
Электрический двигатель — это… Что такое Электрический двигатель?
 Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравненияЭлектрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Принцип действия
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. Сейчас эти двигатели редкость, так как на рынке появились преобразователи частоты, ранее же они очень часто использовались в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трехфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует эдс), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов. Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трехфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надежнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно с вращающимся полем статора. Там, где нет трехфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f: nc=f/p
При частоте 50 Гц получаем для р = 1, 2, 3 (двух-, четырех- и шести полюсных машин) синхронные частоты вращения поля nc = 3000, 1500 и 1000 об/мин.
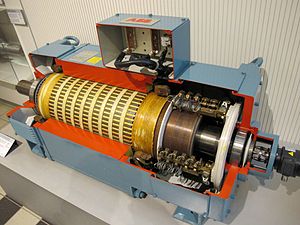
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с беличьей клеткой) или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Источник
Устройство асинхронного двигателя http://techno.x51.ru/index.php?mod=text&uitxt=905
Классификация электродвигателей
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока
 Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щёткамиДвигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.[1]
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
- Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.[2]
Двигатели переменного тока
 Трехфазные асинхронные двигатели
Трехфазные асинхронные двигателиДвигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).[2]
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Примечания
Литература
- Белов М. П., Новиков В. А., Рассудов Л. Н. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. — 3-е изд., испр. — М.: Издательский центр «Академия», 2007. — 575 с. — (Высшие профессиональное образование). — 1000 экз. — ISBN 978-5-7695-4497-2
Ссылки
двигатель электрический — это… Что такое двигатель электрический?
- двигатель электрический
- дви́гатель электри́ческий
-
машина электрическая, преобразующая электрическую энергию в механическую. Различают электрические двигатели постоянного и переменного тока. Основное преимущество двигателей постоянного тока заключается в возможности экономной и плавной регулировки частоты вращения, вследствие чего они получили распространение на рельсовом и безрельсовом электрифицированном транспорте, в подъёмных кранах, на прокатных станах, в устройствах автоматики и т.
п. В системах автоматического регулирования и в электроприборах бытового назначения получили распространение электроприводы с микродвигателями постоянного тока. Основное их достоинство – значительно большие, чем у микродвигателей переменного тока, диапазон и точность регулирования.

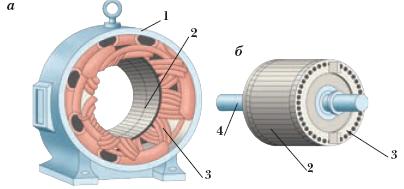
Асинхронный электродвигатель в разобранном виде:
1 – станина; 2 – сердечник из штампованных стальных листов; 3 – обмотка; 4 – вал
Двигатели переменного тока делятся на синхронные, асинхронные и коллекторные. В синхронных двигателях обмотка статора подключается к сети переменного тока, а обмотка ротора (в большинстве конструкций) – к источнику постоянного тока. В результате взаимодействия магнитных полей статора и ротора возникает крутящий момент, под действием которого ротор вращается синхронно с вектором напряжённости магнитного поля статора, т. е. частота вращения ротора жёстко связана с частотой питающего тока. Синхронные электродвигатели применяют в электроприводах, не требующих регулирования частоты вращения при отсутствии значительных перегрузок на валу двигателя (напр., для привода насосов, компрессоров, вентиляторов и т. д.). Наиболее распространены асинхронные электродвигатели. Они просты в изготовлении, надёжны в эксплуатации и потому являются основными двигателями в электроприводе. В асинхронном двигателе вращающееся магнитное поле, возникающее при прохождении переменного тока по обмоткам статора, взаимодействует с током, наведённым магнитным полем статора в обмотках ротора, в результате возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля. Частота вращения ротора асинхронного электродвигателя зависит от частоты вращения магнитного поля статора (определяется частотой питающего тока), числом пар полюсов двигателя и уменьшается с увеличением нагрузки. Направление вращения асинхронного электродвигателя изменяют переключением любых двух фаз обмотки статора. Коллекторные двигатели позволяют плавно регулировать частоту вращения в широких пределах, но они дороже и менее надёжны, чем синхронные и асинхронные электродвигатели. Мощность электродвигателей – от долей ватта до нескольких десятков мегаватт.
Энциклопедия «Техника». — М.: Росмэн. 2006.
.
