Шаговые двигатели: описание, примеры, обзоры, характеристики
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования NEMA по посадочным размерам и размеру фланца. Самые ходовые типоразмеры это NEMA 17 с фланцем 42*42мм, NEMA 23 с фланцем 57*57мм и NEMA 34 размером 86*86мм соответственно. Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Как устроен шаговый двигатель
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.

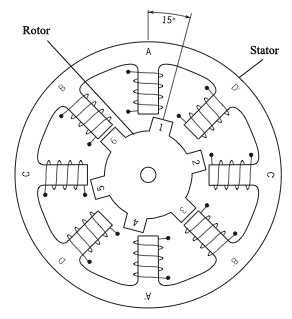
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.

Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Статор имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах. Двигатель на рисунке имеет величину шага 30 град, так же, как и предыдущий. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
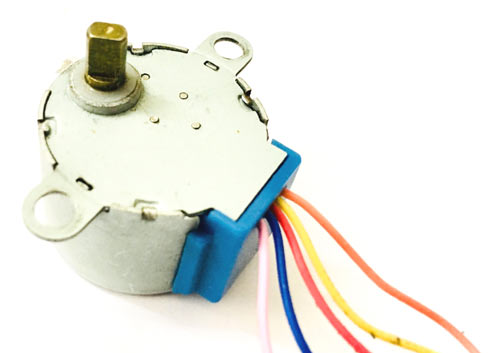
На практике двигатель с постоянными магнитами выглядит, например, вот так. Увидеть такой двигатель можно в лазерном принтере.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Это значит, что при свободном выбеге на больших оборотах двигатель сработает как генератор и может сжечь драйвер током, который сам и сгенерирует. Это же относится и к гибридным двигателям.

Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Выглядит гибридный двигатель, например, вот так.

Большинство современных шаговых двигателей являются именно гибридными, поэтому давайте подробней рассмотрим устройство шаговых двигателей этого типа.

Ротор двигателя разделен поперек на две части, между которыми расположен цилиндрический постоянным магнит. Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.

Посмотрим на продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев, что очень хорошо было видно на предыдущем фото. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому она не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая, около 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его служба может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.

Мы рассмотрели устройство самого «железа» шаговых двигателей, но помимо этого двигатели можно еще поделить по количеству и способу коммутации их обмоток.
Тут всего два основных вида – биполярный и униполярный

Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой или полумостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Примером распространенного биполярного двигателя может быть шаговый двигатель марки 17HS4401

Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.

Примером распространенного униполярного двигателя с пятью выводами может быть шаговый двигатель марки 28BYJ-48. Данный двигатель можно переделать в биполярный, разделив выводы AB и CD, для чего достаточно перерезать одну из перемычек на плате под синей крышкой.

Иногда двигатели имеют 4 раздельные обмотки, по этой причине их ошибочно называют 4-х фазными или четырехобмоточными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать и как униполярный, и как биполярный.

Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность, а значит при одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путей для повышения магнитного поля два – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника, однако на практике гораздо более существенным является ограничение по нагреву двигателя в следствии потерь из-за омического сопротивления обмоток. Тут и проявляется преимущество конструкции биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток, а другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра или увеличивать габариты двигателя. В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
На практике можно встретить оба типа двигателей, так как биполярные дешевле из-за меньшей материалоемкости, а униполярные требуют значительно более простых драйверов. В настоящее время наиболее широко распространены гибридные биполярные двигатели.
Где приобрести ШД? Вы можете купить шаговые двигатели в нашем магазине 3DIY с доставкой по всей России!
Управление шаговым двигателем

Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
-
полношаговое
-
полушаговое
-
микрошаговое
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе. Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Где приобрести драйвера ШД? Купить драйвера шаговых двигателей можно у нас в онлайн магазине с доставкой!
Конструктивные исполнения ШД
Обычный шаговый двигатель
Тут нет никаких изысков – корпус, вал, в общем стандарт. Широко распространен в разном оборудовании, начиная от фрезеров и 3д принтеров, заканчивая приводом заслонки или мешалки.
Двигатель с полым валом

Шаговые двигатели с полым валом применяются когда существует необходимость передачи крутящего момента без применения соединительных муфт, например для использования в ограниченном пространстве. Так же сквозь него можно продеть длинный вал, который будет торчать с двух сторон и синхронно крутить что-то с одной и с другой стороны.
Двигатель со встроенной в вал приводной гайкой

Такой вид двигателя может найти применение в том случае, если требуется быстрое перемещение на большое расстояние. Длинный винт на высоких оборотах ведет себя подобно скакалке, а при использовании такого мотора винт можно неподвижно натянуть между опорами, а сам мотор закрепить на подвижной части оборудования. Тогда длина и нежесткость винта не будет влиять на максимальную скорость.
Двигатель с двойным валом

В этом исполнении двигатель имеет удлиненный вал, длинный конец которого выступает со стороны задней крышки. На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
Двигатель с винтом вместо вала

Находят себе применение например в 3д принтерах или в любом другом месте, где хочется сэкономить место не только на муфте между валом и винтом, но и на подшипниковой опоре винта, роль которой в данном случае выполняют подшипники двигателя.
Двигатель со встроенным тормозом

Позволяет зафиксировать вал в нужной позиции дополнительно к удержанию самим шаговиком. Так же позволяет удерживать вал в случае отключения питания двигателя.
Двигатель с редуктором

Редуктор позволяет понизить обороты двигателя и поднять его крутящий момент. Данное исполнение редко встречается в связи с тем, что шаговые двигатели и так имеют значительный момент на низких оборотах и сами по себе могут достигать весьма низких скоростей вращения.
Двигатель с энкодером

Он же сервошаговый двигатель. Фактически это сервопривод на шаговом двигателе. На удлиненный вал со стороны задней крышки монтируется энкодер в корпусе и благодаря этому мы получаем обратную связь о положении вала двигателя. В случае пропуска шагов двигателем контроллер узнает об этом и ориентируясь на показания энкодера будет подавать дополнительные импульсы до тех пор, пока вал не займет нужное положение. Сервошаговый двигатель используется со своим специальным драйвером, который имеет вход для подключения энкодера.
Преимущества шагового двигателя
- угол поворота ротора определяется числом поданных импульсов. Шаговый двигатель крутится не плавно, а шагами, шаг имеет определенную величину. Поэтому чтобы повернуть вал в нужное положение мы просто подаем известное нам количество импульсов.
- зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи. Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
- двигатель обеспечивает полный момент в режиме остановки. Это хорошо тем, что для фиксации положения вала запитанному двигателю не нужен тормоз, можно тормозить его при помощи драйвера.
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу, так как на один оборот двигателя приходится неизменное количество шагов, совершив которые мы всегда получим поворот на 360 градусов.
- высокая надежность. Высокая надежность двигателя связанна с отсутствием щеток. Срок службы фактически определяется сроком службы подшипников
- возможность получения низких скоростей вращения. Для получения низкой скорости вращения двигателя достаточно замедлить скорость подачи импульсов, тогда двигатель будет медленнее шагать и скорость его вращения будет небольшой.
- большой крутящий момент на низких скоростях. Большой крутящий момент на низких оборотах позволяет отказаться от применения редуктора, что упрощает конструкцию оборудования
- может быть перекрыт довольно большой диапазон скоростей. Скорость вращения двигателя пропорциональна частоте входных импульсов, подавая их быстрее или медленнее мы так же влияем и на скорость вращения.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.
- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
Как выбрать шаговый двигатель? На какие параметры обратить внимание.

