Двигатели постоянного тока со смешанным и независимым возбуждением серии П61, П62
Весь каталог — двигатели постоянного тока
Общие технические характеристики электродвигателей постоянного тока П61, П62
Электродвигатели постоянного тока серии П61, П62 выпускаются со смешанными и независимым возбуждением.
Условные обозначения двигателей постоянного тока серии П61, П62.
П Х1 Х2 Х3 М
П – машина постоянного тока;
Х1 – исполнение по степени защиты и способу охлаждения. Без буквы – брызгозащищенное с самовентиляцией 1-6 габарит . Б – закрытое исполнение с естественным охлаждением 1-4 габарит;
Х2 – габарит электрической машины. 1-1 габарит, 2-2 габарит, 3-3 габарит, 4-4 габарит, 5-5 габарит, 6-6 габарит;
Х3 – условная длина сердечника якоря. 1 – первая длина, 2 – вторая длина;
М – морское исполнение.
Электродвигатели постоянного тока могут быть изготовлены с присоединенным тахогенератором. По способу монтажа электродвигатели постоянного тока имеют конструктивное исполнение — IM1001, IM2101, IM2111, IM2131, IM3601, IM3631, IM3611.
По способу монтажа электродвигатели постоянного тока имеют конструктивное исполнение — IM1001, IM2101, IM2111, IM2131, IM3601, IM3631, IM3611.
Условия эксплуатации двигателей постоянного тока П61, П62.
- Двигатели постоянного тока П61, П62 выпускаются для работы при температуре окружающей среды от -40°С до +40°С.
- При температуре окружающей среды 20° ± 5°С % относительная влажность 95°±3°С%.
- Выдерживают — вибрацию, ударные сотрясения, долговременные наклоны оси электродвигателя постоянного тока от 45° в любую сторону и при качке до 45° с периодом качки 7-9 с.
Возбуждение двигателя постоянного тока последовательное, параллельное, смешанное, независимое. Класс нагревостойкости изоляция электродвигателя постоянного тока — Н. Общий уровень вибрации электродвигателей и уровня интенсивности воздушного шума соответствуют всем принятым нормам.
Габаритные и присоединительные размеры электродвигателей постоянного тока П 61, П 62
Двигатель постоянного тока исполнения IM1 (а – без тахогенератора; б – с тахогенератором).
Двигатель постоянного тока исполнения IM2 (а – без тахогенератора; б – с тахогенератором).
Двигатель постоянного тока исполнения IM3, IM4 (а – без тахогенератора; б – с тахогенератором).
Тип двигателей постоянного тока |
Размеры, мм |
Масса, кг при IM2101, IM2102, IM3601, IM2103, IM2104, IM3611, IM3631 |
Масса, кг при IM1001, IM1004 |
||||||
b10 |
d1 |
d20 |
d30 |
l30 |
h |
||||
П-61У4 |
300 |
40 |
300 |
411 |
265 |
634 |
225 |
173 |
|
ПБ-61У2 |
664 |
178 |
170 |
||||||
П6-2У4 |
300 |
40 |
300 |
411 |
300 |
669 |
225 |
190 |
182 |
ПБ-62У2 |
699 |
198 |
190 |
||||||
Габаритные и присоединительные размеры двигателей постоянного тока П61, П62, с тахогенератором, вентилятором типа «Наездник»
Типоразмер машины |
Размеры, мм |
Масса, кг |
|||||||
b10 |
d1 |
d20 |
d30 |
l10 |
l30 |
h |
IM2101 |
IM1001 |
|
IM3601 |
|||||||||
П-61У4 |
300 |
40 |
300 |
411 |
265 |
779 |
225 |
184,5 |
176,5 |
809 |
205 |
189,5 |
181,5 |
||||||
П-62У4 |
300 |
40 |
300 |
411 |
300 |
814 |
225 |
201,5 |
193,5 |
844 |
205 |
209,5 |
201,5 |
||||||
Основные технические характеристики электродвигателей постоянного тока П 61, П 62
Тип |
Мощность, кВт |
Напряжение В |
Ток сети А |
Частота вращения, об/мин |
КПД % |
П-61М |
5,15 |
110 | 60,5 |
750/1500 |
77 |
5,15 |
220 |
30,1 |
750/1500 |
78 |
|
7 |
110 |
80 |
1000/2000 |
80 |
|
7 |
220 |
1000/2000 |
80,5 |
||
12 |
110 |
130 |
1500/2250 |
84 |
|
12 |
220 |
65 |
1500/2250 |
84 |
|
21 |
220 |
2800 |
86 |
||
26 |
220 |
134 |
3000/3300 |
88 |
|
П-62М |
6,8 |
110 |
78,4 |
750/1500 |
79 |
6,8 | 220 |
38,3 |
750/1500 |
80 |
|
8,5 |
110 |
94 |
1000/2000 |
82 |
|
8,5 |
220 |
46,4 |
1000/2000 |
83 |
|
16 |
110 |
171 |
1500/2250 |
85 |
|
16 |
220 |
85 |
1500/2250 |
85,5 |
|
27 |
220 |
142 |
2800 |
86,5 |
Двигатель постоянного тока купить по лучшей цене у нас — это просто!
Каталог — электродвигатели постоянного тока
Электродвигатели постоянного тока серии П 1, 2, 3, 4 габаритов
Электродвигатели постоянного тока серии П51, П52
Электродвигатели постоянного тока серии П61, П62
Двигатели постоянного тока серии 2П (2ПО132 — 2ПО200, 2ПФ132 — 2ПФ200)
Электродвигатели постоянного тока 2ПН, 2ПБ
Электрические машины постоянного тока серии 4П
Двигатели постоянного тока ДП-112, ДК-112, ДКУ-112
Двигатели МР на постоянных магнитах
Двигатели МТА на постоянных магнитах
Двигатели PI, PC, 3PI на постоянных магнитах
Двигатели MX, МВН, МВО на постоянных магнитах
Электродвигатели постоянного тока серии Д
Электродвигатели постоянного тока ДПМ
Электродвигатели постоянного тока ДПУР
Электродвигатели постоянного тока ПБС, ПБСТ
Электродвигатели постоянного тока ДК-309М
При оформлении заказа обеспечивается доставка оборудования по всей России (полный список регионов России)
Многолетний опыт работы на рынке электротехнического оборудования, сотрудничество с заводами-изготовителями, а также наличие продукции на наших складах, позволяет осуществлять покупку и доставку электрооборудования и комплектующих в кратчайшие сроки. Специалисты компании «СпецЭлектро» помогут найти оптимальное решение по техническим характеристикам, цене и времени доставки электродвигателя или оборудования для Вашей задачи. Наши специалисты подберут замену для устаревшей серии оборудования и ответят на все интересующие Вас вопросы, помогут купить электродвигатель и подходящее вам оборудование.
Специалисты компании «СпецЭлектро» помогут найти оптимальное решение по техническим характеристикам, цене и времени доставки электродвигателя или оборудования для Вашей задачи. Наши специалисты подберут замену для устаревшей серии оборудования и ответят на все интересующие Вас вопросы, помогут купить электродвигатель и подходящее вам оборудование.
Купить электрооборудование с доставкой — это просто!
При покупке электрооборудования, компания обеспечит постгарантийное обслуживание
Машины постоянного тока. Электродвигатели и генераторы. – www.motors33.ru
1. Особенности коллекторных машин постоянного тока
Коллекторные машины — это в основном машины постоянного тока. Они выпускаются мощностью от долей ватта до десятков тысяч киловатт. Коллекторные машины переменного тока находят применение в качестве приводных двигателей лишь для узкого круга специальных механизмов небольшой мощности, например как приводы некоторых бытовых приборов, электрифицированного ручного инструмента, медицинского оборудования, т.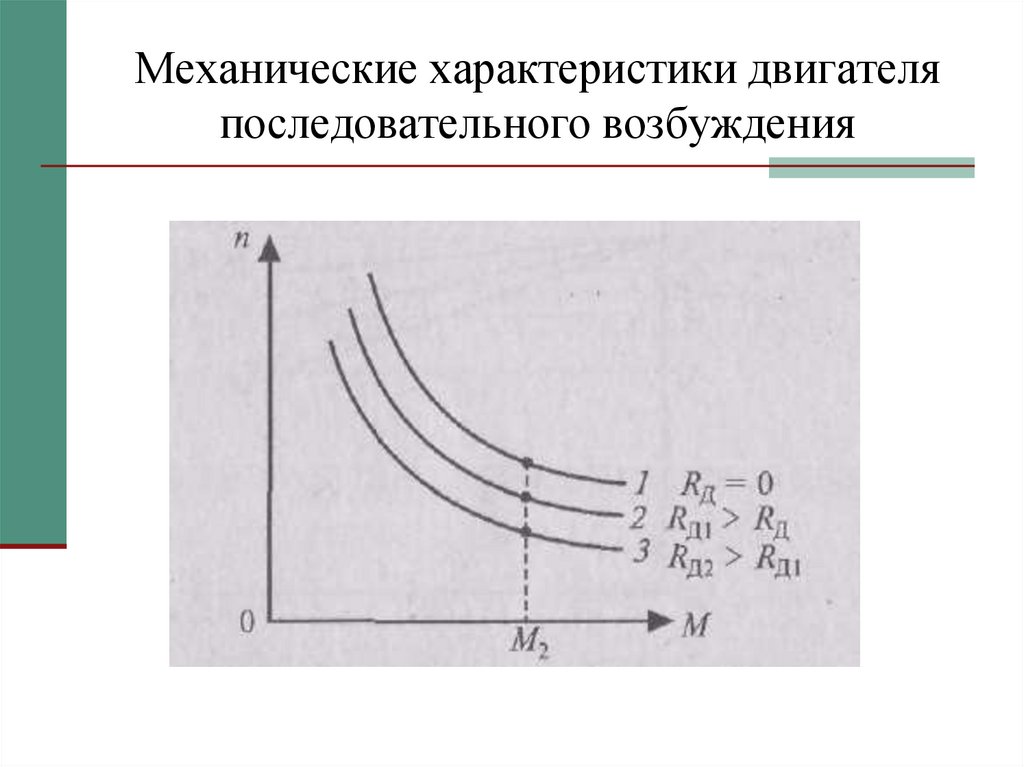 е. в тех случаях, когда для питания двигателей используется однофазный и реже трехфазный переменный ток, а характеристики асинхронных машин не удовлетворяют требованиям приводного механизма.
е. в тех случаях, когда для питания двигателей используется однофазный и реже трехфазный переменный ток, а характеристики асинхронных машин не удовлетворяют требованиям приводного механизма.
Коллекторные машины постоянного тока используются как двигатели и как генераторы. В промышленности более распространены двигатели, что объясняется все возрастающим применением различных статических выпрямителей, обеспечивающих промышленные установки энергией постоянного тока.
Широкое распространение электродвигателей постоянного тока несмотря на их более высокую стоимость и сложность эксплуатации по сравнению с асинхронными двигателями, объясняется в первую очередь простыми и надежными способами регулирования частоты вращения, большими пусковыми моментами и перегрузочной способностью, чем у двигателей переменного тока. Наибольшее распространение двигатели постоянного тока получили в приводах, требующих глубокого регулирования частоты вращения (металлургическая промышленность, транспорт и т.
Рис. 1. Двигатель постоянного тока серии 2П:
1 — тахогенератор; 2 — траверса; 3 — коллектор; 4 — станина; 5 — якорь; 6 — главный полюс; 7 — добавочный полюс;
Основными конструктивными элементами машин постоянного тока (рис. 1) являются станина с закрепленными на ней главными и добавочными полюсами, вращающийся якорь с обмоткой и коллектором и щеточный аппарат. В машинах малой и средней мощностей станина одновременно служит и корпусом, к которому крепятся лапы для установки машины, и частью магнитопровода. По ней замыкается магнитный поток. В большинстве машин станина выполнена массивной, из стальных труб, либо сварной из листов конструкционной стали. В ряде машин станину выполняют шихтованной.
К внутренней поверхности станины крепят главные и добавочные полюсы. Сердечники главных полюсов массивные либо набраны из листов стали толщиной 1 — 2 мм. Сердечники добавочных полюсов, как правило, массивные. На главных полюсах располагаются обмотки возбуждения; их МДС создают рабочий поток машины. Обмотки добавочных полюсов, расположенных по поперечным осям машины, служат для обеспечения нормальной коммутации.
Обмотки добавочных полюсов, расположенных по поперечным осям машины, служат для обеспечения нормальной коммутации.
Магнитопровод якоря шихтуется из листов электротехнической стали. В машинах малой мощности сердечник якоря насаживается непосредственно на вал со шпонкой и фиксируется в осевом направлении буртиком вала и кольцевой шпонкой. С торцов якоря для предотвращения распушения листов во время работы установлены нажимные шайбы, совмещенные с обмоткодержателями.
Обмотки якорей двухслойные. В машинах мощностью до 15 — 20 кВт они выполнены из круглого провода и уложены в полузакрытые пазы. В пазовых частях обмотка крепится пазовыми клиньями, в лобовых — бандажами из стеклоленты или немагнитной стальной проволоки, которые прижимают их к обмоткодержателям. В машинах большой мощности катушки обмотки якоря наматывают из прямоугольного провода и укладывают в открытые пазы. Крепление обмотки либо такое же, как и в машинах малой мощности, т. е. клиньями в пазовой и бандажами в лобовой части, либо бандажами и в пазовой, и в лобовой части.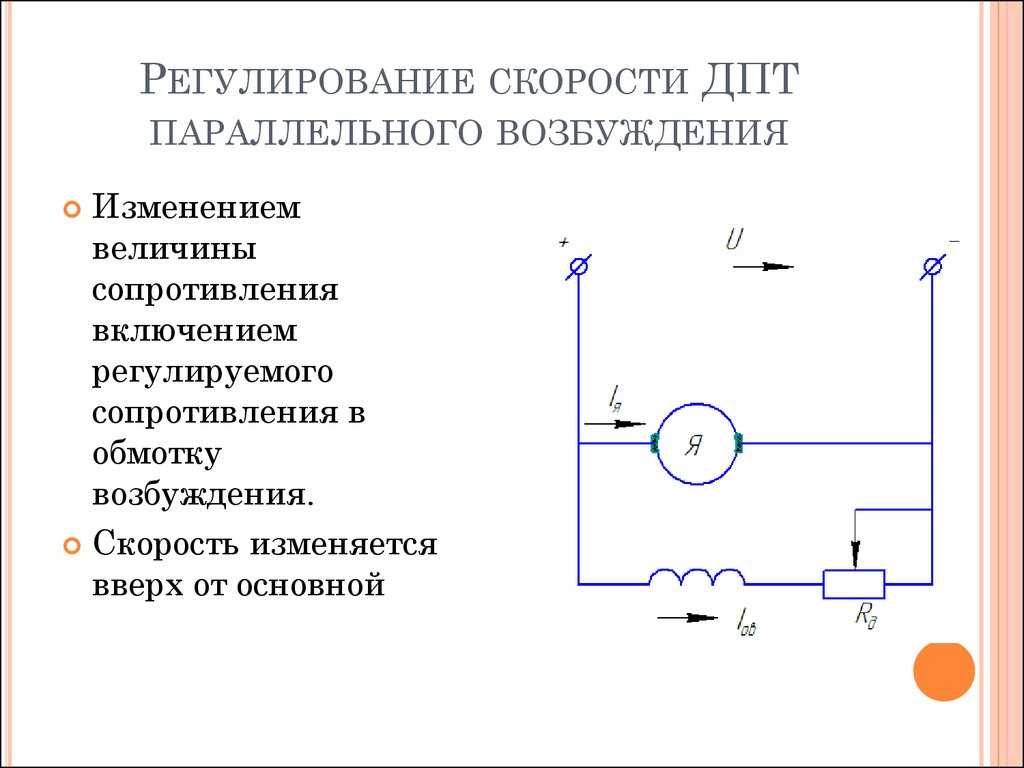 Выводные концы каждой секции обмотки впаиваются в прорези коллекторных пластин.
Выводные концы каждой секции обмотки впаиваются в прорези коллекторных пластин.
Коллекторы в большинстве машин общего назначения цилиндрические. Торцевые коллекторы применяют лишь в некоторых машинах малой мощности специального назначения. Во всех цилиндрических коллекторах пластины имеют клиновидную форму с углом наклона, при котором пластины, собранные в кольцо, плотно прилегают друг к другу боковыми поверхностями и зажимают миканитовую изоляцию (рис. 2). Наибольшее распространение получили коллекторы, в которых пластины удерживаются в сжатом состоянии металлическими нажимными конусами (рис. 3) либо опрессовкой в пластмассу (рис. 4).
Рис. 2. Положение коллекторных пластин в цилиндрических коллекторах:
1 — пластины коллектора; 2 — изоляция между пластинами; Р — сила давления нажимных конусов; Р, — сила арочного распора
В коллекторах с нажимными конусами пластины закрепляются передвижением переднего нажимного конуса по втулке коллектора. При этом создается давление на нижнюю часть ласточкина хвоста пластин и возникает арочный распор (рис. 2). Такие коллекторы называют арочными. Пластины коллектора с расположенными между ними изоляционными прокладками образуют монолитное кольцо. Нажимные конусы изолируют от пластин миканитовыми фигурными прокладками — манжетами, имеющими большую механическую прочность.
2). Такие коллекторы называют арочными. Пластины коллектора с расположенными между ними изоляционными прокладками образуют монолитное кольцо. Нажимные конусы изолируют от пластин миканитовыми фигурными прокладками — манжетами, имеющими большую механическую прочность.
Рис. 3. Коллектор с нажимными конусами:
1 — передний нажимной конус; 2 — пластины коллектора ; 3 — втулка коллектора; 4 — изоляционная манжета; 5 —задний нажимной конус
Коллекторы на пластмассе более просты в изготовлении, но в силу меньшей механической прочности и надежности не применяются в машинах большой мощности.
В некоторых быстроходных машинах, например в возбудителях турбогенераторов, из-за больших центробежных сил, действующих на пластины коллектора, прочность их крепления с помощью ласточкиных хвостов оказывается недостаточной и коллекторные пластины крепят на втулку с помощью внешних бандажных колец (рис. 5).
Рис. 5. Принципиальная конструкция коллектора с бандажными кольцами:
1 — изоляция под бандажными кольцами; 2 — бандажные кольца; 3 — пластины коллектора; 4 — втулка коллектора
Щетки коллекторных машин устанавливают в щеткодержатели, закрепленные на щеточных пальцах, причем на каждом щеточном пальце может быть установлено по нескольку щеткодержателей и щеток, соединенных между собой параллельно.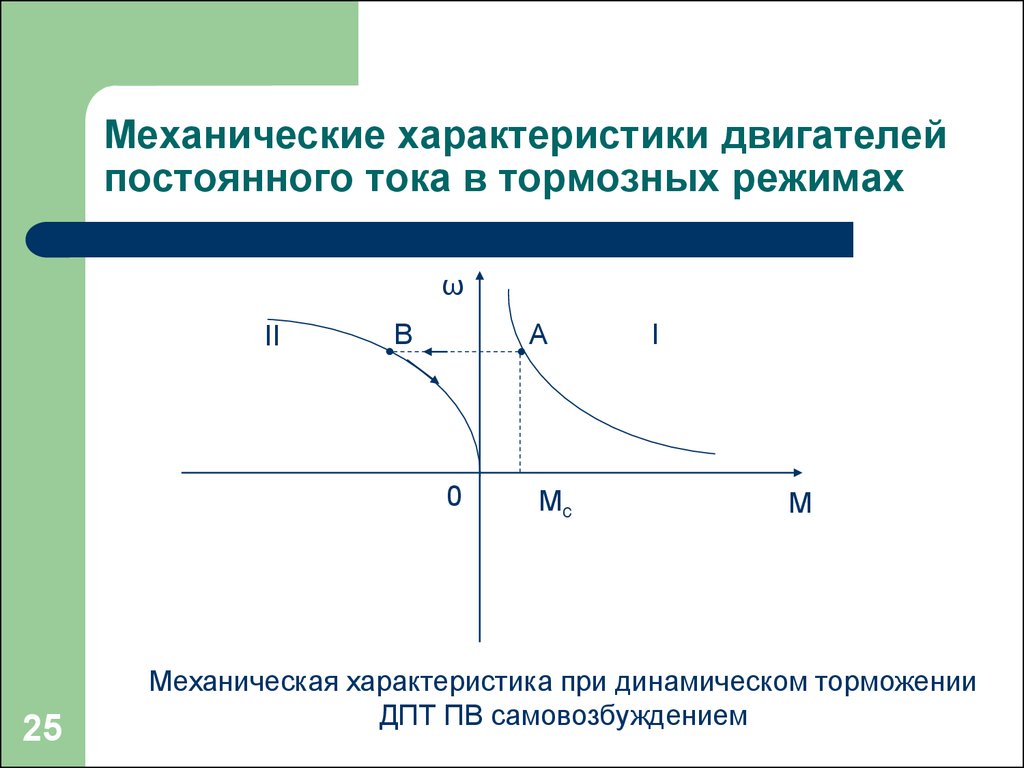 Число щеток и их размеры определяются номинальным током машины. Число щеточных пальцев должно быть равно числу полюсов машины. Двигатели с волновой обмоткой на якоре при отсутствии места для установки полного комплекта щеточных пальцев допускают установку неполного числа щеточных пальцев, что используется в некоторых конструкциях тяговых двигателей. Щеточные пальцы укреплены на траверсе, которая допускает поворот на некоторый угол вокруг оси машины для регулирования положения щеток на коллекторе.
Число щеток и их размеры определяются номинальным током машины. Число щеточных пальцев должно быть равно числу полюсов машины. Двигатели с волновой обмоткой на якоре при отсутствии места для установки полного комплекта щеточных пальцев допускают установку неполного числа щеточных пальцев, что используется в некоторых конструкциях тяговых двигателей. Щеточные пальцы укреплены на траверсе, которая допускает поворот на некоторый угол вокруг оси машины для регулирования положения щеток на коллекторе.
В последние годы получают распространение бесколлекторные двигатели постоянного тока, в которых механический преобразователь тока — коллектор со щеточным аппаратом — заменен вентильным коммутатором. Вентильные двигатели имеют широкий диапазон регулирования частоты вращения и не имеют недостатков, связанных с работой скользящих контактов коллектор—щетки, характерных для коллекторных машин постоянного тока.
3. Характеристики машин постоянного тока.
Машины постоянного тока по своим характеристикам определяются системой возбуждения: независимой, параллельной, последовательной или смешанной.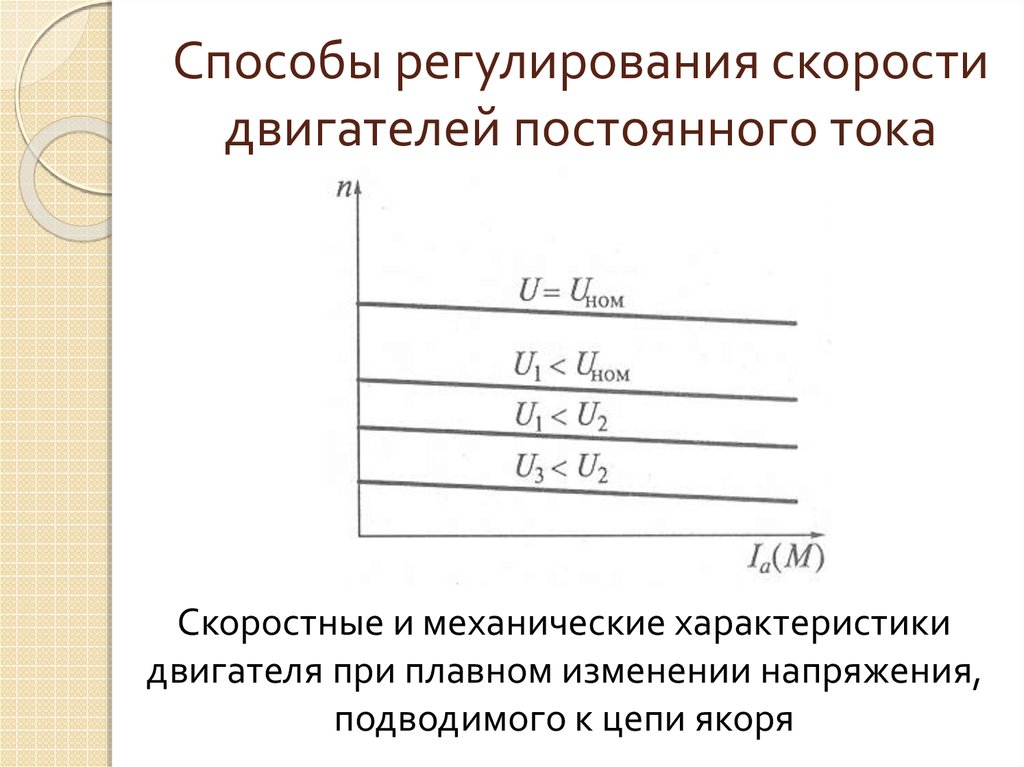
При независимой системе возбуждения обмотка возбуждения питается от постороннего источника постоянного тока и ток возбуждения не зависит от режима работы и нагрузки машины. Генераторы с независимой системой возбуждения допускают регулирование напряжения практически от нуля до номинального. Изменение напряжения при увеличении нагрузки определяется только размагничивающим действием реакции якоря и увеличением падения напряжения на сопротивлении якорной цепи.
Ток параллельной обмотки возбуждения генераторов с самовозбуждением меняется в зависимости от напряжения на выводах генератора и уменьшается с ростом нагрузки из-за размагничивающего действия реакции якоря, что в свою очередь приводит к добавочному увеличению падения напряжения. За счет этого номинальное падение напряжения генераторов с параллельным возбуждением больше, чем генераторов с независимым возбуждением.
В генераторах со смешанной системой возбуждения при согласном включении параллельной и последовательной обмоток поток стабилизируется, так как размагничивающее действие реакции якоря компенсируется изменением МДС последовательной обмотки, пропорциональным току нагрузки. Последовательную обмотку таких машин называют стабилизирующей. Номинальное падение напряжения генераторов со стабилизирующей обмоткой мало. Некоторые генераторы выполнены со стабилизирующей обмоткой, при которой обеспечивается равенство 7НОМ = (7Х|Х (где 1/Х]Х — напряжение холостого хода).
Последовательную обмотку таких машин называют стабилизирующей. Номинальное падение напряжения генераторов со стабилизирующей обмоткой мало. Некоторые генераторы выполнены со стабилизирующей обмоткой, при которой обеспечивается равенство 7НОМ = (7Х|Х (где 1/Х]Х — напряжение холостого хода).
При встречном включении параллельной и последовательной обмоток возбуждения напряжение на выводах генератора резко падает с увеличением тока нагрузки. Такие системы возбуждения находят применение в сварочных генераторах постоянного тока.
В двигателях параллельного возбуждения размагничивающее действие реакции якоря может вызвать неустойчивую работу, так как уменьшение потока с ростом нагрузки из-за действия реакции якоря при малом суммарном сопротивлении якорной цепи приводит к увеличению частоты вращения двигателя. Поэтому в большинстве двигателей средней и во всех двигателях большой мощности помимо параллельной устанавливается последовательная обмотка возбуждения, стабилизирующая магнитный поток и придающая устойчивость механической характеристике (рис. 7, а).
7, а).
Рис. 7. Механические характеристики двигателей постоянного тока:
а — смешанного возбуждения; б — последовательного возбуждения
Механические характеристики двигателей с последовательным возбуждением (рис. 7,б) имеют специфический «падающий» характер. Двигатели с последовательным возбуждением используются в приводах, требующих больших пусковых моментов и устойчивой работы при малых частотах вращения.
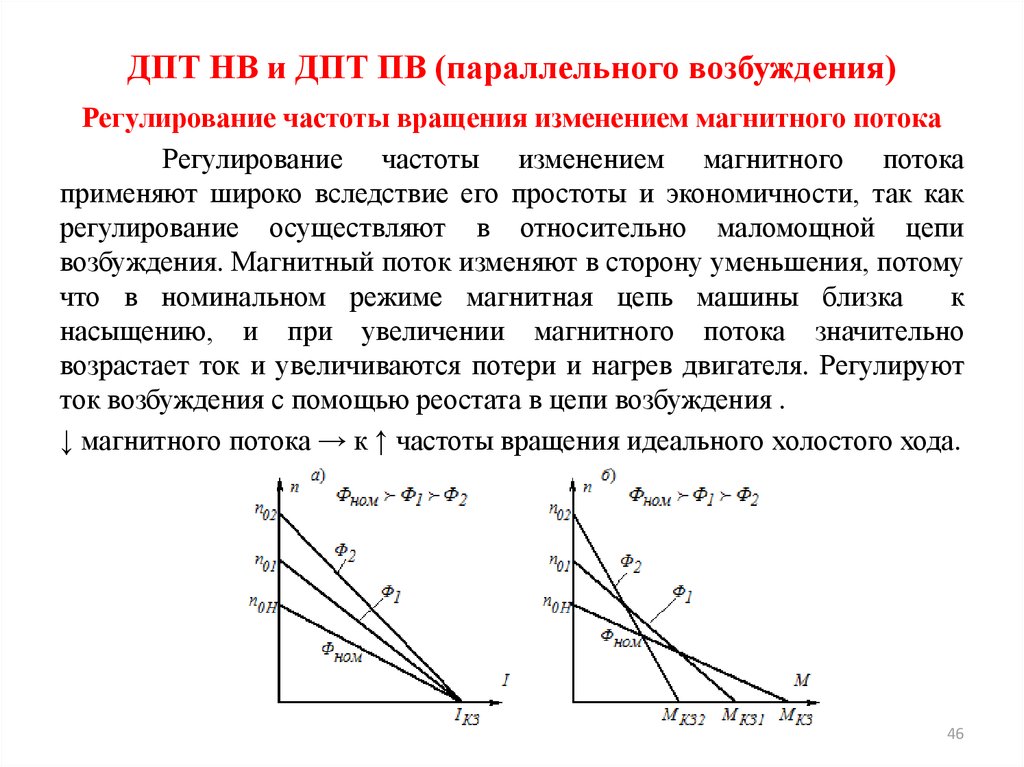
4. Регулирование частоты вращения машин постоянного тока.
Частота вращения двигателя при неизменной нагрузке может быть изменена регулированием питающего напряжения U, включением последовательно с якорем дополнительного регулировочного резистора и изменением магнитного потока машины (изменением тока возбуждения). В практике применяются все три способа регулирования.