- двигатель внутреннего сгорания
- движитель
Смотреть что такое «двигатель электрический» в других словарях:
двигатель электрический — асинхронный (в разрезе): 1 вал ротора; 2 подшипник; 3 крышка подшипника наружная; 4 щит подшипника; 5 пакет ротора; 6 сердечник статора; 7 станина; 8 кожух вентилятора; 9 вентилятор;… … Сельское хозяйство. Большой энциклопедический словарь
ДВИГАТЕЛЬ ЭЛЕКТРИЧЕСКИЙ — см. Электродвигатель. Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР, 1941 … Морской словарь
Двигатель электрический — – электрическая машина, которая преобразует электрическую энергию в механическую. [СТ МЭК 50(151) 78] Рубрика термина: Энергетическое оборудование Рубрики энциклопедии: Абразивное оборудование, Абразивы, Автодороги … Энциклопедия терминов, определений и пояснений строительных материалов
ДВИГАТЕЛЬ ЭЛЕКТРИЧЕСКИЙ — электродвигатель, энергосиловая машина, преобразующая электрич. энергию в механическую. Двигатель электрический асинхронный (в разрезе): 1 вал ротора; 2 подшипник; 3 крышка подшипника наружная; 4 щит подшипника; 5 пакет ротора; 6 сердечник… … Сельско-хозяйственный энциклопедический словарь
Двигатель электрический — Электродвигатели разной мощности (750 Вт, 25 Вт, к CD плееру, к игрушке, к дисководу) Электрический двигатель это, электрическая машина, в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.… … Википедия
ДВИГАТЕЛЬ ЭЛЕКТРИЧЕСКИЙ — электродвигатель, электрич. машина, преобразующая электрич. энергию в механическую. По роду тока Д. э. подразделяют на двигатели пост. тока, осн. преимущество к рых заключается в возможности сравнительно простого осуществления плавной регулировки … Большой энциклопедический политехнический словарь
Двигатель электрический — машина, преобразующая электрическую энергию в механическую. Д. э. основной вид двигателя в промышленности (см. Электропривод), на транспорте (см. Тяговый электродвигатель), в быту и т. д. По роду тока различают постоянного тока… … Большая советская энциклопедия
Двигатель — энергосиловая машина, преобразующая какой либо вид энергии в механическую работу. В зависимости от типа Д. работа может быть получена от вращаюшегося ротора, возвратно поступательно движущегося поршня или от реактивного аппарата. Д.… … Большая советская энциклопедия
Электрический двигатель — см. Двигатель электрический … Большая советская энциклопедия
электрический двигатель — см. Двигатель электрический. Энциклопедия «Техника». М.: Росмэн. 2006 … Энциклопедия техники
Линейный двигатель — Википедия
 Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит.
Лабораторный синхронный линейный двигатель. На заднем плане статор — ряд индукционных катушек, на переднем плане — подвижный вторичный элемент, содержащий постоянный магнит. 
Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например:
- линейные асинхронные электродвигатели (ЛАД),
- линейные синхронные электродвигатели,
- линейные электромагнитные двигатели,
- линейные магнитоэлектрические двигатели,
- линейные магнитострикционные двигатели,
- линейные пьезоэлектрические (электрострикционные) двигатели и др.
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающую энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трёхфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведёт к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнёт двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причём использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы. Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трёхфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращённом режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплён под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создаёт на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закреплённом статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
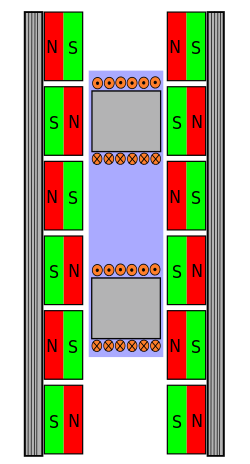 Схема синхронного линейного двигателя.
Схема синхронного линейного двигателя.Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающим 96%. Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надёжности и КПД. Ещё одно преимущество связано с независимостью силы тяги от силы сцепления колёс с рельсовым путём, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колёс электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колёс по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить её проскальзывание, повысить скорость и надёжность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебёдки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъёма ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебёдки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Линейный двигатель показал высокие характеристики и на металлорежущем оборудовании. Так на шлифовальных станках 3В130Ф4 установлен именно линейный двигатель для изменения положения бабки шлифовальной. На электроэрозионных станках и станках лазерной резки, так же устанавливают линейные двигатели
- Станки для набор электрических схем также требуют решений на линейных двигателях.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещённым в магнитное поле. Под действием этой силы металл начнёт перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла.[2]
- Вертикальные линейные двигатели используются для лифтов в высотных зданиях, что позволяет обойтись без затраты энергии на подъём троса кабины лифта.