- вида двигателя (его размеры)
- тока фазы
- индуктивность
Что касается вида двигателя, то при отсутствии каких-то определенных предпочтений мы бы рекомендовали использовать биполярные шаговые двигатели с 4 выводами, так как они наиболее распространены и, что не менее важно, не менее распространены драйвера для них. То есть случае какой-либо поломки вы легко найдете замену и отремонтируете станок.
Размер двигателя и его ток проще всего подобрать, ориентируясь на готовые станки от известных производителей, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом и можно взять их характеристики за основу. Производитель двигателя в данном случае не особо важен, так как ввиду отработанной технологии производства их характеристики у разных производителей примерно одинаковые.
Остается одна характеристика – индуктивность.
При одинаковом напряжении питания двигатели с большей индуктивностью имеют больший момент на низких оборотах, и меньший – на высоких, как видно из графика. Но большая индуктивность потенциально дает вам возможность получить больший крутящий момент, повысив напряжение питания, тогда как при использовании двигателей с небольшой индуктивностью повышение напряжения может привести к тому, что двигатель будет перегреваться без заметной прибавки в характеристиках. Это связано с тем, что нарастание тока в обмотках с низкой индуктивностью идет быстрее и мы легко можем получить среднее значение тока выше номинального, а как следствие этого – перегрев. Таким образом при прочих равных лучше выбрать двигатель с большим значением индуктивности.
Шаговый двигатель принцип работы
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Описание и принцип работы
Как и двигатель постоянного тока, описанный в предыдущей статье, шаговые двигатели также являются электромеханическими исполнительными механизмами, которые преобразуют импульсный цифровой входной сигнал в дискретный (инкрементальный) механический ход, широко используются в промышленных системах управления. Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.
Как следует из названия, шаговый двигатель не вращается непрерывно, как обычный двигатель постоянного тока, а движется дискретными «шагами» или «приращениями», причем угол каждого вращательного движения или шага зависит от числа полюсов статора и ротора. зубья имеет шаговый мотор.
Из-за их дискретной шаговой операции шаговые двигатели могут легко вращаться за конечную долю оборота за раз, например, 1,8, 3,6, 7,5 градусов и т.д. Так, например, давайте предположим, что шаговый двигатель совершает один полный оборот 360° ровно за 100 шагов.
Тогда угол шага для двигателя задается как 360°/ 100 шагов = 3,6°за шаг. Это значение обычно известно как Шаг угла.
Существует три основных типа шагового двигателя: переменное сопротивление, постоянный магнит и гибрид (своего рода комбинация обоих). Шаговый двигатель особенно хорошо подходит для устройств, требующих точного позиционирования и повторяемость с быстрой реакцией на запуск, остановка, реверс и регулировка скорости и другой ключевой особенностью шагового двигателя является его способность удерживать заряд ровно после достижения требуемого положения.
Как правило, шаговые двигатели имеют внутренний ротор с большим количеством «зубьев» постоянного магнита с рядом электромагнитных «зубьев», установленных на статоре. Электромагниты статоров поляризованы и деполяризованы последовательно, заставляя ротор вращаться по одному «шагу» за раз.
Современные многополюсные, многозубые шаговые двигатели имеют погрешность менее 0,9°на шаг (400 импульсов на оборот) и в основном используются для высокоточных систем позиционирования, подобных тем, которые используются для магнитных головок в дисководе гибких дисков / жестких дисках, принтеры / плоттеры или роботизированные устройства. Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360°/ (50 × 4)).
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Смотрите также: Правила рациональных покупок: как не тратить лишних денег в супермаркете
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Разновидности приспособления
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5°. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно. Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.
На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5°.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
- Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
- Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
Другие типы устройств
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1°, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина «частота вращения» в специализированной литературе нередко можно встретить определение «шаговая частота вращения». Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
При этом важно понимать, что шаговая частота вращения реального числа оборотов ротора двигателя ни в коем случае не отражает. Специалисты считают, что нет никакой причины не использовать в описании шаговых двигателей все то же количество оборотов в минуту, которое применяется при описании технических характеристик обычных электродвигателей.
Соотношение между реальной частотой вращения и ее шаговым аналогом вычисляется по следующей формуле:
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
Быстрые движения под высоким напряжением, или почти вся правда об управлении шаговым мотором
Доброго вам времени суток, уважаемые гики и сочувствующие!
В этой публикации я хочу поделиться своим опытом управления. Точнее – управления шагами. А уж если быть совсем точным, речь пойдёт об управлении замечательным устройством – шаговым электродвигателем.
Что же такое этот самый шаговый электродвигатель? В принципе, в плане функциональности этот мотор можно представить как обычный электромотор, каждый оборот вала которого разбит на множество одинаковых, точно фиксированных шагов. Перемещением на определённое количество шагов мы можем позиционировать вал шагового мотора с высокой точностью и хорошей повторяемостью. Каждый шаг можно разбить на множество ступенек (так называемый микростеппинг), что увеличивает плавность хода мотора, способствует подавлению резонансов, а также увеличивает угловое разрешение. Различия между полношаговым режимом (слева), 1/2 микростеппингом (в центре) и 1/16 микростеппингом (справа) видны невооружённым глазом:
К сожалению, все вышеупомянутые преимущества достигаются ценой значительной сложности системы управления шаговым мотором (для простоты будем называть эту систему драйвером).
Теперь рассмотрим схему работы типичного шагового мотора:
Из этой картинки видно, что шаговый мотор в электрическом плане представляет собой два или более электромагнита, которые необходимо переключать в определённой последовательности для приведения ротора в движение.
Лирическое отступление: На настоящий момент существуют два основных типа шаговых моторов: униполярный и биполярный. Поскольку униполярные моторы имеют меньший крутящий момент и худшие скоростные характеристики, в данной публикации они рассматриваться не будут.
Итак, вернёмся к управлению биполярным мотором. Как это ни парадоксально звучит, но зачастую проще обсуждать общие принципы на конкретных примерах. В качестве примера мы возьмём шаговый мотор ST4118L1804-A производителя Nanotec. Почему именно этот мотор и производитель? Причина проста: по основным характеристикам это типичный представитель моторов типоразмера NEMA 17, широко применяющихся в радиолюбительской практике, и имеет к тому же довольно подробную техдокументацию (которая начисто отсутствует у китайских noname-моторов).
Основные характеристики данного мотора:
Рабочее напряжение 3,15 В
Рабочий ток 1,8 А
Активное сопротивление обмотки 1,75 Ом
Индуктивность обмотки 3,3 мГн
Момент удержания 0,5 Нм
Угловой размер шага 1,8° (200 шагов на один оборот ротора)
В данном случае самое главное — это правильная интерпретация данных. Применив закон Ома, выясняем, что производитель указал рабочий ток и напряжение для постоянного тока, протекающего через обмотки двигателя, без учёта индуктивности.
Проверка: I = U/R, или 1,8 А = 3,15 В/1,75 Ом. Всё сходится.
Какой же будет мощность рассеяния при питании обмоток постоянным током?
Всё просто: P=I x U, или 1,8 А х 3,15 В = 5,67 Вт. В полушаговом режиме возможна ситуация, когда ток течёт через обе обмотки мотора, соответственно рассеиваемую мощность нужно удвоить: 5,67 Вт х 2 = 11,34 Вт. Это достаточно много, и может привести к перегреву мотора. Эта же величина является минимальной мощностью блока питания для этого мотора. Обыкновенный 3D принтер имеет пять подобных моторов, соответственно для питания драйверов необходим источник питания с минимальной мощностью 11,34 Вт х 5 = 56,7 Вт. К этой цифре необходимо добавить электрическую мощность, превращённую мотором в кинетическую или потенциальную энергию при работе принтера. Точный расчёт этой мощности — дело достаточно сложное, на практике проще всего добавить 75% к рассчитанной тепловой мощности и на том завершить расчёты. Почему именно 75%? Дело в том, что обычный шаговый мотор способен совершить полезную работу на величину примерно 2/3 от максимальной тепловой мощности. В данном случае для создания какого-либо узла или устройства сначала подбирается подходящий мотор (например, по крутящему моменту), а после этого рассчитывается мощность блока питания.
Итоговая мощность блока питания для пяти шаговых моторов: 56,7 Вт х 1,75 = 99,225 Вт.
Конечно, на практике ни в одном любительском устройстве не используются моторы под максимальной нагрузкой, и реальная мощность потребления будет, скорее всего, намного ниже расчётной. Я же, как человек ленивый и скаредный, крайне не люблю делать одно и то же два раза, поэтому беру блок питания всегда с некоторым запасом (то есть, согласно вышеприведённым расчётам).
Теперь пришла пора приступить к определению минимально необходимого напряжения блока питания. К сожалению, этому параметру уделяется незаслуженно маленькое внимание в тематических публикациях. Почему этот параметр так важен? Дело в том, что при вращении ротора шагового мотора через катушки течёт переменный ток, ограниченный не только активным, но также и индуктивным сопротивлением обмоток.
Рассмотрим предоставленный производителем график зависимости крутящего момента нашего мотора от частоты вращения:
На графике присутствуют две линии, показывающие зависимость крутящего момента от частоты вращения для напряжения питания 24 В (красная линия) и 48 В (зелёная линия). Нетрудно заметить, что спад крутящего момента начинается примерно с 300 об/мин для 24 В и примерно с 600-700 об/мин для напряжения 48 В. При этом необходимо упомянуть, что производитель использует недоступные любителям дорогостоящие промышленные драйверы. Почему же так важно напряжение питания драйвера, если оно даже в случае питания от 12 В заведомо выше паспортной величины напряжения питания шагового мотора (3,15 В)? Дело в том, что шаговый мотор управляется током, а не напряжением, и именно источниками тока являются все современные драйверы. В идеальном случае драйвер обеспечивает заданный ток в обмотках двигателя вне зависимости от частоты вращения ротора, нагрузки, изменения температуры и других параметров. Это организовано за счёт работы ШИМ-регулятора, управляемого зачастую довольно сложными алгоритмами. Из технической документации нашего мотора видно, что для полного оборота ротору необходимо совершить 200 шагов, при 300 об/мин это составит 60 000 шагов в минуту, или 1000 шагов в секунду. Это, проще говоря, соответствует переменному току частотой 1 кГц. На этой частоте индуктивное сопротивление обмотки составит (R(L)=2π×F×L): 2π х 1 кГц х 3,3 мГн = 20,73 Ом. Какое же напряжение необходимо для обеспеченияя тока в 1,8 А при этом сопротивлении? Закон Ома не дремлет (U=IR): 1,8 А х 20,73 Ом = 37,31 В. Неудивительно, что выше частоты вращения 300 об/мин наблюдается спад крутящего момента: драйверу банально не хватает напряжения питания. Почему же при таком вопиющем недостатке питания (37 — 24 =13 В) спад не наступает при более низкой частоте вращения? Дело в том, что в современных драйверах используется мостовая схема выходных каскадов, что позволяет «удваивать» напряжение, прикладываемое к обмоткам мотора. То есть, теоретически драйвер способен приложить «виртуальные» 48 В к обмоткам при напряжении питания 24 В, что создаёт теоретический запас по напряжению 48 — 37 = 11 В. На практике же этот запас будет нивелирован потерями в драйвере, сопутствующих цепях и активным сопротивлением обмоток мотора (активное сопротивление обмоток присутствует постоянно, и даже несколько возрастает при нагреве мотора). При увеличении частоты вращения ротора свыше 300 об/мин пропорционально растёт частота импульсов и, соответственно, увеличивается индуктивное сопротивление обмотки. При питании от 24 В драйверу перестаёт хватать напряжения питания для поддержания тока в обмотках, и крутящий момент неуклонно снижается. То же самое происходит при питании драйвера от 48 В, но уже гораздо значительно позже, при частоте вращения 600-700 об/мин.
Итак, с мощностью и величиной напряжения блока питания всё ясно, теперь необходимо переходить к практической реализации универсального драйвера, способного как к филигранной работе при помощи крохотных NEMA 11, так и к сотрясению основ мира в паре с могучими NEMA 23. Какими же основными качествами должен иметь драйвер моей мечты?
1. Высокое напряжение питания. Поскольку в техдокументации к моторам крайне редко указано максимальное напряжение питания, лучше будет ограничиться напряжением 48 В.
2. Важнейший параметр: высокий выходной ток. NEMA 23 имеют рабочие токи вплоть до 3,5 А, драйвер должен обеспечивать этот ток с запасом 30%. Путём нехитрых расчётов получаем максимальный рабочий ток около 4,5 А.
3. Простая и оперативная подстройка силы выходного тока.
4. Наличие микростеппинга, как минимум 1/8 шага
5. Наличие защиты от КЗ, перегрева, и т.д.
6. Небольшой размер, возможность крепления произвольного радиатора.
7. Исполнeние в виде интегральной схемы. XXI век на дворе!
8. Простая схема включения с минимальным количеством дискретных компонентов.
9. Низкая цена.
После множества бессонных ночей пятиминутного копания в Google выяснилось, что единственной доступной микросхемой драйвера с подходящими параметрами является TB6600HG. Покупка готового китайского драйвера на eBay показала, что не всё ладно в датском королевстве, далеко не всё. В частности, китайский драйвер отказался напрямую работать с выходами Arduino Due, и «завёлся» только через буферный преобразователь уровней. При работе с трёхамперной нагрузкой драйвер грелся и терял шаги десятками. Вскрытие пациента показало, что в нём не только была установлена микросхема предыдущего поколения (TB6560), а даже и термопаста не смогла найти себе места в списке компонентов. К тому же размерами и весом китайский драйвер наводил меня на мысли о моей молодости… о прошлом веке, если быть совсем точным. Ну нафиг, сказал во мне интеллигент в третьем поколении, мы сделаем свой драйвер, с преферансом и поэтессами. Если бы разработчики KiCAD видели, как я обращаюсь с их детищем, я разорился бы на одних только адвокатах:
С целью минимизации размеров была спроектирована четырёхслойная печатная плата. Этот факт, к сожалению, исключает её изготовление в домашних условиях. Посему на берлинской фирме LeitOn были заказаны 36 таких плат, каждая из которых обошлась в итоге около пяти евро. Часть этих плат были впоследствии выкуплены у меня собратьями по увлечению, и в итоге изготовление плат вышло не слишком накладным предприятием. Микросхемы TBB6600HG были заказаны на Aliexpress по 4 евро за штуку, остальные компоненты были заказаны на eBay, в пересчёте на один драйвер цена дискретных компонентов составила 2 евро. В качестве радиаторов были взяты пятисантиметровые отрезки П-образного алюминиевого профиля, пластиковые каркасы были отпечатаны на 3D принтере. Итого цена одного драйвера составила около 12 евро. Это справедливая цена за драйвер со следующими характеристиками:
Напряжение питания от 8 до 42 Вольт
Максимальный долговременный рабочий ток 4,5 Ампер, устанавливается потенциометром
Микростеппинг вплоть до 1/16 шага
Защита: КЗ, перегрев, низкое напряжение питания
Компактные размеры и низкий вес
Работа с уровнями входных сигналов от 3,3 до 5,5 вольт
Простая установка микростеппинга с помошью микропереключателей — к чёрту перемычки!
Готовые печатные платы:
Собранные и недособранные драйверы.
Видео работы драйвера в моём старом 3D принтере. Здесь трёхамперный NEMA 17 бодро гоняет подогреваемую рабочую площадку принтера размером 45 х 25 см через шестнадцатимиллиметровый шпиндель длиной 60 см:
Финальное фото: самодельные драйвера на своём рабочем месте в моём новом 3D принтере.
Публикуется под лицензией WTFPL
Ну, и традиционное: Have fun!
Шаговый двигатель 28BYJ-48: описание, подключение, схема, характеристики
Содержание
Обзор шагового двигателя 28BYJ-48
Шаговые двигатели применяют в механических системах точного позиционирования – ЧПУ станках, 3d-принтерах, принтерах, роботах-манипуляторах. Шаговые двигатели преобразуют электрические импульсы в перемещение вала на определенный угол. Минимально возможный угол перемещения шагового двигателя, называется шагом.
В любительской робототехнике очень часто используют бюджетный шаговый двигатель 28BYJ-48, в комплекте с которым продается драйвер двигателя на микросхеме ULN2003, необходимый для подключения шагового двигателя к плате Arduino.

