
Индуктивные датчики положения (приближения) – ТА
Индуктивные бесконтактные датчики приближения наиболее широко используются в качестве конечных выключателей в станках с ЧПУ на автоматических линиях и другом автоматизированном оборудовании. Они также применяются в системах управления технологическими процессами, где, как правило, выполняют функции датчиков обратной связи, сигнализируя о завершении выполнения конкретным элементом оборудования команды на перемещение в определенное положение.
Применение индуктивных датчиков оправдано в ответственных системах, где важна надежная работа оборудования, поскольку они намного надежнее изделий с микропереключателями и герконами.
Для выбора датчиков по параметрам воспользуйтесь фильтрами слева.
Принцип действия
Индуктивные датчики положения объектов имеют чувствительный элемент в виде катушки индуктивности с открытым в сторону активной поверхности магнитопроводом. Перед активной поверхностью датчика образуется электромагнитное поле.
Перед активной поверхностью датчика образуется электромагнитное поле.
При внесении металлического объекта в это поле, колебания генератора затухают, демодулированное напряжение падает, триггер срабатывает, коммутационный элемент переключается, давая сигнал в систему управления о наличии объекта в зоне контроля.
Расстояние срабатывания и объект воздействия
В технических параметрах индуктивных бесконтактных датчиков указываются их номинальные (условные) расстояния срабатывания Sn. Они не учитывают допуски при изготовлении датчиков или отклонения, обусловленные внешними факторами (напряжение питания и температура), и могут отличаться от реальных расстояний срабатывания Sr.
При определении реальных расстояний срабатывания Sr используется стандартный объект воздействия из металла (квадратная пластина из Ст 3 толщиной 1 мм, со стороной, равной 3Sn или диаметру чувствительной поверхности). При работе с объектами из других металлов и сплавов, а также если объект воздействия имеет размеры меньше стандартного, расстояния срабатывания могут уменьшаться (при расчетах необходимо применять поправочные коэффициенты K).
При работе с объектами из других металлов и сплавов, а также если объект воздействия имеет размеры меньше стандартного, расстояния срабатывания могут уменьшаться (при расчетах необходимо применять поправочные коэффициенты K).
Для предварительных расчетов можно использовать следующие поправочные коэффициенты материала объекта воздействия:
- нержавеющая сталь: K=0,8
- нихром: K=0,9
- латунь: K=0,5
- алюминий: K=0,5
- медь: K=0,48
Выделяются также группы датчиков с поправочным коэффициентом K=1 (расстояние срабатывания не зависит от типа используемого металла) и с поправочным коэффициентом K=0 (срабатывание только на железо).
Обычно на практике объект воздействия изготавливается в виде стальной пластины требуемых размеров, соединенной с движущейся деталью механизма, положение которой нужно контролировать.
Для надежного и однозначного переключения индуктивного датчика его расстояние срабатывания и расстояние отпускания при обратном ходе объекта делаются разными (разность расстояний определяется параметром «дифференциальный ход»).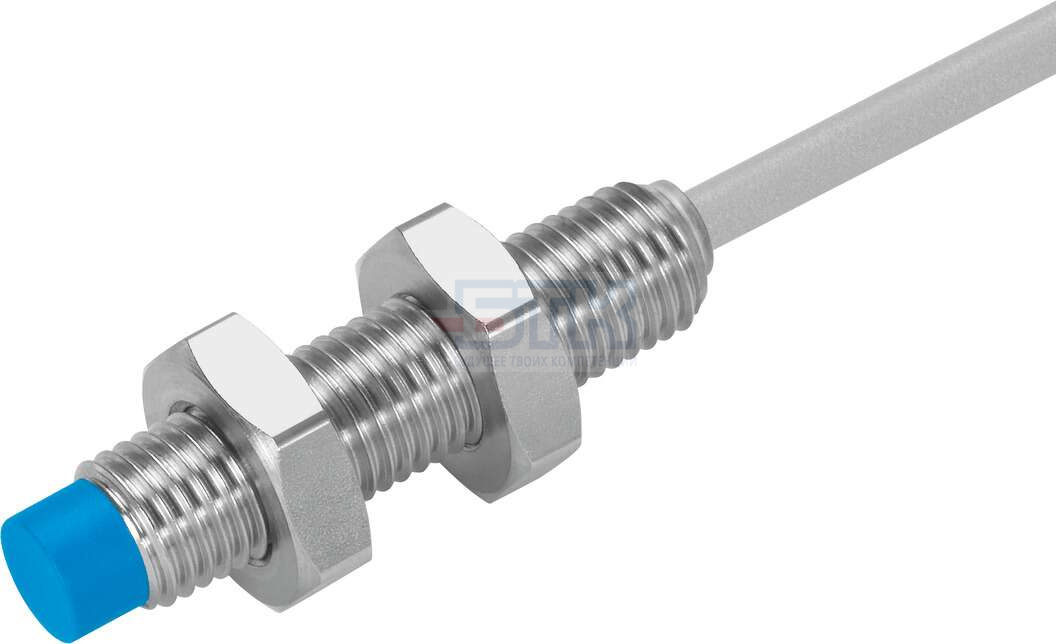
