Утвержден
Постоянной Комиссией стандартизации Фридрихрода, декабрь 1976 г. Настоящий стандарт СЭВ распространяется на вращающиеся электрические машины и устанавливает методы определения момента инерции их вращающихся частей. Единицей измерения момента инерции вращающейся части I является килограмм-метр в квадрате (кг × м2). Для определения момента инерции применяются следующие методы: крутильных колебаний; вспомогательного маятника; самоторможения. 2.1. Метод крутильных колебаний Метод крутильных колебаний следует предпочтительно применять для определения момента инерции вращающихся частей электрических машин мощностью до 100 кВт. Вращающуюся часть следует подвесить на струне металлической или из иного
высокопрочного материала с изотропной структурой согласно черт. 1. Диаметр
и длину струны выбирают так, чтобы период крутильных колебаний Т был не
менее 1 с. Механическая прочность струны должна соответствовать массе
вращающейся части. Точка подвеса должна находиться точно на ее оси вращения. Вращающуюся часть следует подвергнуть крутильным колебаниям и определить их период Таким же образом и на той же струне следует определить период крутильных колебаний Тн эталона, момент инерции которого определяют расчетным путем. Момент инерции исследуемой вращающейся части вычисляют по формуле (1) где I — момент инерции исследуемой вращающейся части, кг × м2; Iн — момент инерции эталона, кг × м2; Т — период колебаний исследуемой вращающейся части, с; Тн — период колебаний эталона, с. Эталон, момент инерции которого определен расчетным путем, может быть также закреплен на валу исследуемой вращающейся части, как показано на черт. 2. В этом случае момент инерции исследуемой вращающейся части следует определять по формуле (2) где I — момент инерции исследуемой вращающейся части, кг × м2; Iн — момент инерции эталона, кг × м2; Т — период колебаний исследуемой вращающейся части, с; T Более тяжелые вращающиеся части могут быть подвешены на двух параллельных струнах, прикрепленных к вращающейся части симметрично относительно ее оси в соответствии с черт. 3. Длину струн l и расстояния от струн до оси вращающейся части r следует выбирать таким образом, чтобы период крутильных колебаний Т составлял не менее 1 с. Вращающуюся часть необходимо подвергнуть крутильным колебаниям и измерить их период Т. Кроме того, надлежит определить массу вращающейся части (3) где I — момент инерции исследуемой вращающейся части, кг × м2; m — масса исследуемой вращающейся части, кг; r — расстояния от струн до оси вращающейся части, м; l — длина струн, м; Т — период крутильных колебаний вращающейся части, с; g = 9,81 м/с2 — ускорение
земного тяготения. Черт. 2 Черт. 3 2.2. Метод вспомогательного маятника Метод вспомогательного маятника может применяться для определения момента инерции вращающихся частей машин мощностью примерно от 10 до 1000 кВт. Для вращающихся частей, для которых также применим метод крутильных колебаний, последний является предпочтительным. Вращающуюся часть следует установить на подшипниках балансировочного станка. Вращающиеся части с подшипниками качения могут быть установлены также на собственных подшипниках. Если испытание проводится в собранной машине, то в случае двигателей с фазным ротором и коллекторных машин следует поднять щетки. Для определения момента инерции методом
вспомогательного маятника следует прикрепить к валу исследуемой вращающейся
части дополнительную массу mдоп
посредством рычага, как показано на черт. Вращающуюся часть совместно с прикрепленным к ней вспомогательным маятником приводят в колебания. При этом одностороннее угловое отклонение не должно быть более 15°. Период колебаний Т следует определить как средний из нескольких колебаний. Для обеспечения точности измерения периода колебаний его следует производить между моментами прохождения маятника через положение статического равновесия. Черт. 4 Момент инерции испытуемой вращающейся части следует определить по формуле где mдоп — масса вспомогательного маятника, кг; а — расстояние от центра тяжести вспомогательного маятника до оси вала вращающейся части, м; Т — период колебаний маятника, с; g = 9,81 м/с2 — ускорение
земного тяготения. Для проверки полученного значения момента инерции опыт необходимо повторить с дополнительной массой другой величины. 2.3. Метод самоторможения Метод самоторможения может применяться для определения момента инерции вращающихся частей электрических машин мощностью свыше 100 кВт. Согласно этому методу машина с испытуемой вращающейся частью приводится во вращение с частотой выше номинальной при номинальном возбуждении или без него и затем отключается от источника питания. Для машин с фазным ротором и коллекторных машин испытание проводится с минимально необходимым количеством щеток, а остальные щетки надлежит поднять. После отключения определяется кривая самоторможения Черт. В соответствии с черт. 5 момент инерции I исследуемой вращающейся части для невозбужденной машины следует рассчитать по формуле (5) а для возбужденной машины по формуле: (6) где I — момент инерции вращающейся части, кг × м2; Рмех — механические потери при номинальной частоте вращения, Вт; Рст nн — номинальная частота вращения, об/мин; Dn — разность между верхним и нижним значениями частоты вращения в опыте, об/мин; Dt — время, в течение которого частота вращения машины изменяется на Dn, с; wн - номинальная угловая частота вращения, с-1; Dw
