
Электрические машины переменного тока
Машины переменного тока подразделяются на синхронные и асинхронные. Асинхронные машины используются в основном, как двигатели. В режиме торможения они работают как генераторы. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели преимущественно применяются в качестве привода мощных производственных машин.
Асинхронная машина– такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотойf1, поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростьюn2отличающейся от скорости вращения магнитного поляn
Неподвижная часть машины – статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 120°одна относительно другой. Обмотки подключены к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены обмотки трех катушек. Если катушки статора соединить между собой в звезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле.
Ротор, представляет собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. При вращении магнитного поля токов статора со скоростьюn1, в проводниках ротора наводится ЭДС. Под действием ЭДС в короткозамкнутых витках ротора протекает ток, взаимодействующий с вращающимся магнитным полем. Это взаимодействие проявляется в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозной момент на его валу, то он получает ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратится, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью, отличной от скорости вращения поля.
Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора.
Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение:
где:
 – частота вращения ротора;
– частота вращения ротора;

 – число пар полюсов двигателя.
– число пар полюсов двигателя.
Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2 – 6%.
При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются.
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора — как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот.
Величины этих ЭДС определяются по формулам:
 ;
;
 ,
,
где:
 – ЭДС обмотки статора,
– ЭДС обмотки статора,
 – ЭДС обмотки неподвижного ротора,
– ЭДС обмотки неподвижного ротора,
 и
и – соответственно обмоточные коэффициенты
обмоток статора и ротора,
– соответственно обмоточные коэффициенты
обмоток статора и ротора,
 и
и – число обмоток статора и ротора,
– число обмоток статора и ротора,
 – основной магнитный поток,
– основной магнитный поток,
 – частота тока цепи обмоток статора,
– частота тока цепи обмоток статора,
 – частота ЭДС ротора. Из этого соотношения
следует, что частота ЭДС ротора
пропорциональна скольжению.
– частота ЭДС ротора. Из этого соотношения
следует, что частота ЭДС ротора
пропорциональна скольжению.
При неподвижном роторе  ,
т.е частота тока и ЭДС ротора равна
частоте ЭДС и тока статора и равна
частоте питающего напряжения. Векторная
диаграмма в этом режиме, называемым
холостым ходом, аналогична соответствующей
векторной диаграмме трансформатора.
,
т.е частота тока и ЭДС ротора равна
частоте ЭДС и тока статора и равна
частоте питающего напряжения. Векторная
диаграмма в этом режиме, называемым
холостым ходом, аналогична соответствующей
векторной диаграмме трансформатора.
ЭДС во вращающемся роторе 
Индуктивное сопротивление вращающегося ротора:

Активное сопротивление ротора  не зависит от частоты.
не зависит от частоты.
По закону Ома ток в роторе равен:
Электрическая мощность, подведенная к
двигателю из сети 
 и на нагрев обмотки статора
и на нагрев обмотки статора .
Остальная мощность электромагнитным
путем передается на ротор и называется
электромагнитной мощностью
.
Остальная мощность электромагнитным
путем передается на ротор и называется
электромагнитной мощностью .
Часть мощности, переданной на ротор,
тратится на нагрев меди обмоток ротора
.
Часть мощности, переданной на ротор,
тратится на нагрев меди обмоток ротора
 .
Остальная часть мощности называется
полной механической мощностью
.
Остальная часть мощности называется
полной механической мощностью  .
Если из полной механической мощности
вычесть механические потери
.
Если из полной механической мощности
вычесть механические потери  и
добавочные потери
и
добавочные потери  то получится полезная мощность на валу
двигателя
то получится полезная мощность на валу
двигателя .
.КПД асинхронного двигателя:
 ,
,
где  .
.
Величина КПД асинхронных двигателей составляет от 0,7 до 0,9 и выше.
Механическая мощность ротора:
 ,
,
где  – вращающий момент двигателя.
– вращающий момент двигателя.
Электромагнитная мощность вращающегося магнитного поля:
Основные режимы работы асинхронного двигателя:
пуск двигателя в ход,
холостой ход двигателя,
рабочий режим двигателя.
Рабочий режим двигателя при номинальной
нагрузке характеризуется номинальными
параметрами различными для каждого
асинхронного двигателя. Основным
номинальным параметром асинхронного
двигателя является его номинальная
мощность  .
Это мощность выражается в киловаттах
и соответствует той наибольшей
механической мощности на валу двигателя,
которая может быть полезно отдана
механизму, приводимого двигателем во
вращение. Работа двигателя с нагрузкой
превышающей его номинальную мощность,
рассматривается как перегрузка и потому
длительно не допустима.
.
Это мощность выражается в киловаттах
и соответствует той наибольшей
механической мощности на валу двигателя,
которая может быть полезно отдана
механизму, приводимого двигателем во
вращение. Работа двигателя с нагрузкой
превышающей его номинальную мощность,
рассматривается как перегрузка и потому
длительно не допустима.
Вторым параметром двигателя является
его номинальная скорость вращения  .
.
Важным электрическим параметром является
напряжение, для которого предназначен
двигатель  .
Номинальный ток двигателя устанавливается,
исходя из номинальной мощности двигателя
и номинального напряжения. К номинальным
параметрам относят также номинальный
коэффициент мощности двигателя.
.
Номинальный ток двигателя устанавливается,
исходя из номинальной мощности двигателя
и номинального напряжения. К номинальным
параметрам относят также номинальный
коэффициент мощности двигателя.
Номинальный момент  часто вычисляют по упрощенной формуле,
учитывая номинальные значения величин:
часто вычисляют по упрощенной формуле,
учитывая номинальные значения величин:
 (кГм.) или(Н·м.)
(кГм.) или(Н·м.)
Для расчета зависимости вращающего момента асинхронного двигателя от скольжения с достаточной точностью применяется упрощенная формула:
 ,
,
где:  – максимальный вращающий момент,
– максимальный вращающий момент,
 – критическое скольжение, при котором
вращающий момент достигает своего
максимального значения, его величина
зависит от активного сопротивления
цепи ротора. При известном номинальном
скольжении критическое определяется
по формуле:
– критическое скольжение, при котором
вращающий момент достигает своего
максимального значения, его величина
зависит от активного сопротивления
цепи ротора. При известном номинальном
скольжении критическое определяется
по формуле:
Зависимость вращающего момента от его
скольжения или, от скорости вращения
ротора называют механической
характеристикой двигателя.  ,
при
,
при ,
, .
.
Для оценки рабочих свойств двигателя
пользуются его рабочими характеристиками.
Рабочими характеристиками асинхронного
двигателя называют кривые, характеризующие
зависимость электромагнитного момента  ,
тока статора
,
тока статора ,
КПД
,
КПД ,
и коэффициента мощности на валу
,
и коэффициента мощности на валу от полезной мощности
от полезной мощности на валу при неизменном напряжении и
частоте питающего напряжения
на валу при неизменном напряжении и
частоте питающего напряжения ,
, .
.
В зависимости от конструктивного выполнения роторной обмотки трехфазные асинхронные двигатели разделяются на два типа:
При пуске двигателя с короткозамкнутым
ротором скорость вращения ротора в
первый момент  ,
чему соответствует максимальное
скольжение
,
чему соответствует максимальное
скольжение ,
двигатель находится в режиме короткого
замыкания. Ток в роторе имеет наибольшее
значение и наибольший сдвиг фаз по
отношению к ЭДС. При этом пусковой ток
статора в 4 – 10 раз больше номинального.
Пусковой момент составляет 0,9 – 1,8 от
номинального момента. По мере разгона
двигателя величина пускового тока
быстро уменьшается. Большая величина
пускового тока вызывает резкие колебания
напряжения в сети, что плохо отражается
на работе других потребителей. При
включении двигателей в мощные энергосистемы
эти колебания нивелируются, поэтому
используется прямой пуск — включением
обмотки статора на полное напряжение
цепи. Для уменьшения пускового тока
асинхронных двигателей с короткозамкнутым
ротором применяют способы, позволяющие
понизить на время пуска напряжение,
подводимое к статору: переключение
обмотки статора со звезды на треугольник,
запуск двигателя через автотрансформатор,
включение дополнительного сопротивления
в обмотку статора. При запуске двигателя
через автотрансформатор уменьшение
пускового тока в цепи произойдет враз, где
,
двигатель находится в режиме короткого
замыкания. Ток в роторе имеет наибольшее
значение и наибольший сдвиг фаз по
отношению к ЭДС. При этом пусковой ток
статора в 4 – 10 раз больше номинального.
Пусковой момент составляет 0,9 – 1,8 от
номинального момента. По мере разгона
двигателя величина пускового тока
быстро уменьшается. Большая величина
пускового тока вызывает резкие колебания
напряжения в сети, что плохо отражается
на работе других потребителей. При
включении двигателей в мощные энергосистемы
эти колебания нивелируются, поэтому
используется прямой пуск — включением
обмотки статора на полное напряжение
цепи. Для уменьшения пускового тока
асинхронных двигателей с короткозамкнутым
ротором применяют способы, позволяющие
понизить на время пуска напряжение,
подводимое к статору: переключение
обмотки статора со звезды на треугольник,
запуск двигателя через автотрансформатор,
включение дополнительного сопротивления
в обмотку статора. При запуске двигателя
через автотрансформатор уменьшение
пускового тока в цепи произойдет враз, где —
коэффициент трансформации автотрансформатора.
Однако недостатком этих способов
является уменьшение пускового момента,
величина которого пропорциональна
квадрату напряжения сети:
—
коэффициент трансформации автотрансформатора.
Однако недостатком этих способов
является уменьшение пускового момента,
величина которого пропорциональна
квадрату напряжения сети: .
.
Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора.
Пусковые качества двигателей
характеризуются коэффициентами кратности
пускового тока  и пускового момента
и пускового момента .
.
Частота вращения двигателя регулируется изменением частоты вращения магнитного поля (частоты питающего напряжения), переключением пар полюсов, изменением активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой.
В синхронном двигателе частота
вращения двигателя равна частоте
вращения магнитного поля: .
.
Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением:
где:
 – угол между векторами ЭДС и напряжения,
т.е.
– угол между векторами ЭДС и напряжения,
т.е. ,
,
 – полное индуктивное сопротивление
двигателя.
– полное индуктивное сопротивление
двигателя.
На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума нагрузки и двигателем – в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми.
Синхронная машина состоит из двух частей: неподвижной части – статора и вращающейся части – ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения – на роторе.
Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения машины к сети переменного тока. При этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать.
Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается.
Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине.
Пример.Определить мощность, подводимую к
трехфазному асинхронному двигателю с
фазным ротором, а также ток в обмотках
статора при их соединении звездой и
треугольником. Номинальные параметры
двигателя: полезная мощность на валу кВт, напряжение на статоре
кВт, напряжение на статоре В,
В, %,
%, 0,85.
0,85.
Решение.Активная мощность, потребляемая двигателем, равна:
 кВт.
кВт.
полная мощность:
 кВ·А.
