры. В последнем сценарии можно настроить операцию для повышения производительности, например, ускорить замедление.
В последнем сценарии можно настроить операцию для повышения производительности, например, ускорить замедление.
Тормозной резистор, установленный внутри панели управления KEB
Установка тормозного резистора
Последним соображением при выборе тормозного резистора является его правильная установка. Если тормозной резистор не установлен в соответствии со стандартами UL, цепь может выйти из строя, что приведет к опасности возгорания. Более подробную информацию о безопасном подключении тормозного резистора можно найти здесь.
В дополнение к нашим традиционным резисторам, KEB все чаще продает искробезопасные тормозные резисторы, которые выходят из строя подобно предохранителю, защищающему систему в случае короткого замыкания.
Среда установки также важна. Особого внимания требуют опасные места и установки с легковоспламеняющимися волокнами (ткань, опилки).
Какие виды торможения технически не могут применяться для двигателей постоянного тока?
В электродвигателях используются 3 типа электрического торможения: i. е. Регенеративная, динамическая и заглушка. Из этих трех рекуперативное торможение широко используется в локомотивах, электромобилях. Для экономии энергии во время торможения такое торможение является наиболее эффективным. Двигатели серии DC имеют отличный пусковой момент , высокий пусковой момент . Вот почему он очень полезен для тягового усилия. Но главный недостаток возникает, когда мы пытаемся применить рекуперативное торможение, чтобы снизить его скорость в двигателе постоянного тока.
е. Регенеративная, динамическая и заглушка. Из этих трех рекуперативное торможение широко используется в локомотивах, электромобилях. Для экономии энергии во время торможения такое торможение является наиболее эффективным. Двигатели серии DC имеют отличный пусковой момент , высокий пусковой момент . Вот почему он очень полезен для тягового усилия. Но главный недостаток возникает, когда мы пытаемся применить рекуперативное торможение, чтобы снизить его скорость в двигателе постоянного тока.
Итак, здесь мы собираемся недооценить причину этого ограничения.
Основным предварительным условием для рекуперативного торможения является то, что напряжение двигателя должно быть выше, чем напряжение питания , тогда только ток будет подаваться обратно к источнику.
Теперь для торможения все, что нам нужно сделать, это снизить скорость двигателя. Ответственным фактором, вращающим двигатель, является крутящий момент. Для двигателя крутящий момент прямо пропорционален магнитному потоку и току якоря.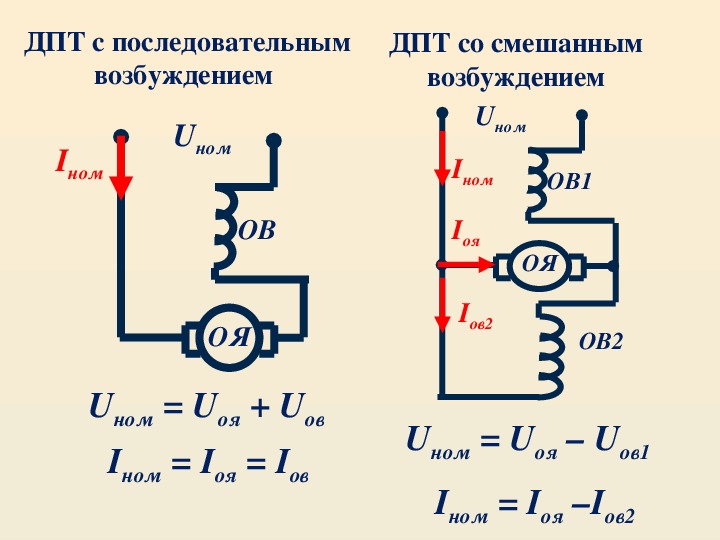
Чтобы уменьшить скорость двигателя, нам нужно создать обратный крутящий момент .Как мы могли это создать? Давайте разберемся. Для двигателя постоянного тока, который мы знаем,
Крутящий момент (Т) = магнитный поток (ɸ) x ток якоря (l a )T = ɸ x I
a …… (1)Чтобы развить обратный крутящий момент, нам нужно обратить вспять ток или магнитный поток. Но при реверсировании обоих крутящий момент останется в том же направлении.
