Шаговый или бесколлекторный двигатель – какой лучше выбрать
Шаговый и бесколлекторный двигатели во многом похожи друг на друга. Рассмотрим их основные особенности, различия и попробуем определить, какой двигатель лучше.
В предыдущем материале – «Двигатели бывают разные», мы предельно кратко рассмотрели основные виды существующих низковольтных синхронных двигателей постоянного тока и сказали несколько слов о принципах их работы. При этом, мы намерено не углублялись в детальное рассмотрение особенностей устройства и принципов работы этих двигателей и, тем более, в сравнение различных типов двигателей с точки зрения их рабочих характеристик и особенностей эксплуатации. Это большая, отдельная и неоднозначная тема для разговора и часть этого вопроса мы попробуем рассмотреть далее.
Вопрос выбора того или иного типа двигателя для решения своей задачи становится причиной непроходящей головной боли для любого разработчика, столкнувшегося с приводными системами.
Не претендуя ни на полноту, ни на всесторонность сравнения, мы сейчас попробуем разобраться в главном вопросе, терзающем разработчиков устройств разнообразных типов и назначений – так что же лучше – шаговый или бесколлекторный двигатель?
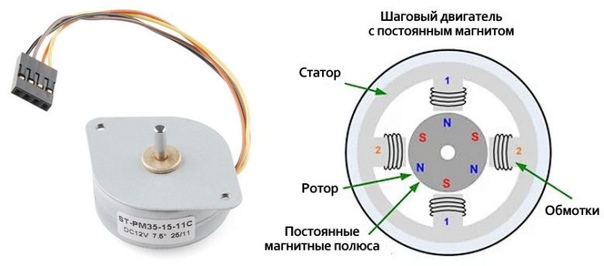
Как мы уже говорили ранее, шаговый и бесколлекторный двигатели во многом похожи друг на друга. Обе конструкции имеют статор, сформированный электрическими обмотками, генерирующими магнитное поле, и ротор, состоящий из постоянных магнитов, катушек с переменным магнитным сопротивлением или смеси первого и второго.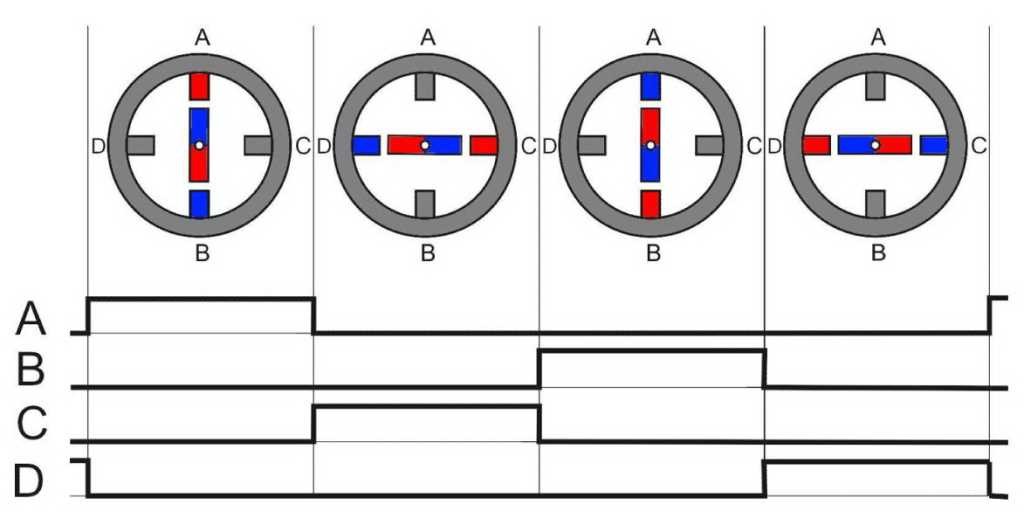
Итак, давайте разбираться:
Шаговые двигатели
Начнем с того, какие бывают шаговые двигатели. Уже упоминалось, что по принципу организации ротора шаговые двигатели подразделяются на двигатели с ротором на постоянных магнитах (самый похожий на бесколлекторный двигатель тип), двигатели с ротором на катушках с переменным магнитным сопротивлением и гибридные двигатели – т.е. с ротором, объединяющим первый и второй тип.
Гибридные шаговые двигатели являются наиболее используемым типом этого вида приводов – считается, что гибридная конструкция ротора позволяет объединить наилучшие черты, как двигателей м переменным магнитным сопротивлением, так и двигателей с постоянными магнитами.
Принцип работы шагового двигателя
Принцип работы шагового двигателя предельно прост. Ротор шагового двигателя конструктивно устроен таким образом, что в нем присутствуют ярко выраженные зубцы магнитного поля. В сочетании с конструкцией статора, состоящего из отдельных пар электромагнитных катушек, как правило намотанных на профилированные сердечники, это, при переключении питания между парами обмоток, обеспечивает четкое перемещение ротора на строго определенный угловой шаг в направление переключения обмоток статора. Одно переключение – один четкий угловой шаг. Все просто.
Таким образом для управления шаговым двигателем нам, в норме, требуются только две командные цепи – «шаг» — цепь по которой передается последовательность импульсов включения обмоток и «направление» — определяющая в каком направлении (по часовой стрелке или против) переключаются пары обмоток и, соответственно, вращается ротор.
Количество шагов на оборот ротора зависит от конструкции двигателя. По сути, чем больше полюсов обмотки статора и магнитных зубцов ротора, тем больше шагов может сделать двигатель за полный оборот и, соответственно, тем меньше шаг. Однако, на практике, существуют фундаментальные ограничения, не позволяющие уменьшать шаг до бесконечности. На данный момент на рынке присутствуют, преимущественно, шаговые двигатели с единичным шагом в пределах от 1.8° до 7.5° — именно в этом диапазоне удается получать наиболее стабильные по качеству и повторяемости технических характеристик изделия.
Преимущества шаговых двигателей
Уже из этого небольшого обзора становятся понятны некоторые преимущества шаговых двигателей – в первую очередь это предсказуемость поведения и простота управления. Да, для шагового двигателя требуется модуль управления, традиционно называемый –драйвер, однако для управления самим драйвером достаточно всего двух командных сигналов – «шаг» и «направление».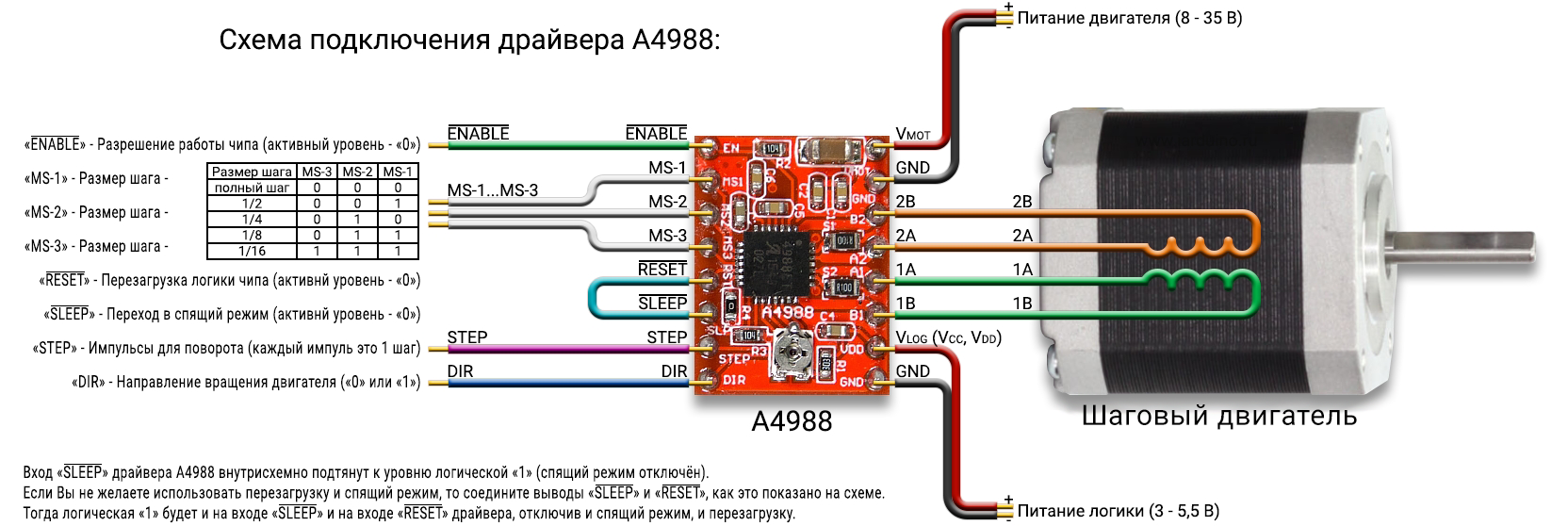
Более того, в общем случае, шаговые двигатели существенно дешевле других типов приводов.
Казалось бы, этот набор преимуществ определяет доминирование шаговых двигателей во всех отраслях промышленности. Тем не менее это не так. Более того, бесколлекторные и моментные двигатели успешно вытесняют шаговые двигатели даже в тех областях производства, где, традиционно, стоимость является одной из ключевых характеристик. Почему?
Недостатки шаговых двигателей
Начнем с того, что в бочке меда простоты и дешевизны шагового двигателя есть существенная ложка дегтя. И связана она, как ни странно, также с ключевой конструктивной особенностью шагового двигателя.
Несложно догадаться, что ярко выраженный зубцовый эффект шагового двигателя – основа его функционирования, приводит к абсолютной невозможности обеспечить плавное вращение ротора шагового двигателя и, соответственно, его нагрузки.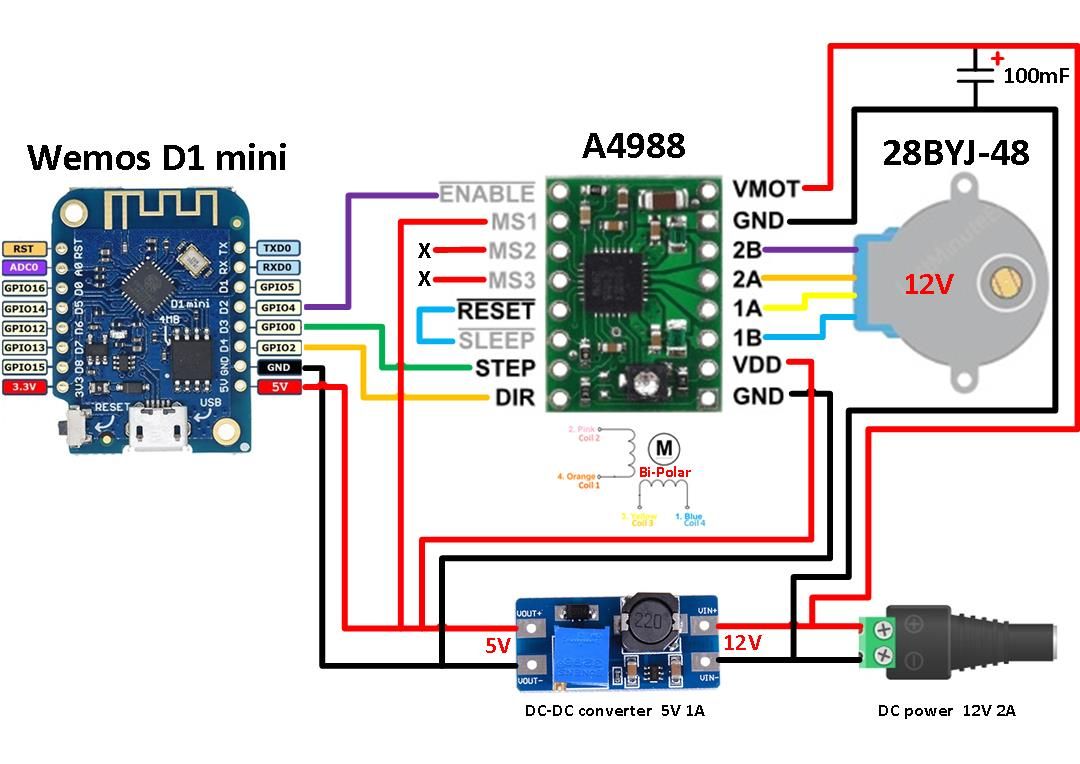
Да, существует режимы микрошагов и разнообразные ухищрения, позволяющие сгладить ход ротора шагового двигателя. Однако, во-первых, исправить ситуацию полностью невозможно (из-за самих конструктивных особенностей), а во-вторых, подобные ухищрения требуют применения уже гораздо более сложной и дорогой электроники управления…
Кроме того, принцип работы шагового двигателя приводит к ряду не вполне очевидных, но, в некоторых случаях, крайне существенных эффектов.
Первое и самое явное ограничение – шаговый двигатель сложно заставить повернуться на угол, меньше единичного шага. Существуют драйверы и конструкции двигателей, позволяющие, при необходимости, выполнять поворот на пол шага, однако ротор, замороженный в таком состоянии нестабилен и испытывает непрерывную флуктуацию вокруг своего положения.
Из-за, описанных выше, особенностей работы шаговый двигатель производит ощутимую вибрацию, что в ряде случаев может приводить к попаданию в резонансные частоты монтажной конструкции. Также вибрация может передаваться на элементы нагрузки, что пагубно сказывается на точности и конструктивной жесткости, особенно в случае приводов линейного перемещения. Эта особенность существенно ограничивает, например, предельные размеры рабочей зоны промышленного оборудования (обрабатывающих комплексов и других станков, требующих позиционирования).
Более того, из-за специфики переключений и зубцового эффекта, шаговый двигатель генерирует при работе значительные электромагнитные помехи, что делает его применение в ряде областей, крайне нежелательным. Простой пример – шаговый двигатель в регулируемой опоре медицинской кровати… Пищат, приборы, бегут врачи, аврал и паника… А ничего страшного – просто пациент устал лежать и решил приподнять спинку кровати. Двигатель в опоре создал помеху на монитор кардиоритма… Ну и понеслось…
Двигатель в опоре создал помеху на монитор кардиоритма… Ну и понеслось…
Думаете – утрирую? Ну, возможно… немного.
Есть у шаговых двигателей и другие недостатки, связанные с техническими характеристиками. В общем случае, соотношение габарит/производительность или вес/производительность, при сравнении разных типов двигателей, оказываются не в пользу шаговых.
Итак, шаговые двигатели не идеальны. А для ряда отраслей и вовсе не желательны. Есть ли альтернатива?
Бесколлекторные двигатели
Как несложно догадаться из преамбулы этой статьи, наиболее употребимой альтернативой шаговым двигателям являются различные модификации бесколлекторных двигателей на постоянных магнитах.
В чем же разница между принципами работы и конструкцией шагового двигателя, и конструкцией и принципом работы бесколлекторного двигателя?