Мифы об индуктивных датчиках положения. Марк Смит, Microchip Technology
Индуктивные датчики положения измеряют индуктивность.
Индуктивные датчики не измеряют индуктивность. Работа этих устройств основана на взаимодействии магнитного поля катушки датчика и металла, который входит в состав объекта. Для точного определения возмущений в магнитном поле, вызванных этим объектом, используются хорошо известные свойства трансформатора с воздушным сердечником и закон Фарадея. Проще говоря, индуктивные датчики измеряют возмущение магнитного поля, обусловленное проводящим объектом (см. рис. 1).
Рис. 1. Образец индуктивного датчика положения
Магнитное поле генерируется не постоянным магнитом, который применяется в датчиках Холла и магниторезистивных датчиках, а первичной обмоткой трансформатора. Две вторичные обмотки используются для детектирования этого поля. Металлический объект, помещенный в магнитное поле, индуцирует вихревые токи, которые противодействуют полю.
Точность определения положения с помощью индуктивных датчиков невысока.
Это в корне неверное утверждение, т.к. индуктивные датчики положения работают с очень высокой точностью и при высоких рабочих температурах превосходят другие магнитные датчики, применение которых в таких случаях затруднено. Показания индуктивных датчиков положения не зависят от нелинейных свойств постоянного магнита – они фиксируют только возмущение в генерируемом ими магнитном поле. Погрешность их измерения не превышает ±0,1% во всем диапазоне измерения при комнатной температуре. Погрешность не превышает ±0,3% при более высоких температурах и изменениях воздушного зазора между объектом и датчиком.
Кроме того, для устранения вариаций температуры или минимизации этого эффекта применяется полноценный алгоритм. Например, индуктивный датчик положения возбуждает магнитное поле на частоте 1–6 МГц, используя для этого LC-генератор. Оба параметра могут меняться в зависимости от температуры, но это не влияет на точность определения положения. Дело в том, что приемные каналы вторичной обмотки используют синхронную демодуляцию (см. рис. 2),
Например, индуктивный датчик положения возбуждает магнитное поле на частоте 1–6 МГц, используя для этого LC-генератор. Оба параметра могут меняться в зависимости от температуры, но это не влияет на точность определения положения. Дело в том, что приемные каналы вторичной обмотки используют синхронную демодуляцию (см. рис. 2),
Рис. 2. Схема синхронного демодулятора
причем демодулятор управляется осциллятором первичной стороны. Этот дрейф не влияет на амплитуду принимаемых сигналов. В то же время металлические объекты, находящиеся рядом с датчиком, могут влиять на магнитное поле. В таких случаях требуется калибровка, которая, однако, не учитывает изменений температуры. Для устранения погрешностей вычислений и дискретизации применяются 13-бит АЦП и 32-бит процессоры, обеспечивающие 12-бит разрешение на выходе в измеряемом диапазоне.