— разность между верхним и нижним значениями угловой частоты вращения, с-1. За верхнюю точку частоты вращения принимается наивысшая возможная точка в опыте, но не менее 1,1nн. Нижняя точка должна отличаться от номинальной на такую же величину частоты вращения. В случае невозможности повышения частоты вращения сверх номинального значения, вместо номинальной частоты вращения принимается частота вращения, лежащая на участке примерно от 0,9 до 0,8 номинальной частоты вращения. В этом случае потери должны быть измерены на данной частоте вращения. Если для повышения частоты вращения машина должна быть соединена с приводным двигателем, который невозможно отсоединить на ходу, то в формулах (5) и (6) под потерями следует понимать потери всего агрегата. Из полученного таким образом момента I следует вычесть момент инерции вращающейся части приводного двигателя и соединительной муфты, подлежащей отдельному определению.
ИНФОРМАЦИОННЫЕ ДАННЫЕ 1. 2. Тема 01.553.04-75 3. Стандарт СЭВ утвержден на 40-м заседании ПКС 4. Сроки начала применения стандарта СЭВ:
5. Срок первой проверки — 1983 г., периодичность проверки — 5 лет.
СОДЕРЖАНИЕ
|
||||||||||||||||||||||||||||||||||||||||||||||



 4. Эту массу следует выбрать таким образом, чтобы масса
рычага была пренебрежимо малой по сравнению с дополнительной массой mдоп. Дополнительная масса может быть
закреплена также на наружной поверхности самой вращающейся части, на шкиве или
на полумуфте. Вспомогательный маятник должен быть рассчитан таким образом,
чтобы период колебаний
4. Эту массу следует выбрать таким образом, чтобы масса
рычага была пренебрежимо малой по сравнению с дополнительной массой mдоп. Дополнительная масса может быть
закреплена также на наружной поверхности самой вращающейся части, на шкиве или
на полумуфте. Вспомогательный маятник должен быть рассчитан таким образом,
чтобы период колебаний 
 5
5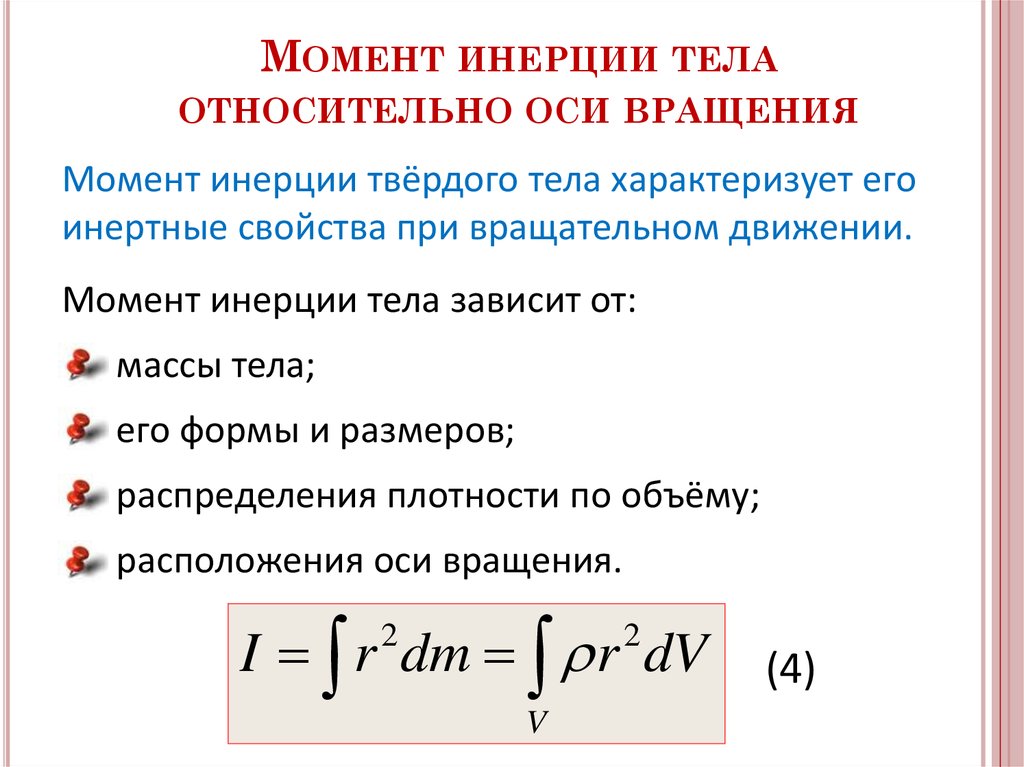
 Автор — делегация ГДР в
Постоянной Комиссии по стандартизации
Автор — делегация ГДР в
Постоянной Комиссии по стандартизации
Инерция — презентация онлайн
Похожие презентации:
Влияния состава и размера зерна аустенита на температуру фазового превращения и физико-механические свойства сплавов
Газовая хроматография
Геофизические исследования скважин
Искусственные алмазы
Трансформаторы тока и напряжения
Транзисторы
Воздушные и кабельные линии электропередач
Создание транспортно-энергетического модуля на основе ядерной энергодвигательной установки мегаваттного класса
Магнитные аномалии
Нанотехнологии
7 класс
С
Название величины Обозначение
Путь
Время
Скорость
Единицы измерения
S
t
Формулы
м
с
м/с
S t
t
S
S
t
1 км = 1000 м, 1 ч =3600 с, 1 мин = 60 с
S в есь
ср
tв сё
Выделение данных в условии
задачи
Пройденный путь-S, единицы
измерения: м, км, см,
дм,мм.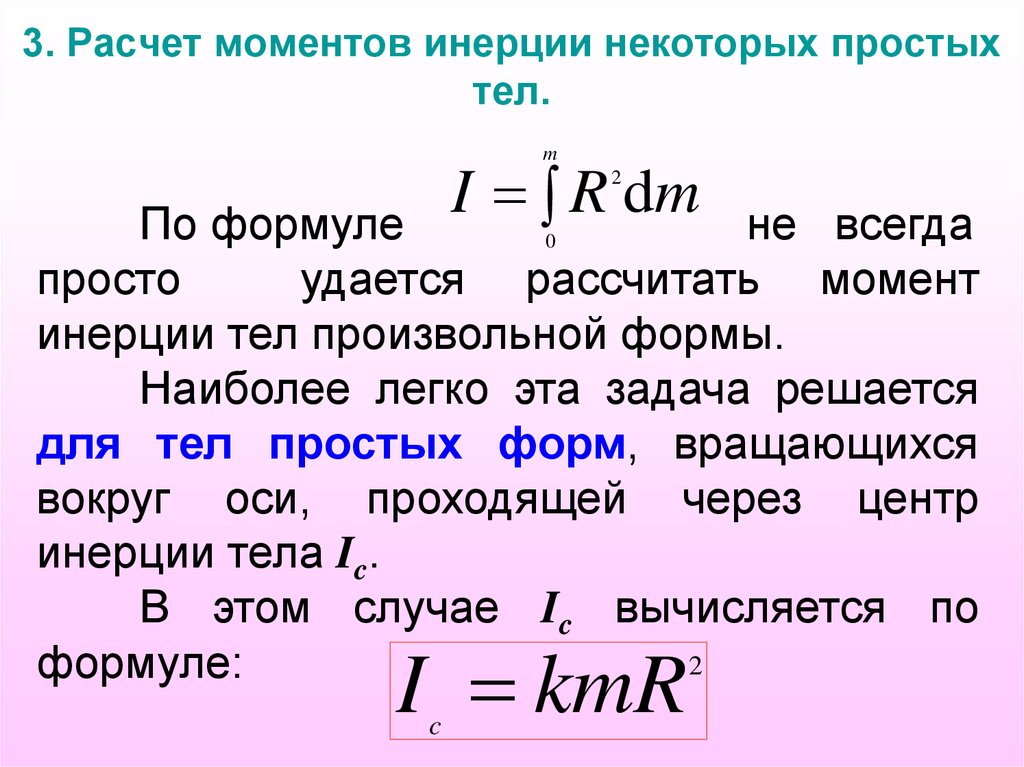 Основная единица
Основная единица
измерения в СИ: м (метр).
Поезд двигаясь равномерно, прошел
путь 18 км за 15 минут. Найти
скорость поезда на данном участке пути.
Скорость –U, единицы
измерения:м/с,км/ч,
см/с,см/мин. Основная
единица измерения в СИ:
м/с (метр в секунду).
Пройденный
путь, S
Время, t
Запись условия и решения задачи
Выделение данных в условии
задачи
Скорость- U,м/с
Автобус движется равномерно со
скоростью
54 км/ч. Найти время
движения автобуса, если он прошел
путь 27 км.
Пройденный путь-S,
м
Время-t, единицы
измерения:час, мин,с.
Основная единица
измерения в СИ: с
(секунда).
Данные
Запись условия
и решения задачи
величины
ДАНО:
необходимо
перевести в
СИ
СИ:
Решение:
27 км = 27·1000 м = 27000 м
S=27 км
U =54 км/ч
t— ?
S=27000 м
U =15 м/с
с
Запишем формулу скорости для
равномерного прямолинейного
движения:
S
время:
U =км/ч=54000 м/Выразим
54
3600 c=
15 м/с
t
S
t=
t=
Вот так просто можно
решать задачи по
физике !
U
Подставим данные
в формулу:
27000 м
= 1800 c
15 м/с
Ответ: t=30 мин
aelita
8.
 Как можно изменить скорость тела?Скорость тела
Как можно изменить скорость тела?Скорость телаизменяется,
если на него
действуют
другие тела!!!
8
9. Как можно изменить направление скорости тела?
Направление скороститела изменяется, если
на него действуют
другие тела!!!
9
10. Как зависит изменение скорости тела от величины действия другого тела?
Чем меньше действие другого тела, темдольше сохраняется скорость движения и
тем ближе движение к равномерному!!!
10
Как будет двигаться тело, если на него
не будут действовать другие тела?
Экспериментально установлено:
Если на тело не действуют другие тела,
то оно находится или в покое,
или движется прямолинейно и равномерно
относительно Земли.
Галилео Галилей
(1564 – 1642)
11
Явление сохранения
скорости тела
при отсутствии действия
на него других тел
называют инерцией
Примеры пользы инерции:
Примеры вреда инерции:
Пуля, выпущенная из ружья, летит по
инерции.
Детская игрушка юла. После
раскручивания человеком она
продолжает крутиться по инерции.
Игра в баскетбол или футбол. Игрок
ударил по мячу. Дальше мяч летит по
инерции.
Автомобиль движется по дороге с
большой скоростью, если внезапно из
кустов наперерез выбегает человек или
животное, то водитель не может
мгновенно затормозить, ведь машина
продолжает двигаться по инерции.
Человек скачет на лошади. Лошадь
резко остановилась, а всадник по
инерции продолжает двигаться вперед.
Он вылетает из седла
Скейт едет прямо, но нужно повернуть,
однако, он будет по инерции двигаться
вперед.
Человек скачет на лошади. Лошадь
резко остановилась, а всадник по
инерции продолжает двигаться вперед.
Он вылетает из седла.
18. Без инерции не было бы многих видов спорта!
19. Именно инерция помогает устанавливать мировые рекорды!
Почемунеобходимо
закреплять
грузы в кузове
грузовика?
Почему
необходимо
пристегиваться
при поездке в
автомобиле?
Тест.
1.Что такое инерция?
Г. Свойство тел сохранять
скорость.
У. Явление сохранения
скорости тела, при отсутствии
действия на него других тел.
В. Изменение скорости тела.
2. Что произойдет с колобком,
если машина резко тронется?
С. Упадет назад.
Д. Упадет вперед.
Е. Останется неподвижным.
3.В каком случае наблюдается
проявление инерции?
А. Камень падает на дно
ущелья.
П. Пыль выбивают из ковра.
Н. Мяч отскочил от стенки
после удара.
• 4. Какая цистерна начинает
движение?
И. 1.
Е. 2.
Ч. 3.
• 5. Поднимаясь вверх на
воздушном шаре, Незнайка
случайно обронил конфету. Как
она будет двигаться?
• К. 1.
• Л. 2.
• Х. 3.