Линейные двигатели высокого и низкого ускорения[править | править код]
Все линейные двигатели можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности. Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также, гипотетически, могут использоваться в специальных устройствах, таких, как оружие или пусковые установки космических кораблей.
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
- ↑ Линейные асинхронные двигатели — Принцип действия
- ↑ Линейные электродвигатели
Однофазный двигатель — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 19 мая 2014; проверки требуют 7 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 19 мая 2014; проверки требуют 7 правок.Однофа́зный дви́гатель — электродвигатель, конструктивно предназначенный для подключения к однофазной сети переменного тока.
Фактически является двухфазным, но вследствие того, что рабочей является только одна обмотка, двигатель называют однофазным.
Строго говоря, именно однофазным называется такой асинхронный двигатель, который имеет на статоре одну рабочую обмотку, которая подключается к сети однофазного тока. Запуск осуществляется вращающимся магнитным полем, создающимся основной обмоткой и дополнительной (меньшей) пусковой обмоткой, которая подключается через ёмкость/индуктивность к основной сети на время пуска или замыкается накоротко (в двигателях малой мощности).
Преимуществом двигателя является простота конструкции (короткозамкнутый ротор). Недостатки — малый пусковой момент (или вообще его отсутствие) и низкий КПД.
Применяются в основном в вентиляторах малой мощности (настольных, оконных, для ванных комнат и т. п.). Самым массовым советским вентилятором такого типа (и двигателем для него) был «ВН-2» мощностью 15 Ватт. Особенностью его конструкции является установка шарикового подшипника только с одной стороны вала двигателя (противоположной крыльчатке вентилятора), в результате из-за значительных изгибающих нагрузок подшипник (и двигатель) сильно шумит даже на малых оборотах.
Однофазный ток статора электродвигателя создает пульсирующее магнитное поле, которое можно разложить на два поля, имеющих равные амплитуды и вращающиеся в противоположные стороны с одинаковой частотой. При неподвижном роторе эти поля создают одинаковые по величине, но разные по знаку моменты. Поэтому при пуске результирующий момент двигателя, не имеющего специальных пусковых приспособлений, равен нулю, и двигатель не может начать вращаться. Однако если ротор привести во вращение в ту или иную сторону, то один из моментов будет преобладать и вал двигателя будет продолжать вращаться в сторону начального вращения [1].
Для создания пускового момента может использоваться пусковая обмотка, подключаемая на короткое время при запуске двигателя[2]. Для создания вращающегося магнитного поля необходимо, чтобы магнитный поток через пусковую обмотку был сдвинут по фазе относительно рабочей. Для этого может применяться конденсатор (именно для пусковой обмотки используется редко из-за значительных габаритов конденсатора), либо комбинация из индуктивности и активного сопротивления самой пусковой обмотки. Так как обмотка подключается на короткое время, потери, и следовательно, нагрев пусковой обмотки не имеет большого значения.
Другой способ создания пускового момента — использование экранированных полюсов[2]. В таком двигателе полюса расщепляются и на часть наконечников надевается короткозамкнутая обмотка — экран. Такие двигатели имеют низкий КПД и пусковой момент, потому используются только в маломощных приборах.
Не вполне корректно однофазными двигателями также называют конструктивно двух- и трёхфазные асинхронные электродвигатели, подключаемые через схемы согласования в однофазную сеть (конденсаторные двигатели).
Двухфазный двигатель, как правило, проектируется именно в расчёте на работу в однофазной сети (как конденсаторный двигатель). Обе его обмотки (фазы двигателя) являются рабочими и включены постоянно — одна непосредственно в сеть, вторая — через фазосдвигающую цепь (как правило, конденсаторы). Он имеет лучшие эксплуатационные параметры из всех типов асинхронных двигателей при работе в однофазной сети. Широко применялся в активаторных стиральных машинах советского времени.
