
Пуск и тормозные режимы двигателя постоянного тока независимого возбуждения ДПТ НВ
Ответственным моментом при эксплуатации двигателей постоянного тока является их пуск. При включении двигателя в сеть в начальный момент ток в цепи якоря ограничивается лишь электрическим сопротивлением цепи якоря, так как в неподвижном якоре ЭДС не индуцируется. Поэтому начальный пусковой ток при непосредственном включении двигателя в сеть может достигать опасных значений, способных нарушить работу щеточно- коллекторного узла и вызвать «круговой огонь» на коллекторе. Кроме того, такой ток создаст чрезмерно большой пусковой момент, оказывающий на вращающиеся части электропривода ударное воздействие, способное вызвать их механическое разрушение.Эффективным средством ограничения пускового тока в двигателях постоянного тока является применение пусковых реостатов. Существует два метода расчета пусковых реостатов: графический и аналитический.
Графический метод расчета пусковых реостатов
В основе графического метода лежит пусковая диаграмма двигателя. Пусковая диаграмма, представленная на рис. 13.14, совмещена с трехступенчатым пусковым реостатом; K1, К2 и КЗ являются контактами силовых контакторов, посредством которых осуществляется переключение ступеней реостата, а rдоб1, rдоб2 и rдоб3 — резисторы ступеней пускового реостата. Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
I1 = (1,5…2,5)Iaном
I2 = (1,0…1,3)Iaном
при этом ток переключений I2 должен быть не меньше тока нагрузки, соответствующего статическому моменту сопротивления нагрузки МС, на вал двигателя. Для двигателей специального назначения, с тяжелыми условиями работы, например двигателей краново-металлургических серий, указанные значения токов могут быть увеличены.

Аналитический метод расчета пусковых реостатов
При аналитическом методе расчет сопротивлений резисторов пускового реостата ведут по формулам:

В этих выражениях λ = I1/I2 представляет собой отношение начального пускового тока I1 к току переключений I2. При работе двигателя от регулируемого преобразователя напряжения необходимость в пусковом реостате отпадает, так как пуск двигателя можно начинать с любого пониженного значения напряжения на обмотке якоря в соответствии с допустимым значением начального пускового тока.
Тормозные режимы двигателей постоянного тока независимого возбуждения дпт нв
Помимо основного (двигательного) режима работы в двигателях постоянного тока независимого (параллельного) возбуждения возможны тормозные режимы.

Генераторное рекуперативное торможение
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n0.
В этих условиях ЭДС машины Еа = сеФn0 превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n0.
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т.е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:

При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n0. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n0. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
Динамическое торможение.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении

В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа

т.е. станет отрицательным. В результате электромагнитный момент также
изменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
Торможение противовключением.
Допустим, что двигатель работает в основном (двигательном) режиме с номинальной нагрузкой. При отключении двигатели от сети вращающий
момент М = 0, но якорь двигателя за счет кинетической энергии вращающихся масс электропривода некоторое время будет продолжать вращение, т.е. произойдет выбег двигателя.
Чтобы уменьшить время выбега двигателя, применяют торможение противовключением. С этой целью изменяют полярность напряжения на клеммах обмотки якоря (полярность клемм обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (- U). Но якорь двигателя под действием кинетической энергии вращающихся масс электропривода сохраняет прежнее (положительное) направление вращения, и так как направление магнитного потока не изменилось, то ЭДС якоря Еа также не меняет своего направления и действует согласно напряжению (-U), при этом ток якоря создается суммой напряжения сети U и ЭДС якоря Еа
(рис. 13.15, в):

где rт, — сопротивление резистора в цепи якоря двигателя.
В этих условиях электромагнитный момент станет отрицательным.
Под действием тормозящего момента — Mт, частота вращения якоря уменьшается, достигнув нулевого значения.Если в этот момент цепь якоря не отключить от сети, то произойдет реверсирование двигателя и его якорь под действием момента, который прежде был тормозным, начнет вращение в противоположную сторону. При этом двигатель перейдет в двигательный (основной) режим с отрицательными значениями частоты вращения и вращающего момента. Во избежание нежелательного реверсирования операцию торможения противовключением автоматизируют, чтобы при нулевом значении частоты вращения цепь якоря отключалась от сети.
Возбуждение двигателя постоянного тока
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.

ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.

ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.

ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.

Похожие публикации
Что такое возбуждение в двигателях постоянного тока
Доброго времени суток, дорогие читатели!
В этой статье я расскажу о том, что такое возбуждение в двигателях постоянного тока и «с чем его едят».
Наверное, каждый из нас в детстве имел игрушки с электроприводом. Те же, кто в те годы отличался любопытностью, не упустили возможность разобрать эти игрушки, дабы посмотреть, а что там внутри.
Заглянув внутрь такой игрушки, нами был найден маленький электромоторчик постоянного тока. Естественно, тогда мы и не задумывались над тем, почему он работает. Некоторые из нас, найдя в игрушке моторчик, решались разобрать и его. Вот эти-то любопытные товарищи, разобрав моторчик, находили там постоянный магнит (иногда не один), щетки и якорь с коллектором.
Что такое возбуждение в двигателях постоянного тока
Так вот, как раз постоянный магнит и является простейшей системой возбуждения для моторов постоянного тока. Ведь якорь моторчика вращается только тогда, когда вокруг него присутствует постоянное магнитное поле, которое и создается при помощи постоянного магнита.
Двигатели постоянного тока промышленных масштабов в качестве возбудителей используют специальные обмотки, именуемые обмотками возбуждения.
Подключение же этих обмоток может быть самым различным. Они могут включаться параллельно якорю, последовательно с ним, смешано и, даже, независимо от них.
Кстати, моторчики, имеющие в качестве возбудителя постоянный магнит, считаются устройствами с независимым возбуждением.
Возбуждающая обмотка состоит из значительно большего числа витков, нежели якорная. В связи с этим ток якорной обмотки в десятки раз превосходит ток возбуждающей. Скорость вращения такого движка может меняться в зависимости от нагрузки и магнитного потока. Благодаря свойствам подключения, движки параллельного включения довольно мало подвержены перемене частоты вращения.
Теперь рассмотрим вариант раздельного подключения рабочей и возбуждающей обмоток. Такой движок именуется мотором с независимым возбуждением.
Скорость такого движка может регулироваться при помощи смены сопротивления якорной цепи, или магнитного потока.
Тут есть небольшой нюансик: не стоит слишком уменьшать ток возбуждения при таком включении двигателя, поскольку это чревато очень большим подъемом якорного тока. Тем же самым опасен и обрыв цепи возбуждения этих двигателей. Кроме того, если нагрузка мотора с таким включением мала, либо при его включении на холостой ход может произойти такой сильный его разгон, что возникнет опасность для движка.
Как я уже говорил, разновидностью ДПТ независимого возбуждения считаются устройства, имеющие в качестве возбудителя постоянные магниты. Скажу несколько слов и о них.
Поскольку ДПТ и машины синхронного типа могут использовать вместо возбудителей постоянные магниты, то подобный вариант считается достаточно привлекательным. И вот почему:
- у такого устройства снижено потребления тока за счет уменьшения числа обмоток, в результате чего такие показатели подобных машин, как КПД оказываются выше.
- С использованием вместо возбудителя постоянных магнитов упрощается конструкция возбуждающих цепей движка, что повышает его надежность, ведь постоянный магнит не требует питания, следовательно у такого мотора нет токосъемного узла на роторе.
Теперь о последовательном включении обмоток (двигатели с последовательным возбуждением).
В этом варианте подключения якорный ток будет являться и возбуждающим. Это становится причиной изменения магнитного потока в сильной зависимости от нагрузки. Это является причиной большой нежелательности пуска их на холостом ходу и при маленькой нагрузке.
Применение же такое включение нашло там, где требуется значительный момент пуска, либо возможность выдерживания кратковременных перегрузок. В связи с этим их применяют, как средства тяги для трамваев, троллейбусов, электровозов, метро и подъемных кранов. Кроме того, их применяют, как средство запуска для ДВС (в качестве стартеров).
Последним вариантом включения движков постоянного тока считается их смешанное включение.
Каждый из полюсов этих моторов оснащен парой обмоток, одна из которых параллельная, а другая – последовательная. Подключать их возможно двумя способами:
- Согласный метод (в этом случае токи складываются)
- Встречный вариант (вычитание токов)
Соответственно, в зависимости от варианта подключения (от чего меняется и соотношение магнитных потоков) такой мотор может оказаться приближен либо к устройству, имеющему последовательное возбуждение, либо к движку с параллельным возбудом.
В большинстве случаев основной обмоткой у них считают последовательную обмотку, а параллельную – вспомогательной. За счет параллельной обмотки у таких моторов скорость при небольших нагрузках, практически не растет.
Если требуется получение значительного момента при пуске и возможность регулирования скорости на переменных нагрузках, используется подключение согласного типа. Встречное же подключение используется при необходимости получения постоянной скорости при изменяющейся нагрузке.
Если возникает необходимость реверсирования ДПТ (смены направления его вращения), то меняют направление тока в одной из его рабочих обмоток.
Методом смены полярности подключения клемм двигателя возможно поменять направление только тех моторов, которые включены по независимой схеме, либо движков с постоянным магнитом в качестве возбудителя. Во всех иных устройствах необходима смена направления тока в одной из рабочих обмоток.
Кроме того, движки постоянного тока нельзя включать методом подключения полного напряжения. Это связано с тем, что величина их пускового тока, примерно в 2 десятка раз выше номинального (это зависит от размеров и скорости двигателя). Токи пуска движков больших размеров могут и в полсотни раз превосходить их номинальный рабочий ток.
Токи больших величин способны вызвать эффект кругового искрения коллектора, в результате чего коллектор разрушается.
Чтобы выполнить включение ДПТ, используется методика плавного включения, либо применение пусковых реостатов. Включение прямого типа возможно лишь на небольших напряжениях и для маленьких движков, имеющих большое сопротивление якорной обмотки.
Пишите комментарии, дополнения к статье, может я что-то пропустил.
Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Всего доброго.
Короткая заметка:Без встраиваемых светодиодных потолочных светильников, вы не добьетесь оригинального светового дизайна на кухне. Перейдя по ссылке, вы сможете узнать, как просто, можно организовать интерьер света.
- Печать
- по электронной почте
Устройство и принцип действия ДПТ
Исследование двигателя постоянного тока независимого возбуждения
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.