Принцип работы бесколлекторного двигателя
На первый взгляд, и мы это уже упоминали, все очень похоже.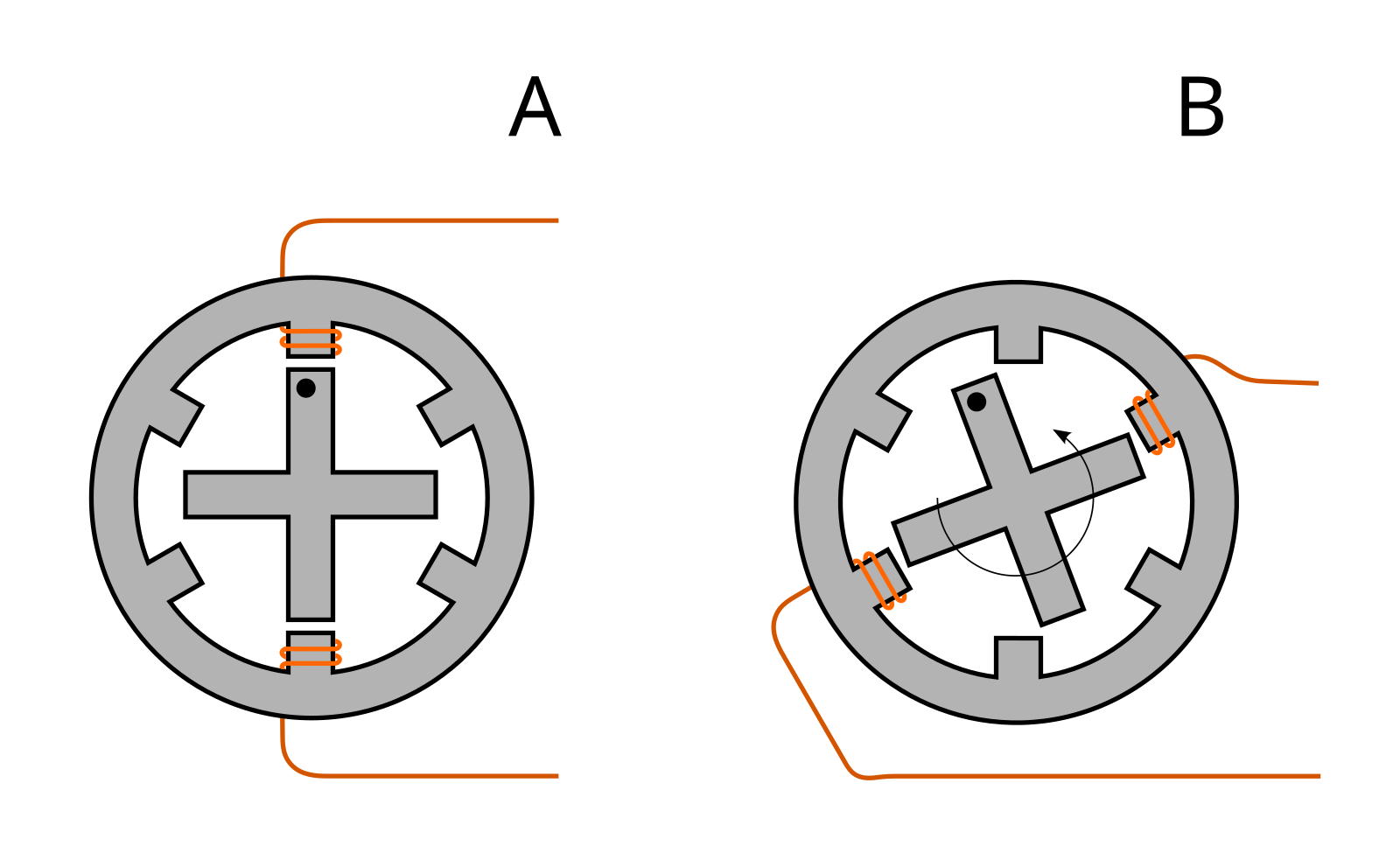 Бесколлекторный двигатель состоит из статора, сформированного электромагнитной обмоткой сложной конструкции – полой (наиболее прогрессивное решение) или намотанной на сердечник (сердечники) и ротора, собранного из блока мощных постоянных магнитов. Для управления приводом так же требуется электронное устройство, в случае бесколлекторного двигателя, обычно называемое – контроллер. Контроллер переключает фазы обмотки статора, формируя непрерывную гладкую волну электромагнитного поля, магнитные полюса ротора следуют за фронтом волны в сторону ее движения. Все просто, но, как говориться – есть нюанс.
Бесколлекторный двигатель состоит из статора, сформированного электромагнитной обмоткой сложной конструкции – полой (наиболее прогрессивное решение) или намотанной на сердечник (сердечники) и ротора, собранного из блока мощных постоянных магнитов. Для управления приводом так же требуется электронное устройство, в случае бесколлекторного двигателя, обычно называемое – контроллер. Контроллер переключает фазы обмотки статора, формируя непрерывную гладкую волну электромагнитного поля, магнитные полюса ротора следуют за фронтом волны в сторону ее движения. Все просто, но, как говориться – есть нюанс.
В бесколлекторном двигателе, особенно с полой обмоткой, отсутствует конструктивный зубцовый эффект. Более того, зубцовый эффект для бесколлекторного двигателя, считается паразитным явлением и всячески, конструктивно, минимизируется. Но в этом случае возникает вопрос – каким образом контроллер должен переключать фазы обмотки так, чтобы момент переключения происходил в оптимальный момент, при переходе полюсов магнитов ротора из области действия одной фазы обмотки в другую? Как предоставить контроллеру информацию о текущем положении полюсов магнита ротора и фронта электромагнитной волны в обмотке?
Для этого, в конструкцию бесколлекторного двигателя включена печатная плата, с размещенными на ней датчиками Холла.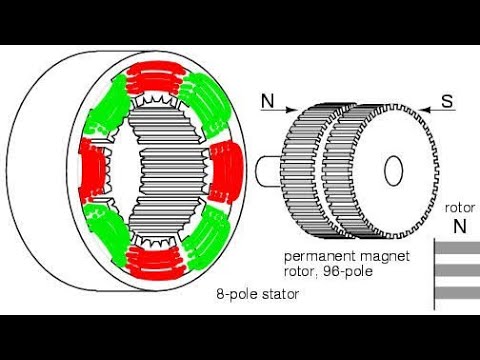 Как правило, датчиков три и размещены они, соответственно, под углом в 120° друг к другу.
Как правило, датчиков три и размещены они, соответственно, под углом в 120° друг к другу.
Сигнал, поступающий на контроллер с этих трех датчиков, в сочетании с предварительно указанным контроллеру количеством пар полюсов магнитов ротора двигателя, позволяет однозначно определить положение ротора двигателя в любой момент времени и предельно своевременно обеспечивать переключение фаз обмотки. Таким образом обеспечивается плавное непрерывное вращение двигателя на любых скоростях (от минимальных до максимальных рабочих).
Также, естественно при условии качественного изготовления двигателя, балансировка обмотки и надежные опорные подшипники ротора исключают возникновение вибрации двигателя и ее распространение по нагрузке и элементам конструкции. Отсутствие квазистабильных состояний и плавное движение фронта электромагнитной волны по обмотке обеспечивают предельно низкий уровень, производимой двигателем, электромагнитной помехи. Как правило весь «объем» помехи эффективно гасится конструктивными элементами двигателя и не выходит за пределы его корпуса – такие двигатели могут безопасно использоваться в непосредственной близости от чувствительного оборудования – медицинского, лабораторного, промышленного. Аналогичное утверждение относится и к контроллерам бесколлекторных двигателей – как правило, эти устройства соответствуют самым строгим требованиям современных стандартов по электробезопасности, в том числе и по электромагнитной совместимости.
Как правило весь «объем» помехи эффективно гасится конструктивными элементами двигателя и не выходит за пределы его корпуса – такие двигатели могут безопасно использоваться в непосредственной близости от чувствительного оборудования – медицинского, лабораторного, промышленного. Аналогичное утверждение относится и к контроллерам бесколлекторных двигателей – как правило, эти устройства соответствуют самым строгим требованиям современных стандартов по электробезопасности, в том числе и по электромагнитной совместимости.
Особенности бесколлекторных двигателей
Из уже описанного видно – управлять бесколлекторным двигателем существенно сложнее чем шаговым. Такие двигатели требуют значительно более совершенной и, следовательно, дорогой электронной оснастки. Однако, как это часто бывает – эта палка тоже о двух концах. Контроллеры бесколлекторных двигателей – это гибкие многофункциональные устройства, оснащенные поддержкой разнообразных датчиков (сверх датчиков Холла), оснащенные ассортиментом цифровых и аналоговых входов/выходов, позволяющих организовать различные схемы управления, обеспечить простой, удобный и интуитивно понятный интерфейс взаимодействия, интегрировать привод в более сложную глобальную систему контроля.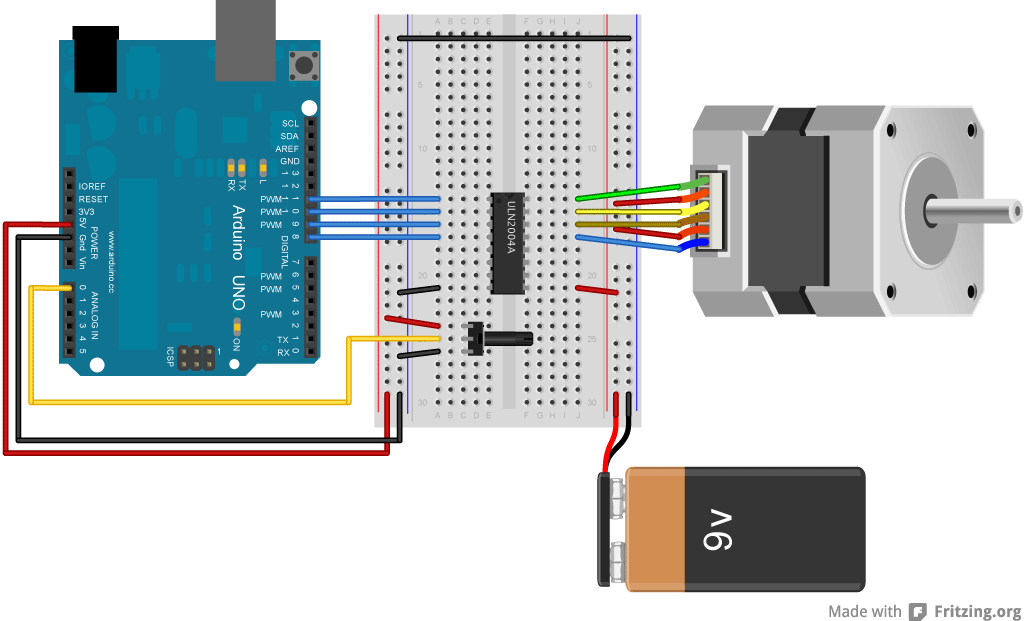
Контроллеры бесколлекторных двигателей, в зависимости от своего назначения и сложности, реализуют два или три вложенных контура управления. Контур тока – обеспечивает точное управление и контроль уровней тока в обмотках двигателя для обеспечения оптимальной величины крутящего момента и предельного снижения токовых потерь в обмотке. Контур скорости – с помощью сигналов датчиков Холла и энкодера (если он присутствует в системе) обеспечивает тонкое управление напряжением на фазах обмотки для поддержания плавности вращения, сглаживания флуктуаций скорости, возникающих из-за эффектов нагрузки, и реализацию различных профилей разгона, торможения и поддержания скорости на траектории движения. Контур положения – при наличии одного или более энкодеров обеспечивает расчёт и исполнение траектории движения, контроль выхода нагрузки в заданное положение, отслеживание положения нагрузки вне фаз движения (перемещение нагрузки под действием внешней силы).
Итак, бесколлекторные двигатели сложнее и дороже шаговых сами по себе и, кроме того, требуют использования более сложной электроники управления.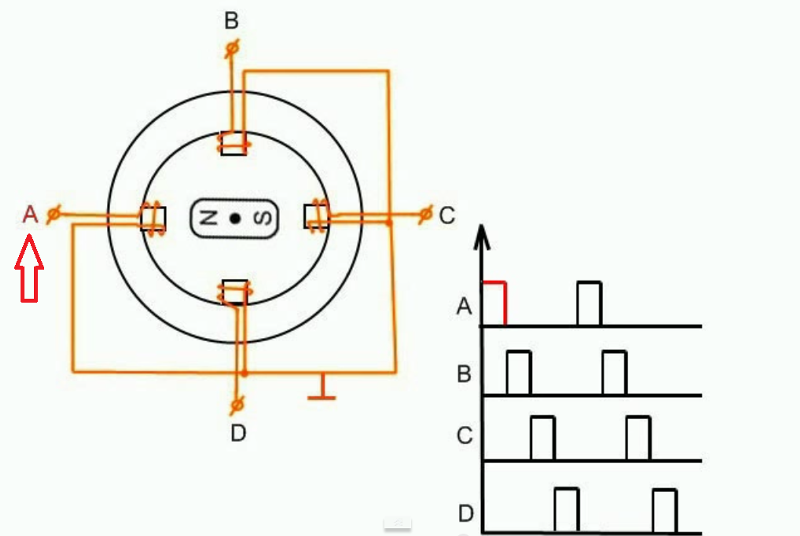 В чем же преимущества их использования?
В чем же преимущества их использования?
Преимущества бесколлекторного двигателя
О чем-то мы уже сказали – плавность вращения, возможность работы на малых скоростях, отсутствие ограничений по величине угла поворота, удобство контроля и интеграции в сети управления верхнего уровня. Кроме того, бесколлекторные двигатели, как правило, компактнее и легче (при сравнимой или лучшей производительности), они обладают значительно лучшей динамикой движения и соотношением момент/скорость. При сравнимой производительности потребляют меньшие рабочие токи, имеют существенно лучший КПД и меньшие уровни токовых потерь, в большей степени соответствуют требованиям электромагнитной совместимости.
Какой двигатель выбрать — бесколлекторный или шаговый
Главный вопрос – что же лучше – бесколлекторный или шаговый двигатель? Даже основываясь на всем сказанном – однозначного ответа нет. Ключевым встречным вопросом будет – а что Вы хотели бы получить от двигателя?
Вам нужно предельно простом способом открывать и закрывать створку ворот, размер и вес двигателя особого значения не имеет – в таком раскладе дешевый шаговый двигатель вполне осмысленное решение. Хотя даже тут стоит заметить – крупный производитель лифтового оборудования, компания «Отис», некоторое время назад полностью отказалась от использования шаговых двигателей в приводах открывания дверей и заменила их на бесколлекторные. Комментарий менеджмента был примерно следующий – «повышенная стоимость новых приводов полностью компенсируется кратным снижением расходов на текущее обслуживание, ремонт и замену» (не является цитатой).
Хотя даже тут стоит заметить – крупный производитель лифтового оборудования, компания «Отис», некоторое время назад полностью отказалась от использования шаговых двигателей в приводах открывания дверей и заменила их на бесколлекторные. Комментарий менеджмента был примерно следующий – «повышенная стоимость новых приводов полностью компенсируется кратным снижением расходов на текущее обслуживание, ремонт и замену» (не является цитатой).
Открываем вентиляционный люк или люк дымоудалительной системы. Ну, тут просто – если нашелся подходящий по габаритам шаговый двигатель – решение нормальное. Главное следить за исправностью, чтобы в час «Ч» все работало.
Двигаем части медицинской кровати или операционного/процедурного стола – при всем уважении, от шагового двигателя лучше отказаться. Во избежание.
Проектируем промышленную систему с несколькими подвижными осями и точным позиционированием. На вкус и цвет… Но сложность системы управления для любого из типов двигателей будет существенной, а гибкость самих бесколлекторных приводов и их контроллеров обеспечит значительный прирост производительности и эргономичности.
В общем и целом, шаговые двигатели постепенно проигрывают соперничество со старшими бесколлекторными собратьями. Нет, мы не ждем, что шаговый двигатель сойдет со сцены в ближайшее время и канет в пучину истории – ниша для этого неплохого, хоть и специфического типа приводов, найдется. Однако, потребность рынка в большей гибкости, эффективности и адаптивности решений однозначно склоняет чашу весов в сторону более современных бесколлекторных двигателей. А последние тенденции развития рынка выводят на первый план их отдельный подтип – моментные двигатели, о специфике и отличиях которых мы поговорим в каком-нибудь отдельном материале.
Шаговый двигатель
Итак, мы уже рассказали, как устроен серво мотор и сегодня начнем разбирать шаговый двигатель, его схему, драйверы управления и то, где его лучше всего использовать!