Рисунок 1. Шаговый двигатель 28BYJ-48 с драйвером на микросхеме ULN2003.
Характеристики шагового двигателя 28BYJ-48:
-
Напряжение питания – 5В или 12В;
-
Число фаз – 4;
-
Коэффициент редукции – 1/63.68395;
-
Количество шагов ротора – 64;
-
Номинальная скорость вращения – 15 оборот/мин;
-
Крутящий момент – 450 г*см;
-
Размеры (диаметр,высота) –25×18 мм;
-
Вес – 40 грамм.
Принципиальная схема шагового двигателя 28BYJ-48 приведена на рис. 2.

Рисунок 2. Принципиальная схема шагового двигателя 28BYJ-48.
Что такое шаговый двигатель, его принцип работы и зачем он нужен?

Что такое шаговый двигатель?
Содержание статьи
Шаговый двигатель — это бесщёточный синхронный электродвигатель преобразующий электрическую энергию в механическую. Основное отличие шаговых электродвигателей от обычных, заключается в способе вращения «шагами», из-за чего и происходит данное название электродвигателя.На сегодняшнее время шаговые двигатели широко используются в различной оргтехнике, автоматическом электроинструменте, в машиностроении и т. д., там, где требуется достаточно высокая точность позиционирования. Не меньшей популярностью пользуются шаговые двигатели и для изготовления самодельных ветрогенераторов.
О том, что такое шаговый двигатель и зачем он нужен, будет рассказано в данной статье строительного журнала samastroyka.ru.
Что такое шаговый двигатель?
Шаговый двигатель — это электромеханическое устройство способное преобразовывать электрический ток в дискретные (состоящие из отдельных частей) угловые перемещения ротора. Благодаря наличию в конструкции шаговых двигателей постоянного магнита, обмотка последнего способна к самовозбуждению, что позволяет использовать шаговый двигатель в качестве основного элемента ветрогенератора, который производит постоянный электрический ток от вращения лопастей под воздействием силы ветра.

Однако основное применение шаговые двигатели получили в машиностроении и в различной оргтехнике. Благодаря высокой точности и простой интеграции с посторонними приложениями цифрового управления, шаговые электродвигатели позволяют легко автоматизировать работу отдельных систем и узлов сложного устройства. Ну а отсутствие таких элементов в конструкции шагового двигателя как щетки, для передачи электроэнергии, сказывается в первую очередь на длительном сроке службы и его довольно продолжительном ресурсе.
Принцип работы шаговых двигателей
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.

Существуют различные виды шаговых двигателей: однофазные, многофазные и двухфазные, с пассивным либо активным ротором. Для управления шаговым двигателем используется специальный электронный блок управления, который обеспечивает поступление на обмотки электродвигателя определенную последовательность импульсов в зависимости от фазности электродвигателя.
Преимущества и недостатки шаговых электродвигателей
Главным преимуществом шаговых двигателей, является высокая точность поворота ротора на заданный угол. Достичь такого показателя при использовании обычных щёточных электродвигателей попросту невозможно. Как следствие этому, шаговый двигатель — хорошая альтернатива сервоприводу, стоимость которого в разы выше.

Кроме того, неоспоримым преимуществом шаговых двигателей, является и их довольно продолжительный ресурс работы. Целесообразно заметить, что даже за внушительный срок эксплуатации, точность шагового двигателя падает совсем незначительно.
Что же касается недостатков шаговых двигателей, то связаны они, прежде всего с так называемым «проскальзыванием ротора» вследствие значительных нагрузок на вал электродвигателя. В большинстве случаев, избежать подобной проблемы помогает увеличение мощности шагового двигателя или установка специального датчика на своевременное обнаружение подобной проблемы.
Оценить статью и поделиться ссылкой:Как работает шаговый двигатель
Из этой обучающей статьи вы узнаете, как работает шаговый двигатель. Мы рассмотрим основные принципы работы шаговых двигателей, их режимы работы и типы шаговых двигателей по конструкции. Вы можете посмотреть следующее видео или прочитать написанную статью.
Принцип работы
Шаговый двигатель — это бесщеточный двигатель постоянного тока, который вращается ступенчато. Это очень полезно, потому что его можно точно позиционировать без какого-либо датчика обратной связи, который представляет собой контроллер без обратной связи.Шаговый двигатель состоит из ротора, который обычно представляет собой постоянный магнит, и он окружен обмотками статора. По мере того как мы активируем обмотки шаг за шагом в определенном порядке и пропускаем через них ток, они намагничивают статор и создают электромагнитные полюса, соответственно, которые вызывают движение двигателя. Это основной принцип работы шаговых двигателей.

Режимы движения
Существует несколько различных способов управления шаговым двигателем.Первый — это волновой привод или однокатушечное возбуждение. В этом режиме мы активируем только одну катушку за раз, что означает, что в этом примере двигателя с 4 катушками ротор будет выполнять полный цикл за 4 шага.

Далее идет режим полного шага привода, который обеспечивает гораздо более высокий выходной крутящий момент, потому что у нас всегда есть 2 активные катушки в данный момент. Однако это не улучшает разрешающую способность шагового двигателя, и снова ротор выполнит полный цикл за 4 шага.

Для увеличения разрешения шагового двигателя мы используем режим Half Step Drive.Этот режим фактически представляет собой комбинацию двух предыдущих режимов.
Здесь у нас есть одна активная катушка, за которой следуют 2 активные катушки, затем снова одна активная катушка, за которой следуют 2 активные катушки и так далее. Таким образом, в этом режиме мы получаем удвоенное разрешение при той же конструкции. Теперь ротор совершит полный цикл за 8 шагов.
 Однако наиболее распространенным методом управления шаговыми двигателями в настоящее время является микрошаговый. В этом режиме мы подаем на катушки регулируемый ток в виде синусоидальной волны.Это обеспечит плавное движение ротора, снизит нагрузку на детали и повысит точность шагового двигателя.
Однако наиболее распространенным методом управления шаговыми двигателями в настоящее время является микрошаговый. В этом режиме мы подаем на катушки регулируемый ток в виде синусоидальной волны.Это обеспечит плавное движение ротора, снизит нагрузку на детали и повысит точность шагового двигателя.

Другой способ увеличения разрешения шагового двигателя — это увеличение числа полюсов ротора и числа полюсов статора.

Типы шаговых двигателей по конструкции
По конструкции существует 3 различных типа шаговых двигателей: шаговый двигатель с постоянным магнитом, шаговый двигатель с переменным магнитным сопротивлением и гибридный синхронный шаговый двигатель.