Регулирование частоты вращения изменением подводимого напряжения встречает трудности, связанные со сложностью преобразования напряжения постоянного тока. Для этой цели либо применяют статические преобразователи напряжения, либо питают двигатель от отдельного генератора постоянного тока, допускающего плавное регулирование напряжения (система генератор — двигатель).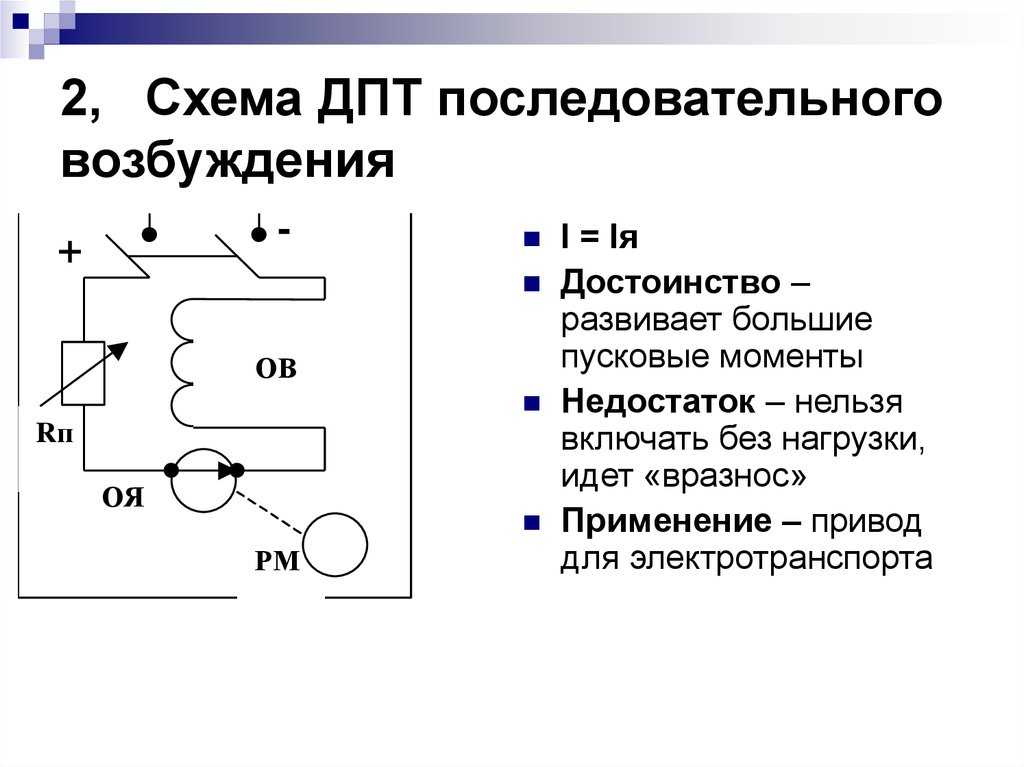 Такие системы применяют лишь для отдельных специальных приводов, требующих регулирования частоты вращения по сложной программе, например для главных двигателей прокатных станов.
Такие системы применяют лишь для отдельных специальных приводов, требующих регулирования частоты вращения по сложной программе, например для главных двигателей прокатных станов.
Регулирование частоты вращения потоком является наиболее экономичным способом, так как потери в регулировочных резисторах, включаемых для этой цели последовательно с обмоткой возбуждения, невелики из-за малого тока возбуждения.
Однако этот способ позволяет лишь увеличивать частоту вращения двигателей по сравнению с номинальной. Такой способ регулирования предусмотрен для всех серийных двигателей постоянного тока.
Включение добавочного резистора в цепь якоря дает возможность плавно регулировать частоту вращения, но сопряжено с большими потерями в регулировочном реостате, по которому проходит полный ток нагрузки. Этот способ используется, например, для регулирования частоты вращения тяговых двигателей.
В современных системах регулирования частоты вращения двигателей постоянного тока применяются тиристорные схемы, позволяющие осуществить регулирование частоты вращения в широких пределах по заданной программе. Датчиками частоты вращения для осуществления обратной связи при регулировании могут быть тахогенераторы, размещенные на валу якоря двигателя (рис. 1).
Датчиками частоты вращения для осуществления обратной связи при регулировании могут быть тахогенераторы, размещенные на валу якоря двигателя (рис. 1).
5. Коммутация машин постоянного тока
Коммутация машин постоянного тока, т. е. изменение направления тока в секциях обмотки якоря при переходе секций от одного полюсного деления к другому, происходит при кратковременном замыкании их щетками на пластинах коллектора. При коммутации в короткозамкнутых секциях возникают реактивная ЭДС и ЭДС вращения, наводимая потоком реакции якоря, магнитные силовые линии которого пронизывают замкнутые при коммутации секции. При движении коллектора в момент отхода пластины коллектора от замыкающей данную секцию щетки происходит разрыв цепи (замкнутой секции), имеющей индуктивное сопротивление, и возникает искрение между сбегающим краем щетки и коллекторной пластиной. При неудовлетворительной коммутации искрение может быть значительным и может привести к местному повреждению коллектора, что в свою очередь ухудшает переходный контакт щетка—коллектор и усиливает искрение. Качество коммутации машины постоянного тока оценивается по интенсивности искрения на коллекторе (табл. 1).
Качество коммутации машины постоянного тока оценивается по интенсивности искрения на коллекторе (табл. 1).
Для улучшения коммутации во всех машинах постоянного тока, кроме машин малой мощности, устанавливают добавочные полюсы, МДС которых компенсирует МДС реакции якоря по поперечной оси машины, т. е. в зоне расположения коммутируемых секций. Кроме того, поток, создаваемый обмоткой добавочных полюсов, наводит в замкнутых при коммутации секциях ЭДС, несколько превышающую реактивную ЭДС секций и направленную ей навстречу. Коммутация машины при этих условиях становится прямолинейной или даже ускоренной. Напряжение под сбегающим краем щеток уменьшается до весьма малых значений и искрение под щетками становится не опасным для работы машины.
В крупных машинах постоянного тока кроме добавочных полюсов в пазах на наконечниках главных полюсов располагают компенсационную обмотку . Компенсационная обмотка предназначена для компенсации воздействия реакции якоря на поток возбуждения по продольной оси. Уменьшение влияния реакции якоря позволяет выполнять машины с уменьшенным воздушным зазором и улучшить их коммутацию.
Уменьшение влияния реакции якоря позволяет выполнять машины с уменьшенным воздушным зазором и улучшить их коммутацию.
Таблица 1. Оценка степени искрения под сбегающим краем щеток по ГОСТ 183-74
| Степень искрения | Характеристика степени искрения | Состояние коллектора и щеток |
| 1 | Отсутствие искрения | Отсутствие почернения на коллекторе и следов нагара на щетках |
| ll 4 | Слабое искрение под небольшой частью края щетки | |
| ‘i | Слабое искрение под большей частью края щетки | Появление следов почернения на кол-[ лекторе и следов нагара на щетках, легко устраняемых протиранием поверхности коллектора бензином |
| 2 | Искрение под всем краем щетки. Допускается только при кратковременных толчках нагрузки и перегрузки | Появление следов почернения на коллекторе и следов нагара на щетках, не устраняемых протиранием поверхности коллектора бензином |
| 3 | Значительное искрение под всем краем щетки с появлением крупных и вылетающих искр. Допускается только при прямом включении или реверсировании машин, если при этом коллектор и щетки остаются в состоянии, пригодном для дальнейшей работы Допускается только при прямом включении или реверсировании машин, если при этом коллектор и щетки остаются в состоянии, пригодном для дальнейшей работы | Значительное почернение на коллекторе, не устраняемое протиранием поверхности коллектора бензином, а также подгар и частичное разрушение щеток |
Принцип действия двигателя постоянного тока и область применения
Постоянство электрического тока не позволяет изменяться параметрам, связанным с величиной и направлением. Принцип действия двигателя постоянного тока базируется именно на таких особенностях электрической цепи и конструктивных характеристиках.Конструкция двигателя
Двигатели данного типа активно используются в превращении постоянной токовой энергии в механический тип работоспособности.
Такие электрические устройства получили меньшее распространение по сравнению с конструкциями переменного тока, что обусловлено высокой стоимостью оборудования, более сложным строением и возможными проблемами с запитыванием.
Основные конструктивные элементы ДПТ:
- неподвижная часть, представленная статором;
- вращающаяся часть, представленная ротором или якорем.
Устройство двигателей ПТ имеет несколько весьма существенных отличий от конструкций с переменными токовыми величинами:
- стальная станина снабжается катушечной обмоткой возбуждения;
- наличие дополнительных полюсов, улучшающих общие технические характеристики оборудования;
- установка внутреннего якорного элемента, представленного сердечником и коллектором;
- использование для фиксации подшипниковой системы;
- расположение на статоре постоянных магнитов в микродвигателях или электромагнитов с обмоточным возбуждением в виде катушек.
Устройство двигателя постоянного тока
Базовое отличие — наличие коллектора, подсоединяемого к щеткам, что способствует подаче или снятию напряжения с цепи якоря. Особенностью используемого в конструкции щеточно-коллекторного узла, является одновременное выполнение пары функций, включая специфику работы датчика углового роторного положения и переключение тока с контактами скользящего типа.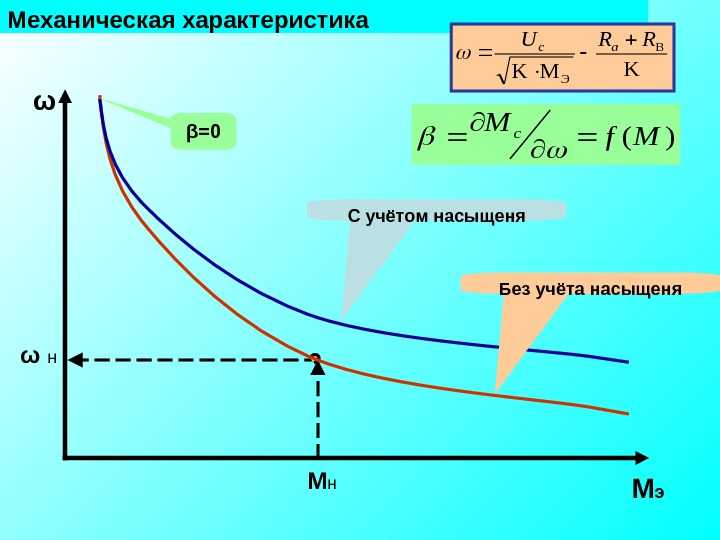
Электрические двигатели постоянных токовых величин эксплуатируются в форме тяговой конструкции некоторых видов транспорта и устройств исполнительного типа.
Преимущества эксплуатации и недостатки конструкции
Основные достоинства двигателей с постоянными токовыми величинами представлены:
- конструкционной простотой устройства;
- интуитивной доступностью управления;
- почти линейного типа механической и регулировочной характеристиками движка;
- легкостью регулирования показателей вращательной частоты;
- достойными пусковыми характеристиками в виде большого пускового момента;
- наибольшим пусковым моментом с характерным последовательным типом возбуждения;
- относительной компактностью по сравнению с габаритами других видов конструкций;
- возможностью применения в режимах двигателя и генератора.
Принцип устройства электродвигателя постоянного тока
К наиболее значимым недостаткам конструкций могут быть отнесены не всегда доступная цена комплектующих изделий, а также необходимость подсоединения выпрямительных устройств.
Современные модели двигателей ПТ практически полностью лишены некоторых основных конструкционных минусов, включая регулярную профилактику щеточно-коллекторных узлов и быстрый износ коллектора.
Принцип действия двигателя постоянного тока
Классификация оборудования основана на видовых особенностях магнитной статорной системы, поэтому может иметь в конструкции:
- магниты постоянного типа;
- электромагнитную систему;
- независимого типа обмоточное подключение с независимым вариантом возбуждения;
- последовательного типа обмоточное подключение с последовательным вариантом возбуждения;
- параллельного типа обмоточное подключение с параллельным вариантом возбуждения;
- смешанный вид обмоточного подключения со смешанным вариантом возбуждения и преобладанием обмотки последовательного или параллельного типа.
Принцип действия электродвигателя
Тип обмоточного подключения оказывает значительное влияние на характеристики тяги и базовые электрические свойства электродвигателя.
Конструкция с независимым или параллельным возбуждением
Обмоточный элемент на якорной части и возбуждении при независимом или параллельном типе, запитаны от различных источников, а функция обмотки возлагается, как правило, на постоянный магнит. Отличительная особенность такого движка представлена отсутствием полной зависимости токового возбуждения от якорного тока на оборудовании.
Скоростные параметры двигателя регулируются в таком случае посредством:
- изменения показателей напряжения на якорной части;
- изменения показателей сопротивления в якорной цепи;
- изменения потокового возбуждения.
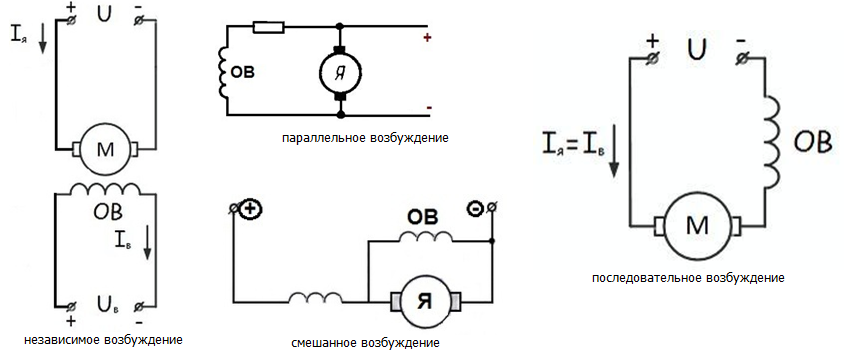
Принципиальные схемы включения двигателей постоянного тока независимого и параллельного возбуждения
Последний вариант регулировки нуждается в использовании сложного оборудования, но активно применяется в электрических приводах современного типа, что обусловлено плавностью и экономичностью балансирования уровня скорости в широком диапазоне, в условиях высоких параметров жесткости, свойств механического типа.
Популярная разновидность обмоточного возбуждения независимого типа базируется на применении постоянных магнитов.
Конструкция с последовательным возбуждением
Для потока возбуждения данного типа применяется якорный ток машины, а обмоточное возбуждение и якорная часть двигателя имеют последовательное подключение относительно питающего источника. Благодаря развитию значительного электромагнитного момента, который пропорционален квадратным показателям якорного тока, двигателям с параллельным типом возбуждения обеспечиваются оптимальные пусковые характеристики.
Двигатель последовательного возбуждения
Таким образом, конструкция отличается большим пусковым моментом на фоне сравнительно малого якорного тока. Конструкционные особенности позволяют двигателям ПТ с параллельным типом возбуждения активно эксплуатироваться в приводных механизмах грузоподъемного и тягового вида.
Важно учитывать, что работа электрического двигателя ПТ последовательного типа возбуждения «вхолостую» или в условиях минимальной нагрузки становится основной и очень частой причиной быстрого износа конструкции.
Регулировка вращательной скорости двигателя ПТ с параллельным возбуждением может выполняться изменениями показателей напряжения и сопротивления якорной цепи, а также в потоковом возбуждении.
Конструкция со смешанным возбуждением
Для электрического движка ПТ, обладающего смешанным типом возбуждения, или компаундного электродвигателя, присущи основные характеристики параллельного и последовательного возбуждения, что обусловлено наличием пары видов обмоток.
Обмоточные элементы подключаются двояко:
- согласное подключение — в процессе включения в электрическую цепь, все сформированные амперные витки и магнитные потоки складываются;
- встречное подключение — включение обмоток возбуждения сопровождается направлением амперных витков и магнитных потоков друг к другу.
Варианты двигателей
Второй способ обмоточного включения в двигателях ПТ со смешанным типом возбуждения используется в спецмашинах.
Наличие в движке двойной обмотки возбуждения расширяет возможности конструирования и изготовления электрических двигателей, значительно отличающихся по своим свойствам и основным техническим характеристикам.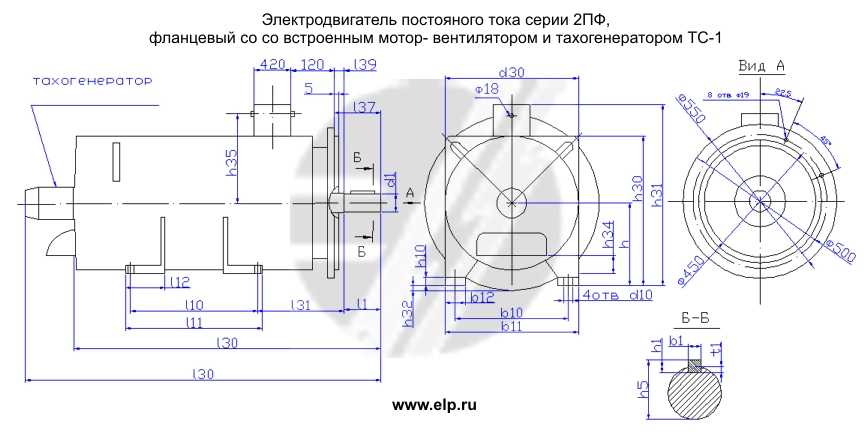
Область применения
Благодаря конструктивным особенностям и принципу функционирования двигателей ПТ разного типа, такие устройства находят широкое применение и устанавливаются:
- в крановом оборудовании на тяжелом производстве;
- в приводных устройствах, нуждающихся в широком регулировании уровня скорости при наличии высокого пускового момента;
- в тяговых электрических двигателях, эксплуатируемых в тепловозах и электровозах, теплоходах и тяжелых самосвалах;
- в электрических стартерах автомобильной и уборочной автоматизированной техники.
Компактные низковольтные электрические двигатели ПТ активно используются в разнообразных устройствах и изделиях, включая игрушки, компьютерную и оргтехнику, а также аккумуляторный инструмент.
Электродвигатели постоянного тока разного вида характеризуются особыми естественными и искусственными механическими свойствами, что обусловлено электрической мощностью, идущей на преобразование и поступающей через якорную цепь. Именно такое устройство позволяет применять движки ПТ в регулируемых приводах разнообразных современных механизмов и достаточно сложных станков.
Именно такое устройство позволяет применять движки ПТ в регулируемых приводах разнообразных современных механизмов и достаточно сложных станков.
Видео на тему
Исследование двигателя постоянного тока с последовательным возбуждением
Содержание
- Двигатель постоянного тока с последовательным возбуждением
- Лабораторная работа № 3. Двигатель постоянного тока последовательного возбуждения
- Проектирование двигателя постоянного тока последовательного возбуждения
- Изучение особенностей двигателя постоянного тока последовательного возбуждения, который представляет собой электрическую машину, преобразующую электрическую энергию постоянного тока в механическую энергию. Ознакомление со схемой внутренних соединений.
- Отправить свою хорошую работу в базу знаний просто.
 Используйте форму, расположенную ниже
Используйте форму, расположенную ниже - Двигатели постоянного тока последовательного и смешанного возбуждения
- ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
- Видео
 Используйте форму, расположенную ниже
Используйте форму, расположенную нижеДвигатель постоянного тока с последовательным возбуждением
Принципиальная электрическая схема включения ДПТ с ПВ представлена на рис.3.1.
Рис. 3.1. Схема электрическая принципиальная включения ДПТ с ПВ.
Уравнения электромеханической характеристики ДПТ с ПВ
Ввиду того, что в ДПТ с ПВ ток обмотки возбуждения равен току в обмотке якоря, в таких двигателях в отличие от ДПТ с НВ проявляются интересные особенности.
Поток возбуждения ДПТ с ПВ связан с током якоря (он же является и током возбуждения) зависимостью, называемой кривой намагничивания, представленной на рис. 3.2.
Как видно зависимость для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ. Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид:
Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид:
Рис. 3.2. Кривая намагничивания ДПТ с ПВ.
Из-за отсутствия точного математического описания кривой намагничивания, при упрощенном анализе можно пренебречь насыщением магнитной системы ДПТ с ПВ, т. е. принять зависимость между потоком и током якоря линейной, как это показано на рис. 3.2 пунктирной линией. В этом случае можно записать:
Для момента ДПТ с ПВ с учетом (3.17) можно записать:
Из выражения (3.3) видно, что в отличие от ДПТ с НВ у ДПТ с ПВ электромагнитный момент зависит от тока якоря не линейно, а квадратично.
Для тока якоря можно в этом случае записать:
Если подставить выражение (3.4) в общее уравнение электромеханической характеристики (3.1), то можно получить уравнение для механической характеристики ДПТ с ПВ:
Отсюда следует, что при ненасыщенной магнитной системе механическая характеристика ДПТ с ПВ изображается (рис.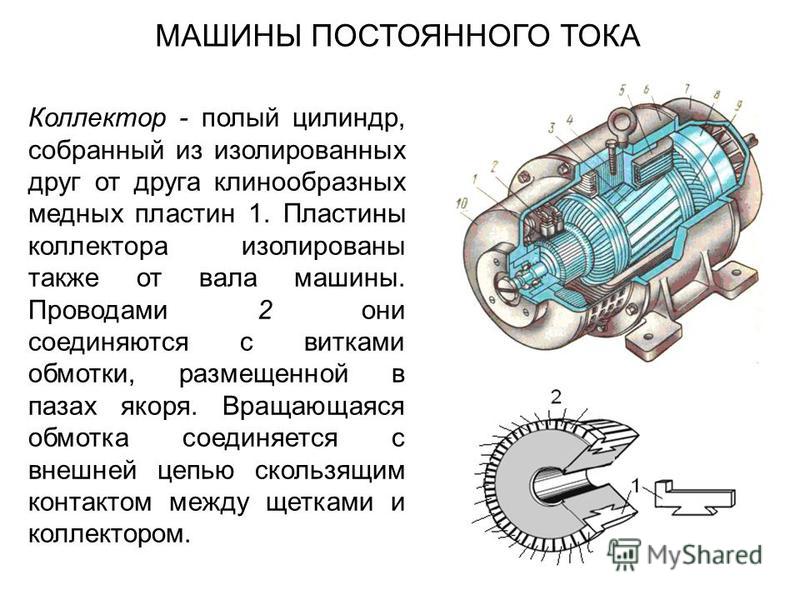 3.3) кривой, для которой ось ординат является асимптотой.
3.3) кривой, для которой ось ординат является асимптотой.
Рис. 3.3. Механическая характеристика ДПТ с ПВ в предположении ненасыщенности его магнитной цепи.
Значительное увеличение скорости вращения двигателя в области малых нагрузок обуславливается соответствующим снижением величины магнитного потока.
Уравнение (3.5) является оценочным, т.к. получено при допущении о ненасыщенности магнитной системы двигателя. На практике по экономическим соображениям электродвигатели рассчитываются с определенным коэффициентом насыщения и рабочие точки лежат в районе колена перегиба кривой намагничивания.
В целом, анализируя уравнение механической характеристики (3.5), можно сделать интегральный вывод о «мягкости» механической характеристики, проявляющейся в резком уменьшении скорости при увеличении момента на валу двигателя.
Если рассматривать механическую характеристику, изображенную на рис. 3.3 в области малых нагрузок на валу, то можно сделать вывод, что понятие скорости идеального холостого хода для ДПТ с ПВ отсутствует, т.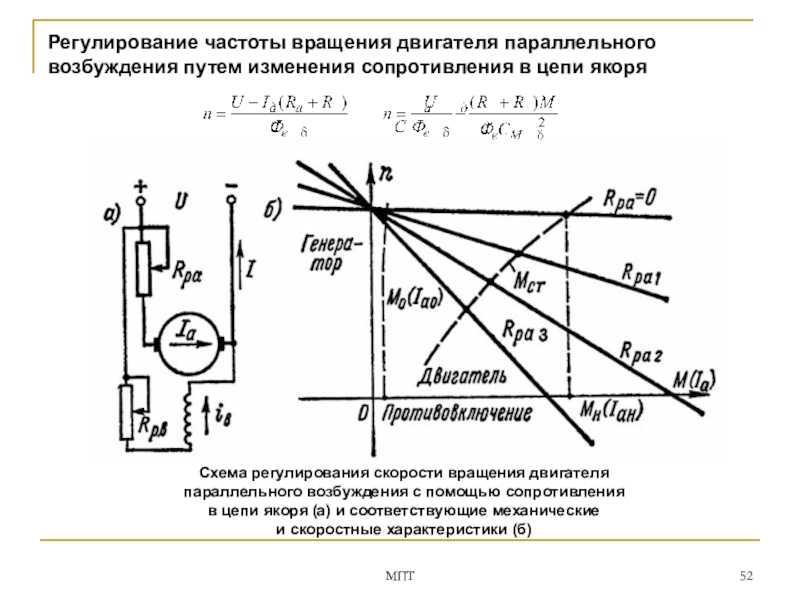 е. при полном сбросе момента сопротивления двигатель идет в «разнос». При этом его скорость теоретически стремится к бесконечности.
е. при полном сбросе момента сопротивления двигатель идет в «разнос». При этом его скорость теоретически стремится к бесконечности.
С увеличением нагрузки скорость вращения падает и равняется нулю при значении момента короткого замыкания (пускового):
Далее скорость вращения асимптотически приближается к значению в 4 квадранте системы координат.
В реальном ДПТ с ПВ вследствие насыщения магнитной системы но мере увеличения нагрузки на валу (а, следовательно, и тока якоря) в области больших моментов, наблюдается прямая пропорциональность между моментом и током, поэтому механическая характеристика становится там практически линейной. Это относится как к естественной, так и к искусственным механическим характеристикам.
Но так как величина незначительна, то может достигать значительных величин. Поэтому у ДПТ с ПВ, как правило, запрещается сбрасывать нагрузку на валу более чем на 80% отноминальной.
Исключением являются микродвигатели, у которых и при полном сбросе нагрузки остаточный момент трения достаточно велик для того, чтобы ограничить скорость холостого хода.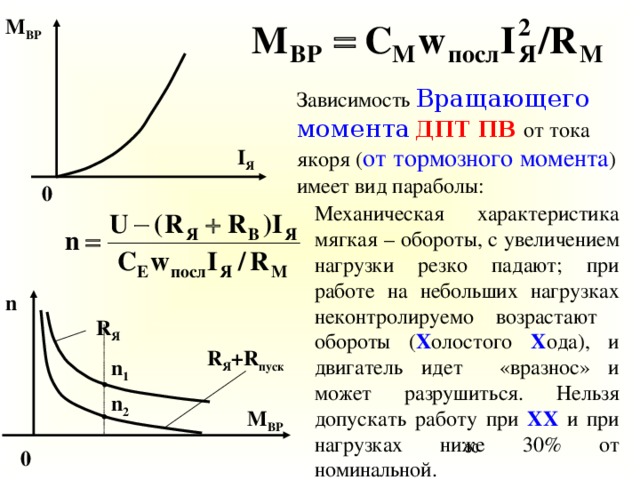 Склонность ДПТ с ПВ идти в «разнос» ведет к тому, что их роторы выполняются механически усиленными.
Склонность ДПТ с ПВ идти в «разнос» ведет к тому, что их роторы выполняются механически усиленными.
Сравнение пусковых свойств двигателей с ПВ и НВ
а у идеализированного ДПТ с ПВ согласно выражению (3.6) квадрату тока якоря;
Из этого следует, что при одинаковой перегрузочной способности пусковой момент ДПТ с ПВ превосходит пусковой момент ДПТ с НВ.
Для микродвигателей обычно осуществляется прямой пуск без добавочные сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск. особенно, если привод с ДПТ с ПВ используется в нагруженных режимах с частыми пусками и торможениями.
Способы регулирования угловой скорости вращения ДПТ с ПВ
Регулирование скорости вращения изменением питающего напряжения
Как следует из выражения механической характеристики (3.1) при изменении питающего напряжения можно получить семейство механические характеристик, изображенных на рис. 3.4. При этом величина напряжения питания регулируется, как правило, при помощи тиристорных преобразователей напряжения или систем «Генератор-двигатель».
Источник
Лабораторная работа № 3. Двигатель постоянного тока последовательного возбуждения
1. Ознакомиться с конструкцией и принципом действия двигателя постоянного тока с последовательной системой возбуждения.
2. Ознакомиться с особенностью пуска двигателя последовательного возбуждения.
3. Ознакомится с особенностью регулирования скорости вращения двигателя.
4. Определить на основании экспериментальных данных основные характеристики двигателя.
Краткие теоретические сведения
У двигателя последовательного возбуждения (сериесного) обмотка якоря и возбуждения соединены последовательно.
Вращающий момент двигателя определяется формулой
При малом насыщении стали магнитопровода магнитный поток Ф прямо пропорционален току якоря (Ф Ia ), поэтому можно считать, что вращающий момент двигателя последовательного возбуждения прямо пропорционален квадрату тока якоря:
Частота вращения двигателя последовательного возбуждения
Рис. 1. Рабочие характеристики двигателя последовательного возбуждения
1. Рабочие характеристики двигателя последовательного возбуждения
Так как при увеличении нагрузки магнитный поток Ф сильно возрастает, то частота вращения двигателя с увеличением нагрузки резко снижается.
Уменьшение нагрузки сопровождается значительным возрастанием частоты вращения двигателя вследствие уменьшения магнитного потока. Поэтому при нагрузке, меньшей 25% номинальной, двигатель пускать в ход нельзя, так как его частота вращения может настолько повыситься, что двигатель пойдет «в разнос» и может быть поврежден. По этой же причине не следует применять ременную передачу для этих двигателей, поскольку при обрыве ремня двигатель также пойдет «в разнос».
Частоту вращения в двигателях последовательного возбуждения можно регулировать следующими способами: посредством ослабления поля; шунтированием обмотки якоря; включением сопротивления в цепь якоря; изменением подводимого напряжения.
При регулировании частоты вращения путем ослабления поля производится шунтирование обмотки возбуждения некоторым сопротивлением RШВ, или изменением числа витков обмотки возбуждения.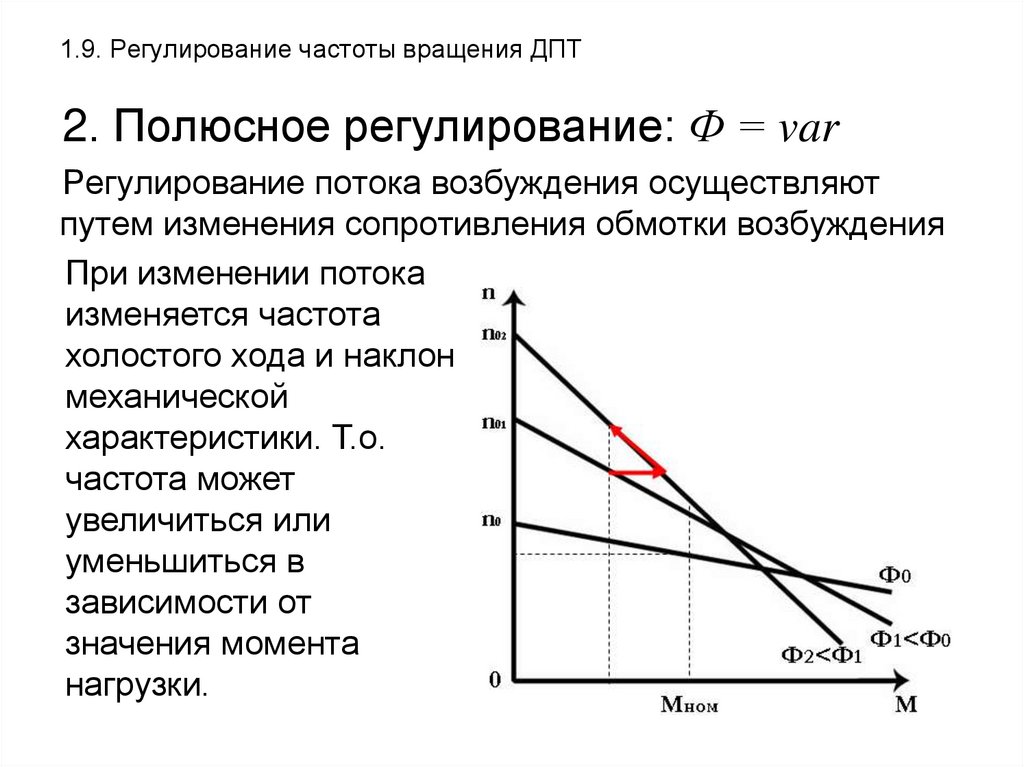 В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения. С изменением шунтирующего сопротивления ток возбуждения уменьшится, а частота вращения, соответственно, увеличится.
