
| Названи | Обозначение | Описание |
| Монтажное исполнение | IMB3, IM1001 (указано значение для примера) | Основные виды монтажного исполнения: фланец, лапы, комбинированный.Крупные двигатели используют только на лапах. Современные производители часто выпускают электродвигатели комбинированные — фланец плюс съемные лапы. |
| Габарит | DM 225 L (указано значение для примера) | Цифра в названии почти любого ЭД обозначает растояние от вала до пола. Обычно принимает только стандартеные значения. |
| Мощность двигателя | кВт (киловатт),обозначается P | Механическая полезная мощность на валу электродвигателя. |
| Количество полюсов | От 2 до 8 обычно | Количеству полюсов соответствует обороты. Смотри описание ниже. |
| Частота вращения | Об/мин | Частота вращения вала (скорость) — величина, равная кол-ву полных оборотов за ед. времени. Частота вр. Асинхронного Электродвигателя (АД) непосредственно связана с количеством полюсов обмотки: 2 полюса = 3000 об/мин; 4 = 1500 об/мин; 6 = 1000 об/мин; 8 = 750 об/мин; 12 = 500 об/мин. |
| Номинальное напряжение | В (вольт), обозначается U | Напряжение трехфазных машин — это линейное напряжение, т. е. напряжение между фазами сети, к которой подключен ЭД. На общепромышленных двигателях оно обычно равно 380В или 400В и 600В. Реже используется 220 В. Высоковольтные двигатели от 6000 В |
| Номинальный ток | А (амперы), обозначается Iн | Указывается номинальный ток, равный току в обмотках двигателя при выходе на нормальный режим работы.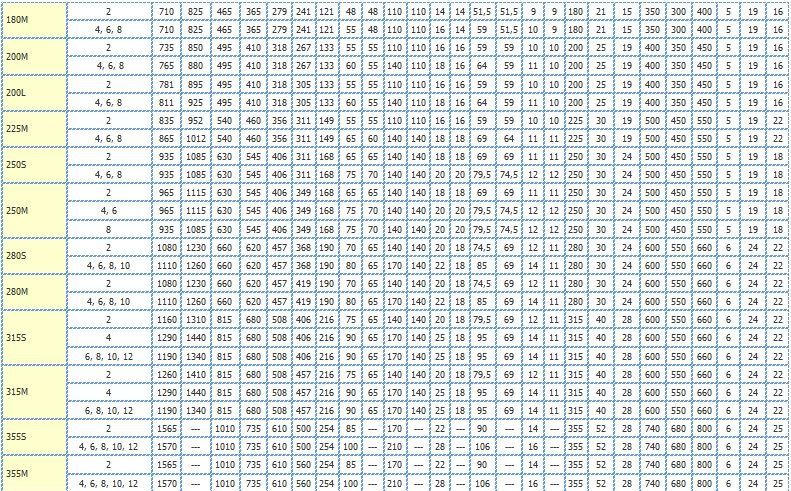 Пусковой ток всегда больше. Пусковой ток всегда больше. |
| Напряжения возбуждения (только для двигателей пост. тока) | Напряжение возбуждения всегда меньше напряжения номинального | |
| Ток возбуждения (только для двигателей пост. тока) | Ток якоря | Ток возбуждения всегда меньше тока номинального |
| КПД электродвигателя | % (процент), обозначается ƞ | Отношение полезной мех. мощности на валу ЭД к активной подводимой элект. мощности. |
| Номинальный момент силы | Н*м (Ньютон-метр), обозначается Мн | Макс. вращающий момент на валу, развиваемый ЭД в установившемся режиме при номинальных напряжении и частоте. (При соединении обмоток, согласно номин. условиям работы, и для синхронных ЭД при номин. токе возбуждения.) |
| Момент инерции | Кг*м² (килограмм на метр в квадрате) | Является мерой инертности тела во вращательном движении вокруг оси. Равно сумме моментов инерции крыльчатки и ротора электродвигателя, Простыми словами — как сложно будет затормозить вал. Равно сумме моментов инерции крыльчатки и ротора электродвигателя, Простыми словами — как сложно будет затормозить вал. |
| Момент пусковой | Н*м (Ньютон-метр), обозначается Мstart | Вращающий момент ЭД при неподвижном роторе на момент начала движения. |
| Температурный режим | Нагрев двигателя в номинальном режиме | В — предельная t 130 С F — предельная t 155 С. Н — предельная t 180 С |
| Класс изоляции | Класс нагревостойкости | Обычно бывают B F H (130 155 180 градусов соответственно). Характерезует какую температуры выдерживает обмотка. |
| Способ запуска электродвигателя | Прямой/от частотного преобразователя | Двигатели допускающие прямой пуск должны выдерживать больший нагрев, поскольку температура при пусковых токах выше при прямом пуске. |
| Режим работы | Чаще всего это S1. Этот режим допускает неприрывную работу электродвигателя и температурный баланс с окружающей средой. Если двигатель часто запускается и не успевает охладиться, это может привезти к его выходу из строя. Этот режим допускает неприрывную работу электродвигателя и температурный баланс с окружающей средой. Если двигатель часто запускается и не успевает охладиться, это может привезти к его выходу из строя. |
|
| Схема подключения питания электродвигателя | Звезда/треугольник | Переключение между звездой и треугольником приводит к уменьшению пускового тока. |
| Направления вращения | Обычно в обе стороны допускается | Если на двигателе уставлены подшипники сколжения то обычно не принципиально направление вращение. Если стоят подшипники качения то может быть допустимо только одно направление. |
| Наличие датчиков | PTC100 | Датчики устанавливают в обмотки и подшипники. Их количество зависит от габарита двигателя. |
| Расположение клеммной каробки | Справа (указано значение для примера) | Обычно заводы могут изменить расположение.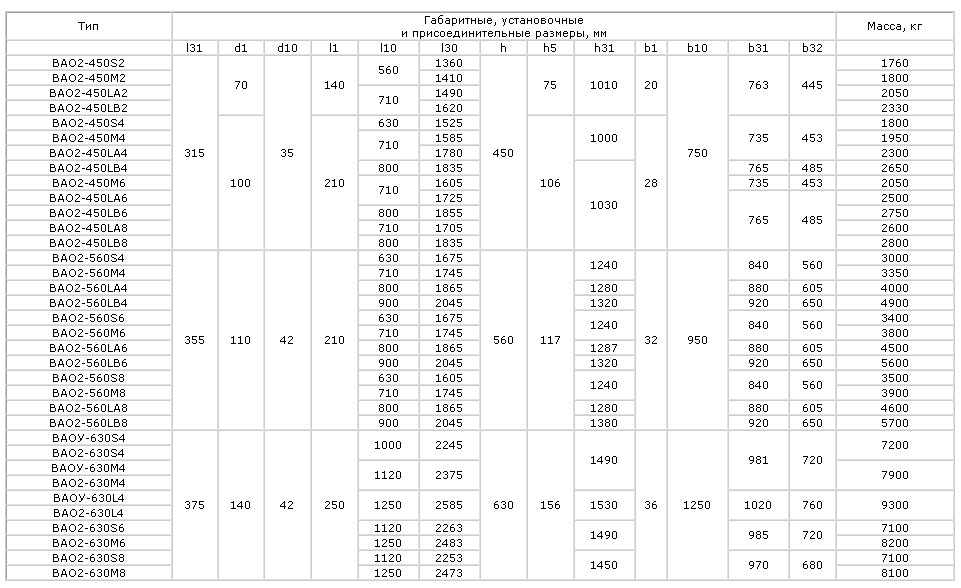 Исключение — взрывозащищенные двигателию. В взрывозащищенных двигателях вносить изменение в конструкцию сложно. По умолчание смотрят со стороны вала (ПКВ — приводный конец вала) Исключение — взрывозащищенные двигателию. В взрывозащищенных двигателях вносить изменение в конструкцию сложно. По умолчание смотрят со стороны вала (ПКВ — приводный конец вала) |
| Охлаждение | IC06 (указано значение для примера) | Описывает тиg охлаждения. Тесно связан с степенью защиты. Охлаждение воздухом из окружающей среды не может обеспечить высокой класс защиты. Поскольку с воздухом может попасть пыль и влага. Подробнее в статье |
| Степень защиты | IP23 (указано значение для примера) | Указывает на защиту двигателя от поподания твердых предметов и влаги. |
| Класс взрывозащиты | Ex — обязательно указывается на шильде | PB Ex d I — для шахт 1 Ex d IIB T4 — химическое исполнение (взрывозащищенное) |
| Наличие тормоза | Ed — добавляется к названию двигателя | Обычно тормоз можно добавить отдельно |
| Климатическое исполнение: допустимая температура и влажность | УХЛ 4 (указано значение для примера) | Применяется только в странах СНГ. Смотри в статье Смотри в статье |
| Тип подшипника | Роликовый и шариковый | При радиальных нагрузках на вал предпочтительней роликовые подшипгники |
| Смотровые окошки | Применяются для оценки износа щеток электродвигателей постоянного тока | |
| Антиканденсатная обмотка | Применятся для запуска в сложных климатических словиях |
Электродвигатели 40 кВт – характеристики, современные аналоги, размеры, асинхронных двигателей 40квт
Электродвигатели 40 кВт — устаревшее обозначение мощности электрических асинхронных двигателей с короткозамкнутыми, фазными роторами. Частота вращения поля статора 3000/1500/1000/750 об/мин. Напряжение сети питания 220/380/660 Вольт 50 Гц — трехфазное. Современные аналоги электромоторов производятся с мощностью 45 кВт:
- общепромышленные — АИР, 4А
- взрывозащищенные АИМ, АИММ, 4ВР
- крановые МТН, MTF
Популярные аналоги электродвигателей мощностью 40 кВт — асинхронные трехфазные АИР ГОСТ 31606-2012 производства Украины, Белоруссии, Китая.