У индуктивных датчиков положения – высокая цена
Высокая эффективность индуктивных датчиков сочетается с разумной стоимостью. Если датчикам Холла и магниторезистивным датчикам требуется постоянный магнит для обеспечения достаточно хорошей точности, то индуктивным датчикам необходимо только, чтобы объект был металлическим, благодаря чему пользователь может сэкономить на цене магнита. И хотя площадь платы индуктивного датчика больше за счет его проводников, ее стоимость существенно ниже стоимости постоянного магнита. Таким образом, индуктивный датчик положения – более экономичное решение, чем приложения с датчиком Холла или магниторезистивным датчиком благодаря тому, что магнитное поле измеряется без помощи магнита.
Если датчикам Холла и магниторезистивным датчикам требуется постоянный магнит для обеспечения достаточно хорошей точности, то индуктивным датчикам необходимо только, чтобы объект был металлическим, благодаря чему пользователь может сэкономить на цене магнита. И хотя площадь платы индуктивного датчика больше за счет его проводников, ее стоимость существенно ниже стоимости постоянного магнита. Таким образом, индуктивный датчик положения – более экономичное решение, чем приложения с датчиком Холла или магниторезистивным датчиком благодаря тому, что магнитное поле измеряется без помощи магнита.
Индуктивные датчики положения чувствительны к внешнему магнитному полю.
Современные автоматические устройства генерируют еще больше паразитных магнитных полей, чем прежде, которые вызывают проблемы с использованием датчиков Холла и магнитных датчиков. В индуктивных датчиках положения применяется активная демодуляция для борьбы с этими паразитными полями.
Величина потребляемого тока электромобилями следующего поколения достигает нескольких сотен ампер (см. рис. 3).
рис. 3).
Рис. 3. При работе мотора и протекании большого тока генерируются паразитные магнитные поля высокой напряженности
Кроме того, большинство электромобилей оснащено более чем тремя бесщеточными электродвигателями постоянного тока (BLDC), электронными гидроусилителями руля и системами помощи при торможении. Все эти системы генерируют паразитное магнитное поле. Поскольку у него высокая скорость нарастания, ужесточаются требования к проведению испытаний на помехоустойчивость. В соответствии с действующими стандартами автомобильная электроника при прохождении испытаний на электромагнитную совместимость подвергается воздействию поля постоянного тока величиной 4 мТл, и потому ложные показания датчиков недопустимы.
Преимущество индуктивных датчиков положения в том, что они устойчивы к этим помехам благодаря активной фильтрации только той частоты, которая требуется для измерений. Поскольку в этих датчиках не используются магнитные материалы, данные устройства не подвержены влиянию магнитного поля постоянного тока.
Измерение положения с помощью индуктивных датчиков – новая технология.
В индуктивных датчиках положения проводники печатной платы используются для определения положения объекта, а объектом измерения является металлический предмет. На самом деле, эта технология давно является общепринятой – лишь изменился способ измерения. Принцип работы линейного дифференциального трансформатора напряжения (LVDT) очень схож с принципом измерений индуктивного датчика положения. В этом трансформаторе первичная обмотка и две вторичные обмотки определяют положение металлической рукоятки в робототехнических приложениях. В индуктивных датчиках положения применяются во многом схожие методы, которые к тому же позволяют разместить проводники катушки на печатной плате.
В магнитных вращающихся трансформаторах, представляющих собой разновидность LVDT-трансформатора, применяются те же методы. И в этом случае не трансформатор определяет положение металлического объекта, а индуктивный датчик с помощью проводников печатной платы. Для определения координат все три названных устройства измеряют соотношение между двумя напряжениями, индуцированными возмущенным магнитным полем проводящего элемента.
Из-за дублирующего датчика объем занимаемого пространства удваивается.
Критически важным автомобильным и промышленным приложениям часто необходима избыточность для обеспечения самого высокого уровня безопасности. Благодаря оптимизации слоев печатной платы и некоторым инновационным методам создания первичной обмотки сдвоенному датчику не требуется в два раза больше места на печатной плате по сравнению с одинарным устройством (см. рис. 4).
