
Электродвигатели постоянного тока серии П-11, П-12
Купить Электродвигатели постоянного тока серии П-11, П-12
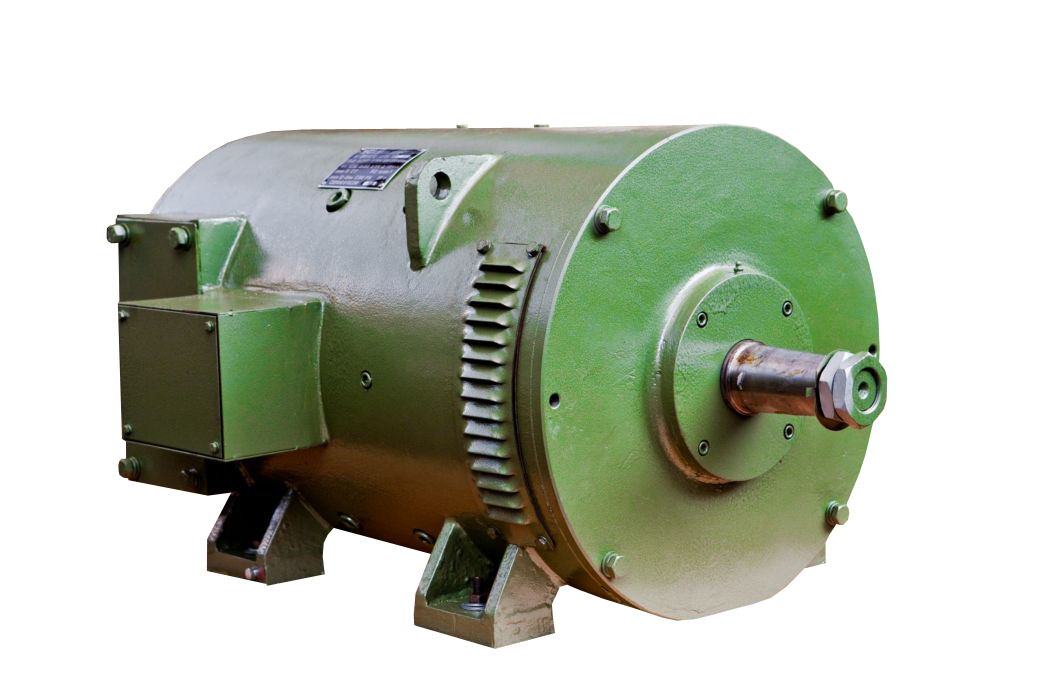
Электродвигатели постоянного тока серии П 1 предназначены для длительного режима работы в электроприводах постоянного тока в условиях умеренного, морского и тропического климата. Электрические машины изготавливаются с самовозбуждением.
Электрические машины П11М, П12М, имеют исполнение оболочки по степени защищенности IP23; машины ПБ11М, ПБ12М – IP54
Электродвигатель постоянного тока П1: условия эксплуатации Электродвигатели постоянного тока П1 рассчитаны для работы при температуре окружающего воздуха от минус 40ºC до плюс 40ºC. Относительная влажность окружающего воздуха 95±3% при температуре 20º±5ºC. Вибрация, ударные сотрясения, длительные наклоныоси машины от 45º в любую сторону и при качке до 45º с периодом качки 7-9 с.Возбуждение электродвигателей постоянного тока П1 независимое, смешанное, параллельное, последовательное. Изоляция электродвигателей постоянного тока П1
Изоляция электродвигателей постоянного тока П1
- 2 Iн в течении 1 мин. – стабильное напряжение;
- 1,5 Iн в течение 2 мин. – меняющееся напряжение;
- 4 Iн в течение 20 с.
Номинальный режим работы электродвигателей постоянного тока — продолжительный (SI по ГОСТ 183-74).Электродвигатели постоянного тока П1 допускают работу в режимах:
- кратковременном – S2
- повторно-кратковременном – S3
Основные параметры электродвигателей постоянного тока серии П1
| Тип дви- гателя | U=50 B | U=75 B | U=110 B | U=220 B | ||||||||
| N, кВт | I, A | n, об/мин | N, кВт | I, А | об/мин | N, кВт | I, А | n, об/мин | N, кВт | I, А | n, об/мин | |
| П11М | 0,50 0,25 | 14,50 6,85 | 2800 1500 | 0,20 0,50 0,20 | 4,20 9,90 4,20 | 1740 2800 | 0,14 0,29 0,66 | 2,04 4,05 8,20 | 1000 1500 3000 | 0,14 0,29 0,66 | 1,10 2,04 4,11 | 1000 1500 3000 |
| ПБ11M | 0,15 0,33 | 2,00 3,80 | 1500 3000 | 0,15 | 1,00 1,90 | 1500 3000 | ||||||
Габаритные и установочно-присоединительные размеры электродвигателей постоянного тока серии П1
| Тип машины | Размеры в мм | Масса в кг | |||||||||||||||||||||||
| L1 | L2 | L10 | L11 | L30 | L33 | h | h3 | h5 | h6 | h20 | h40 | h41 | b1 | b2 | b10 | b11 | d1 | d2 | d10 | d20 | d22 | d30 | |||
| П11М | 40 | — | 155 | 372 | — | 112 | 6 | 4 | 20,5 | 13,5 | 11 | 210 | — | 6 | 4 | 145 | 180 | 18 | 9 | 130 | М10 | 196 | 18,5 | ||
| ПБ11М | 30 | — | 399 | ||||||||||||||||||||||
| ПБ11М | — | — | — | 372 | — | 204 | 17 | ||||||||||||||||||
| П12М | — | 180 | 397 | — | 210 | 23,5 | |||||||||||||||||||
| ПБ12М | 30 | — | 424 | ||||||||||||||||||||||
| ПБ12М | — | — | — | 397 | — | 204 | 21,8 | ||||||||||||||||||
| П11М | 223 | 17 | |||||||||||||||||||||||
| П12М | 397 | 21,8 | |||||||||||||||||||||||
Информация относится к следующим наименованиям каталога
| Наименование | Ед. изм. изм. | Цена с НДС, р. | |
| Электродвигатель 0,2 кВт 1740 об П11М 75 V IM1001 возбуждение параллельное | шт | 18 600,00 | |
| Электродвигатель 0,2 кВт 1740 об П11М 75 В IM2101 возбуждение параллельное | шт | 20 100,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 110 В IM1001 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 110 В IM2101 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM1001 возбуждение смешанное | шт | ||
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM1002 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM2101 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,29 кВт 1500 об П11М 220 В IM2102 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,3 кВт 1500 об П11 У2 220 В IM2101 | шт | ||
| Электродвигатель 0,44 кВт 1500 об П12М 110 В IM1001 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,44 кВт 1500 об П12М 110 В IM2101 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,44 кВт 1500 об П12М 220 В IM1001 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,44 кВт 1500 об П12М 220 В IM2101 возбуждение смешанное | шт | 48 000,00 | |
| Электродвигатель 0,45 кВт 1500 об П12 220 В IM2101 возбуждение смешанное | шт | 21 200,00 | |
| Электродвигатель 0,45 кВт 1500 об П12 220/220 В IM2101 возбуждение независимое | шт | 21 200,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 50 В IM1001 возбуждение смешанное | шт | 40 000,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 50 В IM2101 возбуждение смешанное | шт | 40 000,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 75 В IM1001 | шт | 27 640,00 | |
| Электродвигатель 0,5 кВт 2800 об П11М 75 В IM2101 | шт | 27 640,00 | |
| Электродвигатель 0,56 кВт 2800 об П11М 220 В IM2101 возбуждение смешанное | шт | 36 000,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 110 В IM1001 возбуждение смешанное | шт | 21 200,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 110 В IM2101 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 220 В IM1001 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,66 кВт 3000 об П11М 220 В IM2101 возбуждение смешанное | шт | 42 000,00 | |
| Электродвигатель 0,7 кВт 3000 об П11 220 В IM1001 возбуждение смешанное | шт | 38 400,00 | |
| Электродвигатель 0,7 кВт 3000 об П11 220 В IM2101 возбуждение смешанное | шт | 38 400,00 | |
| Электродвигатель 0,7 кВт 3000/3450 об П11 220/110 В IM2101 | шт | 19 600,00 | |
| Электродвигатель 0,95 кВт 2800 об П12М 220 В IM2101 возбуждение смешанное | шт | 31 200,00 | |
| Электродвигатель 0,95 кВт 2800 об П12М 220/220 В IM1001(присоединительные размеры МИ-32) | шт | 61 440,00 | |
| Электродвигатель 0,95 кВт 3000 об П12М 110 В IM1001 возбуждение смешанное | шт | 19 600,00 | |
| Электродвигатель 0,95 кВт 3000 об П12М 220 В IM1001 возбуждение смешанное | шт | 19 600,00 | |
| Электродвигатель 0,95 кВт 3000 об П12М 220 В IM2101 возбуждение смешанное | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 220 В IM1001 | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 220 В IM2101 | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 220 В IM3601 | шт | 19 600,00 | |
| Электродвигатель 1,0 кВт 3000 об П12 УХЛ4 220/220 В IM3601 | шт | 19 600,00 | |
Электродвигатель 1,0 кВт/0,6 кВт/0,55 кВт П11М72 ОМ5 с приемкой ОТК без магн.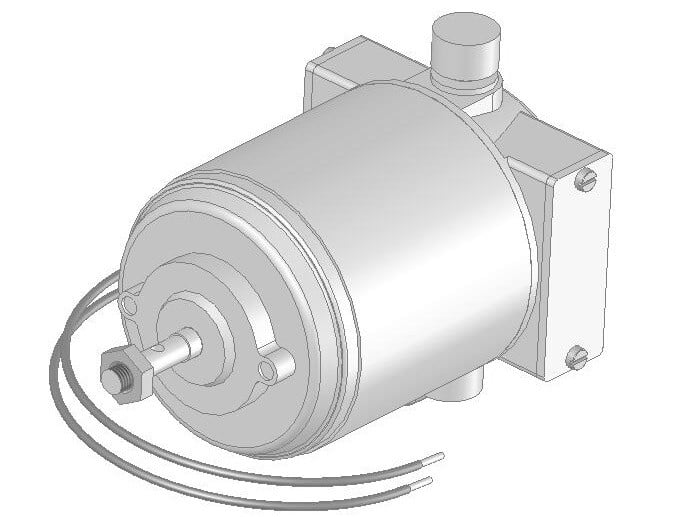 пускателя пускателя | шт | 230 000,00 | |
| Наименование | Ед. изм. | Цена с НДС, р. |
Электродвигатели постоянного тока главного движения МР
- Главная
- Каталог
- Комплектующие для станков
- Электродвигатели
- Серводвигатели и двигатели главного движения
Под заказ
Электродвигатели постоянного тока главного движения МР
Электродвигатели серии МР предназначены для главных приводов металлообрабатывающих станков и сконструированы в соответствии с новейшими тенденциями в области.
В серию МР входят электродвигатели с высотой оси вала 112, 132, 160 и 225мм. Электродвигатели производятся в различных модификациях по заказу клиента: в зависимости от монтажа — вертикальное или горизонтальное исполнение; в зависимости от скорости вращения; в зависимости от уровня шума и вибраций.