Из приведенного выше рисунка видно, что в электродвигателях с последовательным постоянным током, когда ток якоря проходит через катушку возбуждения, соединенную последовательно с якорем, возникает магнитное поле. ВНИМАНИЕ !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!Таким образом, изменение направления тока якоря на обратное также изменит направление тока возбуждения.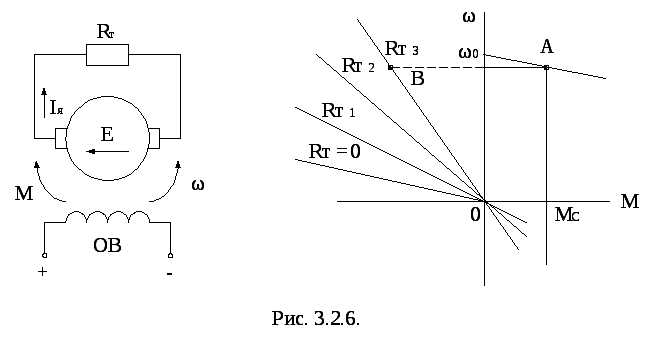
Всегда следует иметь в виду, что общая тенденция тока — течь от более высокого к более низкому потенциалу. Таким образом, рекуперативное торможение возможно только тогда, когда противоэдс (E b ) выше напряжения питания. Когда напряжение питания меньше, ток меняется на противоположное, устанавливается отрицательный крутящий момент и происходит торможение.
Если рассматривать КВЛ ур. двигателя серии постоянного тока получаем,
V s — I a R se — I a R a — E b = 0 Или, I a = (V s — E b ) / (R se + R se )….. (2)Как видно из ур. что, если мы хотим изменить ток якоря I a, обратная ЭДС (E b ) должна быть больше, чем напряжение питания V s .
Создание обратного крутящего момента:
Итак, во время рекуперативного торможения нам необходимо подключить последовательный двигатель либо в параллельном режиме (или в режиме с независимым возбуждением). Как на схеме, изображенной ниже.
Как на схеме, изображенной ниже.
Если рассматривать eqn.no. (2) получаем,
T = ɸ x I
aили, T
= k x (- I a )или, T = -ve …… (3)
Так из ур.нет. (3) мы можем видеть, когда мы фиксируем направление тока возбуждения аналогично в шунте (или отдельно возбужденном соединении), тогда изменение направления тока якоря не изменит направление потока, но изменит значение крутящего момента с положительного на отрицательное & имеет место рекуперативное торможение.
Таким образом, всякий раз, когда двигатель превышает скорость, он все равно увеличивает значение обратной ЭДС (E b ), поскольку обратная ЭДС прямо пропорциональна скорости. Если мы хотим обобщить всю концепцию, , когда обратная ЭДС (E b ) выше, чем напряжение питания, ток автоматически возвращается к источнику, создается обратный крутящий момент и скорость двигателя начинает уменьшаться в процессе рекуперативного торможения.
Посмотрите это видео, чтобы получить более подробное представление:
В чем разница? — Блог AMSOIL
Основное различие между тормозной жидкостью DOT 3 и DOT 4 заключается в их соответствующих температурах кипения.
Я подозреваю, что знаю ваш следующий вопрос.
Но сначала немного предыстории. Министерство транспорта США (DOT) классифицирует тормозную жидкость по четырем основным категориям:
Их основные различия заключаются в температуре кипения в сухом и влажном состоянии, а также в составе.
| Точка кипения в сухом состоянии | Точка кипения во влажном состоянии | Состав | |
| DOT 3 | 205 ° C / 401 ° F | 140 ° C | 32 902 Гликолевый эфир|
| DOT 4 | 230 ° C / 446 ° F | 155 ° C / 311 ° F | Гликолевый эфир / боратный эфир |
| DOT 5 | 260 ° C / 500 ° F | 180 ° C / 356 ° F | Силикон |
DOT 5.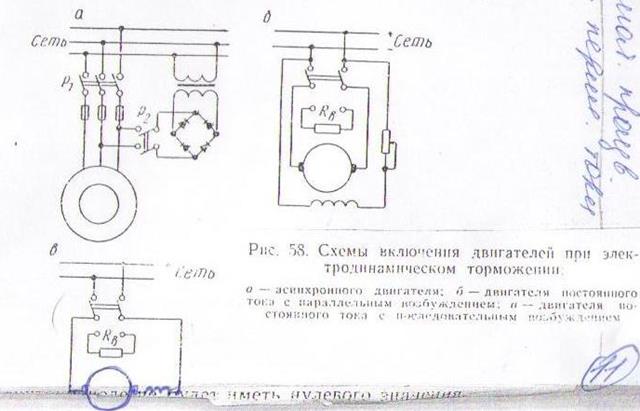 1 1 | 260 ° C / 500 ° F | 180 ° C / 356 ° F | Гликолевый эфир / боратный эфир |
DOT 3 является наиболее распространенным типом, используемым сегодня в легковых и грузовых автомобилях. DOT 4, однако, набирает популярность благодаря широкому использованию антиблокировочных тормозных систем и антипробуксовочной системы, которые выигрывают от более низкой вязкости жидкости DOT 4.