Рис. 4. Решение с двумя датчиками
Два гальванически изолированных датчика, свободно связанных с полем, совместно измеряют величину одного и того же магнитного поля. Вторичные обмотки соединены с двумя микросхемами, с которых поступают два независимых сигнала о положении объекта, что повышает безопасность приложения.
Вторичные обмотки соединены с двумя микросхемами, с которых поступают два независимых сигнала о положении объекта, что повышает безопасность приложения.
Индуктивные датчики положения измеряют только небольшие линейные перемещения.
Индуктивные датчики положения могут измерять линейные перемещения в достаточно широком диапазоне. Наилучшая точность достигается в тех случаях, когда длина датчика сопоставима с диапазоном измерений; при этом выходное разрешение может масштабироваться даже при измерении минимального расстояния. Длина датчика варьируется в диапазоне 5–600 мм и выше. Любые ограничения по длине должны соотноситься со способностью осциллятора генерировать корректный сигнал для резонансного LC-контура. Во всех случаях применяется один и тот же принцип работы: определяются изменения генерируемого магнитного поля.
Измерение линейных перемещений – заметное преимущество этой технологии, а требуемая чувствительность достигается с помощью единого принципа измерения во многих используемых на практике диапазонах. В то же время для выполнения аналогичной задачи может потребоваться несколько мультиплексированных датчиков Холла, чтобы магнит перемещался из одного положения в другое. Перекрестное управление таким мультиплексированием достаточно сложное, а на результаты измерения может влиять изменение температуры. Индуктивный датчик не имеет таких недостатков и измеряет линейные перемещения в соответствии с требованиями приложений.
В то же время для выполнения аналогичной задачи может потребоваться несколько мультиплексированных датчиков Холла, чтобы магнит перемещался из одного положения в другое. Перекрестное управление таким мультиплексированием достаточно сложное, а на результаты измерения может влиять изменение температуры. Индуктивный датчик не имеет таких недостатков и измеряет линейные перемещения в соответствии с требованиями приложений.
Индуктивные датчики положения измеряют только линейные перемещения.
Датчики этого типа могут измерять не только линейные, но и вращательные и дуговые перемещения с не меньшей точностью при более высокой помехоустойчивости. Индуктивная технология применяется для измерения положения автомобильных педалей, воздушных и водяных клапанов, а также роторов. Например, 360-градусный датчик положения ротора устроен как изогнутый линейный датчик с соединенными концами. Индуктивные датчики для измерения круговых перемещений – самые точные приборы благодаря тому, что генерируемое магнитное поле является очень однородным вдоль всех радиусов. Таким образом, эта технология обеспечивает измерение линейных, круговых и дуговых перемещений.
Таким образом, эта технология обеспечивает измерение линейных, круговых и дуговых перемещений.
Измеряемые объекты должны быть изготовлены из магнитного материала.
Датчики рассматриваемого типа определяют изменения магнитного поля под влиянием перемещающегося металлического объекта, но в использовании магнитного материала нет необходимости. Все проводящие ток объекты вызывают появление вихревых токов, возмущающих магнитное поле (см. рис. 5).
Рис. 5. Вихревые токи, наведенные в металлической структуре
Чтобы увеличить расстояние, на котором определяется положение металлического объекта, а также уменьшить потребляемый ток, в качестве металлов с наилучшими проводящими свойствами применяется медь, алюминий или сталь.
Индуктивные датчики положения программируются внешними устройствами.
В автомобилях часто применяются датчиковые модули, которые подключаются к блокам управления двигателем с помощью проводов. Как правило, к датчику подключаются провода питания и заземления, а также выходного контакта. Калибровка модуля с помощью силового вывода исключает необходимость в дополнительных подключениях к печатной плате с датчиком, что позволяет сэкономить расходы и проблемы сборки. Однако в некоторых встраиваемых приложениях датчик может программироваться с помощью внешнего микроконтроллера, например LX3302A от компании Microchip с помощью выводов GPIO.