Трехфазный асинхронный электродвигатель также может работать в однофазной сети с потерей мощности. При этом для запуска необходима фазосдвигающая цепь, которая обычно строится или из ёмкости или из индуктивности:
- При ёмкостном запуске на одну из обмоток подаётся напряжение (ток) через ёмкость, которая сдвигает фазу тока вперёд на 90° (без учёта потерь). После запуска напряжение с фазосдвигающей обмотки можно снять.
- При индуктивном запуске на одну из обмоток подаётся напряжение (ток) через индуктивность, которая сдвигает фазу тока назад на 90° (без учёта потерь). После запуска напряжение с фазосдвигающей обмотки можно снять.
- В некоторых случаях, при питании от однофазной сети, запуск осуществляется вручную проворотом ротора. После проворота ротора двигатель работает самостоятельно.
- ↑ Однофазный асинхронный электродвигатель. (рус.). Инженерные решения. Дата обращения 18 мая 2014.
- ↑ 1 2 Кацман М.М. Электрические машины. — М.: Высшая школа, 1990. — С. 208—217. — 464 с. — 100 000 экз. § 16. Однофазные и конденсаторные двигатели
Однофазный электродвигатель
Электрический ракетный двигатель термический — Википедия
Материал из Википедии — свободной энциклопедии
Первая в мире действующая модель электрического термического ракетного двигателя созданная под руководством В. П. Глушко в 1929 году.Электрический ракетный двигатель термический — тип электрического ракетного двигателя, характеризуется тем, что вначале электрическая энергия используется для нагрева рабочего тела (газа). Затем термическая энергия струи преобразуется в кинетическую энергию струи в со́пле. Обычно это сопло Лаваля, позволяющее ускорить газ до сверхзвуковых скоростей. Первая в мире действующая модель данного двигателя была получена в 1929 году газодинамической лабораторией Ленинградский Физико-технического института под руководством Глушко В. П.[1]
Двигатели делятся по типу нагрева газа. Самый простой — электронагревный. В нём газ нагревается за счёт теплообмена с нагревательным элементом. Нагревательный элемент делается из электропроводящего материала, выдерживающего высокие термические нагрузки (графит, сплавы вольфрама, молибдена, рения). В электродуговом электрическом двигателе газ нагревается в электрической дуге постоянного или переменного тока.
Так как газ не может быть нагрет выше температуры нагревателя, наибольшую скорость истечения можно получить при той же температуре с газом малой молекулярной массы (водород, гелий). На практике использование водорода затруднено из-за сложности его хранения. Иногда используется аммиак или гидразин, которые хранятся в жидком виде. Также возможно использование азота и других химически инертных газов.
Максимальная скорость истечения в таких двигателях зависит от средней молекулярной массы истекающих газов, температуры и показателя адиабаты:
- w=2kk−1 RuTM{\displaystyle w={\sqrt {{\frac {2k}{k-1}}{\frac {\ R_{u}T}{M}}}}}
где w{\displaystyle w} — скорость истечения, k{\displaystyle k} — показатель адиабаты, Ru{\displaystyle R_{u}} — универсальная газовая постоянная, T{\displaystyle T} — температура, M{\displaystyle M} — молекулярная масса. Отсюда видно, что для достижения максимальной скорости нужно использовать газ с минимальной молекулярной массой (например, водород) и нагревать газ до высокой температуры. В электрической дуге газ можно нагреть до 15 000 К.
- ↑ Арбузов И. А., Рахманин В. Ф., Судаков В. С., Чванов В. К. Творческий путь академика В. П. Глушко (к 110 й годовщине со дня рождения) // Двигатель : журнал. — 2018. — Май-июнь (№ 3 (117)). — С. 34.
Обсуждение:Электрический двигатель — Википедия
Материал из Википедии — свободной энциклопедии
Уже удалял, только с другого адреса. незачем в Википедии заниматься рекламой компаний. Alex_Zet 18:50, 27 октября 2008 (UTC)
Но здесь и ни намёка на рекламную деятельность. Не понимаю причин вашего беспокойства. Статья хорошая. 94.241.45.77 15:48, 16 октября 2009 (UTC)
94.241.54.154 18:37, 27 октября 2009 (UTC)
выдвинул идею электрического двигателя и продемонстрировал «электрическое колесо», вращающееся под действием электростатических сил
???