Привод электродвигателей 40 квт: редукторы, насосы, лебедки, бетономешалки, дробилки, циркулярки, измельчители, пилы, прокатные станки, градирни, вентиляторы, компрессоры, краны, конвейеры, лифты, кондиционирование
промышленных помещений, прессы, эскалаторы. Для оборудования с меньшим энергопотреблением подойдут электродвигатели 37 кВт.
Каталог и технические характеристики
|
Паспортные характеристики |
Значения электродвигателей 40 кВт |
|||
|
Мощность P, кВт (современные аналоги) |
40 | |||
|
Условная частота вращения поля статора Nн, об/мин |
3000 |
1500 |
1000 |
750 |
|
Фактическая частота вращения вала Nф, об/мин |
2930 |
1460 |
970 |
730 |
|
Условный габарит мотора |
200 |
250 | ||
|
Тип сети питания, частота |
Трехфазная, 50 Гц |
|||
|
Напряжение питания UΔ/Y, Вольт |
220/380/660 |
|||
|
Принцип действия |
Асинхронный/индукционный |
|||
|
Число полюсов |
2 |
4 |
6 |
8 |
|
Степень защиты от пыли и влаги |
IP 55 |
|||
|
Класс изоляции обмотки (нагревостойкость) |
F (150 °C) |
|||
|
Режим работы |
Продолжительный — S1 |
|||
|
Климатическое исполнение и категория размещения |
У1, У2, У3, Т2 |
|||
|
Стандарт привязки мощности к габаритам |
ГОСТ 51689-2000 |
|||
|
Стандарт номинальных данных и рабочих характеристик |
ГОСТ 28173-89 |
|||
* Ознакомиться с подбробными значениями параметрам современных аналогов электродвигателей 40 кВт:
- Номинальная сила тока Iн
- Соотношение пускового тока и номинального Iп/Iн
- Коэффициент мощности cos φ и КПД
- Масса меди в обмотке (в зависимости от качества/производителя)
- Момент инерции
- Отношение максимального крутящего момента к минимальному Mmax/Mн
- Крутящий момент максимальный и номинальный
- Марки переднего и заднего подшипника
- Расшифровка маркировки бирки
- Вес и монтажные исполнения
Параметры электродвигателей 40 кВт изменяются от производителя, цены, качества.
Размеры и габариты электрических моторов АИР мощностью 40кВт
Электромоторы 40 кВт производятся в габаритах АИР200, АИР250 в привязки с стандарту «Интерэлектро». Условный габарит — высота двигателя от станины до оси вала двигателя. В таблице указаны ключевые размеры — посадочные места, длина сердечника, размеры фланцев, подшипниковых щитов.
|
Присоединительные и габаритные размеры |
Электродвигатель 40 кВт |
||||
|
Габаритные размеры электродвигателей 40 кВт |
На чертеже |
АИР200L2 |
АИР200L4 |
АИР250S6 |
АИР250М8 |
|
Длина * Ширина * Высота |
L*B*H |
770*395*505 | 780*395*505 | 845*490*615 | 920*490*615 |
|
Диаметр вала |
D4 |
55 |
60 | 75 | |
|
Длина по креплению лап |
L1 |
110 |
140 |
||
|
Высота до оси вала |
h2 |
200 |
250 |
||
|
Диаметр фланца |
D1 |
450 |
550 |
||
Подключение к сети 220/380/660 Вольт трехфазных электромоторов 40 кВт
Электродвигатель 40 кВт 750/1000/1500/3000 оборотов в минуту с заводским напряжением 220/380 Вольт на 220 В подключают к однофазной сети «треугольником» через конденсаторы. Сеть 380 В — «звездой» через контакторы, частотники.
Сеть 380 В — «звездой» через контакторы, частотники.
Напряжение двигателя 380/660 Вольт для более мощных моторов. Запуск двигателя на «звезде» (вместо номинального 660 В подают 380 В). В рабочем состоянии переключают на «треугольник». При соединение данной схемой электродвигатель работает на полную мощность.
Номинальные значения тока звездой и треугольником. Формула расчета: Рн — номинальная мощность электродвигателя (Вт) Uн — номинальное напряжение электродвигателя (В) (при соединении обмоток двигателя по схеме «звезда» — 380 В, при соединении по схеме «треугольник» — 220 В) cosфн — номинальный коэффициент мощности двигателя ηн — номинальный коэффициент полезного действия электродвигателя.
Купить асинхронный двигатель 40 кВт 3000/1500/1000/750 об/мин
Производители АИР200L2, АИР200L4, АИР250S6, АИР250М8 электродвигателей 40 кВт:
- Украина – СЛЭМЗ, НКМЕЗ, ПАО «Электромотор» Полтава, ХЭЛЗ – литые корпуса, толстый медный провод, устойчивость к кратковременным перегрузкам
- Китай – высокого качества — термический класс изоляции обмоток F — 150°С, медная обмотка шиной/проводом.
 Эконом качества — не ремонтопригодны, минимальная пропитка лаком, обмотка алюмоцинком, низкое сопротивление обмоток, минимальная гарантия
Эконом качества — не ремонтопригодны, минимальная пропитка лаком, обмотка алюмоцинком, низкое сопротивление обмоток, минимальная гарантия - Беларуси (Могилевский завод «Электродвигатель») – прочные подшипники, щиты, устойчивость к продольным/радиальным нагрузкам, запас мощности
- России (ВЭМЗ, Сибэлектромотор) – в Украине востребована продажа складского оборудования, неликвидов, после ревизии. Цена ниже новых электродвигателей 40 кВт, ремонтопригодны. В сервисных центрах СЛЕМЗ модифицируем – установка радиально-упорных подшипников, двойная пропитка изоляции лаком, установка теплового реле, контакторов, частотных преобразователей, пускателей
 Эконом качества — не ремонтопригодны, минимальная пропитка лаком, обмотка алюмоцинком, низкое сопротивление обмоток, минимальная гарантия
Эконом качества — не ремонтопригодны, минимальная пропитка лаком, обмотка алюмоцинком, низкое сопротивление обмоток, минимальная гарантияЦена двигателей 40 квт зависит от качества материалов, возможности технического обслуживания, наличия ремонтных цехов. Купить электродвигатель 40 кВт от завода с гарантией, паспортом, сервисным обслуживанием и ремонтом. Специалисты Слобожанского завода подберут электродвигатель 40кВт по бюджету, техническому заданию – назначению, напряжению, режиму работы S1 продолжительный, S2 кратковременный, S3 повторно-кратковременный, степени защиты, типу двигателя, габаритным размерам, крутящему моменту, пусковым/номинальным токам, массе меди.
Цены электродвигателей 40 квт в Украине
Цена электродвигателей 40 кВт пропорциональна качеству комплектующих деталей. Факторы, влияющие на стоимость – тип мотора (взрывозащищенный, крановый, лифтовый, общепромышленный), качество материалов, металл корпуса, масса медной обмотки, доставка импортного оборудования, монтажное исполнение лапы/фланец, подшипники скольжения, качения, шарикоподшипники, сервис-фактор, нагревостойкость. Таблица цен двигателей 40 киловатт. Для подбора, актуализации цен электродвигателей 40 кВт звоните специалистам СЛЕМЗ.
|
Производители |
Цена, грн с НДС |
||||||
| АИР200L2 | АИР200L4 | АИР250S6 | АИР250М8 |
МТН 411-8 |
АIS160L4K |
АИМ160S2 |
|
|
Китай Эконом качество |
11200 |
12900 |
15000 |
18400 |
— |
— |
16200 |
|
Китай Стандарт |
15500 |
16300 |
18900 |
24802 |
— |
— |
19236 |
|
Беларусь |
23000 |
23000 |
24302 |
32306 |
— |
25420 |
— |
|
Складское хранение |
14900 |
14200 |
15920 |
19510 |
42100 |
— |
— |
|
Украина 4АМУ |
32090 |
31980 |
35100 |
39500 |
— |
— |
— |
Сколько стоят электрические двигатели БУ?
Экономия при выборе электродвигателей 40 кВт сводится к покупке БУ оборудования, моторов с ремонта. Вероятные неисправности — недостаточное сопротивление обмоткок, перегрев и выгорание, замыкание обмоток, низкое КПД. Цена нового электродвигателя 40 кВт на 30-50 % выше, чем БУ, поломка которого влечет выход из строя дорогостоящего оборудования. У Слобожанского завода Вы сможете купить электродвигатель 40 кВт надежный, с проверкой ОТК, провести ревизию и ремонт по минимальной цене. Ремонтные мастерские СЛЭМЗ проводят полную дефектовку, ремонт посадочных мест под подшипники, перемотку проводом и шиной.