кВ·А.
При соединении обмоток звездой:
 А,
А,
при соединении треугольником:
 А.
А.
Пример.Для привода лифта использован трехфазный
асинхронный электродвигатель с
короткозамкнутым ротором, питающийся
от трехфазной сети с частотой напряжения Гц (рис.6.15), с числом пар полюсов
Гц (рис.6.15), с числом пар полюсов и частотой вращения ротора
и частотой вращения ротора .
Определить частоту вращения
.
Определить частоту вращения и
и вращающегося магнитного поля, скольжение
вращающегося магнитного поля, скольжение ротора, частоту
ротора, частоту тока в роторе при пуске и в рабочем
режиме
тока в роторе при пуске и в рабочем
режиме ,
а также частоту вращения ротора
,
а также частоту вращения ротора ,
частоту тока
,
частоту тока в роторе при возрастании нагрузки на
валу двигателя, с учетом того, что частота
вращения ротора
в роторе при возрастании нагрузки на
валу двигателя, с учетом того, что частота
вращения ротора при этом уменьшилась на 5% и составляет
при этом уменьшилась на 5% и составляет .
.
Рис.6.15. Трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети.
Решение.Частота вращения магнитного
поля (синхронная частота вращения) при
числе пар полюсов :
:
 об/мин.
об/мин.
Угловая частота вращения магнитного поля:
 рад/с.
рад/с.
Скольжение ротора двигателя:
 .
.
Частота вращения ротора двигателя:
 об/мин,
об/мин,  .
.
Частота тока в роторе двигателя при
пуске  :
:
 Гц.
Гц.
Частота тока ротора при частоте вращения двигателя:
 Гц.
Гц.
Частота вращения ротора при возросшей нагрузке на валу двигателя:
 об/мин.
об/мин.
Скольжение ротора при возросшей нагрузке:
 .
.
Частота тока ротора при возросшей нагрузке:
 Гц.
Гц.
Пример.Для пуска восьмиполюсного асинхронного
двигателя с фазным ротором и номинальными
параметрами: об/мин;
об/мин; и
и Ом
используется пусковой реостат. Определить
сопротивление
Ом
используется пусковой реостат. Определить
сопротивление фазы пускового реостата, чтобы при пуске
двигатель развивал максимальный момент,
если частота напряжения сети
фазы пускового реостата, чтобы при пуске
двигатель развивал максимальный момент,
если частота напряжения сети Гц.
Гц.
Решение.Номинальное скольжение определяется по формулам:
 ,
, ,
,
согласно которым
 об/мин
об/мин
и  .
.
Критическое скольжение равно:
 .
.
Пусковое сопротивление определяется из соотношения:
 ,
,
отсюда:
 Ом.
Ом.
Пример.Асинхронный двигатель с короткозамкнутым
ротором имеет следующие паспортные
данные: В,
В, кВт,
кВт, об/мин,
об/мин, %,
%, .
Кратность пускового тока
.
Кратность пускового тока ,
частота напряжения питания
,
частота напряжения питания Гц.
Определить число пар полюсов, номинальный
и пусковой токи двигателя при соединении
обмоток статора в треугольник и звезду.
Гц.
Определить число пар полюсов, номинальный
и пусковой токи двигателя при соединении
обмоток статора в треугольник и звезду.
Решение.Ближайшая стандартная
синхронная частота об/мин,
следовательно, число пар полюсов
об/мин,
следовательно, число пар полюсов ,
т.е. машина шестиполюсная.
,
т.е. машина шестиполюсная.
Скольжение равно:
 ,
,
мощность, потребления двигателя:
 кВт,
кВт,
номинальный момент:
 Н·м.
Н·м.
При соединении обмоток треугольником номинальный ток:
 А,
А,
пусковой ток:
 А.
А.
При соединении обмоток звездой:
 А,
А,
пусковой ток:
 А,
А,
т.е. пусковой ток в этом случае в  раз меньше.
раз меньше.
Пример.Синхронный шестиполюсный двигатель
имеет следующие номинальные данные: кВт,
кВт, об/мин,
об/мин, В,
В, А,
А, Ом.
Определить номинальный и максимальный
моменты двигателя, если ЭДС двигателя
равна 670 В. Построить угловую
характеристику двигателя.
Ом.
Определить номинальный и максимальный
моменты двигателя, если ЭДС двигателя
равна 670 В. Построить угловую
характеристику двигателя.
Решение.Номинальный момент определяется по формуле:
 .
.
Максимальный момент при  равен:
равен:
 .
.
Подставляя исходные данные, получаем:
 .
.
Исходная зависимость для угловой
характеристики имеет вид  .
Например, при номинальном моменте
.
Например, при номинальном моменте и
и .
.
Электрические машины переменного тока
Электрические машины переменного тока. Назначение, область применение, устройство принцип действие машин.
Машины переменного тока бывают двух видов. Это синхронные машины и асинхронные. У синхронных машин скорость вращения ротора строго зависит от частоты переменного тока. Можно сказать скорость вращения «синхронна» с частотой тока. Не трудно догадаться, что у асинхронных машин частота вращения в общем случае зависит от нагрузки на валу, а не от частоты питающего тока. Кроме деления на синхронные и асинхронные электрические машины еще делятся по назначению. Это могут быть генераторы. То есть такая машина, которая преобразует механическую энергию вращения в переменный электрический ток. Машина, которая преобразует электрическую энергию в механическую называется двигателем. Также существует еще один класс электрических машин. Они преобразуют электрическую энергию, тоже в электрическую, но другой частоты или напряжения. Синхронной машиной переменного тока называют такую машину, в которой: основное магнитное поле то есть поле статора создается постоянным током. В частном случае это может быть даже постоянный магнит. А вращение ротора происходит с частотой изменения тока.
Формула 1 — зависимость частоты вращения ротора синхронной машины от частоты переменного тока. где n это частота, с которой вращается ротор, измеряется в оборотах в минуту. То есть, сколько полных оборотов совершит ротор за одну минуту. f частота питающего переменного тока p количество пар полюсов у магнитной системы машины
В настоящее время асинхронные машины используются в основном в режиме двигателя. Машины мощностью больше 0.5 кВт обычно выполняются трёхфазными, а при меньшей мощности – однофазными.
Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5 кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания. Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
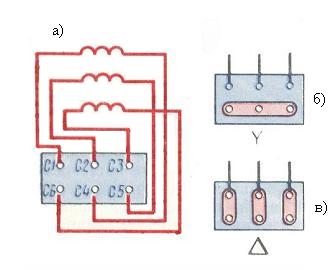
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами c1,c2,c3, концы – c4,c5,c6.
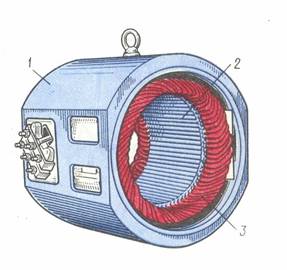
Начала и концы фаз выведены на клеммник, закреплённый на станине. Обмотка статора может быть соединена по схеме звезда или треугольник. Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл=660В по схеме звезда или в сеть с Uл=380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
Сердечник ротора набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов:короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).
Короткозамкнутая обмотка ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
Однафазные асинхронные двигатели.
Асинхронный двигатель является простейшей из электрических машин. Как и любая электрическая машина, он имеет две основные части: статор и ротор.
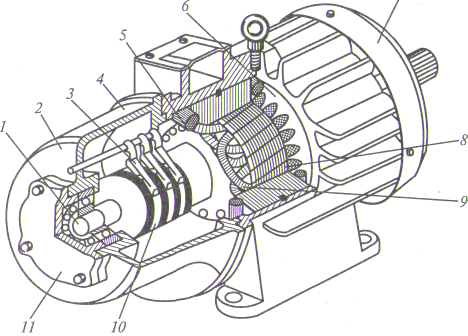
Статор (рис. 6.1) состоит из чугунной станины 1, в которой закреплен магнитопровод 2 в виде полого цилиндра. Между станиной и сердечником обычно оставляют зазор, через который проходит охлаждающий воздух. Для уменьшения потерь на вихревые токи магнитопровод набирают из тонких (0,5 мм) листов электротехнической стали, изолированных друг от друга лаком.
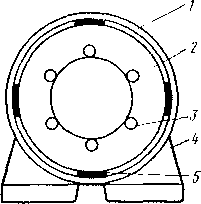
Рис. 6.1. Конструкция статора асинхронного двигателя:
1 — станина; 2 — сердечник; 3 — обмотка;
4 — лапа; 5 — прокладка
В пазы, вырезанные по внутренней окружности статора, укладывают обмотку 3. У двухполюсной машины обмотка статора состоит из трех катушек, сдвинутых на углы 120°, у четырехполюсной — из шести катушек, сдвинутых на 60°, у шестиполюсной — из девяти катушек и т. д. Обмотку в пазах статора закрепляют клиньями.
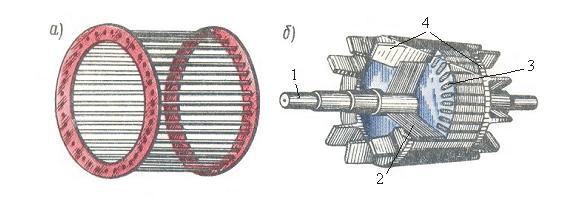
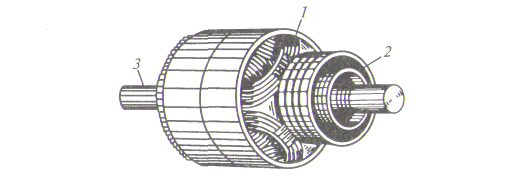
Ротор также набирают из тонких листов электротехнической стали. В пазах ротора размещают обмотку, которая может быть короткозамкнутой или фазной (рис. 6.2). Короткозамкнутая обмотка типа
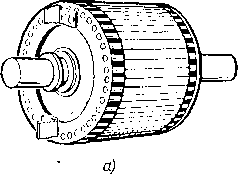
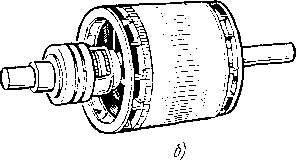
Рис. 6.2. Общий вид ротора асинхронного двигателя с коротко- замкнутой (а) и фазной (б) обмотками
«беличья клетка» изображена на рис. 6.3. Она состоит из толстых проводящих стержней (медь, алюминий), соединенных по торцам медными или алюминиевыми кольцами. Короткозамкнутая обмотка не изолируется от ротора. Иногда ее изготовляют заливкой расплавленного алюминия в пазы ротора.
Контактные кольца1, изготовленные из латуни или меди, укрепляют на валу двигателя с помощью изолирующих прокладок. Щеткодержатель с угольными или медно-графитовыми щетками 2 крепят на подшипниковом щите.