Модели электродвигателей
|
Тип электро-двигателя |
Ном. мощ-ность |
Ном. скорость |
Maкс. скорость |
Напря-жение якоря |
Ток якоря |
Напря-жение возбужд. |
Ток возбужд. |
Момент инерции |
Масса |
|
kW |
min-1 |
min-1 |
V |
А |
V |
А |
kg. |
kg |
|
|
MP112S |
3.7 |
1000 |
5500 |
400 |
12.5 |
180 |
2.5 |
0.050 |
86 |
|
MP112SМ |
5.5 |
3000 |
3000 |
400 |
17.5 |
180 |
0.66 |
0.050 |
86 |
|
MP112SL |
7. |
2200 |
3000 |
400 |
22 |
180 |
1.5 |
0.050 |
86 |
|
MP112M |
5.5 |
1000 |
5500 |
400 |
17 |
180 |
3 |
0.066 |
98 |
|
MP112MА |
13 |
2280 |
6000 |
400 |
38 |
180 |
2. |
0.066 |
98 |
|
MP112L |
7.5 |
1000 |
5500 |
400 |
25 |
180 |
4.5 |
0.090 |
119 |
|
MP112LА |
10 |
1500 |
5500 |
400 |
29 |
180 |
5 |
0.90 |
119 |
|
MP132S |
5. |
1000 |
35020 |
400 |
18.5 |
180 |
2.5 |
0.90 |
135 |
|
MP132SA |
5.5 |
1000 |
4500 |
400 |
19 |
180 |
2.48 |
0.090 |
135 |
|
MP132M |
11 |
1000 |
3500 |
400 |
34 |
110 |
5. |
0.157 |
168 |
|
MP132MA |
11 |
1000 |
4500 |
400 |
34 |
180 |
3.5 |
0.141 |
167 |
|
MP132MAХ |
11 |
1000 |
4500 |
400 |
34 |
180 |
3.65 |
0.141 |
167 |
|
MP132MDA |
12 |
1500 |
4500 |
400 |
39 |
240 |
1. |
0.157 |
168 |
|
MP132MB |
18.5 |
1500 |
4500 |
400 |
54 |
180 |
3.8 |
0.141 |
167 |
|
MP132MG1 |
18.5 |
1700 |
1700 |
400 |
55.7 |
180 |
2.9 |
0. |
167 |
|
MP132L |
15 |
1000 |
3500 |
400 |
46 |
180 |
5 |
0.163 |
185 |
|
MP132LA |
15 |
1000 |
4500 |
400 |
46 |
180 |
4.75 |
0.163 |
185 |
|
MP132LAX |
15 |
1000 |
4500 |
400 |
46 |
180 |
4. |
0.163 |
185 |
|
MP132LCA |
18 |
1500 |
2000 |
400 |
54 |
240 |
2.3 |
0.163 |
185 |
|
MP132LC |
23 |
1750 |
4500 |
440 |
60 |
220 |
2.88 |
0.163 |
185 |
|
MP132MC |
22 |
2800 |
2800 |
440 |
55. |
190 |
2.2 |
0.157 |
168 |
|
MP160M |
22 |
1000 |
4500 |
400 |
64 |
180 |
6.5 |
0.410 |
268 |
|
MP160MGL |
37 |
1700 |
1700 |
400 |
105 |
180 |
4. |
0.410 |
268 |
|
MP160L |
30 |
1000 |
4000 |
400 |
89 |
180 |
6.8 |
0.456 |
298 |
|
MP160LX |
30 |
1000 |
4000 |
400 |
89 |
180 |
6.8 |
0.456 |
298 |
|
MP160LM |
45 |
2000 |
4000 |
400 |
125 |
180 |
4. |
0.456 |
298 |
|
MP160LC |
45 |
2000 |
4500 |
400 |
125 |
180 |
3.6 |
0.456 |
298 |
|
MP225M |
55 |
600 |
2500 |
400 |
165 |
180 |
8.5 |
1.840 |
735 |
|
MP225L |
70 |
800 |
3000 |
400 |
200 |
180 |
9. |
2.100 |
764 |
 m2
m2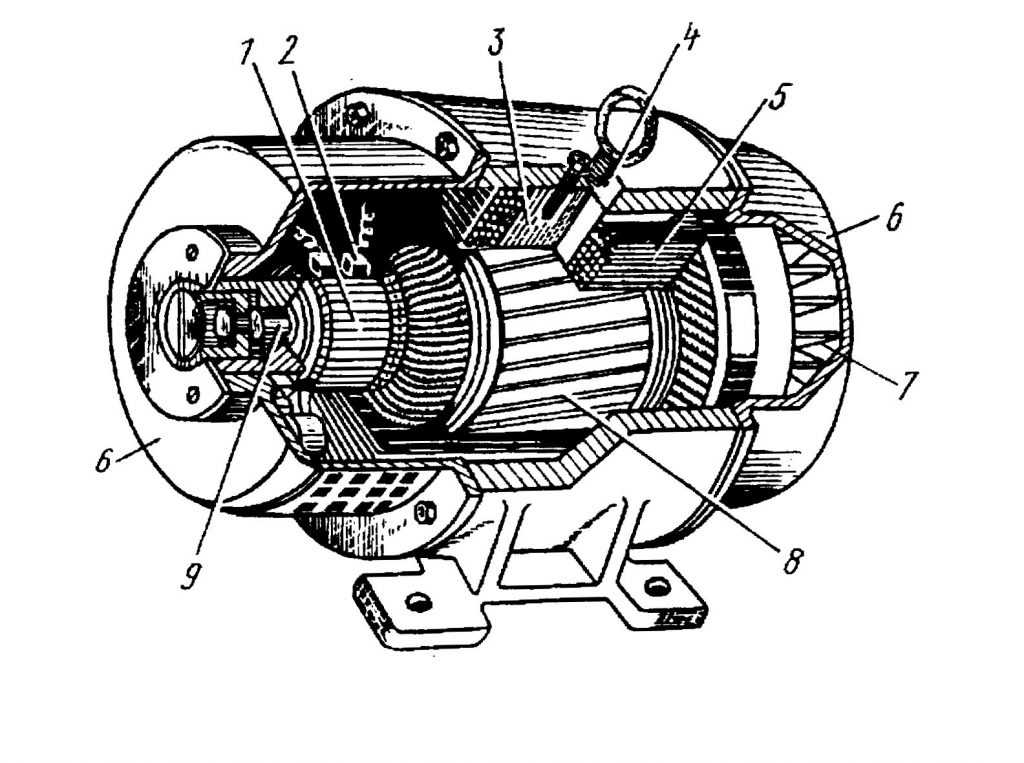 5
5 5
5 5
5 8
8 5
5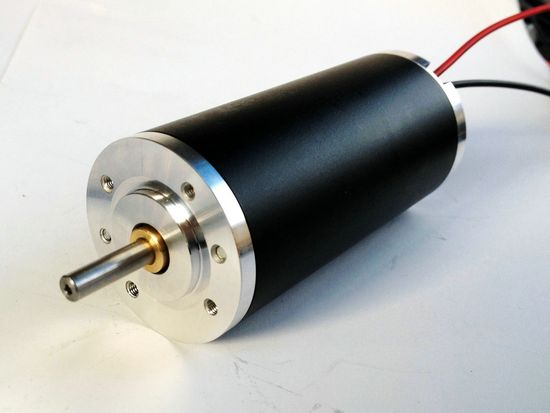 141
141 75
75 5
5 2
2 0
0 65
65Характеристики
- Страна происхождения
- Болгария
- Тип электродвигателя
- Главного движения
- Ток
- Постоянный
Электродвигатели MP
595.
 37 KB
37 KB
 37 KB
37 KB|
Тип двигателя |
Габаритные размеры |
|||||||||||||||||||
|
h |
h5 |
h10 |
h3 |
h33 |
l1 |
l10 |
l20 |
l30 |
l31 |
l45 |
d1 |
d10 |
d20 |
d22 |
d24 |
d25 |
b1 |
b10 |
b11 |
|
|
МР 112S |
112 |
35 |
11 |
227 |
472 |
80 |
250 |
4 |
545 |
70 |
103 |
32 |
12 |
215 |
15 |
250 |
180 |
10 |
190 |
234 |
|
МР 112M |
112 |
35 |
11 |
227 |
472 |
80 |
250 |
4 |
585 |
70 |
143 |
32 |
12 |
215 |
15 |
250 |
180 |
10 |
190 |
234 |
|
МР 112L |
112 |
35 |
11 |
227 |
472 |
80 |
250 |
4 |
650 |
70 |
208 |
32 |
12 |
215 |
15 |
250 |
180 |
10 |
190 |
234 |
|
MP 132S |
132 |
41 |
15 |
262 |
500 |
80 |
315 |
5 |
580 |
90 |
125 |
38 |
14 |
265 |
15 |
300 |
230 |
10 |
216 |
264 |
|
MP 132M |
132 |
41 |
15 |
262 |
500 |
80 |
435 |
5 |
700 |
90 |
245 |
38 |
14 |
265 |
15 |
300 |
230 |
10 |
216 |
264 |
|
MP 132L |
132 |
41 |
15 |
262 |
500 |
80 |
470 |
5 |
735 |
90 |
280 |
38 |
14 |
265 |
15 |
300 |
230 |
10 |
216 |
264 |
|
MP 160M |
160 |
51 |
14 |
317 |
655 |
80 |
400 |
5 |
815 |
108 |
268 |
48 |
15 |
350 |
19 |
400 |
300 |
14 |
254 |
332 |
|
MP 160L |
160 |
51 |
14 |
317 |
655 |
110 |
450 |
5 |
865 |
108 |
318 |
48 |
15 |
350 |
19 |
400 |
300 |
14 |
254 |
332 |
|
MP 225M |
225 |
74 |
20 |
445 |
760 |
140 |
670 |
5 |
1165 |
149 |
510 |
70 |
19 |
400 |
19 |
450 |
350 |
20 |
356 |
460 |
|
MP 225L |
225 |
74 |
20 |
445 |
760 |
140 |
670 |
5 |
1165 |
149 |
510 |
70 |
19 |
400 |
19 |
450 |
350 |
20 |
356 |
460 |
Особенности электродвигателя MP
- Шихтовый магнитопровод
- Тепловой класс на изоляции «F» или «H»
- Ввынужденное охлаждение
- Степень защиты IP23
- Возможность аксиального или радиального охлаждения — по выбору клиента
- Монтажные размеры, тип охлаждения, уровень шума и вибрации в соответствуют требованиями IEC
- Встроенный датчик тепловой защиты
- Встроенный тахогенератор с константой 0,02 +/-1% V/мин-1 или 0,004 +/-1% V/мин-1
- Номинальная мощность до максимальной скорости.

Оценка
Отправляю данную форму, даю согласие на обработку персональных данных
Ваше имя
Номер телефона
Бесконтактные электродвигатели постоянного тока
- Подробности
- Категория: Электрические машины
- электродвигатель
- постоянный ток
- контакты и соединения
Для нормальной работы двигателя постоянного тока необходимо изменять направление тока в проводниках якорной обмотки при изменении его положения относительно полюсов магнитного поля статора. Это переключение в обычных двигателях постоянного тока обеспечивается с помощью коллектора, простейшая конструкция которого показана на рис. 2,в. Однако наличие этого устройства, принципиально необходимого для двигателей постоянного тока, вызывает появление у этих двигателей некоторых нежелательных свойств.