В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения. С изменением шунтирующего сопротивления ток возбуждения уменьшится, а частота вращения, соответственно, увеличится.
В случаи регулирования частоты вращения путем шунтирования якоря Rшя ток и поток возбуждения возрастают, а частота уменьшается. Обычно шунтирование якоря эффективно только тогда, когда магнитная цепь не насыщена, в связи с чем этот метод на практике используется редко.
Способ регулирования частоты вращения включением сопротивления в цепь якоря позволяет изменить частоту вращения вниз от номинального значения. Но при этом значительно уменьшается кпд, в связи с чем этот способ находит ограниченное применение.
Изменением подводимого напряжения регулировать частоту вращения можно вниз от номинального значения с сохранением высокого кпд.
2. Описание лабораторной установки
Принципиальная схема испытательного стенда приведена на рис.2.
Питание от сети переменного тока на стенд подается включением рубильника П1. Параллельно рубильнику подключен однофазный регулятор напряжения РНО. С целью выпрямления переменного напряжения в постоянное используется диодный мост Д, который подключается к РНО при помощи магнитного пускателя К1. Питание на его катушку К1 подается от рубильника П1 после нажатия нажимного кнопочного выключателя ПК1, при этом пускатель срабатывает, и его силовые контакты К1, включенные последовательно с выпрямительным мостом Д, замыкаются. Для отключения выпрямительного моста и, соответственно, регулятора напряжения РНО, используется кнопка СК1.
Параллельно рубильнику подключен однофазный регулятор напряжения РНО. С целью выпрямления переменного напряжения в постоянное используется диодный мост Д, который подключается к РНО при помощи магнитного пускателя К1. Питание на его катушку К1 подается от рубильника П1 после нажатия нажимного кнопочного выключателя ПК1, при этом пускатель срабатывает, и его силовые контакты К1, включенные последовательно с выпрямительным мостом Д, замыкаются. Для отключения выпрямительного моста и, соответственно, регулятора напряжения РНО, используется кнопка СК1.
Измерение частоты вращения осуществляется специальным датчиком скорости вращения, состоящим из тахогенератора переменного тока и вольтметра, отградуированного в об/мин.
Рис. 2. Схема стенда для испытания двигателя с последовательным возбуждением
В качестве нагрузки двигателя применяется электромагнитный тормоз ЭМТ, который состоит из проводящего стального диска (Д), жестко закрепленного на валу испытуемого двигателя, магнитной системы с обмоткой возбуждения тормоза (ОВТ) и уравновешивающего груза. Магнитная система, обмотка возбуждения, груз и указатель расположены на подшипниках, установленных на станине, причем обмотка ОВТ питается постоянным током. Для регулирования величины тока обмотки возбуждения ЭМТ используется потенциометр R. Принцип действия ЭМТ сводится к следующему. Магнитное поле, созданное обмоткой возбуждения, пересекает вращающейся диск тормоза и в нем индуцируются вихревые токи. Эти токи, вступая во взаимодействие с полем возбуждения тормоза, создают тормозной момент, приводящий к повороту магнитной системы ЭМТ и указателя, показывающего величину момента в кгм. Изменяя величину тока, протекающего по обмотке возбуждения ОВТ тормоза, изменяют нагрузочный (тормозной) момент на валу двигателя.
Магнитная система, обмотка возбуждения, груз и указатель расположены на подшипниках, установленных на станине, причем обмотка ОВТ питается постоянным током. Для регулирования величины тока обмотки возбуждения ЭМТ используется потенциометр R. Принцип действия ЭМТ сводится к следующему. Магнитное поле, созданное обмоткой возбуждения, пересекает вращающейся диск тормоза и в нем индуцируются вихревые токи. Эти токи, вступая во взаимодействие с полем возбуждения тормоза, создают тормозной момент, приводящий к повороту магнитной системы ЭМТ и указателя, показывающего величину момента в кгм. Изменяя величину тока, протекающего по обмотке возбуждения ОВТ тормоза, изменяют нагрузочный (тормозной) момент на валу двигателя.
3. Лабораторное задание
1. Ознакомится с конструкцией и паспортными данными испытываемого двигателя, со схемой испытательного стенда.
2. Осуществить пуск двигателя.
4. Снять механические характеристики двигателя n = f(I) при U=UH=const; IB= IBH и IB=0,75 IBH.
5. Снять регулировочную характеристику двигателя IB = f( Iа ) при
а) при шунтировании обмотки возбуждения регулированием реостата Rшв.
б) при шунтировании обмотки якоря реостатом RшЯ.
4. Порядок выполнения работы
Пункт 2. Пуск двигателя необходимо осуществлять при пониженном напряжении. Схема стенда позволяет ограничивать пусковой ток только уменьшением напряжения. Поэтому, включив рубильник П1, необходимо нажать кнопку ПК1, установить по вольтметру V1 регулятором РНО напряжение, примерно в пять раз меньше номинального. Затем включить кнопку ПК2 и, вращая регулятор РНО, разогнать двигатель до желаемой скорости. Необходимо помнить, что пуск двигателя последовательного возбуждения в режиме холостого хода, т.е. без нагрузки, не допустим. Поэтому перед пуском необходимо установить нагрузку на валу двигателя Р2 = 0,25 Рн, т.е. нельзя осуществлять пуск двигателя при отключенном тормозе.
Пункт 3. При снятии рабочих характеристик необходимо после пуска двигателя установить регулятором напряжения РНО номинальное напряжение двигателя, которое измеряется вольтметром V1.
Изменяя потенциометром R в цепи ЭМТ ток возбуждения в ОВТ, изменяют величину тормозного момента на валу двигателя. Рекомендуется производить 5?7 измерений при различных значениях нагрузки. Для каждого нагрузочного момента необходимо замерить скорость вращения n по тахометру; ток якоря I по амперметру А1 и момент М по шкале ЭМТ. Напряжение в течение опыта поддерживают постоянным при помощи регулятора РНО.
Пункт 4. Механическая характеристика при IB = IBH строится на основании экспериментальных данных рабочих характеристик. Снятие механической характеристики при IB = 0,75 IBH производится при помощи реостата Rшв, который подключатся выключателем В1. Ток возбуждения измеряют по амперметру А2, ток якоря по амперметру А1, частоту вращения по тахометру n. Напряжение в течение опыта поддерживают постоянным.
Напряжение в течение опыта поддерживают постоянным.
5. Обработка экспериментальных данных
Пункт 3. Потребляемая мощность двигателя последовательного возбуждения
Момент, определяемый по шкале ЭМТ, измеряется в кгм. Для того, чтобы перевести его в Нм, необходимо полученную величину умножить на 9,81.
Частота вращения переводится в угловую частоту вращения следующим образом (1/с) =n (об/мин) 0,105
полезная мощность двигателя
КПД рассчитывается по выражению = Р2 / Р1 100%
Отчет по данной лабораторной работе должен содержать:
2. Тип и номинальные данные испытуемого двигателя постоянного тока последовательного возбуждения.
3. Таблицу 1 с данными рабочих характеристик:
Источник
Проектирование двигателя постоянного тока последовательного возбуждения
Изучение особенностей двигателя постоянного тока последовательного возбуждения, который представляет собой электрическую машину, преобразующую электрическую энергию постоянного тока в механическую энергию.
| Рубрика | Производство и технологии |
| Вид | курсовая работа |
| Язык | русский |
| Дата добавления | 13.05.2016 |
| Размер файла | 822,8 K |
Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
ДЕПАРТАМЕНТ образования КИРОВСКОЙ ОБЛАСТИ
Кировское областное государственное
Образовательное бюджетное учреждение
Среднего профессионального образования
«Кировский авиационный техникум»
Дисциплина: «Основы проектирования электротехнических изд е лий»
Тема: «Проектирование двигателя п о стоянного тока последовательного возбужде ния »
Автор: Студент 3 курса группы Э-31
Специальность 140446 Электрические машины и аппараты
Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину, преобразующую электрическую энергию постоянного тока в механическую энергию, в которой обмотка возбуждения подключена последов а тельно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен т о ку в обмотке возбуждения, что является его главной отличител ь ной особенностью от остальных типов двигателей.
Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен т о ку в обмотке возбуждения, что является его главной отличител ь ной особенностью от остальных типов двигателей.
1. Назчение и область применения
Предназначен для привода кранов топливных, гидравлических, пневматических систем на летательных аппаратах.
2. Технические данные
Номинальная мощность— 8 Вт
Номинальное напряжение-27 В
Частота вращения-18000 об./мин
Режим работы-S3 (Периодический повторно-кратковременный режим работы)
Способ монтажа- IM9001 (9-машина на лапах с подшипниковыми щитами; 00-машина устанавливается выходным концом вала влево; 1-имеет один цилиндрический конец вала)
Способ охлаждения-IC0041 (Отсутствует внешний вентилятор)
Условия эксплуатации-УХЛ3 (эксплуатация в помещениях, где к о лебания температуры и влажности воздуха существенно меньше, чем на открытом воздухе, рабочая температура окружающей с реды от минус 45 оС до плюс 40 С. )
)
3. Схема внутренних соединений
4. Конструкция двигателя
Электродвигатель состоит из следующих основных узлов: кор пуса, подшипниковых щитов, якоря и электромагнитной муфты торможения.
Внутри корпуса размещены два кованых полюса с катуш ками возбуждения, обмотка которых изготовлена из ме д ного провода круглого сечения. Для повышения сопроти в ления изоляции и обеспечения влагостойкости катушки пропитаны лаком, а доступные части промазаны эмалью. Корпус и полюса, совместно с якорем, образуют совм е щенную магнитную систему электродвигателя.
Якорь состоит из сердечника, набранного из листов элек тротехнической стали и напрессованного на стальной вал. В пазах якоря размещена петлевая обмотка, концы секций которой впаяны в петушки коллектора. Коллектор состоит из 14 коллекторных пластин (ламелей) специального профиля, изолированных друг от друга прокладками из мик а нита. Ламели имеют форму ласточкиного хвоста и опрессованы пластмассой. Для защиты от распушения на лобовую часть обмотки со стороны коллектора наложен ба н даж из стеклянной нити. Электроизоляционный свойства обмотки якоря, а также ее монолитность достигается пропиткой якоря лаком. Вал якоря вращается в двух шарик о подшипниках. Подшипник со стороны привода является коренным, он насажен на вал, а в корпусе двигателя з а креплен фланец, препятствующий осевому перемещению подшипника. Второй подшипник- плавающий, и имеет возможность перемещаться в осевом направлении при температурных изменениях ротора. Чтобы магнитный п о ток не замыкался на валу, вал выполнен из немагнитной стали 36НХТЮ. Со стороны привода на валу насажен то р мозной диск, который жестко закреплен при помощи шпонки и гайки. двигатель ток электрический
Электроизоляционный свойства обмотки якоря, а также ее монолитность достигается пропиткой якоря лаком. Вал якоря вращается в двух шарик о подшипниках. Подшипник со стороны привода является коренным, он насажен на вал, а в корпусе двигателя з а креплен фланец, препятствующий осевому перемещению подшипника. Второй подшипник- плавающий, и имеет возможность перемещаться в осевом направлении при температурных изменениях ротора. Чтобы магнитный п о ток не замыкался на валу, вал выполнен из немагнитной стали 36НХТЮ. Со стороны привода на валу насажен то р мозной диск, который жестко закреплен при помощи шпонки и гайки. двигатель ток электрический
Для создания тормозного момента, в тормозной диск упирается подпружиненный четырьмя пружинами якорь муфты торможения, который насажен на три стальных ролика; они удерживают якорь муфты от вращения и позв о ляют перемещаться под воздействием магнитного потока. Величина воздушного зазора между якорем муфты и корпусом регулируется путем подбора шайб, которые уст а навливают между тормозным диском и подшипником.
5. Электромагнитный расчёт
5.1 Расчёт главных размеров
Источник
Двигатели постоянного тока последовательного и смешанного возбуждения
В двигателе последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря (рис. 7.33, а), поэтому магнитный поток Ф пропорционален току I (если пренебречь насыщением магнитопровода), и в формуле М = см /Ф следует положить Ф = И, где k — постоянный коэффициент.
Вращающий момент двигателя последовательного возбуждения пропорционален квадрату силы тока.
Выразим магнитный поток через вращающий момент:
и подставим в приближенное выражение скорости вращения двигателя:
Отсюда очевидно, что для двигателя последовательного возбуждения опасен режим холостого хода, так как при уменьшении момента на валу до нуля скорость вращения неограниченно увеличивается (рис. 7.33, б), двигатель идет «вразнос». Это обстоятельство требует такого сочленения двигателя последовательного возбуждения с рабочей машиной, при котором режим холостого хода был бы исключен. В частности, нельзя применять ременную передачу, так как при ослаблении или обрыве ремня может возникнуть аварийный режим.
Это обстоятельство требует такого сочленения двигателя последовательного возбуждения с рабочей машиной, при котором режим холостого хода был бы исключен. В частности, нельзя применять ременную передачу, так как при ослаблении или обрыве ремня может возникнуть аварийный режим.
Скорость вращения двигателя последовательного возбуждения можно регулировать либо изменением подводимого напряжения U (рис. 7.34, а), либо изменением магнитного потока возбуждения Ф за счет шунтирования обмотки возбуждения (рис. 7.34, б). Второй способ более экономичен.
Двигатель последовательного возбуждения имеет существенные преимущества благодаря квадратичной зависимости вращающего момента от тока. Так, например, он развивает большой пусковой момент, что очень важно для электропривода на транспорте (благодаря этому электропоезд способен быстро набирать скорость после остановки). Однако резко выраженная зависимость скорости вращения от нагрузки и опасность «разноса» ограничивают область применения этих двигателей.
Указанных недостатков лишены двигатели смешанного возбуждения (рис. 7.35).
Характеристики этих двигателей являются промежуточными между характеристиками двигателей параллельного и последовательного возбуждения.
При согласном включении последовательной и параллельной обмоток возбуждения двигатель смешанного возбуждения имеет больший пусковой момент по сравнению с шунтовым двигателем. При встречном включении обмоток возбуждения двигатель приобретает жесткую механическую характеристику. С увеличением нагрузки магнитный поток сериесной обмотки увеличивается и, вычитаясь из потока шунтовой обмотки, уменьшает общий поток возбуждения. При этом скорость вращения двигателя не только не уменьшается, а может даже увеличиваться (рис. 7.36). И в том и в другом случае наличие магнитного потока шунтовой обмотки исключает режим «разноса» двигателя при снятии нагрузки.
Регулирование скорости вращения двигателя смешанного возбуждения осуществляют регулировочным реостатом в цепи шунговой обмотки.
Двигатели смешанного возбуждения применяются в качестве тяговых и крановых двигателей, а также для привода прокатных станов, компрессоров, насосов.
Двигатели постоянного тока последовательного и смешанного возбуждения
Как изменится вращающий момент двигателя последовательного возбуждения, если его ток увеличился в 3 раза (насыщением магнитопровода пренебречь)?
Увеличится в 3 раза
Увеличится в 9 раз
Во сколько раз пусковой момент двигателя последова- тельного возбуждения больше номинального момента, если пусковой ток превышает номинальный в 5 раз (насыщением магнитопровода пренебречь)?
Что произойдет, если двигатель последовательного возбуждения подключить к сети при отклю- чснной механической нагрузке на валу?
Двигатель не запустится
Обмотка якоря перегреется
Двигатель пойдет «вразнос»
Как изменится скорость вращения двигателя при увеличении сопротивления R?
Продолжение карт. №7.17
Какая кривая является рабочей характеристикой двигателя смешанного возбуждения:
Источник
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
В рассматриваемых двигателях обмотка возбуждения выполняется с малым числом витков, но рассчитана на большие токи. Все особенности этих двигателей связаны с тем, что обмотка возбуждения включается (см. рис. 5.2,в) последовательно с обмоткой якоря, в результате чего ток возбуждения равен току якоря и создаваемый поток Ф пропорционален току якоря:
Все особенности этих двигателей связаны с тем, что обмотка возбуждения включается (см. рис. 5.2,в) последовательно с обмоткой якоря, в результате чего ток возбуждения равен току якоря и создаваемый поток Ф пропорционален току якоря:
где а =/(/я) — нелинейный коэффициент (рис. 5.12).
Рис. 5.12. Характеристика намагничивания двигателя постоянного тока последовательного возбуждения
Основные уравнения двигателя последовательного возбуждения в отличие от уравнений двигателей независимого возбуждения нелинейны, что связано, в первую очередь, с произведением переменных:
При изменении тока в якорной цепи изменяется магнитный поток Ф, наводя в массивных частях магнитопровода машины вихревые токи. Влияние вихревых токов может быть учтено в модели двигателя в виде эквивалентного короткозамкнутого контура, описываемого уравнением
а уравнение для цепи якоря имеет вид:
где wB, wB т — число витков обмотки возбуждения и эквивалентное число витков вихревых токов.
В установившемся режиме
Из (5.22) и (5.26) получим выражения для механической и электромеханической характеристик двигателя постоянного тока последовательного возбуждения:
В первом приближении механическую характеристику двигателя последовательного возбуждения, без учета насыщения магнитной цепи, можно представить в виде гиперболы, не пересекающей ось ординат. Если положить Ля ц = /?я + /?в = 0, то характеристика не будет пересекать и ось абсцисс. Такую характеристику называют идеальной. Реальная естественная характеристика двигателя пересекает ось абсцисс и вследствие насыщения магнитопровода при моментах больше Мн спрямляется (рис. 5.13).
Рис. 5.13. Механические характеристики двигателя последовательного возбуждения
Характерной особенностью характеристик двигателя последовательного возбуждения является отсутствие точки идеального холостого хода. При уменьшении нагрузки скорость возрастает, что может привести к неконтролируемому разгону двигателя. Оставлять такой двигатель без нагрузки нельзя.
При уменьшении нагрузки скорость возрастает, что может привести к неконтролируемому разгону двигателя. Оставлять такой двигатель без нагрузки нельзя.
Важным достоинством двигателей последовательного возбуждения является большая перегрузочная способность на низких скоростях. При перегрузке по току в 2—2,5 раза двигатель развивает момент 3,0. 3,5Мн. Это обстоятельство определило широкое использование двигателей последовательного возбуждения в качестве привода электрических транспортных средств, для которых максимальные моменты необходимы при трогании с места.
Изменение направления вращения двигателей последовательного возбуждения не может быть достигнуто изменением полярности питания цепи якоря. В двигателях последовательного возбуждения при реверсировании нужно изменять направление тока в одной части якорной цепи: либо в обмотке якоря, либо в обмотке возбуждения (рис. 5.14).
Рис. 5.14. Схема реверсирования двигателя постоянного тока последовательного возбуждения
Искусственные механические характеристики для регулирования скорости и момента могут быть получены тремя способами:
Рис. 5.15. Реостатные механические характеристики двигателя последовательного возбуждения: /?1до —Riao —сопротивления ступеней добавочного резистора в цепи якоря
5.15. Реостатные механические характеристики двигателя последовательного возбуждения: /?1до —Riao —сопротивления ступеней добавочного резистора в цепи якоря
Наиболее экономичным способом регулирования скорости двигателя последовательного возбуждения является изменение питающего напряжения. Механические характеристики двигателя смещаются вниз параллельно естественной характеристике (рис. 5.16). По форме эти характеристики подобны реостатным механическим характеристикам (см. рис. 5.15), однако, существует принципиальная разница — при регулировании изменением напряжения отсутствуют потери в добавочных резисторах и регулирование производится плавно.
Рис. 5.1 Б. Механические характеристики двигателя последовательного возбуждения при изменении напряжения питания
Двигатели последовательного возбуждения при использовании в качестве привода мобильных агрегатов во многих случаях получают питание от контактной сети или других источников питания с постоянным значением напряжения, подаваемого на двигатель, в этом случае регулирование производится посредством широтно-импульсного регулятора напряжения (см.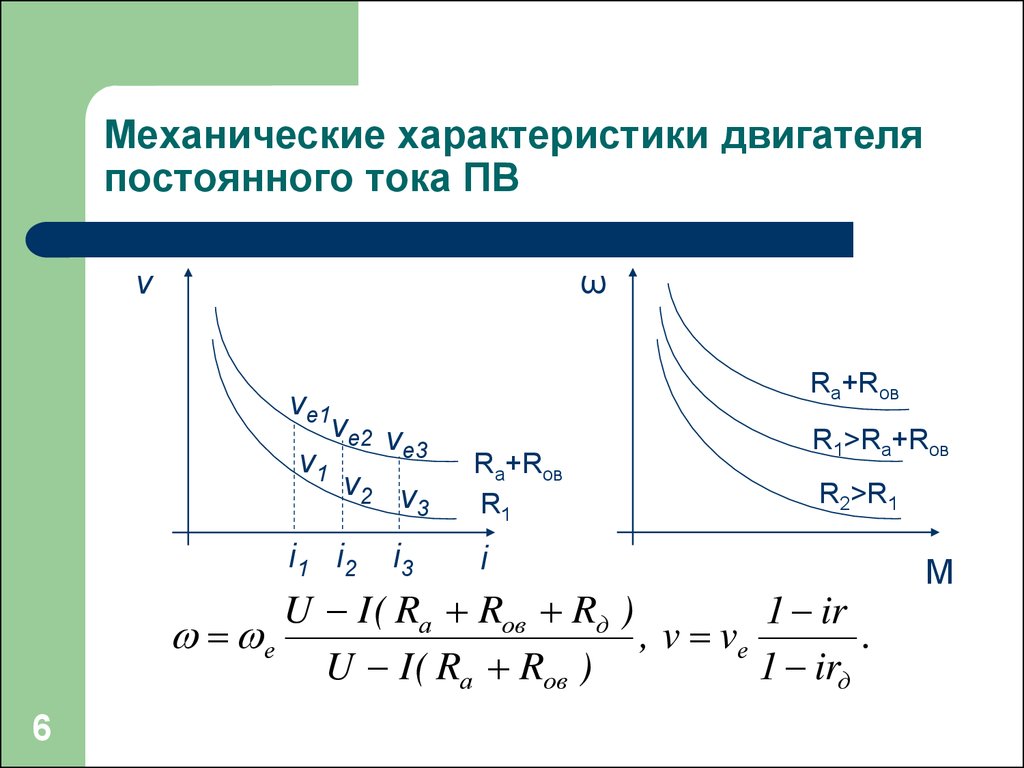 § 3.4). Такая схема показана на рис. 5.17.
§ 3.4). Такая схема показана на рис. 5.17.
Рис. 5.17. Схема регулируемого электропривода с двигателем последовательного возбуждения и широтно-импульсным регулятором напряжения
Независимое регулирование потока возбуждения двигателя последовательного возбуждения возможно, если зашунтировать обмотку якоря сопротивлением (рис. 5.18,а). В этом случае ток возбуждения в = я + / ш, т.е. содержит постоянную составляющую, не зависящую от нагрузки двигателя. При этом двигатель приобретает свойства двигателя смешанного возбуждения. Механические характеристики (рис. 5.18,6) приобретают большую жесткость и пересекают ось ординат, что позволяет получить устойчивую пониженную скорость при малых нагрузках на валу двигателя. Существенный недостаток схемы — это большие потери энергии в шунтирующем сопротивлении.
Рис. 5.18. Схема (а) и механические характеристики (б) двигателя последовательного возбуждения при шунтировании обмотки якоря
Для двигателей постоянного тока с последовательным возбуждением характерны два тормозных режима: динамического торможения и противовключения.
Режим динамического торможения возможен в двух случаях. В первом — якорная обмотка замыкается на сопротивление, а обмотка возбуждения питается от сети или другого источника через добавочное сопротивление. Характеристики двигателя в этом случае подобны характеристикам двигателя независимого возбуждения в режиме динамического торможения, (см. рис. 5.9).
Во втором случае, схема которого показана на рис. 5.19, двигатель при отключении контактов КМ и замыкании контактов КВ работает как генератор с самовозбуждением. При переходе из двигательного режима в тормозной необходимо сохранить направление тока в обмотке возбуждения во избежание размагничивания машины, так как при этом машина переходит в режим самовозбуждения. Механические характеристики такого режима представлены на рис. 5.20. Существует граничная скорость соф, ниже которой самовозбуждение машины не происходит.
Рис.5.19. Схема динамического торможения двигателя последовательного возбуждения
Рис. 5.20. Механические характеристики двигателя последовательного возбуждения в режиме динамического торможения с самовозбуждением
5.20. Механические характеристики двигателя последовательного возбуждения в режиме динамического торможения с самовозбуждением
В режиме противовключения в цепь якоря включают добавочное сопротивление. На рис. 5.21 приведены механические характеристики двигателя для двух вариантов противовключения. Характеристика 1 получается, если при работе двигателя в направлении «вперед» В (точка с) изменить направление тока в обмотке возбуждения и ввести в цепь якоря добавочное сопротивление. Двигатель переходит в режим противовключения (точка а) с тормозным моментом Мторм.
Рис.5.21. Механические характеристики двигателя последовательного возбуждения в режиме противовключения
Если привод работает в режиме спуска груза, когда задача привода подтормаживать механизм подъема при работе в направлении «назад» Н, то двигатель включают в направлении «вперед» В, но с большим добавочным сопротивлением в цепи якоря.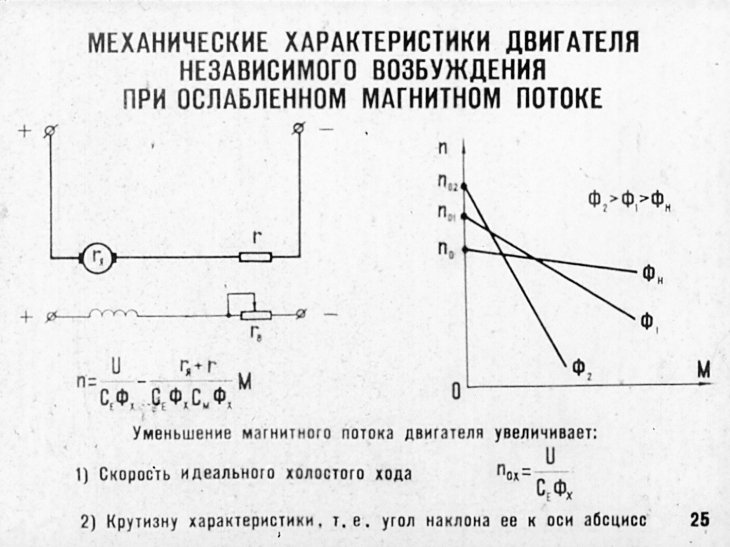 Работе привода соответствует точка b на механической характеристике 2. Работа в режиме противовключения сопряжена с большими потерями энергии.
Работе привода соответствует точка b на механической характеристике 2. Работа в режиме противовключения сопряжена с большими потерями энергии.
Динамические характеристики двигателя постоянного тока последовательного возбуждения описывает система уравнений, вытекающих из (5.22), (5.23), (5.25) при переходе к операторной форме записи:
В структурной схеме (рис. 5.22) коэффициент а = Д/я) отражает кривую насыщения машины (см. рис. 5.12). Влиянием вихревых токов пренебрегаем.
Рис. 5.22. Структурная динамическая схема двигателя постоянного тока последовательного возбуждения
Определить передаточные функции двигателя последовательного возбуждения аналитическим путем достаточно сложно, поэтому анализ переходных процессов производят методом компьютерного моделирования на основе схемы, приведенной на рис. 5.22.
Двигатели постоянного тока смешанного возбуждения имеют две обмотки возбуждения: независимую и последовательную. Вследствие этого их статические и динамические характеристики сочетают характерные свойства двух рассматриваемых ранее видов двигателей постоянного тока. К какому из видов больше принадлежит тот или иной двигатель смешанного возбуждения зависит от соотношения намагничивающих сил, создаваемых каждой из обмоток: в/ п.в = в / п.в я> где в’ п.в — число витков обмотки независимого и последовательного возбуждения.
Вследствие этого их статические и динамические характеристики сочетают характерные свойства двух рассматриваемых ранее видов двигателей постоянного тока. К какому из видов больше принадлежит тот или иной двигатель смешанного возбуждения зависит от соотношения намагничивающих сил, создаваемых каждой из обмоток: в/ п.в = в / п.в я> где в’ п.в — число витков обмотки независимого и последовательного возбуждения.
Исходные уравнения двигателя смешанного возбуждения:
где /в, RB, wb — ток, сопротивление и число витков обмотки независимого возбуждения; Lm — взаимная индуктивность обмоток возбуждения.
Уравнения установившегося режима:
Откуда уравнение электромеханической характеристики можно записать в виде:
В большинстве случаев обмотка последовательного возбуждения выполняется на 30. 40% МД С, тогда скорость идеального холостого хода превышает номинальную скорость двигателя примерно в 1,5 раза.
Источник
Видео
Схема двигателя постоянного тока. Устройство и принцип работы.
Электродвигатель постоянного тока. Принцип работы.
Электрические машины, часть 8. Двигатели постоянного тока.
Исследование генератора постоянного тока параллельного возбуждения
Способы возбуждения электрических машин постоянного тока
Получение структурной схемы двигателя постоянного тока с независимым возбуждением
Регулирование частоты вращения двигателей постоянного тока
Пуск двигателей постоянного тока
Электродвигатели постоянного тока
Характиристики машин постоянного тока
Электродвигатели постоянного тока серии 4ПН200 -4ПН280
Купить Электродвигатели постоянного тока серии 4ПН200 -4ПН280
Электродвигатели постоянного тока общепромышленные с нормальными регулировочными свойствами
Технические данные электродвигателей постоянного тока серии 4ПН200 – 4ПН 280 Электродвигатели постоянного тока серии 4ПН200 – 4ПН280 изготавливаются для поставок внутри страны и на экспорт и соответствуют требованиям ГОСТ 183-74 и техническим условиям ТУ16-88 ИНЦЯ527.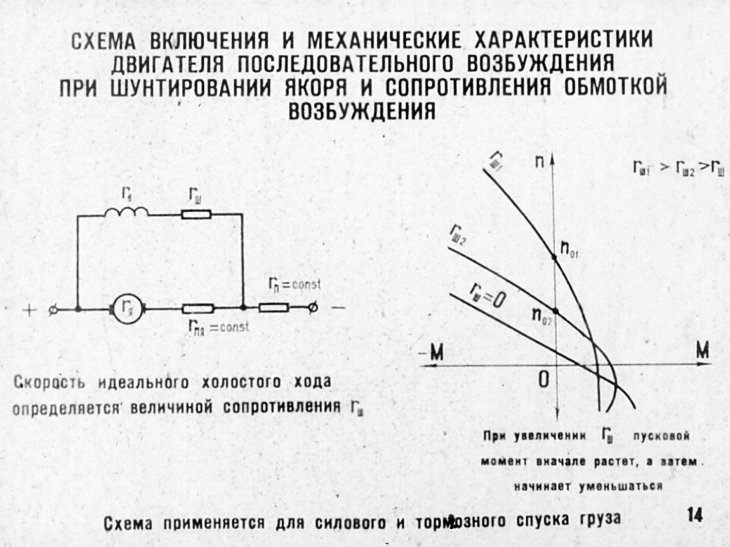 214–003ТУ, ТУ16-88 ИЖВЕ 527.000.004Т и ТУ 16–527.317-85 (ИЖДЦ 527.412.007ТУ). Основные технические данные приведены в таблице 1.