Калибровка модуля с помощью силового вывода исключает необходимость в дополнительных подключениях к печатной плате с датчиком, что позволяет сэкономить расходы и проблемы сборки. Однако в некоторых встраиваемых приложениях датчик может программироваться с помощью внешнего микроконтроллера, например LX3302A от компании Microchip с помощью выводов GPIO.
Разработчики не получают помощи от производителей компонентов.
Не так давно для получения хороших результатов требовалось обладать хорошим опытом проектирования приложений с магнитными датчиками, доступом к самым современным средствам моделирования методом конечных элементов или большим терпением для реализации проекта методом проб и ошибок. В настоящее время производители ИС предоставляют клиентам демонстрационные платы и наборы, которые позволяют не только начать с разработки модели, но и выполнить полноценные симуляции проводников печатной платы. Некоторые вендоры даже предоставляют результаты симуляций с анализом погрешности датчика до этапа испытаний печатной платы.
Шифр статьи: МСА816
Размещение статей, рекламы, новостей и подписка: [email protected]
11 мифов об индуктивных датчиках положения
Загрузите эту статью в формате PDF.
Мы давно этого ждали и теперь это широко внедряется, а именно искусственный интеллект (ИИ). От автоматических заводов, беспилотных автомобилей и грузовиков до роботов-шоферов — теперь мы видим, как ИИ сделает автоматические машины более эффективными, прибыльными и улучшит нашу жизнь. И в основе этих автоматических машин и автомобилей лежит их способность точно измерять положение и движение.
Существует множество способов измерения положения, но одной из быстро развивающихся технологий является индуктивный датчик положения. Точность, помехоустойчивость и экономичность – вот некоторые из преимуществ этой технологии. Ниже развеиваются некоторые неверные представления об индуктивных датчиках положения, а также проводится сравнение с другими сенсорными технологиями, такими как датчики на эффекте Холла и магниторезистивные датчики.
1. Индуктивные датчики используют индуктивность для измерения положения.
Этикетка может сбивать с толку, но на самом деле 9Индуктивные датчики 0003 не измеряют индуктивность. Вместо этого они используют электромагнитную индукцию магнитного поля в металлической мишени вместе с хорошо известными свойствами трансформатора с воздушным сердечником и законом Фарадея, чтобы точно определить местонахождение возмущения этого магнитного поля мишенью. Это может показаться сложным для многих из нас, кто забыл все, что мы узнали о теории электромагнитного поля из школы. Проще говоря, индуктивные датчики измеряют возмущение магнитного поля проводящей мишенью.
Кроме того, это магнитное поле не создается постоянным магнитом, который необходим для датчиков Холла и магниторезистивных датчиков. Вместо этого он генерируется первичной обмоткой трансформатора (рис. 1) .
1. Индуктивный датчик положения создает магнитное поле с помощью обмоток трансформатора.
Две вторичные катушки используются для обнаружения этого магнитного поля, и, как и в случае с трансформатором, мы используем закон Фарадея, чтобы преобразовать это поле в напряжение. Металлическая мишень, помещенная в это магнитное поле, будет индуцировать вихревые токи, которые противодействуют магнитному полю и снижают напряженность поля до нуля на мишени. Две приемные катушки, размещенные в разных физических местах, будут обнаруживать разное напряжение. Положение цели можно рассчитать, просто рассчитав отношение этих двух напряжений приемной катушки.
2. Индуктивные датчики положения не точны.
Этот миф легко развеять, потому что индуктивные датчики положения очень точны , превосходно работающие при более высоких температурах, где другие системы на основе магнитов испытывают проблемы. Основная причина точности индуктивных датчиков положения заключается в том, что они не зависят от нелинейной природы постоянного магнита. Вместо этого они просто ищут возмущение самогенерируемого магнитного поля.
Таким образом, погрешность менее ±0,1 % во всем диапазоне измерений может быть достигнута при комнатной температуре. Погрешности ниже ±0,3 % достижимы при изменении температуры и изменении воздушного зазора между целью и датчиком. Кроме того, полный алгоритм предназначен либо для устранения колебаний температуры, либо для сведения к минимуму их влияния.
