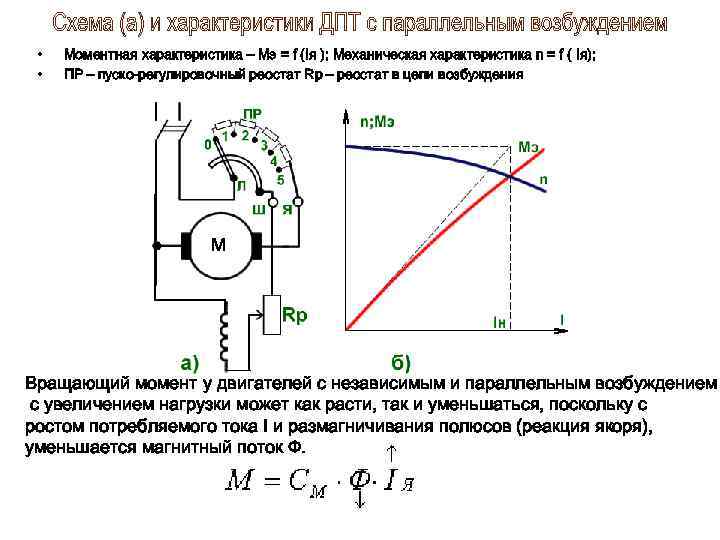
Двигатель постоянного тока с параллельным возбуждением
Существует несколько возможных разновидностей построения эл моторов, работающих от источника постоянного напряжения. Принцип их действия одинаков, а отличия заключаются в особенностях подключения обмотки возбуждения (ОВ) и якоря (Я).
Свое название эл двигатель постоянного тока с параллельным возбуждением получил потому, что его обмотка Я и ОВ соединяются друг с другом именно таким образом. Электродвигатель такой разновидности обеспечивает нужные режимы, превосходя изделия последовательного и смешанного типов тогда, когда требуется практически постоянная скорость его функционирования.
Построение двигателя и область его применения
Схема электродвигателя рассматриваемого типа изображена ниже.
- общий ток, потребляемый эл мотором от источника, составляет I = IЯ + IВ, где IЯ, IВ – токи через якорь, обмотку возбуждения, соответственно,
- одновременно IВ не зависит от IЯ, то есть не зависит от нагрузки.


Устройство применяется тогда, когда пуск не требует обеспечения высокого момента, то есть когда режимы эксплуатации приводных механизмов не предполагают создание больших стартовых нагрузок. Это типично для станков и вентиляторов.
Для практики ценны такие полезные тяговые параметры подобных эл механизмов как
- устойчивость работы при колебаниях нагрузки,
- высокая экономичность из-за того, что IЯ не протекает через ОВ.
Пуск при недостаточном моменте обеспечивается переходом на схему смешанного типа.
Поведение электромотора при изменении нагрузок
Механическая характеристика показывает устойчивость работы электромотора в широком диапазоне изменения нагрузок, описывая зависимость момента, создаваемого эл двигателем, от скорости функционирования вала.
Тяговые характеристики механизма рассматриваемого типа позволяют сохранить величину момента при значительных изменения количества оборотов. Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Говоря иными словами, для такого эл мотора характерна жесткая характеристика. Такой характер работы считается важным преимуществом агрегата рассматриваемого типа.
Разновидности подходов к регулированию частоты вращения
Принцип действия параллельного включения обмоток обеспечивает плавный пуск в сочетании с большим диапазоном изменения оборотов в процессе работы с помощью реостатов. Они же обеспечивают нормальный пуск двигателя ограничением тока.