Рис. 1. Внешний вид двигателя постоянного тока
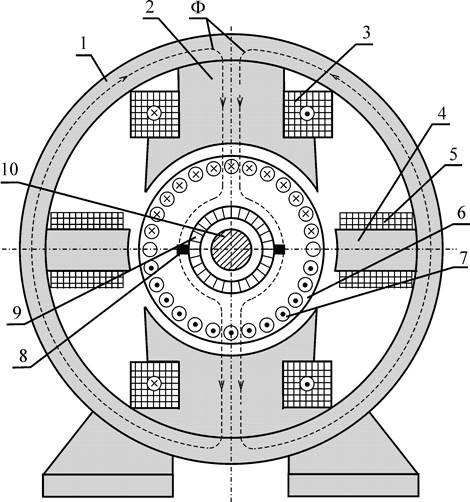
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями  и
и  . Как правило,
. Как правило,  . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
. В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением  . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
. Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
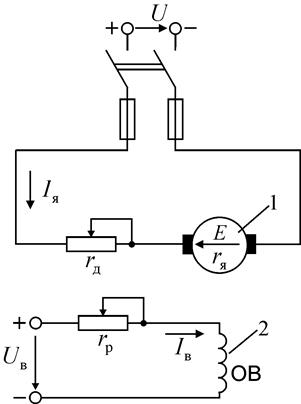
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
 , (1)
, (1)
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
 (2)
(2)
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
 (3)
(3)
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов  и
и  скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока
скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока  и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря  , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
, как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
 (4)
(4)
Значение сопротивления  относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя
относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя  . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
. Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Дата добавления: 2016-06-29; просмотров: 7895;
Похожие статьи:
2.2. Двигатель постоянного тока независимого возбуждения (дпт-нв)
Обмотки возбуждения и якоря этого двигателя питаются от разных источников (рис. 2.3,а). Где UB и IB – напряжение источника питания и ток обмотки возбуждения; U и IЯ – напряжение источника питания и ток якоря. Функцию обмотки возбуждения у таких двигателей может выполнять и постоянный магнит (рис. 2.3,б).
Д ля
двигателя с независимым возбуждением
величинаСМ Ф = const,
поэтому вид электромеханической и
механической характеристики в соответствии
с (2.4) и (2.5) будет один и тот же (рис. 2.3).
ля
двигателя с независимым возбуждением
величинаСМ Ф = const,
поэтому вид электромеханической и
механической характеристики в соответствии
с (2.4) и (2.5) будет один и тот же (рис. 2.3).
Характерные точки характеристик
1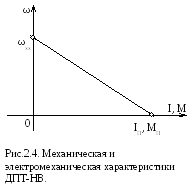 .
ПриIЯ = 0 и М
= 0; ω
= ωхх (ωхх – скорость
холостого хода двигателя). В режиме
холостого хода механическая нагрузка
на валу двигателя отсутствует.
.
ПриIЯ = 0 и М
= 0; ω
= ωхх (ωхх – скорость
холостого хода двигателя). В режиме
холостого хода механическая нагрузка
на валу двигателя отсутствует.
2. При ω = 0; IЯ = IП и М = МП (IП и МП – пусковой ток и пусковой момент двигателя). В литературе их иногда называют как IКЗ и МКЗ (током и моментом короткого замыкания), т.к. режим короткого замыкания для электродвигателя соответствует неподвижному состоянию якоря, а не замыканию его электрических цепей между собой или на корпус.
2.2.1. Регулирование частоты вращения двигателя постоянного тока независимого возбуждения