1
2
3
Таблица ответов
1
2
3
4
у
с
п
е
5
х
English Русский Правила
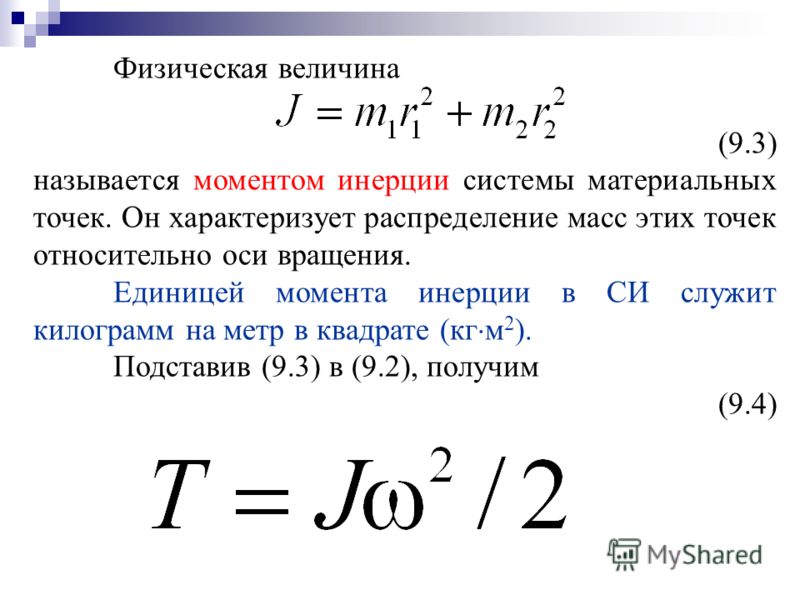
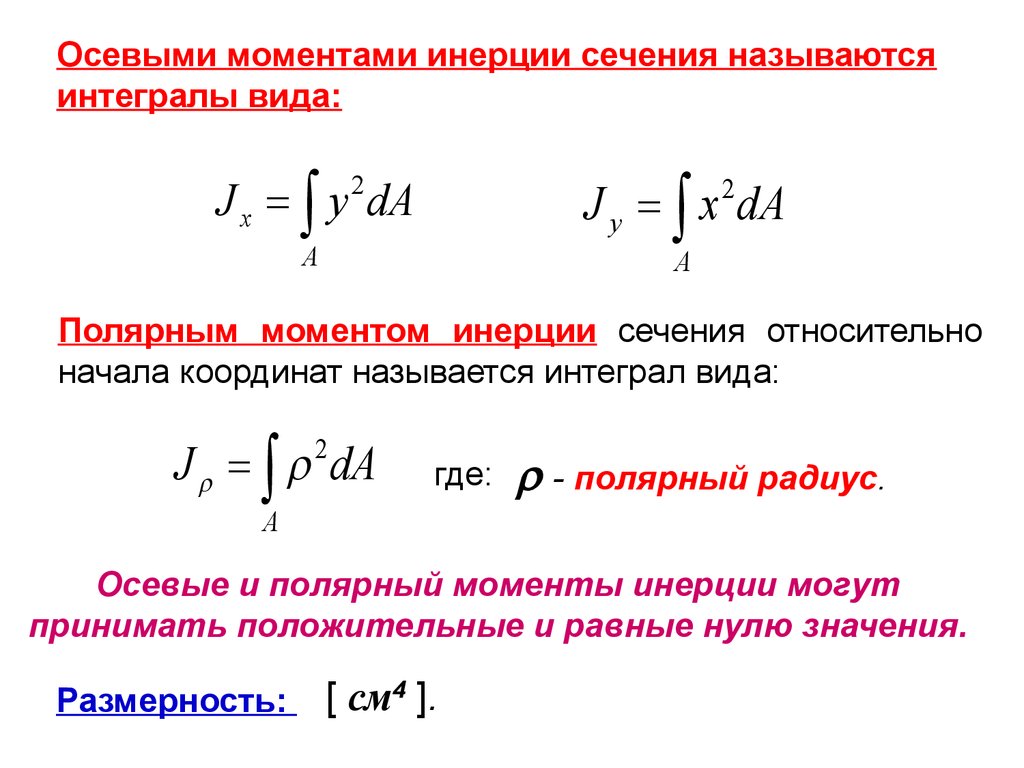
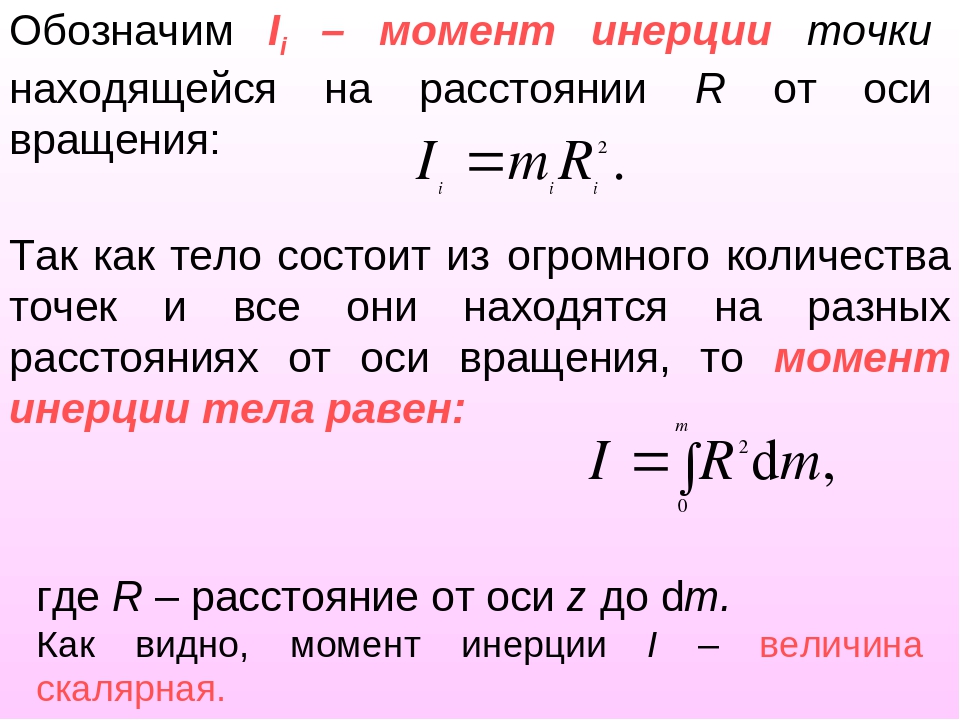
Единица момента инерции
В физике момент инерции используется для получения основного количественного измерения инерции вращения.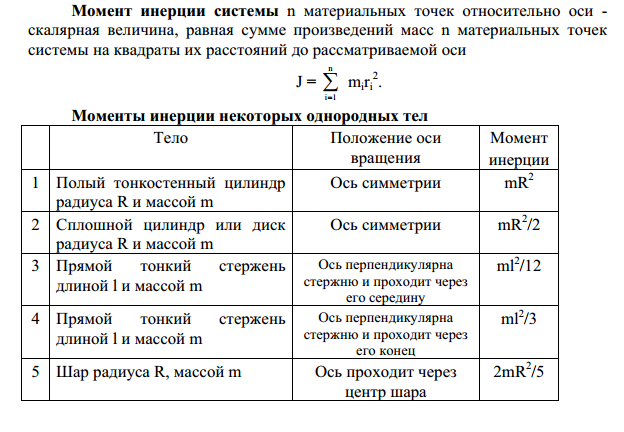 Противоположный акт, проявляемый телом против изменения его вращения вокруг оси (это вращение может быть вызвано как внутренним, так и внешним образом). Он также основан на распределении массы тела конкретно относительно оси вращения. Давайте посмотрим на единицы момента инерции, разницу между единицей момента инерции и единицей момента силы в системе СИ, различные типы единиц инерции и узнаем о единице момента инерции в системе СИ (единица инерции в системе СИ).
Противоположный акт, проявляемый телом против изменения его вращения вокруг оси (это вращение может быть вызвано как внутренним, так и внешним образом). Он также основан на распределении массы тела конкретно относительно оси вращения. Давайте посмотрим на единицы момента инерции, разницу между единицей момента инерции и единицей момента силы в системе СИ, различные типы единиц инерции и узнаем о единице момента инерции в системе СИ (единица инерции в системе СИ).
Единицей момента инерции в СИ является кг м2, где кг — единица массы, а м — единица длины. Между единицей момента инерции и единицей момента силы возникает много путаницы. Единица момента инерции в системе СИ выражается в кг·м2, а единица момента силы – в Нм, где Н – единица силы, м – единица длины.
Читайте также —
- Решения NCERT для 11 класса физики
- NCERT Solutions для 12 класса физики
- Решения NCERT для всех субъектов
Момент инерции Определение:
Момент инерции кого-либо или объекта рассматривается как экстенсивное свойство или аддитивное свойство этого тела.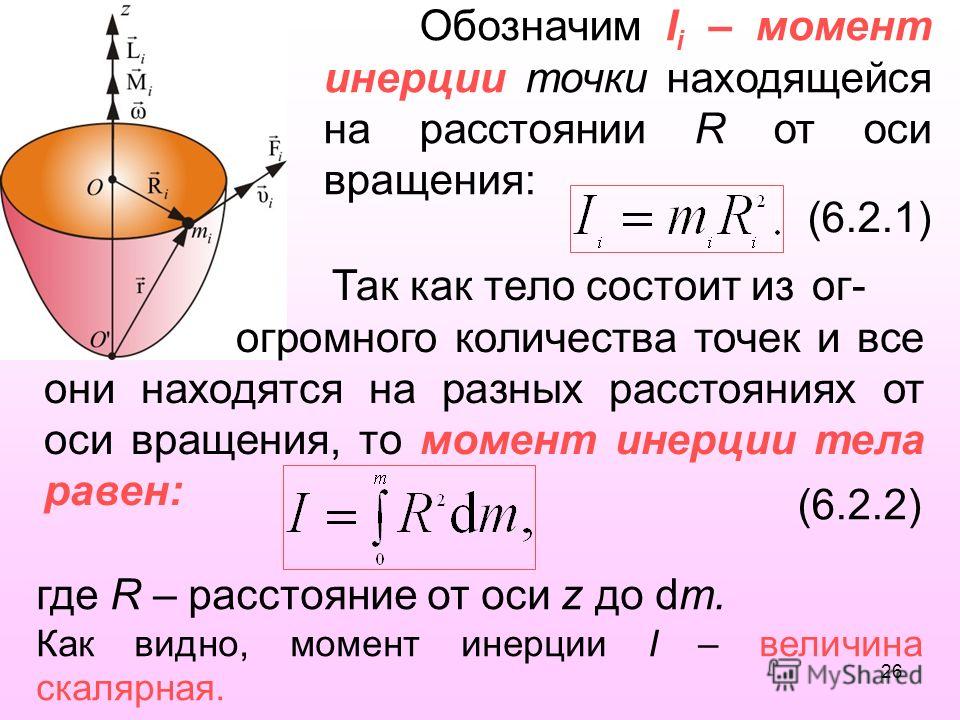 Определение момента инерции дается как произведение массы сечения на квадрат расстояния между центром тяжести сечения и базовой осью. Он также дает отношение полного углового момента объекта к его угловой скорости относительно его главной оси. I =L/ω , I представляет момент инерции, L дает угловой момент, а ω дает угловую скорость. Другими терминами, описывающими момент инерции, являются инерция вращения, момент инерции массы, второй момент массы, угловой момент массы. Он известен как величина, которая может определить крутящий момент, необходимый для желаемого углового ускорения вокруг оси вращения. Для жесткой составной системы момент инерции принимается как сумма всех моментов инерции системы. Величина крутящего момента, необходимая для возникновения углового ускорения, пропорциональна моменту инерции тела.