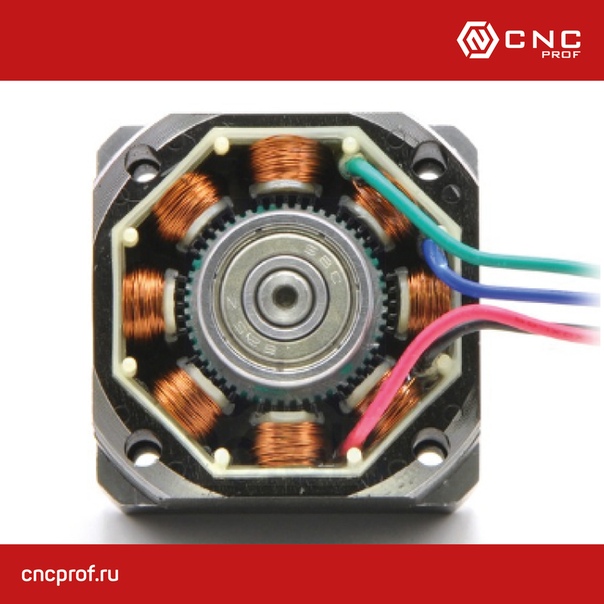
Начнем мы с того, что «на пальцах» рассмотрим принцип функционирования данной железяки.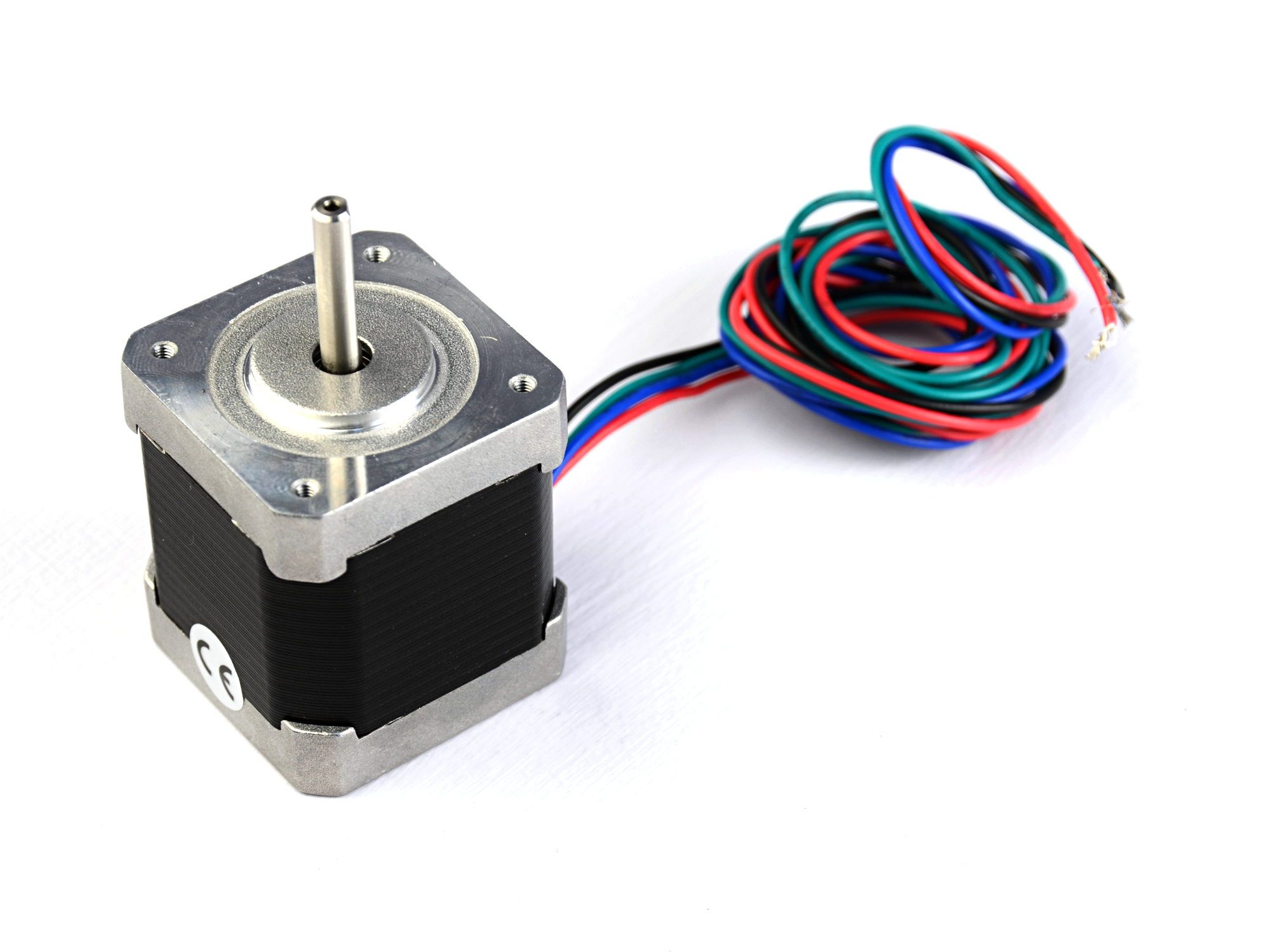 Каждый шаговик имеет внутри себя несколько электромагнитов, расположенных вокруг вала. Подавая питание в нужной последовательности на каждую из них, вращающийся элемент двигателя стремится примагнититься катушке. Быстрым переключением питания между электромагнитами можно добиться большой скорости вращения вала мотора и перемещать его в любое положение с большой точностью. Однако для обеспечения этой точности используются различные вспомогательные устройства, так как такой тип двигателя имеет крайне неприятной эффект вибрации. О таких нюансах мы и расскажем далее!
Каждый шаговик имеет внутри себя несколько электромагнитов, расположенных вокруг вала. Подавая питание в нужной последовательности на каждую из них, вращающийся элемент двигателя стремится примагнититься катушке. Быстрым переключением питания между электромагнитами можно добиться большой скорости вращения вала мотора и перемещать его в любое положение с большой точностью. Однако для обеспечения этой точности используются различные вспомогательные устройства, так как такой тип двигателя имеет крайне неприятной эффект вибрации. О таких нюансах мы и расскажем далее!
Любой шаговый двигатель имеет два основных элемента: ротор (вал мотора) и статор (неподвижный корпус). Первый состоит из обычных магнитов, а второй — из электрических, управляемых катушек. Стоит отметить, что как раз за счет шагов от одной катушке к другой в шаговиках присутствует вибрация, вызванная инерцией вала мотора. Профили магнитов, принципы управления электромагнитами — все это разделяет шаговики на типы и наделяет их своими плюсами и минусами.
Разделим шаговики на 3 основных класса:
- Переменный шаговый двигатель
Ротор не имеет постоянных магнитов, а оснащен ферромагнитной шестерней. Это материал, который крайне эффективно магнититься, но не так сильно по сравнению с постоянным. Это приводит к проигрышу в крутящем моменте. Зато отсутствует стопорящая сила, возникающая за счет магнитного поля между корпусом мотора и ротором с постоянным магнитом, которую легко почувствовать, покрутив шаговик в выключенном состоянии (характерные щелчки).
Движок оснащен большим количеством катушек, которые включаются попарно. Величина шага варьируется от 5 до 15 градусов. - Шаговый двигатель с постоянным магнитом
Ротор такого устройства состоит из нескольких разнополюсных магнитов. Принцип разбирали в самом начале. Характерный шаг от 45 до 90 градусов.
- Гибридный шаговый двигатель
Как можно догадаться, данный тип совместил в себе первые два и унаследовал все плюсы. Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.
Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.
Но достаточно просто создать два таких диска, имеющих противоположные полюса. Затем их сдвигают так, что если посмотреть сбоку, получится то, что мы и хотели. Осталось правильным образом расположить обмотки и включать их по оптимальной логике, обеспечивающей наибольшую эффективность!
 Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.
Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.Теперь давайте пробежимся по методам управления шаговыми двигателями. Их также можно разделить на несколько пунктов:
- Полношаговое управление одной обмоткой
Это самый простой вариант. Последовательно включается только одна катушка и к ней притягивается вал мотора. В таком случае крутящий момент будет меньше чем в следующем способе. - Полношаговое управление двумя обмотками
Принцип такой же, как и в предыдущем случае, но теперь управление идет парой электромагнитов. Это обеспечивает максимальный крутящий момент мотора, но требует в два раза больше тока или напряжения (зависит от метода подключения катушек друг к другу). - Полушаговое управление
Данная логика включения катушек позволит увеличить число шагов, а, следовательно, и точность в 2 раза! Аналогично предыдущим пунктам, можно управлять одной катушкой или парой. Вся фишка в том, что в данном случае переход на следующую катушку происходит не при полном выключении предыдущей. То есть, при работе двух соседних катушек вал мотора встает в промежуточное состояние.
- Сверхточное управление
Наверное, у многих после предыдущего пункта появилась мысль: а что если мы будем подавать разную мощность на две соседние катушки, меняющуюся по определенному закону, и получим еще больше промежуточных шагов? Именно так и устроены современные двигатели в сверхточных ЧПУ и прочих подобных устройствах. Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.
 В таком случае крутящий момент будет меньше чем в следующем способе.
В таком случае крутящий момент будет меньше чем в следующем способе. Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.
Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.В качестве примера в данной статье рассмотрим подключения двух шаговых двигателей к плате Arduino. Для начала рассмотрим мотор 17hs4401, которой используется в 3D принтерах. Данная модель является биполярной, то есть у нас есть две пары обмоток от которых идет 4 кабеля.
Шаговый двигатель 17hs4401 обладает большим крутящим моментом и может питаться от сети 12 V. Чтобы не перегружать нашу плату управления большими мощностями, шаговик подключается к ней с помощью специального драйвера А4988, который способен работать в жестких условиях (до 35 V и 2 А).
Слабые управляющие сигналы с Arduino идут на драйвер, а тот уже взаимодействует с 17hs4401 с более мощными параметрами по току и напряжению.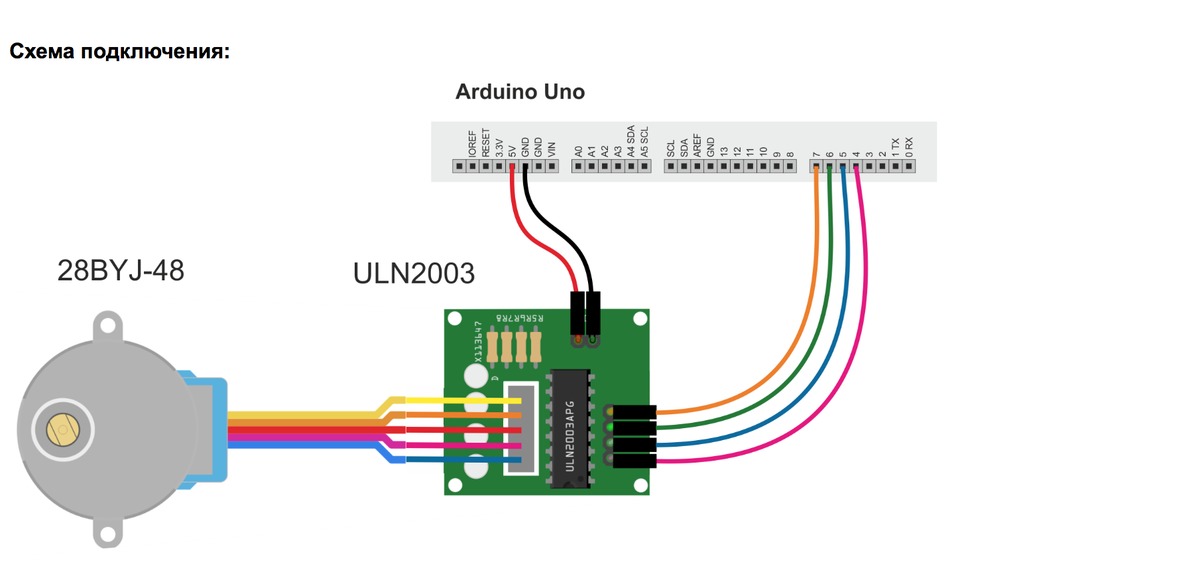 К ножкам A4988 VDD и GND подводится питание логического уровня (3 — 5,5 В), к VMOT и GND — питание двигателя (8 — 35 В). Стоит отметить, что в данной системе бывают скачки напряжения, которые могут привести к поломке оборудования. Поэтому (на 3D принтерах всегда) ставят большие конденсаторы (более 47 мкФ). Драйвер имеет болт, который регулирует силу тока. Работая на предельных значениях, вы рискуете сжечь его, особенно если не наклеен радиатор, идущий в комплекте с устройством.
К ножкам A4988 VDD и GND подводится питание логического уровня (3 — 5,5 В), к VMOT и GND — питание двигателя (8 — 35 В). Стоит отметить, что в данной системе бывают скачки напряжения, которые могут привести к поломке оборудования. Поэтому (на 3D принтерах всегда) ставят большие конденсаторы (более 47 мкФ). Драйвер имеет болт, который регулирует силу тока. Работая на предельных значениях, вы рискуете сжечь его, особенно если не наклеен радиатор, идущий в комплекте с устройством.
Шаговик 17hs4401 за полный оборот совершает 200 шагов. Это весьма неплохо, но для лучшего позиционирования (крайне важно для ЧПУ) используют схему управления с микрошагами, которую мы изучили ранее. A4988 позволяет осуществлять такую процедуру с коэффициентами 1/2, 1/4, 1/8 и 1/16 шага (комбинируя управление через выходы MS1, MS2, и MS3).
| MS1 | MS2 | MS3 | Step |
| Low | Low | Low | Full |
| High | Low | Low | 1/2 |
| Low | High | Low | 1/4 |
| High | High | Low | 1/8 |
| High | High | High | 1/16 |
Пин STEP отвечает за микрошаг шаговика, DIRECTION — за направление вращения.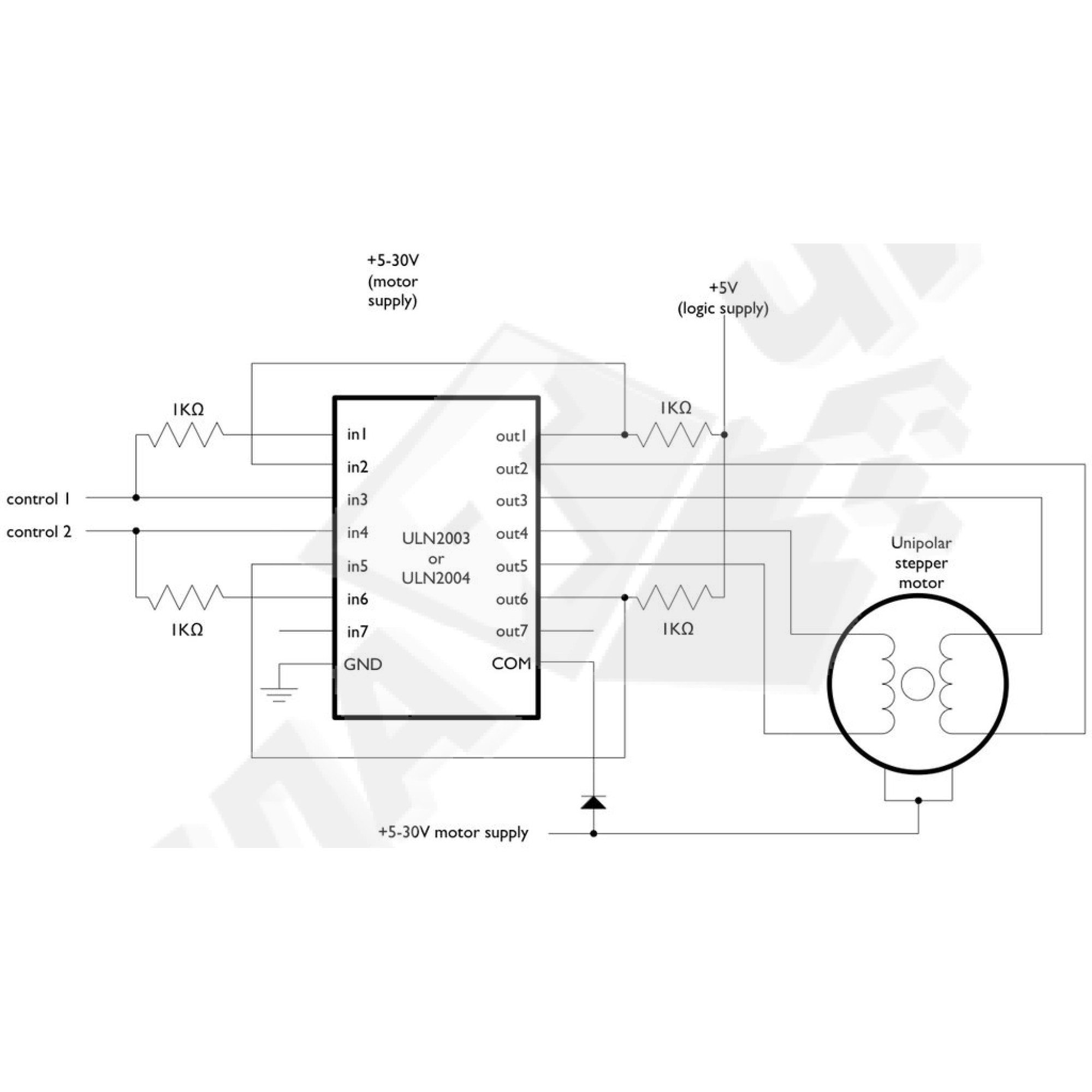 Выводы STEP и DIRECTION не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому их не стоит оставлять плавающими при создании приложений. Если требуется вращать двигатель в одном направлении,коннектим DIR с VCC или GND. Драйвер имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENABLE. Вывод RESET плавает, если его не нужно использовать, то следует подключить его к SLEEP, чтобы подать на него высокий уровень и включить плату.