Шаговый двигатель с постоянным магнитом имеет ротор с постоянным магнитом, который приводится в движение обмотками статора. Они создают полюса противоположной полярности по сравнению с полюсами ротора, который приводит в движение ротор.

Следующий тип, шаговый двигатель с регулируемым сопротивлением , использует немагнитный ротор из мягкого железа. Ротор имеет зубцы, которые смещены относительно статора, и когда мы активируем обмотки в определенном порядке, ротор перемещается соответственно, так что между статором и зубьями ротора остается минимальный зазор

Гибридный синхронный двигатель это комбинации двух предыдущих степперов.Он имеет зубчатый ротор с постоянными магнитами, а также зубчатый статор. Ротор состоит из двух противоположных по полярности секций, а их зубья смещены, как показано здесь.

Это вид спереди обычно используемого гибридного шагового двигателя, который имеет 8 полюсов на статоре, которые активируются двумя обмотками, A и B. Итак, если мы активируем обмотку A, мы намагнитим 4 полюса, из которых два из них будут иметь южную полярность, а два из них — северную.

Мы видим, что таким образом зубья роторов совмещены с зубьями полюсов A и не совмещены с зубьями полюсов B.Это означает, что на следующем этапе, когда мы отключим полюса A и активируем полюса B, ротор будет двигаться против часовой стрелки, и его зубцы будут совпадать с зубцами полюсов B.