Определение момента инерции дается как произведение массы сечения на квадрат расстояния между центром тяжести сечения и базовой осью. Он также дает отношение полного углового момента объекта к его угловой скорости относительно его главной оси. I =L/ω , I представляет момент инерции, L дает угловой момент, а ω дает угловую скорость. Другими терминами, описывающими момент инерции, являются инерция вращения, момент инерции массы, второй момент массы, угловой момент массы. Он известен как величина, которая может определить крутящий момент, необходимый для желаемого углового ускорения вокруг оси вращения. Для жесткой составной системы момент инерции принимается как сумма всех моментов инерции системы. Величина крутящего момента, необходимая для возникновения углового ускорения, пропорциональна моменту инерции тела.
Факторы, влияющие на момент инерции:
Момент инерции зависит от некоторых факторов,
- Плотность материала
- Размер и форма тела
- Ось вращения
- NCERT заметки Класс 11 Физика Глава 7 Система частиц и вращательное движение
- Решения NCERT для 11 класса Физика Глава 7 Система частиц и вращательное движение
- NCERT Пример 11 Решения по физике Глава 7 Система частиц и вращательное движение
- NCERT Пример класса 11th Physics Solutions
- .
- NCERT Notes 12-й класс Физика
- NCERT Notes для всех предметов
- Гироскопы: обеспечивают измерение угловой скорости
- Акселерометры: измерение удельной силы/ускорения
- Магнитометры (дополнительно): измерение магнитного поля, окружающего систему
- Потребительский/автомобильный класс
- Промышленный класс
- Тактический класс
- Класс навигации
, Пусть теперь, мы видим, как работает момент инерции для системы частиц и твердых тел.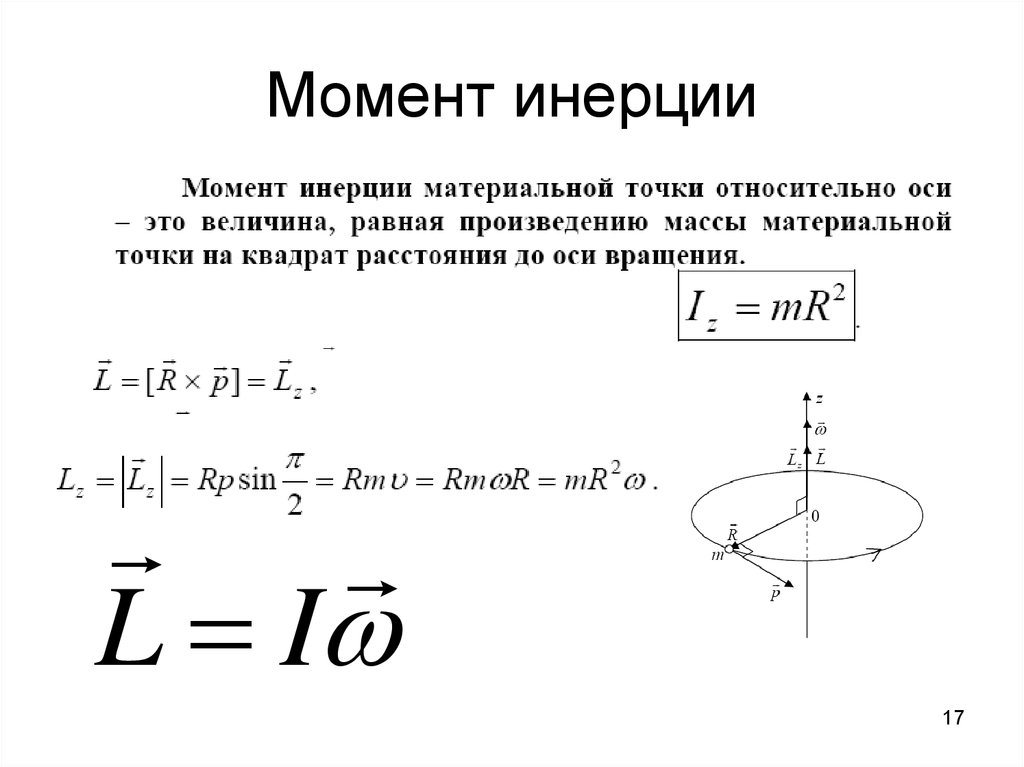
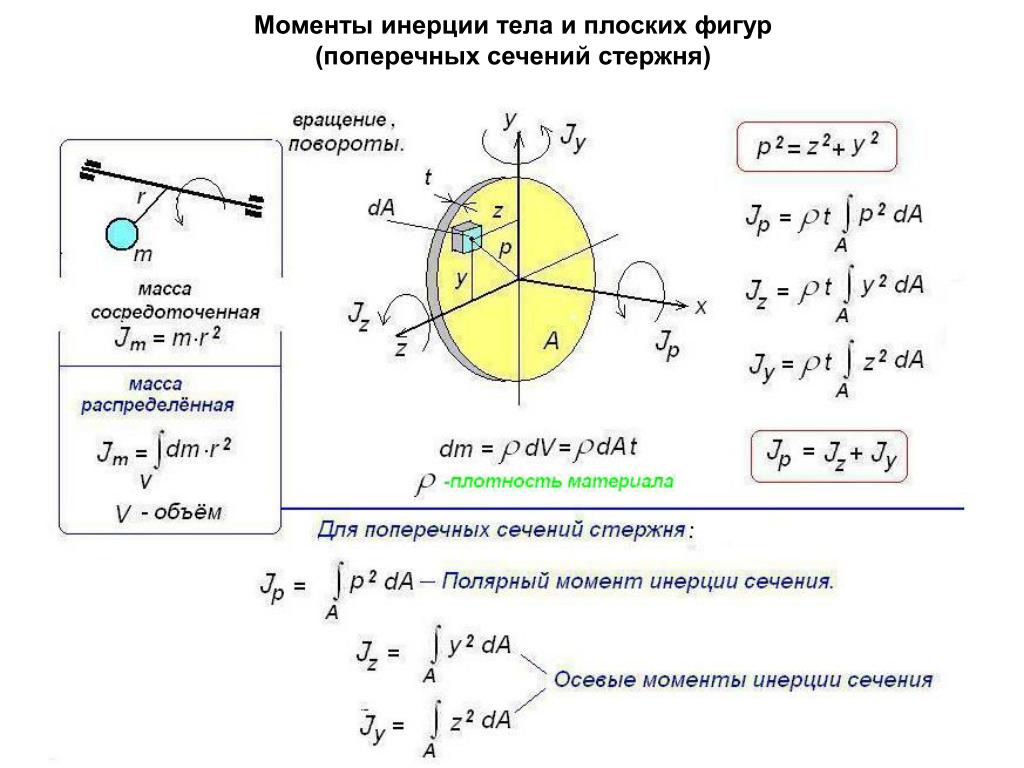
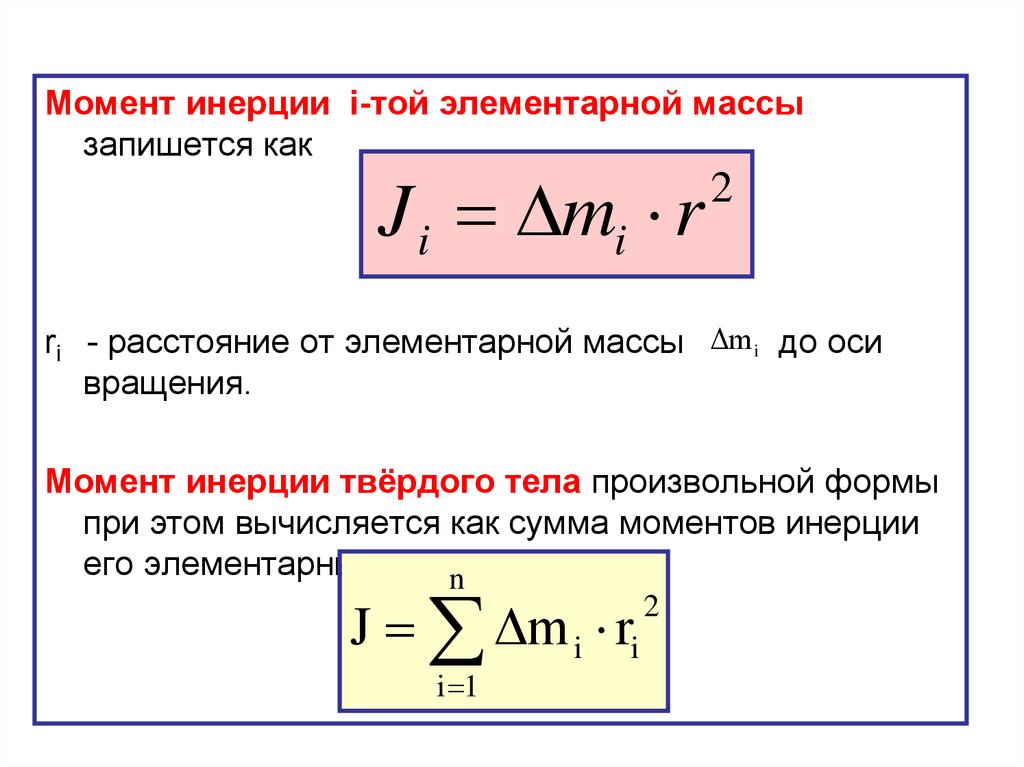
Момент инерции для системы частиц:
Для системы частиц момент инерции можно записать
I=∑m i r i 2
Где r i представляет собой перпендикулярное расстояние между осью и ее частицей, которая содержит массу m i .