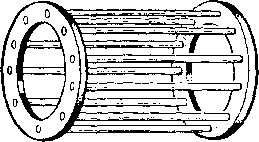
Рис. 6.3. Общий вид коротко- замкнутой обмотки типа «беличья клетка»
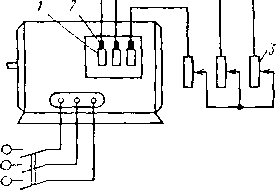
Рис. 6.4. Схема соединения фазной обмотки ротора с регулировочными реостатами:
1 —’контактные кольца, 2— щетки; 3 — реостаты
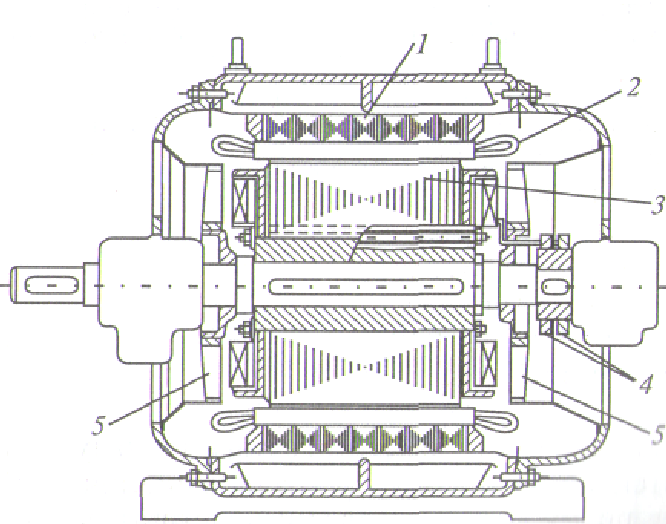
Общий вид асинхронного двигателя показан на рис. 6.5.
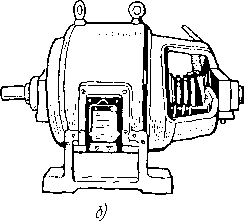
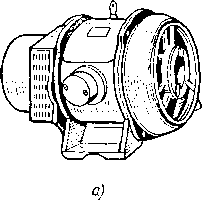
Рис. 6.5. Общий вид асинхронного двигателя с короткозамкнутой (а) и фазной (б) обмотками ротора
Принцип действия асинхронного двигателя.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля и основных законов электротехники.
При включении двигателя в сеть трехфазного тока в статоре образуется вращающееся магнитное поле, силовые линии которого пересекают стержни или катушки обмотки роторо. При этом, согласно закону электромагнитной индукции, в обмотке ротора индукциреутся ЭДС, пропорциональная частоте пересечения силовых линий. Под действием индуцированной ЭДС в короткозамкнутом роторе возникают значительные токи.
В соответствии с законом Ампера на проводники с током, находящиеся в магнитном поле, действуют механические силы, которые по принципу Ленца стремятся устранить причину, вызывающую индуцированный ток, т. е. пересечение стержней обмотки ротора силовыми линиями вращающегося поля. Таким образом, возникшие механические силы будут раскручивать ротор в направлении вращения поля, уменьшая скорость пересечения стержней обмотки ротора магнитными силовыми линиями.
Достичь частоты вращения поля в реальных условиях ротор не может, так как тогда стержни его обмотки оказались бы неподвижными относительно магнитных силовых линий и индуцированные токи в обмотке ротора исчезли бы. Поэтому ротор вращается с частотой, меньшей частоты вращения поля, т. е. несинхронно с полем, или асинхронно.
Если силы, тормозящие вращение ротора, невелики, то ротор достигает частоты, близкой к частоте вращения поля. При увеличении механической нагрузки на валу двигателя частота вращения ротора уменьшается, токи в обмотке ротора увеличиваются, что приводит к увеличению вращающего момента двигателя. При некоторой частоте вращения ротора устанавливается равновесие между тормозным и вращающим моментами.
Синхронный двигатель
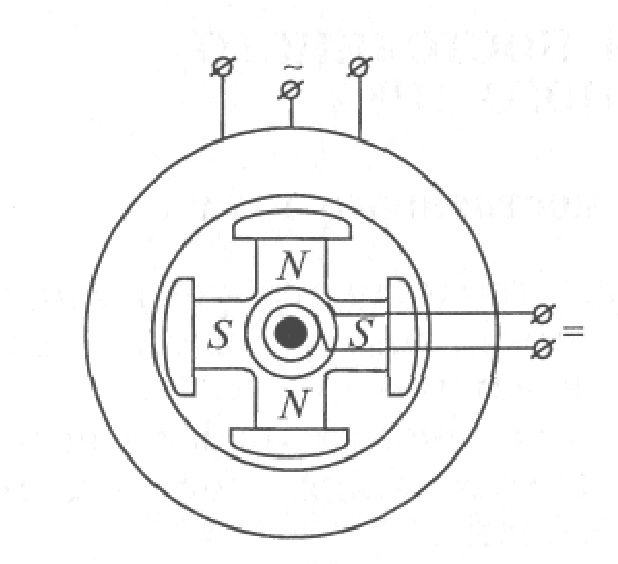
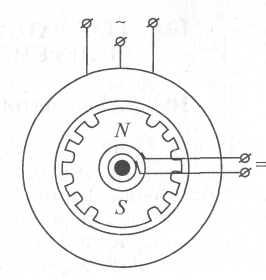
Устройство статора синхронного двигателя аналогично устройству статора асинхронного двигателя. Ротор синхронного двигателя представляет собой электромагнит или постоянный магнит (рис. 6.6).
Принцип работы синхронного двигателя поясняется рис. 6.7. Внутри магнита N1 S1 помещен магнит NS. Если магнит N1 S1 вращать, то он потянет за собой магнит NS. В стационарном режиме частоты вращения обоих магнитов одинаковы.
К валу магнита NS можно приложить механическую нагрузку. Чем больше эта нагрузка, тем больше угол отставания оси магнита NS от оси магнита NiSi. При некоторой нагрузке силы притяжения между магнитами будут преодолены и ротор остановится.
В реальном двигателе поле магнита N1 S1 заменено вращающимся магнитным полем статора; при этом ротор либо вращается синхронно с магнитным полем статора, отставая на угол , либо останавливается (выпадает из синхронизма) при перегрузке. Таким образом, независимо от нагрузки ротор всегда вращается с постоянной частотой, равной частоте вращения магнитного поля статора:
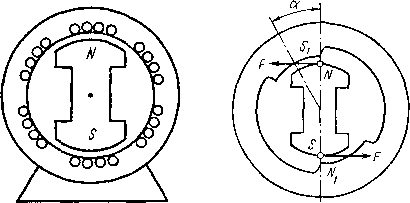
Рис. 6.6. Схематическое изображение Рис. 6.7. К пояснению принципа синхронного двигателя работы синхронного двигателя
Постоянство частоты вращения — важное достоинство синхронного двигателя. Строгое постоянство частоты вращения требуется во многих областях техники, например при записи и воспроизведении звука. Недостаток синхронного двигателя — трудность пуска: для пуска нужно раскрутить ротор в сторону вращения поля статора. Для этого чаще всего применяют специальную короткозамкнутую обмотку, вделанную в ротор. В момент пуска двигатель работает как асинхронный. Когда частота вращения ротора приближается к частоте вращения поля статора, ротор входит в синхронизм и двигатель работает как синхронный. Короткозамкнутая обмотка при этом оказывается обесточенной, так как частота вращения ротора равна частоте вращения поля статора и стержни обмотки ротора не пересекаются магнитными силовыми линиями.
В настоящее время существует тенденция замены на подвижных объектах (корабли, самолеты, автомобили) электрических цепей постоянного тока цепями переменного тока повышенной частоты (200, 400 Гц и выше). Возможность использования бесколлекторных машин переменного тока, трансформаторов и магнитных усилителей позволяет повысить надежность работы цепи, а также уменьшить габариты и массу машин и аппаратов.
При оборудовании объекта сетью переменного тока широкое применение находит электропривод на переменном токе. Разработаны схемы с асинхронными и синхронными двигателями, которые позволяют выполнить все операции, осуществляемые ранее двигателями постоянного тока.
Преимущества асинхронных двигателей особенно заметны тогда, когда по условиям работы привода нет необходимости в плавном регулировании частоты вращения в широких пределах и больших пусковых моментах (привод насосов, вентиляторов и др.).
Синхронные двигатели особенно удобны для привода роторов гироскопов. В тех случаях, когда гироскоп используют для особо точных измерений (например, в баллистических ракетах), приводом ротора гироскопа служит синхронный двигатель. При этом частота вращения ротора зависит только от конструкции двигателя и частоты питающего тока, которую можно стабилизировать с очень высокой степенью точности.
Синхронный генератор
Ротор синхронных машин вращается синхронно с вращающимся магнитным полем (отсюда их название). Поскольку частоты вращения ротора и магнитного поля одинаковы, в обмотке ротора не индуцируются токи. Поэтому обмотка ротора получает питание от источника постоянного тока.
Устройство статора синхронной машины (рис. 6.8) практически не отличается от устройства статора асинхронной машины.
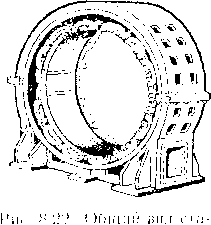
Рис 6.8. Общий вид статора синхронного генератора.
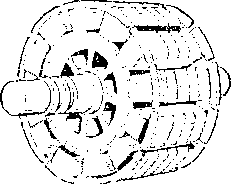
Рис 6.9. Общий вид неявнополюсного ротора синхронного генератора.
Роторы синхронных генераторов могут быть явнополюсными (рис. 6.9) и неявнополюсными (рис. 6.10). В первом случае синхронные генераторы приводятся в действие тихоходными турбинами гидроэлектростанций, во втором — паровыми или газовыми турбинами теплоэлектростанций.

Рис. 6.10. Общий вид неявнополюсного ротора синхронного генератора
Используют различные способы возбуждения синхронных генераторов. Широкое распространение получил синхронный генератор с машинным возбудителем, представляющим собой генератор постоянного тока, расположенный на одном валу с синхронным генератором. Машинный возбудитель приводится в действие от того же первичного двигателя, что и синхронный генератор. Выходные зажимы возбудителя через щетки и кольца подсоединены к обмотке ротора синхронного генератора. Напряжение синхронного генератора можно регулировать реостатом в цепи обмотки возбуждения возбудителя, что удобно и энергетически выгодно, так как в этой обмотке протекают сравнительно небольшие токи.
Находят также применение генераторы с самовозбуждением через полупроводниковые или механические выпрямители.
Из характеристик синхронного генератора наибольший практический интерес представляют внешние характеристики, выражающие зависимость напряжения на зажимах генератора от тока нагрузки при неизменных значениях тока возбуждения, частоты и коэффициента мощности.
Классификация электрических машин
Электрические машины, как и другие устройства, также можно классифицировать. Классифицируют электрические машины по назначению, принципу действия и роду тока, мощности, по частоте вращения.