Если мы продолжаем активировать полюса в определенном порядке, ротор будет двигаться непрерывно. Здесь мы также можем использовать различные режимы движения, такие как волновой привод, полный шаговый привод, полушаговый привод и микрошаговый режим, для еще большего увеличения разрешения шагового двигателя.
 .
.Что такое шаговый двигатель и как он работает
От простого DVD-плеера или принтера в вашем доме до сложного станка с ЧПУ или роботизированного манипулятора — шаговые двигатели можно найти почти везде. Его способность выполнять точные движения с электронным управлением позволила этим двигателям найти применение во многих отраслях, таких как камеры наблюдения, жесткие диски, станки с ЧПУ, 3D-принтеры, робототехника, сборочные роботы, лазерные резаки и многое другое. В этой статье мы узнаем, что делает эти моторы особенными, и что за этим стоит теория.Мы узнаем, как использовать его для вашего приложения.
Введение в шаговые двигатели
Как и все двигатели, шаговые двигатели также имеют статор и ротор , но в отличие от обычного двигателя постоянного тока статор состоит из отдельных наборов катушек. Количество катушек будет отличаться в зависимости от типа шагового двигателя , но пока просто поймите, что в шаговом двигателе ротор состоит из металлических полюсов, и каждый полюс будет притягиваться набором катушек в статоре.На схеме ниже показан шаговый двигатель с 8 полюсами статора и 6 полюсами ротора.
Если вы посмотрите на катушки на статоре, они расположены в виде пар катушек, например, A и A ’образуют пару, B и B’ образуют пару и так далее. Таким образом, каждая из этих пар катушек образует электромагнит, и на них можно подавать питание индивидуально с помощью схемы драйвера. Когда на катушку подано напряжение, она действует как магнит, и полюс ротора выравнивается с ним, когда ротор вращается, чтобы выровняться со статором, это называется одной ступенью .Аналогичным образом, последовательно запитывая катушки, мы можем вращать двигатель небольшими шагами, чтобы сделать полный оборот.
Типы шаговых двигателей
В основном существуют три типа шаговых двигателей в зависимости от конструкции:
- Шаговые двигатели с регулируемым сопротивлением: Они имеют ротор с железным сердечником, который притягивается к полюсам статора и обеспечивает движение за счет минимального сопротивления между статором и ротором.
- Шаговые двигатели с постоянными магнитами: Они имеют ротор с постоянными магнитами, и они отталкиваются или притягиваются к статору в соответствии с приложенными импульсами.
- Гибридный синхронный шаговый двигатель: Они представляют собой комбинацию шагового двигателя с переменным сопротивлением и шагового двигателя с постоянным магнитом.
Помимо этого, мы также можем классифицировать шаговые двигатели как униполярные и биполярные в зависимости от типа обмотки статора.
- Биполярный шаговый двигатель: Катушки статора в этом типе двигателя не имеют общего провода. Привод этого типа шагового двигателя отличается и сложен, а схема управления не может быть легко спроектирована без микроконтроллера.
- Униполярный шаговый двигатель: В этом типе шагового двигателя мы можем взять центральное ответвление обеих фазных обмоток на общую землю или на общую мощность, как показано ниже. Это упрощает управление двигателями, также существует много типов униполярных шаговых двигателей.
Режимы работы шагового двигателя
Поскольку статор шагового режима состоит из разных пар катушек, каждую пару катушек можно возбуждать множеством различных методов, что позволяет управлять режимами во многих различных режимах.Ниже приведены общие классификации
Полный шаговый режим
В режиме полного шага возбуждения мы можем добиться полного вращения на 360 ° с минимальным количеством оборотов (шагов). Но это приводит к меньшей инерции, а также вращение не будет плавным. Есть еще две классификации в режиме полного шага возбуждения, это с пошаговым режимом с одной фазой и двумя фазами .
1. Однофазное пошаговое включение или пошаговое выполнение волны: В этом режиме только одна клемма (фаза) двигателя будет запитана в любой момент времени.Он имеет меньшее количество ступеней и, следовательно, может обеспечить полное вращение на 360 °. Поскольку количество шагов меньше, ток, потребляемый этим методом, также очень низкий. В следующей таблице показана последовательность сигналов для 4-фазного шагового двигателя
.| Шаг | 1 этап | Фаза 2 | Этап 3 | Этап 4 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
2.Двухэтапное включение: Как видно из названия, в этом методе две фазы будут одной. Он имеет такое же количество шагов, как и волновой, но поскольку одновременно возбуждаются две катушки, он может обеспечить лучший крутящий момент и скорость по сравнению с предыдущим методом. Хотя с одной стороны, этот метод потребляет больше энергии.
| Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
1 | 1 | 1 | 0 | 0 |
2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
Полушаговый режим
Полушаговый режим представляет собой комбинацию однофазного и двухфазного режимов.Эта комбинация поможет нам преодолеть вышеупомянутый недостаток обоих режимов.
Как вы, возможно, догадались, поскольку мы комбинируем оба метода, нам нужно выполнить 8 шагов в этом методе, чтобы получить полное вращение. Последовательность переключения для 4-фазного шагового двигателя показана ниже
Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Этап 4 |
1 | 1 | 0 | 0 | 0 |
2 | 1 | 1 | 0 | 0 |
3 | 0 | 1 | 0 | 0 |
4 | 0 | 1 | 1 | 0 |
5 | 0 | 0 | 1 | 1 |
6 | 0 | 0 | 0 | 1 |
7 | 1 | 0 | 0 | 1 |
8 | 1 | 0 | 0 | 0 |
Микрошаговый режим
Микрошаговый режим — это комплекс всего, но он обеспечивает очень хорошую точность наряду с хорошим крутящим моментом и плавной работой.В этом методе катушка будет возбуждена двумя синусоидальными волнами, разнесенными на 90 °. Таким образом, мы можем контролировать направление и амплитуду тока, протекающего через катушку, что помогает нам увеличить количество шагов, которые двигатель должен сделать за один полный оборот. Микрошаговый режим может достигать 256 шагов, чтобы сделать одно полное вращение, это заставляет двигатель вращаться быстрее и плавнее.
Как использовать шаговый двигатель
Хватит скучной теории, допустим, кто-то дает вам шаговый двигатель, например, знаменитый 28-BYJ48, и вам действительно интересно, как он заработает.К этому времени вы бы поняли, что невозможно заставить эти двигатели вращаться, просто запитав их от источника питания, так как бы вы это сделали?
Давайте взглянем на этот шаговый двигатель 28-BYJ48 .
Ладно, в отличие от обычного двигателя постоянного тока, из этого выходят пять проводов всех причудливых цветов, и почему это так? Чтобы понять это, мы должны сначала узнать, как работает степпер, о котором мы уже говорили. Прежде всего, шаговые двигатели не вращают , они шаговые, поэтому их также называют шаговыми двигателями .Это означает, что они будут двигаться только на один шаг за раз. В этих двигателях присутствует последовательность катушек, и эти катушки должны быть запитаны определенным образом, чтобы двигатель вращался. Когда на каждую катушку подается питание, двигатель делает шаг, и последовательность подачи энергии заставляет двигатель делать непрерывные шаги, заставляя его вращаться. Давайте посмотрим на катушки, присутствующие внутри двигателя, чтобы точно знать, откуда берутся эти провода.
Как вы можете видеть, двигатель имеет однополярную 5-выводную катушку .Есть четыре катушки, на которые нужно подавать напряжение в определенной последовательности. На красные провода будет подано + 5 В, а остальные четыре провода будут заземлены для запуска соответствующей катушки. Мы используем любой микроконтроллер, чтобы запитать эти катушки в определенной последовательности и заставить двигатель выполнять необходимое количество шагов. Опять же, есть много последовательностей, которые вы можете использовать, обычно используется 4-шаговый , а для более точного управления также может использоваться 8-шаговый элемент . Таблица последовательности для 4-ступенчатого управления приведена ниже.
Шаг | Катушка под напряжением |
Шаг 1 | А и В |
Шаг 2 | B и C |
Шаг 3 | C и D |
Шаг 4 | D и |
Итак, почему этот мотор называется 28-BYJ48 ? Шутки в сторону!!! Я не знаю.У этого двигателя нет никаких технических причин для такого названия; Возможно, нам не стоит углубляться в это. Давайте посмотрим на некоторые важные технические данные, полученные из таблицы данных этого двигателя на картинке ниже.
Это голова, полная информации, но нам нужно взглянуть на несколько важных, чтобы знать, какой тип шагового двигателя мы используем, чтобы мы могли его эффективно программировать. Сначала мы знаем, что это шаговый двигатель 5 В, поскольку мы запитываем красный провод напряжением 5 В.Кроме того, мы знаем, что это четырехфазный шаговый двигатель, поскольку в нем было четыре катушки. Теперь передаточное число равно 1:64. Это означает, что вал, который вы видите снаружи, сделает один полный оборот только в том случае, если двигатель внутри вращается 64 раза. Это связано с шестернями, которые соединены между двигателем и выходным валом, эти шестерни помогают увеличить крутящий момент.
Еще одна важная информация, на которую следует обратить внимание, — это угол шага : 5,625 ° / 64. Это означает, что двигатель при работе в 8-ступенчатой последовательности будет двигаться на 5.625 градусов для каждого шага, и потребуется 64 шага (5,625 * 64 = 360), чтобы совершить один полный оборот.
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов на оборот для вашего шагового двигателя, потому что только тогда вы сможете эффективно программировать / управлять им.
Предположим, что мы будем работать с двигателем в 4-х шаговой последовательности, поэтому угол шага будет 11,25 °, поскольку он составляет 5,625 ° (указано в таблице данных) для 8-шаговой последовательности, он будет 11.25 ° (5,625 * 2 = 11,25).
Шагов на оборот = 360 / угол шага Здесь 360 / 11,25 = 32 шага на оборот.
Зачем нужны модули драйверов для шаговых двигателей?
Большинство шаговых двигателей работают только с помощью модуля драйвера. Это связано с тем, что модуль контроллера (микроконтроллер / цифровая схема) не сможет обеспечить достаточный ток от своих контактов ввода / вывода для работы двигателя. Поэтому мы будем использовать внешний модуль, например модуль ULN2003 , в качестве драйвера шагового двигателя .Существует много типов модулей драйвера, и номинальные характеристики одного будут меняться в зависимости от типа используемого двигателя. Основным принципом для всех модулей драйверов будет обеспечение достаточного тока для работы двигателя. Кроме того, существуют также модули драйверов, в которых заранее запрограммирована логика, но мы не будем обсуждать это здесь.
Если вам интересно узнать , как вращать шаговый двигатель с помощью микроконтроллера и микросхемы драйвера, то мы рассмотрели много статей о его работе с различными микроконтроллерами:
Теперь я считаю, что у вас достаточно информации, чтобы управлять любым шаговым двигателем, который вам нужен для вашего проекта.Давайте посмотрим на преимущества и недостатки шаговых двигателей.
Преимущества шаговых двигателей
Одним из основных преимуществ шагового двигателя является то, что он имеет отличное управление положением и, следовательно, может использоваться для точного управления. Кроме того, он имеет очень хороший удерживающий момент, что делает его идеальным выбором для робототехники. Считается, что шаговые двигатели имеют более продолжительный срок службы, чем обычные двигатели постоянного тока или серводвигатели.
Недостатки шаговых двигателей
Как и все двигатели, шаговые двигатели также имеют свои недостатки: они вращаются небольшими шагами и не могут достичь высоких скоростей.Также он потребляет энергию для удержания крутящего момента, даже когда он идеален, что увеличивает потребление энергии.
.Как работают шаговые двигатели | Самодельные схемотехнические проекты
В этом посте мы узнаем о шаговом двигателе. Мы будем изучать, что такое шаговый двигатель, его основной рабочий механизм, типы шагового двигателя, режимы шага и, наконец, его преимущества и недостатки.
Что такое шаговый двигатель?
Шаговый двигатель — бесщеточный; его вращающийся вал (ротор) совершает один оборот с определенным количеством шагов. Из-за ступенчатого характера вращения он получил название шагового двигателя.
Шаговый двигатель обеспечивает точное управление углом вращения и скоростью. Это конструкция с открытым контуром, что означает отсутствие механизма обратной связи для отслеживания вращения.
Он может изменять свою скорость, изменять направление вращения и мгновенно фиксироваться в одном положении. Количество ступеней определяется количеством зубьев в роторе. Например: если шаговый двигатель состоит из 200 зубцов, тогда
360 (градус) / 200 (количество зубцов) = 1,8 градуса
Таким образом, каждый шаг будет равен 1.8 степень. Шаговые двигатели управляются микроконтроллерами и схемой драйвера. Он широко используется в лазерных принтерах, 3D-принтерах, оптических приводах, робототехнике и т. Д.
Основной рабочий механизм:
Шаговый двигатель может состоять из нескольких полюсов, намотанных изолированным медным проводом, называемым статором или неподвижной частью двигателя. мотор. Подвижная часть двигателя называется ротором, который состоит из нескольких зубцов.
Когда один полюс находится под напряжением, ближайшие зубцы будут совмещены с этим полюсом, находящимся под напряжением, а другой зубец на роторе будет немного смещен или не совмещен с другими полюсами, не находящимися под напряжением.
Следующий полюс будет под напряжением, а предыдущий полюс будет обесточен, теперь невыровненные полюса будут выровнены с текущим напряженным полюсом, это сделает один шаг.
На следующий полюс подается питание, а на предыдущий полюс обесточивается, это делает следующий шаг, и этот цикл продолжается несколько раз, чтобы сделать один полный оборот.
Вот еще один очень простой пример того, как работает шаговый двигатель:
Обычно зубья ротора представляют собой магниты, расположенные с чередованием северного и южного полюсов.Подобно тому, как полюса отталкиваются и в отличие от притяжения полюсов, теперь обмотка полюса «A» находится под напряжением и принимает под напряжением полюс как северный полюс, а ротор как южный полюс, это притягивает южный полюс ротора к полюсу статора «A», как показано на рисунке.
Теперь полюс A обесточен, а на полюс «B» подано напряжение, теперь южный полюс ротора будет совмещен с полюсом «B». Аналогичные полюс «C» и полюс «D» будут включать и отключать питание одинаковым образом, чтобы завершить один оборот.
Теперь вы понимаете, как работает механизм шагового двигателя.
Типы шаговых двигателей:
Существует три типа шаговых двигателей:
• Шаговый двигатель с постоянным магнитом
• Шаговый двигатель с регулируемым сопротивлением
• Гибридный синхронный шаговый двигатель
Шаговый двигатель с постоянным магнитом:
Шаговый двигатель с постоянным магнитом использует постоянный магнит зубья в роторе, расположенные с чередованием полюсов (Север-Юг-Север-Юг ……), обеспечивают больший крутящий момент.
Шаговый двигатель с переменным сопротивлением:
В шаговом двигателе с переменным сопротивлением в качестве ротора используется материал из мягкого железа с несколькими зубцами, и он работает по принципу минимального сопротивления реактивного сопротивления при минимальном зазоре, что означает, что ближайшие зубья ротора притягиваются к полюсу, когда он заряжен, как металл притягивается к магниту.
Гибридный синхронный шаговый двигатель:
В гибридном шаговом двигателе оба вышеупомянутых метода комбинируются для получения максимального крутящего момента. Это наиболее распространенный тип шаговых двигателей, а также дорогостоящий метод.
Пошаговые режимы:
Есть 3 типа пошаговых режимов
• Полный тактовый режим
• Полушаговый режим
• Микрошаговый режим
Полный пошаговый режим:
Полношаговый режим можно понять на следующем примере: если у шагового двигателя 200 зубцов, то один полный шаг равен 1.На 8 градусов (что указано в начале статьи) он не повернется больше или меньше чем на 1,8 градуса.
Полный шаг далее подразделяется на два типа:
• Однофазный режим
• Двухфазный режим
В обоих фазных режимах ротор выполняет один полный шаг, основная разница между этими двумя состоит в том, что одиночный режим дает меньший крутящий момент и двухфазный режим дают больший крутящий момент.
• Однофазный режим:
В однофазном режиме только одна фаза (группа обмоток / полюсов) получает питание в определенный момент времени, это наименее энергоемкий метод, но он также дает меньший крутящий момент.
• Двухфазный режим:
В двухфазном режиме на две фазы (две группы обмоток / полюс) подается питание в заданное время; он производит больший крутящий момент (от 30% до 40%) в однофазном режиме.
Полушаговый режим:
Полушаговый режим выполняется для удвоения разрешения двигателя. Полушаг, как следует из названия, занимает половину одного полного шага, вместо полных 1,8 градуса, полушага занимает 0,9 градуса.
Полушаг достигается за счет попеременного изменения однофазного режима и двухфазного режима.Это снижает нагрузку на механические части и увеличивает плавность вращения. Полушаг снижает крутящий момент примерно на 15%. Но крутящий момент можно увеличить, увеличив ток, подаваемый на двигатель.
Микрошаговый:
Микрошаговый выполняется для максимально плавного вращения. Один полный шаг делится на 256 шагов. Для микрошага нужен специальный контроллер микрошага. Его крутящий момент составляет примерно 30%.
Драйверы должны вводить синусоидальную волну для вращения жидкости.Драйверы выдают два синусоидальных входа с фазой на 90 градусов.
Обеспечивает наилучший контроль вращения, значительно снижает механическое напряжение и снижает рабочий шум.
Основные преимущества и недостатки шагового двигателя можно узнать из следующих пунктов:
Преимущества:
• Лучший контроль углового вращения.
• Высокий крутящий момент при низкой скорости.
• Мгновенное изменение направления вращения.
• Минимальная механическая конструкция.
Недостатки:
• Энергия расходуется даже при отсутствии вращения; это сделано для фиксации ротора в фиксированном положении.
• Нет механизма обратной связи для исправления ошибок вращения и отслеживания текущего положения.
• Требуется сложная схема драйвера.
• Крутящий момент уменьшается при более высокой скорости.
• Нелегко управлять двигателем на более высокой скорости.
О компании Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем / печатных плат, производитель.Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными идеями и руководствами по схемам.
Если у вас есть запрос, связанный со схемой, вы можете взаимодействовать с ним через комментарии, я буду очень рад помочь!
Как работают шаговые двигатели
На рисунках ниже показаны два поперечных сечения 5-фазного шагового двигателя. Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор состоит из трех компонентов: ротора 1, ротора 2 и постоянного магнита. Ротор намагничен в осевом направлении, так что, например, если ротор 1 поляризован на север, ротор 2 будет поляризован на юг.
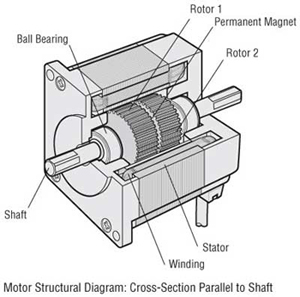
Статор имеет десять магнитных полюсов с небольшими зубцами, каждый из которых снабжен обмоткой.Каждая обмотка соединена с обмоткой противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток проходит через пару обмоток. (Пропускание тока через данную обмотку намагничивает противоположную пару полюсов с одинаковой полярностью, то есть на север или юг.)
Противоположная пара полюсов составляет одну фазу. Поскольку имеется пять фаз, от A до E, двигатель называется «5-фазным шаговым двигателем».
По внешнему периметру каждого ротора имеется 50 маленьких зубцов, при этом маленькие зубья ротора 1 и ротора 2 механически смещены друг относительно друга на половину шага зубьев.
Возбуждение: Для подачи тока через обмотку двигателя
Магнитный полюс: Выступающая часть статора, намагничиваемая возбуждением
Маленькие зубцы: Зубцы на роторе и статоре
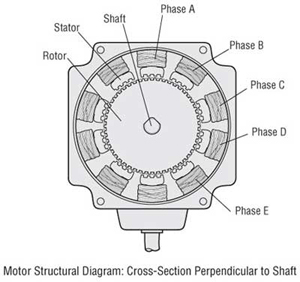
Принцип работы
Ниже приводится объяснение взаимосвязи между маленькими зубцами намагниченного статора и маленькими зубьями ротора.
При возбуждении фазы «А»
Когда фаза A возбуждена, ее полюса поляризованы на юг.Это притягивает зубцы ротора 1, поляризованные на север, и отталкивает зубцы ротора 2, поляризованные на юг. Таким образом, силы, действующие на всю установку в равновесии, удерживают ротор в неподвижном состоянии. В это время зубцы полюсов фазы В, которые не возбуждаются, смещены с зубцами ротора 2 с южной поляризацией, так что они смещены на 0,72˚. Это суммирует взаимосвязь между зубьями статора и зубцами ротора при возбуждении фазы А.
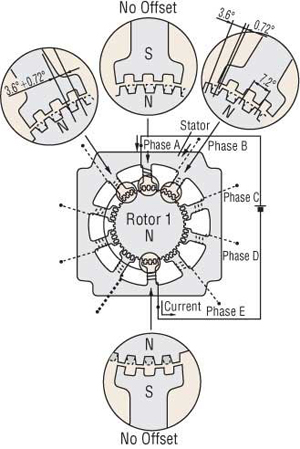
Когда фаза «B» возбуждена
Когда возбуждение переключается с фазы A на B, полюса фазы B поляризованы на север, притягивая южную полярность ротора 2 и отталкивая северную полярность ротора 1.
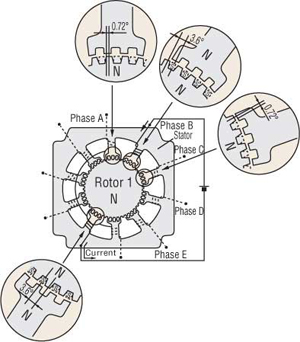
Другими словами, когда возбуждение переключается с фазы A на B, ротор вращается на 0,72˚. Когда возбуждение переходит от фазы A к фазам B, C, D и E, а затем обратно к фазе A, шаговый двигатель вращается точно с шагом 0,72˚. Чтобы повернуть назад, измените последовательность возбуждения на фазы A, E, D, C, B, а затем обратно на фазу A.
Высокое разрешение 0,72˚ присуще механическому смещению между статором и ротором, что позволяет достичь точного позиционирования без использования энкодера или других датчиков.Достигнута высокая точность остановки, составляющая 3 угловых минуты (без нагрузки), поскольку единственными факторами, влияющими на точность остановки, являются вариации в точности обработки статора и ротора, точности сборки и сопротивления обмоток постоянному току.
Драйвер выполняет функцию переключения фаз, и его синхронизация регулируется импульсным сигналом, подаваемым на драйвер. В приведенном выше примере показано, как возбуждение продвигается по одной фазе за раз, но в реальном шаговом двигателе эффективное использование обмоток обеспечивается одновременным возбуждением четырех или пяти фаз.
Основные характеристики шаговых двигателей
Важным моментом, который следует учитывать при применении шаговых двигателей, является соответствие характеристик двигателя условиям эксплуатации.
В следующих разделах описываются характеристики, которые следует учитывать при применении шаговых двигателей.
Две основные характеристики шагового двигателя:
- Динамические характеристики: Это пусковые и вращательные характеристики шагового двигателя, в основном влияющие на движение механизма и время цикла.
- Статические характеристики: Это характеристики, относящиеся к изменениям угла, которые происходят, когда шаговый двигатель находится в режиме покоя, что влияет на уровень точности оборудования.