Выводы STEP и DIRECTION не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому их не стоит оставлять плавающими при создании приложений. Если требуется вращать двигатель в одном направлении,коннектим DIR с VCC или GND. Драйвер имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENABLE. Вывод RESET плавает, если его не нужно использовать, то следует подключить его к SLEEP, чтобы подать на него высокий уровень и включить плату.
Теперь давайте перейдем непосредственно к подключению данного мотора к микрокомпьютеру. Соединяем контакты согласно указанной ниже схеме:
Обычно, такие моторы используются любителями при сборке 3d принтеров своими руками. Для этого используют Arduino MEGA и шилд ramps 1.4, о котором мы говорили в этой статье. Удобство использования данного комплекта состоит в том, что не нужно соединять кучу проводов — за вас уже все разведено. Таким образом, легко подключить сразу до 5 шаговиков!
Таким образом, легко подключить сразу до 5 шаговиков!
Более простым и дешевым вариантом шагового мотора является модель 28byj-48. Его подключение немного запутанное, но несмотря на это он пользуется большой популярностью у любителей собирать роботов! Поэтому мы немного расскажем о том, как 28byj-48 подключить к Arduino. В первую очередь нам понадобиться драйвер ULN2003APG. Это очень дешевая железяка, встречается как готовая плата с разъемами, так и просто чип с голыми ножками. Сначала посмотрим, как подключать второй вариант.
На данной картинке покано подключение двух шаговых двигателей к плате Arduino Nano. C обратной стороны драйвера все ножки соединяем с цифровыми пинами, кроме крайней правой — ее ведем к GND. При программировании вам потребуется осуществить настройку моторов к пинам и в этом случае необходимо указать правильную последовательность: оранжевый, синий, желтый, розовый. Именно в таком порядке необходимо будет подавать управляющий сигнал с ножек микропроцессора. Как видно на рисунке, красный провод левого коннектора не попадает на ULN2003APG — его необходимо соединить с выходом 5V или VIN.
Как видно на рисунке, красный провод левого коннектора не попадает на ULN2003APG — его необходимо соединить с выходом 5V или VIN.
Есть более простой способ подключения шаговика 28byj-48 через готовую плату с коннектором:
На всякий случай приведем распиновку драйвера:
На этом у нас все, если будут вопросы — всегда готовы ответить!
Все, что вам нужно знать о шаговых двигателях
Это руководство является частью нашего центра промышленной автоматизации , где вы можете узнать больше об искусственном интеллекте, автоматизации и управлении.
В этом руководстве мы дадим краткий обзор того, как именно работает шаговый двигатель, прежде чем перейти к рассмотрению некоторых из наиболее распространенных примеров, доступных на рынке, и многочисленных видов повседневных ролей, которые они выполняют. лучше всего подходит для.
Что такое шаговый двигатель?
Шаговый двигатель – это тип бесщеточного синхронного двигателя постоянного тока, который, в отличие от многих других стандартных типов электродвигателей , не просто непрерывно вращается в течение произвольного числа оборотов, пока не будет отключено постоянное напряжение, подаваемое на него.
Вместо этого шаговые двигатели представляют собой тип цифрового устройства ввода-вывода для точного пуска и останова. Они сконструированы таким образом, что ток, проходящий через них, попадает на серию катушек, расположенных по фазам, которые можно включать и выключать в быстрой последовательности. Это позволяет двигателю совершать часть оборота за раз, и эти отдельные заранее определенные фазы мы называем «шагами».
Шаговый двигатель предназначен для разбиения одного полного оборота на несколько гораздо меньших (и практически равных) частичных оборотов. В практических целях их можно использовать для указания шаговому двигателю двигаться на заданные градусы или углы поворота. Конечным результатом является то, что шаговый двигатель можно использовать для передачи мельчайших точных движений механическим частям, требующим высокой степени точности.
Шаговые двигатели обычно имеют цифровое управление и являются ключевыми компонентами системы позиционирования с управлением движением без обратной связи.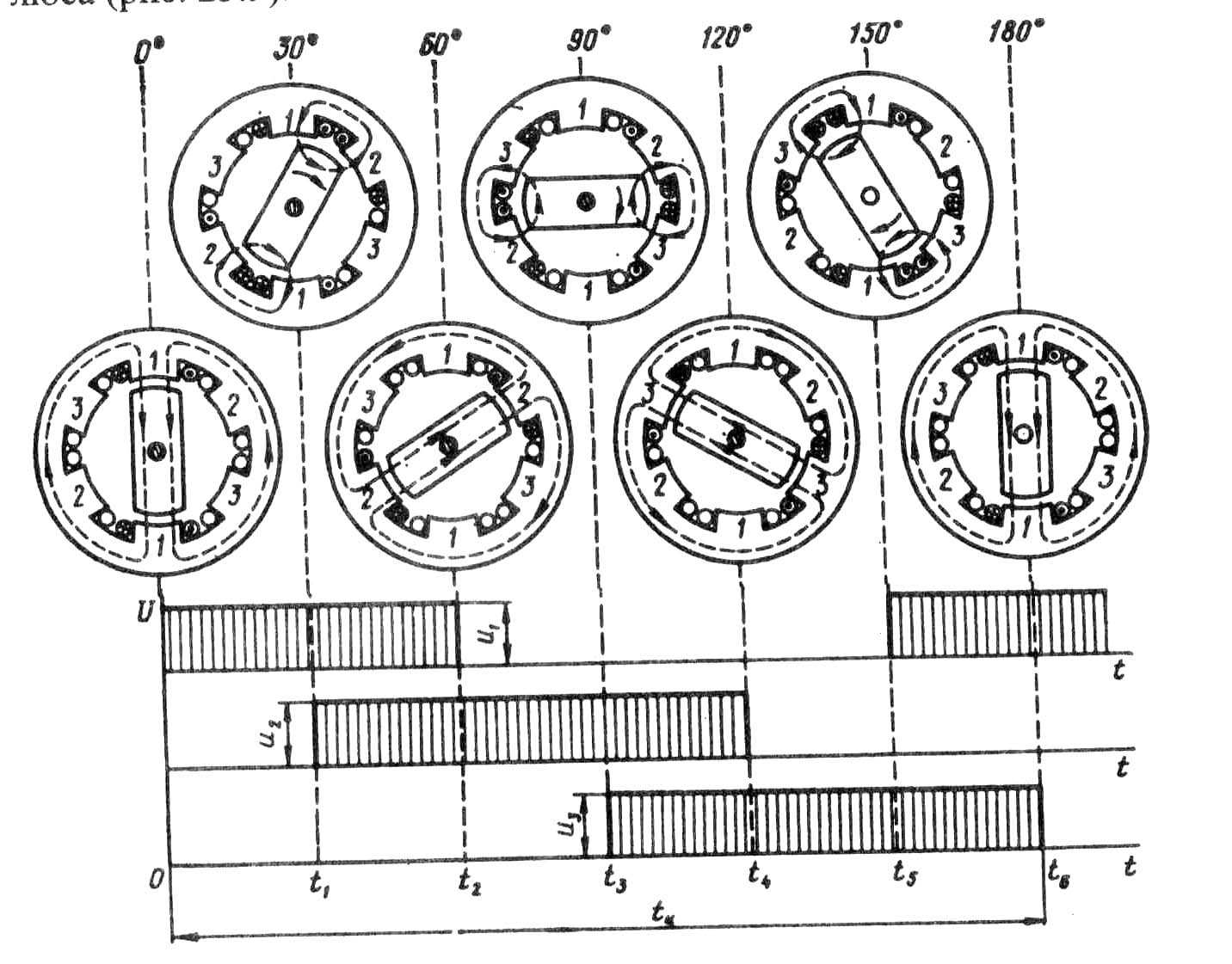 Они чаще всего используются в приложениях удержания или позиционирования, где их способность устанавливать гораздо более четко определенные положения вращения, скорости и крутящие моменты делают их идеально подходящими для задач, требующих чрезвычайно строгого контроля движения.
Они чаще всего используются в приложениях удержания или позиционирования, где их способность устанавливать гораздо более четко определенные положения вращения, скорости и крутящие моменты делают их идеально подходящими для задач, требующих чрезвычайно строгого контроля движения.
Просмотреть все шаговые двигатели
Как работают шаговые двигатели?
В обычном щеточном двигателе постоянного тока напряжение подается на клеммы, что, в свою очередь, заставляет проволочную катушку вращаться со скоростью внутри корпуса с фиксированным магнитом («статор»).
В этой установке катушка с вращающейся проволокой («ротор») фактически становится электромагнитом и быстро вращается в центре двигателя на основе знакомого принципа магнитного притяжения и отталкивания. Комбинация щеток (электрических контактов) и поворотного электрического переключателя, известного как коммутатор, позволяет быстро менять направление тока, идущего к проволочной катушке. Это создает непрерывное однонаправленное вращение катушки ротора до тех пор, пока на сборку подается достаточное напряжение.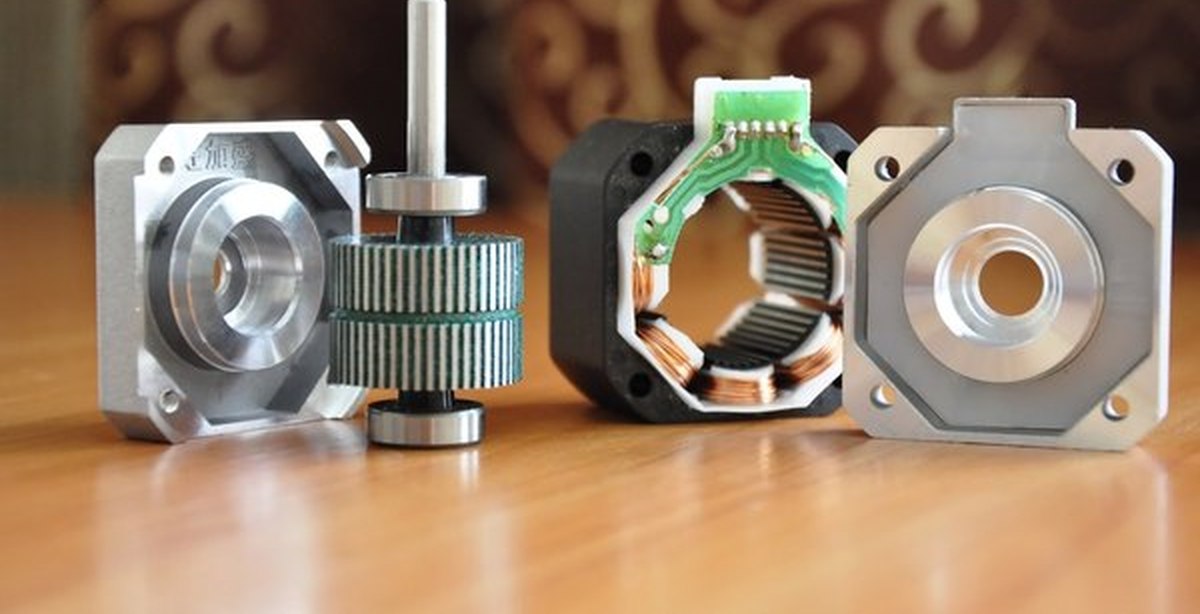
Потенциальным недостатком этого типа двигателя является то, что он вращается непрерывно и делает произвольное количество оборотов, пока не отключится питание. Из-за этого очень сложно контролировать точную точку остановки двигателя, что делает его непригодным для приложений, требующих более точного управления. Ручное управление включением/выключением подачи мощности на двигатель не может обеспечить требуемую точность старт-стоп для выполнения движений с точностью до минуты.