Как это понимать???
http://ru.wikipedia.org/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D0%BA%D0%BB%D0%B8%D0%BD,_%D0%91%D0%B5%D0%BD%D0%B4%D0%B6%D0%B0%D0%BC%D0%B8%D0%BD#.D0.9B.D0.B8.D1.82.D0.B5.D1.80.D0.B0.D1.82.D1.83.D1.80.D0.B0
А здесь об этом в разделе ни слова!
Перенаправление на саму себя[править код]
Я, что то не понимаю. Почему при клике на Электродвигатель переменного тока я попадаю (перенаправляюсь) на статью Электрический двигатель. Получается, что все электрические двигатели это двигатели переменного тока. При этом есть ещё двигатели постоянного тока. Короче, какой то бардак. P.Fisxo 13:43, 15 августа 2014 (UTC)
- Исправил редирект — теперь ведёт на на раздел этой статьи. Qkowlew 13:36, 16 августа 2014 (UTC)
Прочел и предлагаю всё переписать с нуля[править код]
Написано просто ужасно. Никакой логики в изложении нет — почему сначала принцип действия (в котором нет принципа действия, а есть сумбурное описание устройства), что-то невнятное про какие-то «болгарки», из которых можно извлечь какой-то «электронный блок», описание какого-то асинхронного почему-то трехфазного двигателя, а позже — классификация, в которой уже говорится, что двигатели бывают синхронные и асинхронные… Что такое трехфазный — ну хоть ссылку дайте. Я уж не говорю про «короткозамкнутый»
Ну и перлы типа «Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм» — что, вот всегда непременно полмиллиметра, даже там где не метрическая система?
Статью писал тот, кто наверное умеет чинить электродвигатели и рассчитывать обмотки — отдайте её все же преподавателю с навыками системного мышления, который не будет постоянно прыгать между «двигатель» и «машина»
- А вот преподавателям ничего не стоит отдавать: пусть пишут те, кто непосредственно с этим работает, понимает и может объяснить как практик; преподаватели же в массе своей — это оторванные от практики и следственно понимания люди, зазубрившие по сути мнемонические правила ( постоянное развитие науки, отметание прежних суждений, появление новых однозначно говорит, что так называемые законы — это по сути просто мнемонические правила, а не истинное положение вещей ), неспособные объяснять и осознавать всю глубину своего незнания. Пусть преподаватели зазубренные формулы на доске пишут, а объясняют понимающие практики!
—2A00:6F60:2:1003:0:0:0:1 18:49, 29 ноября 2015 (UTC)[email protected]
- В википедии есть правило Правьте смело: ВП:СМЕЛО. Только, если не затруднит, зарегистрируйтесь и тогда с вами проще будет общаться, а вам обсуждать правки. —P.Fisxo 19:49, 29 ноября 2015 (UTC)
В статье отсутствуют данные о типичных и максимальных КПД электрических двигателей (в зависимости от мощности?) —VictorPorton (обс.) 02:48, 2 декабря 2017 (UTC)
Электрический привод — Википедия
Электрический привод (сокращённо — электропривод, ЭП) — управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[1] и главным источником механической энергии в промышленности.
В ГОСТ Р 50369-92 электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса[2].
Как видно из определения, исполнительный орган в состав привода не входит. Однако авторы авторитетных учебников[1][3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей, также учитываются при проектировании электропривода.
Электропривод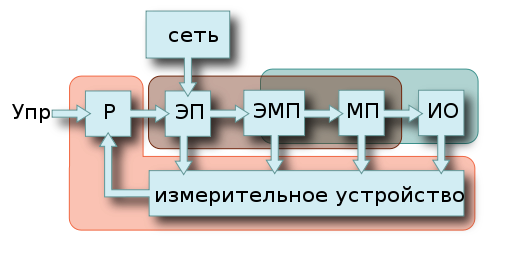
Функциональные элементы:
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя.
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть.
- Система управления электропривода[4].
Статические характеристики[править | править код]
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика[править | править код]
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя[править | править код]
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика[править | править код]
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
По количеству и связи исполнительных, рабочих органов:
Классификация электроприводов по степени их автоматизации рабочих машин и механизмов и качеству выполняемых операций- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Автоматизированные электроприводы подразделяются еще на две подгруппы — разомкнутые и замкнутые. Работа разомкнутого привода заключается в том, что все внешние возмущения (для электрических приводов самым характерным из них является момент нагрузки) оказывают влияние на выходную переменную электрического привода, как пример — на его скорость. Иными словами, разомкнутый электрический привод не изолирован от влияния внешних возмущений, все изменения которых отражаются на его рабочих показателях. В разомкнутом приводе по этой причине не может обеспечиться высокий уровень качества регулирования переменных, хотя данный привод отличается простой схемой.