214–003ТУ, ТУ16-88 ИЖВЕ 527.000.004Т и ТУ 16–527.317-85 (ИЖДЦ 527.412.007ТУ). Основные технические данные приведены в таблице 1.
Номинальный режим работы электродвигателей – продолжительный (S1) по ГОСТ 183-74. Электродвигатели допускают работу в режимах S2 – S8 по ГОСТ 183-74, при этом среднеквадратичный ток якоря за цикл не должен превышать номинальный. Регулирование частоты вращения электродвигателей от нуля до основной производится изменением подводимого напряжения, а от основной до максимальной – током возбуждения.
Устойчивость работы электродвигателей с независимым возбуждением, а также исключение появления на обмотке возбуждения напряжений более 600 В обеспечивается схемой управления электродвигателями. Направление вращения электродвигателей с независимым возбуждением – реверсивное.
Степень искрения на коллекторе машин под сбегающим краем щетки при номинальной нагрузке в диапазоне рабочих частот вращения и коэффициенте пульсации тока не более 15 % не превышает 11/2 по ГОСТ 183-74. Степень искрения при перегрузках и в переходных режимах не оговаривается, коллектор и щетки при этом должны быть в состоянии, пригодном для эксплуатации.
Степень искрения при перегрузках и в переходных режимах не оговаривается, коллектор и щетки при этом должны быть в состоянии, пригодном для эксплуатации.
Средний уровень звука электродвигателей при номинальной частоте вращения соответствует классу 2 по ГОСТ 16372-84. Уровень вибрации по ГОСТ 16921-83 категории R и N.
Таблица 1, Параметры электродвигателей постоянного тока серии 4ПН200 – 4ПН280
| Tип электродвигателя | Мощность, кВт | Напряжение, В | Ток, А | Частота вращения, об/мин | КПД % |
| электродвигатель 4ПН200S | 8,5 | 220 | 44,5 | 800/2500 | 82,0 |
| 13,0 | 110 | 135 | 1120/3500 | 84,0 | |
| 13,0 | 220 | 67 | 1120/3000 | 85,0 | |
| 22,0 | 220 | 111 | 1500/3500 | 87,5 | |
| 22,0 | 440 | 55,6 | 1500/3500 | 87,5 | |
| 36,0 | 220 | 181 | 2200/3500 | 88,5 | |
| 60 | 440 | 149 | 3150/3500 | 90,5 | |
| электродвигатель 4П200М | 11,0 | 110 | 115 | 800/3000 | 83,0 |
| 11,0 | 220 | 57 | 800/2500 | 84,0 | |
| 16,0 | 220 | 82 | 1000/2000 | 86,0 | |
| 16,0 | 440 | 41 | 1000/2500 | 86,0 | |
| 30,0 | 220 | 150 | 1500/3500 | 88,5 | |
| 30,0 | 440 | 74,5 | 1600/3500 | 89,5 | |
| 53,0 | 440 | 131 | 2360/3500 | 90,5 | |
| 75,0 | 440 | 184 | 3150/3500 | 91,5 | |
| электродвигатель 4ПН225S | 8,5 | 220 | 46 | 500/1800 | 77,0 |
| 12,5 | 220 | 69 | 600/2100 | 79,5 | |
| 16,0 | 220 | 84 | 750/2500 | 80,5 | |
| 22,0 | 220 | 118 | 1000/2500 | 82,5 | |
| 22,0 | 440 | 58 | 1000 | 83,5 | |
| 37,0 | 220 | 189 | 1500/3000 | 86,5 | |
| 37,0 | 440 | 94,0 | 1500/1850 | 86,5 | |
| электродвигатель 4ПН225М | 15,0 | 220 | 80 | 600/2100 | 79,0 |
| 20,0 | 220 | 105 | 750/2500 | 83,0 | |
| 20,0 | 440 | 54 | 750/1500 | 83,0 | |
| 32,0 | 220 | 164 | 1060/2500 | 85,0 | |
| 32,0 | 440 | 82 | 1060/2250 | 84,5 | |
| 48,0 | 220 | 244 | 1500/3000 | 87,3 | |
| электродвигатель 4ПН250S | 16,0 | 220 | 90 | 530/1500 | 80,0 |
| 20,0 | 220 | 108,0 | 630/2100 | 80,5 | |
| 24,0 | 220 | 124,0 | 750/2000 | 82,0 | |
| 40,0 | 220 | 205 | 1060/2500 | 85,0 | |
| 40,0 | 440 | 104 | 1060/2500 | 85,0 | |
| 50,0 | 440 | 130 | 1500/1800 | 87,0 | |
| 60,0 | 220 | 306 | 1500/2800 | 87,1 | |
| 60,0 | 440 | 155 | 1700/2800 | 87,0 | |
| электродвигатель 4ПН250М | 24,0 | 220 | 125 | 600/2100 | 82,0 |
| 32,0 | 220 | 165 | 750/2000 | 84,0 | |
| 48,0 | 220 | 248 | 1000/2500 | 85,5 | |
| 48,0 | 440 | 125 | 1000/1500 | 86,0 | |
| 71,0 | 440 | 180 | 1500/2800 | 88,5 | |
| 80,0 | 220 | 402 | 1500/2800 | 89,5 | |
| электродвигатель 4ПН280S | 24,0 | 220 | 122 | 530/1250 | 84,0 |
| 34,0 | 220 | 175 | 600/1500 | 84,5 | |
| 45,0 | 220 | 230 | 750/2000 | 87,0 | |
| 75,0 | 220 | 378 | 1000/2250 | 88,5 | |
| 80,0 | 440 | 202 | 1180/2400 | 88,5 | |
| 110,0 | 220 | 548 | 1500/2600 | 89,5 | |
| 110,0 | 440 | 272 | 1500/2250 | 89,0 | |
| электродвигатель 4ПН280М | 27,0 | 220 | 140,5 | 1600/3500 | 87,5 |
| 27,0 | 440 | 69,8 | 1600/3500 | 88,0 | |
| 30,0 | 440 | 77 | 500/1250 | 83,5 | |
| 37,0 | 440 | 93,5 | 2200/3500 | 90,0 | |
| 45,0 | 440 | 113 | 3000/3500 | 90,5 | |
| 55,0 | 220 | 280 | 750/2000 | 87,3 | |
| 85,0 | 440 | 212 | 1000/2250 | 88,4 | |
| 132,0 | 440 | 325 | 1500/1900 | 92,0 | |
| 132,0 | 220 | 653 | 1500/2600 | 90,4 |
Структура условного обозначения электродвигателя 4ПХМС: ХХХХХХХХ4П – серия Н – защищенное с самовентиляцией IP23 ICO1; ХХХ – высота оси вращения; Х – условная длина корпуса по МЭК 72-1; Х – условная длина сердечника якоря (1 – первая длина; 2 – вторая длина). Отсутствие цифры означает совпадение количества длины якорей и корпусов; Х – наличие тахогенератора: Г – с тахогенератором; отсутствие буквы – без тахогенератора; ХХ – климатическое исполнение и категория размещения по ГОСТ 15150-69 и ГОСТ 15543-70.
Отсутствие цифры означает совпадение количества длины якорей и корпусов; Х – наличие тахогенератора: Г – с тахогенератором; отсутствие буквы – без тахогенератора; ХХ – климатическое исполнение и категория размещения по ГОСТ 15150-69 и ГОСТ 15543-70.
Габаритные, установочные и присоединительные размеры электродвигателей постоянного тока 4ПН200 – 4ПН 280
| Тип электродвигателяРазмер | 4ПН200S | 4ПН 200М | 4ПН 200L | 4ПН225S | 4ПН 225M | 4ПН 225L | 4ПН250S | 4ПН 250M | 4ПН 250L | 4ПН280S | 4ПН 280M | 4ПН 280L |
| b1 | 14-0,043 | 16-0,043 | 18-0,043 | 20-0,052 | ||||||||
| b2 | 10-0,036 | 14-0,043 | 18-0,043 | 18-0,043 | ||||||||
| b10 | 318 | 356 | 406 | 457 | ||||||||
| b11 | 392±2 | 435±4 | 485±4 | 545±4 | ||||||||
| b12 | 105±0,7 | 100±2 | 100±2 | 110±2 | ||||||||
| d1 | 48-0,002+0,018 | 55-0,011+0,03 | 65-0,04+0,03 | 65-0,04+0,03 | ||||||||
| d2 | 38-0,002+0,018 | 48-0,002+0,018 | 60-0,011+0,03 | 65-0,04+0,03 | ||||||||
| d10 | 19+0,52 | 19+0,52 | 24+0,52 | 24+0,52 | ||||||||
| d30 | 413 | 500 | 500 | 600 | ||||||||
| h | 200-0,5 | 225-0,5 | 250-0,5 | 280-0,5 | ||||||||
| h2 | 9-0,09 | 10-0,09 | 11-0,09 | 12-0,11 | ||||||||
| h3 | 8-0,09 | 9-0,09 | 11-0,09 | 11-0,11 | ||||||||
| h5 | 51,5-0,25 | 59-0,29 | 69-0,31 | 74,5-0,31 | ||||||||
| h6 | 41-0,25 | 51,5-0,29 | 64-0,31 | 69-0,31 | ||||||||
| h20 | 25±0,5 | 20±2 | 25±2 | 25±2 | ||||||||
| h40 | 413 | 460 | 510 | 570 | ||||||||
| h41 | 517 | 583 | 535 | 697 | ||||||||
| L1 | 110±0,7 | 110±0,7 | 140±0,8 | 140±0,8 | ||||||||
| L2 | 80±0,6 | 110±0,7 | 140±0,8 | 140±0,8 | ||||||||
| L10 | 305 | 305 | 311 | 356 | 356 | 450 | 349 | 406 | 500 | 419 | 457 | 560 |
| L11 | 365±3 | 365±3 | 376±3 | 437±4 | 437±4 | 531±4 | 429±4 | 486±4 | 580±4 | 479±4 | 517±4 | 620±4 |
| L12 | 82±2 | 100±2 | 100±2 | 110±2 | ||||||||
| L30 | 785 | 845 | 875 | 930 | 975 | 1033 | 1000 | 1055 | 1145 | 1169 | 1214 | 1309 |
| L31 | 190±3 | 149±4 | 168±4 | 190±4 | ||||||||
| L33 | 880 | 940 | 970 | 1065 | 1110 | 1170 | 1151 | 1206 | 1296 | 1323 | 1368 | 1458 |
| L34 | 402±4 | 462±4 | 492±4 | 669±3 | 714±3 | 774±3 | 690±3 | 746±3 | 855±3 | 690±3 | 746±3 | 825±3 |
| L35 | 144-1,0 | 260-0,4 | 260-0,4 | 345-0,4 | ||||||||
| t1 | 5,5+0,2 | 6+0,2 | 7+0,2 | 7,5+0,2 | ||||||||
| t2 | 5+0,2 | 5,5+0,2 | 7+0,2 | 7+0,2 | ||||||||
| Динамический момент инерции, кг·м2 | 0,25 | 0,30 | 0,32 | 0,57 | 0,68 | 0,75 | 1,05 | 1,19 | 1,48 | 2,2 | 2,4 | 2,78 |
| Масса, кг | 300 | 340 | 360 | 460 | 500 | 540 | 590 | 640 | 710 | 930 | 970 | 1050 |
Информация относится к следующим наименованиям каталога
| Наименование | Ед. изм. изм. | Цена с НДС, р. | |
| Электродвигатель 8,5 кВт 800/2500 об 4ПН200SГ 220/220 В IM1001 | шт | 224 300,00 | |
| Электродвигатель 11,0 кВт 800/2500 об 4ПН200М 220/220 В IM1001 | шт | 225 000,00 | |
| Электродвигатель 12,5 кВт 600/2100 об 4ПН225S 220/220 В IM1001 | шт | 229 800,00 | |
| Электродвигатель 13,0 кВт 1120/3000 об 4ПН200S 220/220В IM1001 | шт | 203 400,00 | |
| Электродвигатель 13,0 кВт 1120/3500 об 4ПН200S 110/110В IM1001 | шт | 213 800,00 | |
| Электродвигатель 16,0 кВт 1000/2500 об 4ПН200М 440/220В IM1001 | шт | 219 400,00 | |
| Электродвигатель 16,0 кВт 530/1500 об 4ПН250S 220/220В IM1001 | шт | 242 300,00 | |
| Электродвигатель 20,0 кВт 750/1500 об 4ПН225МГ 440/220 В IM1001 | шт | 315 000,00 | |
| Электродвигатель 20,0 кВт 750/2500 об 4ПН225МГ 220/110 В IM2001 | шт | 290 800,00 | |
| Электродвигатель 22,0 кВт 750/2000 об 4ПН250S 220/220 В IM1001 | шт | 186 000,00 | |
| Электродвигатель 22,0 кВт 1000/2500 об 4ПН225S 220/220 В IM1001 | шт | 210 500,00 | |
| Электродвигатель 22,0 кВт 1000/2500 об 4ПН225S 220/220 В IM3001 | шт | 221 025,00 | |
| Электродвигатель 22,0 кВт 1500/3500 об 4ПН200S 220/220В IM1001 | шт | 186 200,00 | |
| Электродвигатель 22,0 кВт 1500/3500 об 4ПН200S 220/220В IM2001 | шт | 195 510,00 | |
| Электродвигатель 22,0 кВт 1600/3500 об 4ПН200S УХЛ4 220/220 В IM1001 | шт | 249 000,00 | |
| Электродвигатель 24,0 кВт 750/2000 об 4ПН250S 220/220 В IM1001 | шт | 186 000,00 | |
| Электродвигатель 30,0 кВт 1500/3500 об 4ПН200М 220/220 В IM2001 | шт | 215 930,00 | |
| Электродвигатель 30,0 кВт 1600/3500 об 4ПН200МГ 440/220 В IM3001 | шт | 278 850,00 | |
| Электродвигатель 32,0 кВт 750/2000 об 4ПН250М 220/220 В IM1001 | шт | 240 500,00 | |
| Электродвигатель 37,0 кВт 1500 об 4ПН225S 220/220 В IM1001 | шт | 540 000,00 | |
| Электродвигатель 37,0 кВт 1500 об 4ПН225S 220/220 В IM3001 | шт | 447 300,00 | |
| Электродвигатель 37,0 кВт 1500 об 4ПН225SГ 220/220 В IM1001 | шт | 522 000,00 | |
| Электродвигатель 37,0 кВт 1500 об 4ПН225SГ 220/220 В IM2001 | шт | 462 000,00 | |
| Электродвигатель 37,0 кВт 1500 об 4ПН225SГ 440/220 В IM1001 | шт | 248 000,00 | |
| Электродвигатель 37,0 кВт 1500/1850 об 4ПН225S 440/220 В IM1002 | шт | 271 200,00 | |
Электродвигатель 37,0 кВт 1500/1850 об 4ПН225SГ 440/220 В IM2001 незав. вент. вент. | шт | 267 600,00 | |
| Электродвигатель 37,0 кВт 1500/1850 об 4ПН225SГ 440/220 В IM3011 незав. вент. | шт | 267 600,00 | |
| Электродвигатель 37,0 кВт 1500/3000 об 4ПН225SГ 220/220 В IM3011 незав.вент. | шт | 552 000,00 | |
| Электродвигатель 45,0 кВт 750/2000 об 4ПН280S 220/220 В IM1001 | шт | 282 400,00 | |
| Электродвигатель 48,0 кВт 1000/1500 об 4ПН250М 440/220 В IM1001 | шт | 285 700,00 | |
| Электродвигатель 48,0 кВт 1000/2500 об 4ПН250М 220/220 В IM1001 | шт | 600 000,00 | |
| Электродвигатель 48,0 кВт 1500/3000 об 4ПН225М 220/220 В IM1001 | шт | 582 000,00 | |
| Электродвигатель 48,0 кВт 1500/3000 об 4ПН225М 220/220 В IM2001 | шт | 600 000,00 | |
| Электродвигатель 48,0 кВт 1500/3000 об 4ПН225МГ 220/220 В IM1001 | шт | 600 000,00 | |
| Электродвигатель 50,0 кВт 1500/1800 об 4ПН250S 440/220 В IM1001 | шт | 350 000,00 | |
| Электродвигатель 50,0 кВт 1500/1800 об 4ПН250SГ 440/220 В IM1001 | шт | 365 000,00 | |
| Электродвигатель 55,0 кВт 750/2000 об 4ПН280М 220/220 В IM1001 | шт | 564 000,00 | |
| Электродвигатель 55,0 кВт 750/2000 об 4ПН280МГ 220/220 В IM1001 | шт | 588 000,00 | |
| Электродвигатель 60,0 кВт 1500 об 4ПН250S 220/220 В IM1001 | шт | 525 000,00 | |
| Электродвигатель 60,0 кВт 1500 об 4ПН250SГ 220/220 В IM1001 | шт | 660 000,00 | |
| Электродвигатель 60,0 кВт 1500/2800 об 4ПН250S 220/220 В IM1001 | шт | 600 000,00 | |
| Электродвигатель 60,0 кВт 1500/2800 об 4ПН250S 220/220 В IM2001 | шт | 636 000,00 | |
| Электродвигатель 60,0 кВт 1500/2800 об 4ПН250SГ 220/220 В IM1001 | шт | 568 000,00 | |
| Электродвигатель 60,0 кВт 1700 об 4ПН250S 440/220 В IM1001 | шт | 265 000,00 | |
| Электродвигатель 71,0 кВт 1500/2800 об 4ПН250МГ 440/220 В IM1001 | шт | 576 000,00 | |
| Электродвигатель 75,0 кВт 1000/2250 об 4ПН280S 220/220 В IM1001 | шт | 296 000,00 | |
| Электродвигатель 80,0 кВт 1180/2500 об 4ПН280SГ 440/220 В IM1001 | шт | 257 100,00 | |
| Электродвигатель 80,0 кВт 1180/2500 об 4ПН280SГ 440/220 В IM2001 | шт | 242 000,00 | |
| Электродвигатель 80,0 кВт 1500 об 4ПН250M 220/220 В IM1001 | шт | 242 000,00 | |
| Электродвигатель 80,0 кВт 1500 об 4ПН250MГ 220/220 В IM1001 | шт | 258 000,00 | |
| Электродвигатель 80,0 кВт 1500/2800 об 4ПН250M 440/220 В IM1001 | шт | 295 000,00 | |
| Электродвигатель 85,0 кВт 1000/2250 об 4ПН280M 440/220 В IM1001 | шт | 295 800,00 | |
| Электродвигатель 90,0 кВт 1080 об 4ПН280SГ 440/220 В IM1001 | шт | 225 000,00 | |
| Электродвигатель 110,0 кВт 1500 об 4ПН280SГ 440/220 В IM3011 | шт | 398 485,00 | |
| Электродвигатель 110,0 кВт 1500/2600 об 4ПН280S 220/220 В IM1001 | шт | 316 240,00 | |
| Электродвигатель 110,0 кВт 1500/2600 об 4ПН280SГ 220/220 В IM1001 | шт | 316 240,00 | |
| Электродвигатель 132,0 кВт 1500 об 4ПН280LГ 440/220 В IM1001 | шт | 192 000,00 | |
| Электродвигатель 132,0 кВт 1500 об 4ПН280М 220/220 В IM1001 | шт | 212 640,00 | |
| Электродвигатель 132,0 кВт 1500 об 4ПН280МГ 220/220 В IM1001 | шт | 207 000,00 | |
| Электродвигатель 132,0 кВт 1500/1900 об 4ПН280L 440/220 В IM1001 | шт | 266 000,00 | |
| Электродвигатель 132,0 кВт 1500/1900 об 4ПН280М 440/220 В IM1001 | шт | 325 000,00 | |
| Электродвигатель 132,0 кВт 1500/1900 об 4ПН280МГ 440/220 В IM1001 | шт | 208 000,00 | |
| Электродвигатель 132,0 кВт 1500/2600 об 4ПН280М 220/220 В IM1001 | шт | 292 000,00 | |
| Электродвигатель 132,0 кВт 1500/2600 об 4ПН280МГ 440/220 В IM1001 | шт | 260 700,00 | |
| Наименование | Ед. изм. изм. | Цена с НДС, р. |
Исследование характеристик двигателя постоянного тока независимого возбуждения (стр. 1 из 2)
Исследование статических и динамических характеристик в одномассовой электромеханической системе с двигателем постоянного тока независимого возбуждения
Двигатель постоянного тока независимого возбуждения подключен по схеме, приведенной на рис. 1.
Рис. 1
Вышеприведенная система математически описывается системой дифференциальных уравнений:
где Uя, Uв, – напряжение на обмотке якоря и возбуждения (ОВД),
iя, iв , – ток якоря и обмотки возбуждения,
R я S, Rв – сопротивление якоря и обмотки возбуждения,
L я, Lв – индуктивность якоря и обмотки возбуждения,
Ф – магнитный поток обмотки возбуждения,
K – конструктивный коэффициент,
М – электромагнитный момент двигателя,
Мс — момент статического сопротивления двигателя,
JS — момент инерции двигателя,
По приведенным уравнениям составим математическую модель двигателя постоянного тока независимого возбуждения ( рис. 2).
2).
Рис. 2
Исходные данные для двигателя П 61 мощности PН = 11 кВт:
номинальное напряжение питания Uн =220 В,
номинальная скорость вращения n = 1500 об/мин,
номинальный ток в цепи якоря Iя. н. = 59,5 А,
сопротивление цепи якоря RЯS = 0,187 Ом,
сопротивление обмотки возбуждения RВ = 133 Ом,
число активных проводников якоря N = 496,
число параллельных ветвей якоря 2a = 2,
число витков полюса обмотки возбуждения wв =1800,
полезный магнитный поток одного полюса Ф = 8,2 мВб,
номинальный ток возбуждения обмотки возбуждения
IВ. Н. = 1,25 А,
максимальная допускаемая частота вращения 2250 об/мин,
момент инерции якоря J1= 0,56 кг×м2,
двигатель двухполюсный 2Pn=2,
масса двигателя Q = 131 кг.
Произведем необходимые расчеты.
1. Угловая скорость
2. Конструктивный коэффициент двигателя
3. Постоянная времени цепи возбуждения
Постоянная времени цепи возбуждения
4. Постоянная времени цепи якоря
5. Коэффициент Кф
Все полученные данные подставляем в структурную схему (рис. 2) и проведем ее моделирование с помощью программного пакета Matlab. Величины Uя= Uв= Uс подаются на входы схемы ступенчатым воздействием. На выходе снимаем значение скорости вращения двигателя w1. Динамическая характеристика двигателя (график изменения скорости w1(t) при номинальных параметрах и Мс=0) изображена на рис. 3. График показывает выход скорости на установившееся значение при включении двигателя.
График изменения скорости КФ(t) приведен на рис. 4.
 Это объясняется тем, что расчеты мы выполняли по эмпирическим формулам и не учли все параметры модели. Однако для нас наиболее важно получить качественные характеристики, а не количественные. А это наша модель позволяет сделать.
Это объясняется тем, что расчеты мы выполняли по эмпирическим формулам и не учли все параметры модели. Однако для нас наиболее важно получить качественные характеристики, а не количественные. А это наша модель позволяет сделать. рис. 3). Теперь мы изменяем значение Ic, которое становится равным Iн=59,5 А и получаем переходный процесс (см. рис. 5).
рис. 3). Теперь мы изменяем значение Ic, которое становится равным Iн=59,5 А и получаем переходный процесс (см. рис. 5). 7
7 Искусственные механические характеристики при изменении Uя.
Искусственные механические характеристики при изменении Uя.Как интерпретировать спецификацию двигателя постоянного тока | Сообщество RobotShop
Как интерпретировать характеристики двигателя постоянного тока?
Выбор правильного двигателя постоянного тока (или мотор-редуктора постоянного тока) для конкретного применения может оказаться непростой задачей, и многие производители предоставляют только основные технические характеристики двигателя. Этих базовых характеристик может быть недостаточно для ваших нужд. Ниже перечислены идеальные технические характеристики двигателя и, по возможности, способы приблизительных значений.
Ниже перечислены идеальные технические характеристики двигателя и, по возможности, способы приблизительных значений.
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
Ниже приведен список наиболее распространенных спецификаций, которые могут указывать производители двигателей постоянного тока. Для большинства любителей базовой информации достаточно, чтобы принять обоснованное решение о покупке мотора.
Номинальное напряжение : Напряжение, соответствующее максимальному КПД двигателя. Старайтесь выбирать основную аккумуляторную батарею, максимально соответствующую номинальному напряжению приводных двигателей. Например, если номинальное напряжение двигателя составляет 6 В, используйте 5 аккумуляторов NiMh по 1,2 В, чтобы получить 6 В. Если ваш двигатель работает при номинальном напряжении 3,5 В, вы можете использовать аккумулятор 3xAA или 3xAAA NiMh или аккумулятор 3,7 В LiPo или LiIon. Если вы используете двигатель за пределами его номинального напряжения, эффективность двигателя снижается, часто требуется дополнительный ток, выделяется больше тепла и сокращается срок службы двигателя. Помимо «номинального напряжения» двигатели постоянного тока также имеют диапазон рабочих напряжений, за пределами которого производитель не рекомендует эксплуатировать двигатель. Например, мотор-редуктор постоянного тока 6 В может иметь рабочий диапазон 3-9В; он будет работать не так эффективно, как 6В, но все равно будет работать хорошо.
Если вы используете двигатель за пределами его номинального напряжения, эффективность двигателя снижается, часто требуется дополнительный ток, выделяется больше тепла и сокращается срок службы двигателя. Помимо «номинального напряжения» двигатели постоянного тока также имеют диапазон рабочих напряжений, за пределами которого производитель не рекомендует эксплуатировать двигатель. Например, мотор-редуктор постоянного тока 6 В может иметь рабочий диапазон 3-9В; он будет работать не так эффективно, как 6В, но все равно будет работать хорошо.
Это скорость (угловая скорость), с которой будет вращаться конечный выходной вал, если к нему ничего не подключено. Если двигатель имеет пониженную передачу и скорость двигателя не указывается отдельно, значение об/мин без нагрузки представляет собой скорость вала после пониженной передачи. Скорость вращения двигателя пропорциональна входному напряжению. «Без нагрузки» означает, что двигатель не испытывает никакого сопротивления (ступица или колесо не установлены на конце). Обычно указанное число оборотов без нагрузки связано с номинальным напряжением.
Обычно указанное число оборотов без нагрузки связано с номинальным напряжением.
Если мощность двигателя не указана, ее можно приблизительно определить. Мощность связана с током (I) и напряжением (V) уравнением P = I*V. Используйте ток холостого хода и номинальное напряжение, чтобы приблизить выходную мощность двигателя. Максимальная мощность двигателя (которую следует использовать только в течение короткого времени) можно приблизительно определить, используя ток останова и номинальное напряжение (а не максимальное напряжение).
Момент остановки : Это максимальный крутящий момент*, который двигатель может обеспечить, когда вал больше не вращается. Важно отметить, что большинство двигателей получают непоправимый ущерб, если они находятся в состоянии остановки более нескольких секунд. При выборе двигателя вы должны учитывать, что его крутящий момент не должен превышать ~1/4–1/3 крутящего момента.
Это ток, потребляемый двигателем при максимальном крутящем моменте*. Это значение может быть очень высоким, и если у вас нет контроллера двигателя, способного обеспечить этот ток, есть большая вероятность, что ваша электроника тоже сгорит. Если ни останов, ни номинальный ток не указаны, попробуйте использовать номинальную мощность двигателя (в ваттах) и номинальное напряжение для оценки тока: Мощность [Ватт] = Напряжение [Вольт] x Ток [Ампер]
Общие характеристики :Общие характеристики двигателя постоянного тока обычно включают вес, длину и диаметр вала, а также длину и диаметр двигателя. Другие полезные размеры включают расположение монтажных отверстий и тип резьбы. Если указаны только длина или диаметр, обратитесь к изображению, фотографии или чертежу в масштабе, чтобы получить представление о других размерах на основе одного известного значения.
Крутящий момент
*»Крутящий момент» рассчитывается путем умножения силы (действующей на расстоянии от оси вращения) на расстояние. Двигатель, рассчитанный на крутящий момент 10 Нм, может удерживать 10 Н в конце 1 м. Точно так же он может удерживать 20 Н на конце 0,5 м (20 х 0,50 = 10) и так далее. Примечание : 1 кг * сила тяжести (9,81 м/с2) = 9,81 Н (~10 Н для быстрых расчетов)
Двигатель, рассчитанный на крутящий момент 10 Нм, может удерживать 10 Н в конце 1 м. Точно так же он может удерживать 20 Н на конце 0,5 м (20 х 0,50 = 10) и так далее. Примечание : 1 кг * сила тяжести (9,81 м/с2) = 9,81 Н (~10 Н для быстрых расчетов)
ИДЕАЛЬНЫЕ ХАРАКТЕРИСТИКИ правильный выбор мотора. Ниже приведена дополнительная информация, с которой вы можете столкнуться при поиске двигателей постоянного тока:
Напряжение в зависимости от числа оборотов в минуту :В идеале производитель должен привести график зависимости напряжения двигателя от числа оборотов в минуту. Для быстрого приближения рассмотрите возможность использования оборотов холостого хода и номинального напряжения: (номинальное напряжение, об/мин) и точки (0, 0). См. «передача вниз» ниже для двигателей с пониженной передачей.
Крутящий момент в зависимости от тока : Ток – это величина, которую нелегко контролировать. Двигатели постоянного тока потребляют ровно столько тока, сколько им нужно. Идеальные характеристики включают эту кривую, и приближения воспроизвести нелегко. Момент опрокидывания связан с током опрокидывания. Двигатель, который не может вращаться, будет потреблять максимальный («заклинивающий») ток и создавать максимально возможный крутящий момент. Ток, необходимый для обеспечения заданного крутящего момента, зависит от многих факторов, включая толщину, тип и конфигурацию проводов, используемых для изготовления двигателя, магнитов и других механических факторов.
Двигатели постоянного тока потребляют ровно столько тока, сколько им нужно. Идеальные характеристики включают эту кривую, и приближения воспроизвести нелегко. Момент опрокидывания связан с током опрокидывания. Двигатель, который не может вращаться, будет потреблять максимальный («заклинивающий») ток и создавать максимально возможный крутящий момент. Ток, необходимый для обеспечения заданного крутящего момента, зависит от многих факторов, включая толщину, тип и конфигурацию проводов, используемых для изготовления двигателя, магнитов и других механических факторов.
Многие производители роботов любят рисовать своего робота на компьютере, прежде чем приобретать необходимые детали. Хотя у всех производителей двигателей есть чертеж САПР с размерами, они редко делают его общедоступным. Идеальные размеры двигателя включают перечисленные выше основные параметры, а также расположение монтажных отверстий и тип резьбы. В идеале также должны быть указаны материалы, используемые для изготовления двигателя, шестерен и обмотки, а также отдельные размеры двигателя и шестерни.
В идеале также должны быть указаны материалы, используемые для изготовления двигателя, шестерен и обмотки, а также отдельные размеры двигателя и шестерни.