Классификация по назначению
Электрические машины по своему назначению подразделяют на:
- Электромашинные генераторы. Они выполняют преобразовании энергии механической (вращение) в электрическую. Они устанавливаются на электрических станциях, автомобилях, самолетах, тепловозах, передвижных электростанциях, кораблях и в других установках. На электростанциях генератор приводят в движение мощные паровые турбины, на автомобилях, тепловозах и прочих транспортных средствах – газовые турбины или двигатели внутреннего сгорания. Генераторы очень часто используют в качестве источников питания в различных установках связи, автоматики и измерительной техники и в других системах.

- Электрические двигатели – выполняют функции обратные генератору, а именно, преобразуют электрическую энергию в механическую. Они используются для приведения в движение множества установок в промышленности, сельском хозяйстве, транспорте, в быту, в системах связи. В системах автоматического регулирования их активно используют в качестве регулирующих, программирующих и исполнительных органов.
- Электромашинные преобразователи – выполняют преобразования электрических величин. Например, могут преобразовывать постоянный ток в переменный и наоборот, изменять частоту, число фаз и другие функции. В связи с активным внедрением полупроводниковых преобразователей электромашинные преобразователи в новых проектах используют крайне редко (практически никогда), а уже установленные электромашинные преобразователи активно модернизируются полупроводниковыми (тиристорными и транзисторными).
- Электромашинные компенсаторы – осуществляют регулирование коэффициента мощности cos φ, а именно баланса реактивной мощности в сети.
- Электромашинные усилители – используют для объектов большой мощности. Это, своего рода усилители, они усиливают сигналы большой мощности, при этом управление ведется сигналами малой мощности. Роль этих усилителей, как и электромашинных компенсаторов, в современном мире практически сведена на нет из – за применения полупроводниковых усилителей (транзисторных и тиристорных).
- Электромеханические преобразователи сигналов – это, как правило, электрические микромашины (например, сельсины), которые довольно широко используют в системах автоматического управления.
Классификация по роду тока и принципу действия
Как известно, существует два рода электрического тока – переменный и постоянный. Исходя из этого, электрические машины также подразделяют по роду тока на два вида –машины электрические переменного тока и машины электрические постоянного тока.
Электрические машины переменного тока
В свою очередь электрические машины переменного тока делят на:
- Трансформаторы – наиболее широко применимы в сетях электроснабжения для преобразования напряжений (повышение и понижение). Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).

- Асинхронные электродвигатели – самые распространенные в мире благодаря своей относительной простоте и низкой стоимости. Простота конструкции и высокая надежность позволяет применять их не только в промышленных электроустановках (станки, краны, подъемные машины), но и в бытовых (компрессора холодильников, вентиляторы, пылесосы). Довольно широкое применение получили однофазные и двухфазные асинхронные управляемые электродвигатели, а также сельсины и тахогенераторы асинхронные.

- Синхронные электродвигатели – наиболее часто применяемы в качестве генераторов электрического тока на электрических станциях. Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах). Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ. Относительно электроприводов малой мощности, то там довольно широкое распространение получили реактивные синхронные электродвигатели, шаговые, индукторные, с постоянными магнитами и другие.
- Коллекторные машины – используют их относительно редко и зачастую только в качестве электродвигателей. Это вызвано сложностью их конструкции, а также в необходимости довольно тщательного ухода за ними. В бытовых электроприборах и устройствах автоматики применяются универсальные коллекторные электродвигатели, способные работать на двух родах тока – постоянном и переменном.
Электрические машины постоянного тока
В недалеком прошлом были они самыми популярными в регулируемом электроприводе из-за простоты управления ими. Они работают практически во всех сферах промышленности и транспорта. Из-за повышенной стоимости и требовательности в обслуживании активно вытесняются частотно-регулируемыми электроприводами переменного тока.
В связи с большим распространением машин постоянного тока также были распространены и генераторы постоянного тока. Они использовались в качестве источников постоянного напряжения для зарядки аккумуляторных батарей, на транспорте (тепловозы, теплоходы и другие), а также в промышленности (система генератор — двигатель). Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.
Также применяются электродвигатели постоянного тока и в системах автоматического управления АСУ в качестве усилителей электромашинных, тахогенераторов и исполнительных электродвигателей.
Электрические микромашины
Микромашины активно применяются в устройствах автоматических. Соответственно их подразделяют на группы:
- Силовые микродвигатели – приводят во вращения механизмы различных автоматических устройств. Например, самопишущие устройства и другие.

- Исполнительные (управляемые) микромашины – выполняют преобразование энергии электрической в механическую, то есть ведут обработку определенных команд из вне.
- Тахогенераторы – преобразуют механическую энергию вращения вала в электрический сигнал напряжения, который пропорционален скорости вращения вала.
- Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается напряжение, пропорциональное функции углу поворота ротора, например синусу или косинусу данного угла или же самому углу.
- Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и синхронный поворот или же вращения нескольких осей, не имеющих между собой механической связи.
- Микромашины гироскопических приборов – вращают роторы гироскопов с довольно высокой частотой, а также производят коррекцию их положения.
- Электромашинные усилители и преобразователи.
Машины первых двух групп довольно часто называют силовыми, а электродвигатели третьей – пятой групп информационными.
Классификация по мощности
Также электрические машины классифицируют еще и по мощности. И по мощности их делят на:
- Микромашины – их мощность может варьироваться от нескольких долей ватта до 500 Вт. Они могут производится для двух родов тока — постоянного и переменного. Могут быть рассчитаны как на работу при нормальной (промышленной) частоте 50 Гц, так и при повышенной ( от 400 до 2000 Гц).
- Электродвигатели малой мощности – от 0,5 до 10 кВт. Также могут изготавливаться для двух родов тока – постоянного и переменного нормальной и повышенной частоты.
- Электродвигатели средней мощности – от 10 кВт до нескольких сотен ватт.
- Электродвигатели большой мощности – мощность данных машин больше нескольких сотен киловатт. Такие электродвигатели предназначены для работы на постоянном и переменном напряжении нормальной частоты. Исключение могут составлять электродвигатели специального назначения (авиация, флот) и другие.

Классификация по частоте вращения
Условно их разделяют на:
- До 300 об/мин — тихоходные.
- От 300 до 1500 об/мин — средней быстроходности.
- От 1500 до 6000 об/мин — быстроходные.
- Более 6000 об/мин — сверхбыстроходные.
Микромашины же могут изготавливать с частотой вращения вала от нескольких оборотов в минуту до 60 000 оборотов в минуту. Скорость вращения машин средней и большой мощности, как правило, не превышает 3000 об/мин.
Электрическая машина — Википедия
Электрическая машина — электромеханический преобразователь физической энергии[1], основанный на явлениях электромагнитной индукции и силы Ампера, действующей на проводник с током, движущийся в магнитном поле.
Возможность создания электрической машины как электромеханического преобразователя базируется на электромагнитном взаимодействии, которое осуществляется посредством электрического тока и магнитного поля. Электрическая машина, в которой электромагнитное взаимодействие осуществляется при помощи магнитного поля называется индуктивной, а в которой при помощи электрического — ёмкостной. Ёмкостные машины практически не используются, так как при конечной проводимости воздушной среды (при наличии влаги) заряды будут исчезать из активной зоны электрической машины в землю.
По направлению преобразования энергии электрические машины разделяют на:
- генераторы, если основным является преобразование кинетической энергии в электрическую с побочным выделением тепла;
- двигатели, если основным является преобразование электрической энергии в кинетическую с побочным выделением тепла;
- трансформаторы (а также умформеры и фазорасщепители), если основным является преобразование электрической энергии с одними параметрами в электрическую с другими с побочным выделением тепла;
- электромеханические преобразователи энергии, если преобразование электрической энергии целенаправленно производится в тепловую и механическую.
Для большинства машин выполняется принцип обратимости, когда одна и та же машина может выступать как в роли двигателя, так и в роли генератора или электромагнитного тормоза.
В большинстве электрических машин выделяют ротор — вращающуюся часть, и статор — неподвижную часть, а также воздушный зазор, их разделяющий.
По принципу действия выделяют такие типы машин:
- Асинхронная машина — электрическая машина переменного тока, в которой частота вращения ротора отличается от частоты вращения магнитного поля в воздушном зазоре на частоту скольжения.
- Синхронная машина — электрическая машина переменного тока, в которой частоты вращение ротора и магнитного поля в зазоре равны.
- Машина двойного питания — электрическая машина переменного тока, в которой ротор и статор в общем случае имеют разные частоты питающего тока. В результате ротор вращается с частотой, равной сумме (разности) питающих частот.
- Машина постоянного тока — электрическая машина, питаемая постоянным током и имеющая коллектор.
- Универсальный коллекторный двигатель — электрическая машина, питаемая постоянным или переменным током и имеющая коллектор.
- Вентильный двигатель — электрическая машина постоянного тока, в которой механический коллектор заменён полупроводниковым коммутатором (ПК), возбуждение осуществляется от постоянных магнитов, размещенных на роторе; а статорная обмотка, как в синхронной машине. ПК по сигналам логического устройства поочерёдно, в определённой последовательности, попарно подключает фазы электродвигателя к источнику постоянного тока, создавая вращающееся поле статора, которое, взаимодействуя с полем постоянного магнита ротора, создаёт вращающий момент электродвигателя.
- Умформер на базе электрической машины (см. также Инвертор) — как правило, пара электрических машин, соединённых валами, выполняющих преобразование рода тока (постоянный в переменный или наоборот), частоты тока, числа фаз, напряжений.
- Сельсин — электрическая машина для дистанционной передачи информации об угле поворота.
- Трансформатор — электрический аппарат[2] переменного тока (электрический преобразователь), преобразующий электрический ток напряжения одного номинала в электрический ток напряжения другого номинала. Существуют статические и поворотные трансформаторы .
Основное:
- Преобразование энергии — основное назначение электрических машин в качестве двигателей или генераторов.
- Преобразование величины напряжения — основное назначение трансформаторов.
Не основное:
Следует отметить что электрической машиной в большинстве случаев является электрический двигатель.
Уточненный расчет рабочих характеристики и использование существующих программ оптимизации позволяют уже на стадии проектирования машины получить весьма совершенную конструкцию. Наиболее распространены следующие методы математического моделирования электрических машин:
— аналитические;
— расчет схем замещения, сформированных с использованием магнитных проводимостей отдельных участков магнитной цепи;
— расчет полей на основе метода конечных элементов.
Аналитические методы основаны на решении уравнений, в которые входят такие величины, как магнитные потоки, напряжения и токи. При исследовании асинхронных машин широкое распространение получил расчет схемы замещения одной фазы. Этот подход обычно применяется при расчете установившихся режимов и реже для расчета переходных процессов. При использовании аналитических методов принимаются допущения:
— плотность тока в проводниках распределена равномерно по их сечению;
— распределение индукции в воздушном зазоре синусоидально;
— нагрев машин не влияет на значения параметров схемы замещения;
— нелинейность магнитных цепей (работа в настоящее время сосредоточена на моделях, которые учитывают эффект насыщения в определении параметров эквивалентной схемы).