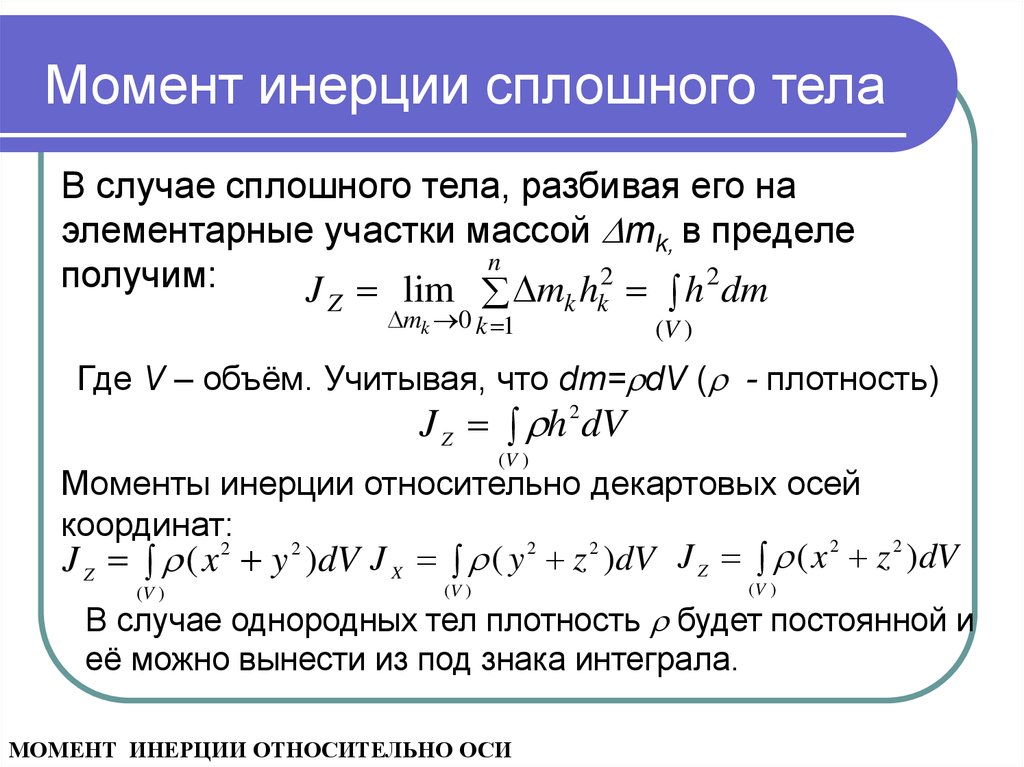
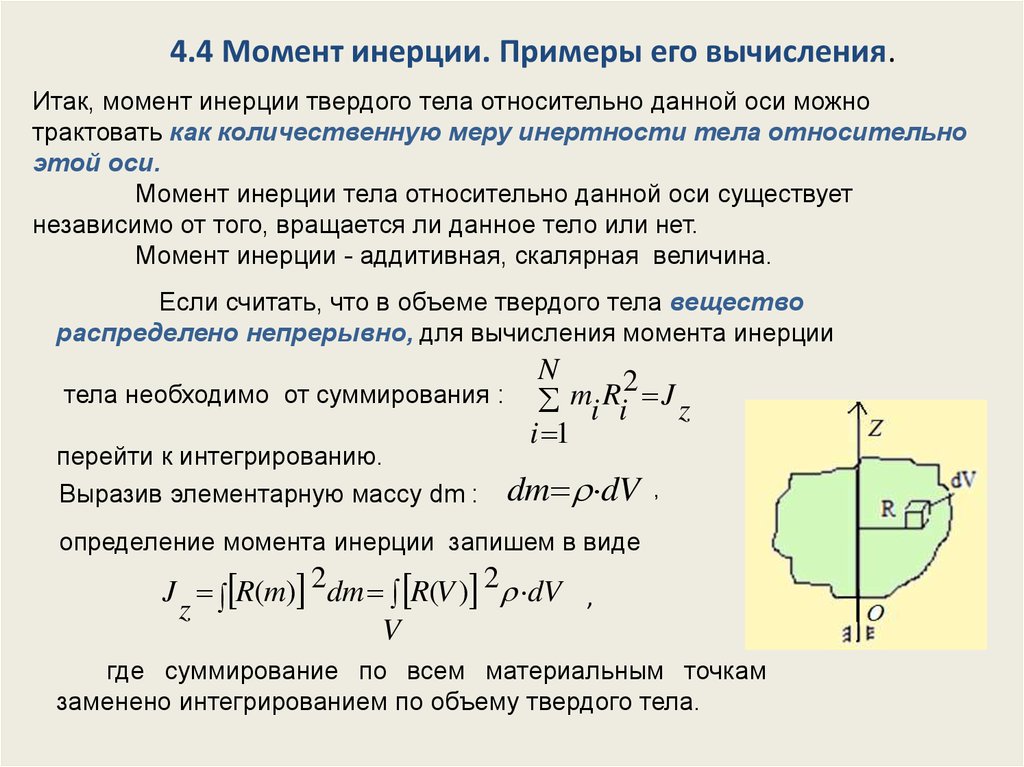
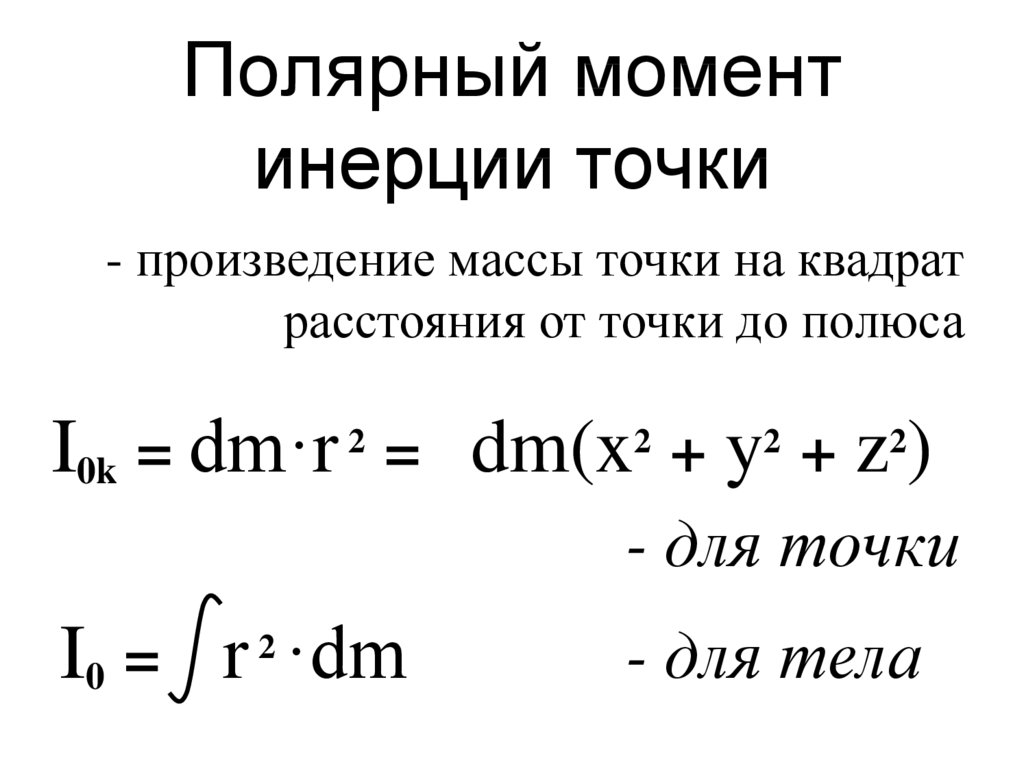
Момент инерции для твердых тел:
Момент инерции для непрерывного распределения массы определяется интегральной формой. Система считается разделенной на бесконечно малый элемент массой dm, а x будет расстоянием между массовым элементом и осью вращения. Момент инерции твердых тел равен
I=∫ r 2 dm
Moment of inertia for different objects:
| Shapes | Moment of inertia | |||
| Solid cylinder or disc with the symmetric Axis | I = 1/2 (MR 2 ) | |||
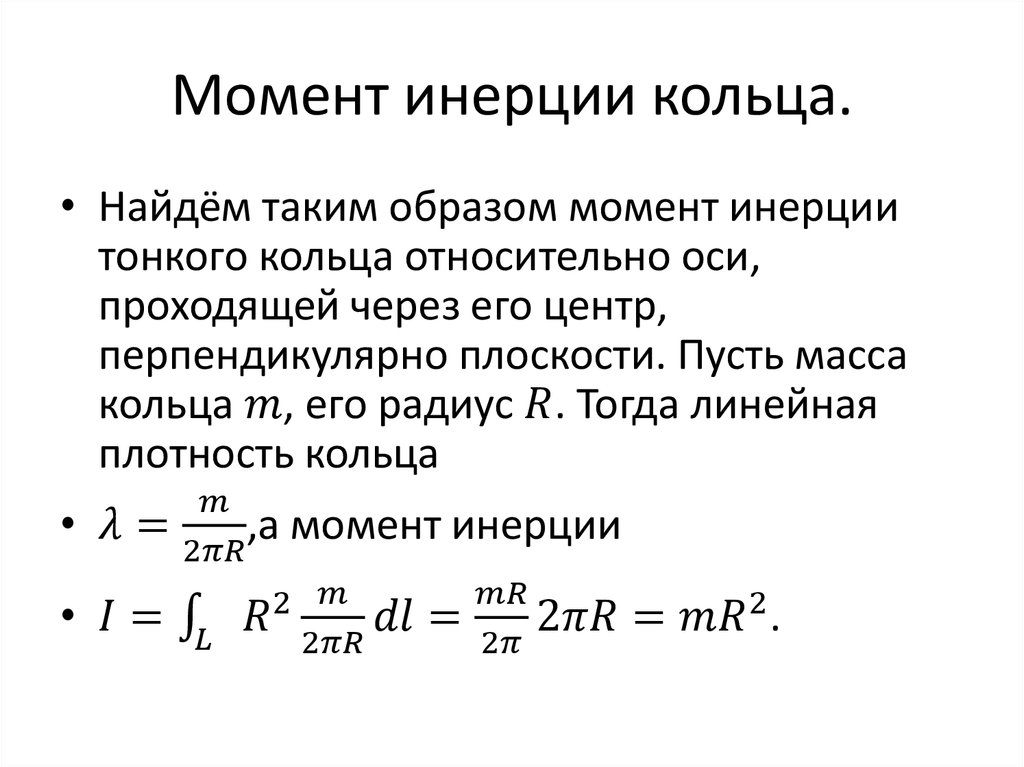
| Обруч с симметричной осью | I = MR 2 | |||
| SOLID SPEARE | I = 2/5 (гр | |||
| SOLID | I = 2/5 (гр | |||
. 2 ) 2 ) | ||||
| Стержень вокруг центра | I = 1/12 (ML 2 ) | |||
| Сплошной цилиндр с центральным диаметром | I = 1/2 (MR 2 90) (105 4 90) MR 2 ) | |||
| Обруч около диаметра | I = 1/2 (MR 2 ) | |||
| Тонкая сферическая раковина | I = 2/3 (MR 2 ) | |||
| I = 2/3. около конца | I = 1/3 (ML 2 ) |
 Они перечислены ниже. указано как кгм 2 или ft.ln.s 2
Они перечислены ниже. указано как кгм 2 или ft.ln.s 2 | Блок | кг.0007 фунт M в 2 | |||
| кг. 2 | 1×10 -7 | 1 | 2.37×10 -6 | 3.42×10 -4 |
| lb m ft 2 | 4.21× 10 -2 | 4.21×10 5 | 1 | 1.44×10 2 |
| lb m in 2 | 2.93×10 -4 | 2.93×10 3 | 6.94×10 -3 | 1 |