Основное преимущество двигателей постоянного тока перед двигателями переменного тока – это относительная легкость регулирования частоты вращения. Известно несколько способов регулирования скорости, которые можно получить из анализа зависимостей (2.4) или (2.5). Регулирование осуществляют: путем изменения сопротивления обмотки якоря, точнее включением последовательно с ней добавочного сопротивления; изменением потока возбуждения или напряжения питания якоря.
Первый способ отличают небольшие затраты на его осуществление, но при эксплуатации, из-за больших потерь мощности на добавочном сопротивлении, его целесообразно применять только для маломощных двигателей и там, где не предъявляется больших требований к стабильности скорости, т.к. этот способ снижает жесткость механической характеристики двигателя.
Н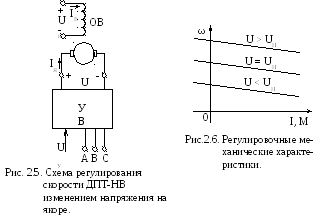 а
практике изменение магнитного потока
возбуждения возможно только в сторону
его уменьшения, т.к. при увеличении
потока, требуется повысить ток возбуждения
выше номинального, что приведет к
перегреву обмотки возбуждения и двигателя
в целом. Кроме того, двигатель рассчитан
и сконструирован так, что его магнитная
система близка к насыщению, поэтому
увеличение тока возбуждения не приведет
к заметному росту потока возбуждения.
Однако, уменьшение потока возбуждения
из (2.4) приводит к росту скорости двигателя.
На практике же в большинстве случаев
требуется ее снижать, что в данном
способе невозможно.
а
практике изменение магнитного потока
возбуждения возможно только в сторону
его уменьшения, т.к. при увеличении
потока, требуется повысить ток возбуждения
выше номинального, что приведет к
перегреву обмотки возбуждения и двигателя
в целом. Кроме того, двигатель рассчитан
и сконструирован так, что его магнитная
система близка к насыщению, поэтому
увеличение тока возбуждения не приведет
к заметному росту потока возбуждения.
Однако, уменьшение потока возбуждения
из (2.4) приводит к росту скорости двигателя.
На практике же в большинстве случаев
требуется ее снижать, что в данном
способе невозможно.
Поэтому лучшим способом является регулирование скорости путем изменения напряжения питания якоря. В этом способе якорь двигателя подключают к регулируемому источнику постоянного тока, в качестве которого обычно служит управляемый выпрямитель УВ рис. 2.5. Управляемый выпрямитель обычно питается переменным трехфазным напряжением. Величиной выходного постоянного напряжения U управляют, например, путем изменения величины управляющего напряжения UУ, что может осуществлять оператор или система автоматического регулирования. Регулировочные механические характеристики при этом имеют вид, показанный на рис. 2.6. Они имеют вид прямых с одинаковым наклоном к оси абсцисс, т.е. жесткость (наклон) характеристики не меняется с изменением скорости вращения.
Реверс двигателя (изменение направления вращения якоря) осуществляют, меняя полярность источника питания якорной цепи или цепи возбуждения.
32. Основные схемы включения дпт. Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.

Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
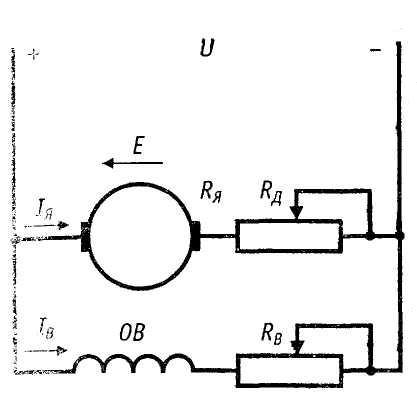
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
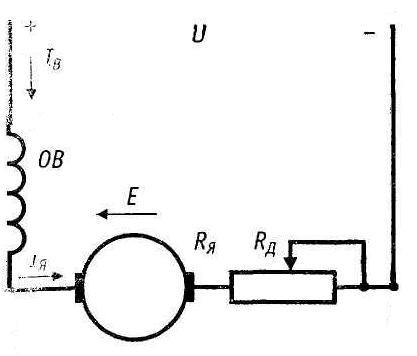
Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
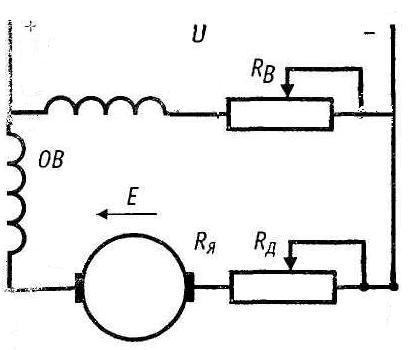
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
 Рисунок
1
Рисунок
1
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
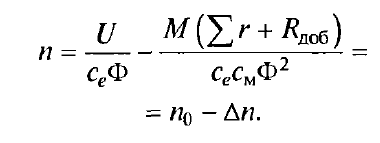
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
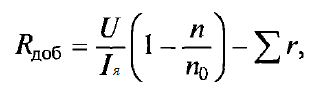
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
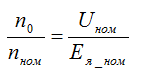
откуда:
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Генератор постоянного тока независимого возбуждения
Схема включения генератора независимого возбуждения показана на рис. 28.2, а. Реостат rрг, включенный в цепь возбуждения, дает возможность регулировать ток Iв в обмотке возбуждения, а следовательно, и основной магнитный поток машины. Обмотка возбуждения питается от источника энергии постоянного тока: аккумулятора, выпрямителя или же другого генератора постоянного тока, называемого в этом случае возбудителем.