Погрешность аналитических расчетов может достигать 15-20% и выше.
Численные методы стали широко применяться в последнее время в связи с быстрым развитием вычислительных машин и компьютерных технологий. Современные компьютерные программы позволяют решать не только двухмерные, но и трехмерные задачи. Обычно численные методы предполагают использование различных по форме расчетных сеток, представляющих область задачи, причем точность модели тем выше, чем больше число узлов сетки. Применяются модели, основанные на методе конечных разностей (МКР), в котором используются ортогональные сетки, и модели, основанные на методе конечных элементов (МКЭ), в котором узлы сетки могут быть распределены более рационально. Преимуществом численных методов является то, что они позволяют не только повысить точность решения полевой задачи, но и учесть такие факторы, как насыщение магнитной цепи машины, вытеснение тока в проводниках и сложность границ сред.
При расчете магнитных полей с учетом нелинейности свойств сред численными методами обычно применяют итерационный метод Ньютона-Рафсона. При этом при использовании метода конечных элементов матрицы коэффициентов имеют ленточную структуру, обеспечивающую снижение числа операций.
Современные программы, основанные на методе конечных элементов, позволяют рассчитывать ЭДС и токи обмоток статора и ротора, учитывать вращение ротора относительно статора, зубчатость сердечников, насыщение стали, наведение вихревых токов в массивных элементах конструкции, сложный характер распределения магнитного поля в зазоре. Кроме того, современные конечно-элементные программы позволяют рассчитывать объемные (трехмерные) конструкции. Точность расчетов по конечно- элементным программам была неоднократно подтверждена экспериментальными исследованиями. Говоря о времени решения, следует заметить следующее. Чем сложнее моделируемая машина, тем больше длительность процесса вычислений. Расчет рабочих режимов асинхронных машин при этом обладает еще и той особенностью, что частота токов, индуктированных в роторе, относительно мала. Если переходные процессы рассчитываются методом численного интегрирования системы дифференциальных уравнений, требующим разбиения всего рассматриваемого временного интервала на достаточно малые шаги, время, затрачиваемое на вычисления, может быть значительным.
Современные методы расчета[править | править код]
В целях сокращения времени и сохранения точности, появились другие методы. Такие подходы, как правило, применяют несколько методов одновременно, то есть являются комбинированными методами.
К этим методам относятся, в частности, методы, основанные на расчете эквивалентных схем замещения магнитных цепей, то есть на дискретизации электромагнитной системы в виде потока. Предполагается, что магнитное поле состоит из определенного числа магнитных трубок переменного сечения. В пределах каждой трубки поток постоянен, а все линии поля расположены строго параллельно стенкам трубок. Такой подход к созданию схем замещения обоснован только для ферромагнитных участков сердечников, для воздушного зазора он может быть применен с некоторыми допущениями. Определить форму, направление и число трубок поля в этой части машины трудно, особенно если учитывать взаимное перемещение сердечников.
Существуют методы, позволяющие правильно воспроизвести поле в воздушном зазоре. Это методы зубцовых контуров и эквивалентных проводимостей воздушного зазора.
В методе эквивалентных проводимостей магнитные проводимости воздушного зазора находятся как произведение частных проводимостей, найденных при односторонней и двусторонней зубчатости сердечников.
Более универсальным методом расчета электрических машин является МЗК. МЗК, первоначально разработанный для расчета гидрогенераторов , был затем обобщен и применен для расчета различных типов электрических машин, включая асинхронные машины с короткозамкнутым ротором.
В этих работах потокосцепления обмоток электрической машины выражаются через индуктивные параметры зубцовых контуров, образованных токами, лежащими на дне пазов или сосредоточенными, а стенках пазов. Такое представление источников поля позволяет использовать теорию скалярного магнитного потенциала, что заметно упрощает расчеты.
Идея МЗК заключается в представлении поля в воздушном зазоре электрической машины в виде суммы полей так называемых зубцовых контуров. Этот метод позволяет провести детальный анализ магнитного поля отдельного зубцового контура и определить магнитную проводимость в воздушном зазоре с учетом двусторонней зубчатости статора и ротора, взаимного перемещения сердечников, а так же реальной формы тока или напряжения обмотки якоря.
6.3.4. Принцип действия и устройство электрических машин переменного тока
Как и машины постоянного тока, электрические машины переменного тока состоят из статора и ротора. По способу образования магнитного поля статора и ротора машины переменного тока делятся на две группы: асинхронные и синхронные. В основе работы асинхронных и синхронных машин лежит образование вращающегося магнитного поля.
Обмотки статора обычно присоединяются к сети переменного тока и создают вращающееся магнитное поле, поэтому устройство этой части асинхронных и синхронных машин получается одинаковым.
Получение вращающегося магнитного поля. В асинхронных и синхронных машинах вращающееся магнитное поле статора образуется при протекании трехфазного тока в трех обмотках, оси которых сдвинуты в пространстве на 120°/р, где р — число пар полюсов обмотки. При р = 1 получается двухполюсное вращающееся магнитное поле, образование которого можно пояснить с помощью рис. 6.27.
| |
а | б |
|
|
в | г |
|
|
д | е |
Рис. 6.27 | |
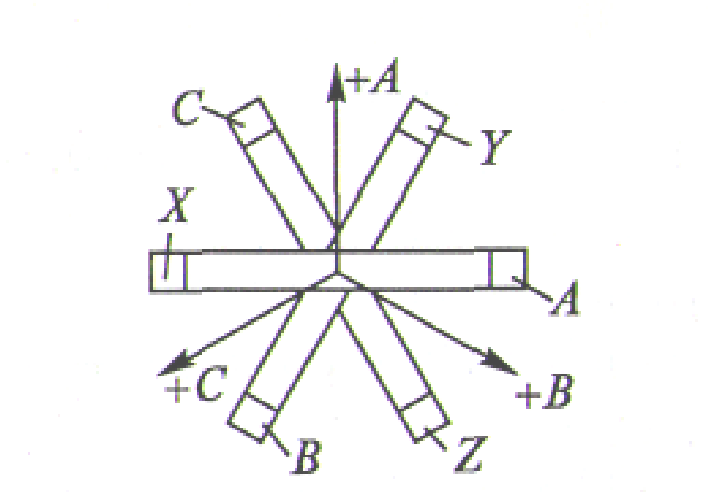
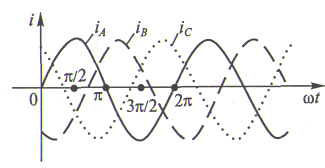
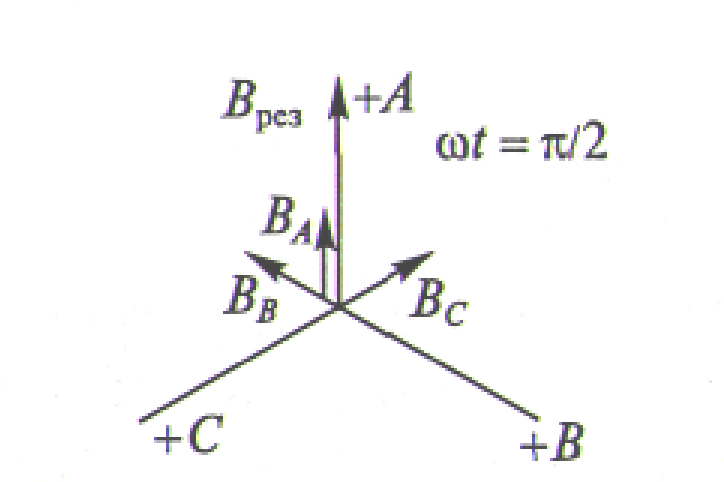
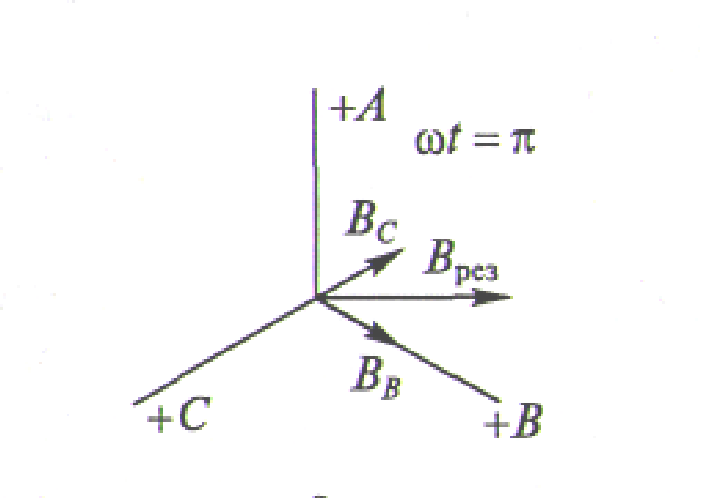
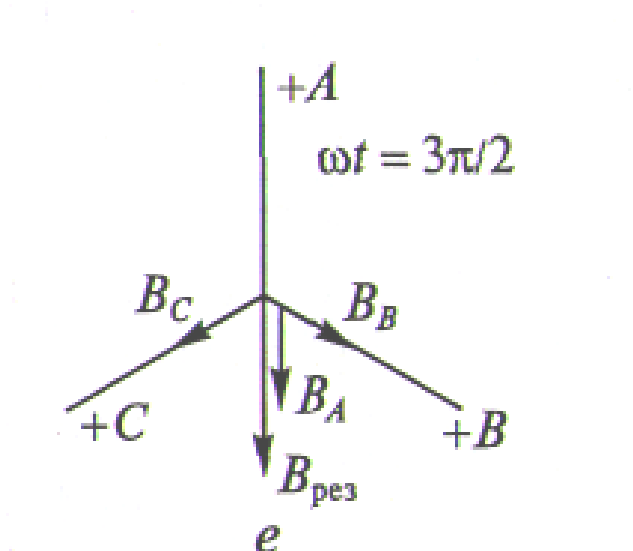
Расположим три одинаковые катушки AX, BY, CZ так, что их оси смещены на 120° по отношению друг к другу (рис. 6.27а). Присоединим катушки к симметричной трехфазной системе ЭДС. Пусть токи входят в начало катушек А, В, С и изменяются следующим образом:
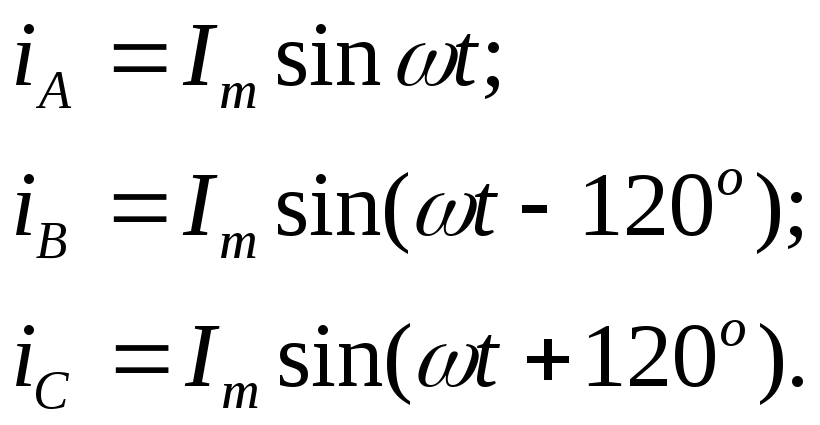
Графическое изменение этих токов во времени показано на рис. 6.27б.