Совместимы ли тормозные жидкости DOT 3 и DOT 4?
Да, тормозная жидкость DOT 3 совместима с тормозной жидкостью DOT 4. Однако DOT 4 имеет более высокую температуру кипения.
DOT 5.1 используется в высокопроизводительных и тяжелых условиях из-за своей высокой температуры кипения. Он совместим с жидкостями DOT 3 и DOT 4.
Тормозная жидкость DOT 5 изготовлена из силикона, то есть не впитывает воду. Он несовместим с другими тормозными жидкостями и используется в основном в классических автомобилях, которые хранятся в течение длительного времени и нуждаются в тормозной жидкости, не впитывающей воду.
Довести до кипения
Итак, теперь мы вернулись к точке кипения.Что это значит? В конце концов, мы это не готовим.
Что ж, при правильных условиях эксплуатации и окружающей среды вы готовите .
Резкое торможение может привести к сильной жаре.При торможении возникает сильный нагрев между тормозными колодками и роторами. Возможно, вы видели гонку по телевизору, где продюсеры вставляют GoPro под машину, чтобы показать, как тормоза буквально светятся красным, когда водитель нажимает на педаль.
Сильный нагрев может привести к испарению тормозной жидкости, в результате чего она станет сжимаемой, что приводит к ощущению губчатости при нажатии на тормоза.
Это оставляет газ в магистралях, который сжимается, что приводит к мягкому нажатию педали. В кругах гонщиков и гонщиков это известно как затухание тормозов , и водители стараются избегать этого. Чтобы вести машину максимально эффективно и безопасно, водитель должен быть уверен, что тормоза будут работать на 10-м круге так же, как на первом.
Затухание тормоза также может происходить из-за сопряжения тормозных колодок / ротора. Колодки выпускают газы, что уменьшает контакт между колодками и роторами.Вот почему в роторах высокого класса есть пазы и просверленные отверстия — для более быстрого выпуска газов и ограничения замирания.
Затухание тормозов не только для гонщиков
Спуск с крутого холма, особенно при буксировке тяжелого груза или буксировке прицепа, может привести к сильному нагреву, если вы едете или нажимаете на тормоза.
СОВЕТ ПРОФЕССИОНАЛА: В следующий раз переключитесь на более низкую передачу перед спуском по крутому склону.
К тому времени, когда вы достигнете дна, ваша педаль может упасть почти до пола, в результате чего ваш пульс будет почти зашкаливать.
Если вам нравится кататься на своем автомобиле по извилистой проселочной дороге для небольшой терапии, то при торможении на поворотах может быть достаточно тепла, что приведет к потере тормоза. Если вы станете слишком усердным, вы можете свернуть за угол прямо в лес.
Точка кипения жидкости указывает температуру, при которой тормозная жидкость испаряется. Чем выше классификация DOT, тем выше температура кипения и, таким образом, жидкость лучше сопротивляется нагреванию.Вот почему гонщики используют тормозную жидкость DOT 4, а не DOT 3.
Точка кипения разделена на точки сухого и влажного кипения
Температура кипения в сухом состоянии определяется с использованием свежей жидкости прямо из нового контейнера. Температура влажного кипения жидкости определяется с использованием жидкости, загрязненной 3,7% воды, поэтому она всегда ниже точки кипения в сухом состоянии.
Почему администраторы тестирования могут загрязнять хорошую жидкость? Потому что это отражение того, что происходит в реальном мире.
Тормозная жидкость гигроскопична. означает, что она впитывает воду (кроме тормозной жидкости DOT 5 на основе силикона). Жидкость DOT 3, например, может ежегодно поглощать до двух процентов воды . Влага может попасть в систему при снятии крышки резервуара для добавления жидкости через изношенные уплотнения и даже через сами резиновые тормозные магистрали. Таким образом, влажная точка кипения жидкости — это число, которое более точно отражает то, что на самом деле происходит в вашем автомобиле.