В шаговом двигателе установка совсем другая. Вместо ротора с проволочной катушкой, вращающегося внутри неподвижного корпуса магнитов, шаговые двигатели построены с фиксированным корпусом из проволоки (в данном случае статором), расположенным вокруг ряда «зубчатых» электромагнитов, вращающихся в центре. Шаговый двигатель преобразует пульсирующий электрический ток, управляемый Драйвер шагового двигателя , в точные одношаговые движения этого зубчатого компонента вокруг центрального вала.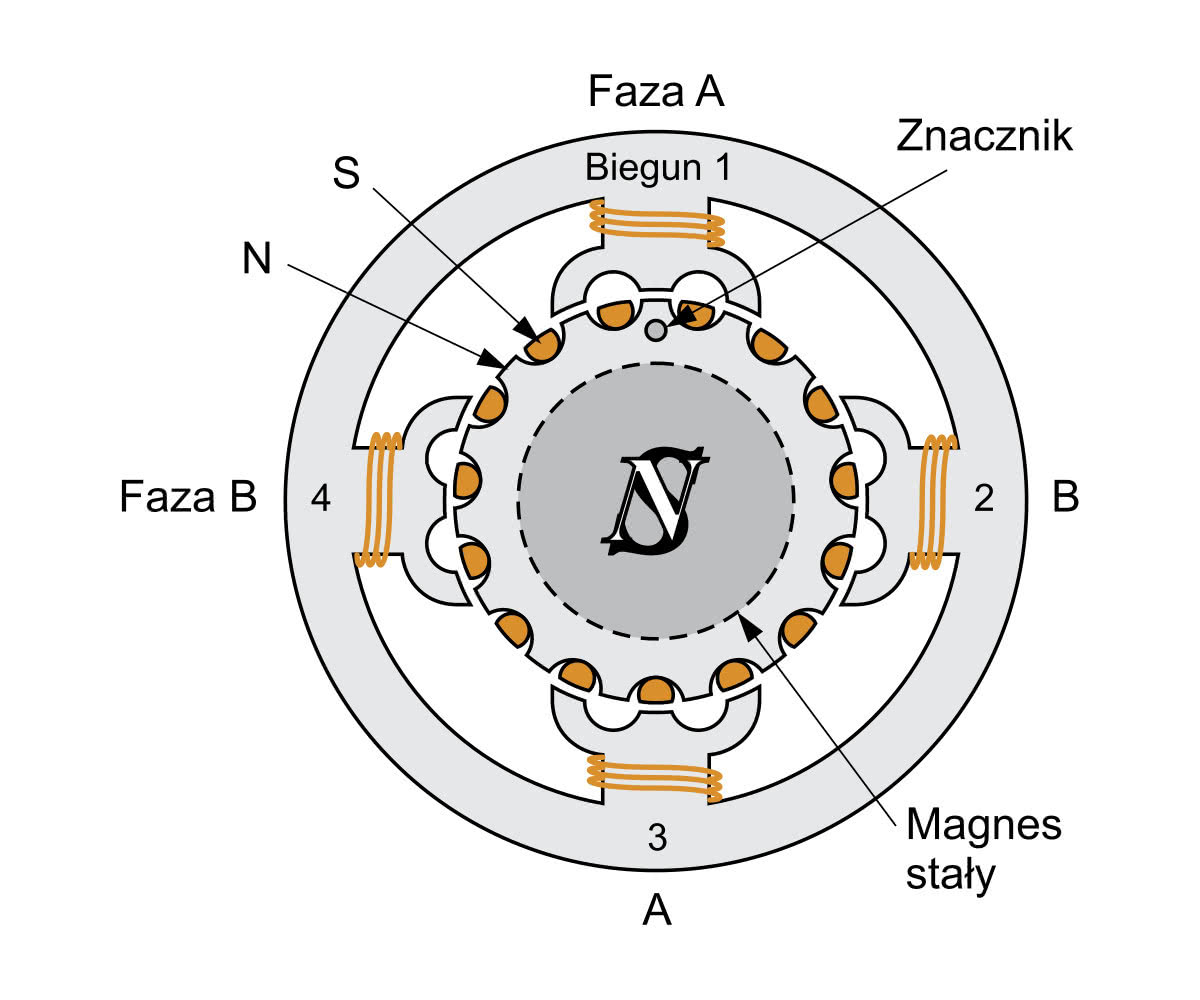
Каждый из этих импульсов шагового двигателя перемещает ротор на один точный и фиксированный шаг полного оборота. Поскольку ток переключается между проволочными катушками, расположенными последовательно вокруг двигателя, вращающаяся часть может совершать полные или частичные обороты по мере необходимости, или ее можно заставить очень резко останавливаться на любом из шагов вокруг ее вращения.
В конечном счете, реальная сила шагового двигателя по сравнению с обычными коллекторными двигателями постоянного тока заключается в том, что они могут быстро найти известное и повторяемое положение или интервал, а затем удерживать это положение столько времени, сколько потребуется. Это делает их чрезвычайно полезными в высокоточных приложениях, таких как робототехника и печать. Компания Learn Engineering создала приведенное ниже видео, демонстрирующее, как работает шаговый двигатель:
 youtube.com/embed/eyqwLiowZiU»>
youtube.com/embed/eyqwLiowZiU»> Типы шаговых двигателей
Продается множество типов шаговых двигателей, и знание того, что делает каждый из различных типов, поможет вам решить, какой тип лучше всего подходит для вашего приложения.
Биполярный шаговый двигатель
Биполярный шаговый двигатель имеет встроенный драйвер, который использует схему Н-моста для реверсирования тока, протекающего по фазам. При подаче питания на фазы при смене полярности все катушки можно заставить работать, вращая двигатель.
С практической точки зрения это означает, что обмотки катушки лучше используются в биполярном, чем в стандартном униполярном шаговом двигателе (который использует только 50 % проволочных катушек в любой момент времени), что делает биполярные шаговые двигатели более мощными и эффективными в работе. . Хотя биполярные шаговые двигатели технически более сложны в управлении, они, как правило, имеют встроенный чип драйвера, который обрабатывает большую часть необходимых инструкций и действий.
Недостатком является то, что изначально они обычно дороже, чем стандартные монополярные версии, потому что 9Униполярные шаговые двигатели 0017 не требуют реверсирования тока для выполнения шаговых функций — это делает их внутреннюю электронику намного проще и дешевле в производстве.
Магазин биполярных шаговых двигателей
Гибридный шаговый двигатель
Гибридные шаговые двигатели обеспечивают еще большую точность благодаря таким методам, как полушаг и микрошаг. Микрошаг — это способ увеличения фиксированного количества шагов в двигателе путем программирования драйвера для отправки на катушки переменного синусоидального/косинусоидального сигнала. Это часто означает, что шаговые двигатели можно настроить так, чтобы они работали более плавно и точно, чем при стандартной настройке.
Гибридные шаговые двигатели обычно имеют полюса или зубья, смещенные на двух разных чашках снаружи магнитного ротора. Это также означает более точное управление шагами и вращением, а также более тихую работу, более высокое отношение крутящего момента к размеру и более высокие выходные скорости, чем стандартные шаговые двигатели.
Магазин гибридных шаговых двигателей
Для чего используется шаговый двигатель?
Шаговые двигатели имеют широкий спектр применений во многих отраслях и областях, при этом некоторые из наиболее распространенных применений:
- Компьютеры
- Робототехника
- Камеры
- Печать и сканирование, в том числе на 3D-принтерах
- Автоматизация процессов и упаковочное оборудование
- Позиционирование ступеней пилотного клапана для систем управления жидкостью
- Оборудование для точного позиционирования
В этом разделе мы более подробно рассмотрим некоторые из этих повседневных приложений.
Шаговые двигатели для 3D-принтеров
Общие списки деталей для 3D-принтеров почти всегда включают шаговый двигатель с тем или иным описанием. Это связано с тем, что использование шагового двигателя в 3D-принтере является высокоточным и экономичным способом выполнения очень точных действий и вращений, когда принтер пытается преобразовать информацию с цифровых сканов в физические 3D-объекты.
Шаговые двигатели и драйверы в 3D-принтерах обеспечивают строго контролируемое движение по осям X, Y и Z как по отдельности, так и одновременно, а это означает, что исключительная точность движения и позиционирования достижима без использования энкодеров и другого дополнительного программного обеспечения или датчиков. .
Большинство 3D-принтеров включают в себя несколько шаговых двигателей — они обычно находятся как на самих платформах для сборки, так и в экструдерах нити, где они используются для протягивания нити и контроля постоянной и равномерной подачи материала в машину на протяжении всего процесса. полная продолжительность тиража.
Шаговые двигатели для ЧПУ
Шаговые двигатели являются альтернативой серводвигателям для питания большинства типов станков с ЧПУ. Приложения ЧПУ включают в себя очень широкий спектр производственных процессов, в которых предварительно запрограммированное компьютерное программное обеспечение управляет работой и физическим перемещением станков в заводских и производственных условиях.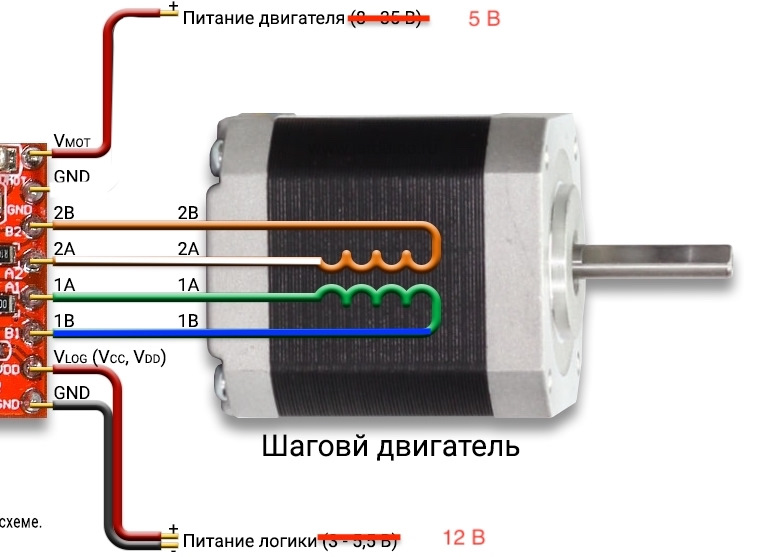
Хотя шаговые двигатели в приложениях с ЧПУ часто рассматриваются как более «бюджетная» альтернатива серводвигателям , это упрощение, основанное на знании старых технологий, которые сегодня не всегда точны. Шаговые двигатели действительно обычно дешевле серводвигателей той же мощности, но современные версии, как правило, столь же универсальны. В результате шаговые двигатели стали гораздо более доступными и используются в гораздо более широком спектре машин и систем, от станков до настольных компьютеров и автомобилей.
Шаговые двигатели с ЧПУ также имеют одно ключевое преимущество перед серводвигателями, заключающееся в том, что для них не требуется энкодер. Серводвигатели по своей природе более сложны для понимания и эксплуатации, чем версии с шаговыми двигателями, и часть этой сложности заключается в том, что они включают в себя энкодер, который более подвержен отказам, чем большинство компонентов надежного в остальном серводвигателя. Шаговым двигателям не нужен энкодер, что теоретически делает их более надежными, чем сервоприводы.
Кроме того, тот факт, что шаговые двигатели также являются бесщеточными (в отличие от серводвигателей), означает, что они не требуют регулярной плановой замены при условии, что их подшипники остаются в хорошем рабочем состоянии.
Шаговые двигатели для Raspberry Pi
Шаговые двигатели — чрезвычайно распространенное периферийное устройство для добавления к одноплатным вычислительным модулям Raspberry Pi для домашних энтузиастов, изучающих основы базовых навыков компьютерного программирования.
Стартовые комплекты Raspberry Pi обычно продаются в очень простой конфигурации, при этом идея состоит в том, что отдельный пользователь будет добавлять в свою систему любые дополнительные компоненты в том порядке, в котором он хочет узнать о них, добавляя к своему набору навыков, изучая для управления новыми компонентами с помощью языков программирования, таких как Python.
В сообществе пользователей Raspberry Pi обучение манипулированию и управлению небольшими недорогими шаговыми двигателями очень часто рассматривается как логичный следующий шаг после обучения управлению циклами включения/выключения светодиодов и другими простыми типами переключателей или зуммеров.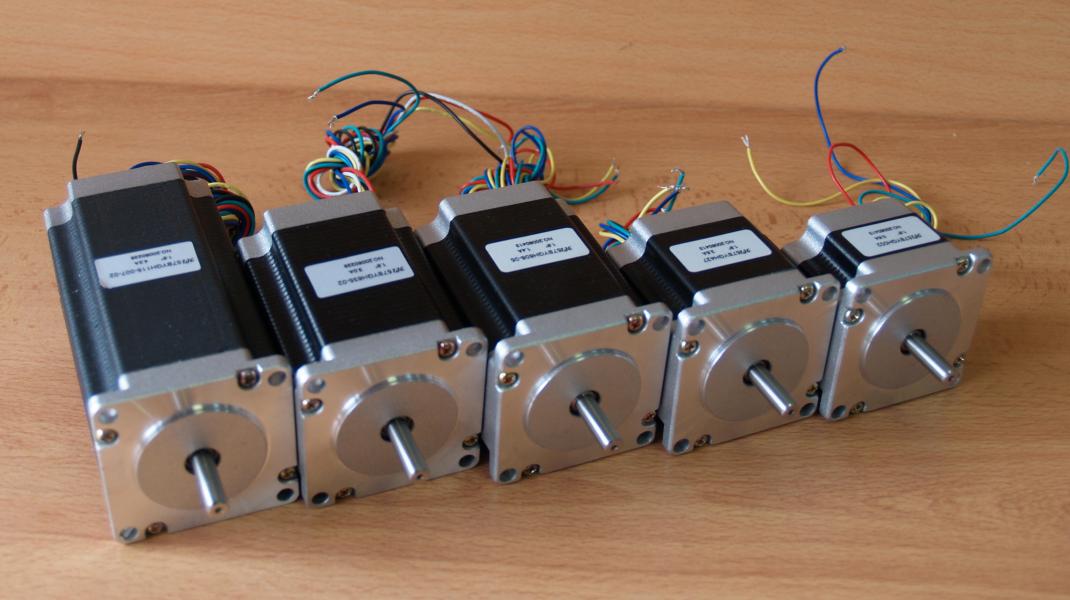 По сути, последовательно соединив пару таких шаговых двигателей, домашние любители могут приступить к созданию простого и программируемого робота.
По сути, последовательно соединив пару таких шаговых двигателей, домашние любители могут приступить к созданию простого и программируемого робота.
На рынке Великобритании доступно множество подходящих типов шаговых двигателей для такого типа приложений, начиная с очень недорогих версий на 5 В, которые легко соединяются с разъемами на материнской плате Raspberry Pi.
Шаговые двигатели для камер
Шаговые двигатели широко используются в различных приложениях в высокотехнологичных камерах. Они используются как для управления высокоточными внутренними компонентами, такими как настройки автофокуса и диафрагмы в объективе, так и в корпусах и внешней механике камер безопасности и систем удаленного мониторинга.
В частности, шаговые двигатели и моторизованные ползунки камеры обеспечивают очень плавную работу устройств позиционирования камеры, а это означает, что кадры, снятые с устройств безопасности, могут быть надежно защищены от потенциально проблематичного искажения изображения, вызванного физическим движением камеры вокруг ее поля зрения. вид.
вид.
Шаговые двигатели обладают рядом других привлекательных особенностей для использования в системах позиционирования камер и систем видеонаблюдения, включая полный крутящий момент в состоянии покоя, чрезвычайно точное и мгновенное время отклика на все входные данные движения, постоянную повторяемость заранее определенных движений и простое управление без обратной связи, определяемое фиксированные размеры шага.
Резюме
Шаговые двигатели — это невероятно универсальный, надежный, экономичный и точный способ управления точными движениями двигателей, позволяющий пользователям повысить ловкость и эффективность запрограммированных движений в огромном разнообразии приложений и отраслей. Таким образом, они образуют важное и широко используемое подмножество в гораздо более широкой категории автоматика и аппаратура управления .
Поскольку в Великобритании и по всему миру продается так много марок шаговых двигателей, размеров, значений крутящего момента, стилей конструкции и предполагаемых областей применения, при планировании покупки крайне важно точно определить, какая конфигурация лучше всего подходит для конкретных пользовательских сред.
Популярные марки шаговых двигателей
Нажмите на ссылки ниже, чтобы просмотреть коронки некоторых из наших самых популярных марок.
Куда дальше?
Если вы хотите узнать больше о различных типах двигателей или хотите посетить наш центр промышленной автоматизации, просто перейдите по ссылкам ниже.
Руководство по двигателям постоянного тока
Руководство по двигателям переменного тока
Промышленная автоматизация
Свяжитесь с нами
03457 201201
Следуйте за нами на
Мы принимаем
Наши услуги
- Спецификации
- Калибровка
- Вариант доставки
- История заказов
- Предложения
- Возвраты
- Расписание заказов
- DesignSpark
Юридическая информация
- Политика в отношении файлов cookie
- Безопасность электронной почты
- Политика конфиденциальности
- Условия веб-сайта
- Условия продажи
О RS
- О нас
- Карьера
- Корпоративная группа
- События
- ESG
- Наши сертификаты
- Пресс-центр
- Весь мир
 Birchington Road, Corby, Northants, NN17 9RS, UK
Birchington Road, Corby, Northants, NN17 9RS, UK Основы шагового двигателя
Каждый двигатель преобразует мощность. Электродвигатели преобразуют электричество в движение. Шаговые двигатели преобразуют электричество во вращение. Шаговый двигатель не только преобразует электрическую энергию во вращение, но и может очень точно контролировать, насколько далеко он будет вращаться и как быстро.