В первую очередь к ним относится необходимость постоянного надзора и ухода за коллекторно-щеточным узлом, так как при эксплуатации двигателя щетки истираются, а коллектор загрязняется и обгорает. Кроме того, неизбежное искрение щеточно-коллекторного аппарата создает радиопомехи, затрудняет применение двигателей во взрывоопасных помещениях и средах. Работа коллекторно-щеточного узла создает также дополнительный шум при работе двигателя.
Стремление устранить механический коллекторно-щеточный узел и заменить его каким-либо бесконтактным устройством с теми же функциями привело к появлению так называемых бесконтактных двигателей постоянного тока. Эти двигатели имеют такие же характеристики, как двигатели с обычным коллектором, но обладают более высокой надежностью и простотой в эксплуатации, не создают при своей работе радиопомех и дополнительного шума.
В настоящее время разработано несколько видов таких двигателей, отличающихся друг от друга способом возбуждения, схемами включения обмоток и типами электрических коммутирующих устройств.
Подробное описание всех типов бесконтактных двигателей постоянного тока выполнить очень трудно, поэтому остановимся лишь на пояснении основных принципов их действия, общих для всех двигателей.
Схема рис. 1 иллюстрирует принцип работы так называемого двигателя с вращающимся выпрямителем.
Рис. 1. Принцип работы бесконтактного двигателя постоянного тока с вращающимся выпрямителем.
Обмотка якоря изображена рамкой, состоящей из проводников А и Б, помещенных в поле магнита N—S.
Представим, что на якоре расположено устройство, состоящее из четырех управляемых ключей К1—К4, которые могут замыкаться или размыкаться любым необходимым нам образом. Эти ключи соединены в так называемую мостовую схему, к одной из диагоналей которой подключены проводники рамки А и Б, а к другой с помощью скользящих контактов СК подводится напряжение от внешнего источника постоянного тока.
Обратимся вначале к схеме на рис. 1,а. Пусть в указанном на этой схеме положении рамки будут замкнуты ключи К1 и КЗ и разомкнуты ключи К2 и К4. Тогда ток в проводниках А и Б будет иметь указанное на рисунке направление и рамка под действием сил F будет поворачиваться против часовой стрелки.
Тогда ток в проводниках А и Б будет иметь указанное на рисунке направление и рамка под действием сил F будет поворачиваться против часовой стрелки.
Рассмотрим теперь положение рамки после ее поворота на 180°, показанное на рис. 1,6. Допустим при этом, что ключи К1 и КЗ разомкнулись, а ключи К2 и К4 замкнулись. Тогда, как нетрудно заметить из рис. 1,6, ток в проводниках А к Б изменит свое направление на противоположное. Вследствие этого сохранится взаимное расположение полюсов магнитного поля и проводников с током, соответствующее показанному на рис. 1,а, а тем самым и направление момента и частоты вращения якоря двигателя. При повороте рамки еще на 180° (рис. 1,а) вновь должны замкнуться ключи К1 и КЗ и разомкнуться ключи К2 и К4 и так далее.
Таким образом, имея рассмотренную ключевую схему, в которой ключи управляются в зависимости от положения рамки (якоря) двигателя указанным способом, можно обеспечить обычную работу двигателя постоянного тока.
Однако преимущества рассмотренной схемы коммутации по сравнению с обычным коллектором (механическим коммутатором) проявятся, очевидно, лишь в том случае, если ключи К1—К4 будут бесконтактными элементами, например полупроводниковыми приборами. Поэтому в реальных бесконтактных двигателях постоянного тока в качестве ключей К1—К4 мостовой схемы, приведенной на рис. 15, используются транзисторы (для двигателей небольших мощностей) или управляемые полупроводниковые диоды-тиристоры (для двигателей средних и больших мощностей.). Открытие и закрытие транзисторов или тиристоров происходят по сигналам специального датчика положения, который укреплен на роторе и выдает управляющие импульсы на соответствующие бесконтактные ключи в зависимости от положения проводников обмотки.
Поэтому в реальных бесконтактных двигателях постоянного тока в качестве ключей К1—К4 мостовой схемы, приведенной на рис. 15, используются транзисторы (для двигателей небольших мощностей) или управляемые полупроводниковые диоды-тиристоры (для двигателей средних и больших мощностей.). Открытие и закрытие транзисторов или тиристоров происходят по сигналам специального датчика положения, который укреплен на роторе и выдает управляющие импульсы на соответствующие бесконтактные ключи в зависимости от положения проводников обмотки.
Таким образом, необходимыми элементами бесконтактного двигателя являются мостовая переключающая схема с бесконтактными полупроводниковыми ключами и датчик положения, управляющий этими ключами.
Следует отметить, что в некоторых конструкциях двигателей в качестве ключей используются герметичные контакты (герконы).
Однако у такого двигателя имеется существенный недостаток: токоподвод к якорю происходит с помощью скользящего щеточного контакта. Хотя такой узел рис. 2. Бесконтактный двигатель постоянного тока с обмоткой переменного тока на статоре (щетка — контактное кольцо) и не создает столько неудобств, сколько щеточно-коллекторное устройство, его наличие все же является нежелательным.
Хотя такой узел рис. 2. Бесконтактный двигатель постоянного тока с обмоткой переменного тока на статоре (щетка — контактное кольцо) и не создает столько неудобств, сколько щеточно-коллекторное устройство, его наличие все же является нежелательным.
Результатом разработок полностью бесконтактного двигателя постоянного тока является конструкция, показанная на рис. 2. Она во многом напоминает устройство синхронного двигателя с возбуждением от постоянных магнитов: ротор двигателя (в такой конструкции двигателя он часто называется индуктором) представляет собой постоянный магнит, а обмотка переменного тока (на рис. 2 показан лишь один ее виток) уложена на неподвижной части двигателя — статоре. В остальном конструкция двигателя соответствует схеме на рис. 1: питание обмотки осуществляется от одной диагонали мостовой схемы, на вторую диагональ которой подается напряжение сети постоянного тока. Ключи К1—К4, образующие мостовую схему, также управляются от датчика положения ДП, установленного на роторе двигателя. В качестве ключей используются, как правило, транзисторы или тиристоры. Датчик положения вырабатывает импульсы для управления ключами таким образом, чтобы обеспечивалось нужное направление тока в проводниках обмотки статора при изменении положения ротора (индуктора).
В качестве ключей используются, как правило, транзисторы или тиристоры. Датчик положения вырабатывает импульсы для управления ключами таким образом, чтобы обеспечивалось нужное направление тока в проводниках обмотки статора при изменении положения ротора (индуктора).
Остановимся теперь несколько подробнее на описании специфичных узлов бесконтактного двигателя постоянного тока: мостовой схемы и датчика положения. Назначением мостовой схемы, как уже отмечалось выше, является изменение направления тока в обмотке якоря при работе двигателя, или, другими словами, преобразование постоянного тока источника питания в переменный ток проводников обмотки якоря.
Такое устройство, преобразующее постоянный ток в переменный, называется инвертором в отличие от выпрямителя, который преобразует переменный ток в постоянный).
Рассмотрим одну из распространенных схем тиристорного инвертора — мостовую двухполупериодную однофазную схему, работа которой по существу и рассматривалась выше на примерах схем рис. 1 и 2.
1 и 2.
Основную часть схемы инвертора (рис. 3,а) образуют четыре тиристора 77—Т4 (аналогия ключей К.1— К4 в схемах на рис. 1 и 2). Тиристоры управляются импульсами напряжения от датчика положения: при подаче импульсов тиристоры начинают пропускать ток — открываются, при снятии импульсов—закрываются (отметим, что при питании тиристоров от сети постоянного тока для их закрытия после снятия управляющего импульса должна использоваться специальная коммутационная схема, которая на рис. 2 не показана.
Рис. 3. Принцип работы инвертора.
а — электрическая схема; б — диаграмма токов в элементах инвертора.
Тиристоры работают попарно и попеременно: в течение половины оборота ротора двигателя включены (пропускают ток) тиристоры 77 и ТЗ, в течение второй половины оборота — тиристоры Т2 и Т4. Как видно из схемы, приведенной на рис. 3,а, при открытии тиристоров 77 и ТЗ ток в обмотке якоря имеет одно направление (сплошные стрелки на рисунке), а при открытии тиристоров Т2 и Т4 и закрытии тиристоров 77 и ТЗ ток изменит свое направление в обмотке якоря на противоположное (пунктирные стрелки).
Токовая диаграмма работы элементов схемы, приведенной на рис. 3,а, в зависимости от угла поворота а ротора двигателя показана на рис. 3,6, где 1Т, Ля — соответственно токи тиристоров и обмотки якоря.
Для бесконтактных двигателей постоянного тока разработано несколько типов датчиков положения ротора, которые при своей работе обычно используют энергию магнитного или электрического поля или лучевую энергию.
К датчикам, использующим энергию магнитного поля, относятся индуктивные датчики, датчики Холла, магниточувствительные сопротивления и магнитодиоды.
Индуктивные датчики в свою очередь подразделяются на датчики электродвижущей силы (ЭДС) вращения, датчики с переменным воздушным зазором и датчики с подмагничиванием. Наибольшее распространение для бесконтактных двигателей нашли дифференциальные трансформаторные датчики с переменным воздушным зазором. Эти датчики отличаются простотой и надежностью конструкции и вырабатывают импульсы для управления полупроводниковыми ключами инвертора с требуемыми параметрами.
Схема датчика положения этого типа показана на рис. 4.
Рис. 4. Схема датчика положения ДП бесконтактного двигателя.
Датчик состоит из Ш-образного сердечника 1 и цилиндрического якоря 2 с вырезом, соединяемого с ротором двигателя. На сердечнике датчика расположены три обмотки. Две из них, называемые обмотками возбуждения, располагаются на крайних стержнях и включаются последовательно-встречно. При таком их включении магнитный поток в среднем стержне всегда равен разности магнитных потоков от каждой обмотки возбуждения. На среднем стержне находится обмотка управления датчика, с которой снимается сигнал Uy для управления инвертором. Обычно обмотки возбуждения питаются от переменного напряжения повышенной частоты (в 10—20 раз превышающей частоту коммутации тока в проводниках обмотки якоря), что позволяет снизить габариты датчика.
Датчик работает следующим образом. Когда якорь датчика перекрывает все три стержня сердечника, магнитные потоки каждой обмотки возбуждения равны, ЭДС в катушке управления не наводится и импульсы управления на инвертор не подаются.
Если же якорь перекрывает средний стержень и один из крайних (что имеет место при показанном на рис. 4 положении ротора), то магнитные потоки обмоток возбуждения становятся различными, появляется магнитный поток в среднем стержне и в обмотке управления наводится ЭДС.
При непрерывном вращении якоря обмотка управления вырабатывает последовательность импульсов, при этом их продолжительность (а точнее, скважность — отношение длительности импульса к периоду повторяемости) определяется конфигурацией якоря. Так, при показанном на рис. 4 вырезе, составляющем половину окружности якоря, длительность импульса составляет половину периода.