Поскольку тормозная жидкость может изнашиваться, очень важно периодически ее менять.В противном случае тормоза не только станут губчатыми и небезопасными, но и влага будет медленно разъедать металлические детали.
Хорошее практическое правило — менять тормозную жидкость в легковых автомобилях раз в два года, а в гоночных автомобилях — не реже одного раза в год. По данным AAA, 88 процентов автомобилистов не обращают внимания на обслуживание тормозов, поэтому вы не одиноки, если не меняли тормозную жидкость какое-то время, например, с момента покупки автомобиля.
Смотрите сейчас: как прокачать тормоза
Но еще не поздно начать.А когда вы это сделаете, ознакомьтесь с нашей линейкой тормозных жидкостей для вашего автомобиля.
Обновлено. Первоначально опубликовано 27 февраля 2018 г.
Рекуперативное торможение | Электрические концепции
В последнем посте «Потребность в электрическом торможении в электроприводах» мы обсудили различные причины, по которым требуется электрическое торможение. Тормоза используются для уменьшения или прекращения скорости двигателей. Торможение двигателя можно разделить на три типа:
В этом посте мы сосредоточимся на рекуперативном торможении и аспектах его применения.Эта тормозная система используется на большинстве электрических и газо-электрических гибридных автомобилей.
В этой тормозной системе цель состоит в том, чтобы вернуть энергию, которая возникает при нажатии на тормоза. В электрических или гибридных автомобилях электродвигатель, приводящий в движение колеса автомобиля, играет важную роль при торможении. Когда педаль тормоза нажата, схема рекуперативного торможения включает двигатель, так что теперь он работает в обратном направлении, чтобы противодействовать направлению вращения колес.Это реверсирование фактически заставляет его работать как генератор энергии, вырабатывающий электрическую энергию. Вырабатываемая электроэнергия направляется к аккумуляторным батареям автомобиля для их подзарядки.
На более высоких скоростях рекуперативным тормозам по-прежнему требуется помощь традиционных тормозных систем, которые можно использовать в качестве резервных. Эффективность рекуперативных тормозных систем, используемых сегодня, значительно повысилась. Некоторые существующие системы способны улавливать и хранить до 70 процентов энергии, которая в противном случае была бы потеряна.
Что такое рекуперативное торможение?Чтобы понять принцип рекуперативного торможения, рассмотрите рисунок ниже.
Для рекуперативного торможения обратная ЭДС двигателя постоянного тока должна быть больше, чем напряжение питания, т.е.
E> V, и направление тока якоря Ia должно быть отрицательным, что означает, что теперь двигатель работает как генератор.
Как известно, обратная ЭДС E = KaØω м
Но поскольку магнитный поток поля не может быть увеличен сверх номинального значения, так как сердечник будет насыщаться, поэтому для фиксированного напряжения питания рекуперативное торможение возможно только на скорости выше номинальной, но если у нас есть переменное напряжение питания, то рекуперативное торможение на также может быть достигнута скорость ниже номинальной.
Имейте в виду, что рекуперативное торможение невозможно для двигателей постоянного тока. Почему?В случае двигателя серии постоянного тока, по мере увеличения скорости двигателя, ток якоря и, следовательно, магнитный поток поля будут уменьшаться, и поэтому обратная ЭДС E никогда не может быть больше, чем напряжение питания V. Следовательно, рекуперативное торможение невозможно в серии постоянного тока. Мотор.
Всегда следует убедиться, что нагрузка доступна для потребления регенерированной энергии. Если нет нагрузки, потребляющей регенерированную мощность, напряжение в линии будет увеличиваться из-за емкости линии, которая определенно повредит изоляцию.Следовательно, рекуперативное торможение следует использовать только тогда, когда имеется достаточно нагрузок для поглощения регенерированной мощности.
В случае, если источником питания является аккумулятор, регенерированная энергия может использоваться для зарядки аккумулятора, как показано на примере автомобиля.
В следующем посте мы обсудим оставшиеся два метода электрического торможения. Так что будь там …
Спасибо!
Обзор технологии электромобилей| Министерство энергетики
Часть 1: Обзор транспортного средства
Технология электромобилей быстро развивалась с момента своего появления, и сегодня на рынке доступно множество вариантов электромобилей с подключаемым модулем и аккумуляторных электромобилей.Но как именно работают электромобили и в чем их преимущества?