Производители двигателей постоянного тока, которые также производят соответствующие понижающие передачи для двигателей, должны указывать передаточное число понижающей передачи. Понижение передачи увеличивает крутящий момент и снижает обороты. Указанное значение оборотов без нагрузки всегда соответствует последнему выходному валу после понижения передачи. Чтобы найти угловую скорость вала двигателя до включения передачи, умножьте значение на передаточное число. Чтобы получить момент опрокидывания двигателя перед понижением передачи, разделите крутящий момент опрокидывания на понижение передачи. Материал, используемый для изготовления внутренних шестерен, обычно представляет собой пластик или металл и выбирается таким образом, чтобы выдерживать максимальный номинальный крутящий момент. Рассчитайте пониженную передачу ниже, учитывая значения до и после пониженной передачи:
Рассчитайте пониженную передачу ниже, учитывая значения до и после пониженной передачи:
Аксессуары : Оптический энкодер является наиболее распространенным аксессуаром для мотор-редуктора. Найти оптический энкодер подходящего размера для вашего двигателя может быть очень сложно, если он не произведен той же компанией. Оптический энкодер позволяет отслеживать как направление вращения, так и количество оборотов двигателя. При правильном коде оптический энкодер также может определить угол наклона вала.
Ступицы и муфты валов : Второстепенные элементы, такие как ступицы (используемые для соединения выходного вала с другими элементами), постепенно становятся доступными для выходных валов различных размеров. Только несколько производителей поставляют универсальные муфты для валов. Если вы не можете найти подходящую муфту, рассмотрите возможность использования цилиндрических шестерен для смещения вала на вал другого размера. На изображении ниже показаны три различных типа соединителей. Отверстие в ступице предназначено для резьбового винта («установочный винт»), который плотно прижимается к валу.
На изображении ниже показаны три различных типа соединителей. Отверстие в ступице предназначено для резьбового винта («установочный винт»), который плотно прижимается к валу.
Знакомство с двигателем постоянного тока: как читать техническое описание | Саймон БДЙ | luos
И как не выбросить в мусорку вместе со всеми вокруг
Идем дальше вглубь джунглей. В этом посте я покажу вам, что паспорт двигателя не всегда предназначен для того, чтобы помочь вам разжечь огонь в вашем камине или быть брошенным в случайного коллегу через открытое пространство. Здесь я объясняю, как на самом деле читать и понимать техническое описание двигателя.
Любой, кто знаком с основами двигателей постоянного тока, может прочитать это. Если вы чувствуете, что упускаете какие-то знания, посмотрите предыдущие посты в этой серии (руководство по двигателям в робототехнике и управление направлением и скоростью двигателя постоянного тока).
Работая с двигателями постоянного тока, вы, скорее всего, будете иметь дело с таблицами/файлами спецификаций. Многие розничные продавцы предоставляют их для определения характеристик своих двигателей, чтобы правильно их использовать. Вот как это может выглядеть:
Многие розничные продавцы предоставляют их для определения характеристик своих двигателей, чтобы правильно их использовать. Вот как это может выглядеть:
Здесь я хочу разделить это техническое описание на 3 раздела.
Раздел 1: Общие размеры двигателя. Эта часть очень полезна для интеграции двигателя в среду робота. Вы можете видеть, куда ставить винты, какой длины и диаметра вал, и т.д. . Вес тоже полезно знать, и часто это критическая проблема в робототехнике. Я не буду больше говорить об этом разделе здесь, потому что, ну, размеры есть размеры, и все.
Раздел 2: Здесь приведены характеристики двигателей, иногда представленные в виде таблицы. Опять же, в зависимости от того, какой ритейлер предоставляет информацию, можно найти либо много вещей (правда, не всегда полезных), либо почти ничего. Но некоторые из этих характеристик необходимы для хорошего понимания мотора. Вскоре мы увидим, какие характеристики являются наиболее важными.
Но некоторые из этих характеристик необходимы для хорошего понимания мотора. Вскоре мы увидим, какие характеристики являются наиболее важными.
Раздел 3: Характеристические кривые. Иногда вы их находите, иногда нет. Они полезны для получения общего представления о характеристиках вашего двигателя. Я объясню их позже в этом посте.
Некоторые полезные факты, которые всегда полезно иметь в виду:
- Двигатель поглощает энергию в виде тока и напряжения , поэтому в техническом описании двигателя будут указаны различные электронные характеристики.
- Поставляет энергию в виде вращательных движений (и немного тепла). Движения подразумевают скорость и крутящий момент .
Примечание: Крутящий момент представляет собой вращательную силу. Это означает силу, приложенную на расстоянии от оси вращения. Его выражение — сила, умноженная на расстояние.
Проще говоря, это усилие, прилагаемое к отвертке при завинчивании шурупа.
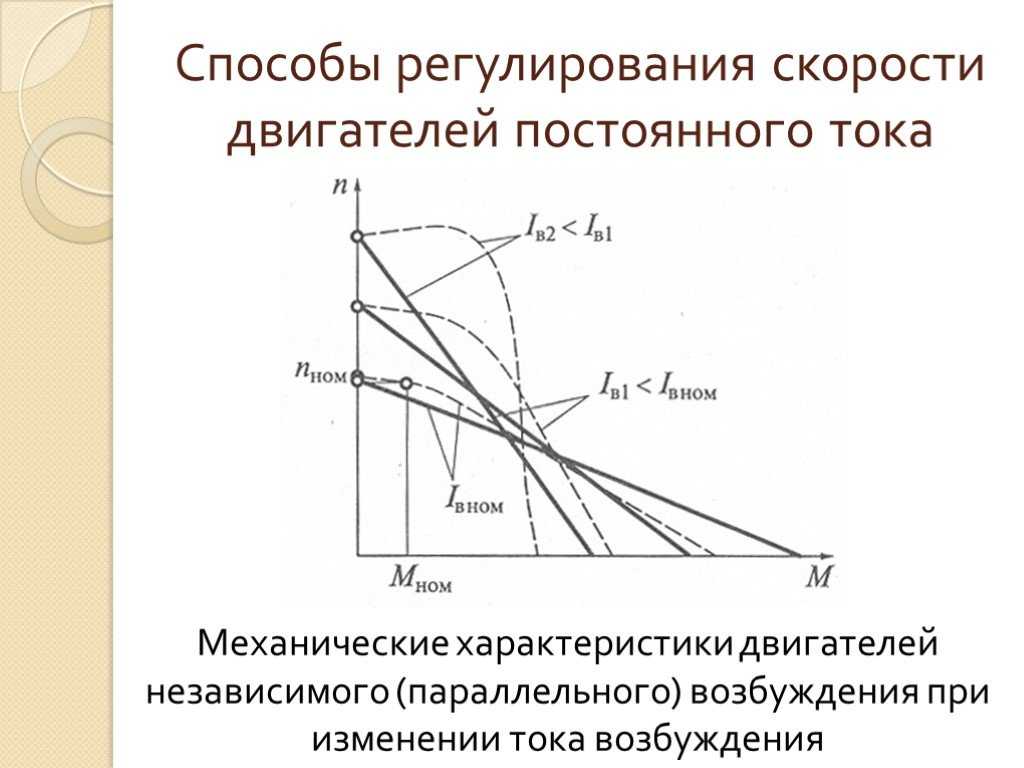
- Двигатель постоянного тока имеет два основных диапазона использования: непрерывный использование и прерывистый (или кратковременный) использование (третий — запретная зона). Первый позволяет заставить его вращаться в течение длительных периодов времени, а второй позволяет вращать только короткие периоды времени, пока он не нагреется слишком сильно.
Минимум три критических спецификации в раздел 2 вам понадобится, если вы хотите хорошо знать свой двигатель и правильно его использовать:
- Номинальное напряжение (Uном)
- Скорость холостого хода (S0)
- Опрокидывающий момент (Tопрокидывание)
Почему только эти три самые важные, а вокруг них крутится куча других странных слов и значений?
Потому что каждый результат, который вы хотите получить с двигателем, зависит от скорости или крутящего момента — или, в конечном счете, от того и другого.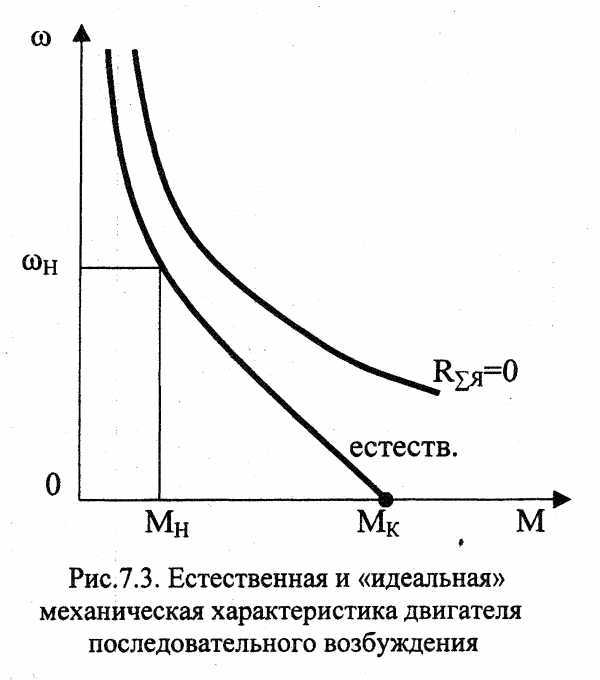 А при заданном напряжении скорость и крутящий момент тесно связаны между собой. Мы вернемся к этому через минуту.
А при заданном напряжении скорость и крутящий момент тесно связаны между собой. Мы вернемся к этому через минуту.
- Номинальное напряжение: Это в то же время напряжение, при котором были измерены другие характеристики, и рекомендуемое напряжение, при котором характеристики в большинстве случаев самые лучшие. Вы можете использовать двигатель с номинальным напряжением без каких-либо проблем или со значением, превышающим его. Имейте в виду, что слишком высокое напряжение приведет к повреждению катушек.
Также, напряжение прямо пропорционально скорости двигателя (как вы читали в предыдущих сообщениях).
- Скорость холостого хода: В соответствии с названием, это скорость вращения двигателя на выходе, когда к нему не приложена нагрузка, т.е. , когда к выходу ничего не подключено. Это максимальная скорость, которую может развить двигатель при данном напряжении.
- Опрокидывающий момент: Это максимальный крутящий момент, который может быть приложен к ротору, пока он не перестанет вращаться.

Чем быстрее вращается двигатель, тем меньший крутящий момент он обеспечивает — и наоборот.
Чтобы проверить эту глубокую истину дома, проведите простой эксперимент: возьмите небольшой двигатель постоянного тока и подайте низкое напряжение на его клеммы. Теперь возьмитесь за вал и попытайтесь остановить его вращение: чем больше «силы» (фактически крутящего момента) вы прикладываете к выходу, тем медленнее вращается ротор; и, наконец, он останавливается, пока вы не отпустите этого бедолагу.
Двигатель постоянного тока — или что-то в этом роде — небрежно взрывается, чтобы выразить свое несогласие.Примечание: Не пытайтесь делать это слишком долго — т.е. не более секунды или двух. Двигатель с питанием, который не вращается, подобен источнику питания, подключенному к катушке: провода быстро нагреются, его изоляционная втулка расплавится, все это немного расширится и может сильно сгореть.

О чем говорят вам эти три характеристики? Они дают вам теоретический диапазон использования вашего двигателя. Вы знаете, что для оптимальной работы двигатель должен питаться от заданного номинального напряжения. Также вы знаете, какова его максимальная скорость и максимальная нагрузка, которую он может выдержать (1) . Конечно, n скорость o-load и момент опрокидывания являются экстремальными значениями (теоретически недостижимыми), и лучше не толкать двигатель близко к этим пределам, если вы хотите обеспечить хорошую динамику. Двигатель никогда не работает хорошо на своих экстремальных значениях.
Согласно тому, что мы только что узнали, вот как это выглядит на более простой характеристической кривой:
Базовая кривая скорость-крутящий момент. Он всегда линейный.Пример одной и той же кривой скорость-момент при различных напряжениях.Примечание: Эта кривая показана для заданного фиксированного напряжения.
 Если вы измените напряжение, оно появится параллельно исходному, но выше его для более высокого напряжения или под ним для более низкого напряжения:
Если вы измените напряжение, оно появится параллельно исходному, но выше его для более высокого напряжения или под ним для более низкого напряжения:Если есть то, что я назвал ранее разделом 3 в вашем техническом паспорте, то он должен обеспечивать именно эту кривую (или хотя бы ее часть). Также могут появиться некоторые другие кривые, мы увидим это позже в этом посте.
Как видите, скорость вращения максимальна, когда на валу нет нагрузки, это состояние без нагрузки . Затем она снижается при увеличении нагрузки. В правой части кривой максимальная нагрузка означает полное отсутствие скорости. Это состояние остановки .
Кривая фактически представляет множество рабочих точек, связанных с двигателем. Например, двигатель на 12 В при заданной нагрузке 5 мН.м будет иметь заданную скорость 400 об/мин (2) :
Одна из многих функциональных точек, составляющих кривую.
Примечание: Имейте в виду, что это теоретическое поведение; это означает, что всегда будет небольшое расхождение, если вы попробуете это с реальным двигателем, из-за внешних условий, качества сборки, диапазонов точности.
Наконец, двигатель практически нельзя использовать на всей его кривой скорости-крутящего момента. Существует виртуальный предел, разделяющий непрерывный диапазон на прерывистый. В то время как вы можете использовать свой двигатель столько, сколько хотите на первом диапазоне, второй, скорее всего, нагреет ваш двигатель и повредит его, если вы будете слишком долго работать в этом диапазоне. Этот предел, называемый максимальным непрерывным крутящим моментом, можно соблюдать большую часть времени около значения Опрокидывающий момент / 3 , но это не золотое правило.
Зеленый: все в порядке, вы можете повеселиться; Светло-красный: не задерживайтесь здесь слишком долго; Темно-красный: о-мой-пожалуйста-убирайтесь отсюда побыстрее.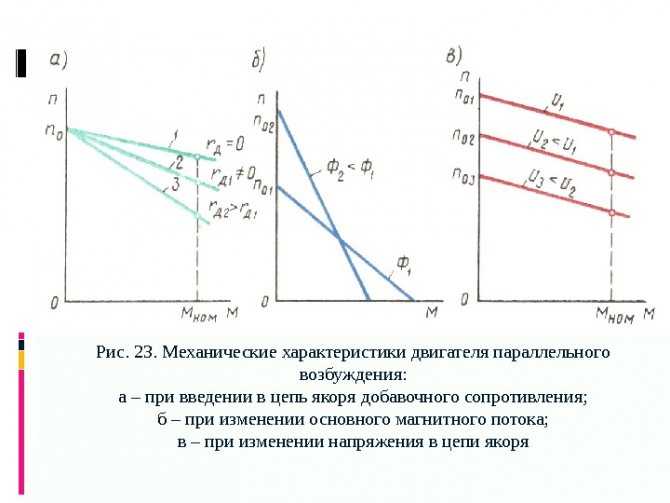
Вернемся к разделу 2 , спец. Есть несколько других важных характеристик, которые идут сразу после трех, о которых мы говорили ранее. Вот список тех, что идут сразу после:
- Ток холостого хода: Ток, потребляемый двигателем при непрерывном вращении на холостом ходу.
- Пусковой (или остановочный) ток: Ток, потребляемый двигателем при остановленном крутящем моменте. Этот ток наблюдается в виде пика при вращении ротора.
- Номинальная (или непрерывная) скорость, крутящий момент и ток: Эти три значения связаны друг с другом и определяют рабочую точку вашей кривой скорости-крутящего момента. Это точка, в которой созданы наилучшие условия для обеспечения максимальной эффективности.
- Максимальный непрерывный ток и крутящий момент: (Иногда называется номинальным током и крутящим моментом.) Точка кривой скорости-момента, которая находится на границе между непрерывным и прерывистым диапазонами, иногда около значения крутящего момента, деленного на три. . В этот момент величина тока по-прежнему гарантирует, что обмотка не перегревается. Выше этих значений двигатель может быстро перегреться. Под ними величина тока позволяет ротору рассеивать тепло.
- Пиковый крутящий момент: Для большинства розничных продавцов пиковый крутящий момент — это максимально возможный крутящий момент, который двигатель может обеспечить при прерывистой работе, т. е. в течение короткого времени, не повреждая себя и не сокращая срок службы.
- Момент трения: Это потери крутящего момента, вызванные трением между щетками и коллектором, а также между валом и подшипниками. Она может меняться в зависимости от температуры двигателя.
- Константа крутящего момента: Константа, позволяющая связать крутящий момент с током. Я дам вам формулу позже в этом посте, в качестве подарка. Обычно в Н.м/А или мН.м/А .
- Константа скорости: Константа, позволяющая связать скорость с крутящим моментом двигателя.
 . В этот момент величина тока по-прежнему гарантирует, что обмотка не перегревается. Выше этих значений двигатель может быстро перегреться. Под ними величина тока позволяет ротору рассеивать тепло.
. В этот момент величина тока по-прежнему гарантирует, что обмотка не перегревается. Выше этих значений двигатель может быстро перегреться. Под ними величина тока позволяет ротору рассеивать тепло.
Примечание: При использовании соответствующих единиц из Международной системы единиц, постоянная крутящего момента, умноженная на постоянную скорости, равна 1. Это , а не , черная магия.
- Градиент скорости/крутящего момента: Это коэффициент, противоположный линейной кривой скорость-крутящий момент. Обычно при об/мин/В . Кривая скорость-крутящий момент выражается следующим уравнением (N как скорость, T как крутящий момент):
- Мощность или номинальная мощность: Это механическая мощность, потребляемая при половине крутящего момента остановки. Визуально, поскольку мощность (в Вт ) равна крутящему моменту (в Н·м ), умноженному на скорость (в рад/с ), это площадь квадрата под характеристикой скорость-момент при половине крутящего момента. .
- Максимальная эффективность: Это наилучшая производительность, которую может обеспечить двигатель. КПД представляет собой отношение между выходной механической мощностью и входной электрической мощностью и в основном выражается в % . Как правило, это происходит при высокой скорости и низком крутящем моменте.
- Терминальное сопротивление и индуктивность: Это соответственно сопротивление ( Ом, Ом) и индуктивность ( Ом, Гн) обмотки. Они используются для расчета различных других характеристик.
- Тепловая постоянная времени: Постоянная в секундах ( с ), позволяющая узнать время, необходимое обмотке для достижения 63% своего критического значения при кратковременном использовании. Поэтому полезно знать, как долго вы можете использовать двигатель в его прерывистом диапазоне.
- Термическое сопротивление: В основном в градусах Кельвина на ватт ( К/Вт ). Эти значения представляют собой тепловое сопротивление между ротором и статором/корпусом, а также между статором/корпусом и окружающим воздухом. Чем ниже значение, тем лучше рассеивание тепла.
- Максимальная температура обмотки: Критическая температура, выше которой двигатель плохо себя чувствует и со временем выйдет из строя и сократит срок службы.
- Инерция ротора: Инерция ротора. Чем ниже значение, тем быстрее двигатель переходит от нулевой скорости к скорости холостого хода.
- Механическая постоянная времени: Время (в секундах, с ), за которое двигатель в состоянии покоя без нагрузки достигает 63% скорости холостого хода при постоянном напряжении. Значение пропорционально инерции ротора и обратно пропорционально квадрату постоянной крутящего момента, я уверен, что вы жаждали узнать это.
- Осевой и радиальный люфт: Люфт вала соответственно вдоль него или перпендикулярно ему. Обычно в мм .
- Показатель качества: Эта почти оккультная цифра на самом деле является константой, но она вам не помогает. Он рассчитывается путем деления постоянной крутящего момента на квадратный корень сопротивления клемм или крутящего момента, деленного на квадратный корень из мощности. Это полезно для сравнения различных типов двигателей, поскольку оно остается постоянным независимо от напряжения двигателя и конфигурации обмотки.
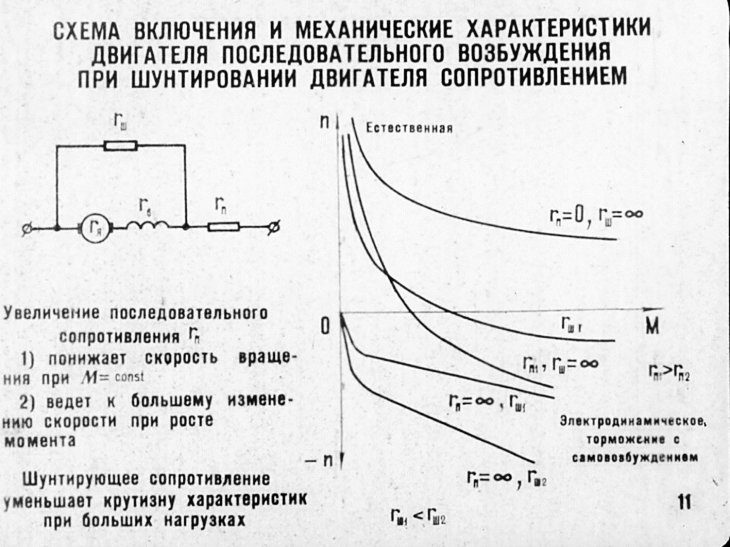 КПД представляет собой отношение между выходной механической мощностью и входной электрической мощностью и в основном выражается в % . Как правило, это происходит при высокой скорости и низком крутящем моменте.
КПД представляет собой отношение между выходной механической мощностью и входной электрической мощностью и в основном выражается в % . Как правило, это происходит при высокой скорости и низком крутящем моменте. Чем ниже значение, тем лучше рассеивание тепла.
Чем ниже значение, тем лучше рассеивание тепла. Он рассчитывается путем деления постоянной крутящего момента на квадратный корень сопротивления клемм или крутящего момента, деленного на квадратный корень из мощности. Это полезно для сравнения различных типов двигателей, поскольку оно остается постоянным независимо от напряжения двигателя и конфигурации обмотки.
Он рассчитывается путем деления постоянной крутящего момента на квадратный корень сопротивления клемм или крутящего момента, деленного на квадратный корень из мощности. Это полезно для сравнения различных типов двигателей, поскольку оно остается постоянным независимо от напряжения двигателя и конфигурации обмотки.Очевидно, я забыл многие характеристики, которые вы можете найти позже в некоторых спецификациях. Я буду добавлять недостающие время от времени, но не волнуйтесь, вы уже знаете хорошие вещи.
Теперь, когда мы знаем множество спецификаций, мы увидим, что некоторые из них можно найти на характеристических кривых. Позвольте мне объяснить эти кривые, после того как я покажу вам, что это за беспорядок:
Там. Теперь ты можешь плакать.Вы узнали синюю кривую: характеристика скорость-момент. Хороший. Давайте посмотрим на других.
- Кривая тока (темно-красная): Это линия, показывающая изменение текущего по сравнению с крутящего момента. Помните, что скорость связана с крутящим моментом (чем больше крутящий момент, тем меньше скорость)? Здесь у нас есть новая вещь: чем больше крутящий момент, тем больше ток . Если рассматривать проблему с ног на голову, то это вроде как логично: при постоянном напряжении, если вы добавляете все больше и больше нагрузки на вал — как ваша рука пытается остановить его вращение — скорость будет уменьшаться, а двигатель будет потреблять больше. и больше тока, чтобы преодолеть механическое сопротивление вашей руки — крутящий момент — и продолжать вращаться.
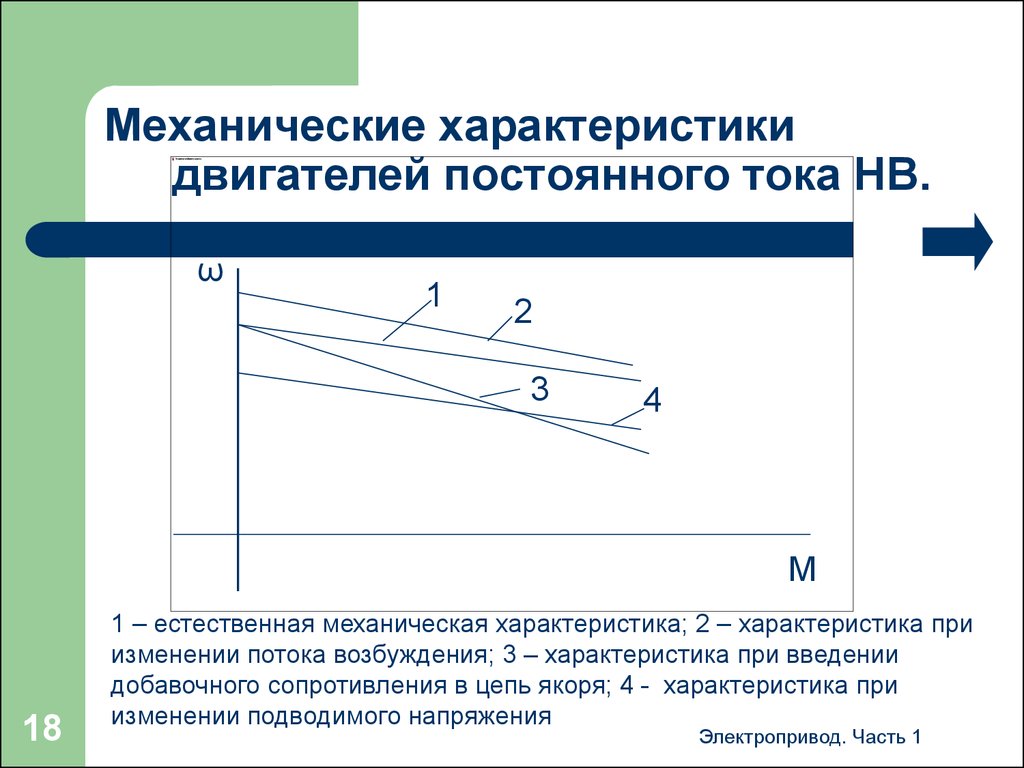 Помните, что скорость связана с крутящим моментом (чем больше крутящий момент, тем меньше скорость)? Здесь у нас есть новая вещь: чем больше крутящий момент, тем больше ток . Если рассматривать проблему с ног на голову, то это вроде как логично: при постоянном напряжении, если вы добавляете все больше и больше нагрузки на вал — как ваша рука пытается остановить его вращение — скорость будет уменьшаться, а двигатель будет потреблять больше. и больше тока, чтобы преодолеть механическое сопротивление вашей руки — крутящий момент — и продолжать вращаться.
Помните, что скорость связана с крутящим моментом (чем больше крутящий момент, тем меньше скорость)? Здесь у нас есть новая вещь: чем больше крутящий момент, тем больше ток . Если рассматривать проблему с ног на голову, то это вроде как логично: при постоянном напряжении, если вы добавляете все больше и больше нагрузки на вал — как ваша рука пытается остановить его вращение — скорость будет уменьшаться, а двигатель будет потреблять больше. и больше тока, чтобы преодолеть механическое сопротивление вашей руки — крутящий момент — и продолжать вращаться.В то время как напряжение является образом скорости , теперь мы наблюдаем, что ток является образом крутящего момента .
Я хочу представить вам небольшую, но важную формулу:
Здесь KT — постоянная двигателя ( Нм/А ), I — ток ( А ) в момент времени, который вы хотите знать. крутящий момент T ( Н·м ), а I0 – ток холостого хода ( А ). Некоторые ритейлеры упростили это уравнение, удалив из него I0.
крутящий момент T ( Н·м ), а I0 – ток холостого хода ( А ). Некоторые ритейлеры упростили это уравнение, удалив из него I0.
- Кривая мощности (зеленая): Это кривая выходной мощности, выраженная в ваттах. Это механическая сила. Он рассчитывается по скорости (S в рад/с ) и крутящему моменту (T в Н·м ):
- Кривая эффективности (коричневая): Это соотношение между выходной мощностью и входной мощностью — ток A ( A ) умножить на напряжение U ( В ):
Некоторые заметили, что наилучшая эффективность достигается при значении около Опрокидывающий момент/7 . Как и в случае с максимальным продолжительным крутящим моментом при Опрокидывающий момент / 3 , это , а не золотое правило, а простое наблюдение, которое применимо не к каждому двигателю. Будьте осторожны с этим.
Это все, что я могу предложить вам сегодня, и да, это много для обработки.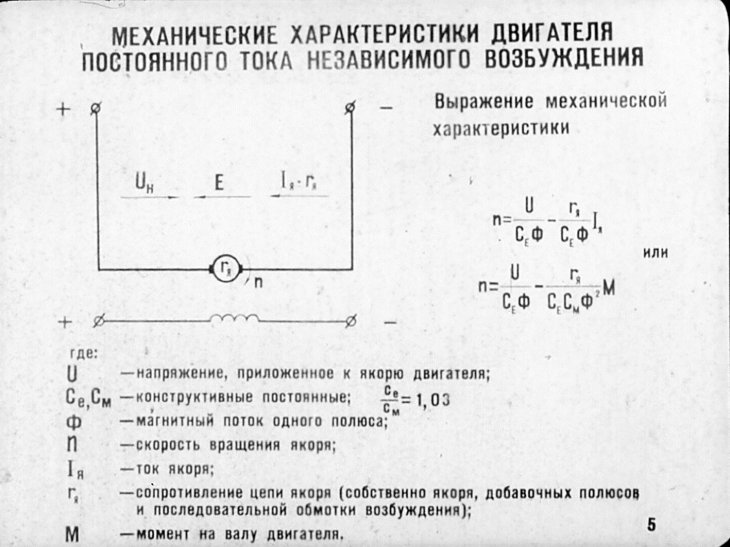 Вы можете прекратить чтение здесь, если у вас слишком сильная головная боль. Далее я расскажу о некоторых случайных, но полезных комментариях о даташитах, с которыми вы можете столкнуться в дикой природе. Не стесняйтесь читать его тоже, если вы хотите узнать больше об этом.
Вы можете прекратить чтение здесь, если у вас слишком сильная головная боль. Далее я расскажу о некоторых случайных, но полезных комментариях о даташитах, с которыми вы можете столкнуться в дикой природе. Не стесняйтесь читать его тоже, если вы хотите узнать больше об этом.
Также в конце поста написаны некоторые примечания.
Спасибо, что прочитали. Пожалуйста, хлопайте в ладоши!
Номинальный или расчетный?
В технических описаниях различных двигателей вы, вероятно, найдете такие данные, как Номинальное напряжение или Номинальное напряжение — или скорость, крутящий момент и ток.
В большинстве случаев номинальное напряжение соответствует номинальному напряжению двигателей. Имеет то же значение, т.е. напряжение, на которое рассчитан двигатель, при нормальных условиях. Это просто два способа сказать одно и то же.
Однако в некоторых случаях (, например, в техническом паспорте электронного компонента) оба слова не будут означать одно и то же:
- использовал.
- Номинальное напряжение , с другой стороны, иногда может означать максимальное напряжение, при котором двигатель может безопасно работать без повреждений.