Шаговые двигатели названы так потому, что каждый импульс электричества поворачивает двигатель на один шаг. Шаговые двигатели управляются драйвером, который посылает импульсы в двигатель, заставляя его вращаться. Количество импульсов, которые вращает двигатель, равно количеству импульсов, подаваемых на драйвер. Двигатель будет вращаться со скоростью, равной частоте тех самых импульсов.
Шаговые двигатели очень просты в управлении. Большинство драйверов ищут 5-вольтовые импульсы, которые являются уровнем напряжения большинства интегральных схем. Вам просто нужно разработать схему для вывода импульсов или использовать один из импульсных генераторов ORIENTAL MOTOR.
Одной из самых замечательных особенностей шаговых двигателей является их способность очень точного позиционирования. Это будет подробно рассмотрено позже. Шаговые двигатели не идеальны, всегда есть небольшие неточности. Стандартные шаговые двигатели ORIENTAL MOTOR имеют точность ± 3 угловых минуты (0,05°). Однако замечательной особенностью шаговых двигателей является то, что эта ошибка не накапливается от шага к шагу. Когда стандартный шаговый двигатель проходит один шаг, он будет двигаться на 1,8° ± 0,05°. Если тот же мотор пройдет миллион шагов, он пройдет 1 800 000° ± 0,05°. Ошибка не накапливается.
Шаговые двигатели могут быстро реагировать и ускоряться. У них низкая инерция ротора, поэтому они могут быстро набирать скорость. По этой причине шаговые двигатели идеально подходят для коротких и быстрых перемещений.
Система шагового двигателя
На приведенной ниже схеме показана типичная система на основе шагового двигателя. Все эти части должны присутствовать в той или иной форме.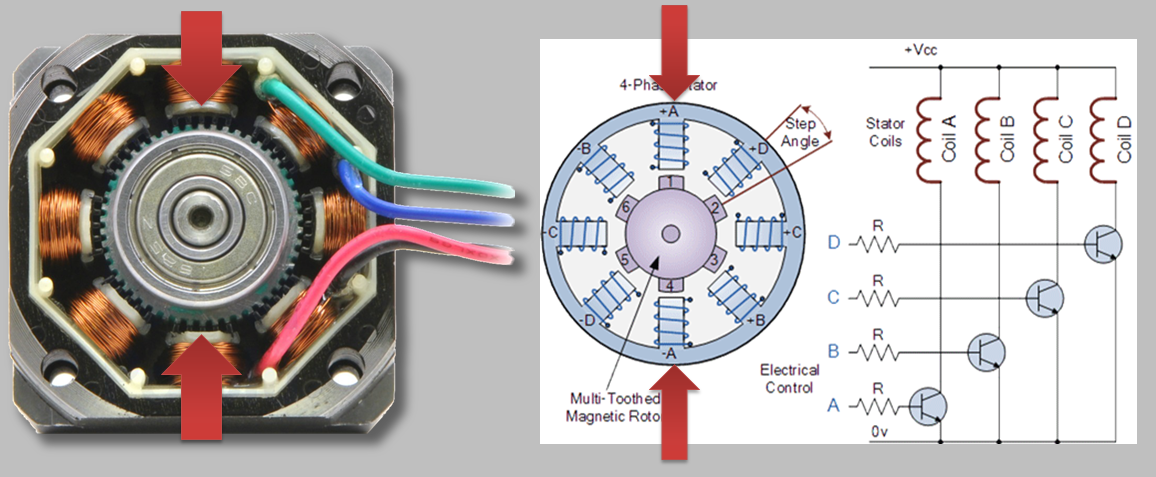 Производительность каждого компонента будет влиять на другие.
Производительность каждого компонента будет влиять на другие.
Первым компонентом является компьютер или ПЛК. Это мозг системы. Компьютер не только управляет системой шагового двигателя, но и остальной частью машины. Он может поднимать лифт или продвигать конвейер. Он может быть как сложным, как ПК или ПЛК, так и простым, как кнопка оператора.
Вторая часть — индексатор или карта ПЛК. Это говорит шаговому двигателю, что делать. Он выдаст правильное количество импульсов, которое двигатель будет перемещать, и изменяет частоту, чтобы двигатель ускорялся, работал на скорости, а затем замедлялся.
Это может быть отдельный компонент, например индексатор ORIENTAL MOTOR SG8030, или плата генератора импульсов, которая вставляется в ПЛК. Форма нематериальна, но она должна присутствовать, чтобы двигатель двигался.
Следующие четыре блока составляют драйвер двигателя. Логика фазового управления принимает импульсы от индексатора и определяет, какая фаза двигателя должна быть включена. Фазы должны быть под напряжением в определенной последовательности, и логика управления фазами позаботится об этом. Источник питания логики представляет собой низкоуровневый источник питания, который питает ИС в драйвере. Это зависит от набора микросхем или дизайна приложения, но большинство источников питания логики находятся в диапазоне 5 вольт. Источник питания двигателя — это напряжение питания для питания двигателя. Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности представляет собой набор транзисторов, который позволяет току питать фазы. Они постоянно включаются и выключаются, чтобы двигатель работал в правильной последовательности.
Фазы должны быть под напряжением в определенной последовательности, и логика управления фазами позаботится об этом. Источник питания логики представляет собой низкоуровневый источник питания, который питает ИС в драйвере. Это зависит от набора микросхем или дизайна приложения, но большинство источников питания логики находятся в диапазоне 5 вольт. Источник питания двигателя — это напряжение питания для питания двигателя. Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности представляет собой набор транзисторов, который позволяет току питать фазы. Они постоянно включаются и выключаются, чтобы двигатель работал в правильной последовательности.
Все эти компоненты дают команду двигателю перемещать нагрузку. Нагрузкой может быть ходовой винт, диск или конвейер.
Типы шаговых двигателей
В настоящее время существует три основных типа шаговых двигателей.
- Переменное сопротивление (VR)
- Постоянный магнит (ПМ)
- Гибрид
ORIENTAL MOTOR производит только гибридные шаговые двигатели.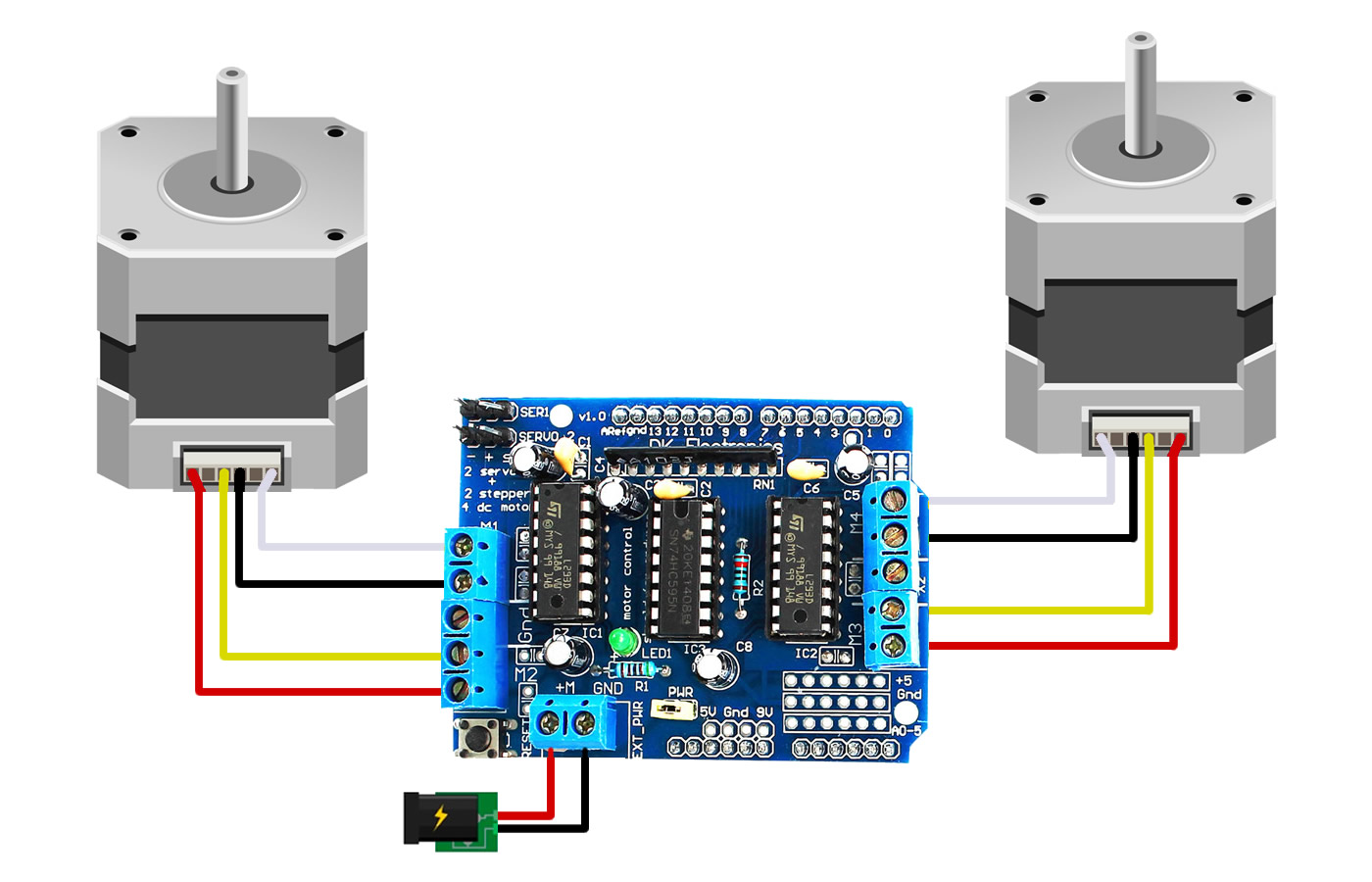
Шаговые двигатели с переменным сопротивлением имеют зубья на роторе и статоре, но не имеют магнита. Поэтому он не имеет фиксирующего момента. Постоянный магнит имеет магнит для ротора, но не имеет зубцов. Обычно магнит PM имеет грубые углы шага, но у него есть фиксирующий крутящий момент.
Гибридные шаговые двигатели сочетают в себе магнит от постоянного магнита и зубья от двигателей с переменным сопротивлением. Магнит намагничен в осевом направлении, что означает, что на диаграмме справа верхняя половина представляет собой северный полюс, а нижняя половина — южный полюс. На магните две зубчатые чашки ротора с 50 зубьями. Две чашки смещены на 3,6°, так что если мы посмотрим вниз на ротор между двумя зубцами на чашке северного полюса, мы увидим один зубец на чашке южного полюса прямо посередине.
Эти двигатели имеют двухфазную конструкцию с 4 полюсами на фазу. Полюса, отстоящие друг от друга на 90°, составляют каждую фазу. Каждая фаза намотана так, что полюса на 180° имеют одинаковую полярность, а полюса на 90° — противоположную полярность.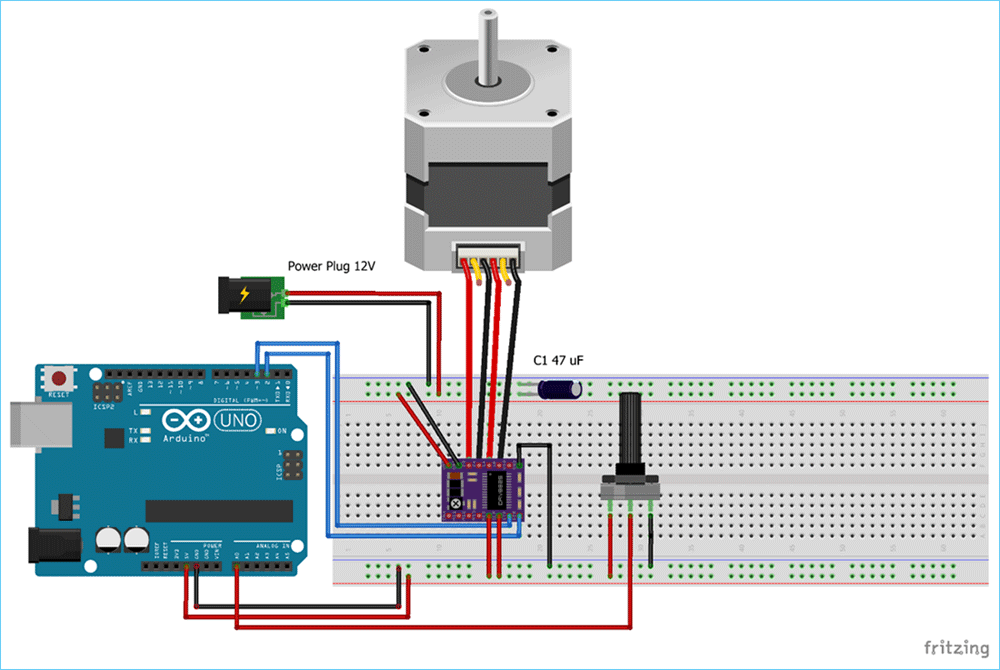 Если бы ток в этой фазе был изменен на противоположный, то изменилась бы и полярность. Это означает, что мы можем сделать любой полюс статора либо северным, либо южным полюсом.
Если бы ток в этой фазе был изменен на противоположный, то изменилась бы и полярность. Это означает, что мы можем сделать любой полюс статора либо северным, либо южным полюсом.
На роторе 50 зубьев. Шаг между зубьями составляет 7,2°. При движении двигателя некоторые зубья ротора смещаются с зубьями статора на 3/4 шага зубьев, 1/2 шага зубьев и 1/4 шага зубьев. Когда двигатель шагает, он выбирает самый простой маршрут, поскольку 1/4 от 7,2° составляет 1,8°, двигатель перемещается на 1,8° каждый шаг.
Наконец, крутящий момент и точность зависят от количества полюсов (зубьев). Чем больше полюсов, тем лучше крутящий момент и точность. ORIENTAL MOTOR предлагает шаговые двигатели высокого разрешения. Шаг зубьев этих двигателей вдвое меньше, чем у нашего стандартного двигателя. Ротор имеет 100 зубьев, поэтому угол между зубьями составляет 3,6°. Когда двигатель перемещается на 1/4 шага зуба, он перемещается на 0,9°. Разрешение наших моделей с высоким разрешением в два раза больше, чем у стандартных моделей: 400 шагов на оборот против 200 шагов на оборот.
Меньшие углы шага означают меньшую вибрацию, поскольку мы не делаем так далеко с каждым шагом.
Структура
На приведенном ниже рисунке показано поперечное сечение 5-фазного шагового двигателя. Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор, в свою очередь, состоит из трех компонентов: стакана ротора 1, стакана ротора 2 и постоянного магнита. Ротор намагничен в осевом направлении, так что, например, если чашка ротора 1 поляризована на север, чашка ротора 2 будет поляризована на юг.
Статор имеет 10 магнитных полюсов с маленькими зубьями, каждый полюс снабжен обмоткой.
Каждая обмотка соединена с обмоткой противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток проходит через пару обмоток. (Пропускание тока через данную обмотку намагничивает противоположную пару полюсов той же полярности, то есть северной или южной.)