Динамические характеристики
Скорость — характеристики крутящего момента На приведенном выше рисунке показан график характеристик, показывающий взаимосвязь между скоростью и крутящим моментом ведомого шагового двигателя.Эти характеристики всегда учитываются при выборе шагового двигателя. По горизонтальной оси отложена скорость на выходном валу двигателя, а по вертикальной оси — крутящий момент. Характеристики крутящего момента и скорости определяются двигателем и приводом и в значительной степени зависят от типа используемого привода.
- Максимальный удерживающий момент (TH) Максимальный удерживающий момент — это максимальная удерживающая сила (крутящий момент) шагового двигателя при подаче питания (при номинальном токе), когда двигатель не вращается.
- Момент отрыва Момент отрыва — это максимальный крутящий момент, который может быть выдан при заданной скорости. При выборе двигателя убедитесь, что требуемый крутящий момент находится в пределах этой кривой.
- Максимальная пусковая частота (fS) Это максимальная скорость импульса, при которой двигатель может запускаться или останавливаться мгновенно (без времени ускорения / замедления), когда фрикционная нагрузка и инерционная нагрузка шагового двигателя равны 0.Привод двигателя с импульсной скоростью, превышающей эту скорость, потребует постепенного ускорения или замедления. Эта частота будет уменьшаться при добавлении инерционной нагрузки к двигателю. См. Характеристики инерционной нагрузки — пусковой частоты ниже.
Максимальная частота отклика (fr) Это максимальная импульсная скорость, при которой двигатель может работать с постепенным ускорением или замедлением, когда фрикционная нагрузка и инерционная нагрузка шагового двигателя равны 0.На приведенном ниже рисунке показаны скоростные характеристики 5-фазного шагового двигателя и блока драйвера.
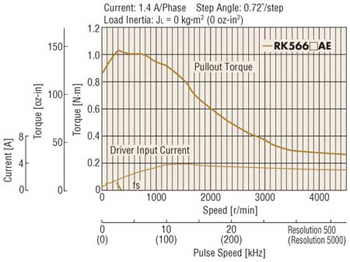
Инерционная нагрузка — Характеристики пусковой частоты Эти характеристики показывают изменения пусковой частоты, вызванные инерцией нагрузки. Поскольку ротор и нагрузка шагового двигателя имеют свой собственный момент инерции, во время мгновенного пуска и останова на оси двигателя возникают задержки и опережения. Эти значения изменяются в зависимости от скорости импульса, но двигатель не может следовать за скоростью импульса за пределами определенной точки, что приводит к ошибкам.Скорость импульса непосредственно перед возникновением ошибки называется начальной частотой.
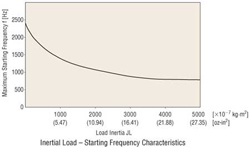
Изменения максимальной пусковой частоты с инерционной нагрузкой можно приблизительно рассчитать по следующей формуле:
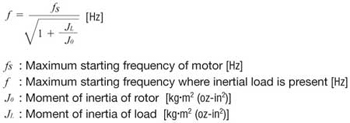
Вибрационные характеристики
Шаговый двигатель вращается за счет серии шаговых движений. Шаговое движение можно описать как одноступенчатую реакцию, как показано ниже:
1.Одиночный импульсный ввод на шаговый двигатель в состоянии покоя ускоряет двигатель до следующего положения остановки.
2. Ускоренный двигатель проходит через положение остановки, выходит за определенный угол и возвращается назад в обратном направлении.
3. Двигатель останавливается в заданном положении остановки после демпфирующих колебаний.