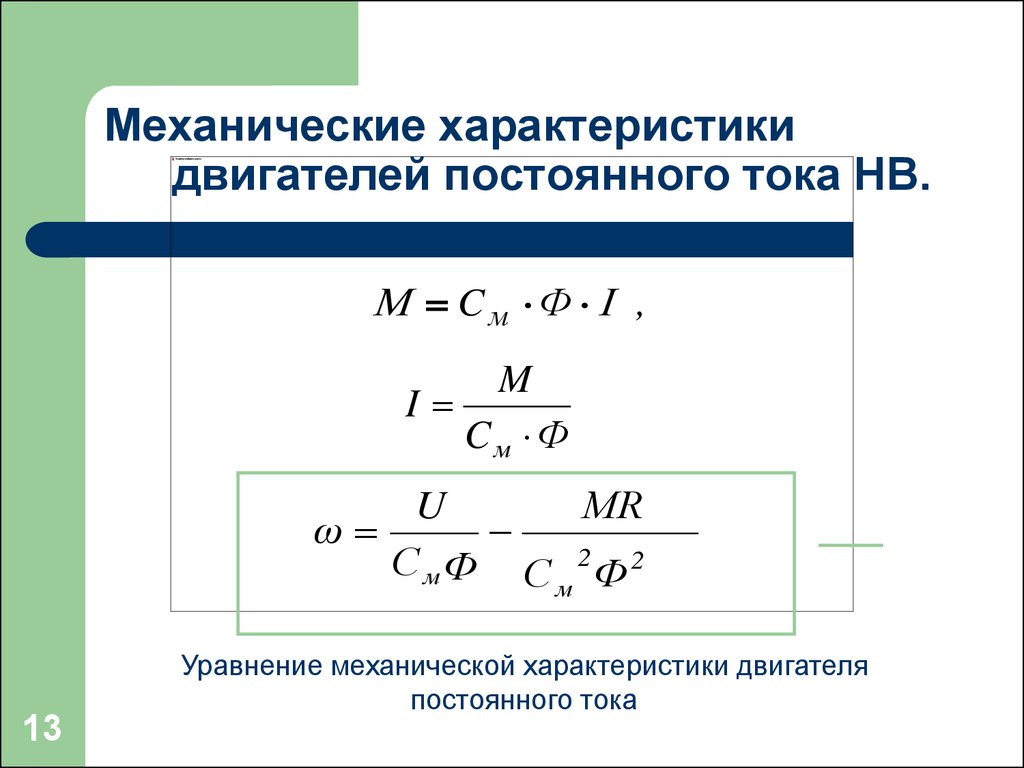
В случае, если номинальное и номинальное различаются, может быть указано номинальное напряжение Номинальное максимальное напряжение , чтобы подчеркнуть разницу с номинальным напряжением.
Единицы: ад реален
Сразу скажу: есть много единиц. Вы можете буквально выразить заданную меру десятками различных единиц, и это может стать настоящим кошмаром. В конечном итоге это может привести, например, к потере спутника, если вы сделаете одну небольшую ошибку. Да, спутник.
В принципе, некоторые люди давно решили, что жизнь была бы намного приятнее, если бы было много разных способов выразить меру. Поэтому существуют разные системы измерений: Международная система единиц — современная форма метрической системы — , Имперская система , Традиционные единицы США и т.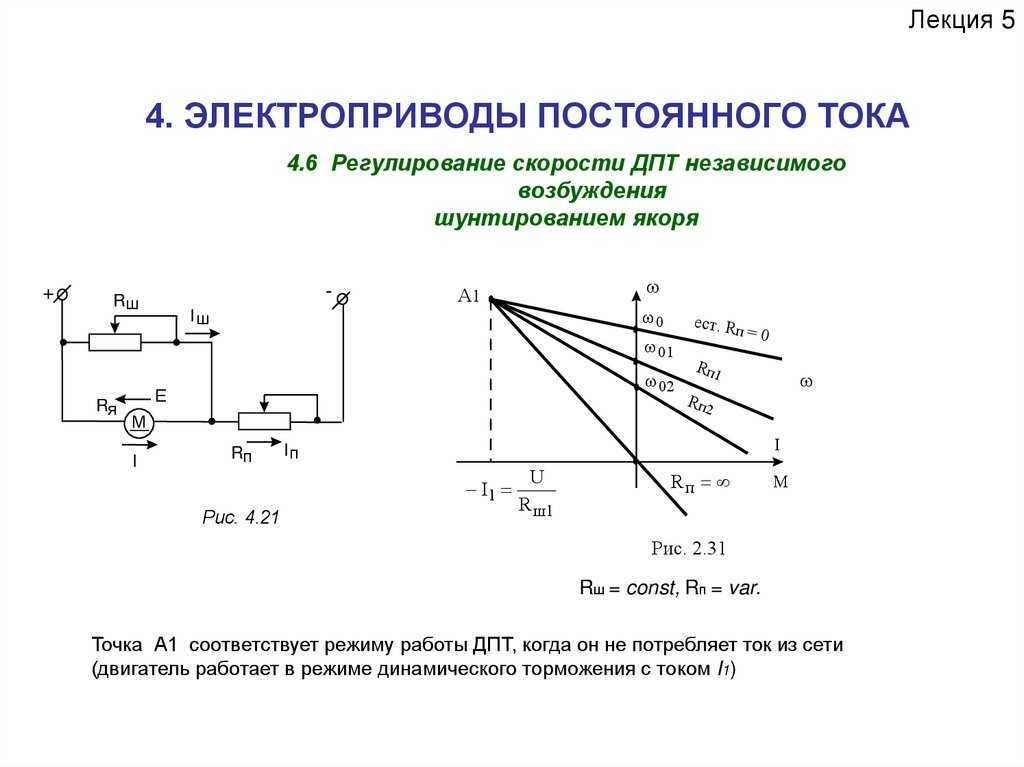 д. . Единицы измерения в разных системах не очень похожи:
д. . Единицы измерения в разных системах не очень похожи:
1 метр (метрическая система) = 3,28 фута (имперская система)
Внутри метрической системы почти каждую единицу можно разделить или умножить на 10 (соответственно деци — или дека-), 100 ( санти- или гекто-), 1000 ( милли- или кило-), и т.д. , а то и 1000000 ( микро- или мега-), и больше. Например, 100 метров — это 1 гектометр.
Как будто этого было недостаточно, вы увидите, что для таких единиц, как крутящий момент в метрической системе, в некоторых таблицах данных указан крутящий момент, например, Н.мм , в то время как в других крутящий момент выражается как мН.м . В данном конкретном случае все точно так же, потому что ньютонов умножить на миллиметров (не деление).
РЕДАКТИРОВАТЬ: О, и есть люди, которые скорее скажут метр-ньютон ( мН , не забудьте эту точку, я не сказал миллиньютон мН ) чем Ньютон -метр ( Н.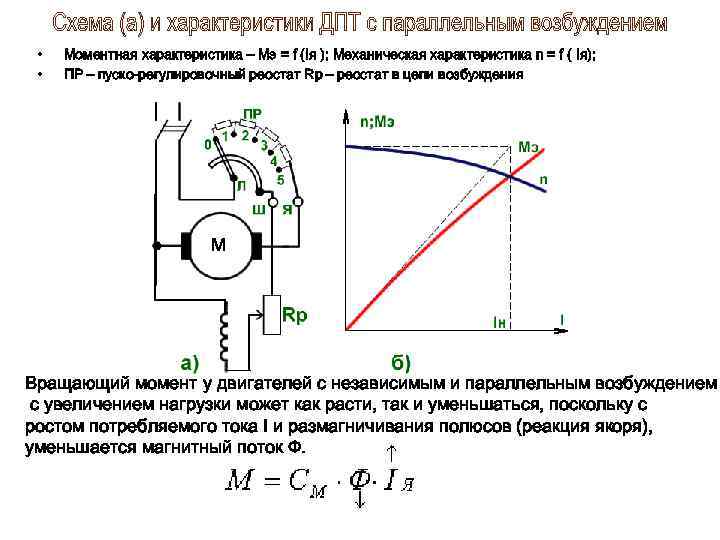 м ). Поскольку это умножение, они… могут.
м ). Поскольку это умножение, они… могут.
Слишком много причин для ошибок, просчетов, неправильных толкований, ну, много неверных. Не говоря уже о реальных войнах между пользователями этих разных систем.
Другая оккультная группа восхваляла бы банановая единица вместо метра или фута.Поэтому в некоторых спецификациях будет (например) указан крутящий момент в кгс·см (3) , в других — Н·м , а в некоторых других — унций-дюйм (4) . Поэтому не забудьте преобразовать свои значения в нужные единицы, прежде чем манипулировать ими вместе; всегда будьте осторожны и перепроверяйте свою работу, если вы действительно любите свой спутник.
Чтобы избежать ошибок, я использую очень полезный онлайн-инструмент под названием Translator Cafe, который каждый день пытается спасти мир.
Спасибо, что прочитали.
— Если вам понравилось то, что вы прочитали, пожалуйста, хлопайте в ладоши и следите за нами на Medium!
Примечание (1): В большинстве случаев это значения, указанные для необработанного двигателя.
Примечание (2): об/мин означает число оборотов в минуту и не является реальной единицей из-за слова 9.0114 оборот , согласно Международной системе единиц. Однако он широко используется, потому что он четче, чем радиан в секунду единиц.
Примечания (3) и (4): кг.см, кг.мм и т.д.; или oz.ft, oz.in и т. д. являются единицами крутящего момента , а не . реальными единицами крутящего момента являются кгс.см, гс.мм, унция-сила.дюйм, унция-сила.фут и так далее. f означает силу: килограмм-сила или унция-сила являются мерой силы, такой как Ньютон, тогда как килограмм или унция являются мерой массы. Тем не менее, вы, вероятно, будете видеть их часто, но имейте в виду, что это распространенная ошибка.
 Если вы не имеете дело с моторным редуктором, вам, вероятно, также придется разработать редуктор и принять во внимание передаточное число.
Если вы не имеете дело с моторным редуктором, вам, вероятно, также придется разработать редуктор и принять во внимание передаточное число. Я инженер по мехатронике, соучредитель Luos . Мы разрабатываем новые технологии, чтобы создавать и производить электронные устройства проще и быстрее.
Мы разрабатываем новые технологии, чтобы создавать и производить электронные устройства проще и быстрее.
Технические характеристики бесщеточного двигателя постоянного тока, как выбрать двигатель BLDC
измерение характеристик бесщеточного двигателя постоянного токаРесурс: https://www.youtube.com
Существуют различные технические характеристики бесщеточного двигателя постоянного тока. Обычно они указаны в технических характеристиках, которые поставляются с двигателем. Некоторые из них также напечатаны или выбиты на двигателе. Если вы хотите купить бесщеточный двигатель постоянного тока, очень важно, чтобы вы были знакомы с этими характеристиками. Разные типы моторов тоже, и их преимущества. Мы уже рассмотрели это в предыдущих главах.
В этом последнем разделе я расскажу о характеристиках двигателей постоянного тока, используемых производителями. Я также остановлюсь на соображениях при выборе двигателя BLDC для конкретного использования. Это поможет вам найти правильный двигатель EC для вашего проекта в зависимости от области применения и других требований.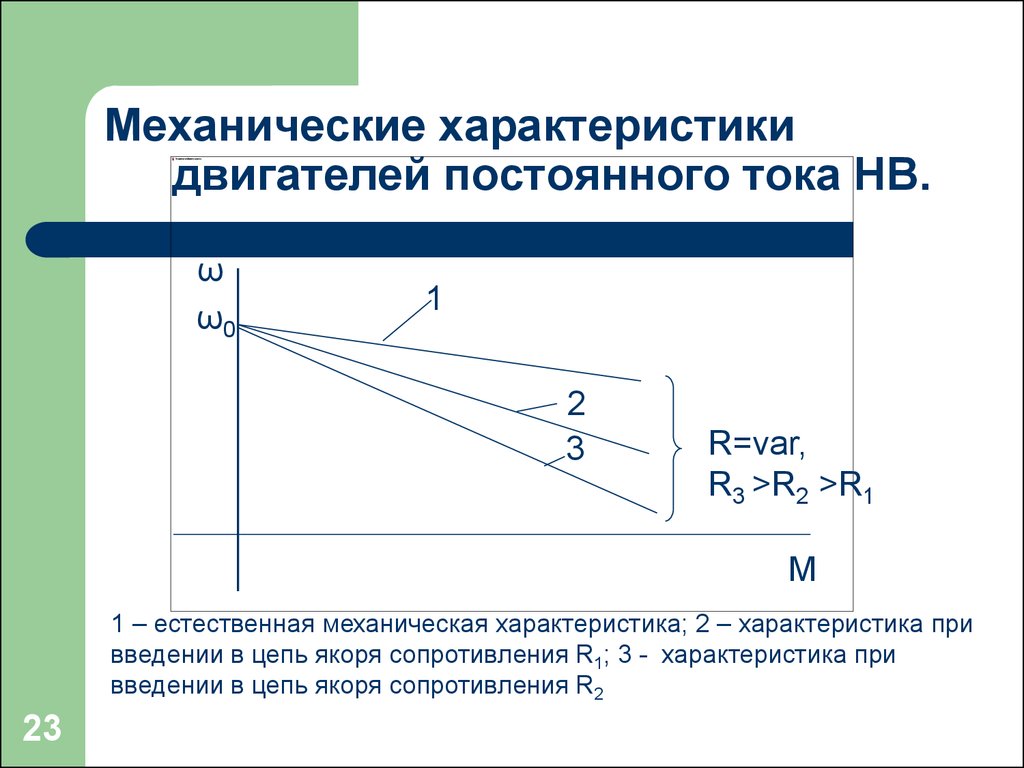 Продолжай читать.
Продолжай читать.
Общие технические характеристики бесщеточных двигателей
Производители бесщеточных двигателей постоянного тока используют ряд параметров для описания своей продукции. К ним относятся номинальное напряжение и ток, крутящий момент, скорость и другие. Ниже приведен список технических характеристик бесщеточных двигателей постоянного тока, их символы и значения (обратите внимание, что этот список никоим образом не является исчерпывающим и включает только наиболее важные параметры)
- Reference Voltage (V)- means the motor’s rated terminal voltage
- Current (It)- the current that the motor will draw when operating within the rated torque
- Peak current ( IpK)- максимальный ток, который должен потреблять двигатель
- Нет нагрузка ток ( INL) – ток, который потребляет двигатель при отсутствии нагрузки, которую необходимо преодолеть
- Сопротивление (R) — используется для обозначения сопротивления обмотки двигателя
- Индуктивность (L) — используется для расчета полного сопротивления обмотки
- Скорость (N) — используется для обозначения номинальной мощности двигателя скорость или об/мин
- Температура (T) — используется для обозначения рабочей температуры двигателя
- Непрерывная крутящий момент (Tc)- крутящий момент для заданной скорости
- Двигатель 3 постоянный4 (км) — используется для отображения отношения мощности к крутящему моменту двигателя.
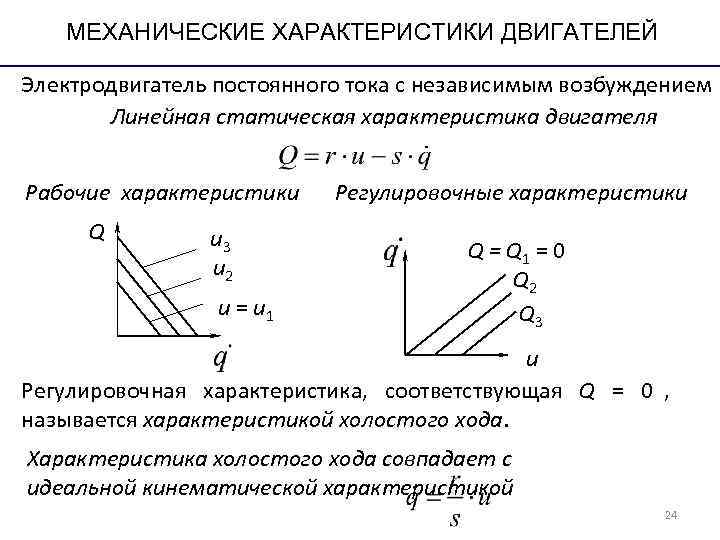
При выборе двигателя BLDC перечисленные выше характеристики помогают определить рабочие характеристики двигателя или, другими словами, ожидаемую производительность. Конечно, необходимо учитывать и другие аспекты, такие как размер двигателя и многое другое, как объясняется далее.
Ресурс: https://www.youtube.com
Факторы, которые следует учитывать при покупке бесщеточного двигателя постоянного тока
Существует множество причин для покупки бесщеточного двигателя, таких как высокая эффективность двигателя, превосходный крутящий момент, долговечность и низкие требования к техническому обслуживанию. Но мотор должен соответствовать своему назначению, что требует тщательного подхода при его выборе. Прежде чем сделать выбор, мы рекомендуем проверить технические характеристики бесщеточного двигателя постоянного тока, а также другие факторы, упомянутые ниже.
Тип двигателя
Существуют различные типы бесщеточных двигателей постоянного тока. Каждый из них имеет свои преимущества и недостатки при использовании в определенных средах. На основе информации, содержащейся в предыдущих главах, выберите тот, который лучше всего соответствует вашим требованиям. Например, встроенные двигатели BLDC подходят для высокоскоростных приложений, но им не хватает крутящего момента. Out-runner, с другой стороны, не такие быстрые, но обеспечивают более высокий уровень крутящего момента.
Каждый из них имеет свои преимущества и недостатки при использовании в определенных средах. На основе информации, содержащейся в предыдущих главах, выберите тот, который лучше всего соответствует вашим требованиям. Например, встроенные двигатели BLDC подходят для высокоскоростных приложений, но им не хватает крутящего момента. Out-runner, с другой стороны, не такие быстрые, но обеспечивают более высокий уровень крутящего момента.
Размер двигателя
Для различных применений требуются двигатели разных размеров. В большинстве случаев производители двигателей BLDC используют систему именования, состоящую из 4-значных чисел. В этой системе первые две цифры обозначают размер двигателя по диаметру статора в миллиметрах. Чем выше число, тем больше статор и мощнее двигатель. Но это также означает более громоздкий двигатель. В зависимости от конкретных требований вашего проекта купите бесщеточный двигатель постоянного тока, который подходит для планируемого использования.
Тип контроллера
Бесщеточный двигатель использует электронный контроллер для управления своей работой. Контроллер может быть простой двухпозиционной системой, синусоидальной или трапециевидной. Контроллер включения/выключения издает слышимый шум и не обеспечивает плавный крутящий момент. Однако он обеспечивает более дешевый метод управления. Трапециевидный регулятор более плавный, но не такой плавный, как синусоидальный. Внимательно рассмотрите варианты, особенно если вы покупаете бесщеточный двигатель постоянного тока онлайн.
Контроллер может быть простой двухпозиционной системой, синусоидальной или трапециевидной. Контроллер включения/выключения издает слышимый шум и не обеспечивает плавный крутящий момент. Однако он обеспечивает более дешевый метод управления. Трапециевидный регулятор более плавный, но не такой плавный, как синусоидальный. Внимательно рассмотрите варианты, особенно если вы покупаете бесщеточный двигатель постоянного тока онлайн.
Цена
Как и в случае с другими продуктами, цена двигателя BLDC играет большую роль при выборе. Вы же не хотите потратить больше, чем необходимо или слишком мало, и в итоге получить некачественное устройство. Цена бесщеточного двигателя постоянного тока обычно определяется количеством и типом компонентов. Например, двигатель BLDC с датчиком стоит дороже, чем двигатель без датчика.
Небольшие бесщеточные двигатели стоят от 100 до 300 долларов. Более крупные со сложной конструкцией и высокотехнологичной электроникой стоят дороже, до нескольких сотен или даже выше.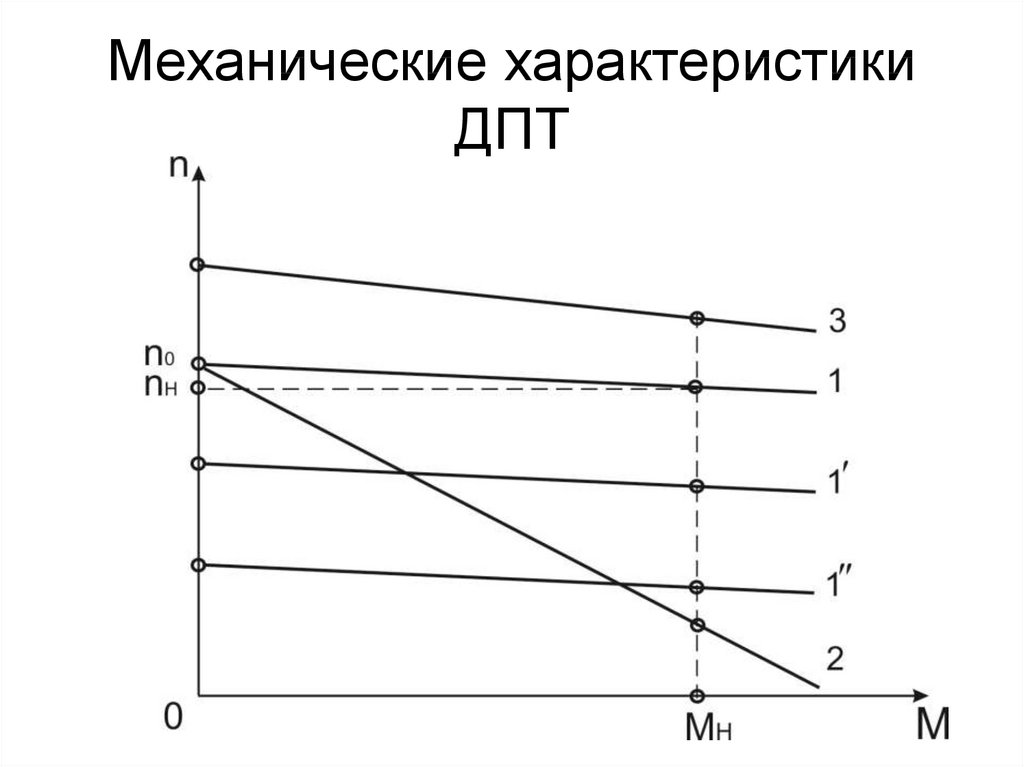 Они обычно используются в промышленных условиях. Помните, что дешевый бесколлекторный двигатель постоянного тока с меньшей вероятностью обеспечит лучшую производительность. Однако высокая цена также не является гарантией лучшей производительности. Выбирайте бренды по умеренной цене.
Они обычно используются в промышленных условиях. Помните, что дешевый бесколлекторный двигатель постоянного тока с меньшей вероятностью обеспечит лучшую производительность. Однако высокая цена также не является гарантией лучшей производительности. Выбирайте бренды по умеренной цене.
Номинальные характеристики двигателя
Это технические характеристики бесщеточного двигателя постоянного тока, которые указывают рабочие характеристики мощности, напряжения, скорости, крутящего момента и т. д. Номинальные значения обычно указываются в листе технических характеристик, указываются на самом двигателе или упоминаются в Интернете на веб-сайте производителя. Наиболее важными из них являются:
- Крутящий момент — Уровни крутящего момента бесщеточного двигателя постоянного тока зависят от условий эксплуатации. Характеристики крутящего момента включают пиковый крутящий момент и постоянный крутящий момент. Пиковый крутящий момент обычно обозначает самое высокое значение в течение короткого периода времени, например, при запуске, а постоянный крутящий момент означает номинальный крутящий момент для любой заданной скорости. Желательно выбрать двигатель, крутящий момент которого соответствует потребностям применения, иначе он будет с трудом перемещать нагрузки.
- Номинальное напряжение — это значение относится к номинальному напряжению на клеммах, которое требуется двигателю для работы. Обычно это указывает производитель. Общие части включают 12В, 24В и 48В. Бесщеточный двигатель постоянного тока 12 В работает от источника 12 В, а для двигателя 48 В требуется источник 48 В. Использование неправильного источника напряжения может привести к тому, что двигатель не будет создавать достаточный крутящий момент или полностью выйдет из строя.
- Мощность Номинальная мощность- номинальная мощность обычно выражается в ваттах. Более высокая номинальная мощность означает более мощный двигатель, и наоборот. Важно выбрать двигатель, номинальная мощность которого достаточно высока для ваших нужд, но не слишком высока, чтобы превзойти потребности приложения. Например, бесщеточный двигатель постоянного тока для радиоуправляемого автомобиля должен поддерживать высокий крутящий момент при низком энергопотреблении.
- Номинальное число оборотов в минуту (скорость) — высокоскоростных приложений требуют двигателя BLDC с более высоким числом оборотов в минуту и наоборот. Обычно скорость указывается Kv и указывается в спецификации. Более высокое число означает более высокий уровень RPM. Чтобы найти максимальную скорость бесщеточного двигателя постоянного тока, умножьте номинал Kv на напряжение.
- Размер обмотки статора. размер обмотки напрямую связан с величиной крутящего момента, при этом больший размер обеспечивает более мощный двигатель. Однако это происходит за счет скорости, и такой двигатель будет достигать только низких пиковых оборотов. Величина этой магнитной фиксации пропорциональна количеству витков катушки. Для правильного выбора рассмотрите возможность баланса между ними.
 Желательно выбрать двигатель, крутящий момент которого соответствует потребностям применения, иначе он будет с трудом перемещать нагрузки.
Желательно выбрать двигатель, крутящий момент которого соответствует потребностям применения, иначе он будет с трудом перемещать нагрузки. Например, бесщеточный двигатель постоянного тока для радиоуправляемого автомобиля должен поддерживать высокий крутящий момент при низком энергопотреблении.
Например, бесщеточный двигатель постоянного тока для радиоуправляемого автомобиля должен поддерживать высокий крутящий момент при низком энергопотреблении.Заключение
Покупка двигателя BLDC требует пристального внимания к нескольким деталям. К ним относятся параметры, описывающие рабочие характеристики двигателя, или технические характеристики бесщеточного двигателя постоянного тока. Сопоставив их с потребностями вашего проекта, вы можете быть уверены, что купите двигатель BLDC, который идеально подходит для предполагаемой цели или использования. Это связано с тем, что двигатели BLDC бывают разных типов, и неправильный выбор может означать провал проекта.
К ним относятся параметры, описывающие рабочие характеристики двигателя, или технические характеристики бесщеточного двигателя постоянного тока. Сопоставив их с потребностями вашего проекта, вы можете быть уверены, что купите двигатель BLDC, который идеально подходит для предполагаемой цели или использования. Это связано с тем, что двигатели BLDC бывают разных типов, и неправильный выбор может означать провал проекта.
12 В 24 В 36 В 48 В Производитель бесщеточных двигателей постоянного тока (BLDC) | Драгоценные камни Мотор
Our largest 12V BLDC motor is GM57BLY95-130 (12V, 100 W, 3000rpm, 0.33Nm, 57mm dia’*95mm length)
Our largest 24V BLDC motor is GM86BLF105-230 (24V, 400W, 3000rpm, 1.28 Нм, 86 мм * 86 мм * 105 мм) и GM60BLF141-230 (24 В, 400 Вт, 3000 об/мин, 1,28 Нм, 60 мм * 60 мм * 141 мм)
110 мм * 110 мм * 170 мм)
GEMS Motor производит и поставляет бесщеточные двигатели NEMA 17 23 34 42 с рамой и метрическим размером 42–110 мм.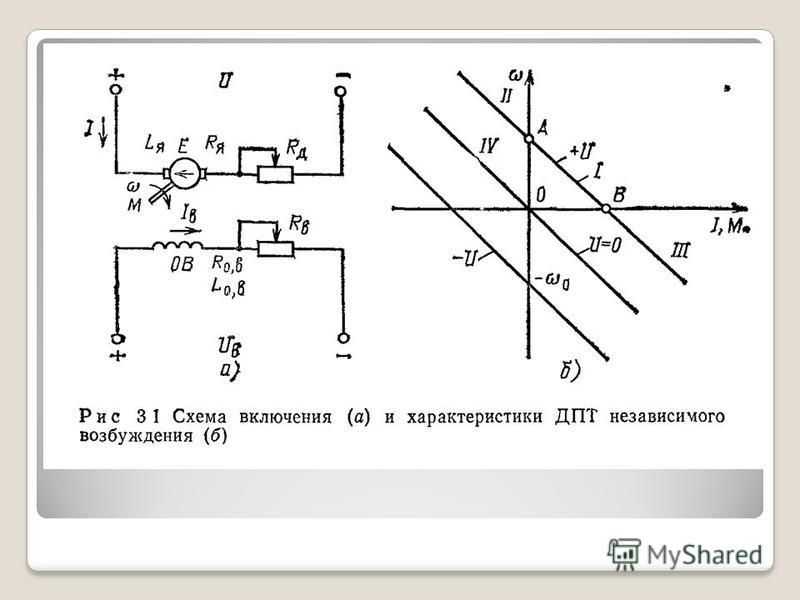 Большинство наших двигателей могут быть специально разработаны для работы с напряжением 12 В, 24 В, 36 В, 48 В или выше. GEMS предлагает различные варианты смазочных материалов и двигатели класса IP65 для экстремальных температур, запыленности и влажности. Встроенные датчики Холла или энкодеры также доступны для приложений, где требуется точная обратная связь по положению и скорости. GEMS Motor также предлагает широкий ассортимент бесщеточных мотор-редукторов и бесщеточных двигателей постоянного тока со встроенным драйвером. Двойной вал и монтажные фланцы доступны по запросу.
Большинство наших двигателей могут быть специально разработаны для работы с напряжением 12 В, 24 В, 36 В, 48 В или выше. GEMS предлагает различные варианты смазочных материалов и двигатели класса IP65 для экстремальных температур, запыленности и влажности. Встроенные датчики Холла или энкодеры также доступны для приложений, где требуется точная обратная связь по положению и скорости. GEMS Motor также предлагает широкий ассортимент бесщеточных мотор-редукторов и бесщеточных двигателей постоянного тока со встроенным драйвером. Двойной вал и монтажные фланцы доступны по запросу.
Бесщеточные двигатели постоянного тока, также известные как бесщеточные двигатели постоянного тока или двигатели постоянного тока, имеют гораздо более длительный срок службы, чем щеточные двигатели постоянного тока, поскольку щетки не изнашиваются. Это дает вам лучшую долгосрочную ценность для ваших инвестиций. Еще одним важным преимуществом бесколлекторных двигателей является их высокий КПД. Бесщеточные двигатели также идеально подходят для приложений, работающих на высоких скоростях, таких как электроинструменты и бесщеточные воздуходувки.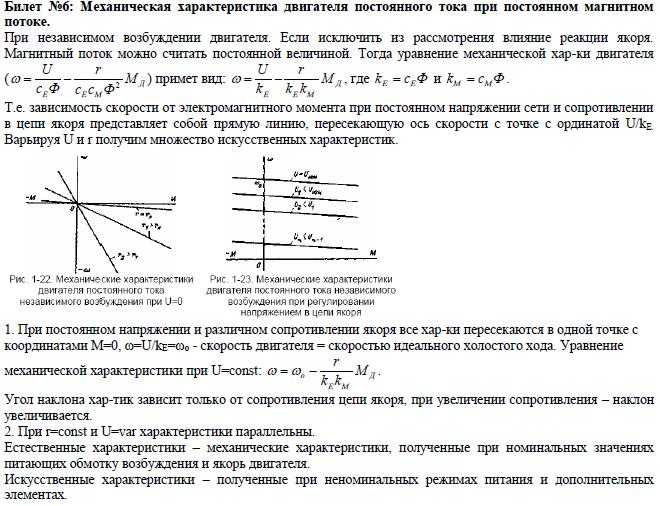 Во многих случаях бесщеточные двигатели изготавливаются многополюсными, например: 4-полюсными или 8-полюсными, что увеличивает крутящий момент за счет скорости. В таких приложениях чрезвычайно высокие обороты не требуются, но желательно иметь высокий крутящий момент. Пожалуйста, проверьте технические характеристики двигателя ниже, чтобы получить информацию о максимальной скорости и крутящем моменте.