Вероятные неисправности — недостаточное сопротивление обмоткок, перегрев и выгорание, замыкание обмоток, низкое КПД. Цена нового электродвигателя 40 кВт на 30-50 % выше, чем БУ, поломка которого влечет выход из строя дорогостоящего оборудования. У Слобожанского завода Вы сможете купить электродвигатель 40 кВт надежный, с проверкой ОТК, провести ревизию и ремонт по минимальной цене. Ремонтные мастерские СЛЭМЗ проводят полную дефектовку, ремонт посадочных мест под подшипники, перемотку проводом и шиной.
Электродвигатели — общие сведения, технические показатели
Компания «ПрофТех»
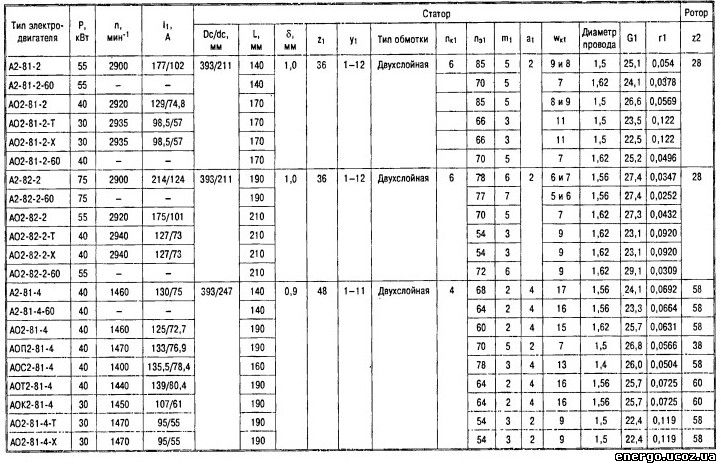
Главная \ Статьи \ Электродвигатели Ниже приведены технические показатели и основные конструктивные размеры электродвигателей, обычно применяемых для укомплектования вентиляторов и насосов в промышленных, жилых и общественных зданиях. Это — асинхронные электродвигатели трехфазного переменного тока единой серии типов А, АЛ, АО, АОЛ, МА-140 и ТАГ. Таблица 1. Выбор типа электродвигателей в зависимости от состояния воздушной среды помещений
Таблица 2.
Шкивы к электродвигателям
Шкивы типа ШР для плоскоременной передачи к электродвигателям единой серии (см. рис. 1)
Шкивы типа ШК для клиноременной передачи к электродвигателям единой серии (см.
Назад | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 По способу монтажа они относятся к горизонтальным электродвигателям со станиной на лапах.
По способу монтажа они относятся к горизонтальным электродвигателям со станиной на лапах. Технические данные и основные габаритные размеры асинхронных электродвигателей с короткозамкнутым ротором мощностью до 100 кВт
Технические данные и основные габаритные размеры асинхронных электродвигателей с короткозамкнутым ротором мощностью до 100 кВт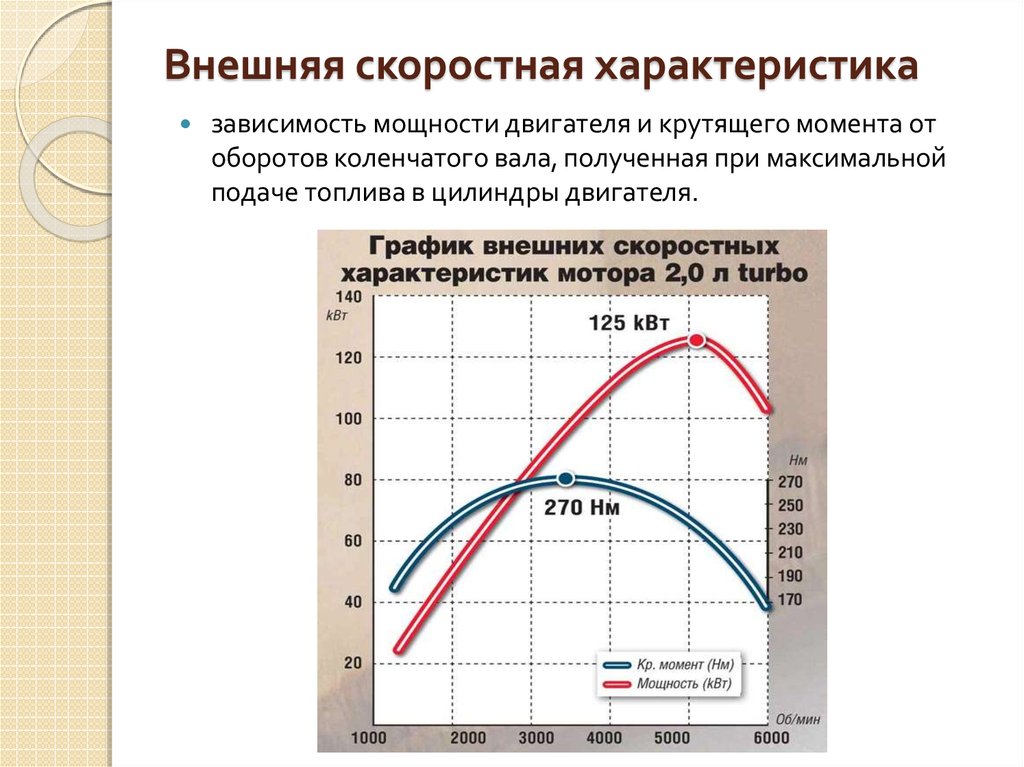 1
1 рис. 2)
рис. 2)Характеристики двигателей постоянного тока | www.
 electriceasy.com
electriceasy.com Как правило, для двигателей постоянного тока важными считаются три характеристические кривые: (i) крутящий момент в зависимости от тока якоря, (ii) скорость в зависимости от тока якоря и (iii) скорость в зависимости от крутящего момента. Они объясняются ниже для каждого типа двигателя постоянного тока. Эти характеристики определяются с учетом следующих двух соотношений.
T a ∝ ɸ.I a и N ∝ E b /ɸ
Эти вышеприведенные уравнения могут быть изучены при — ЭДС и уравнении крутящего момента машины постоянного тока. Для двигателя постоянного тока величина противо-ЭДС определяется тем же уравнением ЭДС генератора постоянного тока, то есть E б = PɸNZ / 60А. Для машины P, Z и A постоянны, поэтому N ∝ E b /ɸ
Характеристики двигателей постоянного тока серии
Крутящий момент в зависимости от тока якоря (T
a -I a ) Эта характеристика также известна как электрическая характеристика . Мы знаем, что крутящий момент прямо пропорционален произведению тока якоря на магнитный поток, T a ∝ ɸ.I a . В двигателях постоянного тока обмотка возбуждения включена последовательно с якорем, т.е. I a = I f . Поэтому до магнитного насыщения поля поток ɸ прямо пропорционален Ia. Следовательно, до магнитного насыщения Ta α Ia 2 . Следовательно, кривая Ta-Ia является параболой для меньших значений Ia.
Мы знаем, что крутящий момент прямо пропорционален произведению тока якоря на магнитный поток, T a ∝ ɸ.I a . В двигателях постоянного тока обмотка возбуждения включена последовательно с якорем, т.е. I a = I f . Поэтому до магнитного насыщения поля поток ɸ прямо пропорционален Ia. Следовательно, до магнитного насыщения Ta α Ia 2 . Следовательно, кривая Ta-Ia является параболой для меньших значений Ia.
После магнитного насыщения полюсов поля поток ɸ не зависит от тока якоря Ia. Следовательно, крутящий момент изменяется пропорционально только Ia, T ∝ Ia. Поэтому после магнитного насыщения кривая Ta-Ia становится прямой линией.
Крутящий момент на валу (Тш) меньше момента якоря (Та) из-за паразитных потерь. Следовательно, кривая Tsh vs Ia лежит несколько ниже.
В двигателях постоянного тока (до магнитного насыщения) крутящий момент увеличивается пропорционально квадрату тока якоря. Эти двигатели используются там, где требуется высокий пусковой крутящий момент.
Скорость в зависимости от тока якоря (N-Ia)
Мы знаем соотношение N ∝ E b /ɸ
При малом токе нагрузки (и, следовательно, при малом токе якоря) изменение противоЭДС Eb мало и им можно пренебречь. Следовательно, для малых течений скорость обратно пропорциональна ɸ. Как известно, поток прямо пропорционален Ia, скорость обратно пропорциональна Ia. Поэтому, когда ток якоря очень мал, скорость становится опасно высокой. это почему нельзя запускать серийный двигатель без механической нагрузки .
Но при больших нагрузках ток якоря Ia велик. И, следовательно, скорость низкая, что приводит к уменьшению обратной ЭДС Eb. Из-за уменьшения Eb допускается больший ток якоря.