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.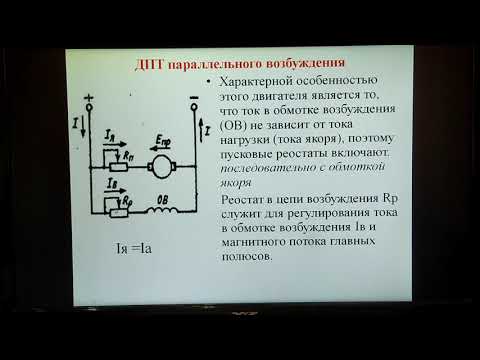
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования.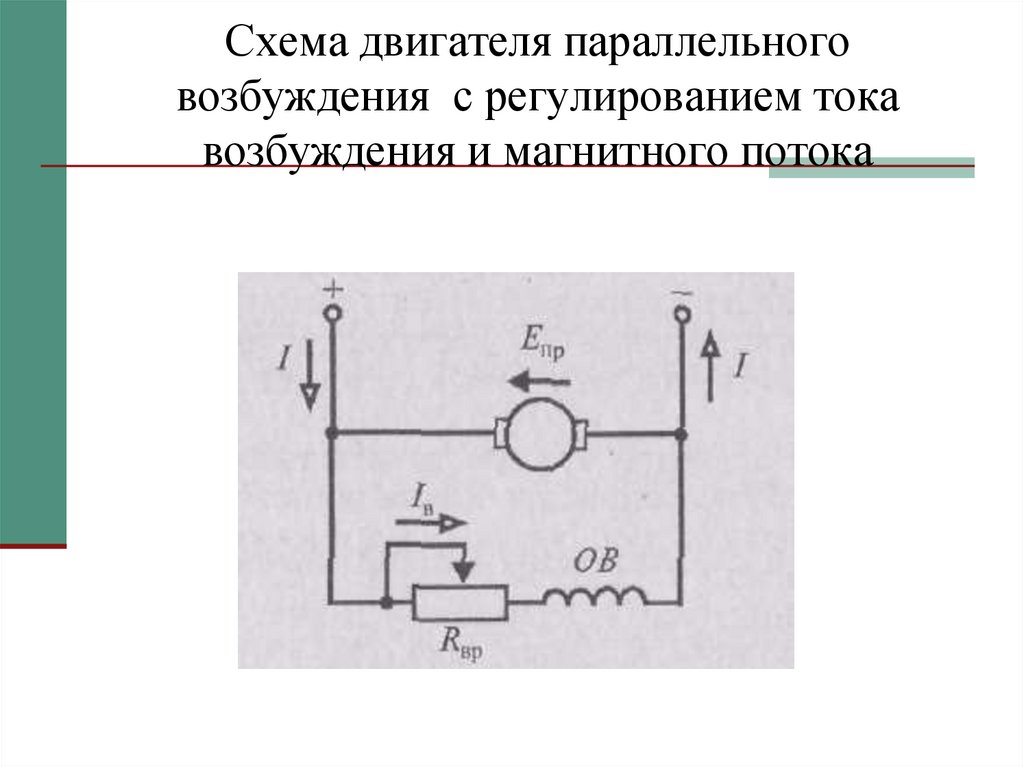 В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.
Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.

В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Заключение
Двигатель с параллельным возбуждением является очень гибким приводным механизмом и может использоваться в очень большом количестве областей там, где не требуются большие моменты при старте. Имеет несложные и надежные цепи регулирования скорости вращения, отличается простотой запуска.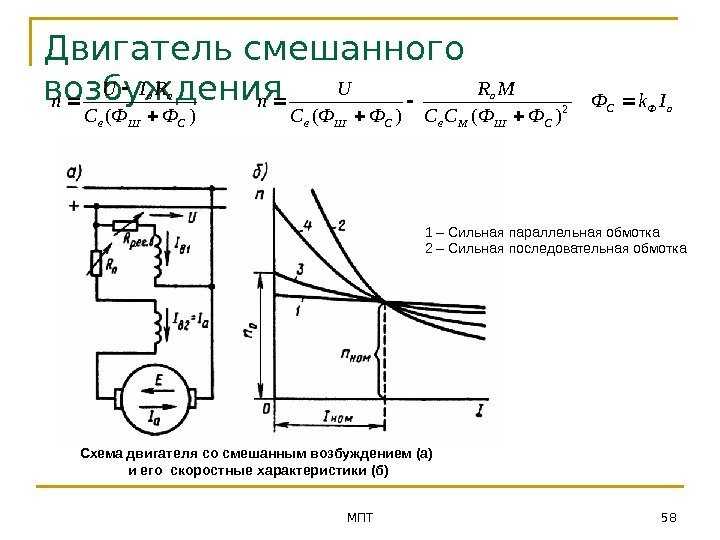
Двигатели параллельного возбуждения | Электротехника
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв –ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
n = nх – bМ, (1.8)
где b = Rя/СЕФ.
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя ~ М.