Каждый из токов будет создавать пульсирующее поле, направленное вдоль оси своей катушки. Положительное направление магнитной индукции поля первой катушки в соответствии с правилом буравчика обозначим +А (ток направлен от начала катушки А к ее концу X), второй — +В, третьей — +С. Индукцию первой катушки обозначим ВА, второй – ВB, третьей — ВC.
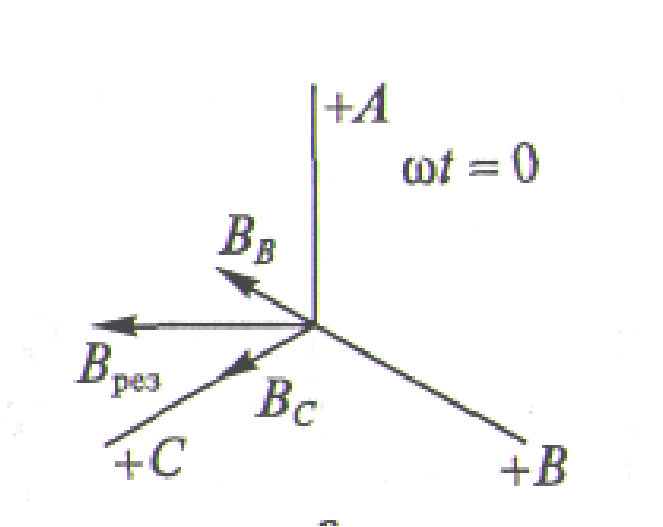
Изобразим
мгновенные значения ВА, ВB, ВС и
результирующую индукцию Врез для
моментов времени  (рис. 6.27в, г, д, е).
(рис. 6.27в, г, д, е).
Очевидно,
что с течением времени вектор результирующей
магнитной индукции, оставаясь по величине
неизменным, вращается в направлении от
начала первой катушки с током  к началу второй катушки с отстающим
током
к началу второй катушки с отстающим
током .
Если поменять токи двух любых катушек
местами, направление вращения поля
изменится на обратное.
.
Если поменять токи двух любых катушек
местами, направление вращения поля
изменится на обратное.
Таким
образом, полный оборот результирующий
вектор магнитной индукции двухполюсного
магнитного поля совершит за время,
равное периоду  переменного тока обмотки, т.е. частота
вращения двухполюсного магнитного поля
переменного тока обмотки, т.е. частота
вращения двухполюсного магнитного поля (об/мин), где
(об/мин), где — частота питающей сети.
— частота питающей сети.
Токи
в трехфазной обмотке могут возбуждать
не только двухполюсное, но и многополюсное
вращающееся магнитное поле. Для этого
количество катушек в фазе увеличивается
в число раз, равное требуемому числу
пар полюсов  магнитного поля, а размеры катушек
уменьшаются в такое же число раз.
магнитного поля, а размеры катушек
уменьшаются в такое же число раз.
Скорость вращения магнитного поля, образующего две пары полюсов, будет в два раза меньше, чем скорость вращения двухполюсного поля, так как за один период изменения токов полюсы поворачиваются на пространственный угол, равный 180о.
В общем случае
 (об/мин), (6.3)
(об/мин), (6.3)
где  —
число пар полюсов магнитного поля.
—
число пар полюсов магнитного поля.
Из выражения (6.3.) видно, что при принятой в нашей стране и многих других странах мира промышленной частоте 50 Гц частота вращения магнитных полей статора с трехфазной обмоткой при различном числе пар полюсов составит:
| 1 | 2 | 3 | 4 | 5 |
| 3000 | 1500 | 1000 | 750 | 600 |
Принцип действия и устройство асинхронного двигателя. Вращающееся поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС. При замкнутой обмотке ротора под действием ЭДС в обмотке возникают токи, направление которых определяется по правилу правой руки (рис. 6.28.). | |
Рис. 6.28 |
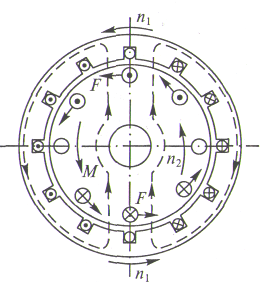
Взаимодействие
этих токов с полем статора создает
действующие на проводники электромагнитные
силы F,
направление
которых определяется по правилу левой
руки. Как видно из рис. 6.28, эти силы
стремятся повернуть ротор в направлении
вращения магнитного поля статора.
Совокупность сил F,
приложенных
к отдельным проводникам, создает на
роторе электромагнитный момент M,
приводящий
его в движение с частотой вращения  .
.
Относительную
разность  и
и принято
характеризовать безразмерной величиной,
называемой скольжением
принято
характеризовать безразмерной величиной,
называемой скольжением  .
Важнейшим
свойством асинхронной машины является
то, что при ее работе магнитное поле
статора и ротор перемещаются с разными
частотами вращения, не синхронно
(асинхронно), что и получило отражение
в наименовании этой машины.
.
Важнейшим
свойством асинхронной машины является
то, что при ее работе магнитное поле
статора и ротор перемещаются с разными
частотами вращения, не синхронно
(асинхронно), что и получило отражение
в наименовании этой машины.
Скольжение
асинхронного двигателя может изменяться
в пределах  .
При этом
.
При этом соответствует режиму холостого хода,
когда ротор не испытывает противодействующих
моментов, а
соответствует режиму холостого хода,
когда ротор не испытывает противодействующих
моментов, а соответствует неподвижному ротору(
соответствует неподвижному ротору( )
— режим короткого замыкания или пуска.
Обычно в номинальном режиме асинхронного
двигателя величина скольжения составляет
0,01…0,06.
)
— режим короткого замыкания или пуска.
Обычно в номинальном режиме асинхронного
двигателя величина скольжения составляет
0,01…0,06.
Как
и все электрические машины, асинхронные
двигатели обратимы, т. е. они могут
работать в режиме генератора, отдающего
энергию в трехфазную сеть. Для этого
внешними силами ротор необходимо
раскрутить до частоты вращения  ,
большей
чем
,
большей
чем  ,
при этом
,
при этом .
Токи обмотки ротора создают свое
собственное магнитное поле. Анализ
показывает, что независимо от частоты
вращения ротора, магнитное поле его
токов перемещается в пространстве с
той же частотой вращения
.
Токи обмотки ротора создают свое
собственное магнитное поле. Анализ
показывает, что независимо от частоты
вращения ротора, магнитное поле его
токов перемещается в пространстве с
той же частотой вращения ,
что
и магнитное поле статора, т.е. в любом
режиме асинхронной машины магнитные
поля статора и ротора взаимно неподвижны
друг относительно друга. Этим и
обеспечивается электромеханическое
преобразование энергии в асинхронной
машине.
,
что
и магнитное поле статора, т.е. в любом
режиме асинхронной машины магнитные
поля статора и ротора взаимно неподвижны
друг относительно друга. Этим и
обеспечивается электромеханическое
преобразование энергии в асинхронной
машине.
Рассмотренный принцип работы асинхронных машин определяет и их конструкцию, состоящую из статора и ротора. Статоры трехфазных асинхронных двигателей устроены одинаково, а роторы конструктивно отличаются друг от друга.
Основными частями статора являются корпус, сердечник и трехфазная обмотка. С корпусом прочно соединены два боковых подшипниковых щита с подшипниками, в которых вращается вал ротора.
Начала и концы фаз асинхронных машин состоят из пакета магнитопровода цилиндрической формы, набранного из стальных дисков с пазами, в которых располагаются обмотки. Пакет магнитопровода с обмоткой расположен на валу. Между пакетом ротора и пакетом сердечника статора имеется равномерный зазор.
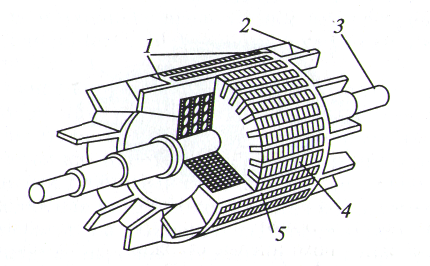
Различают два типа обмоток ротора. Обмотки первого типа содержат медные или алюминиевые стержни, вставляемые или заливаемые в пазы ротора без изоляции. Эти стержни замыкаются накоротко по обоим торцам пакета ротора медными или алюминиевыми кольцами соответственно. Двигатель с ротором такого типа называют короткозамкнутым или с «беличьей клеткой» (рис. 6.29а). Ротор также называется короткозамкнутым (рис. 6.29б).
| |
а | б |
Рис. 6.29 | |
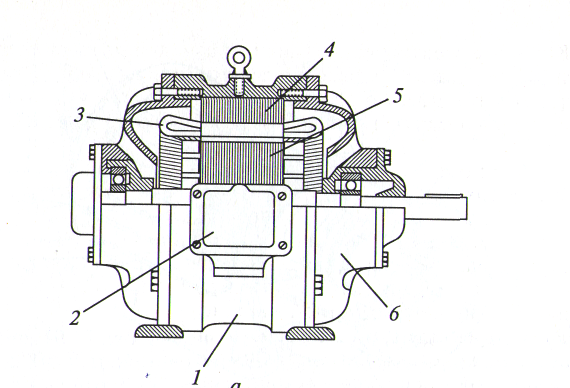
На рис. 6.29а обозначено: 1 — корпус статора; 2 — коробка выводов; 3 — обмотка статора; 4 — сердечник статора; 5 — ротор; 6 — подшипниковый щит.
На рис. 6.29б обозначено: 1 — замыкающие кольца; 2 вентиляционные лопасти; 3 — вал; 4 — пакет ротора; 5 — стержни обмотки.
В пазы обмоток второго типа укладывается трехфазная обмотка, как и на статоре. Фазы обмотки соединяются звездой и три свободных ее конца присоединяются к трем изолированным контактным кольцам, насаженным на вал (рис. 6.30а).
|
а |
|
б |
Рис. 6.30 |
На рис. 6.30а обозначено: 1 — вал; 2 — подшипниковый щит; 3 — щеткодержатель; 4 — крышка люка; 5 — обмотка статора; 6 — сердечник статора; 7 — кожух вентилятора; 8 — сердечник ротора; 9 — обмотка ротора; 10 — контактные кольца; 11 — крышка подшипника.
На рис. 6.30б обозначено: 1 — обмотка; 2 — контактные кольца; 3 – вал.
На боковом подшипниковом щите укрепляется щеткодержатель, причем так, чтобы расположенные в нем три группы щеток надежно соприкасались с контактными кольцами ротора. Ротор с катушечной трехфазной обмоткой и контактными кольцами называют фазным (рис. 6.30б). Машины с контактными кольцами допускают подключение внешней цепи к цепи ротора для изменения характеристик двигателя в процессе управления.