Скорость в зависимости от крутящего момента (N-Ta)
Эта характеристика также называется механической характеристикой . Из приведенных выше двух характеристик двигателя постоянного тока серии можно обнаружить, что при высокой скорости крутящий момент низкий, и наоборот.
Характеристики параллельных двигателей постоянного тока
Крутящий момент в зависимости от тока якоря (Ta-Ia)
В случае шунтирующих двигателей постоянного тока можно считать, что поток поля ɸ является постоянным. Хотя при больших нагрузках ɸ несколько уменьшается из-за повышенной реакции якоря. Поскольку мы пренебрегаем изменением потока ɸ, мы можем сказать, что крутящий момент пропорционален току якоря. Следовательно, характеристика Ta-Ia для шунтового двигателя постоянного тока будет прямой линией, проходящей через начало координат.
Поскольку при большой пусковой нагрузке требуется большой пусковой ток, 9Шунтирующий двигатель 0029 никогда не должен запускаться при большой нагрузке .
Скорость в зависимости от тока якоря (N-Ia)
Поскольку поток ɸ считается постоянным, мы можем сказать, что N ∝ Eb. Но, поскольку противо-ЭДС также почти постоянна, скорость должна оставаться постоянной. Но на практике ɸ, как и Eb, уменьшается с увеличением нагрузки. Противоэдс Eb уменьшается несколько больше, чем ɸ, следовательно, скорость уменьшается незначительно. Как правило, скорость снижается только на 5–15% от скорости полной нагрузки. Таким образом, параллельный двигатель можно принять за двигатель с постоянной скоростью 9.0009 . В зависимости скорости от тока якоря на следующем рисунке прямая горизонтальная линия представляет идеальную характеристику, а фактическая характеристика показана пунктирной линией.
Но на практике ɸ, как и Eb, уменьшается с увеличением нагрузки. Противоэдс Eb уменьшается несколько больше, чем ɸ, следовательно, скорость уменьшается незначительно. Как правило, скорость снижается только на 5–15% от скорости полной нагрузки. Таким образом, параллельный двигатель можно принять за двигатель с постоянной скоростью 9.0009 . В зависимости скорости от тока якоря на следующем рисунке прямая горизонтальная линия представляет идеальную характеристику, а фактическая характеристика показана пунктирной линией.
Характеристики составного двигателя постоянного тока
Составные двигатели постоянного тока имеют как последовательную, так и шунтирующую обмотку. В составном двигателе, если последовательная и шунтирующая обмотки соединены так, что последовательный поток имеет направление, соответствующее направлению шунтирующего потока, то двигатель называется кумулятивно составным. А если последовательный поток противоположен направлению шунтирующего потока, то говорят, что двигатель имеет дифференциальную составляющую.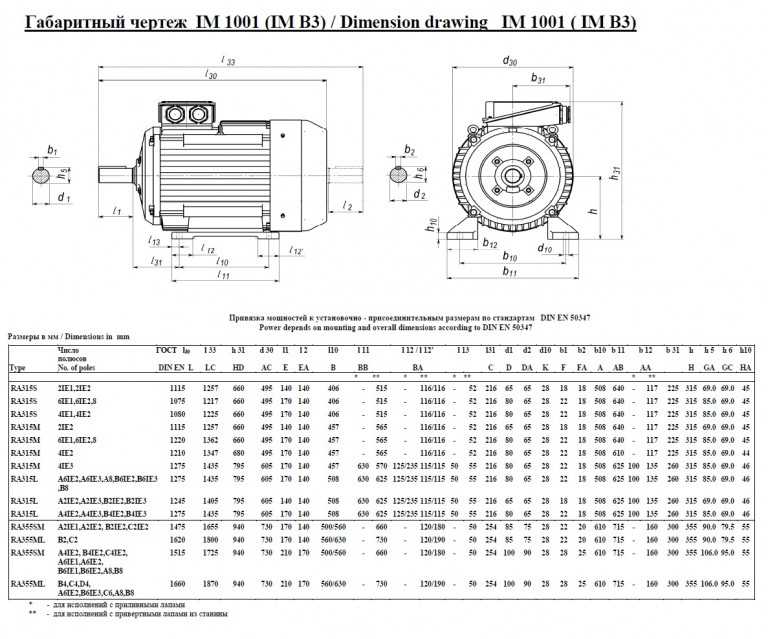 Характеристики обоих составных двигателей поясняются ниже.
Характеристики обоих составных двигателей поясняются ниже.
(a) Комбинированный накопительный двигатель
Накопительный составной двигатель используется там, где требуются последовательные характеристики, но при этом нагрузка может быть полностью снята. Последовательная обмотка обеспечивает большую нагрузку, в то время как шунтирующая обмотка предотвращает работу двигателя на опасно высоких скоростях при внезапном отключении нагрузки. В этих двигателях обычно используется маховик, к которому применяются внезапные и временные нагрузки, как в прокатных станах.
(b) Дифференциальный составной двигатель
Поскольку в двигателях дифференциального возбуждения последовательный поток противодействует шунтирующему потоку, общий поток уменьшается с увеличением нагрузки. За счет этого скорость остается почти постоянной или даже может незначительно возрастать с увеличением нагрузки (N ∝ E b /ɸ). Дифференциальные составные двигатели обычно не используются, но они находят ограниченное применение в экспериментальных и исследовательских работах.
Характеристики электродвигателей | Электротехника
ОБЪЯВЛЕНИЯ:
Для выбора надежного и экономичного двигателя необходимо хорошо знать условия эксплуатации.
Недостаточно просто указать выходную мощность в кВт и скорость, необходимо также знать следующие дополнительные данные:
(i) Крутящий момент на валу во время работы, пуска и при различных нагрузках.
ОБЪЯВЛЕНИЯ:
(ii) Ускоряющий и тормозной момент.
(iii) Частота переключения.
(iv) КПД двигателя при различных нагрузках.
(v) Другие рабочие требования.
ОБЪЯВЛЕНИЯ:
При изучении поведения двигателя, выбранного для конкретного приводимого агрегата, одной из первых проблем, связанных с этим, является определение того, соответствует ли характеристика скорости и момента двигателя требованиям, предъявляемым характеристикой скорости и момента приводимого устройства. Поведение привода в течение переходного периода пуска, торможения или переключения скорости также зависит от того, как характеристики скорости-момента двигателя и приводимого агрегата изменяются в зависимости от скорости.
Поэтому необходимо изучить эти характеристики, чтобы иметь возможность правильно выбрать двигатель и получить экономичный привод.
1. Скоростно-моментные характеристики машин или механизмов:Скоростно-моментная характеристика машины или механизма, определяемая соотношением ω = f(T L ), определяется как зависимость между скоростью, с которой она работает, и развиваемым ею моментом сопротивления или нагрузки.
Разные виды механизмов и машин имеют разные скоростно-моментные характеристики. Однако можно сделать несколько общих выводов, если использовать следующее эмпирическое уравнение для скоростно-моментной характеристики некоторого ведомого узла промышленного оборудования.0019
ОБЪЯВЛЕНИЯ:
T L =T 0 + (T rn -T 0 ) (ω/ω n ) x …(1.3)
где Т L — момент полной нагрузки (или сопротивления), развиваемый агрегатом при частоте вращения ω, к, Т 0 — момент сопротивления, развиваемый агрегатом за счет трения в его движущихся частях, Т рн — момент момент сопротивления, развиваемый агрегатом при движении с номинальной номинальной частотой вращения ω n , а x – экспоненциальный коэффициент, характеризующий изменение момента покоя при изменении скорости.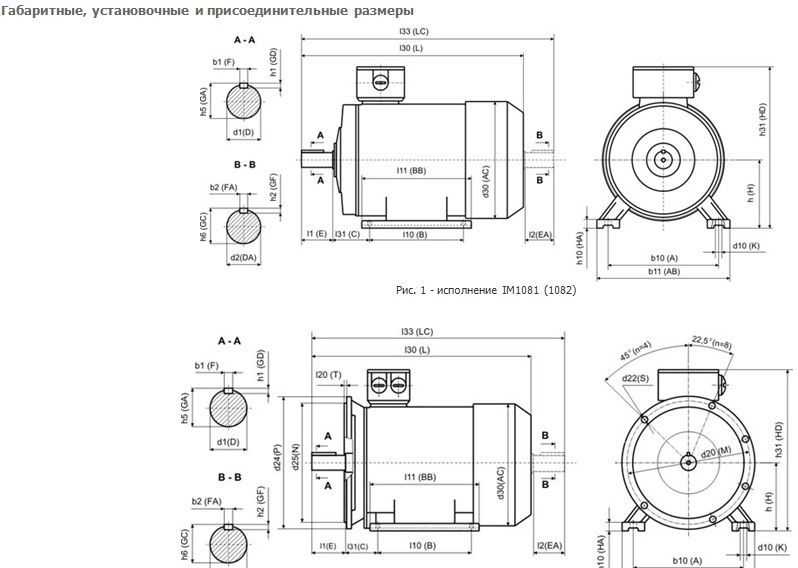
Приведенное выше уравнение (1.3) позволяет условно разделить скоростно-моментные характеристики различных видов машин и механизмов на следующие категории:
ОБЪЯВЛЕНИЯ:
я. Нагрузки, требующие постоянного крутящего момента на всех скоростях:
Такая нагрузка создает для двигателя пассивный крутящий момент, практически не зависящий от скорости. Он также характеризуется требованием дополнительного крутящего момента при скорости, близкой к нулевой. Для этой характеристики x = 0 и момента нагрузки T L не зависит от скорости. Скоростно-моментная характеристика для таких нагрузок показана вертикальной линией на рис. 1.4. Такими нагрузками являются сухое трение, краны при подъеме, лебедки, механизм подачи станков, поршневые насосы, работающие против постоянного напора, конвейеры, перекачивающие материал с постоянной массой в единицу времени. В силовых приложениях его обычно называют пусковым моментом, а в системах управления — трением (от трения прилипания).