для твердых тел, Момент инерции для различных объектов, Единица момента инерции в системе СИ, Другие единицы момента инерции, Преобразование значений между различными единицами момента инерции.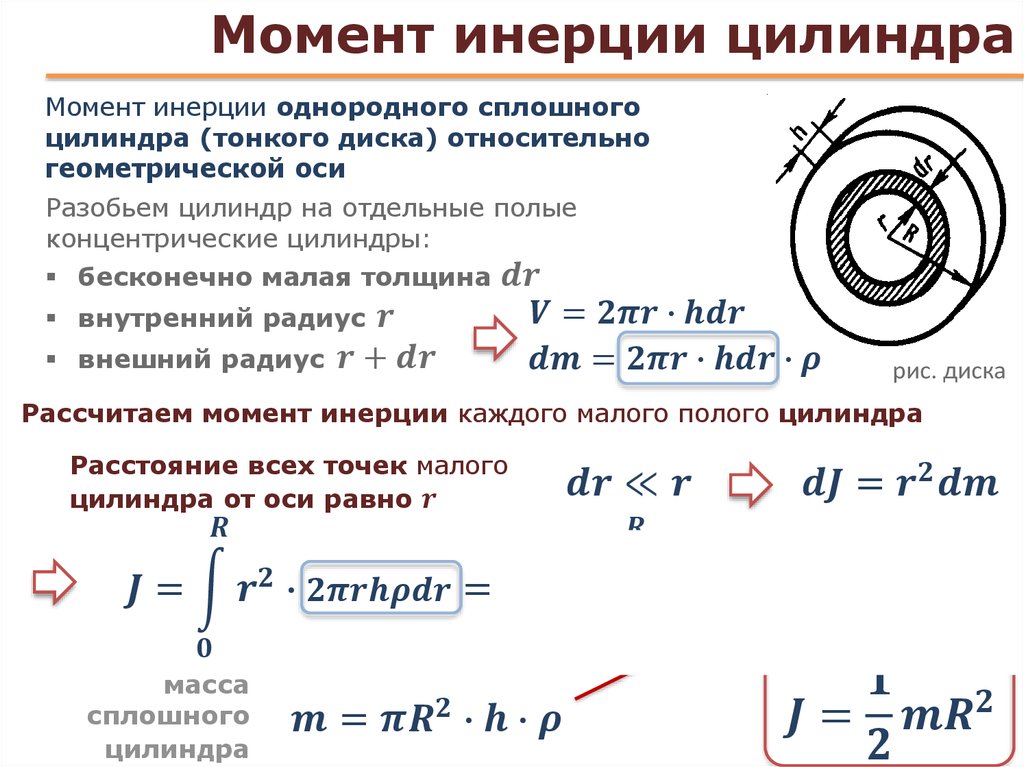 Давайте обсудим некоторые часто задаваемые вопросы и ответы на них, связанные с единицей момента инерции из класса 10, класса 11 и класса 12.
Давайте обсудим некоторые часто задаваемые вопросы и ответы на них, связанные с единицей момента инерции из класса 10, класса 11 и класса 12.
Также проверка-
Часто задаваемые вопросы (FAQ) — единица момента инерции — определение, единица измерения, часто задаваемые вопросы
Вопрос: Преобразовать см4 в мм4?Ответ:
1 см=10 мм
см 4 =10 4 мм 4
8 Преобразовать в м04 Вопрос: 400078 мм?Ответ:
1 мм = 10 -3 M
мм 4 = 10 -12 M 4
Вопрос: Каков момент для неэнергетических бод??Ответ:
Момент инерции для непрерывного распределения массы определяется интегральной формой. Система считается разделенной на бесконечно малый элемент массой dm, а x будет расстоянием между массовым элементом и осью вращения. Момент инерции твердых тел определяется как
Система считается разделенной на бесконечно малый элемент массой dm, а x будет расстоянием между массовым элементом и осью вращения. Момент инерции твердых тел определяется как
I=∫ r 2 дм
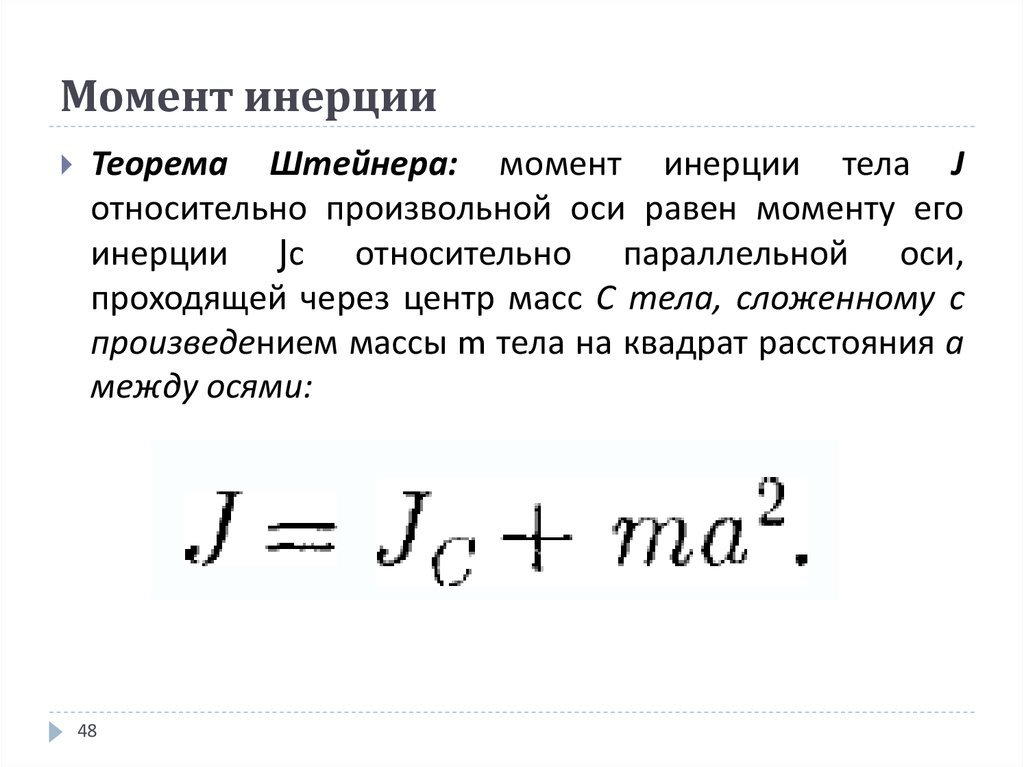
Вопрос: Приведите размерную формулу для единицы момента инерции.Ответ:
Размерная формула для единицы момента инерции дается как M 1 Л 2 Т 0 .