Начнем с рассмотрения устаревшей автомобильной технологии: двигателя внутреннего сгорания или ДВС. Этот автомобиль приводится в движение двигателем внутреннего сгорания, который работает только на бензине. Это обычная, хорошо зарекомендовавшая себя и надежная технология, но она потребляет большое количество бензина, что может быть дорогостоящим во многих отношениях.
Введите трансмиссию электромобиля! В отличие от технологии внутреннего сгорания, которая использует сгорание и давление для приведения в движение транспортного средства, электромобили или электромобили двигаются за счет электромагнетизма.Эти автомобили используют электричество, обычно хранящееся в батарее, для питания электродвигателя. Технология электромобилей используется в гибридных электромобилях или HEV; подключаемые к сети гибридные электромобили или PHEV; и аккумуляторные электромобили, или BEV.
Гибридный электромобиль стал первой технологией электромобилей, появившейся на рынке современных транспортных средств. HEV, такие как Toyota Prius и Lexus CT-200-H, популярны из-за их повышенной топливной экономичности. Эти автомобили сочетают в себе двигатель внутреннего сгорания и электродвигатель с небольшой батареей для хранения электроэнергии.Хотя HEV работает только на бензине, аккумулятор транспортного средства также используется для питания электродвигателя. Электроэнергия, хранящаяся в батарее, в основном происходит от рекуперации энергии посредством рекуперативного торможения. Такое использование возвращенной энергии — одна из причин, по которой HEV более экономичен, чем типичный автомобиль с ДВС.
Как и оригинальный гибрид, подключаемый к сети гибридный электромобиль приводится в движение двигателем внутреннего сгорания и электродвигателем. Тем не менее, PHEV имеет гораздо больший аккумулятор, который можно заряжать с помощью оборудования для электропитания или EVSE.Это позволяет транспортному средству работать в полностью электрическом режиме — в котором транспортное средство приводится в движение только электродвигателем — до тех пор, пока батарея не разрядится. В этот момент автомобиль работает в гибридном режиме до тех пор, пока в бензобаке не закончится топливо. Увеличение емкости аккумулятора и работа автомобиля на электричестве снижает выбросы в выхлопные трубы и повышает топливную и энергоэффективность автомобиля.
Последний тип технологии электромобилей — электромобиль с аккумулятором. Этот автомобиль не имеет двигателя внутреннего сгорания и питается только от аккумулятора и электродвигателя.BEV не используют бензин и заряжаются только EVSE. BEV имеет самую большую батарею среди всех типов транспортных средств. Он также является наиболее энергоэффективным и производит нулевые выбросы из выхлопной трубы.
Часть 2: диапазоны транспортных средств
Поскольку для каждого типа транспортных средств используются разные технологии, диапазон, на который они могут перемещаться, также различается. Автомобили с ДВС, работающие только на бензине, обычно могут проехать от 350 до 450 миль с полным баком бензина.
Гибридные электромобили более эффективно расходуют бензин и обычно могут проехать от 550 до 700 миль.Хотя у них есть батарея и электродвигатель, эта батарея питается только во время типичного ездового цикла и не является основным источником движения. Однако из-за рекуперативного торможения эта небольшая батарея является основной причиной повышенной топливной экономичности и дальности хода гибрида.
Большая батарея в подключаемом к сети гибридном электромобиле позволяет транспортному средству работать в полностью электрическом режиме, обычно проезжая от 20 до 40 миль только на электричестве. PHEV предназначены для ежедневных поездок на работу и легкой подзарядки в ночное время с использованием стандартной розетки.После того, как большая часть энергии в аккумуляторной батарее разряжена, транспортное средство может работать в гибридном режиме на большие расстояния, используя бензин и используя небольшую часть аккумулятора для поддержки электрической трансмиссии, для полного пробега транспортного средства от 450 до 550 миль.
Наконец, аккумуляторный электромобиль имеет самую простую и эффективную трансмиссию с типичным запасом хода аккумулятора от 150 до 300 миль. BEV можно заряжать в течение ночи, используя стандартный жилой уровень 2 EVSE.
Часть 3: Режимы рекуперативного торможения электромобиля
Наиболее заметное различие между движением электромобиля и обычного транспортного средства с ДВС — это рекуперативное торможение.Рекуперативное торможение означает, что электродвигатель работает в обратном направлении, тем самым прилагая тормозное усилие за счет электромагнетизма. Это возвращает часть кинетической энергии транспортного средства за счет зарядки аккумулятора. Некоторые модели электромобилей имеют определенные режимы движения, которые включают различные уровни рекуперативного торможения.