Например, индуктивный датчик положения будет возбуждать магнитное поле с частотой от 1 до 6 МГц, но в нем используется LC-генератор. Хотя обе эти величины могут меняться в зависимости от температуры, это не влияет на положение.
Причина в том, что вторичные приемные каналы используют синхронную демодуляцию (рис. 2) , которая является функцией первичного генератора. Этот дрейф никак не повлияет на амплитуду принимаемых сигналов. Помимо температуры, на магнитное поле могут влиять металлические предметы рядом с датчиком.
2. Синхронный демодулятор может использоваться для устранения различий, вызванных колебаниями температуры.
В результате требуется определенный уровень калибровки, но калибровка не меняется в зависимости от температуры. Например, LX3302A компании Microchip Technology использует восемь калибровочных сегментов. Кроме того, 13-разрядные аналого-цифровые преобразователи (АЦП) и 32-разрядные процессоры помогают устранить любые ошибки вычислений и квантования, которые могут возникнуть, обеспечивая 12-разрядное выходное разрешение во всем диапазоне измерений.
3. Индуктивные датчики положения дороги.
Нечасто удается получить лучшее из обоих миров — высокая производительность по разумной цене, — но индуктивные датчики и здесь эффективны. В то время как датчики на эффекте Холла и магниторезистивные датчики требуют, чтобы постоянный магнит был изготовлен с надлежащими допусками и силой, чтобы получить приличную точность, индуктивным датчикам нужен только кусок металла в качестве цели, что экономит пользователю цену магнита.
Хотя печатная плата должна быть больше, чтобы проложить дорожки датчика, это обычно стоит значительно меньше, чем стоимость магнита. И если у вас есть дополнительное место на печатной плате, эта часть может быть свободной. Таким образом, индуктивный датчик положения является более экономичным решением по сравнению с решениями на основе эффекта Холла и магниторезистивными решениями, поскольку он обеспечивает измерение магнитного поля без магнита.
И если у вас есть дополнительное место на печатной плате, эта часть может быть свободной. Таким образом, индуктивный датчик положения является более экономичным решением по сравнению с решениями на основе эффекта Холла и магниторезистивными решениями, поскольку он обеспечивает измерение магнитного поля без магнита.
4. Индуктивные датчики положения чувствительны к внешнему магнитному полю.
Современные автоматические машины создают больше паразитных магнитных полей, чем когда-либо прежде, вызывая проблемы с датчиками Холла и магниторецепторами. Индуктивные датчики положения используют активную демодуляцию для подавления этих полей рассеяния (рис. 3) .
3. Двигатель и большой ток могут генерировать сильные магнитные поля рассеяния.
Электромобили следующего поколения могут иметь ток в несколько сотен ампер от аккумуляторов до тягового двигателя. Кроме того, большинство автомобилей имеют более трех бесколлекторных двигателей постоянного тока (BLDC) для движения автомобиля, электронный усилитель руля и вспомогательный двигатель торможения. Все эти системы генерируют магнитные поля рассеяния.
Все эти системы генерируют магнитные поля рассеяния.
Из-за быстрого роста этих паразитных магнитных полей новые спецификации требуют дополнительных испытаний на устойчивость к более сильным магнитным полям. В автомобильной промышленности автомобильная электроника теперь подвергается воздействию поля постоянного тока силой 4 мТл (миллитесла) во время квалификации электромагнитной совместимости (ЭМС) и ложным показаниям любого из критически важных для безопасности датчиков — усилителя руля, педали акселератора, положения тягового ротора. — не может произойти.
Преимущество индуктивного определения положения в том, что оно невосприимчиво к этим шумам, поскольку активно фильтрует только ту частоту, которая требуется для определения. Поскольку в индуктивных датчиках положения не используется магнитный материал, они не улавливают постоянное магнитное поле. Другими словами, закон Фарадея равен нулю для постоянного магнитного поля.
Кроме того, описанный выше синхронный демодулятор будет отфильтровывать другие частоты выше и ниже основной частоты возбуждения, почти так же, как вы можете выбрать одну АМ-радиостанцию, когда антенна улавливает весь АМ-диапазон. Такой же тип отклонения невозможен с датчиками на эффекте Холла и магниторезистивными датчиками.