Противоположная пара полюсов составляет одну фазу.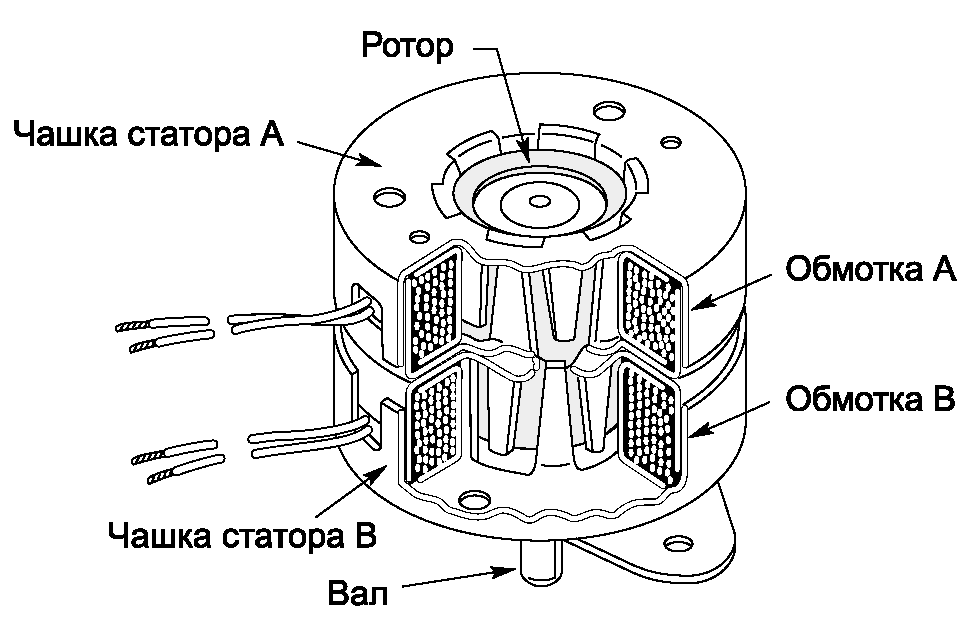 Поскольку имеется 10 магнитных полюсов, или пять фаз, в этом конкретном двигателе называется 5-фазным шаговым двигателем.
Поскольку имеется 10 магнитных полюсов, или пять фаз, в этом конкретном двигателе называется 5-фазным шаговым двигателем.
По внешнему периметру каждого ротора имеется 50 зубьев, при этом зубья чашки ротора 1 и чашки ротора 2 механически смещены друг относительно друга на половину шага зубьев.
Скорость-крутящий момент
Очень важно, чтобы вы знали, как читать кривую скорость-крутящий момент, поскольку она скажет нам, что двигатель может и чего не может делать. Кривые скорость-момент представляют данный двигатель и данный привод. Когда двигатель работает, его крутящий момент зависит от типа привода и напряжения. Один и тот же двигатель может иметь очень разную кривую скорости вращения при использовании с другим приводом.
ORIENTAL MOTOR приводит кривые скорость-момент для справки. Если двигатель используется с аналогичным приводом, с аналогичным напряжением и током, вы должны получить аналогичные характеристики. См. приведенную ниже интерактивную кривую скорость-момент:
Чтение кривой скорость-момент
- Удерживающий момент
Величина крутящего момента, создаваемого двигателем в состоянии покоя, когда через его обмотки протекает номинальный ток. - Пуск/Стоп Область
Значения, при которых двигатель может мгновенно запускаться, останавливаться или реверсировать. - Момент втягивания
Значения крутящего момента и скорости, которые двигатель может запускать, останавливать или реверсировать синхронно с входными импульсами. - Момент вытягивания
Значения крутящего момента и скорости, при которых двигатель может работать синхронно с входными фазами. Максимальные значения, которые двигатель может обеспечить без остановки. - Максимальная начальная скорость
Максимальная скорость, с которой двигатель может запуститься, измеренная без нагрузки. - Максимальная рабочая скорость
Максимальная скорость вращения двигателя, измеренная без нагрузки.
Для работы в зоне между втягивающим и вытягивании, двигатель должен сначала запуститься в зоне пуска/останова. Затем частота пульса увеличивается до тех пор, пока не будет достигнута желаемая скорость. Для остановки скорость двигателя снижается до тех пор, пока она не станет ниже кривой крутящего момента.
Затем частота пульса увеличивается до тех пор, пока не будет достигнута желаемая скорость. Для остановки скорость двигателя снижается до тех пор, пока она не станет ниже кривой крутящего момента.
Крутящий момент пропорционален току и количеству витков провода. Если мы хотим увеличить крутящий момент на 20%, мы должны увеличить ток примерно на 20%. Точно так же, если мы хотим уменьшить крутящий момент на 50%, уменьшим ток на 50%.
Из-за магнитного насыщения нет смысла увеличивать ток более чем в 2 раза от номинального. В этот момент увеличение тока не увеличит крутящий момент. При токе, примерно в 10 раз превышающем номинальный, вы рискуете размагнитить ротор.
Все наши двигатели имеют изоляцию класса B и могут выдерживать температуру 130°C до разрушения изоляции. Если мы допускаем разницу температур внутри и снаружи в 30°, температура корпуса не должна превышать 100°C.
Индуктивность влияет на крутящий момент на высоких скоростях. Индуктивность является причиной того, что двигатели не имеют высокой степени крутящего момента до бесконечности.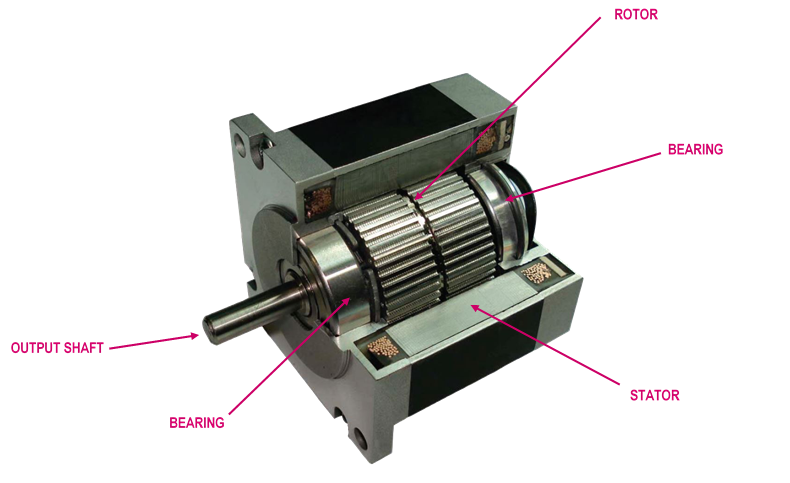 Каждая обмотка двигателя имеет определенное значение индуктивности и сопротивления. Индуктивность в генри, деленная на сопротивление в омах, дает нам значение секунд. Это количество секунд (постоянная времени) представляет собой количество времени, которое требуется катушке для зарядки до 63% от ее номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампер. После примерно 4 или 5 постоянных времени катушка будет до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
Каждая обмотка двигателя имеет определенное значение индуктивности и сопротивления. Индуктивность в генри, деленная на сопротивление в омах, дает нам значение секунд. Это количество секунд (постоянная времени) представляет собой количество времени, которое требуется катушке для зарядки до 63% от ее номинального значения. Если двигатель рассчитан на 1 ампер, через 1 постоянную времени катушка будет на 0,63 ампер. После примерно 4 или 5 постоянных времени катушка будет до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
На низких скоростях это не проблема. Ток может входить и выходить из катушек достаточно быстро, поэтому двигатель имеет номинальный крутящий момент. Однако на высоких скоростях ток не может пройти достаточно быстро, пока не переключится следующая фаза. Крутящий момент уменьшается.
Напряжение драйвера играет большую роль в быстродействии. Чем выше отношение напряжения привода к напряжению двигателя, тем лучше производительность на высоких скоростях. Высокие напряжения вызывают ток в обмотках с большей скоростью, чем 63%, упомянутые выше.
Чем выше отношение напряжения привода к напряжению двигателя, тем лучше производительность на высоких скоростях. Высокие напряжения вызывают ток в обмотках с большей скоростью, чем 63%, упомянутые выше.
Вибрация
Когда шаговый двигатель совершает переход от одного шага к другому, ротор не останавливается сразу. ротор фактически проходит конечное положение, оттягивается назад, проходит конечное положение в противоположном направлении и продолжает двигаться вперед и назад, пока, наконец, не остановится (см. интерактивную диаграмму ниже). Мы называем это «звоном», и он возникает при каждом шаге двигателя. Подобно шнуру для банджи, импульс переносит ротор за точку его остановки, затем он «подпрыгивает» вперед и назад, пока, наконец, не остановится. Однако в большинстве случаев двигатель получает команду перейти к следующему шагу, прежде чем он остановится.
На приведенных ниже графиках показан звон при различных условиях нагрузки. Без нагрузки двигатель сильно стучит. Много звонка означает много вибрации. Двигатель часто глохнет, если он не нагружен или слегка нагружен, потому что вибрация настолько высока, что теряется синхронность. При тестировании шагового двигателя обязательно добавляйте нагрузку.
Много звонка означает много вибрации. Двигатель часто глохнет, если он не нагружен или слегка нагружен, потому что вибрация настолько высока, что теряется синхронность. При тестировании шагового двигателя обязательно добавляйте нагрузку.
На двух других графиках показан двигатель с нагрузкой. Правильная загрузка двигателя сгладит его работу. Нагрузка должна составлять от 30% до 70% крутящего момента, который может создать двигатель, а отношение инерции нагрузки к инерции ротора должно составлять от 1:1 до 10:1. Для более коротких и быстрых движений соотношение должно быть ближе к 1:1–3:1.
Специалист по применению ORIENTAL MOTOR и инженеры могут помочь в выборе правильного размера.
Двигатель будет демонстрировать гораздо более сильные вибрации, если частота входных импульсов соответствует собственной частоте двигателя. Это называется резонансом и обычно происходит на частоте около 200 Гц. В резонансе превышение и недорегулирование становятся намного больше, и вероятность пропуска шагов намного выше. Резонанс меняется в зависимости от инерции нагрузки, но обычно он составляет около 200 Гц.
Резонанс меняется в зависимости от инерции нагрузки, но обычно он составляет около 200 Гц.
2-фазные шаговые двигатели могут пропускать шаги только группами по четыре. Если вы пропускаете шаги, кратные четырем, вибрация вызывает потерю синхронизма или нагрузка слишком велика. Если количество пропущенных шагов не кратно четырем, велика вероятность того, что проблемы вызваны неправильным количеством импульсов или электрическими помехами.
Есть несколько способов обойти резонанс. Самый простой способ — вообще избежать такой скорости. 200 Гц — это не очень быстро для двухфазного двигателя со скоростью 60 об/мин. Большинство двигателей имеют максимальную начальную скорость около 1000 импульсов в секунду или около того. Таким образом, в большинстве случаев вы можете запустить двигатель на более высокой скорости, чем резонансная скорость.
Если вам нужно начать со скорости ниже резонансной скорости, быстро ускорьтесь через резонансный диапазон.
Другим решением является уменьшение угла шага. Двигатель всегда будет промахиваться и промахиваться больше для больших углов шага. Если двигателю не нужно далеко перемещаться, он не создаст достаточной силы (крутящего момента), чтобы выйти за пределы допустимого диапазона. Каждый раз, когда угол шага уменьшается, мотор не будет так сильно вибрировать. Вот почему полушаговые и микрошаговые системы так эффективно снижают вибрацию.
Двигатель всегда будет промахиваться и промахиваться больше для больших углов шага. Если двигателю не нужно далеко перемещаться, он не создаст достаточной силы (крутящего момента), чтобы выйти за пределы допустимого диапазона. Каждый раз, когда угол шага уменьшается, мотор не будет так сильно вибрировать. Вот почему полушаговые и микрошаговые системы так эффективно снижают вибрацию.
Убедитесь, что мощность двигателя соответствует нагрузке. Выбрав правильный двигатель, вы можете улучшить производительность.
Также доступны демпферы. Демпферы устанавливаются на задний вал двигателя и поглощают часть энергии вибрации. Они часто сглаживают вибрирующий двигатель недорого.
5-фазные шаговые двигатели
Пятифазные шаговые двигатели являются относительно новой технологией. Наиболее очевидная разница между 2-фазным и 5-фазным (см. интерактивную схему ниже) заключается в количестве полюсов статора. В то время как двухфазные двигатели имеют 8 полюсов, по 4 на фазу, пятифазный двигатель имеет 10 полюсов, по 2 на фазу.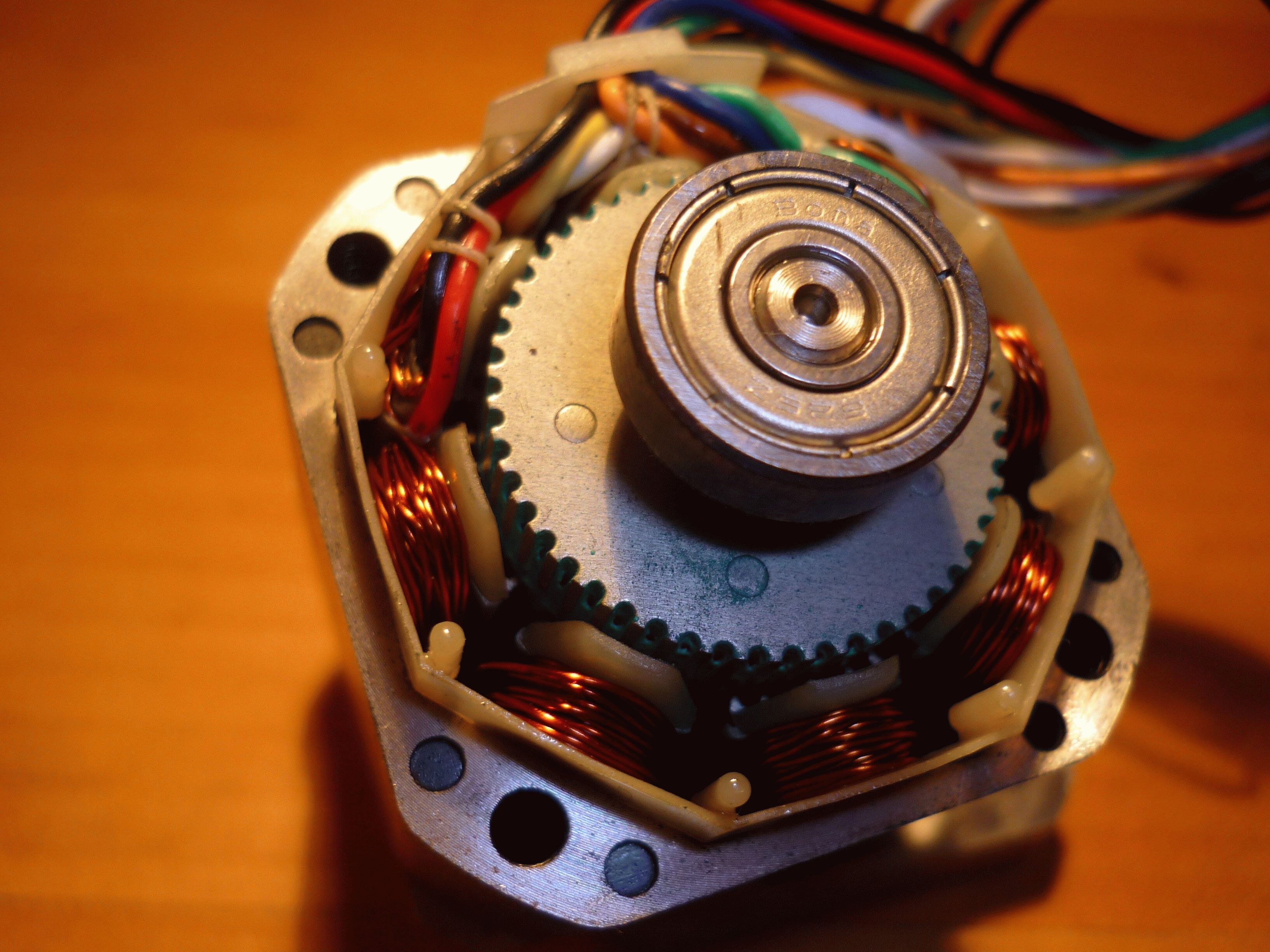 Ротор такой же, как у двухфазного двигателя.
Ротор такой же, как у двухфазного двигателя.