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв имагнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
Формула (1.6) при этом принимает вид:
n = ,
(1.9)
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I) в регулировочном реостате, по которому протекает весь ток якоря.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическоеторможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx(n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc(где Uc– напряжение сети) и ток двигателя изменяет свой знак (1. 4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис.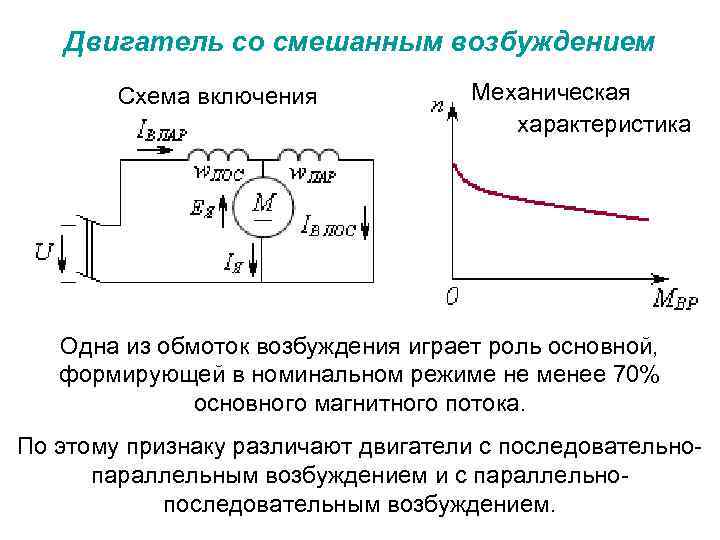 1.30).
1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n =
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.
Классификация двигателей или генераторов машин постоянного тока с самовозбуждением
27 апреля • Общие • 18500 просмотров • 3 комментария к Классификации двигателей или генераторов машин постоянного тока с самовозбуждением
создается и не разрушается, но может быть преобразовано из одной формы в другую» — таков фундаментальный закон мироздания.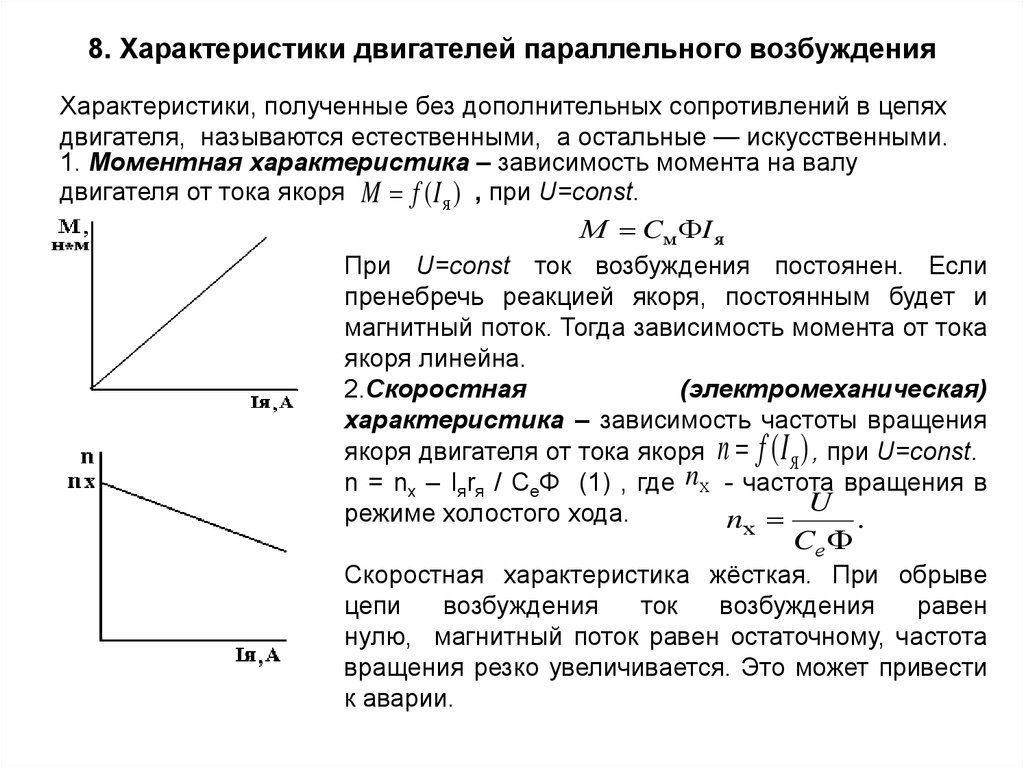 Машина постоянного тока преобразует электрическую энергию в механическую (двигатель) или наоборот (генератор). Принцип работы в обоих случаях остается одинаковым. Двигатель постоянного тока находит свое применение в области техники и технологий, начиная от электробритвы и заканчивая деталями автомобилей, во всех автомобилях малого и среднего размера.
Машина постоянного тока преобразует электрическую энергию в механическую (двигатель) или наоборот (генератор). Принцип работы в обоих случаях остается одинаковым. Двигатель постоянного тока находит свое применение в области техники и технологий, начиная от электробритвы и заканчивая деталями автомобилей, во всех автомобилях малого и среднего размера.
КЛАССИФИКАЦИЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Таблица классификации двигателей постоянного тока
1. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ОТДЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ОТДЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
В этом случае питание подается отдельно на обмотку возбуждения и обмотку якоря. Основным отличием этих типов двигателей постоянного тока является то, что ток якоря не протекает через обмотку возбуждения, поскольку обмотка возбуждения возбуждается от внешнего источника постоянного тока, как показано на рисунке рядом.
2. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМ МАГНИТОМ
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМ МАГНИТОМ
Он имеет обычную обмотку якоря, как и другие двигатели, но обмотка возбуждения не обязательно присутствует. В этом радиально намагниченные постоянные магниты установлены на внутренней периферии сердечника статора для создания необходимого магнитного поля. Однако ротор имеет обычный якорь постоянного тока с сегментами коммутатора и щетками. Приведено схематическое изображение двигателя постоянного тока с постоянными магнитами.
В этом радиально намагниченные постоянные магниты установлены на внутренней периферии сердечника статора для создания необходимого магнитного поля. Однако ротор имеет обычный якорь постоянного тока с сегментами коммутатора и щетками. Приведено схематическое изображение двигателя постоянного тока с постоянными магнитами.
3. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С САМОВОЗБУЖДЕНИЕМ
В этом случае шунтирующая обмотка частично или полностью соединена последовательно или параллельно с обмоткой якоря, поэтому ее можно подразделить на:
a. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ШУНТНОЙ ОБВЯЗКОЙ
В этом случае обмотка возбуждения подвергается воздействию всего терминального напряжения, поскольку она подключена параллельно обмотке якоря, как показано на рисунке. двигатель с постоянной скоростью, так как здесь скорость не меняется при изменении механической нагрузки на выходе. Он относится к категории двигателей постоянного тока с самовозбуждением.
б. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ПОСЛЕДОВАТЕЛЬНОЙ ОБМОТКОЙ С САМОВОЗБУЖДЕНИЕМ
С ПОСЛЕДОВАТЕЛЬНОЙ ОБМОТКОЙ
В этом случае весь ток якоря протекает через обмотку возбуждения, так как она последовательно соединена с обмоткой якоря. Двигатель постоянного тока с последовательным возбуждением схематически представлен для лучшего понимания. В двигателе постоянного тока с последовательным возбуждением скорость зависит от нагрузки. И с точки зрения эксплуатации это его главное отличие от двигателя постоянного тока с параллельным возбуждением.
в. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С СОВМЕСТНЫМ ОБМОТКОМ
ТИП С СОВМЕСТНЫМ ВОЗБУЖДЕНИЕМ С САМОВОЗБУЖДЕНИЕМ
Характеристика сложного возбуждения в двигателе постоянного тока получается путем объединения рабочих характеристик как двигателя постоянного тока с параллельным возбуждением, так и двигателя постоянного тока с последовательным возбуждением. Двигатель постоянного тока со смешанной обмоткой с самовозбуждением или просто двигатель постоянного тока со сложной обмоткой содержит обмотку возбуждения, соединенную как последовательно, так и параллельно с обмоткой якоря. Возбуждение двигателя постоянного тока с составной обмоткой может быть двух типов в зависимости от характера соединения.
Возбуждение двигателя постоянного тока с составной обмоткой может быть двух типов в зависимости от характера соединения.
Двигатель постоянного тока с накопительным составом, , в котором поток шунтирующего поля усиливает поток основного поля, создаваемого основным полем, включенным последовательно с обмоткой якоря. φобщий = φсерийный + φшунт.
Дифференциальный составной двигатель постоянного тока, , в котором расположение параллельной и последовательной обмотки таково, что поток возбуждения, создаваемый параллельной обмоткой возбуждения, уменьшает влияние потока от основной последовательной обмотки возбуждения. Чистый поток, создаваемый в этом случае, составляет меньше исходного потока и, следовательно, не находит большого практического применения. φобщ = φсерия – φшунт
Как накопительный, так и дифференциальный комбинированный двигатель постоянного тока могут быть короткошунтового или длинношунтового типа в зависимости от характера устройства.
Двигатель постоянного тока с коротким шунтом
Двигатель постоянного тока с коротким шунтом
Если обмотка шунтирующего возбуждения параллельна только обмотке якоря, а не последовательной обмотке возбуждения, то такой двигатель называется двигателем постоянного тока с коротким шунтом или короткошунтирующим двигателем постоянного тока с составной обмоткой. мотор. Шунт — это, по сути, плечо, соединенное параллельно, поэтому это двигатель постоянного тока с коротким шунтом. Шунтирующий двигатель постоянного тока используется в устройствах, где важно регулирование скорости. Его основное применение в центробежных насосах, так как они производят постоянный поток и
Двигатель постоянного тока с длинным шунтом
Двигатель постоянного тока с длинным шунтом
Если обмотка шунтирующего возбуждения параллельна как обмотке якоря, так и последовательной обмотке возбуждения, то такой двигатель называется двигателем постоянного тока с длинным шунтом или просто двигателем постоянного тока с длинным шунтом. .