Вибрация на низких скоростях вызывается ступенчатым движением, которое вызывает этот тип демпфирующих колебаний.График вибрационных характеристик ниже представляет величину вибрации вращающегося двигателя. Чем ниже уровень вибрации, тем плавнее будет вращение двигателя.
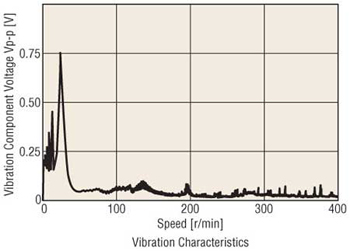
Статические характеристики
Угловые характеристики крутящего момента: Угловые характеристики крутящего момента показывают взаимосвязь между угловым смещением ротора и крутящим моментом, приложенным извне к валу двигателя, когда двигатель возбуждается номинальным током.График этих характеристик показан ниже:
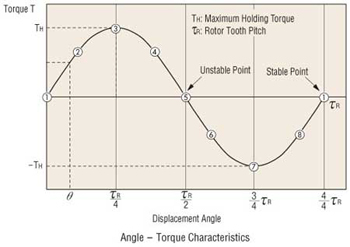
На следующих рисунках показано взаимное расположение зубцов ротора и статора в пронумерованных точках на схеме выше. Когда он удерживается в стабильном положении в точке (1), внешнее приложение силы к валу двигателя будет создавать крутящий момент T (+) в левом направлении, пытаясь вернуть вал в стабильную точку (1). Вал остановится, когда внешняя сила сравняется с этим крутящим моментом в точке (2).
Если приложить дополнительную внешнюю силу, существует угол, при котором создаваемый крутящий момент достигнет максимума в точке (3). Этот крутящий момент называется максимальным удерживающим моментом TH.
Приложение внешней силы, превышающей это значение, приведет к перемещению ротора в нестабильную точку (5) и за ее пределы, создавая крутящий момент T (-) в том же направлении, что и внешняя сила, так что он перемещается в следующую устойчивую точку (1 ) и останавливается.
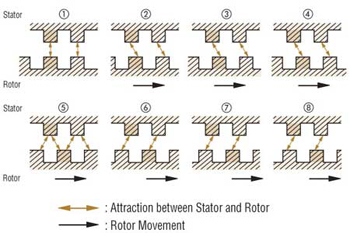
Точки устойчивости: Точки остановки ротора, при этом зубья статора и зубья ротора точно совмещены.Эти точки чрезвычайно устойчивы, и ротор всегда будет останавливаться в них, если не будет приложена внешняя сила.
Точки нестабильности: Точки, в которых зубья статора и ротора находятся на половине шага от совмещения. Ротор в этих точках переместится в следующую устойчивую точку слева или справа, даже под действием малейшей внешней силы.
Угловая точность
В условиях холостого хода шаговый двигатель имеет угловую точность в пределах ± 3 угловых минуты (± 0.05˚). Небольшая погрешность возникает из-за разницы в механической точности статора и ротора и небольшого разброса сопротивления постоянному току обмотки статора. Как правило, угловая точность шагового двигателя выражается в точности положения остановки.
Точность положения остановки: Точность положения остановки — это разница между теоретическим положением остановки ротора и его фактическим положением остановки. Заданная точка остановки ротора берется за начальную точку, тогда точность положения остановки — это разница между максимальным (+) значением и максимальным (-) значением в наборе измерений, сделанных для каждого шага полного вращения.
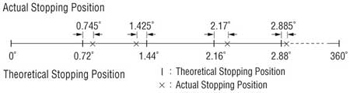
Точность положения остановки находится в пределах ± 3 угловых минуты (± 0,05˚), но только при отсутствии нагрузки. В реальных приложениях всегда присутствует одинаковая нагрузка на трение. Угловая точность в таких случаях достигается за счет углового смещения, вызванного характеристиками угол — крутящий момент, основанными на нагрузке трения. Если фрикционная нагрузка постоянна, угол смещения будет постоянным для работы в одном направлении.
Однако при работе в двух направлениях угол смещения увеличивается вдвое за один проход.Когда требуется высокая точность остановки, всегда выполняйте позиционирование в одном и том же направлении.
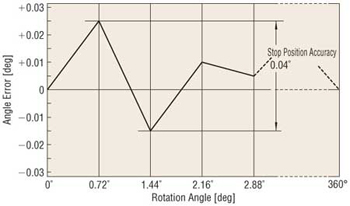
Последовательность возбуждения шагового двигателя и пакетов драйверов
Каждый 5-фазный двигатель и драйвер, перечисленные в нашем каталоге, состоят из нового пятиугольника, двигателя с пятью выводами и драйвера со специальной последовательностью возбуждения. Эта комбинация, запатентованная Oriental Motor, предлагает следующие преимущества:
- Простые соединения для пяти выводов
- Низкая вибрация
В следующих разделах описывается последовательность подключения и возбуждения.
Новый пятиугольник, 4-фазное возбуждение: система полного шага (0,72˚ / шаг)
Это уникальная система для 5-фазного двигателя, в которой возбуждаются четыре фазы. Угол шага составляет 0,72˚ (0,36˚). Он обеспечивает отличный демпфирующий эффект и, следовательно, стабильную работу.

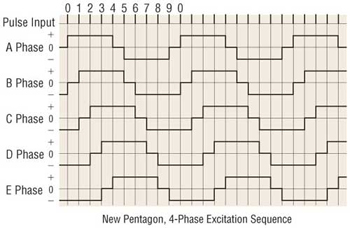
Новый пятиугольник, 4-5-фазное возбуждение: полушаговая система (0,36˚ / шаг)
Последовательность шагов с чередованием 4-фазного и 5-фазного возбуждения производит вращение на 0.36˚ за шаг. Один оборот можно разделить на 1000 шагов.
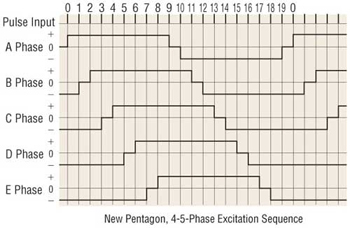
Драйверы шагового двигателя
Существует две общие системы привода шагового двигателя: привод постоянного тока и привод постоянного напряжения. Схема привода постоянного напряжения проще, но добиться характеристик крутящего момента на высоких скоростях относительно сложнее.
Привод постоянного тока, с другой стороны, в настоящее время является наиболее часто используемым методом привода, поскольку он обеспечивает отличные характеристики крутящего момента на высоких скоростях.Все драйверы Oriental Motor используют систему привода постоянного тока.
Обзор системы привода постоянного тока
Шаговый двигатель вращается за счет последовательного переключения тока, протекающего через обмотки. Когда скорость увеличивается, скорость переключения также увеличивается, и рост тока замедляется, что приводит к потере крутящего момента. Прерывание постоянного напряжения, намного превышающего номинальное напряжение двигателя, гарантирует, что номинальный ток достигнет двигателя даже на более высоких скоростях.