Вопрос: Укажите единицу измерения момента силы в системе СИ.Ответ:
Между единицей момента инерции и единицей момента силы возникает много путаницы. Единица СИ момента инерции задается как кг м 2 , тогда как единица момента силы — Нм, где Н — единица силы, м — единица длины.
Вопрос: Какова единица момента инерции в системе мкс?Ответ:
Единица момента инерции в СИ и единица момента инерции в системе МКС совершенно одинаковы. Момент инерции в системе МКС определяется как kgm 2 .
Момент инерции в системе МКС определяется как kgm 2 .
Ответ:
Момент инерции представлен символом или буквой «I».
Вопрос: Что такое единица момента инерции или что такое единица инерции в системе СИ?Ответ:
Момент инерции является произведением массы сечения на квадрат расстояния между центром тяжести сечения и базовой осью. Единицей момента инерции в системе СИ является кг·м 2 , тогда как единицей момента силы является Нм, где Н – единица силы, м – единица длины.
Вопрос: Что такое Единица измерения момента инерции?Ответ:
Единицей измерения момента инерции является кгм 2
Статьи по инерциальной навигации
Инерциальный измерительный блок (IMU) — это устройство, которое обычно состоит из гироскопов для измерения и сообщения угловой скорости и акселерометров для измерения и сообщения удельной силы.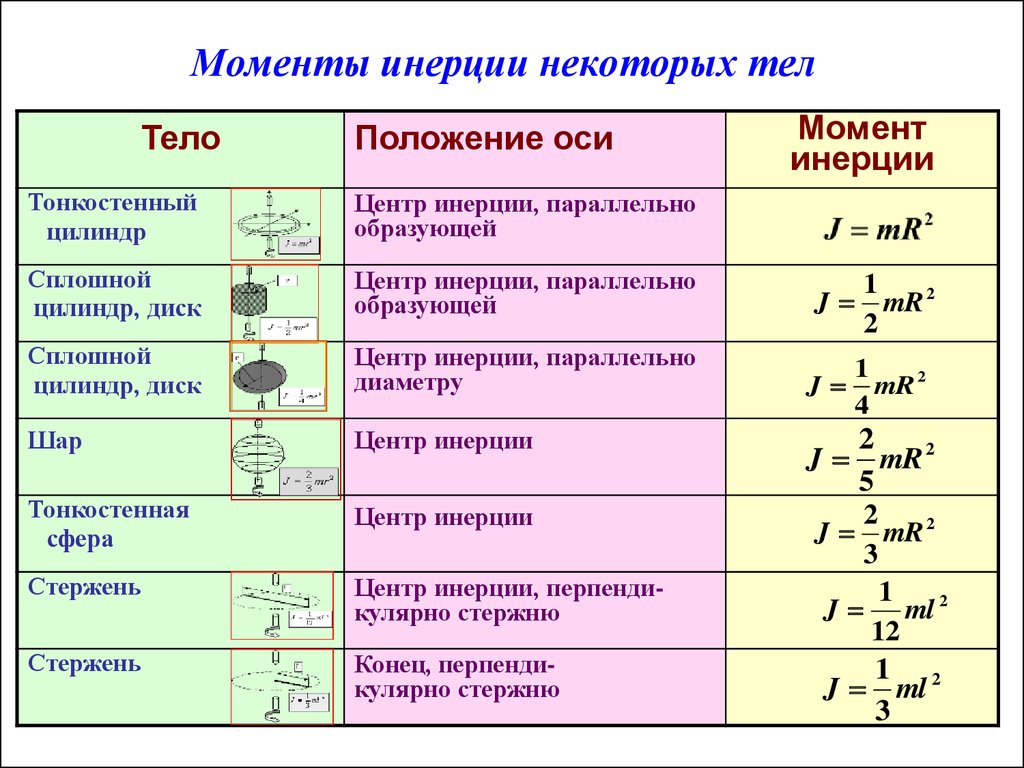 В этом разделе мы углубимся во внутреннюю работу инерциального измерительного блока, чтобы изучить все соответствующие спецификации и информацию, необходимую для выбора правильного IMU для вашего приложения.
В этом разделе мы углубимся во внутреннюю работу инерциального измерительного блока, чтобы изучить все соответствующие спецификации и информацию, необходимую для выбора правильного IMU для вашего приложения.
Что такое IMU?
Инерциальный измерительный блок (IMU) — это устройство, которое может измерять и сообщать удельный вес и угловую скорость объекта, к которому оно прикреплено. IMU обычно состоит из:
В результате добавления магнитометра и алгоритмов фильтрации для определения информации об ориентации появилось устройство, известное как система ориентации и направления (AHRS). Вы можете узнать больше о том, как работает AHRS, в разделе 1.6 Учебника по инерциальной навигации.
Автор ArnoldReinhold — собственная работа, CC BY-SA 4. 0, https://commons.wikimedia.org/w/index.php?curid=82248569
0, https://commons.wikimedia.org/w/index.php?curid=82248569
IMU доступны в нескольких классах производительности. Они делятся на одну из четырех категорий в зависимости от характеристик акселерометра и гироскопа:
Эти категории производительности обычно определяются на основе стабильности смещения датчика во время движения, поскольку стабильность смещения во время движения играет очень большую роль в определении характеристик инерциальной навигации. В таблице ниже представлена сводная информация о производительности различные сорта для этих спецификаций.
| МАРКА | СТОИМОСТЬ | СТАБИЛЬНОСТЬ ГИРОСТАБИЛЬНОСТИ ПРИ РАБОТЕ | ВРЕМЯ НАВИГАЦИИ ОТКАЗА GNSS | ПРИЛОЖЕНИЯ |
|---|---|---|---|---|
| Потребитель | <\$10 | — | — | Смартфоны |
| Промышленный | \$100-\$1000 | <10°/час | <1 \минута | БПЛА |
| Тактический | \$5,000-\$50,000 | <1°/час | <10 \минут | Умные боеприпасы |
| Навигация | <\$100,000 | <0,1°/час | Несколько часов | Военный |
VectorNav предлагает два класса IMU, основанных на акселерометрах и гироскопах MEMS.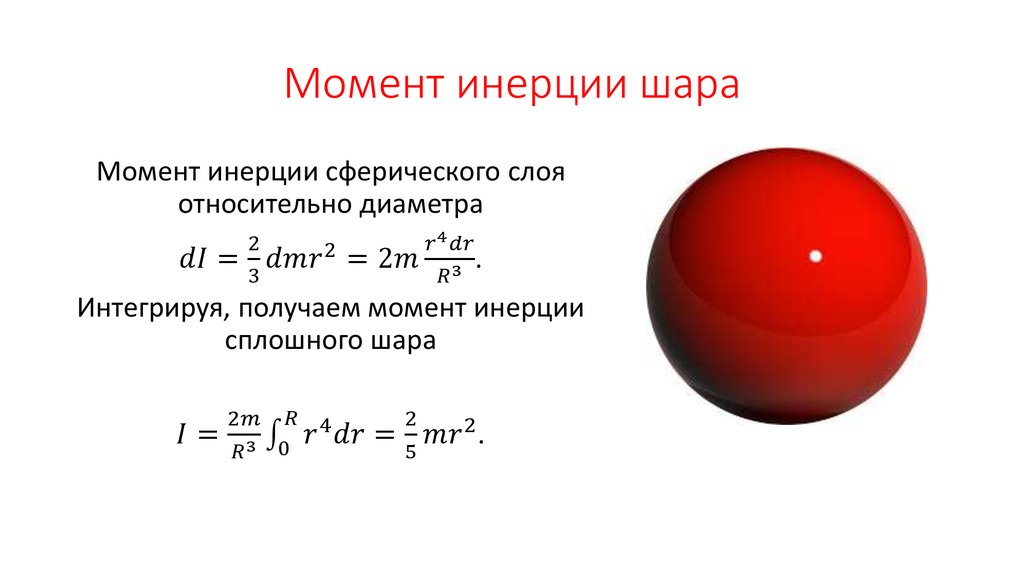 Ниже представлена таблица, иллюстрирующая разницу между прибором промышленного класса ВН-100 и прибором тактического класса ВН-110.
Ниже представлена таблица, иллюстрирующая разницу между прибором промышленного класса ВН-100 и прибором тактического класса ВН-110.
ВН-100 | ВН-110 |
|---|---|
Давайте углубимся в конкретные датчики, используемые в IMU, а именно акселерометр и гироскоп.
АКСЕЛЕРОМЕТР Акселерометр — это основной датчик, отвечающий за измерение инерционного ускорения или изменения скорости с течением времени. Он бывает различных типов, включая механические акселерометры, кварцевые акселерометры и акселерометры МЭМС.