.
Q1. Что такое самовозбуждение в случае машины постоянного тока?
Ответ. Процесс создания магнитного поля с помощью электрического тока называется возбуждением. Современные генераторы с катушками возбуждения имеют самовозбуждение, при этом часть выходной мощности ротора используется для питания катушек возбуждения.
Q2. В чем основное функциональное различие между машиной постоянного тока с автошунтом и последовательной обмоткой?
Ответ. Двигатель с шунтовой обмоткой — это двигатель с постоянной скоростью, в котором скорость не зависит от механической выходной мощности, но в случае машины с последовательной обмоткой скорость зависит от подключенной выходной нагрузки.
Ссылки по теме:
- Серводвигатель постоянного и переменного тока и шаговый двигатель
- Принцип работы трехфазного асинхронного двигателя
- Реактивные реактивные двигатели и работа бесщеточных двигателей постоянного тока
Посетите Технические примечания , чтобы узнать о дополнительных темах.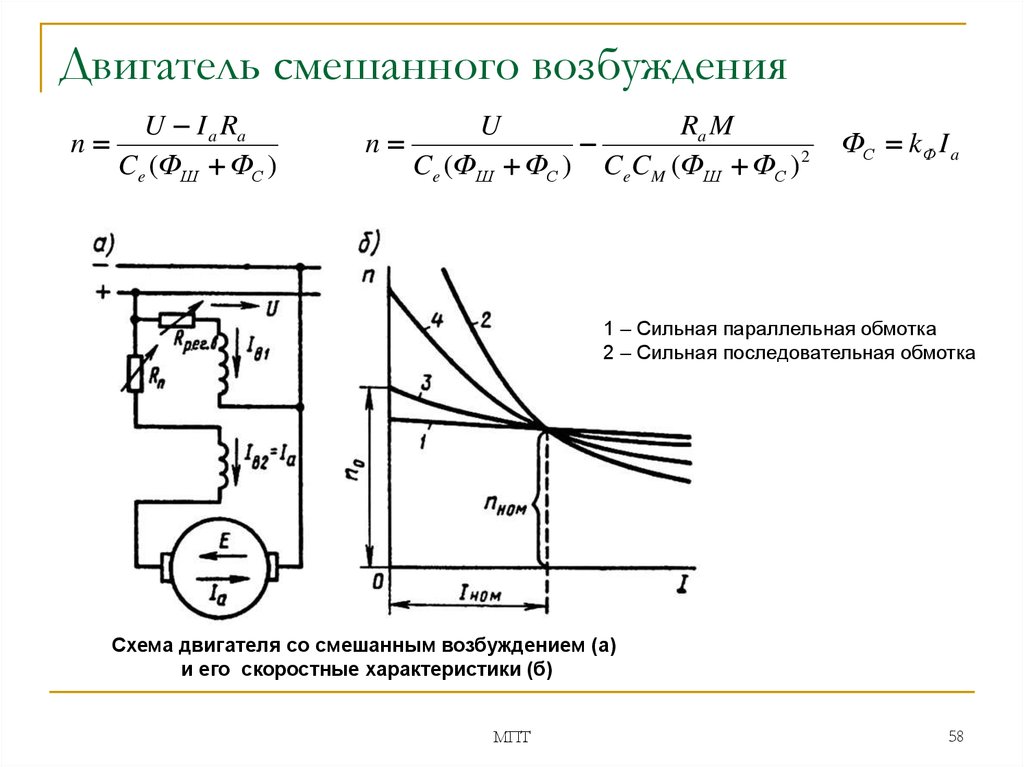
Ваши ценные мысли всегда приветствуются для дальнейшего улучшения.
основные вопросы по электронике заметки о машинах постоянного тока классификация двигателей постоянного тока двигатели постоянного тока с независимым возбуждением типы машин постоянного тока
Об авторе: Payal Das
Привет, это Payal Das работает в Ruva Customer Services Pvt. Ltd. в качестве консультанта по ИТ-продвижению. Я получил степень бакалавра технических наук в области ИТ в Koustuv Group of Institution, BBSR и интересуюсь ведением блога.
« ЗАКОНЫ ЭЛЕКТРОМАГНИТИЗМА Теорема Тевенина »
Шунтирующий двигатель постоянного тока — поскольку они соединены параллельно, обмотки якоря и возбуждения открыты
также известный как двигатель постоянного тока с параллельной обмоткой) представляет собой тип двигатель постоянного тока с самовозбуждением, обмотки возбуждения которого шунтированы или параллельно обмотке якоря двигателя. Так как они при параллельном соединении обмотки якоря и возбуждения подвергаются одинаковое напряжение питания. Хотя есть отдельные ветки для потока
ток якоря и ток возбуждения – как показано на рисунке ниже.