Во многих случаях бесщеточные двигатели изготавливаются многополюсными, например: 4-полюсными или 8-полюсными, что увеличивает крутящий момент за счет скорости. В таких приложениях чрезвычайно высокие обороты не требуются, но желательно иметь высокий крутящий момент. Пожалуйста, проверьте технические характеристики двигателя ниже, чтобы получить информацию о максимальной скорости и крутящем моменте.
Бесколлекторный двигатель постоянного тока NEMA 17, 42 мм, от 24 до 48 В [Технический паспорт]
12 В, 24 В, 2000 об/мин 4000 об/мин ~8000 Н·дюйм-9 z06 Н·м 36Oz-in), 13 ~ 105 watts
| Model | GM42BLF 40-128-H | GM42BLF 60-113 | GM42BLF 60-123 | GM42BLF 60-130 | GM42BLF 40-240 | GM42BLF 60-240 | GM42BLF 80-240 | GM42BLF 100-240 | GM42BLF 40-220 | GM42BLF 60-214 | GM42BLF 60-214 | GM42BLF 60-214 | GM42BLF. | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | |||||||||||||
| Количество фаз | 3 фазы | |||||||||||||
| Номинальное напряжение | Volt | 12 | 12 | 12 | 12 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | ||
| Rated speed | RPM | 3000 | 1300 | 2300 | 3000 | 4000 | 4000 | 4000 | 4000 | 2000 | 1400 | 7000 | ||
| Номинальный крутящий момент | Унц-дюйм | 8.9 | 17.7 | 17.7 | 17.7 | 8.9 | 17.7 | 26.9 | 36 | 8.9 | 17.7 | 17.7 | ||
| Nm | 0.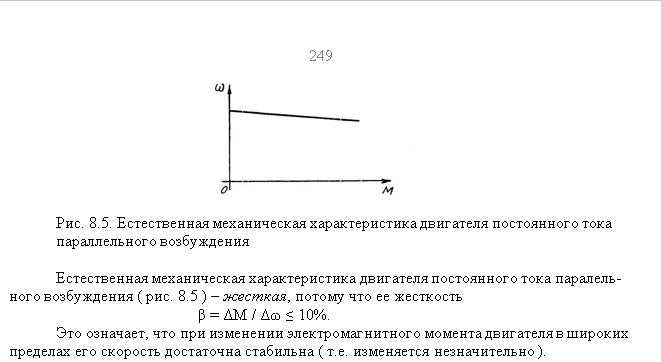 063 063 | 0.125 | 0.125 | 0.125 | 0.063 | 0.125 | 0.19 | 0.25 | 0.063 | 0.125 | 0.125 | |||
| Номинальный ток | А | 2.4 | 2.5 | 4 | 5 | 1.8 | 3.5 | 5.2 | 6.6 | 0.9 | 1.3 | 6.2 | ||
| Rated power | Watt | 20 | 16 | 29 | 38 | 26 | 52 | 79 | 105 | 13 | 18 | 90 | ||
| Пиковый крутящий момент | Унц-дюйм | 26,9 | 53,1 | 53.1 | 53.1 | 26.9 | 53.1 | 80.7 | 107 | 26.9 | 53.1 | 53.1 | ||
| Nm | 0.19 | 0.375 | 0.375 | 0.375 | 0.19 | 0. 375 375 | 0.57 | 0.75 | 0.19 | 0.375 | 0.375 | |||
| Пиковый ток | А | 7,2 | 7 | 11 | 14 | 5,4 | 10,5 | 15,6 | 20 | 2,7 | 3,9 | 83,9 | ||
| Rotor inertia | g.c㎡ | 24 | 48 | 48 | 48 | 24 | 48 | 72 | 96 | 24 | 48 | 48 | ||
| Длина L | мм | 40 | 60 | 60 | 60 | 40 | 60 | 80 | 100 | 40 | 60 | 60 | ||
| Weight | Kg | 0.33 | 0.45 | 0.45 | 0.45 | 0.33 | 0.45 | 0.65 | 0.8 | 0.33 | 0.45 | 0.45 |
*Некоторые модели могут быть специально разработаны для источника питания 12 В 24 В 36 В или 48 В, а номинальная скорость может быть любой от 1000 об/мин до 8000 об/мин
NEMA 23, 57 мм 12 В 24 В 48 В Бесщеточный двигатель постоянного тока [Технические характеристики]
24 В, 1000 об/мин ~ 3000 об/мин, 30 унций на дюйм ~ 115 унций на дюйм (0,2 Нм ~ 0,8 Нм), 2 watts
| Model | GM57BLF59-230 | GM57BLF80-230 | GM57BLF101-230 | GM57BLF122-230 | |
|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | ||||
| Номер фазы | 3 фазы | ||||
| Номинальное напряжение | Вольт | 24 | 24 | 24 | 36 |
| Номинальная скорость | Об/мин | 3000 | 3000 | 3000 | 3000 |
| Номинальный крутящий момент | Унц-дюйм | 28,3 | 56,6 | 85 | 115 |
| Н·м | 0,2 | 0,4 | 0,6 | 0,8 | |
| Номинальный ток | А | 4 | 8 | 12 | 15 |
| Номинальная мощность | Вт | 63 | 125 | 188 | 250 |
| Пиковый крутящий момент | Унц-дюйм | 85 | 170 | 255 | 343 |
| Н·м | 0,6 | 1,2 | 1,8 | 2,4 | |
| Пиковый ток | А | 12 | 23,5 | 36 | 45 |
| Задняя ЭДС | В/КРПМ | 6,23 | 6,3 | 6,3 | 6,3 |
| Инерция ротора | g. c㎡ c㎡ | 120 | 170 | 220 | 270 |
| Длина корпуса | мм | 59 | 80 | 101 | 122 |
| Вес | кг | 0,65 | 1 | 1,4 | 2 |
*Некоторые модели могут быть специально разработаны для питания 12 В 24 В 36 В или 48 В, а номинальная скорость может быть любой от 1000 об/мин до 3000 об/мин
Спецификация]
24 В, 2000 об/мин 4000 об/мин 6000 об/мин, высокоскоростной двигатель постоянного тока, 8 унций на дюйм ~ 64 унции на дюйм (0,055 Нм~ 0,45 Нм), 17 Вт ~ 140 Вт (1/3 л.с.)
| Model | GM57BLY 95-130 | GM57BLY 115-120 | GM57BLY 45-230 | GM57BLY 55-230 | GM57BLY 55-265 | GM57BLY 75-230 | GM57BLY 75-270 | GM57BLY 95-230 | GM57BLY 95-215 | GM57BLY 115-230 | GM57BLY 115-215 | GM57BLY 115-340 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 4 полюса | ||||||||||||
| Количество фаз | 3 фазы | ||||||||||||
| Rated voltage | Volt | 12 | 12 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 36 |
| Rated speed | RPM | 3000 | 2000 | 3000 | 3000 | 6500 | 3000 | 7000 | 3000 | 1500 | 3000 | 1500 | 4000 |
| Rated torque | Oz-in | 48 | 64 | 8 | 16 | 16 | 32 | 32 | 48 | 48 | 64 | 64 | 64 |
| Nm | 0. 33 33 | 0.45 | 0.055 | 0.11 | 0.11 | 0.22 | 0.22 | 0.33 | 0.33 | 0.45 | 0.45 | 0.45 | |
| Rated current | A | 13 | 13 | 1.16 | 2.4 | 4.3 | 4.8 | 10 | 6.6 | 3,3 | 8,6 | 4,3 | 7,6 |
| Rated power | Watt | 100 | 100 | 17 | 35 | 72 | 70 | 154 | 105 | 50 | 140 | 70 | 180 |
| Peak torque | Oz-in | 144 | 144 | 24 | 48 | 48 | 96 | 96 | 144 | 144 | 192 | 192 | 192 |
| Nm | 1 | 1.35 | 0.165 | 0.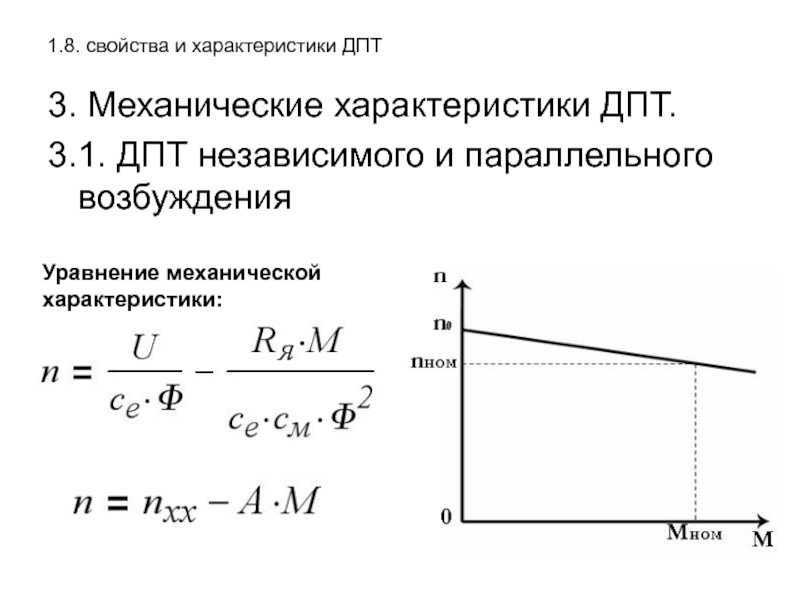 33 33 | 0.33 | 0.66 | 0.66 | 1 | 1 | 1.35 | 1.35 | 1.35 | |
| Peak current | A | 40 | 40 | 3.48 | 7.2 | 12.9 | 14.4 | 30 | 19.8 | 9,9 | 25,8 | 12,9 | 22,8 |
| Rotor inertia | g.c㎡ | 173 | 230 | 32 | 75 | 75 | 119 | 119 | 173 | 173 | 230 | 230 | 230 |
| Длина L | мм | 95 | 115 | 45 | 55 | 55 | 32 3595 | 95 | 115 | 115 | 115 | ||
| Weight | Kg | 1 | 1.25 | 0.33 | 0.44 | 0.44 | 0.75 | 0.75 | 1 | 1 | 1.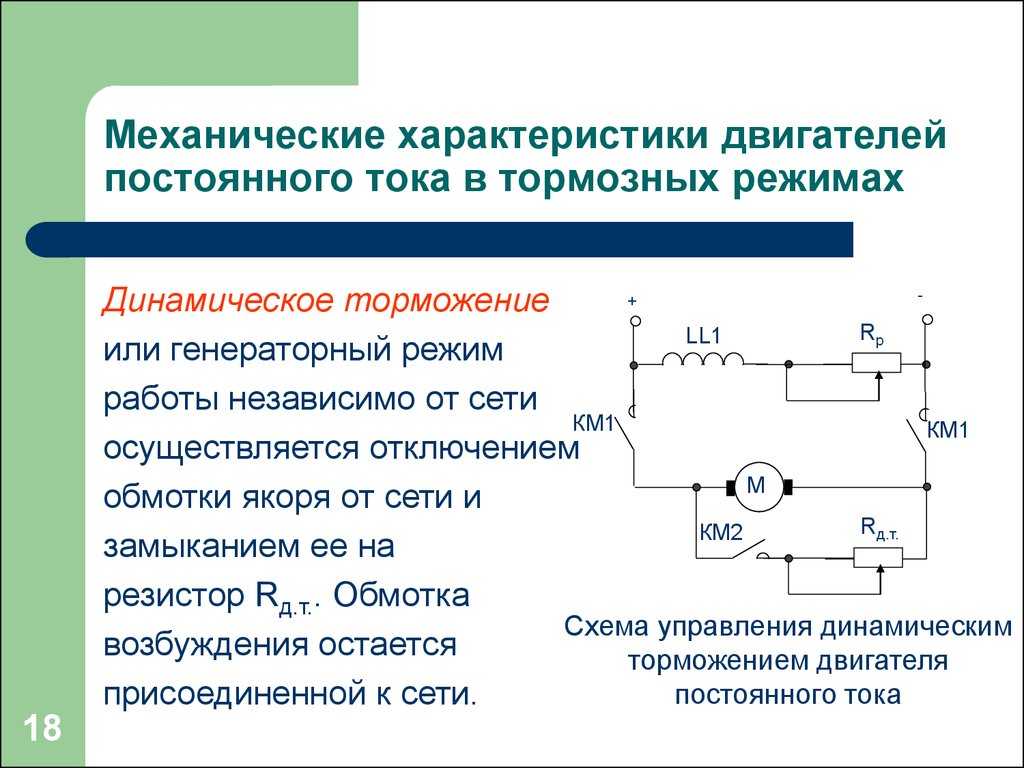 25 25 | 1.25 | 1.25 |
*Некоторые модели могут быть специально разработаны для источника питания 12 В 24 В 36 В или 48 В, а номинальная скорость может быть любой от 2000 об/мин до 6000 об/мин
Бесколлекторный двигатель постоянного тока NEMA 24, 60 мм, 24 В, 48 В [Технический паспорт]
24 В, 48 В, 1000 об/мин 3000 об/мин, 0,3 Нм ~ 1,3 Нм (46 унций-дюйм)
| Model | GM60BLF 78-430 | GM60BLF 99-430 | GM60BLF 99-460 | GM60BLF 120-430 | GM60BLF 120-445 | GM60BLF 140-430 | GM60BLF 78-230 | GM60BLF 99-218 | GM60BLF 99-230 | GM60BLF 120-230 | GM60BLF 120-210 | GM60BLF 141-230 | GM60BLF 120-108 | GM60BLF 99-340 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | 4 | ||||||||||||||
| Количество фаз | 3 фазы | |||||||||||||||
| Rated voltage | Volt | 48 | 48 | 48 | 48 | 48 | 48 | 24 | 24 | 24 | 24 | 24 | 24 | 12 | 36 | |
| Номинальная скорость | Об/мин | 3000 | 3000 | 6000 | 3000 | 4500 | 3000 | 3000 | 1800 | 3000 | 3000 | 1000 | 3000 | 800 | 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 40834 4000 | 800 9083 9083 433 4.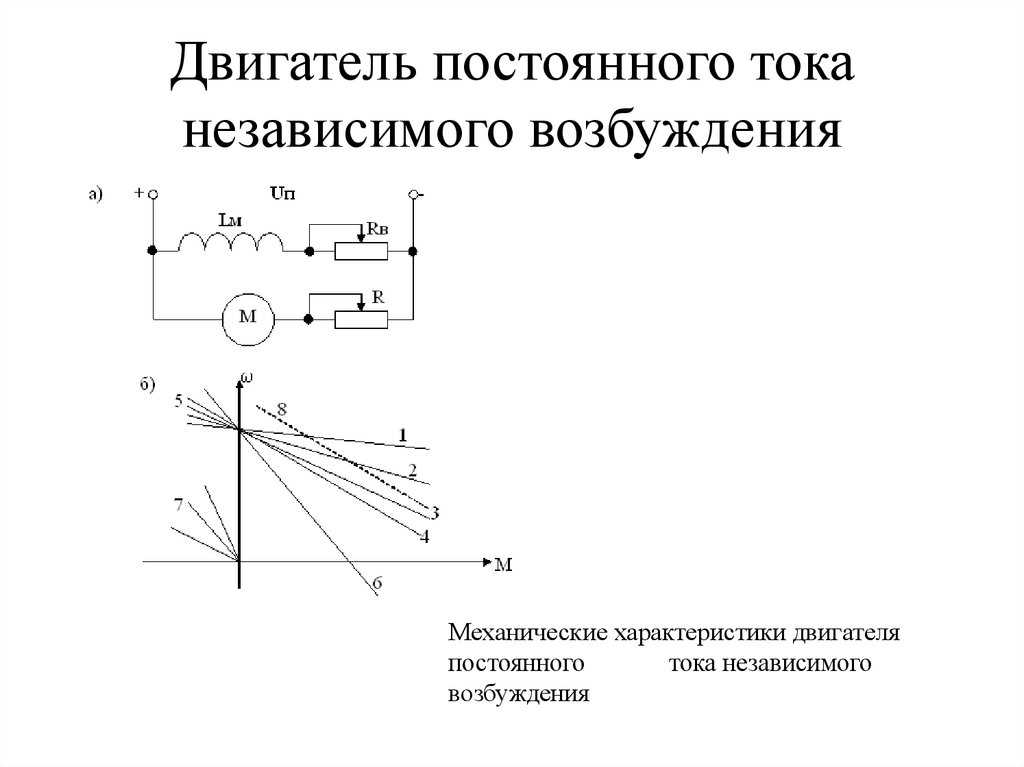 |
| Rated torque | Oz-in | 46 | 93 | 93 | 136 | 136 | 183 | 46 | 93 | 93 | 143 | 143 | 186 | 143 | 93 | |
| Н·м | 0,32 | 0.65 | 0.65 | 0.95 | 0.95 | 1.28 | 0.32 | 0.65 | 0.65 | 1 | 1 | 1.3 | 1 | 0.65 | ||
| Rated current | A | 3.5 | 6.5 | 13 | 9.5 | 14 | 12 | 7 | 7.3 | 12.2 | 15 | 6 | 19 | 8 | 11 | |
| Rated power | Watt | 100 | 200 | 400 | 300 | 450 | 400 | 100 | 120 | 204 | 314 | 100 | 408 | 80 | 260 | |
| Peak torque | Oz-in | 140 | 280 | 280 | 407 | 407 | 550 | 137 | 280 | 280 | 430 | 430 | 557 | 430 | 280 | |
| Nm | 0. 96 96 | 1.95 | 1.95 | 2.85 | 2.85 | 3.84 | 0.96 | 1.95 | 1.95 | 3 | 3 | 3.9 | 3 | 1.95 | ||
| Пиковый ток | А | 10,5 | 19,5 | 39 | 28,5 | 42 | 36 | 20 | 21,9 | 36,5 | 45 | 18 | 57 | 38 9083 | ||
| Rotor inertia | kg.c㎡ | 0.24 | 0.48 | 0.48 | 0.72 | 0.72 | 0.96 | 0.24 | 0.48 | 0.48 | 0.72 | 0.72 | 0.96 | 0.72 | 0,48 | |
| Длина L | mm | 78 | 99 | 99 | 120 | 120 | 141 | 78 | 99 | 99 | 120 | 120 | 141 | 120 | 99 | |
| Weight | Kg | 0. 85 85 | 1.25 | 1.25 | 1.65 | 1.65 | 2.05 | 0.85 | 1.25 | 1.25 | 1.65 | 1.65 | 2 | 1,65 | 1,25 |
*Некоторые модели могут быть специально разработаны для питания 24 В 36 В или 48 В, а номинальная скорость может быть любой от 1000 об/мин до 4000 об/мин
]
48 Вольт, 310 Вольт, 2000 об / мин 4000 об / мин 6000 об / мин.0792
86-460
106-430
126-430
126-450
86-695
106-620
126-620
126-630
 2
2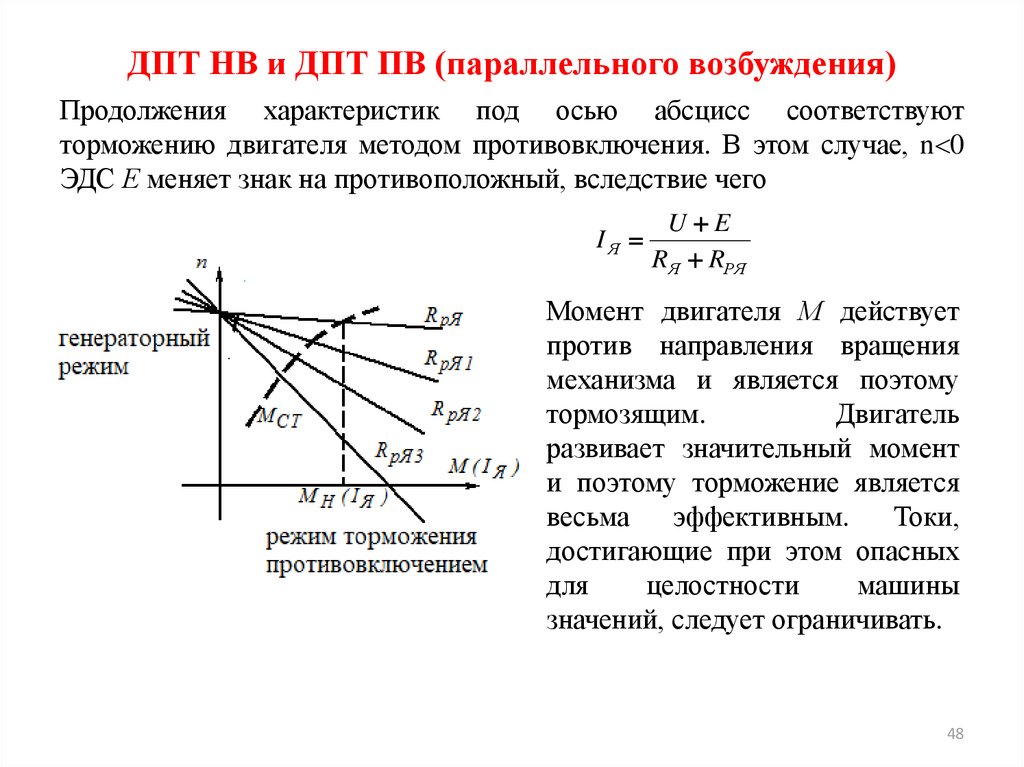 5
5*Некоторые модели могут быть изготовлены по индивидуальному заказу для соответствия источникам питания 24 В 36 В 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 1000 до 6000 об/мин
NEMA 3 Двигатель постоянного тока [Технический паспорт]
24 В, 48 В, 1000 об/мин, 3000 об/мин, 50 унций на дюйм ~ 350 унций на дюйм (0,35 Нм ~ 2,4 Нм), 110 Вт ~ 750 Вт (1 л.с.)
| Model | GM86BLW 80-233 | GM86BLF 75-230 | GM86BLF 90-230 | GM86BLF 105-230 | GM86BLF 115-215 | GM86BLF 75-430 | GM86BLF 90-430 | GM86BLF 105-430 | GM86BLF 115-410 | GM86BLF 115-430 | GM86BLF 145-415 | GM86BLF 145-430 | GM86BLW115-450 | GM86BLF 145-630 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | 4 | |||||||||||||
| Количество фаз | 3 фазы | ||||||||||||||
| Номинальное напряжение | Вольт | 24 | 24 | 24 | 24 | 24 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 310 |
| Rated speed | RPM | 3000 | 3000 | 3000 | 3000 | 1500 | 3000 | 3000 | 3000 | 1000 | 3000 | 1500 | 3000 | 5000 | 3000 |
| Номинальный крутящий момент | Oz-in | 229 | 60 | 136 | 183 | 229 | 60 | 136 | 183 | 229 | 229 | 350 | 350 | 390 | 350 |
| Nm | 1.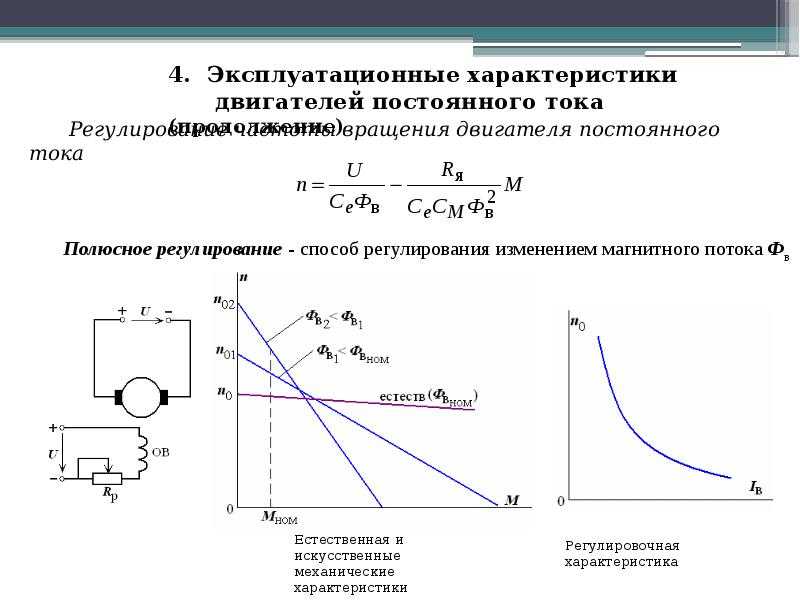 6 6 | 0.42 | 0.95 | 1.28 | 1.6 | 0.42 | 0.95 | 1.28 | 1.6 | 1.6 | 2.4 | 2.4 | 2,7 | 2,4 | |
| Rated current | A | 28 | 8.5 | 15 | 20 | 13 | 4.3 | 8 | 10 | 4.5 | 13 | 11 | 21 | 35 | 3.5 |
| Rated power | Watt | 500 | 130 | 300 | 400 | 250 | 130 | 300 | 400 | 170 | 500 | 370 | 750 | 1400 | 750 |
| Peak torque | Oz-in | 420 | 180 | 408 | 550 | 686 | 180 | 408 | 550 | 686 | 686 | 1000 | 1000 | 1100 | 1000 |
| Н·м | 3 | 1,26 | 2,85 | 3.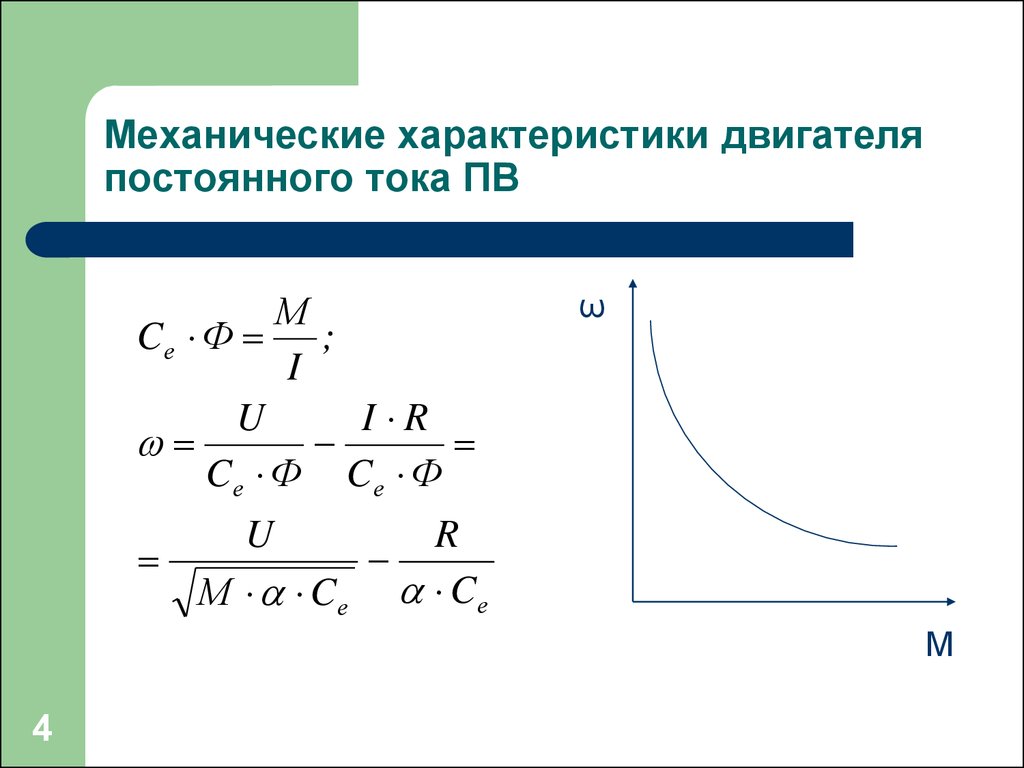 84 84 | 4.8 | 1.26 | 2.85 | 3.84 | 4.8 | 4.8 | 7 | 7 | 8 | 7 | |
| Rotor inertia | kg.c㎡ | 0.8 | 0.4 | 0.8 | 1.2 | 1.6 | 0.4 | 0.8 | 1.2 | 1.6 | 1.6 | 2.4 | 2.4 | 2 | 2,4 |
| Body length L | mm | 80 | 75 | 90 | 105 | 115 | 75 | 90 | 105 | 115 | 115 | 145 | 145 | 115 | 145 |
| Weight | Kg | 2.5 | 1.6 | 2 | 2.6 | 3.2 | 1.6 | 2 | 2.6 | 3.2 | 3.2 | 3.9 | 3,9 | 3,9 | 3,9 |
*Некоторые модели могут быть специально разработаны для источников питания 24 В, 36 В, 48 В, 60 В, 170 В и 325 В, а номинальная скорость может быть любой от 1000 до 3000 об/мин. [Технический паспорт]
[Технический паспорт]
48 В, 2000 об/мин, 4000 об/мин, 6000 об/мин, высокоскоростной двигатель постоянного тока, номинальный крутящий момент 0,7 Н·м ~ 2,5 Н·м (100 унций на дюйм ~ 350 унций на дюйм), 300 Вт (0,4 л.с.) ~ 785 Вт (1 л.с.)
| Model | GM86BLF 80-430 | GM86BLF 105B-430 | GM86BLF 115B-430 | GM86BLF 130-430 | |
|---|---|---|---|---|---|
| Количество полюсов | 4 полюса | ||||
| Количество фаз | 3 фазы | ||||
| Номинальное напряжение | Вольт | 48 | 48 | 48 | 48 |
| Номинальная скорость | Об/мин | 3000 | 3000 | 3000 | 3000 |
| Номинальный крутящий момент | Унц-дюйм | 143 | 258 | 300 | 356 |
| Н·м | 1 | 1,8 | 2,1 | 2,5 | |
| Номинальный ток | А | 8,3 | 14 | 17 | 18,3 |
| Мощность ротора | Вт | 314 | 550 | 640 | 785 |
| Пиковый крутящий момент | Унц-дюйм | 426 | 800 | 900 | 1068 |
| Н·м | 3 | 5,6 | 6,3 | 7,5 | |
| Пиковый ток | А | 25 | 42 | 51 | 55 |
| Задний ЭДС | В/КРПМ | 13,7 | 13,7 | 13,3 | 13,3 |
| Инерция ротора | кгс㎡ | 1,2 | 2,3 | 2,6 | 3,2 |
| Длина корпуса | мм | 80 | 105 | 115 | 130 |
| Вес | кг | 2,3 | 3,4 | 3,8 | 4,3 |
*Некоторые модели могут быть рассчитаны на питание 24 В 36 В 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 2000 об/мин до 4000 об/мин
NEMA 34, 90 мм от 24 В до 325 В бесщеточных двигателей постоянного тока [Листовый лист]
24 Вольт 48 Вольт 325 Вольт, 2000rpm 4000rpm 6000rpm, 1 Нм ~ 2,5 нм (143 ozin ~ 358 Ozin), 315 Watt ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785 ~ 785.