Поскольку он меняет знак при изменении направления вращения, характеристика момента сухого трения является прерывистой, как показано на рис. 1.4.
ii. Нагрузки с линейно-возрастающей характеристикой:
ОБЪЯВЛЕНИЯ:
Такие скоростно-моментные характеристики, показанные прямой линией II на рис. 1.4, имеют каландровые машины, вихретоковые тормоза, генераторы постоянного тока с независимым возбуждением, обеспечивающие нагрузки с фиксированным омическим сопротивлением и жидкостное или вязкое трение. В этом случае x = 1 и момент нагрузки T L повышается прямо пропорционально скорости.
III. Нагрузки с нелинейно-возрастающей (параболической) характеристикой:
Для такой характеристики x = 2 и момент нагрузки T L пропорционален квадрату скорости. Такую характеристику иллюстрирует кривая III на рис. 1.4. Нагрузка со значительной силой ветра, предельным примером которой является вентилятор, имеет крутящий момент, который изменяется почти пропорционально квадрату скорости. Воздуходувки, центробежные насосы, гребные винты на кораблях или самолетах, водяные колеса, трение в трубах, напор насосов и т. д. также имеют тот же тип скоростно-крутящих характеристик.
Воздуходувки, центробежные насосы, гребные винты на кораблях или самолетах, водяные колеса, трение в трубах, напор насосов и т. д. также имеют тот же тип скоростно-крутящих характеристик.
iv. Нагрузки с нелинейной падающей (гиперболической) характеристикой (или нагрузкой постоянной мощности):
Для такой характеристики x = – 1 и момент нагрузки T L обратно пропорционален скорости, а мощность, необходимая для привода данного агрегата, остается неизменной. Такую характеристику иллюстрирует кривая IV на рис. 1.4. К этой категории нагрузок относятся отдельные виды токарных, расточных, фрезерных и других видов металлорежущих станков, сталепрокатных моталок.
Перечисленные выше категории нагрузок не охватывают все случаи, с которыми можно столкнуться на практике, но дают хорошее представление о характеристиках, типичных для очень многих видов промышленного оборудования. На практике встречаются нагрузки, представляющие собой комбинацию этих основных видов нагрузок.
Возможно, изменение момента нагрузки во времени имеет такое же или большее значение при выборе двигателя. Это изменение в некоторых приложениях может быть периодическим и повторяющимся, один цикл изменения называется рабочим циклом.
Различные типы нагрузок с точки зрения характеристик момента нагрузки можно классифицировать следующим образом:
(i) Непрерывные, постоянные нагрузки, такие как бумагоделательные машины, центробежные насосы или вентиляторы, работающие в течение длительного времени в одних и тех же условиях.
(ii) Непрерывные, переменные нагрузки, такие как подъемные лебедки, металлорежущие станки, конвейеры и т. д.
(iii) Пульсирующие нагрузки, такие как поршневые насосы и текстильные ткацкие станки и вообще все машины с коленчатым валом.
(iv) Ударная нагрузка, такая как прокатные станы, ножницы, прессы, кузнечные молоты и т. д. При таких нагрузках возникают кажущиеся, регулярные и повторяющиеся пики нагрузки или импульсы.
(v) Кратковременные нагрузки, такие как мотор-генераторы для зарядки аккумуляторов; серводвигатели, используемые для дистанционного управления зажимными штангами бурильных машин.
(vi) Кратковременные периодические нагрузки, такие как краны и подъемные механизмы, экскаваторы, роликовые поезда и т. д.
Некоторые машины (такие как шаровые мельницы) строго не относятся ни к одной из упомянутых выше категорий. Если бы такие нагрузки (шаровые мельницы, каменные дробилки и др.) характеризовались частыми ударами сравнительно небольших пиков, то правильнее было бы отнести их к разряду непрерывно-переменных нагрузок, а не к ударным нагрузкам. Иногда довольно сложно провести различие между пульсирующими нагрузками и ударными нагрузками, поскольку обе они носят периодический характер.
Один и тот же привод может быть представлен моментом нагрузки, изменяющимся либо со скоростью, либо со временем. Наиболее подходящим примером является нагрузка вентилятора, у которой крутящий момент нагрузки T L пропорционален квадрату скорости, а также представляет собой непрерывную постоянную нагрузку.
Во всех машинах с коленчатым валом, таких как поршневые насосы и компрессоры, рамные пилы и т. д., момент нагрузки зависит от углового смещения вала или ротора двигателя. Для всех таких машин момент нагрузки Т L можно разложить на две составляющие: одну постоянной величины T av , а другую переменную T L ‘, которая периодически изменяется по величине в зависимости от углового положения вала. Такие характеристики момента нагрузки можно для простоты представить в виде ряда Фурье в виде суммы колебаний основной и гармонической частот, т. е.
Где θ = ωt, ω — угловая скорость вала двигателя, приводящего в движение компрессор.
При изменении скорости происходят лишь небольшие отклонения от фиксированного значения скорости ω a , поэтому перемещение можно представить как θ = (ω a + Δω)t. Таким образом, переменная часть крутящего момента нагрузки может быть представлена как:
Член r∆ωt, являющийся очень малым по величине, можно пренебречь.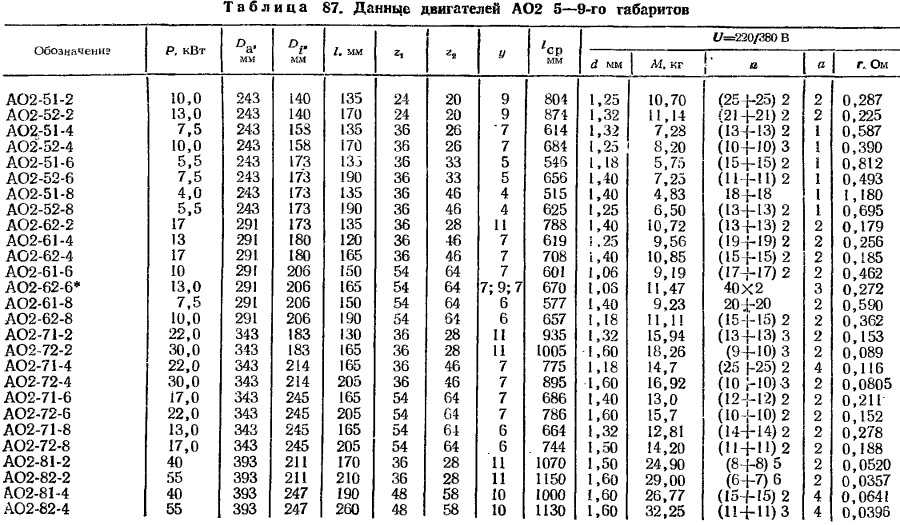 Таким образом, ограничиваясь малыми отклонениями по углу от положения равновесия, момент нагрузки, изменяющийся при угловом перемещении вала, может быть преобразован в момент, периодически меняющийся по отношению к валу. время.
Таким образом, ограничиваясь малыми отклонениями по углу от положения равновесия, момент нагрузки, изменяющийся при угловом перемещении вала, может быть преобразован в момент, периодически меняющийся по отношению к валу. время.
В статье 1.9.1. учитывались изменяющиеся со скоростью моменты нагрузки. Однако как в подъемных механизмах, так и в транспортных системах существуют моменты нагрузки, зависящие не только от скорости, но и от характера пути, проходимого грузом при его движении. Например, сопротивление движению поезда, движущегося вверх по уклону или совершающего поворот, зависит от величины уклона или радиуса кривизны пути соответственно.
Сила из-за градиента определяется как
F г = 1000 Вт sin θ кг. …(1.6)
Где W — вес поезда в тоннах.
Но в железнодорожных работах уклон выражается как подъем в метрах на пути 100 м и обозначается как «уклон в процентах» (G%)
т. е. G = Sin θ x 100
е. G = Sin θ x 100
или sin θ = G/100
Подставив sin θ = G/100 в уравнение (1.6), имеем-
Ф г = 1000 Вт × G/100 = 10 WG кг. …(1.7)
Сила тяги, необходимая для преодоления сопротивления искривлению, определяется эмпирической формулой, приведенной ниже:
F c = 700 000 Вт/Р кг …(1,8)
Где R — радиус кривизны в метрах.