Основным отличием замкнутых электрических приводов является их общее или локальное удаление воздействий внешних возмущений на управляемую переменную электрического привода. В качестве примера можно привести тот факт что, скорость таких электрических приводов может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутый привод обеспечивает более качественное управление движением исполнительных органов, хотя его схемы являются более сложными и требуют, зачастую, применения силовых преобразователей энергии.
Замкнутый электропривод[править | править код]
Структура замкнутых электроприводов: а — с компенсацией возмущения; б — с обратной связью.Замкнутый электрический привод может быть построен по принципам отклонения с использованием обратных связей или компенсации внешнего возмущения.
Принцип компенсации мы можем рассмотреть на примере компенсации наиболее явно выраженного внешнего возмущения электропривода — момента нагрузки Мс при регулировании его скорости (рис.а).Основным признаком такой замкнутой структуры электрического привода является наличие цепи, по которой на вход привода вместе с задающим сигналом скорости подается сигнал UM = kMMQ, пропорциональный моменту нагрузки Мс. В результате этого управление ЭП осуществляется суммарным сигналом ошибки, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою высокую эффективность, электрические приводы по данной схеме выполняются крайне редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).В связи с данным фактом подавляющее количество замкнутых структур электроприводов используют принцип обратной связи (отклонения). Он характеризуется тем что имеет цепь обратной связи, соединяющую выход электрического привода с его входом, отсюда и пошло название замкнутых схем.
Все виды применяемых в замкнутых электрических приводах обратных связей делятся на положительные и отрицательные, жесткие и гибкие, линейные и нелинейные.
Положительной называется обратная связь, в которой сигнал направлен согласно и складывается, с управляющим сигналом, в то время как сигнал отрицательной связи направлен в противоположную сторону (знак «минус» на рис. б).Жесткая обратная связь охарактеризована тем, что данная связь действует как в установившемся режиме, так и в переходном режиме электрического привода. Сигнал гибкой обратной связи производится только в переходных режимах электропривода и используется для обеспечения требуемого им качества, как пример устойчивости движения, допустимого перерегулирования и т.д.
Линейная обратная связь охарактеризована своей пропорциональной зависимостью между управляемой координатой и сигналом обратной свﮦязﮦи, в то время как при производстве нелинейной связи эта зависимость не будет пропорциональной.
Для регулирования движения исполнительных органов эксплуатируемых машин иногда требуется изменять несколько переменных электрического привода, например ток, момент и скорость. В таком случае замкнутые приводы создаются по одной из следующих структурных схем.
Электропривод с общим усилителем[править | править код]
Схема электропривода с общим усилителем.Схема с общим усилителем представлена на рисунке справа в качестве примера, данная схема является схемой регулирования двух переменных двигателя, где Д — скорости тока I. Схема содержит в себе силовой преобразователь электроэнергии П, устройство управления УУ, механическую передачу МП и датчики тока ДТ, скорости ДС и устройство токоограничения (токовой отсечки) УТО. Данная схема обеспечивает хорошую характеристику двигателя. На интервале скорости 0 — СOj за счет действия обратной связи по току (сигнал U) обеспечивается ограничение тока и момента двигателя и характеристика имеет близкий к вертикальному участок. При скорости Со > 00j узел УТО заканчивает действие связи по току и за счет наличия обратной связи по скорости (ОСС) (сигнал U ОCC) характеристика двигателя становится жестче ,что обеспечивает регулирование скорости.
Совокупность обратных связей, число которых может быть от двух и более, в схеме с единым усилителем образует своего рода модальный регулятор, а переменные при этом называются переменными состояния электропривода. Главной задачей модального регулятора можно считать обеспечение заданного качества динамических процессов в электроприводе — быстродействия, устойчивости и степени затухания переходных процессов. Это достигается выбором видов и соответствующим исследованием коэффициентов обратных связей по переменным электрического привода. Следует отметить, что система с суммирующим усилителем относится к системам управления с так называемой параллельной коррекцией.