Такой же тип отклонения невозможен с датчиками на эффекте Холла и магниторезистивными датчиками.
5. Индуктивное определение положения – это новая технология.
Индуктивные датчики положения используют печатную плату в качестве датчика и кусок металла в качестве цели. Хотя это может быть новый способ реализации датчиков, технология хорошо зарекомендовала себя. Линейный дифференциальный трансформатор напряжения (LVDT) очень близок к индуктивному датчику положения. LVDT будет использовать первичную катушку и две вторичные катушки для определения положения металлического вала в роботизированных приложениях (рис. 4) .
4. Линейный дифференциальный трансформатор напряжения (LVDT) очень близок к индуктивному датчику положения. Он может использовать обмотки двигателя для обнаружения изменений. Мишень ротора может использоваться вместе с датчиком на основе печатной платы.
Индуктивные датчики положения во многом используют те же методы, чтобы уменьшить обмотки до простой печатной платы. Магнитные резольверы, вращающаяся версия LVDT, также используют аналогичные методы. Опять же, вместо металлической конструкции, похожей на трансформатор, индуктивные датчики положения выполняют ту же функцию, которую можно выполнить, используя дорожки на печатной плате. Для определения положения LVDT, резольвер и индуктивные датчики принимают отношение двух напряжений, вызванных возмущением магнитного поля проводящим элементом.
Магнитные резольверы, вращающаяся версия LVDT, также используют аналогичные методы. Опять же, вместо металлической конструкции, похожей на трансформатор, индуктивные датчики положения выполняют ту же функцию, которую можно выполнить, используя дорожки на печатной плате. Для определения положения LVDT, резольвер и индуктивные датчики принимают отношение двух напряжений, вызванных возмущением магнитного поля проводящим элементом.
6. Резервные индуктивные датчики требуют вдвое больше места.
Критически важные автомобильные и промышленные приложения часто нуждаются в резервировании для обеспечения высочайшего уровня безопасности. Благодаря оптимизации слоев печатной платы и некоторым интеллектуальным методам первичной обмотки двойной датчик не требует удвоения места на печатной плате. Вместо этого оба датчика могут находиться в одном пространстве (рис. 5) печатной платы. В этом случае они имеют одно и то же магнитное поле, слабо связаны магнитным полем и при этом обеспечивают гальваническую развязку. Вторичные могут перейти к двум ИС, которые затем будут выводить независимое и резервное положение, повышая безопасность приложения.
Вторичные могут перейти к двум ИС, которые затем будут выводить независимое и резервное положение, повышая безопасность приложения.
5. Резервные датчики могут совместно использовать целевое сенсорное устройство, тем самым уменьшая общий размер резервированной системы.
7. Индуктивные датчики положения могут обрабатывать только небольшие линейные измерения.
Индуктивные датчики положения могут измерять линейные положения на различных длинах. Наилучшая точность достигается, когда длина датчика близка к приблизительному желаемому диапазону измерения, так что выходное разрешение можно масштабировать по кратчайшему расстоянию. Длина датчика может варьироваться от 5 мм до 600 мм и более для практических применений. Любые ограничения по длине связаны со способностью генератора генерировать правильный LC-резонансный сигнал. Во всех случаях принцип работы одинаков: создается магнитное поле и регистрируется возмущение. Линейные измерения являются несомненным преимуществом этой технологии, а чувствительность может быть достигнута за счет единого принципа измерения во многих практических диапазонах измерений.
В качестве альтернативы датчику Холла может потребоваться мультиплексирование нескольких датчиков Холла при перемещении магнита из одного места в другое. Обработка кроссовера этого мультиплексирования сложна и может зависеть от температуры. Индуктивный датчик не страдает от этой проблемы, и его можно заставить выводить линейные измерения, соответствующие требованиям приложения.
8. Индуктивные датчики положения могут измерять только линейные измерения.