В нормальных условиях движения электромобиль, такой как Tesla Model S, задействует рекуперативное торможение, чтобы замедлить автомобиль, когда водитель убирает ногу с педали газа.Настройка «Стандарт» обеспечивает максимальную мощность рекуперативного торможения — она восстанавливает большую часть энергии и снижает износ тормозов. В качестве альтернативы, настройка «Низкая» включает уменьшенную силу рекуперативного торможения, которая возвращает меньше энергии, но позволяет транспортному средству двигаться дальше по инерции, чем в «Стандартном» режиме.
Электромобиль, такой как Tesla Model S, также имеет особые настройки для работы тормозных систем, когда транспортное средство остановлено или движется на очень низких скоростях. Режим «Creep» предназначен для имитации скорости холостого хода автомобиля с ДВС.Он отключает рекуперативное торможение и создает небольшой крутящий момент двигателя при остановке или на низких скоростях, когда ступня водителя находится вне педали акселератора. Эта функция чаще всего используется на парковке при поиске места для парковки.
В качестве альтернативы настройка «Roll» также отключает рекуперативное торможение на низких скоростях, но не увеличивает крутящий момент двигателя. Это позволяет автомобилю свободно катиться, как на нейтрали.
Наконец, настройка «Удержание» продолжает включать рекуперативное торможение до полной остановки автомобиля, что помогает снизить износ тормозов и производит наибольшее количество возвращаемой энергии.Эта функция также автоматически включает фрикционные тормоза, когда автомобиль полностью остановлен, удерживая автомобиль на месте до тех пор, пока ступня водителя не будет поставлена на тормоз или акселератор.
Во всех этих режимах торможения педаль тормоза всегда доступна и работает так же, как на обычном автомобиле в условиях экстренного торможения.
Режимы рекуперативного торможения различаются в зависимости от марки и модели автомобиля. Например, Nissan Leaf обеспечивает три уровня режимов рекуперативного торможения, а система Chevrolet Bolt включает в себя нажатие лопастей рядом с рулевым колесом, чтобы максимизировать рекуперативное торможение и полностью остановить автомобиль.
Часть 4: Режимы трансмиссии PHEV
С двумя полностью отдельными трансмиссиями — электрической и внутренней — PHEV могут включать рекуперативное торможение, а также работать во многих различных режимах движения. Например, Ford Fusion имеет три режима вождения — «Авто EV», «EV сейчас» и «EV позже» — каждый с конкретным использованием.
Режим «Auto EV» включает оптимизированное сочетание энергии аккумулятора и бензина для обеспечивают наиболее эффективное использование обоих источников топлива.Этот режим идеально подходит для движения на более высоких скоростях шоссе.
Режим «EV Now» полностью полагается на аккумулятор и электрическую трансмиссию, что приводит к нулевым выбросам выхлопных газов, как у электромобиля с аккумулятором.
Наконец, режим «EV Later» сохраняет емкость аккумулятора, чтобы использовать его позже в поездке. Этот режим идеально подходит для поездок, сочетающих движение на скоростях по шоссе и по городу. Он использует двигатель внутреннего сгорания на скоростях шоссе и резервирует энергию для режима «EV Now» на более позднем этапе поездки, когда электрическая трансмиссия наиболее эффективна.
Часть 5: Типы EVSE
Все подключаемые к электросети электромобили, включая подключаемые гибриды и аккумуляторные электромобили, используют для зарядки своих аккумуляторов оборудование питания электромобилей или EVSE.
Существует три распространенных типа EVSE. Первый называется зарядным устройством уровня 1. Как правило, эти устройства представляют собой портативные кабели, которые работают от стандартной бытовой розетки на 120 вольт и обеспечивают диапазон от 2 до 5 миль в час зарядки. Это наиболее доступный тип зарядного устройства, но он ограничен в дневном диапазоне, который может подавать на автомобиль.Таким образом, это приложение наиболее распространено для PHEV с батареями меньшего размера или для водителей BEV, которым ежедневно не хватает времени на работу.
Зарядные устройства уровня 2 обеспечивают больше энергии в час и работают от 208 или 240 вольт. Эти зарядные устройства более дорогие и, как правило, устанавливаются в виде стационарных постаментов или настенных устройств. Они обеспечивают автомобиль с запасом хода от 10 до 20 миль в час зарядки. Это наиболее распространенное приложение для электромобилей большой дальности, а также на рабочих местах и на общественных зарядных станциях.