В грузоподъемных механизмах, в которых не используются хвостовые канаты или уравновешивающие канаты (рис. 1.7), момент нагрузки создается не только весом ненагруженной или загруженной клети, но и грузоподъемными канатами или тросами, которые зависит от положения двух клеток. Когда клетка 1 находится в крайнем нижнем положении и должна быть поднята вверх, весь вес веревки также должен быть перемещен вверх.
Когда обе клетки находятся на одной высоте, вес поднимаемой веревки становится равным нулю, так как вес веревок с обеих сторон уравновешивает друг друга, имея одинаковую длину. Когда клетка 1 находится выше клетки 2, часть веса веревки действует таким образом, чтобы способствовать движению клетки 1 вверх. В конечном счете, когда клетка 1 достигает самого верхнего положения, весь вес веревка помогает движению вверх.
Когда клетка 1 находится выше клетки 2, часть веса веревки действует таким образом, чтобы способствовать движению клетки 1 вверх. В конечном счете, когда клетка 1 достигает самого верхнего положения, весь вес веревка помогает движению вверх.
Сила сопротивления движению груза вверх, F r в связи с различной массой каната в зависимости от положения груза принимается как-
Где, W r — общий вес каната в кг, h — желаемая максимальная высота, на которую клеть должна быть перемещена вверх, в метрах, а x — высота клети в любом произвольном положении от дна наибольшая позиция в метрах.
При больших значениях h сила F r в значительной степени влияет на работу привода, используемого в грузоподъемных механизмах, поскольку в такой ситуации вес каната может быть значительно больше, чем вес поднимаемого груза вверх. Если мы используем хвостовые канаты, как показано пунктирными линиями на рис. 1.7, вес соединительного каната может быть уравновешен, и движение клеток может быть почти плавным.
5. Скоростные характеристики электродвигателя:
Моментно-скоростная характеристика двигателя определяется как отношение между скоростью, с которой он работает, и развиваемым им крутящим моментом, т. е. ω = f(T).
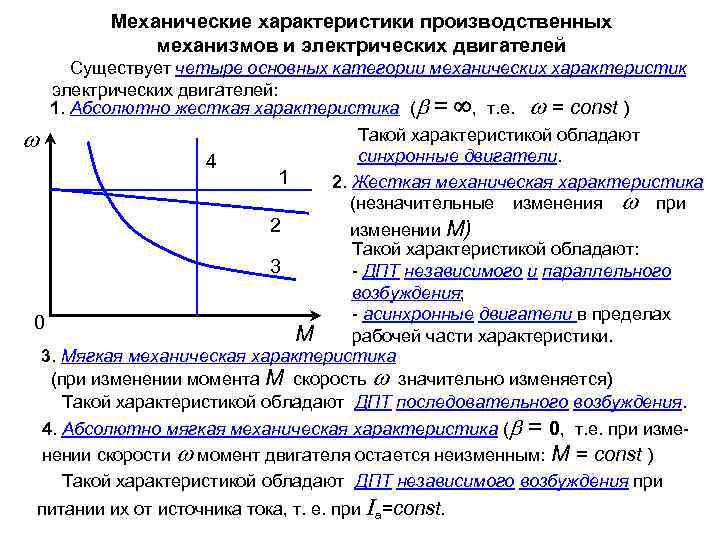
Практически все электродвигатели — параллельные, последовательные, составные двигатели постоянного тока, асинхронные двигатели с короткозамкнутым ротором и контактными кольцами, а также коллекторные двигатели переменного тока имеют падающую скоростно-моментную характеристику, т. е. их скорость падает с увеличением момента нагрузки. Однако степень изменения скорости с изменением момента у различных типов двигателей различна, что характеризуется так называемой жесткостью их скоростно-моментной характеристики.
Скоростно-моментные характеристики электродвигателя можно разделить на три основные группы:
1. Абсолютно жесткая (плоская) характеристика скорости и крутящего момента:
Характеристика, не демонстрирующая изменения скорости при изменении момента нагрузки. С такой характеристикой работают синхронные двигатели (горизонтальная прямая I на рис. 1.8).
С такой характеристикой работают синхронные двигатели (горизонтальная прямая I на рис. 1.8).
2. Жесткая характеристика скорости и крутящего момента:
Характеристика, показывающая скорость, которая незначительно падает с увеличением крутящего момента. Жесткую характеристику имеет двигатель постоянного тока с параллельным возбуждением, а также асинхронные двигатели в рабочей области скоростно-моментной характеристики (кривая II на рис. 1.8).
Характеристика скорости и момента асинхронного двигателя имеет «жесткость», которая различается в зависимости от того, какая точка характеристики принимается во внимание (рис. 1.9). Между точками максимального крутящего момента в режиме двигателя T max M и максимального крутящего момента в режиме генератора T max G асинхронная машина будет демонстрировать довольно жесткую характеристику.
3. Мягкая характеристика скорости:
Характеристика, показывающая значительное падение скорости при увеличении крутящего момента. Такой характеристикой обладает двигатель постоянного тока с последовательным возбуждением, особенно на маломоментном участке характеристики (кривая III на рис. 1.8). У таких двигателей степень жесткости характеристики меняется на всем протяжении кривой.
Такой характеристикой обладает двигатель постоянного тока с последовательным возбуждением, особенно на маломоментном участке характеристики (кривая III на рис. 1.8). У таких двигателей степень жесткости характеристики меняется на всем протяжении кривой.
Двигатели постоянного тока с составной обмоткой, в зависимости от степени жесткости их скоростно-моментных характеристик, могут рассматриваться как двигатели с жесткими или мягкими характеристиками.
6. Совместная скоростно-моментная характеристика электродвигателя:
Совместная работа электродвигателя и приводимого им агрегата, когда скорость имеет установившееся значение, соответствует условию баланса между приводным моментом двигателя и моментом сопротивления, развиваемым приводимым агрегатом при заданной скорости. Когда сопротивление или момент нагрузки, развиваемый на валу двигателя приводным агрегатом, претерпевает некоторое изменение, скорость и крутящий момент, развиваемые двигателем, автоматически изменяются, чтобы восстановить стабильную работу при новом значении скорости и момента нагрузки.
В случае неэлектрических первичных двигателей (водяная турбина, паровая турбина или дизельный/бензиновый двигатель) баланс между моментом сопротивления и крутящим моментом достигается за счет использования регулятора соответствующего типа для управления притоком энергии к первичному двигателю путем увеличение или уменьшение расхода воды, пара или топлива. В электродвигателях роль автоматического регулятора выполняет ЭДС двигателя. Эта способность электродвигателей поддерживать равновесие системы привода при изменении момента сопротивления (нагрузки), развиваемого ведомым агрегатом, чрезвычайно ценна, поскольку этот момент очень часто в той или иной степени нестабилен.
Это можно проиллюстрировать с помощью рис. 1.10, который иллюстрирует характеристику скорость-момент (кривая III) параллельного двигателя постоянного тока и две характеристики I и II производственной установки, приводимой в движение двигателем (например, конвейера). .
Характеристика I соответствует холостому состоянию конвейерной установки, а характеристика II соответствует более высокому уровню крутящего момента, развиваемого конвейером при обработке требуемого потока материала. Первоначально, в момент, когда конвейер работает на холостом ходу, момент двигателя Т = Т, а двигатель работает со скоростью ω 1 . Как только конвейер начинает поддерживать поток материала, увеличение нагрузки на двигатель приводит к торможению двигателя и снижению его скорости. Это заставляет двигатель развивать меньшую ЭДС.
Первоначально, в момент, когда конвейер работает на холостом ходу, момент двигателя Т = Т, а двигатель работает со скоростью ω 1 . Как только конвейер начинает поддерживать поток материала, увеличение нагрузки на двигатель приводит к торможению двигателя и снижению его скорости. Это заставляет двигатель развивать меньшую ЭДС.
Следовательно, ток якоря увеличивается, и двигатель начинает развивать больший вращающий момент. Момент двигателя растет до тех пор, пока не будет достигнута точка равновесия, при которой развиваемый двигателем момент равен моменту сопротивления приводимого агрегата, т. е. T = T 2 (где скорость ω 2 ). Эта новая точка также является общей как для скоростной характеристики II конвейера, так и для скоростной характеристики III двигателя.
При изучении работы двигателя и агрегата, который он приводит, иногда бывает удобно использовать так называемую совместную скоростную характеристику электропривода, представляющую собой кривую, представляющую собой алгебраическую сумму скоростно-моментной характеристики ведомого агрегата и приводного двигателя.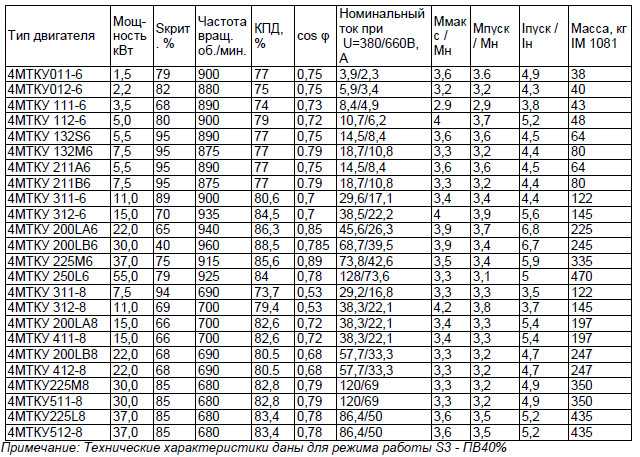
Скоростные характеристики вентилятора и приводного двигателя и совместная скоростная характеристика мотор-вентиляторного агрегата представлены кривыми I, II и III соответственно на рис. 1.11.