Асинхронные двигатели являются самыми распространенными электрическими машинами в промышленности и сельском хозяйстве.
Принцип действия и устройство синхронных машин. Синхронной называется такая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля статора, определяемой выражением (6.3).
Ротор такой машины представляет электромагнит, возбуждаемый постоянным током. В синхронных машинах малой мощности вместо обмотки на роторе могут использоваться постоянные магниты.
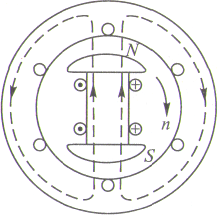
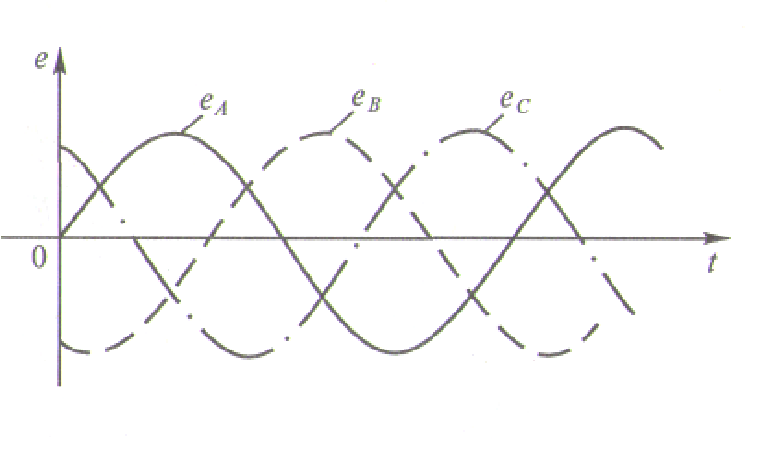
В режиме генератора ротор синхронной машины приводится во вращение первичным двигателем с номинальной скоростью, которая поддерживается постоянной автоматическим регулятором. После этого генератор возбуждается подачей постоянного тока в обмотку ротора. Вращающийся с постоянной скоростью поток полюсов (рис. 6.31а), пересекая трехфазную обмотку статора, наводит в ней ЭДС, одинаковые по амплитуде и частоте, сдвинутые по фазе относительно друг друга на угол 120° (рис. 6.31б).
|
|
а | б |
Рис. 6.31 | |
На рис. 6.32 изображено устройство трехфазной синхронной машины.
|
Рис. 6.32 |
На рис. 6.33 обозначено: 1 – сердечник статора; 2 – трехфазная обмотка статора; 3 – полюсы ротора с обмоткой постоянного тока; 4 – кольца для соединения обмотки ротора с источником постоянного тока; 5 – вентиляторы.
По устройству ротора различают два типа синхронной машины: машина с явнополюсным ротором, в которой катушки обмотки постоянного тока размещены на выступающих полюсах (рис. 6.33а), и машина с неявнополюсным ротором, в котором распределенная обмотка постоянного тока уложена в пазы ротора (рис. 6.33б).
Явнополюсная синхронная машина изготовляется для скорости вращения до 1500 об/мин и используется в качестве генератора или двигателя. Наиболее крупные синхронные машины устанавливаются на гидроэлектростанциях и приводятся во вращение водяными турбинами со скоростью до 300 об/мин.
| |
а | б |
Рис. 6.33 | |
Неявнополюсная синхронная машина используется в основном как генератор на тепловых электростанциях и приводится во вращение паровой турбиной со скоростью обычно 3000 об/мин (при частоте 50 Гц).
ЭДС
в обмотках машин переменного тока. Вращающееся
магнитное поле статора
асинхронных и синхронных машин индуцирует
в фазных обмотках статора ЭДС,
пропорциональную магнитной индукции
магнитного потока Ф полюса вращающегося магнитного поля и
относительной скорости перемещения
проводника обмотки относительно поля.
Последняя пропорциональна частоте
вращения магнитного поля  и, следовательно,
частоте сети
и, следовательно,
частоте сети  (6.3), поэтому действующее значение ЭДС
фазы статора определяется по формуле
(6.3), поэтому действующее значение ЭДС
фазы статора определяется по формуле
 , (6.4)
, (6.4)
где  ,
— конструктивный коэффициент, зависящий
от геометрических размеров машины, типа
и параметров обмотки статора.
,
— конструктивный коэффициент, зависящий
от геометрических размеров машины, типа
и параметров обмотки статора.
В синхронной машине ротор вращается синхронно с полем статора, т.е. по отношению к вращающемуся полю, обмотка ротора неподвижна и в ее проводниках ЭДС не индуцируется.
Напротив,
в асинхронной машине частоты вращения
магнитного поля статора  и ротора
и ротора  неодинаковы.
Поэтому обмотка ротора перемещается
относительно вращающегося поля статора
с частотой скольжения
неодинаковы.
Поэтому обмотка ротора перемещается
относительно вращающегося поля статора
с частотой скольжения  .
.
В
соответствии с этим ЭДС ротора асинхронной
машины вращающегося со скольжением  определяется по формуле
,
где
определяется по формуле
,
где — конструктивный коэффициент обмотки
ротора.
— конструктивный коэффициент обмотки
ротора.
Машины переменного тока: устройство, принцип работы, применение
Электрические машины выполняют ответственную функцию преобразования энергии в рабочих механизмах и генераторных станциях. Такие устройства находят свое место в разных областях, снабжая исполнительные органы достаточным силовым потенциалом. Одну из самых востребованных систем данного типа представляют машины переменного тока (МПТ), которые имеют несколько разновидностей и отличий внутри своего класса.
Общие сведения об МПТ
Сегмент МПТ или электромеханических преобразователей можно условно разделить на однофазные и трехфазные системы. Также на базовом уровне выделяют асинхронные, синхронные и коллекторные устройства, при этом общий принцип действия и конструкционное исполнение у них имеет много схожего. Данная классификация машин переменного тока носит условный характер, поскольку современные станции электромеханического преобразования частично задействуют рабочие процессы от каждой группы устройств.
Как правило, в основе МПТ находится статор и ротор, между которыми предусматривается воздушный зазор. Опять же, независимо от типа машины, рабочий цикл строится на вращении магнитного поля. Но если в синхронной установке движение ротора соответствует направлению силового поля, то в асинхронной машине ротор может двигаться в другом направлении и с разными частотами. Это различие обуславливает и особенности применения машин. Так, если синхронные могут выступать и в качестве генератора, и как электромеханический двигатель, то асинхронные в основном используют как двигатели.
Что касается количества фаз, то выделяют одно- и многофазные системы. Причем, с точки зрения практического использования, заслуживают внимание представители второй категории. Это по большей части трехфазные машины переменного тока, в которых функцию энергоносителя как раз выполняет магнитное поле. Однофазные же устройства ввиду эксплуатационной непрактичности и крупных размеров постепенно выходят из практики применения, хотя в некоторых сферах решающим фактором их выбора является низкая стоимость.
Отличия от машин постоянного тока
Принципиальная конструкционная разница заключается в расположении обмотки. В системах переменного тока она охватывает статор, а в машинах постоянного тока – ротор. В обеих группах электродвигатели различаются по типу возбуждения тока – смешанные, параллельные и последовательные. Сегодня машины переменного и постоянного тока используются в промышленности, сельском хозяйстве и в бытовой сфере, однако первый вариант более привлекателен по своим эксплуатационным качествам. Генераторы и двигатели переменного тока выигрывают за счет более технологичной конструкции, надежности и высокой энергетической отдачи.
Применение устройств, работающих на постоянном токе, распространено в сферах, где на первый план выходят требования к точности регулирования рабочих параметров. Это могут быть тяговые механизмы транспорта, обрабатывающие станки и сложные измерительные приборы. В плане производительности машины постоянного и переменного тока имеют высокий КПД, но с разными возможностями технико-конструкционной подстройки под конкретные условия применения. Работа с постоянным током дает больше возможностей для управления частотой вращения, что важно при обслуживании серводвигателей и шаговых моторов.
Устройство асинхронной МПТ
Для технической основы данного устройства в виде ротора и статора используется листовая сталь, которую перед сборкой покрывают изоляционным масляно-канифольным слоем с обеих сторон. В машинах малой мощности сердечник может выполняться из электрической стали без дополнительного покрытия, поскольку изолятором в данном случае выступает естественный оксидный слой на металлической поверхности. Статор фиксируется в корпусе, а ротор на валу. В асинхронных машинах переменного тока большой мощности сердечник ротора может крепиться и на ободе корпуса втулкой, насаженной на вал. Непосредственно вал должен вращаться на подшипниковых щитах, которые также фиксируются к основе корпуса.
Внешние поверхности ротора и внутренние поверхности статора изначально обеспечиваются пазами для размещения проводников обмотки. У статора машин переменного тока обмотка чаще выполняется трехфазной и подключается к соответствующей сети на 380 В. Ее также называют первичной. Аналогично выполняется и обмотка ротора, окончания которой обычно формируют соединение в конфигурации звезды. Предусматриваются и контактные кольца, через которые дополнительно может подключаться реостат для регулировки или трехфазный пусковой элемент.
Важно отметить и параметры воздушного зазора, который выполняет функцию демпферной зоны, снижающей шум, вибрации и нагрев при работе устройства. Чем габаритнее машина, тем больше должен быть зазор. Его величина может варьироваться от одного до нескольких миллиметров. Если конструкционно невозможно оставить достаточно места для воздушной зоны, то предусматривается система дополнительного охлаждения установки.
Принцип работы асинхронной МПТ
Трехфазную обмотку в данном случае подключают к симметричной сети с трехфазным напряжением, в результате чего в воздушном зазоре формируется магнитное поле. Относительно обмотки якоря принимаются специальные меры для достижения гармонического пространственного распределения поля для демпферного зазора, что образует систему вращающихся магнитных полюсов. Согласно принципу действия машины переменного тока, на каждом полюсе формируется магнитный поток, который пересекает контуры обмотки, тем самым провоцируя генерацию электродвижущей силы. В трехфазной обмотке индуцируется трехфазный ток, обеспечивающий вращающий момент двигателя. На фоне взаимодействия тока ротора с магнитными потоками происходит формирование электромагнитной силы на проводниках.
Если ротор под действием внешней силы приводится в движение, направление которого соответствует направлению потоков магнитного поля машины переменного тока, то ротор начнет обгонять темпы вращения поля. Это происходит в тех случаях, когда частота вращения статора превосходит номинальную синхронную частоту. В то же время будет изменено направление движения электромагнитных сил. Таким образом формируется тормозящий момент с обратным действием. Данный принцип работы позволяет использовать машину и в качестве генератора, работающего в режиме отдачи активной мощности в сеть.