И, наконец, быстрое зарядное устройство постоянного тока является самым дорогим типом зарядного устройства, но оно обеспечивает автомобиль большей энергией в час. Стандартное быстрое зарядное устройство постоянного тока может обеспечить расстояние от 60 до 80 миль примерно за 20 минут. Эти зарядные устройства чаще всего используются на автомагистралях, и их рекомендуют только для поддержки случайных поездок на дальние расстояния, потому что частая зарядка аккумулятора на таком высоком уровне мощности может привести к ухудшению характеристик аккумулятора.
Часть 6: Отчетность о потреблении энергии
Для транспортных средств федерального парка отчетность о потреблении энергии является обязательным требованием ведения бизнеса.В автомобилях с ДВС расход топлива обычно сообщается через поставщика топливных карт, который записывает каждую транзакцию заправки.
Однако электромобили можно заряжать на месте или за его пределами от розеток, простых блоков EVSE и сетевых блоков. Хотя многие из этих зарядных устройств могут записывать и хранить транзакции, некоторые из самых доступных EVSE — нет. Поэтому рекомендуемый метод измерения энергопотребления, выражаемого в киловатт-часах, — телематика. Телематические платформы
обычно фиксируют киловатт-часы и отображают их на онлайн-панели.Менеджер автопарка может выбрать настраиваемый диапазон дат, чтобы узнать потребление энергии автомобилем в киловатт-часах за определенный период времени. Этот диапазон дат может применяться ко всем электромобилям в парке, обеспечивая информацию, необходимую для ежегодной отчетности по федеральному парку.
Сетевые блоки или блоки smart-EVSE — еще один хороший источник информации о потреблении энергии. Эти устройства часто имеют интерактивные информационные панели, аналогичные телематике, которые фиксируют потребление энергии транспортным средством. Эти информационные панели также часто доступны через приложения для смартфонов.Однако, если автомобиль время от времени заряжается в другой сети, данные от основного блока EVSE могут быть неполными. В этом случае водители должны попытаться собрать информацию с внешних зарядных станций, чтобы дополнить данные от их основного блока EVSE.
Сами транспортные средства также часто отображают потребление энергии или эффективность транспортного средства на своей физической приборной панели. Некоторые модели автомобилей показывают энергопотребление в течение всего срока службы, поэтому руководителям федерального автопарка необходимо будет проверять ежегодно потребляемые киловатт-часы, чтобы составлять отчеты FAST.Однако, если срок службы транспортного средства отображается в милях на киловатт-час, менеджерам автопарка потребуется разделить годовые мили транспортного средства на его эффективность, чтобы определить годовое потребление энергии.
(Годовые мили) / (миль / кВтч) = годовые кВтч
Если ничего не помогает, Федеральная программа управления энергопотреблением Министерства энергетики США предлагает простой способ оценки энергопотребления автомобиля: возьмите показание годового пробега автомобиля и умножьте его. экономией топлива автомобиля, указанной в киловатт-часах на милю на сайте Fueleconomy.губ.
Годовые мили x кВтч / миля = годовые кВтч
Часть 7: Заключение
Теперь, когда вы знаете все о типах электромобилей, запасах хода, рекуперативном торможении, трансмиссии и зарядке, вы готовы управлять своим новым электромобилем!
Что такое рекуперативное торможение — серия постоянного тока и параллельный двигатель
В модели Regenerative Braking мощность или энергия приводимого в действие механизма, имеющая кинетическую форму, возвращается обратно в сеть электропитания. Этот тип торможения возможен, когда ведомая нагрузка или механизмы вынуждают двигатель работать со скоростью, превышающей скорость холостого хода при постоянном возбуждении.
Состав:
В этом случае обратная ЭДС E b двигателя больше, чем напряжение питания V, которое меняет направление тока якоря двигателя. Теперь машина начинает работать как генератор, и вырабатываемая энергия подается к источнику.
Рекуперативное торможение также может выполняться на очень низких скоростях, если двигатель подключен как генератор с независимым возбуждением. Возбуждение двигателя увеличивается по мере уменьшения скорости, так что выполняются два приведенных ниже уравнения.
Двигатель не переходит в режим насыщения при увеличении возбуждения.