Когда агрегат достигает установившейся скорости ω с , двигатель работает с крутящим моментом T = крутящий момент нагрузки, T L . В этом случае крутящий момент, указанный в характеристике соединения, будет равен нулю. Работа агрегата на установившейся скорости ω s в этом случае будет считаться устойчивой, так как любое увеличение скорости приводит к отрицательному изменению (падению) момента, а любое падение скорости – к положительному изменению (росту) в крутящем моменте.
Таким образом, кривая III является примером совместной характеристики скорости и крутящего момента привода, который сможет работать стабильно. Если бы характеристика соединения имела форму кривой IV, работа не была бы стабильной, так как незначительное увеличение скорости приводит к ускорению, так как момент двигателя превышает момент нагрузки. С другой стороны, небольшое снижение скорости приводит к замедлению, поскольку крутящий момент двигателя становится меньше крутящего момента нагрузки.
С другой стороны, небольшое снижение скорости приводит к замедлению, поскольку крутящий момент двигателя становится меньше крутящего момента нагрузки.
Рассмотренные выше условия работы привода в установившемся режиме представляют собой условия, необходимые для статической устойчивости привода, и применимы только при медленном изменении скорости и крутящего момента. В периоды переходных (быстрых) изменений, связанных с динамической устойчивостью, условия устойчивости привода будут иными.
Обычно, когда электропривод проектируется под конкретный привод, заранее известна его скоростно-моментная характеристика. Таким образом, проблема достижения стабильной работы в установившемся режиме при известных скоростях и моментах нагрузки ведомого агрегата состоит в выборе двигателя, характеристика скорости и момента которого будет совместима с характеристикой ведомого агрегата.
Этого можно добиться, сначала выбрав подходящий тип двигателя, а затем соответствующим образом изменив электрические параметры его цепей. Иногда для обеспечения требуемых скоростно-моментных характеристик возникает необходимость создания специальных силовых и управляющих цепей для запутанной коммутации приводного двигателя и аппаратуры управления.
Иногда для обеспечения требуемых скоростно-моментных характеристик возникает необходимость создания специальных силовых и управляющих цепей для запутанной коммутации приводного двигателя и аппаратуры управления.
При поступательном движении активная или движущая сила F d уравновешивается силой сопротивления F r , развиваемой ведомой машиной, и силой инерции m dv/dt, возникающей из-за изменения скорости. Когда участвующее тело имеет массу m, выраженную в кг, и скорость v, выраженную в м/с, сила инерции, как и другие силы, будет выражаться в ньютонах (кг-м/с 2 ).
Уравнение равновесия сил при поступательном движении тела можно соответственно записать в следующем виде:0019
Уравнение равновесия крутящего момента при поступательном движении тела можно, соответственно, записать в следующем виде:
Приведенное выше уравнение Из (1.11) видно, что развиваемый двигателем момент T M уравновешивается противодействующим или нагрузочным моментом T L , действующим на его вал, и инерционным или динамическим моментом J (dω/dt). В приведенных выше уравнениях. В уравнениях (1.10) и (1.11) предполагается, что масса m участвующих тел и полярный момент инерции J привода остаются постоянными, что справедливо для большого числа промышленных машин и механизмов. В некоторых приводах возникает необходимость иметь дело с переменным полярным моментом инерции, как в случае кривошипно-шатунных приводов.
В приведенных выше уравнениях. В уравнениях (1.10) и (1.11) предполагается, что масса m участвующих тел и полярный момент инерции J привода остаются постоянными, что справедливо для большого числа промышленных машин и механизмов. В некоторых приводах возникает необходимость иметь дело с переменным полярным моментом инерции, как в случае кривошипно-шатунных приводов.
Из анализа уравнения. (1.11), можно определить различные состояния, в которых может оставаться электропривод, вызывающий вращательный двигатель:
1. При T M > T L , dω/dt > 0, т. е. привод будет разгоняться, в частности, набирая скорость до номинальной.
2. При T M < T L , dω/dt < 0, т.е. привод будет тормозиться и, в частности, останавливаться. Торможение, очевидно, будет происходить и при отрицательных значениях момента двигателя. Двигатель развивает отрицательный крутящий момент, когда он переходит в режим торможения.
3. Когда T M = T L , dω/dt = 0, т. е. привод будет работать с установившейся скоростью.
е. привод будет работать с установившейся скоростью.
Приведенные выше утверждения, а именно, что когда T M > T L привод ускоряется, а когда T M < T L привод замедляется, действительны только тогда, когда возникает нагрузка или сдерживающий момент T L быть пассивным крутящим моментом. Обратное может произойти при активных нагрузках крутящего момента. Например, при включении двигателя для подъема лебедки при ее опускании под собственным весом до изменения направления вращения происходит торможение привода при Т М > Т Л . В случае, если T M < T L в описанной выше ситуации, когда двигатель был включен для подъема лебедки, нагрузка будет продолжать опускаться, и двигатель будет ускоряться, а не замедляться.
Инерция или динамический момент J (dω/dt) появляются только в переходных режимах, т. е. при изменении скорости привода. При разгоне привода момент инерции противодействует движению привода, а при торможении поддерживает движение привода. Момент инерции как по величине, так и по знаку определяется как алгебраическая сумма момента двигателя и моментов сопротивления и нагрузки.
Момент инерции как по величине, так и по знаку определяется как алгебраическая сумма момента двигателя и моментов сопротивления и нагрузки.
Ввиду вышеизложенного знаки для T M и T L в уравнении. (1.11), соответствующие двигательному режиму ведущей машины и пассивному моменту нагрузки (или активному тормозному моменту) соответственно. В общем виде уравнение крутящего момента можно записать как
Выбор знака для размещения перед каждым из крутящих моментов в приведенном выше уравнении. (1.12) зависит от условий эксплуатации и характера сопротивления или момента нагрузки. Уравнение движения привода позволяет определить зависимость момента, тока, скорости и пути от времени работы в переходных режимах. Все крутящие моменты в уравнении движения должны быть отнесены к некоторому заданному элементу системы. Чаще всего к валу двигателя относят как момент нагрузки, так и динамический момент.
Пример:
Двигатель соединен с нагрузкой, имеющей следующие характеристики:
я. Двигатель: T м = 15 – 0,5ω м
Двигатель: T м = 15 – 0,5ω м
ii. Нагрузка: T l = 0,5ω 2 м
Найдите стабильную рабочую точку для этой комбинации.
Решение:
Стабильная работа будет достигнута, когда-
Т м = Т л
или 15 – 0,5ω м = 0,5ω м 2
или ω м 2 + ω м – 30 = 0
или ω м = 5 или -6
Отбрасывая минус, имеем-
ω м = 5 и T = 12,5
Итак, устойчивая рабочая точка (12.5, 5) Ответ.
Приведенные моменты нагрузки и моменты инерции: Двигатель обычно приводит в движение промышленную машину через некоторую систему трансмиссии, отдельные части которой работают с разными скоростями. При проведении практических расчетов возникает необходимость отнесения моментов и масс отдельных деталей к какому-либо удобному элементу, например к определенному валу.
Моменты нагрузки могут передаваться от одного вала к другому на основе баланса мощности системы. При этом учитывают потери мощности в промежуточных звеньях передачи путем введения соответствующих значений КПД.
Пусть скорость вала двигателя ω M , а скорость вала данной промышленной машины ω L .
На основании равенства потоков мощности имеем-
или момент нагрузки относительно вала двигателя,
, где T L — крутящий момент нагрузки, η T — КПД трансмиссии, а i — передаточное отношение скорости и равен ω M /ω L .
При наличии нескольких ступеней передачи между приводным двигателем и ведомой машиной, как схематично показано на рис. 1.12, с передаточными числами i 1 , i 2 ,…, i n и соответствующими коэффициентами полезного действия трансмиссии η Т1 , η T2 …, η Tn , крутящий момент нагрузки относительно вала двигателя определяется как-
Моменты инерции относятся к данному валу на том основании, что общее количество кинетической энергии, запасенной в движущихся частях и относящейся к данному валу, остается неизменным. С вращающимися частями, имеющими полярные моменты инерции J M , J 1 , J 2 , …, J n и угловые скорости ω M , ω 1 , ω 2 , … ω n (рис. 1.12), их динамическое действие можно заменить действием одного полярного момента инерции, отнесенного, скажем, к валу двигателя, и мы можем напишите следующие уравнения-
С вращающимися частями, имеющими полярные моменты инерции J M , J 1 , J 2 , …, J n и угловые скорости ω M , ω 1 , ω 2 , … ω n (рис. 1.12), их динамическое действие можно заменить действием одного полярного момента инерции, отнесенного, скажем, к валу двигателя, и мы можем напишите следующие уравнения-
Пример:
Двигатель приводит вращательную нагрузку через редуктор с передаточным числом зубьев а = 0,1 и КПД 90%. Нагрузка имеет момент инерции 10 кг·м 2 и крутящий момент 50 Н·м. Мотор имеет инерцию 0,4 кг-м 2 и работает с постоянной скоростью 1400 об/мин. Определите эквивалентную инерцию двигателя и комбинации нагрузки относительно стороны двигателя и мощности, развиваемой двигателем.