Хотя есть отдельные ветки для потока
ток якоря и ток возбуждения – как показано на рисунке ниже.Уравнения двигателя шунта постоянного тока
Теперь рассмотрим напряжение и ток, подаваемые от электрическая клемма к двигателю обозначается буквами E и Itotal соответственно.
Этот ток питания в случае двигателя постоянного тока с параллельной обмоткой разделен на 2 части. Я, протекающий через якорную обмотку сопротивления Ра и протекающий через поле обмотка сопротивления Rш. Напряжение на обеих обмотках остается одинаковым. Оттуда мы можем написать
Таким образом, мы подставляем это значение тока якоря Ia, чтобы получить общее уравнение напряжения постоянного тока. Шунтирующий двигатель .
На практике, когда двигатель находится в рабочем состоянии, а напряжение питания постоянно, а ток возбуждения шунта определяется выражением
Но мы знаем Ish ∝ Φ
я. поток поля Φ пропорционален току поля Ish
Таким образом, поток поля остается более или менее постоянным, и по этой причине шунт 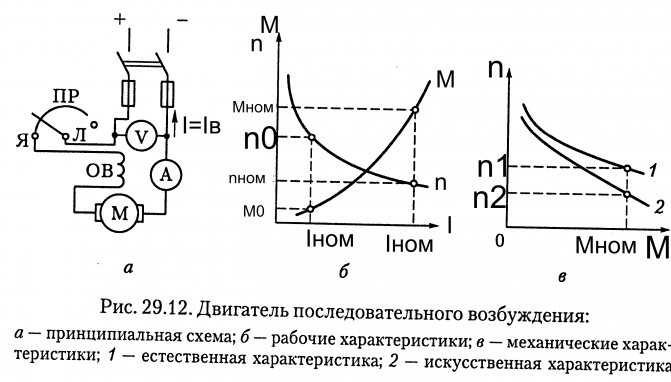 Вы можете узнать больше о
двигатели постоянного тока, изучив нашу коллекцию из более чем 1000 вопросов по электрике.
Вы можете узнать больше о
двигатели постоянного тока, изучив нашу коллекцию из более чем 1000 вопросов по электрике.
Конструкция шунтирующего двигателя постоянного тока
Конструкция шунтирующего двигателя постоянного тока очень похожа на другие типы двигателей постоянного тока. двигателя, как показано на рисунке ниже.
клеммы ротора. По существу это означает, что при переключении двигателя рабочее состояние от холостого хода до загруженного, на удивление нет значительное изменение скорости бега, как и следовало ожидать при отсутствии любых модификаций регулирования скорости извне. Давайте посмотрим, как? Давайте проведем пошаговый анализ, чтобы понять это лучше.
- Первоначально предполагалось, что двигатель работает без нагрузки или с небольшой нагрузкой. нагруженном состоянии при скорости N об/мин.
- При добавлении нагрузки на вал двигатель сначала замедляется, но здесь на сцену выходит концепция саморегулирования.
- В самом начале подачи нагрузки на двигатель постоянного тока с параллельным возбуждением ,
скорость однозначно снижается, а вместе со скоростью и снижается
 Поскольку Eb ∝ N, определяемое как
Поскольку Eb ∝ N, определяемое какЭто можно пояснить графически ниже.
- Это уменьшение противо-ЭДС или противо-ЭДС Eb приводит к увеличение сетевого напряжения. Поскольку сетевое напряжение Enet = E − Eb. С момента поставки напряжение E остается постоянным.
- В результате этого увеличенного значения сетевого напряжения ток якоря увеличивается и, следовательно, увеличивается крутящий момент. Так как Ia ∝ Τ, заданное
График изменения тока якоря и крутящего момента при питании нагрузки ниже.
- Это увеличение крутящего момента увеличивает скорость и, следовательно, компенсация потери скорости при загрузке. Таким образом, конечная скоростная характеристика Шунтирующий двигатель постоянного тока, похоже.
Отсюда мы можем хорошо понять эту особую способность шунтирующей раны Двигатель постоянного тока самостоятельно регулирует скорость при нагрузке и, таким образом, правильно
называется двигателем с постоянным потоком или постоянной скоростью. Из-за чего находит
широко распространенное промышленное применение, где всегда требуется работа с постоянной скоростью
обязательный.