Рекуперативное торможение возможно для двигателей с независимым возбуждением и с независимым возбуждением. В составных двигателях торможение возможно только при компаундировании слабой серии.
Применение рекуперативного торможения
- Рекуперативное торможение используется особенно там, где требуется частое торможение и замедление приводов.
- Это наиболее полезно для удержания нисходящего груза с высокой потенциальной энергией с постоянной скоростью.
- Регенеративное торможение используется для управления скоростью двигателей, приводящих в движение нагрузки, например, в электровозах, лифтах, кранах и подъемниках.
- Рекуперативное торможение не может использоваться для остановки двигателя. Он используется для управления скоростью выше скорости холостого хода двигателя.
Необходимым условием для регенерации является то, что обратная ЭДС E b должна быть больше, чем напряжение питания, чтобы ток якоря был реверсирован, и режим работы изменился с двигателя на генератор.
Рекуперативное торможение в параллельных двигателях постоянного тока
При нормальных условиях эксплуатации ток якоря определяется по приведенному ниже уравнению:
Когда груз опускается с помощью крана, подъемника или подъемника, скорость двигателя становится больше скорости холостого хода, обратная ЭДС становится больше, чем напряжение питания. Следовательно, ток якоря Ia становится отрицательным. Теперь машины начинают работать как генератор.
Рекуперативное торможение в двигателях постоянного тока
В случае двигателей серии постоянного тока увеличение скорости сопровождается уменьшением тока якоря и магнитного потока.Обратная ЭДС Eb не может быть больше напряжения питания. В двигателях постоянного тока возможна регенерация, поскольку ток возбуждения не может быть больше тока якоря.
Регенерация требуется там, где двигатель серии постоянного тока широко используется, например, в тяговых, лифтовых подъемниках и т. Д. Например — в электровозе, движущемся по уклону, может потребоваться постоянная скорость. В приводах подъемника скорость должна быть ограничена всякий раз, когда она становится опасно высокой.
Один из часто используемых методов рекуперативного торможения двигателя постоянного тока — подключение его как параллельного двигателя.Поскольку сопротивление обмотки возбуждения низкое, в цепь возбуждения включается последовательное сопротивление, чтобы ограничить ток в пределах безопасного значения.
Tesla отказывается от возможности рекуперативного торможения для новых электромобилей
Если вы любите рекуперативное торможение, это для вас ничего не значит.
Ник Миотке / RoadshowЕсли вы хотите немного больше контролировать рекуперативное торможение в вашей новой Tesla, есть плохие новости. Согласно сообщениям новых владельцев в различных сообществах, таких как Reddit, Tesla больше не включает возможность переключения между настройками рекуперативного торможения.
Это, конечно, не самая большая потеря, но для тех, кто не привык к системе регенерации, возможность переключения может помочь им облегчить это.Регенеративные тормоза превращают обычно потерянную кинетическую энергию в свежие электроны, которые возвращаются в аккумуляторную батарею, что может помочь немного увеличить запас хода электромобиля. Предыдущие автомобили Tesla позволяли владельцам выбирать между «Стандартным» или «Низким» режимами, причем последний вариант был менее агрессивным.
Подъем на место водителя
Подпишитесь на информационный бюллетень Roadshow, чтобы получать последние новости и обзоры автомобилей, которые будут отправляться вам на почту два раза в неделю.
Теперь владельцы сообщают, что вариант Standard — единственный вариант, который можно выбрать, по-видимому, для автомобилей, выпущенных после июня этого года.У Tesla нет отдела по связям с общественностью, который направляет запросы на комментарии, поэтому мы не знаем, почему именно Tesla удалила эту опцию. Возможно, Tesla знает, что рекуперативное торможение может увеличить дальность полета, поэтому она просто идет вперед с настройкой по умолчанию.
Если вы не привыкли к системе регенерации, это несложно понять. Подумайте о рекуперативных тормозах, как о переключении на пониженную передачу в механической коробке передач, когда срабатывает моторный тормоз. Это также ощущение, которое позволяет многим автопроизводителям рекламировать «вождение с одной педалью», поскольку некоторые электромобили почти полностью останавливают машину, не используя тормозной механизм. физические тормоза.Но, если вы действительно хотите меньше регенерации, похоже, вам не повезло, по крайней мере, до тех пор, пока Тесла не решит предоставить объяснение или обновленные настройки.
Сейчас играет: Смотри: Tesla Model 3 против Nissan Leaf: битва электромобилей
7:28
.