Практически схемы таких датчиков положения содержат несколько сердечников, число которых соответствует количеству секций (проводников) обмотки якоря.
Перспективным является также применение датчиков положения, использующих гальваномагнитный эффект Холла. Сущность его заключается в том, что в некоторых полупроводниках при прохождении по их продольной оси электрического тока и воздействии внешнего магнитного поля на электродах поперечной оси возникает разность потенциалов. Таким образом, если датчик Холла поместить на статоре двигателя и подвести к нему ток по продольной оси, то при прохождении полюсов индуктора двигателя (или специального индуктора) вблизи датчика на электродах его поперечной оси появляется разность потенциалов (ЭДС датчика), которая может быть использована для управления инвертором.
Таким образом, если датчик Холла поместить на статоре двигателя и подвести к нему ток по продольной оси, то при прохождении полюсов индуктора двигателя (или специального индуктора) вблизи датчика на электродах его поперечной оси появляется разность потенциалов (ЭДС датчика), которая может быть использована для управления инвертором.
В качестве датчиков положения могут использоваться различные магниточувствительные сопротивления и магнитодиоды, внутреннее сопротивление электрическому току которых зависит от величины внешнего магнитного потока.
Распространение получили также различные датчики, использующие лучевую энергию. Они состоят из источника излучения и приемника. Источниками лучистой энергии могут быть различные радиоактивные элементы, электрические лампы и светодиоды. В качестве приемников для этих датчиков применяются фоторезисторы, фотодиоды и фототриоды. Фототриоды обладают лучшими показателями работы — значительной чувствительностью и выходной мощностью, малой инерционностью, но являются более дорогими приборами.
Меньшее распространение для бесконтактных двигателей постоянного тока получили емкостные датчики — устройства, использующие для своей работы энергию электрического поля. По принципу своего действия они представляют собой конденсаторы, емкость которых зависит от положения индуктора двигателя. Эти датчики маломощны, подвержены влиянию паразитных емкостей, требуют дополнительных согласующих схем для совместной работы с инверторами.
Выше уже отмечалось, что по своему устройству бесконтактный двигатель постоянного тока во многом повторяет синхронный двигатель. Поэтому в принципе любой синхронный двигатель может быть превращен в бесконтактный двигатель постоянного тока, если обмотки статора питать от трехфазного инвертора, который будет управляться сигналами датчика положения, установленного на роторе (индукторе) этого синхронного двигателя. Такая система (синхронный двигатель—инвертор—датчик положения) обладает характеристиками и свойствами двигателя постоянного тока.
Вместе с тем электропромышленность выпускает и специально сконструированные бесконтактные двигатели постоянного тока. В основном это двигатели малой мощности, применяемые в различных устройствах автоматики, звукозаписывающей и звуковоспроизводящей аппаратуре, часовых и лентопротяжных механизмах, измерительной аппаратуре и т. д.
В табл. 1 приведены технические данные бесконтактных двигателей постоянного тока серии МБ.
Таблица 1
Двигатели этой серии имеют возбуждение от постоянных магнитов и снабжаются инвертором на транзисторах, который конструктивно выполнен в виде отдельного блока. Этот блок герметизирован и имеет объем от 400 до 900 см3. Датчик положения двигателей МБ трансформаторного типа встроен в корпус двигателя. Двигатели серии МБ допускают регулирование частоты вращения в широких пределах. Первые четыре двигателя, приведенные в табл. 1, имеют стабилизированную частоту вращения. Контроль частоты вращения осуществляется с помощью встроенного синхронного тахогенератора, имеющего при номинальной частоте вращения напряжение 6 В. Двигатели этой серии имеют нормальное исполнение с креплением двигателя за корпус (буква Н в названии двигателя) и фланцевое исполнение (буква Ф). Внешний диаметр двигателей серии МБ колеблется от 35 до 70 мм, а их длина — от 62 до 106 мм.
Двигатели этой серии имеют нормальное исполнение с креплением двигателя за корпус (буква Н в названии двигателя) и фланцевое исполнение (буква Ф). Внешний диаметр двигателей серии МБ колеблется от 35 до 70 мм, а их длина — от 62 до 106 мм.
- Назад
- Вперёд
- Вы здесь:
- Главная
- Оборудование
- Эл. машины
- Обозначения выводов электрических машин
Еще по теме:
- Дефекты обмоток якоря электрических машин постоянного тока
- Обозначения вывода обмоток электрических машин постоянного тока
- Машины постоянного тока
- Ремонт контактных соединений и выводных устройств
- Каскадные соединения асинхронных двигателей с коллекторными машинами и преобразователями частоты
Откройте для себя мир приводной техники maxon
Приводы maxon IDX состоят из двигателя EC-i, магнитного абсолютного энкодера (однооборотный) и контроллера позиционирования EPOS4 со встроенным управлением с ориентацией поля (FOC).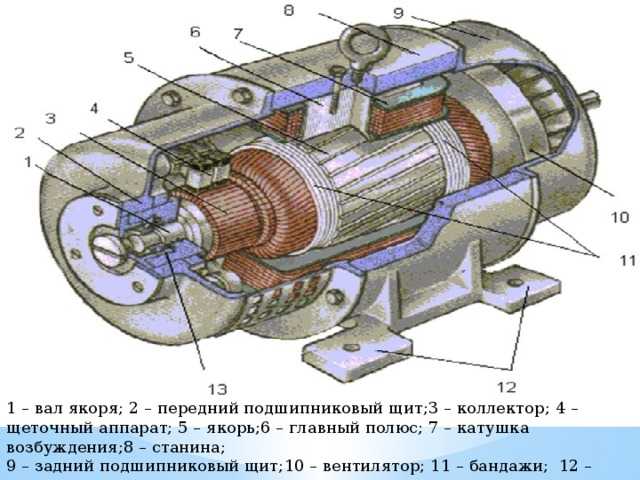 Качественный дизайн соответствует степени защиты IP65; только выходной вал должен быть уплотнен заказчиком. Встроенные датчики температуры на обмотке и в контроллере позиционирования обрабатываются непосредственно в приводе и обеспечивают оптимальное использование рабочего диапазона.
Качественный дизайн соответствует степени защиты IP65; только выходной вал должен быть уплотнен заказчиком. Встроенные датчики температуры на обмотке и в контроллере позиционирования обрабатываются непосредственно в приводе и обеспечивают оптимальное использование рабочего диапазона.
DCX 6 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Система подавления искр (CLL) превращает этот двигатель постоянного тока со щетками из драгоценных металлов в настоящего бегуна на длинные дистанции.
DCX 8 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Система подавления искр (CLL) превращает этот двигатель постоянного тока со щетками из драгоценных металлов в настоящего бегуна на длинные дистанции.
DCX 10 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Дополнительный искрогаситель (CLL) и щетки из драгоценных металлов увеличивают срок службы этого высокопроизводительного двигателя.
DCX 12 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Дополнительный искрогаситель (CLL) делает этот двигатель постоянного тока с щетками из драгоценных металлов настоящим бегуном на длинные дистанции.
DCX 14 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Система подавления искр (CLL) превращает этот двигатель постоянного тока со щетками из драгоценных металлов в настоящего бегуна на длинные дистанции.
DCX 16 предлагает шарикоподшипники с предварительным натягом или металлокерамические подшипники, щетки из графита или драгоценных металлов, искрогашение (CLL) также является дополнительным. Этот широкий диапазон конфигураций является основой для многих приложений.
DCX 19 — это настоящее чудо конфигурации. Предварительно нагруженные шарикоподшипники или металлокерамические подшипники, щетки из графита или драгоценных металлов, с CLL и т. д. — широкий выбор опций делает его пригодным для широкого спектра применений.
DCX 22 — это настоящее чудо конфигурации. Предварительно нагруженные шарикоподшипники или спеченные подшипники, щетки из графита или драгоценных металлов, опционально с CLL, фильтром электромагнитных помех и т. д. — этот широкий выбор формирует основу для широкой области применения.
DCX 26 — мощная машина. Предварительно нагруженные шарикоподшипники или спеченные подшипники, щетки из графита или драгоценных металлов с CLL — широкий выбор опций делает его пригодным для широкого спектра применений.
DCX 32 имеет графитовые щетки и шарикоподшипники с предварительным натягом. Как и в случае со всеми двигателями DCX, механические и электрические интерфейсы можно конфигурировать.
DCX 35 — это электростанция с графитовыми щетками и предварительно нагруженными шарикоподшипниками. Как и в случае со всеми двигателями DCX, механические и электрические интерфейсы можно конфигурировать.
DC-max 16 — это небольшой привод с сильными магнитами RE, новейшей технологией намотки и оптимизированной по стоимости конструкцией, который изготавливается с использованием автоматизированных производственных процессов.
DC-max 22 — это небольшой привод с сильными магнитами RE, новейшей технологией обмотки и оптимизированной по стоимости конструкцией, изготовленный с использованием автоматизированных производственных процессов.
DC-max 26 — это небольшой привод с сильными магнитами RE, новейшей технологией обмотки и оптимизированной по стоимости конструкцией, который изготавливается с использованием автоматизированных производственных процессов.
ECX SPEED 4 доступен в двух вариантах длины с датчиком Холла, энкодером или без датчика и может комбинироваться с редукторами. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 6 M доступен с датчиками Холла, энкодером или без датчика и может комбинироваться с редукторами. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 8 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 13 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 16 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 19 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 22 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX TORQUE 22 M доступен с датчиками Холла, встроенным энкодером или без датчика и может сочетаться с большим количеством редукторов. Механический интерфейс и электрическое соединение могут быть сконфигурированы. Закажите привод ECX онлайн прямо сейчас. №
Механический интерфейс и электрическое соединение могут быть сконфигурированы. Закажите привод ECX онлайн прямо сейчас. №
Бесщеточные двигатели ECX SQUARE с обмоткой без сердечника отличаются экономичной конструкцией и идеально подходят для больших партий. Пластиковый корпус и обмотка внутри заливаются за одну операцию. В результате двигатели прочны, компактны и имеют длительный срок службы. 9№ 0003
Компактный бесщеточный двигатель EC-i в сочетании с высококачественным датчиком в прочном промышленном корпусе идеально подходит для решения задач, требующих высокой скорости и позиционирования. Этот двигатель также доступен в качестве привода со встроенным регулятором позиционирования и скорости.
Редукторы GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Высокие крутящий момент и скорость, низкий уровень шума и люфта… maxon GPX 6 обладает практически всеми качествами, которые могут требоваться от редуктора.
Высокие крутящий момент и скорость, низкий уровень шума и люфта… maxon GPX 6 обладает практически всеми качествами, которые могут требоваться от редуктора.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Высокие крутящий момент и скорость, низкий уровень шума и люфта… maxon GPX 8 обладает практически всеми качествами, которые могут требоваться от редуктора.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Высокие крутящий момент и скорость, низкий уровень шума и люфта… maxon GPX 10 обладает практически всеми качествами, которые могут требоваться от редуктора.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Керамические компоненты редуктора делают его пригодным для применений, требующих превосходного крутящего момента и долговечности.
Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Керамические компоненты редуктора делают его пригодным для применений, требующих превосходного крутящего момента и долговечности.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Керамические компоненты редуктора делают его пригодным для применений, требующих превосходного крутящего момента и долговечности.