В то время как двухфазный двигатель перемещается на 1/4 шага зубьев каждую фазу. 5-фазный из-за своей конструкции перемещается на 1/10 шага зуба. Поскольку шаг по-прежнему составляет 7,2°, угол шага равен 0,72°. Просто исходя из конструкции, разрешение 5-фазного датчика составляет 500 шагов на оборот, а двухфазного — 200 шагов на оборот. Пятифазный предлагает разрешение в 2,5 раза лучше, чем двухфазный.
При более высоком разрешении вы получаете меньший угол шага, что, в свою очередь, снижает вибрацию. Поскольку угол шага у 5-фазного в 2,5 раза меньше, чем у 2-фазного, звон, вибрации значительно ниже. Как в 2-фазном, так и в 5-фазном режиме ротор должен промахиваться или опускаться более чем на 3,6°, чтобы пропускать шаги. Поскольку угол шага 5-фазного двигателя составляет всего 0,72°, для двигателя почти невозможно превышение или недорегулирование на 3,6°. Вероятность потери синхронизма с 5-фазным шаговым двигателем очень мала.
Методы привода
Существует четыре различных метода привода шаговых двигателей:
- Волновой привод (полный шаг)
- 2 фазы включены (полный шаг)
- 1-2 фазы включены (половина шага)
- Микрошаг
Волновой привод
На приведенной ниже диаграмме метод волнового привода упрощен для лучшей иллюстрации теории. На иллюстрации каждый поворот на 90° соответствует 1,8° поворота ротора в реальном двигателе.
В методе волнового привода (также называемом методом однофазного включения) одновременно включается только одна фаза. Когда мы запитываем фазу А от южного полюса, она притягивает северный полюс ротора. Выключаем А и включаем В, ротор поворачивается на 90° (1,8°) и так далее. Каждый раз подается питание только на одну фазу.
Волновой привод имеет четырехступенчатую электрическую последовательность вращения двигателя.
2 фазы включены
В методе «2 фазы включены» две фазы всегда находятся под напряжением.
Еще раз на приведенном ниже рисунке каждые 90° представляют собой поворот на 1,8°. Если обе фазы A и B запитаны как южные полюса, северный полюс ротора будет одинаково притягиваться к обоим полюсам и выстраиваться прямо посередине. По мере того, как на фазы подается питание, ротор будет вращаться, чтобы выровняться между двумя полюсами, находящимися под напряжением.
Метод «двухфазного включения» включает четырехэтапную электрическую последовательность вращения двигателя.
Стандартные 2-фазные и 2-фазные двигатели типа M компании ORIENTAL MOTOR используют метод «двухфазного включения».
Какие преимущества имеет метод «2 фазы» по сравнению с методом «1 фаза»? Ответ — крутящий момент. В методе «1 фаза включена» одновременно включается только одна фаза, поэтому мы имеем одну единицу крутящего момента, действующую на ротор. В методе «2 фазы включены» у нас есть две единицы крутящего момента, действующие на ротор: 1 в положении на 12 часов и 1 в положении на 3 часа. Если мы сложим эти два вектора крутящего момента вместе, мы получим результат под углом 45°, а величина увеличится на 41,4%. Используя метод «2 фазы вкл.», мы можем получить тот же угол шага, что и метод «1 фаза вкл.», но с крутящим моментом на 41% больше.
Если мы сложим эти два вектора крутящего момента вместе, мы получим результат под углом 45°, а величина увеличится на 41,4%. Используя метод «2 фазы вкл.», мы можем получить тот же угол шага, что и метод «1 фаза вкл.», но с крутящим моментом на 41% больше.
Пятифазные двигатели немного отличаются. Вместо того, чтобы использовать метод «две фазы», мы используем метод «четыре фазы». Каждый раз мы включаем 4 фазы и мотор делает шаг.
Пятифазный двигатель проходит 10-ступенчатую электрическую последовательность.
1-2 фазы включены (полушаг)
Метод «1-2 фазы включен» или полушаг объединяет два предыдущих метода. В этом случае мы запитываем фазу А. Ротор выровняется. В этот момент мы держим фазу А включенной и активируем фазу В. Теперь ротор одинаково притягивается к обеим линиям вверх посередине. Ротор повернулся на 45° (0,9°). Теперь отключаем фазу А, но оставляем включенной фазу В. Мотор делает еще один шаг. И так далее и тому подобное.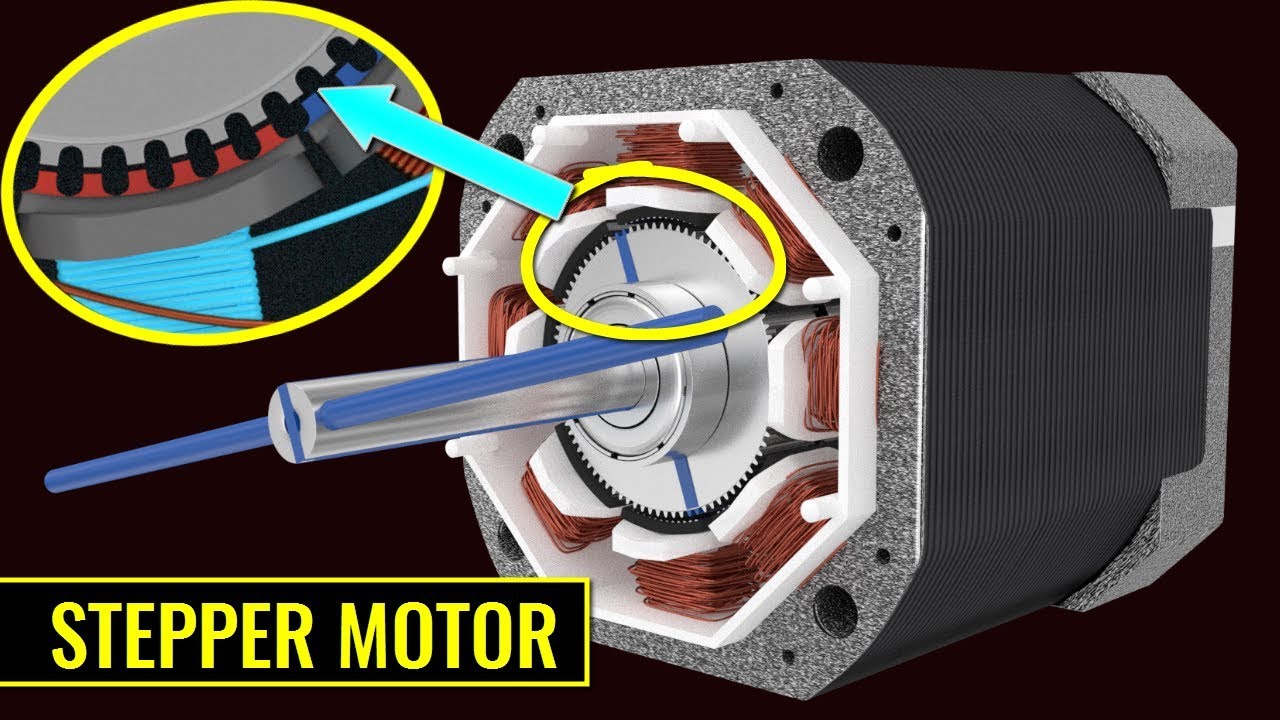 Чередуя одну фазу и две фазы, мы сократили угол шага вдвое. Помните, что при меньшем угле шага уменьшается вибрация.
Чередуя одну фазу и две фазы, мы сократили угол шага вдвое. Помните, что при меньшем угле шага уменьшается вибрация.
(Для 5-фазного двигателя мы чередуем 4 фазы и 5 фаз.)
Полушаговый режим имеет восьмиступенчатую электрическую последовательность. Для пятифазного двигателя в методе «4-5 фаз включено» двигатель проходит 20-ступенчатую электрическую последовательность.
Микрошаг
Микрошаг — это способ сделать маленькие шаги еще меньше. Чем меньше шаг, тем выше разрешение и лучше характеристики вибрации. В микрошаге фаза не полностью включена или полностью выключена. Он частично включен. Синусоидальные волны применяются как к фазе A, так и к фазе B, на расстоянии 90° друг от друга (0,9° в пятифазном шаговом двигателе).
Когда максимальная мощность находится в фазе A, фаза B равна нулю. Ротор выровняется с фазой A. По мере того, как ток в фазе A уменьшается, он увеличивается в фазе B. Ротор будет делать крошечные шаги к фазе B, пока фаза B не достигнет своего максимума, а фаза A не станет нулевой. Процесс продолжается вокруг других фаз, и у нас есть микрошаг.
Процесс продолжается вокруг других фаз, и у нас есть микрошаг.
Есть некоторые проблемы, связанные с микрошагом, в основном с точностью и крутящим моментом. Поскольку фазы являются только фазами, только частично запитаны, крутящий момент двигателя снижается, как правило, примерно на 30%. Кроме того, из-за того, что разница крутящего момента между ступенями настолько мала, двигатель иногда не может справиться с нагрузкой. В таких случаях двигателю можно дать команду двигаться на 10 шагов, прежде чем он действительно начнет движение. Во многих случаях необходимо замкнуть цикл с помощью энкодеров, которые увеличивают цену.
Системы шаговых двигателей
- Системы с открытым контуром
- Системы с замкнутым контуром
- Сервосистемы
Разомкнутый контур
Шаговые двигатели спроектированы как система разомкнутого контура. Генератор импульсов посылает импульсы в схему чередования фаз. Секвенсор фаз определяет, какие фазы необходимо отключить или включить, как описано в информации о полном шаге и полушаге. Секвенсор управляет полевыми транзисторами большой мощности, которые затем вращают двигатель.
Секвенсор управляет полевыми транзисторами большой мощности, которые затем вращают двигатель.
Однако в системе с разомкнутым контуром нет проверки положения и невозможно узнать, выполнил ли двигатель заданное движение.
Замкнутый контур
Самый популярный метод замыкания контура — установка энкодера на задний вал двухвального двигателя. Кодер представляет собой тонкий диск с линиями на нем. Диск проходит между передатчиком и приемником. Каждый раз, когда между ними появляется линия, на сигнальные линии выводится импульс. Эти импульсы возвращаются на контроллер, который ведет их подсчет. Обычно в конце перемещения контроллер сравнивает количество импульсов, отправленных водителю, с количеством импульсов, отправленных энкодером обратно. Обычно записывается процедура, согласно которой, если два числа различны, разница затем компенсируется. Если числа совпадают, ошибки не произошло и движение продолжается.
Этот метод имеет два недостатка: стоимость (и сложность) и отклик. Дополнительная стоимость энкодера, наряду с увеличением сложности контроллера, увеличивает стоимость системы. Кроме того, поскольку исправление (если оно есть) выполняется в конце хода, в систему может быть добавлено дополнительное время.
Дополнительная стоимость энкодера, наряду с увеличением сложности контроллера, увеличивает стоимость системы. Кроме того, поскольку исправление (если оно есть) выполняется в конце хода, в систему может быть добавлено дополнительное время.
Сервосистема
Другим вариантом является сервосистема. Сервосистема, как правило, представляет собой двигатель с малым числом полюсов, обеспечивающий высокую скорость, но не имеющий встроенной функции позиционирования. Чтобы сделать его устройством положения, требуется обратная связь, обычно и энкодер или резольвер, и контуры управления. Сервопривод по существу включается и выключается, пока счетчик резольвера не достигнет определенной точки. Следовательно, сервопривод работает на основе ошибки. Например, сервопривод получает команду двигаться на 100 оборотов. Счетчик резольвера показывает ноль, и двигатель включается. Когда счетчик резольвера достигает 100 оборотов, двигатель выключается. Если положение отклоняется, двигатель снова включается, чтобы вернуть его в исходное положение. Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если настройка усиления высока, двигатель будет очень быстро реагировать на любые изменения ошибки. Если настройка коэффициента усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Задействованы любые настройки усиления по времени, временные задержки вводятся в систему управления движением.
Как сервопривод реагирует на ошибку, зависит от настройки усиления. Если настройка усиления высока, двигатель будет очень быстро реагировать на любые изменения ошибки. Если настройка коэффициента усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Задействованы любые настройки усиления по времени, временные задержки вводятся в систему управления движением.
AlphaStep Системы шаговых двигателей с замкнутым контуром
AlphaStep — революционный шаговый двигатель компании Oriental Motor. AlphaStep имеет встроенный резольвер, обеспечивающий обратную связь по положению. В любой момент времени мы знаем, где находится ротор.
Драйвер AlphaStep имеет входной счетчик. Подсчитываются все импульсы, поступающие на привод. Обратная связь резольвера поступает на счетчик положения ротора. Любое отклонение присутствует в счетчике отклонений. Обычно двигатель работает в разомкнутом контуре. Мы делаем векторы крутящего момента, и двигатель следует за ними. Если счетчик отклонения показывает что-то большее, чем ± 1,8°, то фазовращатель включает вектор крутящего момента в верхней части кривой смещения крутящего момента, генерируя максимальный крутящий момент, чтобы вернуть ротор в синхронное состояние. Если двигатель отключен на несколько ступеней, секвенсор активирует несколько векторов крутящего момента в верхней части кривой смещения крутящего момента. Водитель выдерживает перегрузку до 5 секунд. Если он не может вернуть двигатель в синхронизм в течение 5 секунд, водитель выдаст ошибку и отправит сигнал тревоги.
Если счетчик отклонения показывает что-то большее, чем ± 1,8°, то фазовращатель включает вектор крутящего момента в верхней части кривой смещения крутящего момента, генерируя максимальный крутящий момент, чтобы вернуть ротор в синхронное состояние. Если двигатель отключен на несколько ступеней, секвенсор активирует несколько векторов крутящего момента в верхней части кривой смещения крутящего момента. Водитель выдерживает перегрузку до 5 секунд. Если он не может вернуть двигатель в синхронизм в течение 5 секунд, водитель выдаст ошибку и отправит сигнал тревоги.
Отличительной особенностью AlphaStep является то, что он корректирует пропущенные шаги на лету. Он не ждет до конца движения, чтобы внести исправления. Как только ротор возвращается в пределах 1,8 °, драйвер возвращается в режим разомкнутого контура и посылает правильные фазы питания.
На приведенном ниже графике показана кривая смещения крутящего момента, когда агрегат находится в режиме разомкнутого или замкнутого контура. Кривая смещения крутящего момента представляет собой крутящий момент, создаваемый одной фазой. Он создает максимальный крутящий момент, когда зубья ротора смещены на 1,8°. Двигатель может пропустить шаг только в том случае, если он промахивается более чем на 3,6°. Поскольку водитель берет на себя управление вектором крутящего момента, когда он отклоняется на 1,8°, двигатель не может пропускать шаги, за исключением случаев, когда он перегружен более чем на 5 секунд.
Кривая смещения крутящего момента представляет собой крутящий момент, создаваемый одной фазой. Он создает максимальный крутящий момент, когда зубья ротора смещены на 1,8°. Двигатель может пропустить шаг только в том случае, если он промахивается более чем на 3,6°. Поскольку водитель берет на себя управление вектором крутящего момента, когда он отклоняется на 1,8°, двигатель не может пропускать шаги, за исключением случаев, когда он перегружен более чем на 5 секунд.
Многие думают, что точность шага AlphaStep составляет ± 1,8°. Точность шага AlphaStep составляет 5 угловых минут (0,083°). Водитель управляет векторами крутящего момента за пределами 1,8°. Оказавшись внутри 1,8°, зубья ротора выровняются с вектором создаваемого крутящего момента. AlphaStep следит за тем, чтобы правильный зуб совпадал с вектором крутящего момента.
AlphaStep доступен во многих версиях. ORIENTAL MOTOR предлагает версии с круглым валом и редуктором с несколькими передаточными числами для увеличения разрешения и крутящего момента или для уменьшения отраженной инерции.