Акселерометр MEMS, по сути, представляет собой груз, подвешенный на пружине, как показано на рис. 2. Масса известна как контрольная масса, а направление, в котором масса может двигаться, называется осью чувствительности.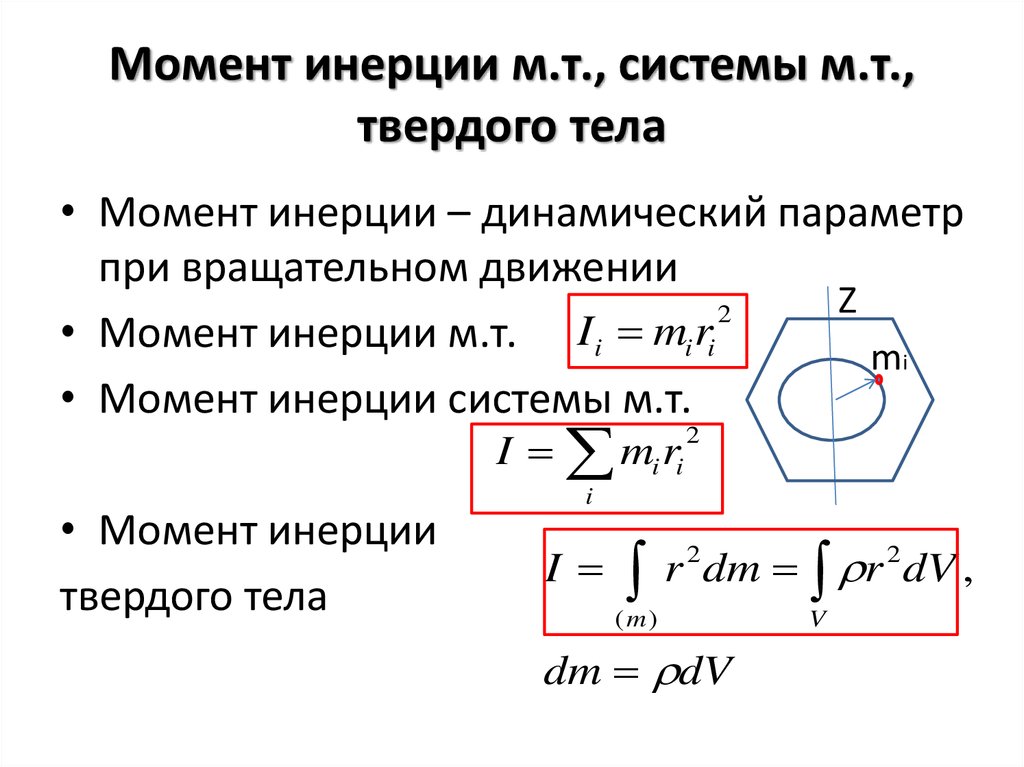 Когда акселерометр подвергается
к линейному ускорению вдоль оси чувствительности ускорение вызывает смещение контрольной массы в одну сторону с величиной отклонения, пропорциональной ускорению.
Когда акселерометр подвергается
к линейному ускорению вдоль оси чувствительности ускорение вызывает смещение контрольной массы в одну сторону с величиной отклонения, пропорциональной ускорению.
Чтобы узнать больше о работе акселерометра MEMS, см. Раздел 1.3 или чтобы понять различные характеристики, связанные с выбором подходящий акселерометр для вашего приложения см. в Разделе 3.1 Учебника по инерциальной навигации VectorNav.
ГИРОСКОП
Гироскоп — это инерциальный датчик, измеряющий угловую скорость объекта относительно инерциальной системы отсчета. На рынке доступно множество различных типов гироскопов, которые варьируются в зависимости от уровня производительности и включают в себя механические
гироскопы, волоконно-оптические гироскопы (ВОГ), кольцевые лазерные гироскопы (КЛГ) и кварцевые/МЭМС-гироскопы. Кварцевые и МЭМС-гироскопы обычно используются на рынках потребительского, промышленного и тактического уровня, в то время как волоконно-оптические гироскопы охватывают
все четыре категории производительности.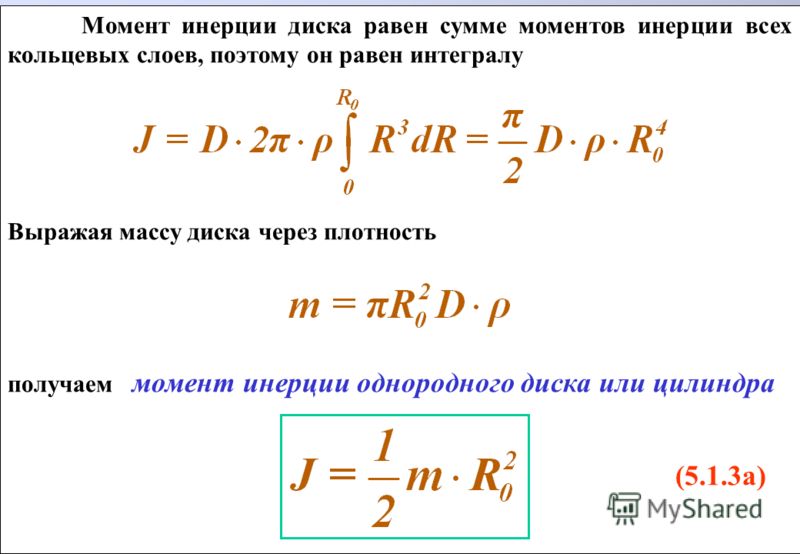 Кольцевые лазерные гироскопы обычно имеют стабильность смещения во время движения в диапазоне от 1 ° / час до менее 0,001 ° / час, включая тактические и навигационные классы. Механические гироскопы
составляют самые высокопроизводительные гироскопы, доступные на рынке, и могут достигать стабильности смещения во время работы менее 0,0001 °/час.
Кольцевые лазерные гироскопы обычно имеют стабильность смещения во время движения в диапазоне от 1 ° / час до менее 0,001 ° / час, включая тактические и навигационные классы. Механические гироскопы
составляют самые высокопроизводительные гироскопы, доступные на рынке, и могут достигать стабильности смещения во время работы менее 0,0001 °/час.
Чтобы узнать больше о работе МЭМС-гироскопа, см. подходящий акселерометр для вашего приложения, см. Раздел 3.1 Учебника по инерциальной навигации VectorNav.
МАГНИТОМЕТР Магнитометр — это тип датчика, который измеряет силу и направление магнитного поля. Хотя существует множество различных типов магнитометров, большинство магнитометров MEMS полагаются на магнитосопротивление для измерения окружающего магнитного поля. Магниторезистивный
магнитометры состоят из пермаллоев, которые изменяют сопротивление из-за изменений в магнитных полях.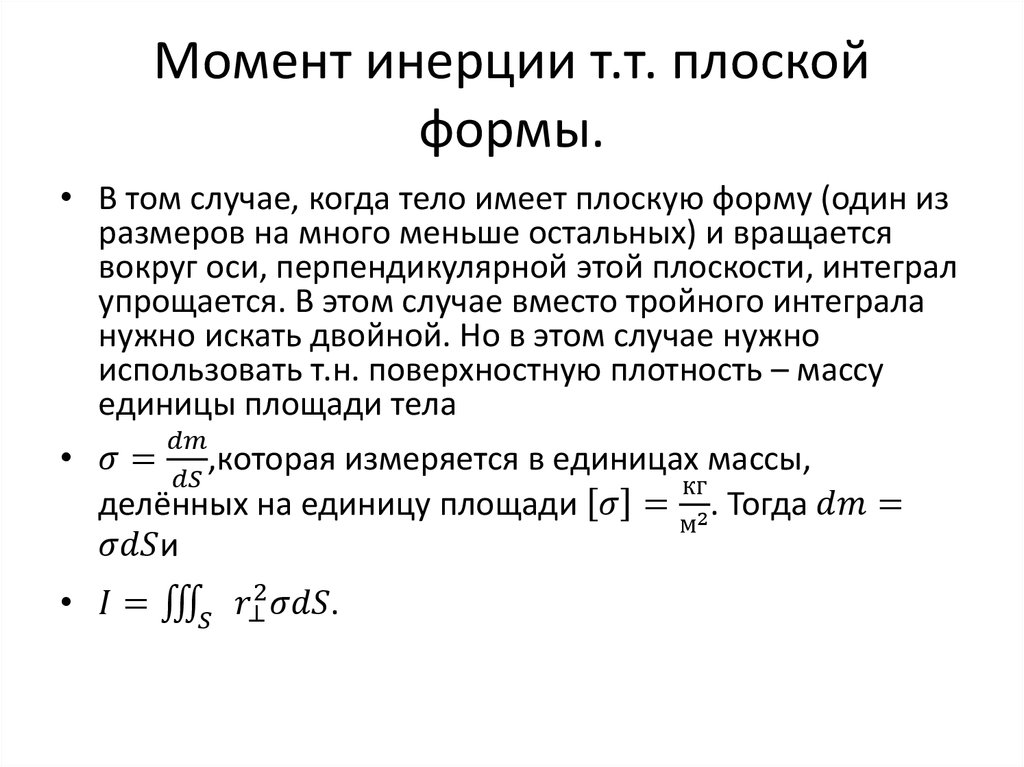 Как правило, магнитометры MEMS используются для измерения локального магнитного поля, которое состоит из комбинации магнитного поля Земли, а также любого другого магнитного поля.
поля, создаваемые близлежащими объектами.
Как правило, магнитометры MEMS используются для измерения локального магнитного поля, которое состоит из комбинации магнитного поля Земли, а также любого другого магнитного поля.
поля, создаваемые близлежащими объектами.
Как работает инерциальный измерительный блок (IMU)?
Отдельный инерциальный датчик может воспринимать измерения только вдоль или вокруг одной оси. Чтобы обеспечить трехмерное решение, три отдельных инерциальных датчика должны быть установлены вместе в ортогональный кластер, известный как триада. Этот набор инерционных
Датчики, установленные в триаду, обычно называют 3-осевыми инерционными датчиками, поскольку датчик может обеспечивать одно измерение по каждой из трех осей. Аналогично, инерциальная система, состоящая из 3-х осевого акселерометра и 3-х осевого гироскопа, называется
в качестве 6-осевой системы, поскольку она обеспечивает два разных измерения по каждой из трех осей, что в сумме дает шесть измерений.