Электродвигатели постоянного тока. Основные свойства, терминология и теория
Двигатель постоянного тока преобразует электрическую энергию в механическую. В двигателе постоянного тока используется постоянный ток, другими словами, ток течет в одном направлении.
Двигатель постоянного тока обычно состоит из: сердечника якоря, воздушного зазора, полюсов и ярма, образующих магнитную цепь; обмотка якоря, обмотка возбуждения, щетки и коммутатор, образующие электрическую цепь; и рама, концевые колокола, подшипники, опоры щеток и вал, которые обеспечивают механическую поддержку. См. рисунок 8.
См. рисунок 8.
Двигатели постоянного тока имеют два основных преимущества: изменение скорости и крутящий момент.
Купить двигатели постоянного тока
Изменение скорости достигается изменением либо напряжения якоря, либо напряжения возбуждения, либо их комбинации. Например, двигатель с базовой скоростью 1750 об/мин и напряжением якоря 500 В постоянного тока будет работать со скоростью 875 об/мин при снижении напряжения якоря на 50 % (до 250 В постоянного тока).
Управление напряжением якоря — Для этого типа управления скоростью напряжение якоря изменяется при поддержании постоянного возбуждения шунтирующего поля. Выходной крутящий момент двигателя постоянного тока пропорционален произведению потока главного полюса, тока якоря и постоянной машины, которая является функцией обмоток якоря. Следовательно, при управлении скоростью вращения якоря и постоянном возбуждении шунтирующего поля момент зависит только от тока якоря. Другими словами, при номинальном токе якоря крутящий момент постоянен.
Следовательно, при управлении скоростью вращения якоря и постоянном возбуждении шунтирующего поля момент зависит только от тока якоря. Другими словами, при номинальном токе якоря крутящий момент постоянен.
Двигатель постоянного тока, работающий с регулированием напряжения якоря и возбуждением с фиксированным полем, будет развивать номинальный крутящий момент при номинальном токе якоря независимо от скорости. Обычно это называется работой с постоянным крутящим моментом.
Управление шунтирующим полем — При регулировании скорости за счет ослабления поля напряжение, подаваемое на шунтирующее поле, регулируется реостатом с переменным сопротивлением, включенным последовательно с цепью шунтирующего поля, или путем изменения напряжения источника питания шунтирующего поля.
Уменьшение напряжения возбуждения шунта уменьшает ток возбуждения, что, в свою очередь, уменьшает поток возбуждения, позволяя увеличить скорость двигателя. Нельзя использовать увеличение напряжения возбуждения для получения скорости ниже базовой, так как возбуждение будет перегреваться при токе выше номинального. Двигатели постоянного тока, работающие при постоянном напряжении якоря и с ослаблением поля, имеют постоянную мощность в лошадиных силах во всем диапазоне скоростей. Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1.
Двигатели постоянного тока, работающие при постоянном напряжении якоря и с ослаблением поля, имеют постоянную мощность в лошадиных силах во всем диапазоне скоростей. Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1.
Комбинация управления напряжением якоря и шунтирующим полем — Использование обоих методов управления скоростью обеспечивает широкий диапазон скоростей. Управление напряжением якоря используется для скоростей ниже базовой скорости, что обеспечивает постоянный крутящий момент. Управление шунтирующим полем используется для получения скоростей выше базовых, что обеспечивает постоянную мощность.
Определение электродвигателя — это устройство, которое преобразует электрическую энергию в механическую энергию. На самом деле двигатель можно было бы лучше определить как «генератор крутящего момента». Крутящий момент можно определить как вращающую силу, которая стремится произвести вращение на валу. Основное преимущество двигателя постоянного тока заключается в том, что он может развивать постоянный крутящий момент в широком диапазоне скоростей.
Основное преимущество двигателя постоянного тока заключается в том, что он может развивать постоянный крутящий момент в широком диапазоне скоростей.
Источник питания является важным фактором при использовании двигателей постоянного тока. Наиболее распространенным способом подачи постоянного напряжения на двигатель от сети переменного тока является использование электронного привода. В зависимости от конструкции привод обеспечивает форму импульса, подобную идеальному напряжению батареи. Эти импульсы характеризуются форм-фактором, который определяется NEMA (Национальной ассоциацией производителей электрооборудования) как код источника питания. Коды основаны на качестве выходной мощности. Вопросы применения включают стоимость привода, эксплуатационные расходы (эффективность), надежность и качество выходной мощности.
Код питания Nema A — этот источник питания представляет собой источник постоянного тока, такой как батарея или генератор. Высокочастотные источники питания с ШИМ будут соответствовать коду мощности NEMA A. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних дросселей.
Высокочастотные источники питания с ШИМ будут соответствовать коду мощности NEMA A. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних дросселей.
Nema Power Code C — Этот источник питания близок к чистому и состоит из шести кремниевых управляемых выпрямителей (SCRS), соединенных по трехфазной двухполупериодной мостовой схеме. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
Nema, код мощности D — мощность, код D, содержит несколько больше искажений, чем код C, и состоит из трех SCRS и трех диодных выпрямителей, соединенных по трехфазной двухполупериодной мостовой схеме. На клеммах якоря используется выпрямитель свободного хода. Двигатели мощностью 250 л.с. или менее могут работать от этого типа питания без использования внешних дросселей. Двигатели мощностью 300 л.с. и выше могут потребовать использования внешних дросселей при работе от этого типа источника питания.
Nema Power Code E — этот источник питания имеет среднее качество и состоит из трех управляемых выпрямителей (SCRS), соединенных по трехфазной полуволновой мостовой схеме. Для большинства двигателей постоянного тока потребуется некоторое снижение номинальных характеристик или использование внешнего дросселя при использовании с этим типом источника питания. Проконсультируйтесь с заводом-изготовителем, когда используется этот тип источника питания.
Nema Power Code K — этот источник питания имеет ограниченное применение и состоит из двух управляемых выпрямителей (SCR) и двух диодных выпрямителей, соединенных в однофазную двухполупериодную мостовую конфигурацию. На клеммах якоря двигателя можно использовать выпрямитель свободного хода. Этот тип источника питания обычно используется для двигателей мощностью до 7-1/2 л.с.
В промышленности обычно используются двигатели постоянного тока четырех типов: параллельные, последовательные, со смешанной обмоткой или со стабилизированным шунтом и с постоянными магнитами.
При выборе двигателя постоянного тока для данного применения необходимо учитывать два фактора:
- Допустимое изменение скорости при заданном изменении нагрузки.
- Допустимое изменение крутящего момента при заданном изменении нагрузки.
Шунтирующие двигатели — Шунтирующий двигатель имеет якорь и возбуждение параллельно или может иметь отдельные источники питания возбуждения и якоря. В любом случае этот тип двигателя имеет хорошую регулировку скорости (от 5% до 10%) и способен развивать 300% крутящего момента при полной нагрузке в течение очень короткого периода времени.
Серийный двигатель — Как следует из названия, серийный двигатель постоянного тока имеет якорь и возбуждение, соединенные в последовательную цепь. Этот тип двигателя используется там, где нагрузка требует высокого пускового момента, например, в локомотивах, кранах или буровых установках. Пусковой крутящий момент, развиваемый серийным двигателем, может достигать 500 % от номинального крутящего момента при полной нагрузке. Серийный двигатель способен обеспечить такой высокий пусковой момент благодаря тому, что его поле работает ниже насыщения. Следовательно, увеличение нагрузки приведет к увеличению как тока якоря, так и тока возбуждения. В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков возбуждения, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока.
Пусковой крутящий момент, развиваемый серийным двигателем, может достигать 500 % от номинального крутящего момента при полной нагрузке. Серийный двигатель способен обеспечить такой высокий пусковой момент благодаря тому, что его поле работает ниже насыщения. Следовательно, увеличение нагрузки приведет к увеличению как тока якоря, так и тока возбуждения. В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков возбуждения, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока. Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была полностью снята с двигателя, скорость неограниченно увеличивалась бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель. По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке.
Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была полностью снята с двигателя, скорость неограниченно увеличивалась бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель. По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке.
Двигатели с комбинированной обмоткой — Эти двигатели используются всякий раз, когда необходимо получить характеристику регулирования скорости, недостижимую ни для последовательного, ни для параллельного двигателя. Этот тип двигателя обеспечивает довольно высокий пусковой момент и обеспечивает постоянную скорость под нагрузкой. Эта характеристика достигается включением части цепи возбуждения последовательно с цепью якоря. Эту конфигурацию не следует путать с промежуточными полюсами, которые содержат всего несколько витков провода для нейтрализации реакции якоря. Когда приложена нагрузка, увеличивающийся ток через последовательную обмотку увеличивает магнитный поток, тем самым увеличивая выходной крутящий момент двигателя. В результате это увеличение потока поля приведет к большему снижению скорости при данном изменении нагрузки, чем шунтирующий двигатель.
В результате это увеличение потока поля приведет к большему снижению скорости при данном изменении нагрузки, чем шунтирующий двигатель.
Двигатели с постоянными магнитами — Двигатели с постоянными магнитами обычно используются там, где важным фактором является время отклика. Их скоростная характеристика аналогична двигателю с параллельным возбуждением. Они построены с обычным типом якоря, но имеют постоянные магниты в секции возбуждения, а не обмотки. Двигатели с постоянными магнитами считаются менее дорогими в эксплуатации, поскольку они не требуют внешнего питания. Однако они могут терять свой магнетизм с возрастом и в результате создавать крутящий момент ниже номинального. Некоторые двигатели с постоянными магнитами имеют обмотки, встроенные в магниты возбуждения для повторного намагничивания.
Открытые неизолированные компоненты двигателей постоянного тока (коллектор, щеточная оснастка, болтовые соединения) уязвимы для раннего электрического отказа, когда корпус не соответствует требованиям, независимо от системы изоляции. Очень многие загрязняющие вещества, влажные или сухие, являются отличными проводниками, например, углерод, металлическая пыль и соли кислот. Точно так же все влажное проводит ток довольно хорошо даже при низком напряжении на расстоянии в несколько дюймов. Обычные масляные пары, присутствующие в большинстве атмосфер, постепенно оседают на всех поверхностях. На этих липких поверхностях затем накапливаются загрязнения, которые начинают просачиваться, замыкая или заземляя токи. Такой малый ток утечки может продолжаться годами, не приводя к фактическому отказу машины. При соблюдении определенных условий утечка становится чрезмерной, и машина может выйти из строя почти сразу.
Очень многие загрязняющие вещества, влажные или сухие, являются отличными проводниками, например, углерод, металлическая пыль и соли кислот. Точно так же все влажное проводит ток довольно хорошо даже при низком напряжении на расстоянии в несколько дюймов. Обычные масляные пары, присутствующие в большинстве атмосфер, постепенно оседают на всех поверхностях. На этих липких поверхностях затем накапливаются загрязнения, которые начинают просачиваться, замыкая или заземляя токи. Такой малый ток утечки может продолжаться годами, не приводя к фактическому отказу машины. При соблюдении определенных условий утечка становится чрезмерной, и машина может выйти из строя почти сразу.