Рис. 28.2 Принципиальная схема (а) и характеристики х.х. (б) генератора независимого возбуждения
Характеристика холостого хода генератора постоянного тока независимого возбуждения
При снятии характеристики U0= F(IВ) генератор работает в режиме х.х. (Ia = 0). Установив номинальную частоту вращения и поддерживая ее неизменной, постепенно увеличивают ток в обмотке возбуждения Iв от нулевого значения до +Iв = Oa, при котором напряжение х.х. U0 = 1.15Uном . Получают данные для построения кривой 1 (рис. 28.2, б). Начальная ордината кривой 1 не равна нулю, что объясняется действием небольшого магнитного потока остаточного магнетизма, сохранившегося от предыдущего намагничивания машины. Уменьшив ток возбуждения до нуля, и изменив его направление, постепенно увеличивают ток в цепи возбуждения до -Iв = Oб. Полученная таким образом кривая 2 называется нисходящей ветвью характеристики. В первом квадранте кривая 2 располагается выше кривой 1. Объясняется это тем, что в процессе снятия кривой 1 произошло увеличение магнитного потока остаточного намагничивания. Далее опыт проводят в обратном направлении, т. е. уменьшают ток возбуждения от -Iв = Oб до Iв = 0, а затем увеличивают его до значения +Iв = Oa. В результате получают кривую 3, называемую восходящей ветвью характеристики х.х. Нисходящая и восходящая ветви характеристики х.х. образуют петлю намагничивания. Проведя между кривыми 2 и 3 среднюю линию 4, получим расчетную характеристику х.х.
Прямолинейная часть характеристики х.х. соответствует ненасыщенной магнитной системе машины. При дальнейшем увеличении тока сталь машины насыщается и характеристика приобретает криволинейный характер. Зависимость U0= F(IВ) дает возможность судить о магнитных свойствах машины.
Нагрузочная характеристика генератора постоянного тока независимого возбуждения
Эта характеристика выражает зависимость напряжения U на выходе генератора от тока возбуждения Iв при неизменных токе нагрузки, например номинальном, и частоте вращения. При указанных условиях напряжение на выводах генератора меньше ЭДС , поэтому нагрузочная характеристика 1 располагается ниже характеристики холостого хода 2 (рис. 28.3). Если из точки а, соответствующей номинальному напряжению Uном, отложить вверх отрезок аb, равный IaΣr, и провести горизонтально отрезок bс до пересечения с характеристикой х.х., а затем соединить точки а и с, то получим аbс — треугольник реактивный (характеристический).
Так, при работе генератора в режиме х.х. при токе возбуждения IВ1 = IВ.ном напряжение на выводах U0 = de ; с подключением нагрузки (при неизменном токе возбуждения) напряжение генератора снизится до значения Uном = ae . Таким образом, отрезок dа выражает значение напряжения ΔU = U0 — Uном при IВ1 = IВ.ном. Напряжение на выводах генератора в этом случае уменьшилось в результате действия двух причин: падения напряжения в цепи якоря и размагничивающего влияния реакции якоря . Измерив значение сопротивления цепи якоря и подсчитав падение напряжения IaΣr, можно определить ЭДС генератора при заданном токе нагрузки: Ea = U + IaΣr. На рис. 28.3 эта ЭДС представлена отрезком bе. Электродвижущая сила генератора при нагрузке меньше, чем в режиме х.х. (bе < dе), что объясняется размагничивающим влиянием реакции якоря. Для количественной оценки этого влияния из точки с опускаем перпендикуляр на ось абсцисс. Полученный отрезок cf представляет собой ЭДС генератора при нагрузке; в режиме х.х. для создания этой ЭДС необходим ток возбуждения IВ2 < IВ1. Следовательно, отрезок fе, равный разности токов возбуждения IВ1 — IВ2, представляет собой ток возбуждения, компенсирующий размагничивающее влияние реакции якоря.
![clip_image002[13]](/800/600/https/electrikam.com/wp-content/uploads/2015/04/clip_image00213_thumb1.jpg "clip_image002[13]")
Рис. 28.3. Нагрузочная характеристика генератора независимого возбуждения
Катеты реактивного треугольника количественно определяют причины, вызывающие уменьшение напряжения генератора при его нагрузке: падение напряжения в цепи якоря определяет катет