Из-за чего находит
широко распространенное промышленное применение, где всегда требуется работа с постоянной скоростью
обязательный.
Ø Удлинительный провод Ø Соединительные провода Ø Тахометр Ø двигателя D
ПРОЦЕДУРА:
Подключите цепь, как показано на схеме. Проверьте, правильно ли подключены все соединения. Включите двигатель и измерьте начальное напряжение 15 В в качестве источника напряжения. Учитывая напряжение, получить следующие параметры, как показано в таблице. Сведите результаты в таблицу. Измерьте скорость двигателя с помощью тахометра. Увеличьте напряжение источника на 5В и повторите процедуры (3-5). Продолжайте до тех пор, пока источник напряжения не будет отрегулирован примерно до 90В. В конце этого процесса измерьте сопротивление якоря, последовательное и полевое сопротивления. двигателя. Используя полученные значения, вычислите необходимые данные в таблице.
НАБЛЮДЕНИЕ:
Двигатель постоянного тока с параллельным возбуждением имеет уменьшающийся крутящий момент при увеличении скорости. уменьшение крутящего момента в зависимости от скорости вызвано падением напряжения на сопротивлении якоря
и реакция якоря. При значении скорости, близкой к 2-кратной номинальной скорости,
реакция якоря становится чрезмерной, вызывая быстрое уменьшение потока поля,
и быстрое снижение крутящего момента до тех пор, пока не будет достигнуто состояние остановки.
Применение двигателей с параллельным возбуждением
Характеристики двигателя с параллельным возбуждением дают ему очень хорошую скорость.
регулирования, и он классифицируется как двигатель с постоянной скоростью, хотя
скорость немного снижается при увеличении нагрузки. Двигатели с параллельным возбуждением
используется в промышленности и автомобилестроении, где требуется точный контроль скорости
и крутящий момент обязательны.
уменьшение крутящего момента в зависимости от скорости вызвано падением напряжения на сопротивлении якоря
и реакция якоря. При значении скорости, близкой к 2-кратной номинальной скорости,
реакция якоря становится чрезмерной, вызывая быстрое уменьшение потока поля,
и быстрое снижение крутящего момента до тех пор, пока не будет достигнуто состояние остановки.
Применение двигателей с параллельным возбуждением
Характеристики двигателя с параллельным возбуждением дают ему очень хорошую скорость.
регулирования, и он классифицируется как двигатель с постоянной скоростью, хотя
скорость немного снижается при увеличении нагрузки. Двигатели с параллельным возбуждением
используется в промышленности и автомобилестроении, где требуется точный контроль скорости
и крутящий момент обязательны.
ВЫВОД:
Шунтовой двигатель имеет несколько иные рабочие характеристики, чем серийный
мотор. Поскольку катушка шунтирующего поля изготовлена из тонкой проволоки, она не может создавать
большой ток для запуска, как поле серии.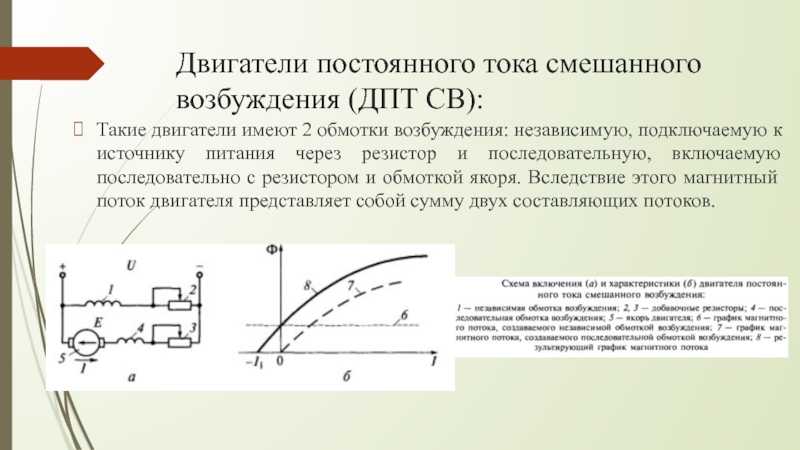 Это означает, что шунтирующий двигатель
имеет очень низкий пусковой момент, что требует, чтобы нагрузка на вал была
Это означает, что шунтирующий двигатель
имеет очень низкий пусковой момент, что требует, чтобы нагрузка на вал была
небольшой. Скоростью шунтирующего двигателя можно управлять. Способность двигателя к поддерживать заданное число оборотов на высокой скорости при изменении нагрузки из-за характеристика шунтирующего поля и якоря. Поскольку арматура начинает производить обратную ЭДС, как только он начнет вращаться, он будет использовать обратную ЭДС для поддерживать обороты на высокой скорости. Если нагрузка немного увеличивается и вызывает вал якоря замедляется, меньше будет создаваться противо-ЭДС. Это будет позволяют разнице между противо-ЭДС и приложенным напряжением стать больше, что приведет к большему течению тока. Дополнительный ток обеспечивает двигатель с дополнительным крутящим моментом, необходимым для восстановления его оборотов, когда эта нагрузка немного увеличился.