Главная ››
Характеристики двигателя постоянного тока | Характеристики крутящего момента и скорости – Wira Electrical
Характеристики двигателя постоянного тока очень важны для нас, электриков, из-за того, насколько обширны их области применения в различных целях.
Почти каждое механическое действие, которое мы наблюдаем в окружающей среде, приводится в действие электродвигателем. Электрические машины являются разновидностью преобразователя энергии. Электрическая энергия преобразуется в механическую с помощью двигателей.
Сотни предметов, которые мы используем каждый день, приводятся в действие электродвигателями. Моторы доступны в различных размерах. В промышленности обычно используются массивные двигатели, способные выдерживать нагрузку в 1000 лошадиных сил.
Лифты, электропоезда, подъемники и станы для прокатки тяжелых металлов — все это примеры интенсивного использования двигателей. Автомобильные двигатели, робототехника, ручные электроинструменты и блендеры для пищевых продуктов — все это примеры применения малых двигателей.
Микромашины — это электрические машины с деталями размером с эритроцит, имеющие широкий спектр медицинских применений.
Электродвигатели делятся на две категории: DC (постоянный ток) и AC (точный ток) (переменный ток). В этих категориях есть различные разновидности, каждая со своим собственным набором возможностей, которые хорошо подходят для конкретных приложений.
В этих категориях есть различные разновидности, каждая со своим собственным набором возможностей, которые хорошо подходят для конкретных приложений.
Электродвигатели, независимо от типа, состоят из статора (стационарное поле) и ротора (вращающееся поле или якорь), которые создают скорость вращения и крутящий момент за счет взаимодействия магнитного потока и электрического тока. Двигатели постоянного тока отличаются от двигателей других типов тем, что они могут работать на постоянном токе.
Существуют различные типы двигателей постоянного тока, однако все они работают по одному и тому же принципу. В этой главе мы рассмотрим их основные принципы работы и характеристики.
Крайне важно понимать свойства двигателя, чтобы мы могли выбрать тот, который лучше всего соответствует нашим потребностям.
Убедитесь, что вы также прочитали части двигателя постоянного тока, чтобы полностью понять, о каких частях мы говорим.
Электрическая схема двигателя постоянного токаЭтот тип двигателя постоянного тока имеет два свойства:
- Обмотки якоря и возбуждения электрически отделены друг от друга.
- Обмотки якоря и возбуждения питаются от отдельных источников постоянного тока.

Электрическая схема этого двигателя постоянного тока показана ниже:
Где:
В f = напряжение, подаваемое на обмотку возбуждения
I f = ток, протекающий в обмотке возбуждения
L f = индуктивность катушек обмотки возбуждения
R f = сопротивление катушек обмотки возбуждения
В T = напряжение, подаваемое на обмотку якоря
I a = ток, протекающий по обмотке якоря
L a = индуктивность витков обмотки якоря
R a = сопротивление витков обмотки якоря
E a = индуктивное напряжение в якоре
T m = крутящий момент двигателя
Теперь мы анализируем схему в установившемся режиме, поэтому d/dt для индуктивности равно нулю.
В установившемся режиме напряжение в статоре (поле):
(1.1)
В установившемся режиме напряжение в роторе (якоре):
(1. 2)
2)
В двигателе постоянного тока индуктивное напряжение E a также известно как противо-ЭДС, поскольку на него влияет Скорость двигателя (ꞷ R ),
(1,3)
, где
K 1 = константа якоря
ꞷ R = скорость мотора
Заместитель (1,3) до (1,2). Создает
(1.4)
Если значение R a достаточно малы, чтобы их можно было игнорировать, тогда
(1,5)
Крутящий момент, необходимый для вращения ротора, можно рассчитать по формуле:
(1,6)
Где:
T м = крутящий момент двигателя ( Н-м)
P out = выходная мощность двигателя (Вт)
Ꞷ r = скорость двигателя (рад/с)
Двигатель постоянного тока также может действовать как генератор постоянного тока, если якорь приводится в движение внешней энергией , производя электричество в процессе. Этого можно назвать первопроходцем.
Типы двигателей постоянного токаСуществует два типа двигателей постоянного тока:
- Двигатель постоянного тока с независимым возбуждением
- Двигатель постоянного тока с самовозбуждением
Двигатель постоянного тока с независимым возбуждением показан выше вместе с его уравнением. Как следует из названия, этот двигатель имеет два источника напряжения для раздельного питания якоря и обмотки возбуждения.
Как следует из названия, этот двигатель имеет два источника напряжения для раздельного питания якоря и обмотки возбуждения.
Мы узнаем об этом снова в следующем разделе.
Двигатель постоянного тока с самовозбуждением, наоборот, имеет только один источник напряжения для питания как обмотки якоря, так и обмотки возбуждения. Этот тип можно разделить на:
- Шунтирующий двигатель постоянного тока
- Серийный двигатель постоянного тока
- Составной двигатель постоянного тока
Характеристики этого двигателя:
- 6 обмотки должны питаться напряжением отдельно, поэтому нам нужны два источника постоянного напряжения, электрически разделенные друг от друга.
- Обмотки якоря и возбуждения электрически разделены.
Характеристики крутящего момента и скорости
Прежде чем переходить к кривой характеристики, необходимо выполнить пошаговый расчет.
Наведенное напряжение определяется по формуле:
(2.1)
Момент, создаваемый якорем, можно рассчитать по формуле:
(2.2)
Из уравнения (2.2) ток якоря равен:
( 2.3)
Замена I на в уравнении (2.1) дает
(2.4)
Таким образом, крутящий момент, создаваемый в якоре, может быть найден из
(2.5)
Из приведенного ниже уравнения мы можем построить характеристическую кривую ниже с зависимостью крутящего момента от скорости. Если мы будем постоянно поддерживать значения напряжения на клеммах (V T ) и потока (𝝓), то мы получим линейную линию сброса.
Из приведенной выше кривой характеристики крутящего момента мы можем перечислить некоторые важные примечания о двигателе постоянного тока с независимым возбуждением:
- Крутящий момент обратно пропорционален скорости вращения ротора.
- Максимальный крутящий момент при остановке, но ротор не вращается.
- Скорость холостого хода — это максимальная скорость ротора, когда к ротору не приложен крутящий момент.
Характеристики этого двигателя:
- Обмотки якоря и возбуждения соединены параллельно.
- Для питания обмотки якоря и обмотки возбуждения требуется только один источник напряжения.
Общий ток, потребляемый от источника питания, будет равен I T = I f + I a .
Общая потребляемая мощность составляет В T I T
Характеристики крутящего момента и скорости
Этот двигатель имеет относительно постоянный крутящий момент в широком диапазоне скоростей.
Характеристики крутящего момента и скорости вращения и уравнение для параллельного двигателя постоянного тока такие же, как и для двигателя постоянного тока с независимым возбуждением.
Помогите себе прокрутить немного вверх.
Характеристики двигателя постоянного тока (серия)Характеристики этого двигателя:
- Обмотки якоря и возбуждения соединены последовательно.
- Для питания обмотки якоря и обмотки возбуждения требуется только один источник напряжения.
Ток в обмотке возбуждения такой же, как и ток в обмотке якоря.
Двигатель серии имеет особенность, заключающуюся в том, что мы можем подавать на него переменное или постоянное напряжение. Даже если мы поменяем полярность питания, двигатель всегда будет вращаться в одном направлении.
Вот почему серийный двигатель называется универсальным. Конечно, здесь мы будем использовать постоянное напряжение.
Характеристики крутящего момента и скорости
Серийный двигатель постоянного тока можно анализировать с помощью того же подхода, что и параллельный двигатель.
Крутящий момент, создаваемый ротором, составляет
(3. 1)
1)
Где K f – постоянная (зависящая от числа витков обмотки возбуждения, геометрии магнитопровода, характеристик В-Н железа).
Таким образом, двигатель создает крутящий момент как имеют наведенное напряжение:
(3.4)
Подставив это уравнение в уравнение (3.3)
(3.5)
Созданный крутящий момент:
(3.6)
Из приведенных выше уравнений мы можем построить кривую характеристики крутящего момента для последовательного двигателя постоянного тока.
Судя по приведенной выше кривой, серийный двигатель постоянного тока способен перемещать тяжелый груз с низкой скоростью. Этот двигатель имеет высокий крутящий момент на низкой скорости и низкий крутящий момент на высокой скорости.
Характеристики двигателя постоянного тока (составного) Составные двигатели постоянного тока используют как последовательные, так и шунтирующие обмотки возбуждения. Как указано выше, одна обмотка возбуждения подключается последовательно к якорю, а другая обмотка возбуждения подключается параллельно якорю.