Перегрев — Перегрузка — это только одна из причин проблем с перегревом. Высокие температуры окружающей среды или неправильная очистка фильтров на самой машине способствуют сокращению срока службы за счет повышения рабочих температур. Это, в свою очередь, вызывает аномально высокое дифференциальное напряжение расширения, приводящее к трещинам в изоляции, которые обычно распространяются на оголенный проводник, открывая цепь из-за загрязнения. Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые дают усадку и твердеют, а затем постепенно теряют как прочностные, так и изоляционные характеристики. Температура окружающей среды выше 40°C также вредна для смазки, кабелей, щеток и коммутации.
Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые дают усадку и твердеют, а затем постепенно теряют как прочностные, так и изоляционные характеристики. Температура окружающей среды выше 40°C также вредна для смазки, кабелей, щеток и коммутации.
Загрязнение — Непроводящие загрязняющие вещества, такие как фабричная пыль и песок, постепенно способствуют перегреву, ограничивая циркуляцию охлаждающего воздуха. Кроме того, они могут разрушить изоляцию и лак, что постепенно снижает их эффективность.
Проводящие загрязняющие вещества, такие как металлическая пыль, карборунд, углерод и соль, не только способствуют перегреву, но и создают непосредственные проводящие пути для замыкания или заземления токов утечки везде, где есть контакт с электрической цепью. Нормальное дифференциальное расширение, вращательные напряжения и тепловое расширение захваченного воздуха в пустотах внутри системы изоляции в конечном итоге размыкают изолированную цепь в непредсказуемых местах. В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.
В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.
Масляные отложения способствуют легкому прилипанию загрязняющих веществ к внутренним изолированным и открытым неизолированным поверхностям, что способствует возникновению проблем в начале срока службы.
Вода от брызг или конденсации серьезно разрушает систему изоляции. Только вода проводит. Непроводящие загрязнения легко превращаются в проводники тока утечки. Прерывистая или случайная влажность в конечном итоге приводит к отказу в обслуживании, потому что последовательные ситуации утечки постепенно создают постоянный путь для продолжения разрушительных токов короткого замыкания или заземления.
Вибрация — Высокая вибрация усугубляет проблемы со сроком службы, подвергая вал нагрузке, что в конечном итоге приводит к фактическому короткому замыканию проводников между витками или между слоями. Кроме того, сильное напряжение вызывает трещины и трещины в изоляции проводника, что приводит к повреждению электрической цепи из-за загрязнения. Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Длительная сильная вибрация вызывает усталость металлов и может привести к выходу из строя литья или подшипников.
Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Длительная сильная вибрация вызывает усталость металлов и может привести к выходу из строя литья или подшипников.
Высота над уровнем моря — Стандартные характеристики двигателя основаны на работе на любой высоте до 3300 футов (1000 метров). Все высоты до 3300 футов включительно считаются такими же, как уровень моря. Снижение номинальных характеристик на большой высоте требуется из-за более низкой плотности воздуха, что требует большего охлаждения. Двигатели постоянного тока снижаются на 3% на каждые 1000 футов выше 3300 футов. В некоторых случаях для охлаждения двигателя будет достаточно вентилятора вместо использования двигателя с большей рамой.
Температура окружающей среды — Двигатели для использования в местах с аномально высокой температурой обычно рассчитаны на более высокую температуру окружающей среды за счет меньшего повышения температуры обмотки. Если температура окружающей среды выше 50°C, необходимо также обратить особое внимание на смазку. Несмотря на то, что возможна работа при температуре окружающей среды выше 50°C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.
Если температура окружающей среды выше 50°C, необходимо также обратить особое внимание на смазку. Несмотря на то, что возможна работа при температуре окружающей среды выше 50°C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.
Как правило, самый простой способ снижения номинальных характеристик при высоких температурах окружающей среды — это снижение номинальной мощности и работа двигателя при ослаблении поля. Таким образом, и якорь, и поле будут работать при пониженном токе. Для температуры окружающей среды ниже 40°C обычно используется стандартная машина с температурой 40°C при номинальной нагрузке. В случае, когда температура окружающей среды поддерживается значительно ниже 40°C, при перегрузке может использоваться стандартный двигатель, работающий в условиях окружающей среды, при условии, что известны следующие факторы:
- Известно, что окружающая среда всегда низкая
- Напряжения вала, нагрузка на подшипники и коммутация одобрены заводом
- Доступна и используется защита двигателя от перегрузки или заклинивания
Эксплуатация двигателей при температуре окружающей среды ниже O°C приводит к тяжелым нагрузкам на составные части машины. Особое внимание уделяется системе смазки и системе изоляции.
Особое внимание уделяется системе смазки и системе изоляции.
Доступен широкий ассортимент двигателей постоянного тока, включая взрывозащищенные, моющиеся и с подъемным магнитом мощностью от 1/50 до 500 лошадиных сил и от 5 до 40 киловатт. Прежде чем сделать окончательный выбор, проконсультируйтесь со специалистом по применению двигателей. Правильный выбор двигателя может сэкономить энергию и со временем снизить затраты на эксплуатацию вашей системы.
Общее руководство по техническому обслуживанию двигателей постоянного тока
Программа технического обслуживания двигателей постоянного тока представляет собой график профилактического и корректирующего обслуживания, который охватывает проверки, очистку, испытания, замену и смазку, необходимые для обеспечения надлежащей работы двигателей постоянного тока и связанного с ними оборудования. Программу технического обслуживания довольно легко разработать и внедрить. 1 После того, как регулярные проверки технического обслуживания будут включены в график работы магазина, они вскоре станут прозрачными, но при этом позволят значительно сократить расходы, помимо затрат времени и материалов на их обслуживание.
Обзор
Вкратце, программа технического обслуживания двигателя постоянного тока (таблица 1) начинается с просмотра истории обслуживания двигателя. 2 Этот обзор может выявить текущие проблемы, которые являются неотъемлемой частью самого двигателя, а также внешние условия (например, перегрузки, дисбаланс, неправильное применение), которые неблагоприятно влияют на нормальное рабочее состояние двигателя. 3 После просмотра истории обслуживания необходимо провести визуальный осмотр для выявления любого очевидного износа, засорения охлаждающих вентиляторов или загрязнения окружающей среды (влажность или коррозия). Эту проверку также следует проводить после разборки двигателя для обнаружения признаков неисправности компонентов, таких как сгоревшие обмотки, оборванные провода и т. д. Затем следует проверить обмотки двигателя. Для большинства ремонтных мастерских это проверка изоляции заземления. 4 Поскольку коллектор и щеточный узел являются быстроизнашиваемыми деталями двигателя постоянного тока, на осмотр, ремонт или замену этих жизненно важных компонентов необходимо потратить дополнительное время. Наконец, следует провести осмотр подшипников; изношенные или шумные подшипники требуют замены. Если герметичные подшипники, не требующие смазки, не используются, двигатель необходимо смазать, а затем снова собрать. 5 Перед отправкой двигателя из ремонтной мастерской необходимо провести эксплуатационные испытания.
Наконец, следует провести осмотр подшипников; изношенные или шумные подшипники требуют замены. Если герметичные подшипники, не требующие смазки, не используются, двигатель необходимо смазать, а затем снова собрать. 5 Перед отправкой двигателя из ремонтной мастерской необходимо провести эксплуатационные испытания.
Таблица 1: Программа технического обслуживания двигателей постоянного тока
6| Вытрите пыль, грязь, масло и т. д. | Ежемесячно |
| Очистка вентиляционных экранов и вентиляторов | Ежеквартально |
| Смажьте подшипники (если применимо) | Полугодовой |
| Пропылесосьте или продуйте внутреннюю часть | Полугодовой |
| Проверить коллектор, провода щеток | Полугодовой |
| Проверить натяжение пружины щетки | Полугодовой |
| Катушки испытательного поля | Полугодовой |
| Испытательные обмотки якоря | Полугодовой |
| Проверить электрические соединения | Полугодовой |
Краткий обзор руководства по техническому обслуживанию
В этом руководстве по техническому обслуживанию рассматриваются стандартные процедуры технического обслуживания большинства двигателей постоянного тока. Чтобы определить требования к техническому обслуживанию конкретного двигателя, техник по техническому обслуживанию должен обратиться к технической документации производителя перед выполнением технического обслуживания. Это руководство разделено на следующие подразделы:
Чтобы определить требования к техническому обслуживанию конкретного двигателя, техник по техническому обслуживанию должен обратиться к технической документации производителя перед выполнением технического обслуживания. Это руководство разделено на следующие подразделы:
- Просмотр истории обслуживания
- Проверка уровня шума и вибрации
- Визуальный осмотр
- Испытания обмоток
- Обслуживание щеток и коллекторов
- Подшипники и смазка
Обзор истории обслуживания
Техническое обслуживание двигателей постоянного тока, как и все виды промышленного технического обслуживания, требует предварительного планирования и составления графиков. Это начинается с просмотра истории обслуживания двигателя, обычно содержащейся в журнале обслуживания оборудования, или, если журнал недоступен, опроса клиента, оператора или ответственной стороны, чтобы определить, какой тип обслуживания требуется, профилактическое или корректирующее (ремонт при отказе).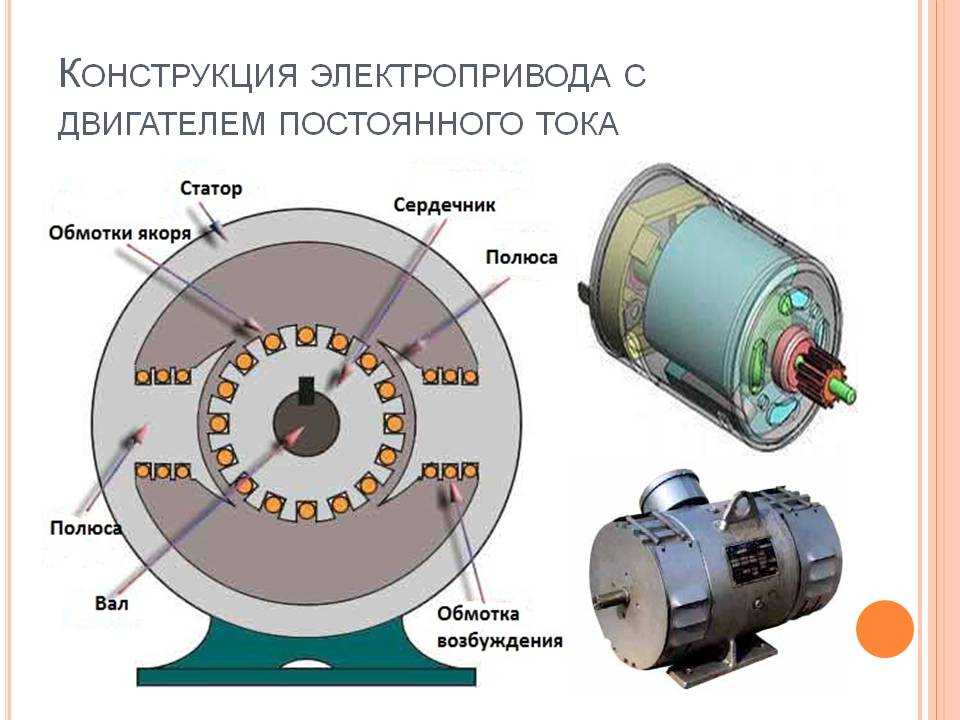 7 Цель состоит в том, чтобы определить:
7 Цель состоит в том, чтобы определить:
- Какое техническое обслуживание требуется.