ab = IaΣr (28.7)
ток возбуждения IВ1 — IВ2, компенсирующий размагничивающее действие реакции якоря, определяет катет
![clip_image006[6]](/800/600/https/electrikam.com/wp-content/uploads/2015/04/clip_image0066_thumb.gif "clip_image006[6]") , (28.8)
, (28.8)
где Fqd и Fad — величины, определяющие размагничивающее действие реакции якоря по поперечной и продольной осям ; ![clip_image012[4]](/800/600/https/electrikam.com/wp-content/uploads/2015/04/clip_image0124_thumb.gif "clip_image012[4]") —число витков в полюсной катушке обмотки возбуждения.
—число витков в полюсной катушке обмотки возбуждения.
Реактивный треугольник а’b‘с’ построен для другого значения тока возбуждения IВ3. Сторона а’b‘ треугольника осталась неизменной (а’b‘ = ab), что объясняется неизменностью тока нагрузки, но сторона b‘с’ уменьшилась (b‘с’ < bс), так как при меньшем токе возбуждения уменьшилась степень насыщения магнитной цепи генератора, а следовательно, и размагничивающее действие реакции якоря.
Внешняя характеристика генератора постоянного тока независимого возбуждения
Эта характеристика представляет собой зависимость напряжения U на выводах генератора от тока нагрузки I. При снятии данных для построения внешней характеристики генератор приводят во вращение с номинальной скоростью и нагружают его до номинального тока при номинальном напряжении. Затем, постепенно уменьшая нагрузку вплоть до х.х. (I= 0), снимают показания приборов. Сопротивление цепи возбуждения rB и частоту вращения в течение опыта поддерживают неизменными.
На рис. 28.4, а представлена внешняя характеристика генератора независимого возбуждения, из которой видно, что при увеличении тока нагрузки I напряжение на выводах генератора понижается; это объясняется размагничивающим влиянием реакции якоря и падением напряжения в цепи якоря. Наклон внешней характеристики к оси абсцисс (жесткость внешней характеристики) оценивается номинальным изменением напряжения генератора при сбросе нагрузки:
![clip_image002[11]](/800/600/https/electrikam.com/wp-content/uploads/2015/04/clip_image00211_thumb.gif "clip_image002[11]") . (28.9)
. (28.9)
Обычно для генератора независимого возбуждения ΔUном = 5 – 10% .
Регулировочная характеристика генератора постоянного тока независимого возбуждения
Характеристика IВ= F(I) показывает, как следует менять ток в цепи возбуждения, чтобы при изменениях нагрузки генератора напряжение на его выводах оставалось неизменным, равным номинальному. При этом частота вращения сохраняется постоянной (n – const).
При работе генератора без нагрузки в цепи возбуждения устанавливают ток Iво, при котором напряжение на выводах генератора становится равным номинальному. Затем постепенно увеличивают нагрузку генератора, одновременно повышают ток возбуждения таким образом, чтобы напряжение генератора во всем диапазоне нагрузок оставалось равным номинальному. Так получают восходящую ветвь характеристики (кривая 1 на рис. 28.4, б). Постепенно уменьшая нагрузку генератора до х.х. и регулируя соответствующим образом ток возбуждения, получают нисходящую ветвь характеристики (кривая 2 на рис. 28.4, б). Нисходящая ветвь регулировочной характеристики расположена ниже восходящей, что объясняется влиянием возросшего остаточного намагничивания магнитной цепи машины в процессе снятия восходящей ветви. Среднюю кривую 3, проведенную между восходящей и нисходящей ветвями, называют практической регулировочной характеристикой генератора.
Основной недостаток генераторов независимого возбуждения — это необходимость в постороннем источнике энергии постоянного тока — возбудителе. Однако возможность регулирования напряжения в широких пределах, а также сравнительно жесткая внешняя характеристика этого генератора являются его достоинствами.
![clip_image002[17]](/800/600/https/electrikam.com/wp-content/uploads/2015/04/clip_image00217_thumb1.jpg "clip_image002[17]")
Рис. 28.4. Внешняя (а) и регулировочная (б) характеристики генератора независимого возбуждения.