Скорость вращения шунтирующего двигателя также можно контролировать, регулируя напряжение, которое
применяется к якорю двигателя.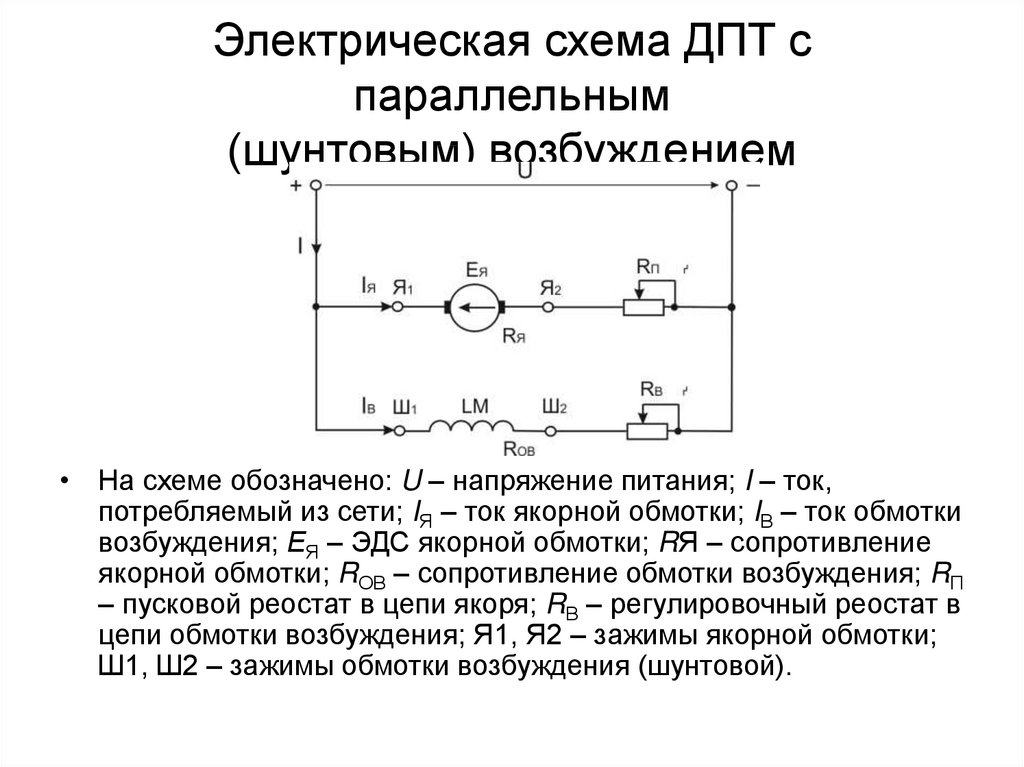 Это означает, что если двигатель работает на
при меньшем напряжении, чем указано на паспортной табличке, он будет работать не на полной мощности.
об/мин. Вы должны помнить, что КПД шунтового двигателя падает.
резко, когда он работает ниже номинального напряжения. Мотор будет стремиться
перегреваться при работе ниже полного напряжения, поэтому необходимо обеспечить вентиляцию двигателя.
предоставлена. Вы также должны знать, что крутящий момент двигателя уменьшается, когда он
работает ниже полного уровня напряжения.
Это означает, что если двигатель работает на
при меньшем напряжении, чем указано на паспортной табличке, он будет работать не на полной мощности.
об/мин. Вы должны помнить, что КПД шунтового двигателя падает.
резко, когда он работает ниже номинального напряжения. Мотор будет стремиться
перегреваться при работе ниже полного напряжения, поэтому необходимо обеспечить вентиляцию двигателя.
предоставлена. Вы также должны знать, что крутящий момент двигателя уменьшается, когда он
работает ниже полного уровня напряжения.
ВОПРОС И ОТВЕТ:
Каковы основные характеристики шунтового двигателя?
Шунтовой двигатель имеет четыре основные характеристики: крутящий момент, ток, скорость и эффективность. Они показаны на кривой производительности.
Шунтовой двигатель имеет более низкий пусковой момент, значит ли это, что он настолько не способен запускать большие нагрузки?
По сравнению с другими двигателями, шунтирующий двигатель имеет более низкую
пусковой момент.