Электропривод с наблюдающим устройством[править | править код]
Схема электропривода с наблюдающим устройствомВ сложных системах электроприводов, имеющих, в частных случаях, разветвленные кинематические цепи с упругими элементами, множество регулируемых переменных может оказаться весьма высоким. При данном факте измерение некоторых из них имеет некоторые затруднения по тем или иным причинам. В таких случаях прибегают к использованию так называемых наблюдающих устройств (наблюдателей).
Основную часть наблюдателя формируют совокупности моделей звеньев электрического привода, выполненных на основе операционных усилителей или элементов микропроцессорной техники. Выходные сигналы (напряжения) этих моделей, параметры которых соответствуют реально существующим звеньям электропривода, отображают близкие значения переменных.
Эксплуатация с применением наблюдателя на примере регулирования угла поворота вала двигателя поясняет структурная схема на рисунке 6, на которой приняты следующие обозначения: Д — двигатель, П — преобразователь, УУ — управляющее устройство, МП — механическая передача, НУ — наблюдающее устройство.
Электрический привод применяется для управления положением исполнительного органа φио. Это достигается соответствующим регулированием угла поворота φ вала двигателя, при котором необходимо также регулирование и других переменных — тока I, момента М и скорости двигателя.
Для применения рассматриваемого принципа управления, сигнал задания угла поворота фз подается на устройство управления УУ и одновременно на вход наблюдающего устройства НУ. Наблюдающее устройство НУ вырабатывает с помощью моделей звеньев привода сигналы, пропорциональные току, моменту и скорости, и направляет их устройству управления УУ.
Так же следует отметить, что модели звеньев не в состоянии учесть всех реальных возмущений, воздействующих на электрический привод и электрическую машину, и нестабильности параметров ЭП, НУ выдает в управляющее устройство не точные выражения переменных, а их оценки, что обозначено на схеме звездочкой «*».
Электропривод с подчиненной системой координат[править | править код]
Схема электропривода с подчиненным регулированием координатДля увеличения точности получаемых оценок переменных состояния может применяться корректирующая обратная связь по управляемой переменной, показанная выше штриховой линией. В данном случае значение выходной управляемой переменной ф сравнивают при помощи обратной связи с ее оценкой ф* и только затем в функции ошибки (выявленного отклонения) Дф корректируют показания отдельных моделей.
Структура с подчиненным управлением координат отличается тем, что в данной структуре регулирование каждой отдельной координаты осуществляется отдельными регуляторами — тока РТ и скорости PC, которые в свою очередь совместно с соответствующими обратными связями формируют замкнутые контуры. Они встраиваются таким образом, что входным, задающим сигналом для внутреннего контура тока U является выходной сигнал внешнего по отношению к нему контура скорости. Исходя из этого, внутренний контур тока зависит от внешнего контура скорости — основной управляемой координате электрического привода.
Главное достоинство схемы изображенной на рисунке заключается в возможности эффективной настройки управления каждой переменной как в статичном, так и в динамичном режимах, в силу чего она представляет из себя в настоящее время основу применение в электроприводе. Кроме того, зависимость контура тока от контура скорости позволяет простыми методами осуществлять ограничение тока и момента, для чего достаточно ограничить на соответствующем уровне сигнал на выходе регулятора скорости (он же — сигнал задания тока)
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
- ↑ 1 2 3 Ильинский Н. Ф. Основы электропривода: Учебное пособие для вузов. — 2-е изд., перераб. и доп. — М.: Издательство МЭИ, 2003. — С. 220. — ISBN 5-7046-0874-4.
- ↑ Электроприводы. Термины и определения.-М.- Издательство стандартов. −1993 [1]
- ↑ Онищенко Г.Б. Электрический привод. — М.: Академия, 2003.
- ↑ Анучин А.С. Системы управления электроприводов. — Москва: Издательский дом МЭИ, 2015. — 373 с. — ISBN 978-5-383-00918-5.
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — ISBN 5-7695-2306-9.
- Москаленко, В.В. Электрический привод. — 2-е изд. — М.: Академия, 2007. — ISBN 978-5-7695-2998-6.
- Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. Ленинград, Издательство «Энергоиздат», Ленинградское отделение, 1982
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода. — 6-е изд. — М.: Энергоиздат, 1981. — 576 с.
- Тищенко О. Ф. Элементы приборных устройств. — М.: Высшая школа, 1982. — 263 с.