| Модель | GM90BLF 85-230 | GM90BLF 110-430 | GM90BLF2 | |
|---|---|---|---|---|
| Количество полюсов | 4 полюса | |||
| Номер фазы | 3 фазы | |||
| Номинальное напряжение | Вольт | 24 | 48 | 48 |
| Номинальная скорость | Об/мин | 3000 | 3000 | 3000 |
| Номинальный крутящий момент | Унц-дюйм | 143 | 260 | 358 |
| Н·м | 1 | 1,8 | 2,5 | |
| Номинальный ток | А | 18 | 14 | 18,3 |
| Мощность ротора | Вт | 315 | 565 | 785 |
| Максимальный крутящий момент | Унц-дюйм | 430 | 773 | 1073 |
| Н·м | 3 | 5,4 | 7,5 | |
| Пиковый ток | А | 54 | 42 | 55 |
| Задний ЭДС | В/КРПМ | 13 | 13,7 | 13,3 |
| Инерция ротора | кгс㎡ | 1,6 | 2,5 | 3,4 |
| Длина корпуса | мм | 85 | 110 | 135 |
| Вес | кг | 3,5 | 4,5 | 5 |
*Некоторые модели могут быть специально разработаны для питания 24 В 36 В 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 2000 об/мин до 6000 об/мин
NEMA 42, 110 мм 48 В 170 В 325 В бесщеточные двигатели постоянного тока [Лист данных]
48 Вольт 170 Вольт 310 Вольт, 1000RPM 2000RPM 2400RPM 2500RPM 3000RPM, 3,2 -rpm 2000rpm 2400RPM 2500RPM 3000RPM, 3,2.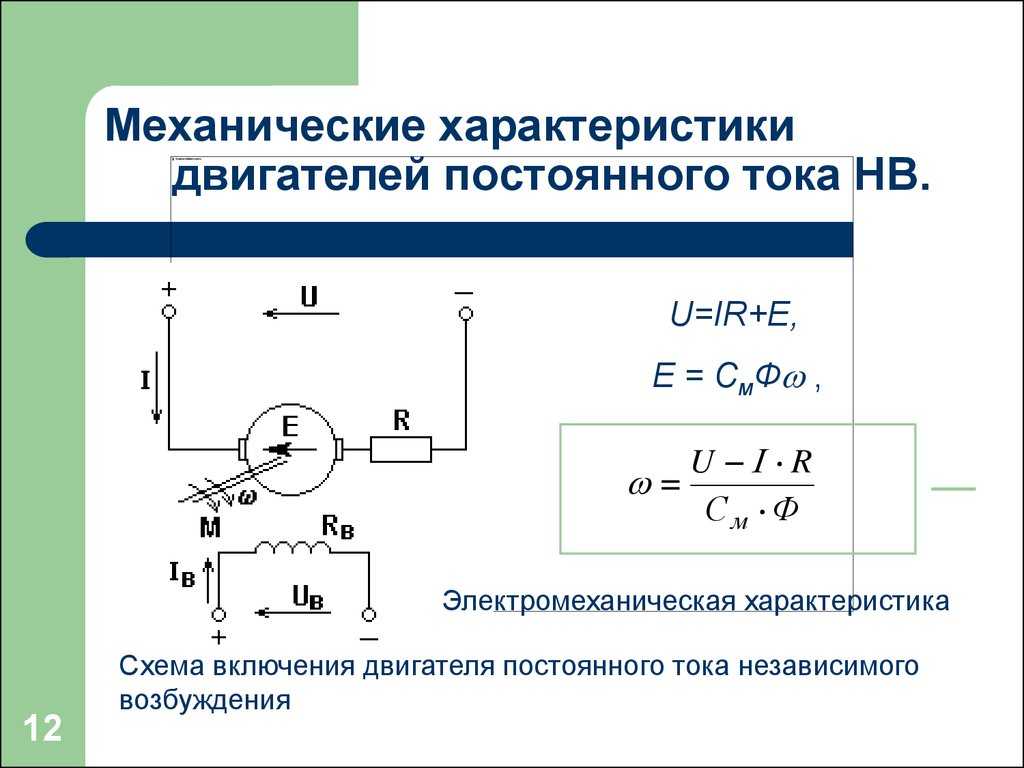 60rpm 2400RPM 2500RPM 3000RPM. ), 1000W ~ 3000W, 1.5 hp ~ 4 hp
60rpm 2400RPM 2500RPM 3000RPM. ), 1000W ~ 3000W, 1.5 hp ~ 4 hp
| Model | GM110BLF 110-430 | GM110BLF 140-430 | GM110BLF 170-430 | GM110BLF 170-415 | GM110BLF 110-630 | GM110BLF 170-630 | GM110BLF 230-630 | GM110BLF 230-730 | |
|---|---|---|---|---|---|---|---|---|---|
| Количество полюсов | 8 полюсов | ||||||||
| Количество фаз | 3 фазы | ||||||||
| Номинальное напряжение | Вольт | 48 | 48 | 48 | 48 | 310 | 310 | 310 | 520 |
| Continuous rated speed | RPM | 3000 | 3000 | 3000 | 1500 | 3000 | 3000 | 3000 | 3000 |
| Continuous rated torque | Oz-in | 455 | 688 | 915 | 915 | 455 | 915 | 1373 | 1373 |
| Н·м | 3,2 | 4,8 | 6,4 | 6,4 | 3,2 | 6,4 | 9,6 | 8,36 | |
| Rated current | A | 28 | 40 | 53 | 27 | 4.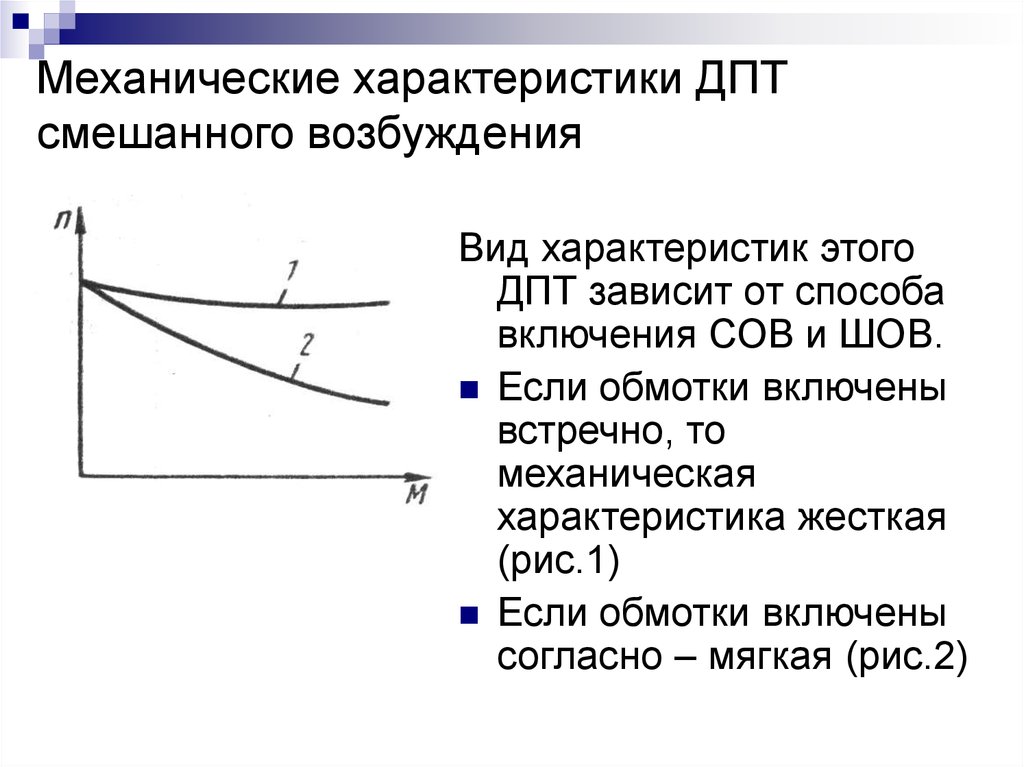 1 1 | 8.2 | 13 | 7.3 |
| Rated power | Watt | 1000 | 1500 | 2000 | 1000 | 1000 | 2000 | 3000 | 3000 |
| Peak torque | Oz-in | 1430 | 2050 | 2860 | 2860 | 1430 | 2860 | 4290 | 4290 |
| нм | 10 | 15 | 20 | 20 | 10 | 20 | 30 | 9333 30. | |
| Пиковый ток | А | 80 | 120 | 150 | 80 | 13 | 25 | 39 | 22 |
| Rotor inertia | Kg.c㎡ | 3 | 4.5 | 6 | 6 | 3 | 6 | 9 | 9 |
| Length L+25mm | mm | 110+25 | 140+25 | 170+25 | 170+25 | 110+25 | 170+25 | 230+25 | 230+25 |
| Масса | кг | 4,5 | 5,8 | 7 | 7 | 4,5 | 7 | 9,5 | 0 8 3
*Некоторые модели могут быть изготовлены по индивидуальному заказу для соответствия источникам питания 48 В 60 В 170 В и 325 В, а номинальная скорость может быть любой от 1000 об/мин до 3000 об/мин.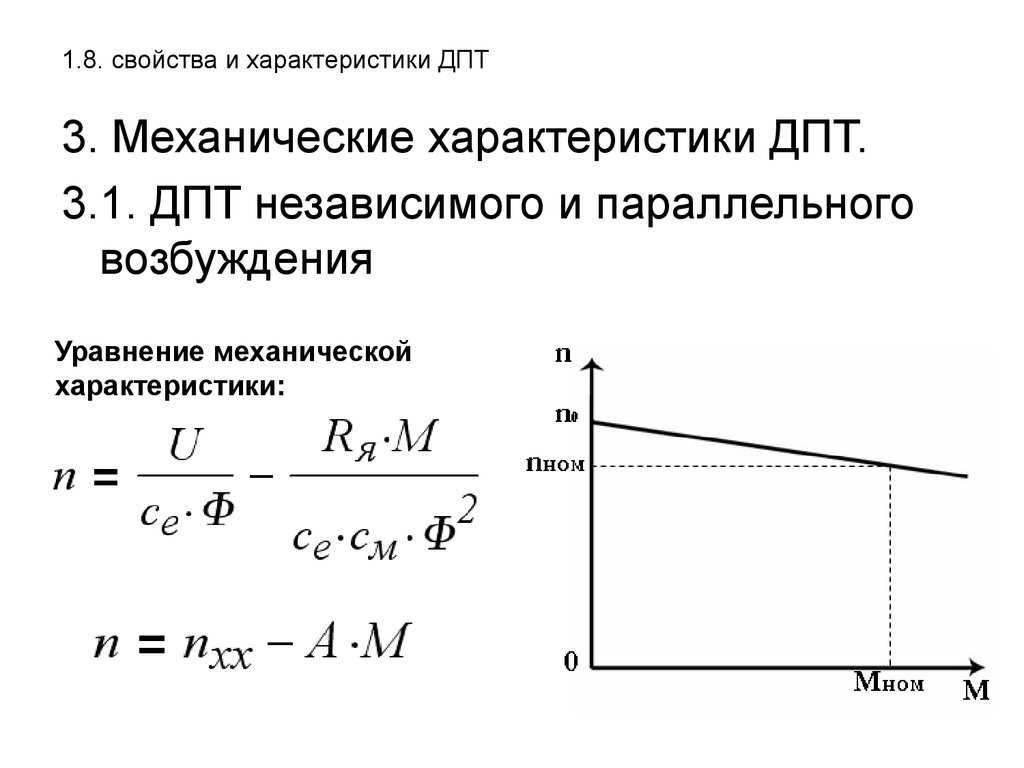 Для фена
Для фена
Щеточный двигатель постоянного тока
RS-555PH
Напряжение: 3–24 В
Применение: Пылесос/ Оборудование для автоматизации офиса / Бытовая техника/ Воздушный компрессор
Технические характеристики двигателя
| Модель | Напряжение | Без нагрузки | При максимальной эффективности | В ларьке | |||||
|---|---|---|---|---|---|---|---|---|---|
| Скорость | Текущий | Скорость | Текущий | Крутящий момент | Выход | Текущий | Крутящий момент | ||
| В | об/мин | А | об/мин | А | г. см см | Вт | А | г.см | |
| РС-555PH-29150 | 12 | 3400 | 0,14 | 2900 | 0,78 | 240 | 7.1 | 4.4 | 1600 |
| RS-555PH-3262 | 12 | 4600 | 0,2 | 3900 | 1,1 | 210 | 8.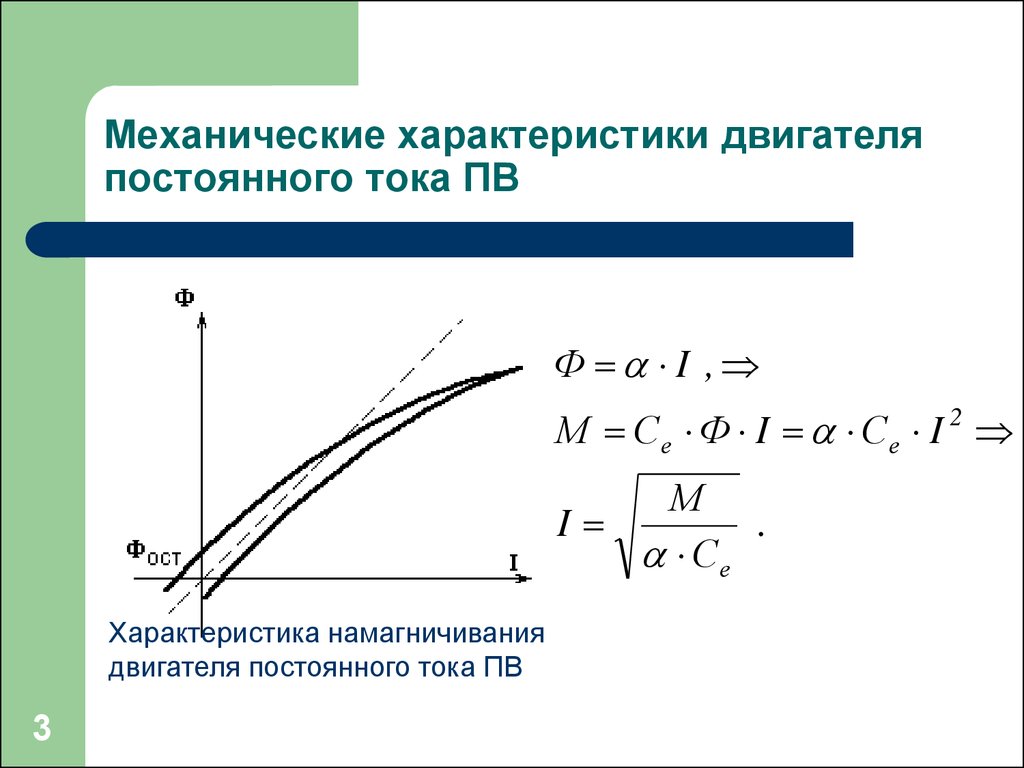 4 4 | 6.11 | 1380 |
| РС-555PH-20115 | 24 | 5000 | 0,096 | 4240 | 0,526 | 212 | 8.44 | 2,88 | 1370 |
| RS-555PH-2983 | 24 | 6600 | 0,16 | 5800 | 1.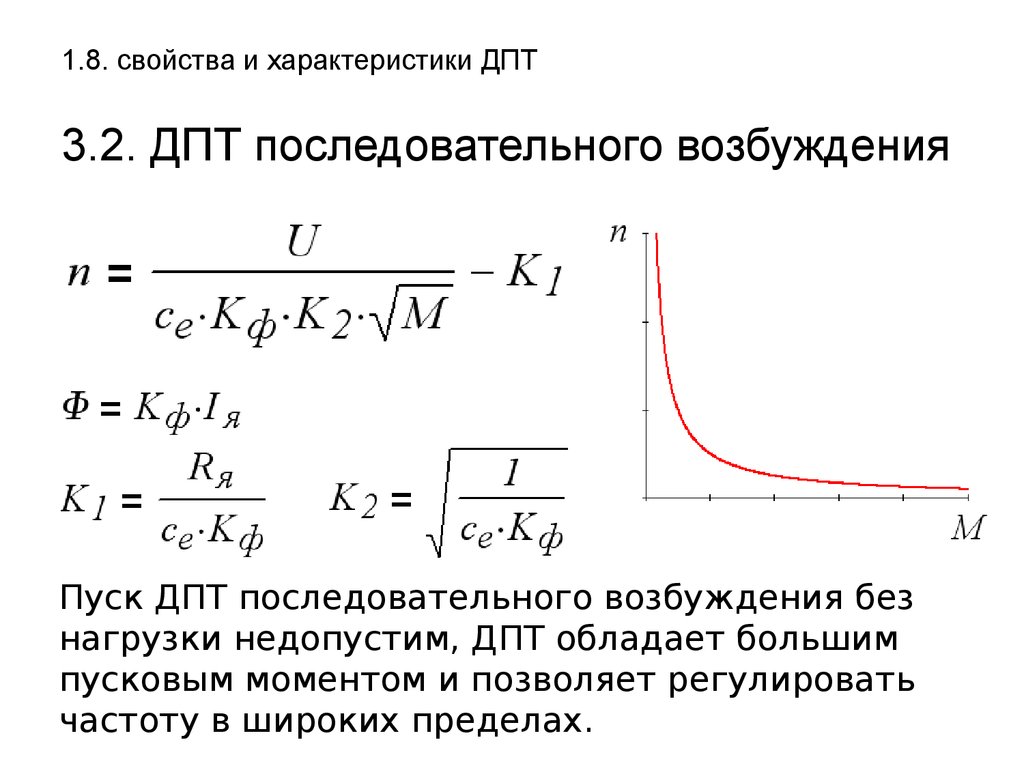 15 15 | 370 | 22,3 | 8 | 3500 |
| RS-555PH-6532 | 12 | 16000 | 0,9 | 14300 | 7,8 | 480 | 70,4 | 65,8 | 4510 |
| RS-555PH-7512 | 7. 2 2 | 14600 | 1,45 | 12600 | 10.2 | 400 | 51,7 | 65,3 | 2920 |
| RS-555PH-24135 | 24 | 3800 | 0,12 | 3374 | 0,32 | 163 | 5,65 | 3. 41 41 | 2097 |
Габаритный чертеж
Кривые производительности
Двигатели постоянного тока 24 В — небольшие двигатели постоянного тока для хобби и мастерских
Домашняя страница Моторы Двигатели постоянного тока 24 В
Увеличить изображение | Марка производителя
(ТО) 7K00011
Tohoku Ricoh мотор-блин. 24 В постоянного тока, мощность 55 Вт. Вал 1-1/8 дюйма L, диаметр 0,24 дюйма. Корпус 4,12 x 4,12 дюйма, общая высота 3 дюйма. 4 монтажных отверстия без резьбы. Номер Ricoh: 52155301.
35 долл. США за штуку — 31,50 долл. США (5+)
Увеличить изображение
(MOT) FYQM33700-51
Colman Двигатель постоянного тока 24 В. 6000 об/мин. 1,257 «Д x 1,786» Д + вал. Вал 0,125 «Д x 0,415» Д. 1-дюймовые монтажные центры на 6-32 метчиках.
Вал 0,125 «Д x 0,415» Д. 1-дюймовые монтажные центры на 6-32 метчиках.
5 долл. США за штуку — 4,35 долл. США (10+)
Увеличить изображение
(MOT) FYQM-73400-51
Colman Двигатель постоянного тока 24 В. 63525 об/мин. x 2,22″L + вал. 0,125″D x 0,410″L вал. Монтажный центр 1″ на метчиках головки 6-32.
$9,95 шт. — 8,25 долл. США (10+), 7,50 долл. США (50+)
Увеличить изображение
(MOT) 6-R34-8MJC
Canon Электродвигатель постоянного тока для принтеров Canon. 18 — 24 В постоянного тока. Корпус 1,61 «Д x 1,35″ В. Вал 0,178» (2 мм), длина 9 мм. Четыре резьбовых монтажных отверстия на лицевой стороне. Сделано в Японии. ПРИМЕЧАНИЕ : Эта партия имеет несколько эквивалентов, мы можем заменить другой номер модели, но это будет тот же двигатель, что и на рисунке.
*** ПРОДАНО ***
Увеличить изображение
(ТО) GM225
Oster Двигатель постоянного тока.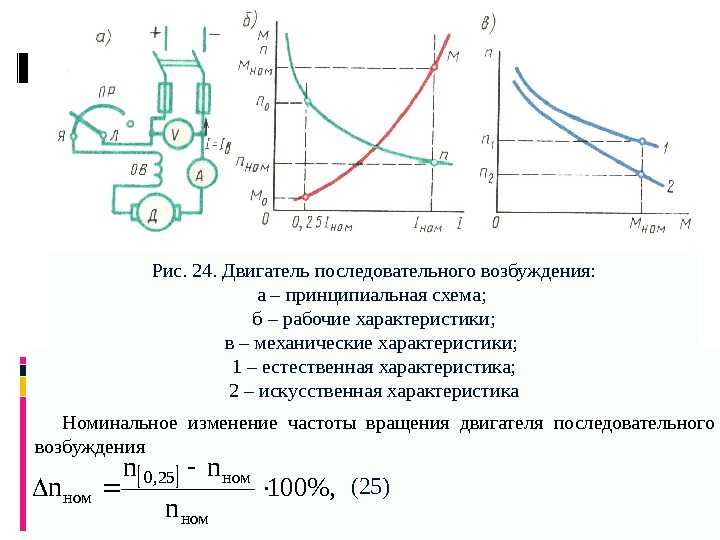 26 В постоянного тока, 14 000 об/мин, 1/2 унции. в.
26 В постоянного тока, 14 000 об/мин, 1/2 унции. в.
- Размеры корпуса : диаметр 1-1/8″ x 2-1/4″
- Размеры вала : диаметр 0,164 дюйма x шлицевой вал 0,287 дюйма
75 долл. США за штуку
Увеличить изображение
Щелкните здесь для просмотра файла в формате PDF
(MOT) 429A6004
TRW Globe Motors Двигатель постоянного тока с постоянными магнитами и тахогенератором. Выходная мощность генератора приблизительно соответствует напряжению питания при любой конкретной частоте вращения. Предназначен для использования в коммерческих 8-дорожечных магнитофонах. Крепится к передним резьбовым отверстиям в центре с шагом 1 дюйм.
Технические характеристики двигателя:
• Для : 24 В постоянного тока
• Размеры корпуса : диаметр 1-1/4 дюйма x длина 2-1/8 дюйма
• Размеры вала : диаметр 0,098 дюйма x длина 3/8 дюйма.
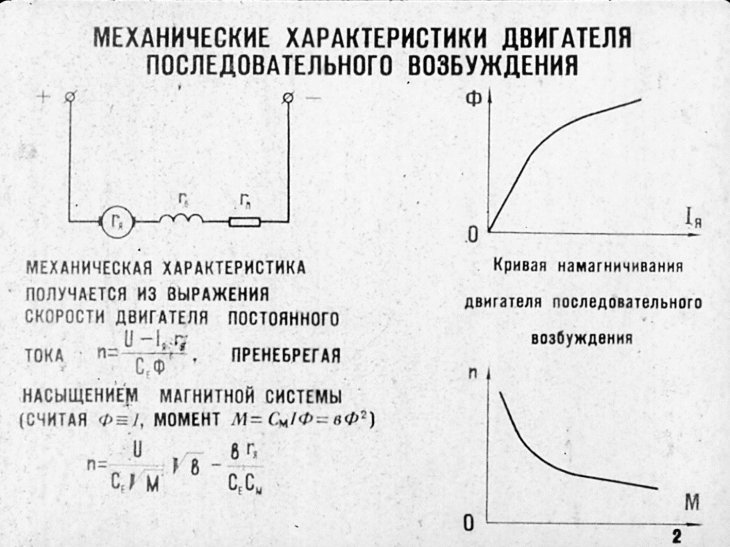 Шкив запрессован (подходит для ремня шириной 1/4″).
Шкив запрессован (подходит для ремня шириной 1/4″).5 долл. США за штуку — 4,50 долл. США (500+)
Увеличить изображение
(ТО) HF263G
Johnson Двигатель постоянного тока. 24 В постоянного тока, 60 мА (без нагрузки). 18 мм (0,709 дюйма) x 23,3 мм (0,923 дюйма), общая длина 1,344 дюйма. Вал с круглыми канавками 2 мм (0,775 дюйма) x 9 мм (0,368 дюйма). 2 монтажных отверстия на лицевой стороне, 15,5 мм c-c. Внешний доступ к щеткам. 30 000+
40 центов за штуку — 33 цента (10+), 28 центов (100+),
23 цента (500+),
20¢ (2,5k+), 15¢ (10k+)
Увеличить изображение
(MOT) B54737-G1
Снова в наличии! Двигатель постоянного тока. 12 — 24 В постоянного тока. Включает конденсатор RF Interonics Bay Shore, 0,22 мкФ, 100 В. Корпус диаметром 3 дюйма x 3,15 дюйма (+ валы). Сквозной вал диаметром 5/16 дюйма, «D» x 5/8 дюйма x 1 дюйм. NSN: 6105-01-127-5200. ПРИМЕЧАНИЕ : Может иметь маркировку: B54735-G1.
15 долларов США за штуку
Дополнительные изображения
(MOT) G26/400R
Dunkermotoren Двигатель постоянного тока с постоянными магнитами, управляемый регулятором. Нет тока нагрузки.
Технические характеристики двигателя:
• Номинал для : 3–30 В постоянного тока
• Управление регулятором регулируемое 2850-3200 об/мин
• 20 мА. Максимум. постоянный крутящий момент 85 PCM
• Опрокидывающий крутящий момент : 5 унций на дюйм.
• Скорость без регулятора : 20 000 об/мин при 350 мА.
• Размеры корпуса : диаметр 1,30 дюйма x длина 3 дюйма
• Размеры вала : номинальный размер 0,080 дюйма (0,0785 дюйма) x длина 0,375 дюйма.

$15 за штуку — $12 (5+)
Увеличить изображение
(MOT) F54R02
Yale Двойной двигатель постоянного тока. 18 — 24 В постоянного тока. Сделано для магнитофонов 1970-х годов. Ременный шкив с установочным винтом на валу 2 мм. 1-1/2 дюйма x 1-3/8 дюйма.
1,50 долл. США за штуку — 1,25 долл. США (10+), 1,10 долл. США (50+)
Увеличить изображение
(MOT) 403A185
TRW Globe Motors Двигатель постоянного тока.
Технические характеристики двигателя:
• Номинал : 24 В постоянного тока, 165 мА, 5500 об/мин, без нагрузки.
• Stall Torque : 15 унций на дюйм при 3 А.
• Константа крутящего момента : 5,5 унций на дюйм. / амп.
• Сопротивление якоря : 8,3 Ом
• Размеры корпуса : диаметр 1-1/2 дюйма x длина 2-5/8 дюйма
• Размеры вала : диаметр 0,1562 дюйма x длина 5/16 дюйма с плоской поверхностью.
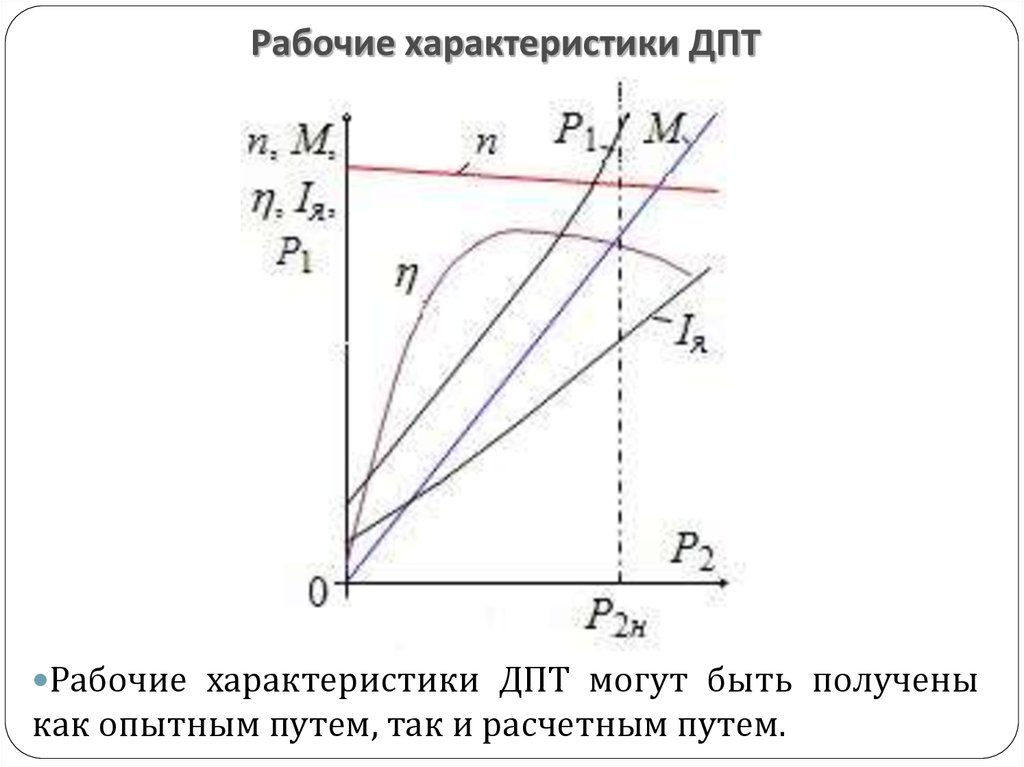 Крепление для лица с четырьмя резьбовыми отверстиями
Крепление для лица с четырьмя резьбовыми отверстиями*** ПРОДАНО ***
Увеличить изображение | Вид с торца
(MOT) P5B15
Western Gear Двигатель постоянного тока. обратимый. 27 В постоянного тока, 0,006 л.с., 11 200 об/мин. 1,25 «Д х 1,9Корпус 3 дюйма. Шлицевой вал 0,164 дюйма x 0,265 дюйма. Монтажные центры 0,626 дюйма, (4) резьбы 4–40. ХОРОШО.
25$ за штуку — 22,50$ (6+), 20$ (25+)
Увеличить изображение | Крупный план этикетки
(MOT) 2613
Northfield Electric Motor Co . Двигатель постоянного тока. 27,5 В, 2,5 А, 0,044 л.с., 7400 об/мин. Междунар. долг. 1,5 «Д x 2,67″ Д. Шестерня D 0,370″ с 16 зубьями. Монтажные центры 0,85″ x 1,056» на 3 резьбовых отверстиях. NSN: 6105-635-9503.
35 долл. США за штуку
Другие изображения
(MOT) 2317-1
Motordyne, Inc. Двигатель постоянного тока с двойным передним и задним валами.
НСН: 5901-00-740-3260.
- Технические характеристики двигателя : 27,5 В пост. тока, 1,2 А, 4500 об/мин, 40°, непрерывный режим, 1/50 л.с.
- Размеры переднего вала : 0,246 дюйма в диаметре, 90°, один угол квадратный, 0,98 дюйма L
- Размеры заднего вала : 0,185 дюйма в диаметре, 90°, один угол квадратный, 0,84 дюйма L
- Размеры корпуса : диаметр 2-1/4 дюйма x длина 4 дюйма
$169 за штуку
Увеличить изображение | Крупный план этикетки
(MOT) 564666
Emerson ART-13 моторный самолет постоянного тока. 28 В постоянного тока, 3,1 А, 120 л.с., 3900 об/мин. Изготовлен для АН/АРТ-13. Рама 2-1/2″Д x 4-3/8″Д. Вал 1/4 дюйма D, длина 0,58 дюйма. Монтажные центры 1-1/2″ x 4″. Около 1950-х годов. В коробке. Хорошее состояние.
39 долл.