- Какой обслуживающий персонал необходим для выполнения обслуживания (уровень квалификации).
- Какие детали необходимы для выполнения технического обслуживания (например, подшипники, щетки и т. д.)
- Какое планирование или координация с другими отделами требуется для выполнения технического обслуживания (планирование простоев или нерабочих часов) 8
- Какие существуют угрозы безопасности, которые могут помешать техническому обслуживанию.
- Если есть проблемы, отличные от самого двигателя, вызвавшие поломку двигателя.
Проверки на шум и вибрацию
Перед отсоединением двигателя и отправкой его в мастерскую или ремонтную мастерскую для технического обслуживания необходимо провести проверку на шум и вибрацию. Это требует, чтобы двигатель был подключен к ведомой нагрузке, находился под напряжением и нормально работал (если это возможно). Наличие механических шумов или вибраций может указывать на множество проблем, таких как механический и/или электрический дисбаланс, несоосность, дребезг щеток, неисправные подшипники, погнутые валы, механически ослабленные обмотки (например, из-за чрезмерной вибрации) или просто ослабленный вентилятор охлаждения или что-то застряло внутри вентиляционных отверстий или кожуха. Если обмотки ослаблены, после разборки проверьте изоляцию и повреждение выводов. 9 Вибрации также могут быть основной причиной перегрева и искрения щеток.
Наличие механических шумов или вибраций может указывать на множество проблем, таких как механический и/или электрический дисбаланс, несоосность, дребезг щеток, неисправные подшипники, погнутые валы, механически ослабленные обмотки (например, из-за чрезмерной вибрации) или просто ослабленный вентилятор охлаждения или что-то застряло внутри вентиляционных отверстий или кожуха. Если обмотки ослаблены, после разборки проверьте изоляцию и повреждение выводов. 9 Вибрации также могут быть основной причиной перегрева и искрения щеток.
Шумы и вибрации не ограничиваются механическими проблемами или дисбалансом; электрические дисбалансы, такие как разомкнутые или закороченные обмотки или неравномерные воздушные зазоры, могут вызывать шумы или вибрации. Самый простой способ устранить электрическую неисправность из-за механического дисбаланса — сначала включить двигатель, а затем отключить питание. Если шум/вибрация присутствует при отключенном питании, проблема механическая; если шум прекращается при отключении питания, проблема обычно связана с электричеством. 10
10
Визуальные проверки
Перед разборкой ознакомьтесь с технической документацией производителя по рекомендуемым проверкам или процедурам. Эта документация предоставит ценную информацию для проведения визуальных осмотров. 11
Визуальный осмотр предназначен для наблюдения и регистрации отклонений в физическом состоянии двигателя в обесточенном состоянии. Двигатель, который выглядит грязным, корродированным или имеет «изношенный» вид, указывает на то, что он эксплуатировался в неблагоприятных условиях и может иметь больше проблем, чем обычно. Эта проверка должна включать тест на «обоняние». От обмоток двигателя исходит запах гари? Запах гари исходит от изоляционного лака обмоток двигателя. 12 Если да, то это указывает на проблему перегрева. В этих условиях возможно повреждение обмотки двигателя, поэтому необходимо провести испытания обмотки.
Проблемы с перегревом не обязательно могут быть связаны с двигателем; скорее, они могут быть результатом механических перегрузок, таких как заедание ведомой нагрузки или холодное масло, которое перекачивается через привод двигателя 13 , работа двигателя на низких скоростях, что приводит к недостаточному потоку охлаждающего воздуха, электрическим помехам от постоянного тока. приводы перегревают обмотки, или это может быть просто результатом загрязнения окружающей среды. Грязь действует как теплоизолятор, а тепловое повреждение является недостатком нормальной работы двигателя. Осмотрите охлаждающий вентилятор и проходы, чтобы убедиться, что они работают и не засорены соответственно. Очистите все поверхности тряпкой и продуйте или пропылесосьте проходы с помощью бытового пылесоса. Коррозия может повредить обмотки двигателя, а также создать высокое сопротивление проводных соединений. Если коррозия носит хронический характер, может потребоваться перемотка двигателя, если испытания обмотки подтвердят, что обмотка повреждена. Также может потребоваться переустановка клемм клеммной коробки двигателя.
приводы перегревают обмотки, или это может быть просто результатом загрязнения окружающей среды. Грязь действует как теплоизолятор, а тепловое повреждение является недостатком нормальной работы двигателя. Осмотрите охлаждающий вентилятор и проходы, чтобы убедиться, что они работают и не засорены соответственно. Очистите все поверхности тряпкой и продуйте или пропылесосьте проходы с помощью бытового пылесоса. Коррозия может повредить обмотки двигателя, а также создать высокое сопротивление проводных соединений. Если коррозия носит хронический характер, может потребоваться перемотка двигателя, если испытания обмотки подтвердят, что обмотка повреждена. Также может потребоваться переустановка клемм клеммной коробки двигателя.
Проверка обмоток двигателя
После того, как двигатель разобран и проведен тщательный осмотр внутренних компонентов, проводится проверка обмоток двигателя. Вот где история технического обслуживания может доказать свою ценность. Какая история обслуживания зарегистрирована в отношении отказов или отклонений от нормы обмоток? Мотор когда-нибудь перематывали? Если да, то в чем причина отказа? Эта информация предполагает, какие испытания обмотки двигателя необходимы. В некоторых ситуациях может потребоваться проведение испытаний обмотки двигателя помимо проверки изоляции заземления (мегомметром). Есть ли признаки перегрева обмоток? Это может проявляться в виде следов ожогов, трещин или, в случае катастрофы, оголенного провода. Серьезные повреждения потребуют перемотки двигателя.
В некоторых ситуациях может потребоваться проведение испытаний обмотки двигателя помимо проверки изоляции заземления (мегомметром). Есть ли признаки перегрева обмоток? Это может проявляться в виде следов ожогов, трещин или, в случае катастрофы, оголенного провода. Серьезные повреждения потребуют перемотки двигателя.
Еще раз проверьте физическое состояние обмоток. Если они загрязнены или покрыты коррозией, очистите обмотки щеткой, горячей водой с моющими средствами и пылесосом. 14 Прежде чем использовать какие-либо растворители или моющие средства, проверьте документацию производителя, чтобы убедиться, что они не повредят изоляцию. Избегайте использования сжатого воздуха, так как под действием силы воздуха частицы могут попасть в изоляцию обмотки и повредить ее. Есть ли влага на обмотках? В этом случае перед проведением любых испытаний обмотки обмотки должны быть тщательно высушены. Влажные или мокрые обмотки, как правило, дают ложные показания при проведении испытаний изоляции, поэтому обмотки должны быть предварительно высушены.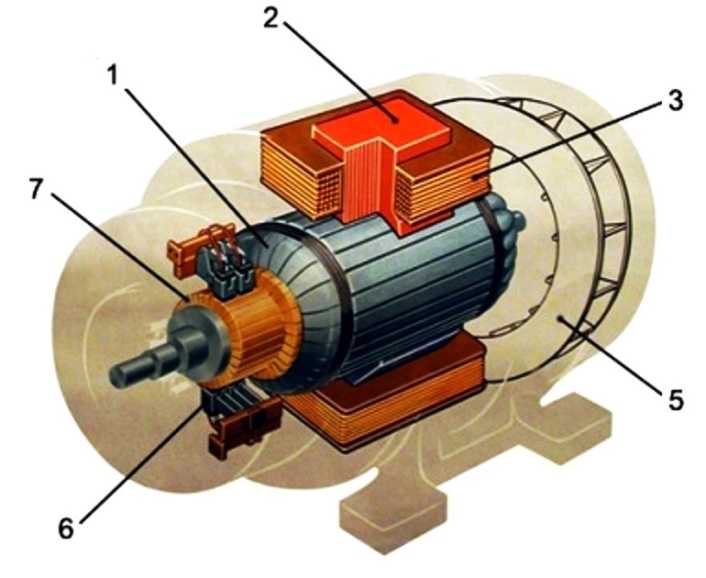 Это делается путем запекания обмоток двигателя в печи до тех пор, пока сопротивление изоляции не станет не менее 10 МОм. Конкретные требования см. в технической документации производителя. Если это не сработает, сначала рассмотрите возможность повторного лакирования двигателя. 15 Если двигатель прошел испытания изоляции, это адекватное решение. В противном случае потребуется перемотка, работа, которая выходит за рамки возможностей большинства мастерских общего обслуживания.
Это делается путем запекания обмоток двигателя в печи до тех пор, пока сопротивление изоляции не станет не менее 10 МОм. Конкретные требования см. в технической документации производителя. Если это не сработает, сначала рассмотрите возможность повторного лакирования двигателя. 15 Если двигатель прошел испытания изоляции, это адекватное решение. В противном случае потребуется перемотка, работа, которая выходит за рамки возможностей большинства мастерских общего обслуживания.
Стандартным способом проверки изоляции обмотки является испытание мегомметром 16 , при котором на двигатель подается постоянное напряжение, обычно 500 или 1000 вольт, и измеряется сопротивление изоляции. Минимальное сопротивление изоляции относительно земли составляет 1 МОм на кВ номинальной мощности плюс 1 МОм при температуре окружающей среды 40 градусов Цельсия 17 . Обычны измерения 50 МОм и более. 18 Значения сопротивления зависят от размера двигателя, типа провода и т. д. Конкретные значения сопротивления изоляции заземления см. в документации производителя. Одно предостережение относительно проверки изоляции заземления с помощью мегомметра: значения могут различаться, поэтому проводите несколько тестов в течение определенного периода времени. Низкие показания указывают на проблему, которую необходимо исследовать. Проверка изоляции заземления не является комплексной проверкой изоляции двигателя; он, например, не проверяет сопротивление изоляции между витками обмоток. Для проверки пробоя изоляции между катушками или между витками потребуется испытание высоким импульсом, испытание Hipot, для которого требуется специальное испытательное оборудование 19
д. Конкретные значения сопротивления изоляции заземления см. в документации производителя. Одно предостережение относительно проверки изоляции заземления с помощью мегомметра: значения могут различаться, поэтому проводите несколько тестов в течение определенного периода времени. Низкие показания указывают на проблему, которую необходимо исследовать. Проверка изоляции заземления не является комплексной проверкой изоляции двигателя; он, например, не проверяет сопротивление изоляции между витками обмоток. Для проверки пробоя изоляции между катушками или между витками потребуется испытание высоким импульсом, испытание Hipot, для которого требуется специальное испытательное оборудование 19
Обслуживание щеток и коллектора
Щетки и коллектор являются неотъемлемой частью нормальной работы двигателя постоянного тока. Щетки 20 перемещаются или скользят по вращающемуся коллектору якоря; при включении двигателя должен быть небольшой шум щеток, дребезжание или искрообразование. 21 Чрезмерный износ щеток или выкрашивание являются признаками неправильной коммутации двигателя, что может быть вызвано различными факторами. В обесточенном состоянии поверните якорь вручную, чтобы убедиться, что щетки свободно перемещаются по коллектору и достаточно ли натянута пружина 22 , чтобы они не отрывались от коммутатора. 23 Хорошая щетка должна иметь полированную поверхность, что свидетельствует о правильной посадке. 24 Проверьте соединения щеток, убедитесь, что они затянуты и чисты. Определите, правильно ли выровнены кисти. Отклонение от нейтрали может вызвать искрение (реакция якоря). Щетки должны располагаться на одинаковом расстоянии вокруг коллектора и параллельно стержням. Удалите мусор вокруг щеток. Сравните щетки с новым набором щеток, чтобы оценить степень износа. Если они чрезмерны или вы считаете, что они не прослужат до следующего технического обслуживания, замените их.