Несмотря на то, что линейное измерение является несомненным преимуществом этого метода, индуктивные датчики положения могут также измерять траектории поворотных и дуговых датчиков с такими же преимуществами, как более высокая точность и лучшая помехоустойчивость. Автомобильные педали, воздушные клапаны, водяные клапаны и положение ротора — все это примеры датчиков, в которых можно использовать технологию индуктивных датчиков.
Думайте о поворотном датчике на 360 градусов как о простом линейном датчике, концы которого загнуты для соединения с другим датчиком. Оказывается, вращающиеся индуктивные датчики положения являются наиболее точными датчиками, потому что генерируемое магнитное поле может быть очень однородным на каждом радиусе. С помощью этой технологии возможны линейные, дуговые и вращательные измерения.
Оказывается, вращающиеся индуктивные датчики положения являются наиболее точными датчиками, потому что генерируемое магнитное поле может быть очень однородным на каждом радиусе. С помощью этой технологии возможны линейные, дуговые и вращательные измерения.
9. Материал мишени должен быть магнитным.
Индуктивный датчик положения обнаруживает изменение магнитного поля, и это магнитное поле возмущается металлической мишенью, но магнитный материал не требуется. Все, что проводит ток, позволяя течь наведенному вихревому току, вызовет это возмущение (рис. 6) . Магнитные материалы, такие как железо, являются проводящими, поэтому их также можно использовать. Однако целевой металл будет иметь лучшее расстояние обнаружения и меньший ток питания, если он сделан из хорошего проводника, такого как медь, алюминий или сталь.
6. В металлической конструкции могут возникать вихревые токи.
10. Индуктивные датчики положения необходимо программировать по входной мощности.
В автомобиле многие датчики используются в модулях, которые подключаются к блокам управления двигателем с помощью набора проводов. Для датчика это обычно состоит из линии питания, линии заземления и выходного контакта. Возможность калибровки модуля через штырь питания гарантирует, что дополнительные подключения к печатной плате датчика не требуются, что снижает затраты и проблемы со сборкой.
Однако для некоторых приложений требуется микроконтроллер. Именно здесь встроенные приложения хотели бы запрограммировать датчик с помощью другого микроконтроллера, а не специальной тестовой системы. LX3302A от Microchip имеет эту функцию и возможность, что позволяет программировать его через контакты GPIO.
11. Вы сами по себе с дизайном .
Не так давно для получения хороших результатов требовалось глубокое знание магнитных полей и доступ к высокотехнологичному набору для моделирования методом конечных элементов или множество проб и ошибок. Сегодня поставщики интегральных схем предоставляют эту услугу своим клиентам с помощью оценочных плат и комплектов, которые помогут вам перейти от концепции к реальному моделированию трассировки печатной платы. Некоторые поставщики даже предоставляют результаты моделирования, оценивая ошибку, которая будет у вас с датчиком, до того, как печатная плата будет протестирована. Microchip предлагает эту помощь для помощи в проектировании ваших печатных плат.
Сегодня поставщики интегральных схем предоставляют эту услугу своим клиентам с помощью оценочных плат и комплектов, которые помогут вам перейти от концепции к реальному моделированию трассировки печатной платы. Некоторые поставщики даже предоставляют результаты моделирования, оценивая ошибку, которая будет у вас с датчиком, до того, как печатная плата будет протестирована. Microchip предлагает эту помощь для помощи в проектировании ваших печатных плат.
Эти 11 мифов показывают, как индуктивные датчики положения сравниваются с датчиками Холла и магниторезистивными датчиками, демонстрируя точность, устойчивость к паразитным магнитным помехам и экономическую эффективность. Готовы ли вы попробовать эту технологию со своим следующим продуктом для определения положения с помощью ИИ?
Марк Смит, доктор философии, менеджер по маркетингу линейки продуктов, подразделение смешанных сигналов и линейных устройств, в компании Microchip Technology.
Линейные индуктивные датчики положения | Althen Sensors
Линейные индуктивные датчики положения долговечны и обеспечивают высокую точность измерений для требовательных гидравлических или пневматических приложений с обратной связью по положению.