Ток, протекающий по обмоткам двигателя, определяемый как напряжение через резистор для определения тока, сравнивается с опорным напряжением. Текущий контроль осуществляется путем проведения переключения транзистора TR2, когда напряжение через резистор обнаружения ниже, чем опорное напряжение (когда она еще не достигла номинального тока), или поворота TR2 OFF, когда значение выше, чем опорное напряжение ( когда он превышает номинальный ток), тем самым обеспечивая постоянный поток номинального тока.
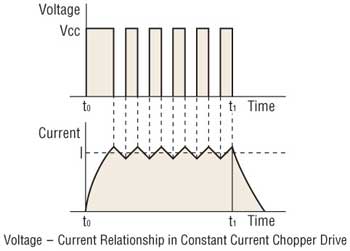
Различия между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах 100-115 В переменного тока вход выпрямляется до постоянного тока, а затем на двигатель подается примерно 140 В постоянного тока. (Некоторые продукты являются исключением.)
Эта разница в напряжениях, подаваемых на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях.Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает приложение номинального тока на более высоких скоростях.
Таким образом, двигатель с входом переменного тока и приводной блок имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение. Для ваших приложений рекомендуется использовать двигатель с входом переменного тока и пакеты драйверов, которые совместимы с более широким диапазоном условий эксплуатации.
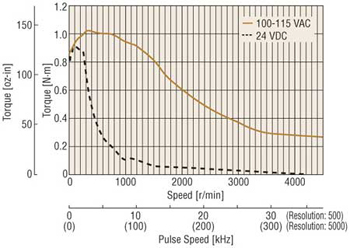
Приводная техника Microstep
Технология приводаMicrostep используется для разделения основного угла шага (0,72˚) 5-фазного шагового двигателя на более мелкие шаги (максимум до 250 делений) без использования механизма снижения скорости.
◇ Технология привода Microstep
Шаговый двигатель перемещается и останавливается с шагом, определяемым структурой явных полюсов ротора и статора, легко
обеспечивая высокую степень точности позиционирования.Шаговый двигатель, с другой стороны, вызывает изменение скорости ротора, потому что
двигатель вращается с шагом шага угла, что приводит к резонансу или большей вибрации при данной скорости.
Microstepping — это технология, которая обеспечивает низкий резонанс и низкий уровень шума при работе на чрезвычайно низких скоростях за счет управления потоком электрического тока
, подаваемого на катушку двигателя, и тем самым деления основного угла шага двигателя на более мелкие шаги.
- Угол основного шага двигателя (0.72˚ / полный шаг) можно разделить на более мелкие шаги от 1/1 до 1/250. Таким образом, микрошаг обеспечивает плавную работу.
- Благодаря технологии плавного изменения тока привода двигателя, вибрация двигателя может быть сведена к минимуму для малошумной работы.
◇ До 250 микрошагов
Благодаря микрошаговому драйверу можно установить разные углы шага (от 16 шагов до 250 делений) с помощью двух переключателей установки угла шага. Управляя входным сигналом для переключения угла шага через внешний источник, можно переключать угол шага между уровнями, установленными для соответствующих переключателей.
Характеристики Microstep Drive
● Низкая вибрация
Технология привода Microstep с помощью электроники делит угол шага на более мелкие шаги, обеспечивая плавное пошаговое движение на низких скоростях и значительно снижая вибрацию. В то время как демпфер или подобное устройство обычно используется для уменьшения вибрации, конструкция с низким уровнем вибрации, используемая для самого двигателя, наряду с технологией микрошагового привода, снижает вибрацию более эффективно.Меры по защите от вибрации можно значительно упростить, поэтому он идеально подходит для большинства чувствительных к вибрации приложений и оборудования.
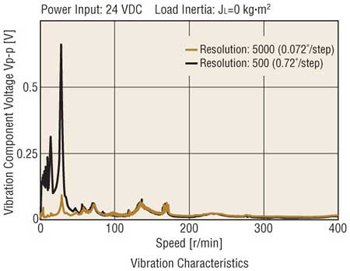
● Низкий уровень шума
Технология привода Microstep эффективно снижает уровень шума, связанный с вибрацией, на низких скоростях, обеспечивая низкий уровень шума. Двигатель демонстрирует выдающиеся характеристики даже в самых чувствительных к шуму условиях.
● Улучшенная управляемость
Новый микрошаговый драйвер Pentagon с его превосходными характеристиками демпфирования сводит к минимуму перерегулирование и недорегулирование в ответ на скачкообразные изменения, точно следуя импульсной последовательности и обеспечивая улучшенную линейность.Кроме того, можно уменьшить шок, обычно возникающий в результате движений при запуске и остановке.
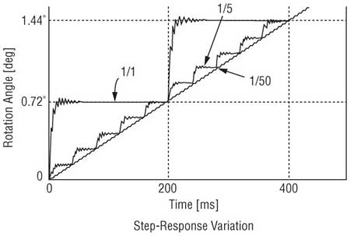
Шаговый двигатель и пакет драйвера
Обзор системы управления
◇ Датчик для определения положения ротора
Датчик положения ротора встроен в встречный конец выходного вала двигателя:
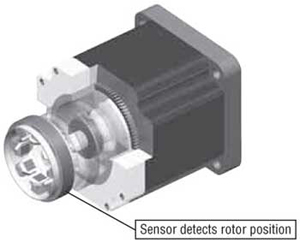
Обмотка датчика определяет изменения магнитного сопротивления из-за углового положения ротора.
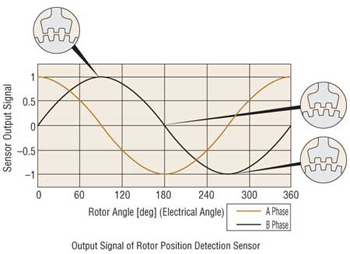
с инновационным замкнутым контуром управления
Счетчик отклонения вычисляет отклонение (отставание / опережение) фактического углового положения ротора по отношению к команде положения посредством импульсного сигнала. Результат расчета используется для обнаружения «области ошибочного шага» и управления двигателем путем переключения между режимами разомкнутого и замкнутого контура.
- Если отклонение позиционирования меньше} 1,8˚, двигатель работает в режиме разомкнутого контура.
- Если отклонение позиционирования составляет} 1,8˚ или более, двигатель работает в режиме замкнутого контура.
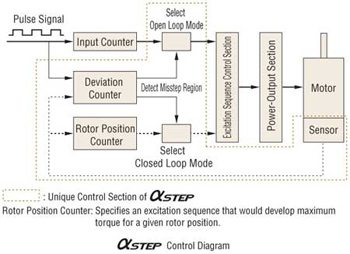
В режиме замкнутого контура возбуждение обмотки двигателя регулируется так, чтобы для данного углового положения ротора развивался максимальный крутящий момент. Такой метод управления позволяет исключить нестабильные точки (области ошибочного шага) в углово-крутящих характеристиках.
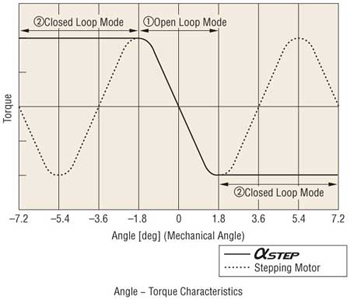
Особенности AlphaStep
◇ Улучшенные характеристики шагового двигателя
- На высоких скоростях не будет «оплошностей».”Следовательно, в отличие от обычных шаговых двигателей, работа будет свободна от следующих ограничений:
- Ограничения на скорость ускорения / замедления и коэффициент инерции, вытекающие из профиля импульсов контроллера.
- Ограничение скорости стартового импульса, вызванное «ошибкой».
- Используйте фильтр скорости, чтобы отрегулировать реакцию при запуске / остановке. Чувствительность пуска / остановки можно регулировать с помощью 16 настроек без изменения данных контроллера (пусковой импульс, скорость ускорения / замедления).Эта функция предназначена для уменьшения ударов при работе и вибрации при работе на низкой скорости.
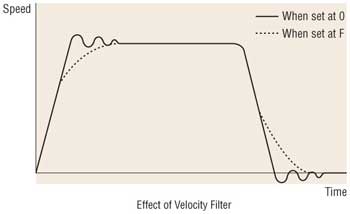
Возврат к работе в механическом режиме с использованием сигнала синхронизации возбуждения
● Сигнал синхронизации возбуждения
Сигнал синхронизации возбуждения (TIM.) Выводится, когда драйвер первоначально возбуждает шаговый двигатель (шаг «0»). 5-фазный шаговый двигатель и драйверы Oriental Motor выполняют начальное возбуждение при включении питания и продвигают последовательность
возбуждения каждый раз, когда вводится импульсный сигнал, завершая один цикл, когда вал двигателя вращается 7.2˚.
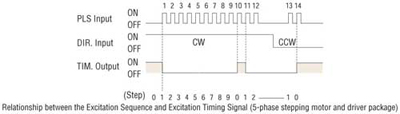
Используйте эти временные сигналы, когда необходимо выполнить возврат к механическому дому с высокой воспроизводимостью. В следующих разделах описывается возврат шагового двигателя в механический режим работы и использование сигналов синхронизации.
● Return to Mechanical Home Operation для шаговых двигателей
При включении питания для запуска автоматизированного оборудования или перезапуске оборудования после сбоя питания необходимо вернуть шаговые двигатели в их стандартное положение.Эта операция называется «возвращением к механическому дому».
При возврате к механическому домашнему режиму для шаговых двигателей используются домашние датчики для обнаружения механического компонента, используемого для операции позиционирования. Когда обнаруженные сигналы подтверждаются, контроллер останавливает импульсный сигнал, и шаговый двигатель останавливается. Точность исходного положения при таком возврате к механическому домашнему режиму зависит от характеристик обнаружения домашних датчиков. Поскольку характеристики обнаружения домашних датчиков варьируются в зависимости от таких факторов, как температура окружающей среды и скорость приближения к области обнаружения механизма, необходимо уменьшить эти факторы для приложений, которые требуют высокопроизводительного механического обнаружения исходного положения.
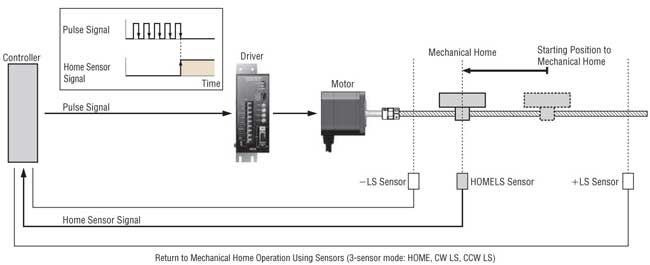
● Улучшенная воспроизводимость с использованием сигнала синхронизации возбуждения
Способ обеспечения того, чтобы механическое исходное положение не изменялось из-за изменений в характеристиках обнаружения датчиков исходного положения, заключается в остановке импульсного сигнала путем логического умножения на сигнал синхронизации. Поскольку синхронизирующий сигнал выводится при начальном возбуждении, если импульсный сигнал останавливается, когда тактовый сигнал выводится, механическое исходное положение всегда будет определяться при начальном возбуждении.
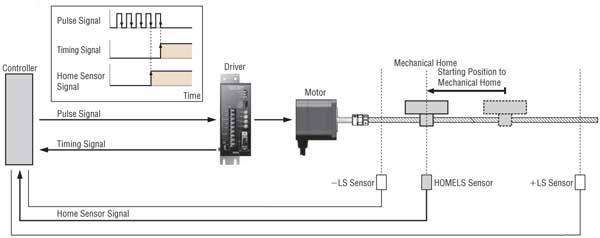
Взаимосвязь между длиной кабеля и частотой передачи
По мере увеличения длины кабеля импульсной линии максимальная частота передачи уменьшается. В частности, резистивная составляющая и паразитная емкость кабеля вызывают формирование схемы CR, тем самым задерживая время нарастания и спада импульса. Паразитная емкость в кабеле возникает между электрическими проводами и плоскостями заземления. Однако трудно предоставить четкие числовые данные, поскольку условия зависят от типа кабеля, его разводки, трассировки и других факторов.

Частота передачи при работе в сочетании с нашими продуктами (контрольные значения фактических измерений) показаны ниже:
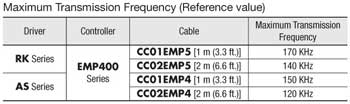
Влияние жесткости муфты на оборудование
Технические характеристики, указывающие на характеристики муфты, включают допустимую нагрузку, допустимую скорость, жесткость пружины кручения, люфт (люфт) в муфте и допустимое смещение. На практике при выборе муфт для оборудования, которое требует высоких характеристик позиционирования или низкой вибрации, основным критерием выбора будет «жесткость, без люфта».«Однако в некоторых случаях жесткость муфты лишь незначительно влияет на общую жесткость оборудования.
В этом разделе приводится пример сравнения общей жесткости оборудования, состоящего из шарико-винтовой передачи, в двух приложениях, где используются кулачковая муфта, такая как MCS, и сильфонная муфта, обеспечивающая более высокую жесткость. (Данные взяты из технического документа KTR, по этой причине размеры муфт отличаются от продуктов, предлагаемых Oriental Motor.)
Обзор испытательного оборудования
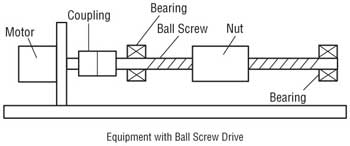
Технические характеристики деталей
Жесткость пружины кручения кулачковой муфты
Cj = 21000 [Н м / рад]
Жесткость пружины кручения сильфонной муфты
Cb = 116000 [Н м / рад]
Жесткость серводвигателя
Cm =
[Н м / рад]
Шаг шарико-винтовой передачи
h = 10 [мм]
Диаметр корневой окружности ШВП
d = 28.5 [мм]
Длина шарико-винтовой передачи
L = 800 [мм]
Жесткость подшипника в осевом направлении
Rbrg = 750 [Н / мкм]
Жесткость гайки шарико-винтовой передачи в осевом направлении
Rn = 1060 [Н / мкм]
Модуль упругости ШВП
Rf = 165000 [Н / мм2]
1. Получите жесткость на кручение шарико-винтовой передачи, подшипника и гайки. Жесткость в осевом направлении шарико-винтовой передачи Rs рассчитывается следующим образом:
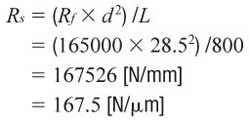
Таким образом, общая жесткость в осевом направлении шарико-винтовой передачи, подшипника и гайки Rt рассчитывается следующим образом:
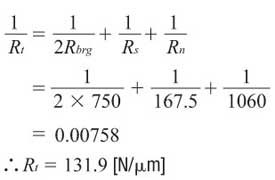
Эта жесткость в осевом направлении применяется как жесткость на кручение Ct.
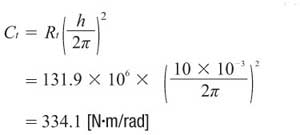
2. Обеспечьте общую жесткость оборудования C при использовании кулачковой муфты.
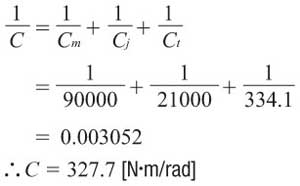
3. Обеспечьте общую жесткость оборудования C при использовании сильфонной муфты.

4. Результаты расчетов