Устройство и принцип действия синхронных МПТ

В части исполнения и расположения статора синхронная машина похожа на асинхронную. Обмотка называется якорем и выполняется с тем же количеством полюсов, как и в предыдущем случае. У ротора предусматривается обмотка возбуждения, энергетическое снабжение которой обеспечивают контактные кольца и щетки, подключенные к источнику постоянного тока. Под источником подразумевается маломощный генератор-возбудитель, устанавливаемый на одном валу. В синхронной машине переменного тока обмотка выполняет функцию генератора первичного магнитного поля. В процессе проектирования конструкторы стремятся создавать условия для того, чтобы индукционное распределение поля возбуждения на поверхностях статора было как можно ближе к синусоидальному.
При повышенных нагрузках обмотка статора формирует магнитное поле с вращением в направлении ротора с аналогичной частотой. Таким образом образуется единое поле вращения, при котором поле статора будет оказывать воздействие на ротор. Данное устройство машин переменного тока позволяет их использовать как электродвигатели, если изначально обеспечивается подводка трехфазного тока к синхронной обмотке. Такие системы создают условия для координированного вращения ротора с частотой, соответствующей полю статора.
Явнополюсные и неявнополюсные синхронные машины
Главным отличием явнополюсных систем является присутствие в конструкции выступающих полюсов, которые крепятся к специальным выступам вала. В типовых механизмах фиксация выполняется с помощью Т-образных хвостовых крепежей к ободу крестовины или валу через втулку. В устройстве машин переменного тока малой мощности эта же задача может решаться болтовыми соединениями. В качестве материала обмотки используется полосовая медь, которую наматывают на ребро, изолируя специальными прокладками. В наконечниках с полюсами в пазах размещаются стержни обмотки для пуска. В этом случае применяется материал с высоким удельным сопротивлением наподобие латуни. Контуры обмотки по торцам приваривают к короткозамыкающим элементам, образуя общие кольца для короткого замыкания. Явнополюсные машины с силовым потенциалом на 10-12 кВт могут выполняться в так называемой обращенной конструкции, когда якорь вращается, а полюса индуктора сохраняют неподвижное состояние.

У неявнополюсных машин конструкция базируется на цилиндрическом роторе, выполняемом из стальной поковки. В роторе присутствуют пазы для формирования обмотки возбуждения, полюса которой рассчитываются на высокие частоты вращения. Однако применение такой обмотки в электрических машинах с переменным током большой мощности невозможно из-за высокой степени износа ротора в жестких условиях эксплуатации. По этой причине даже в установках средней мощности для роторов применяют высокопрочные компоненты из цельных поковок на основе хромоникельмолибденовых или хромоникелевых сталей. В соответствии с техническими требованиями к прочности, максимальный диаметр рабочей части у ротора неявнополюсной синхронной машины не может быть выше 125 см. Это объясняет необычный форм-фактор ротора с удлиненным корпусом, хотя и по данному параметру есть ограничения, связанные с увеличением вибраций у слишком длинных элементов. Предельная длина ротора составляет 8,5 м. К неявнополюсным агрегатам, которые используются в промышленности, можно отнести различные турбогенераторы. С их помощью, в частности, связывают рабочие моменты паровых турбин с тепловыми энергостанциями.
Особенности вертикальных гидрогенераторов
Отдельный класс явнополюсных синхронных МПТ, обеспеченных вертикальным валом. Такие установки подключаются к гидравлическим турбинам и подбираются под мощности обслуживаемых потоков по частоте вращения. Большинство машин переменного тока данного типа являются тихоходными, но при этом имеют большое количество полюсов. Среди ответственных рабочих компонентов вертикального гидрогенератора можно отметить упорный подшипник и подпятник, на который приходится нагрузка от вращающихся частей движка. На подпятник, в частности, накладывается и давление от потоков воды, которая действует на турбинные лопасти. Кроме того, для остановки вращения предусматривается тормоз, а в рабочей структуре также присутствуют направляющие подшипники, воспринимающие радиальные усилия.
В верхней части машины наряду с гидрогенератором могут размещаться вспомогательные агрегаты – например, возбудитель генератора и регулятор. К слову, последний представляет собой самостоятельную машину переменного тока с обмоткой и полюсами на постоянных магнитов. Данная установка обеспечивает питание двигателя для обеспечения функции автоматического регулятора. В больших вертикальных гидрогенераторах возбудитель может заменяться синхронным генератором, который вместе с возбудительными узлами и ртутными выпрямителями обеспечивает энергоснабжение силовых устройств, обслуживающих рабочий процесс основного гидрогенератора. Конфигурация машины с вертикальным валом также используется в качестве приводного механизма мощных гидравлических насосов.
Коллекторные МПТ

Наличие коллекторного узла в конструкции МПТ зачастую обуславливается необходимостью выполнения функции преобразования частоты вращения в электрической связи разночастотных цепей на обмотках ротора и статора. Это решение позволяет наделять устройство дополнительными эксплуатационными свойствами, в числе которых автоматическая регуляция рабочих параметров. Коллекторные машины переменного тока, которые подключаются к трехфазным сетям, получают по три щеточных пальца в каждом сегменте двойного полюсного деления. Соединение щеток между собой выполняется по параллельной схеме перемычками. В этом смысле коллекторные МПТ похожи на электродвигатели с постоянным током, но отличаются от них количеством применяемых щеток на полюсах. Помимо этого, статор в данной системе может иметь несколько дополнительных обмоток.
Замкнутая обмотка якоря при использовании коллектора с трехфазными щетками будет представлять собой трехфазную комплексную обмотку с соединением в виде треугольника. В процессе вращения якоря каждая фаза обмотки сохраняет неизменную позицию, однако секции поочередно переходят от одной фазы к другой. Если в коллекторной машине переменного тока используется шестифазный комплект щеток со сдвигом на 60° относительно друг друга, то формируется шестифазная обмотка с соединением по схеме многоугольника. На щетках многофазной машины с коллекторной группой частота тока определяется вращением магнитного потока по отношению к неподвижным щеткам. Направление вращения ротора может быть как встречным, так и согласованным.
Применение МПТ
Сегодня МПТ используются всюду, где в том или ином виде требуется генерация механической или электрической энергии. Крупные производительные агрегаты применяются в обслуживании инженерных систем, энергетических станций и подъемно-транспортных узлов, а маломощные – в обычной бытовой технике от вентиляторов до насосов. Но в обоих случаях назначение машин переменного тока сводится к выработке энергетического потенциала в достаточном объеме. Другое дело, что имеют принципиальное значение конструкционные отличия, реализация внутренней конфигурации статора и ротора, а также управляющая инфраструктура.
Хотя общее устройство МПТ на протяжении длительного времени сохраняет один и тот же набор функциональных компонентов, повышающиеся требования к эксплуатации таких систем заставляют разработчиков вносить дополнительные органы контроля и управления. На современном этапе технологического развития особенно в контексте применения машин переменного тока в производственной сфере эксплуатацию подобных двигателей и генераторов сложно представить без высокоточных средств регуляции рабочих параметров. Для этого используются самые разные способы управления – импульсный, частотный, реостатный и т.д. Внедрение автоматики в регулирующую инфраструктуру также является характерной чертой современной эксплуатации МПТ. Управляющая электроника подключается к силовой установке с одной стороны, а с другой – к программным контроллерам, которые по заданному алгоритму дают команды на установку конкретных параметров работы механизма.
Заключение

Генераторы тока и электродвигатели являются обязательным силовым компонентом в современной промышленности. За счет их функции работают станки, транспорт, коммуникационные установки и прочие электротехнические агрегаты и приборы, требующие энергоснабжения. При этом существует огромный массив видов и подвидов электрические машины переменного и постоянного тока, особенности и характеристики которых в итоге определяют нишу для их эксплуатации. К технико-эксплуатационным особенностям МПТ можно отнести более простое конструкционное устройство и относительно низкие требования к обслуживанию. С другой стороны, машины постоянного тока оказываются более привлекательным решением задач энергоснабжения в сложных ответственных системах питания. Отечественный производственный сегмент энергетического промышленного оборудования имеет огромный опыт в проектировании и выпуске электрических машин обоих типов. Крупные предприятия все больший упор делают на разработку индивидуальных решений с конструкционными и эксплуатационными особенностями. Отклонения от типовых проектов часто связаны с необходимостью подключения вспомогательных функциональных узлов и оборудования наподобие систем охлаждения, защитных средств от перегрева и сетевых колебаний, дополнительного и резервного питания. Кроме того, на часть конструкционных свойств электрических машин немалое влияние оказывает внешняя среда эксплуатации, что также учитывается на этапах проектирования и создания техники.
виды и принцип их работы
 Машины постоянного тока представляют собой возвратную электрическую машину, в которых происходит процесс преобразования энергии. В машинах, где механическая энергия преобразуется в электрическую, называются генераторами. Они предназначены для выработки электроэнергии. Для работы необходимо наличие какого-либо двигателя (дизеля, паровой или водяной турбины), который будет вращать вал генератора.
Машины постоянного тока представляют собой возвратную электрическую машину, в которых происходит процесс преобразования энергии. В машинах, где механическая энергия преобразуется в электрическую, называются генераторами. Они предназначены для выработки электроэнергии. Для работы необходимо наличие какого-либо двигателя (дизеля, паровой или водяной турбины), который будет вращать вал генератора.
Обратное преобразование энергий происходит в электродвигателях. Они приводят в движение колесные пары локомотивов, вращают валы вентиляторов и т.д. Для работы необходимо подсоединение электродвигателя с источником электроэнергии посредством проводов.
Принцип работы электрических машин постоянного тока основан на использовании явления электромагнитной индукции, а также законов, которые определяют взаимодействие электрических токов и магнитных полей.
Эти машины включают в себя неподвижную и вращающуюся части. В конструкцию неподвижной части, или статора входят станина, главные и дополнительные полюса, подшипниковые щиты и щеточная траверса с графитовыми или медно-графитовыми щетками.
Вращающаяся часть, или ротор, в электрических машинах постоянного тока именуются якорем. Якорь, снабженный коллектором, в электродвигателях играет роль преобразователя частоты, а в генераторах – выпрямителя.
При вращении машины происходит перемещение якоря и статора относительно друг друга. Статор создает магнитное поле, а в обмотке якоря индуцируется э. д. с. Возникает ток, который при воздействии с магнитным полем создает электромагнитные силы, отвечающие за процесс преобразования энергии.
Электрические машины постоянного тока в зависимости от наличия или отсутствия коммутации бывают обычными и униполярными, а по расположению вала — вертикальными и горизонтальными.
По типу переключателей тока их можно подразделить на машины с щеточно-коллекторным и электронным переключателем. Последние называются еще вентильными электродвигателями.
По мощности они делятся на микромашины мощностью до 0,5 кВт, а также, машины малой, средней и большой мощности — 0,5-10 кВт, 10-200 кВт и более 200 кВт соответственно.
По частоте вращения различают тихоходные (до 300 об/мин), средней быстроходности (300-500 об/мин), быстроходные (1500-6000 об/мин) и сверхбыстроходные (более 6000 об/мин) электрические машины постоянного тока.