21 Чрезмерный износ щеток или выкрашивание являются признаками неправильной коммутации двигателя, что может быть вызвано различными факторами. В обесточенном состоянии поверните якорь вручную, чтобы убедиться, что щетки свободно перемещаются по коллектору и достаточно ли натянута пружина 22 , чтобы они не отрывались от коммутатора. 23 Хорошая щетка должна иметь полированную поверхность, что свидетельствует о правильной посадке. 24 Проверьте соединения щеток, убедитесь, что они затянуты и чисты. Определите, правильно ли выровнены кисти. Отклонение от нейтрали может вызвать искрение (реакция якоря). Щетки должны располагаться на одинаковом расстоянии вокруг коллектора и параллельно стержням. Удалите мусор вокруг щеток. Сравните щетки с новым набором щеток, чтобы оценить степень износа. Если они чрезмерны или вы считаете, что они не прослужат до следующего технического обслуживания, замените их.
Коллектор 25 должен быть гладким, полированным, коричневым. Не должно быть канавок, царапин или задиров. Если на коллекторе есть почерневшие, шероховатые участки, это, вероятно, вызвано искрением щеток. Если коллектор имеет латунный вид, это свидетельствует о чрезмерном износе, который может быть вызван неправильным типом щетки или неправильным натяжением пружины. Проверьте техническую документацию производителя, чтобы убедиться, что установлены правильные щетки. Углеродная пыль и мусор от щеток могут вызвать искрение и повредить коллектор. Если коллектор шероховатый и стержни неровные, его нужно будет обточить на токарном станке, чтобы восстановить округлость. Для очистки коллектора используйте щетку для чистки коллектора (стекловолокно) и немного очистителя электродвигателя. Никогда не используйте наждачную бумагу, потому что в ней есть частицы металла, стирание которых может вызвать короткое замыкание. Снимите пружины щеток, проведите щеткой по кожуху коллектора и распылите. Когда закончите, продуйте двигатель, чтобы он был сухим и чистым. 26
Не должно быть канавок, царапин или задиров. Если на коллекторе есть почерневшие, шероховатые участки, это, вероятно, вызвано искрением щеток. Если коллектор имеет латунный вид, это свидетельствует о чрезмерном износе, который может быть вызван неправильным типом щетки или неправильным натяжением пружины. Проверьте техническую документацию производителя, чтобы убедиться, что установлены правильные щетки. Углеродная пыль и мусор от щеток могут вызвать искрение и повредить коллектор. Если коллектор шероховатый и стержни неровные, его нужно будет обточить на токарном станке, чтобы восстановить округлость. Для очистки коллектора используйте щетку для чистки коллектора (стекловолокно) и немного очистителя электродвигателя. Никогда не используйте наждачную бумагу, потому что в ней есть частицы металла, стирание которых может вызвать короткое замыкание. Снимите пружины щеток, проведите щеткой по кожуху коллектора и распылите. Когда закончите, продуйте двигатель, чтобы он был сухим и чистым. 26
Подшипники: Замена и смазка
Существуют различные типы подшипников 27 , и требуемое техническое обслуживание зависит от типа подшипника, условий эксплуатации и применения двигателя. Существуют закрытые подшипники со смазкой на весь срок службы , используемые в двигателях малой мощности, не требующих смазки. 28
Существуют закрытые подшипники со смазкой на весь срок службы , используемые в двигателях малой мощности, не требующих смазки. 28
Смазка — это только одна из трех задач технического обслуживания подшипников двигателя. Очистка, удаление и замена — другие задачи. При проверках на шум и вибрацию подшипники должны быть проверены на наличие аномальных шумов, вибраций или горячих подшипников. Тесты на «чувство» и «звук» — это простые методы оценки состояния подшипников. 29 Для проверки на ощупь при работающем двигателе прикоснитесь к корпусу подшипника. Если он очень горячий на ощупь, подшипник, вероятно, неисправен. В тесте «звук» прислушайтесь к ударам или скрежету. Если они есть, подшипники нуждаются в более тщательном осмотре и возможной замене. Для большинства типов причинами выхода из строя подшипников являются:
- Недостаточное количество масла или смазки.
- Слишком много смазки, вызывающее взбалтывание и перегрев.
- Изношенные подшипники (т. е. сломанные шарики или неровные кольца и т. д.)
- Горячий двигатель или внешняя среда.
 е. сломанные шарики или неровные кольца и т. д.)
е. сломанные шарики или неровные кольца и т. д.)Если история обслуживания свидетельствует о повторных отказах подшипников, проверьте спецификации производителя, чтобы определить, был ли установлен правильный подшипник. Если это не так, то причиной может быть внешний фактор. Перед снятием или заменой подшипника очистите корпус растворителями или промывочными маслами. Подшипники следует протирать безворсовой тряпкой. Будьте очень осторожны, чтобы грязь не попала в подшипник. Если подшипники необходимо заменить, снимите их с помощью соответствующего инструмента. Ни в коем случае нельзя использовать молотки, так как они могут повредить обоймы подшипников. Лапы съемника подшипников должны крепиться к боковой стенке внутреннего кольца или прилегающей детали.
График смазки зависит от подшипника и применения двигателя. Малые и средние двигатели с шарикоподшипниками (кроме закрытых) смазываются каждые 3-6 лет при нормальных условиях. Влажная, агрессивная или высокотемпературная среда может потребовать более частого смазывания. Надлежащая смазка имеет решающее значение для надлежащей смазки; узнайте у производителя рекомендации по маслу/смазке. Перед смазкой снимите предохранительную заглушку с нижней части корпуса, чтобы предотвратить избыточное давление во время смазки. После завершения смазки дайте двигателю поработать 5-10 минут, пока смазка не потечет из смазочного отверстия. Это удалит лишний жир. 30
Влажная, агрессивная или высокотемпературная среда может потребовать более частого смазывания. Надлежащая смазка имеет решающее значение для надлежащей смазки; узнайте у производителя рекомендации по маслу/смазке. Перед смазкой снимите предохранительную заглушку с нижней части корпуса, чтобы предотвратить избыточное давление во время смазки. После завершения смазки дайте двигателю поработать 5-10 минут, пока смазка не потечет из смазочного отверстия. Это удалит лишний жир. 30
- Брумбах, Майкл Э. и Клейд, Джеффри А.. Промышленное обслуживание. Thomson Delmar Learning., 2003. Стр. 617. ↩
- Брумбах, Майкл Э. и Клейд, Джеффри А. Промышленное обслуживание. Thomson Delmar Learning., 2003. Стр. 616. ↩
- Служба летных стандартов. Справочник техника по техническому обслуживанию авиации. Министерство транспорта США, Федеральное авиационное агентство, 2008 г., стр. 10-152. ↩
- Реннер, Дональд, и Реннер, Б. Практическое обслуживание оборудования для водоснабжения и водоотведения. Издательство Техномик, 1999. Страница 53. ↩
- Служба летных стандартов. Справочник техника по техническому обслуживанию авиации. Министерство транспорта США, Федеральное авиационное агентство, 2008 г., стр. 10-152. ↩
- Реннер, Дональд, и Реннер, Б. Практическое обслуживание оборудования для водоснабжения и водоотведения. Technomic Publishing Co., 1999. Стр. 53. ↩ .
- Брумбах, Майкл Э. и Клейд, Джеффри А. Промышленное обслуживание. Thomson Delmar Learning., 2003. Стр. 616. ↩
- Найман, Дон и Левитт, Джоэл. Планирование, планирование и координация технического обслуживания. Industrial Press, Inc., 2001. Стр. 121. ↩
- Вок, Виктор. Вибрация машин: измерение и анализ. McGraw-Hill, Inc., 1991. Стр. 169. ↩ .
- Вок, Виктор. Вибрация машин: измерение и анализ. McGraw-Hill, Inc., 1991. Стр. 169. ↩ .
- Служба летных стандартов. Справочник техника по техническому обслуживанию авиации. Министерство транспорта США, Федеральное авиационное агентство, 2008 г. , стр. 10-152. ↩
- Шульц, Джордж П. Трансформаторы и двигатели. Butterworth-Heinemann, 1989. Стр. 273. ↩ .
- Адамс, Максвелл Дж. Электробезопасность: Руководство по причинам и предотвращению опасностей, связанных с электричеством. Институт инженеров-электриков (Великобритания), 2004 г. Стр. 7. ↩
- Трейстер, Джон Э. и Штауффер, Х. Брук. Карманный справочник электрика по поиску и устранению неисправностей. Макгроу-Хилл. 2000. Стр. 104. ↩
- Стоун, Грег и др. Электрическая изоляция вращающихся машин. IEEE Press, John Wiley & Sons Publications, Inc., 2004. Стр. 81. ↩ .
- Кхандпур, Рагбир С. Поиск и устранение неисправностей электронного оборудования. McGraw-Hill, 2007. Стр. 64. ↩ .
- Agrawal, KC. Справочник по промышленной энергетике и приложениям. Butterworth-Heineman, 2001. Страница 125. ↩
- Agrawal, KC. Справочник по промышленной энергетике и приложениям. Butterworth-Heineman, 2001. Стр. 125. ↩ .
- Реннер, Дональд и Реннер, Б. Практическое обслуживание оборудования для водоснабжения и водоотведения. Technomic Publishing Co., 1999. Стр. 53. ↩ .
- Оливер, Кеннет Г. Основы промышленного электричества: руководство по обучению и обслуживанию. Industrial Press, Inc., 1991. Страницы 179-180. ↩
- Толият, Хамид А. и Климан Г. Б. Справочник по электродвигателям. Марсель Деккер, Inc., 2004. Страница 331. ↩
- Оливер, Кеннет Г. Основы промышленного электричества: руководство по обучению и обслуживанию. Industrial Press, Inc., 1991. Страницы 191. ↩
- Служба летных стандартов. Справочник техника по техническому обслуживанию авиации. Министерство транспорта США, Федеральное авиационное агентство, 2008 г., стр. 10-152. ↩
- Хаттангади А. А. Предотвращение отказов машин и оборудования. Тата МакГроу-Хилл, 2004. Стр. 383. ↩ .
- Хаттангади А. А. Предотвращение отказов машин и оборудования. Тата МакГроу-Хилл, 2004. Страница 380. ↩
- Служба летных стандартов. Справочник техника по техническому обслуживанию авиации.
 Издательство Техномик, 1999. Страница 53. ↩
Издательство Техномик, 1999. Страница 53. ↩ , стр. 10-152. ↩
, стр. 10-152. ↩ Практическое обслуживание оборудования для водоснабжения и водоотведения. Technomic Publishing Co., 1999. Стр. 53. ↩
Практическое обслуживание оборудования для водоснабжения и водоотведения. Technomic Publishing Co., 1999. Стр. 53. ↩