
Двигатель постоянного тока — это… Что такое Двигатель постоянного тока?
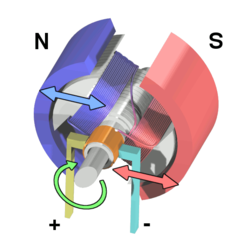
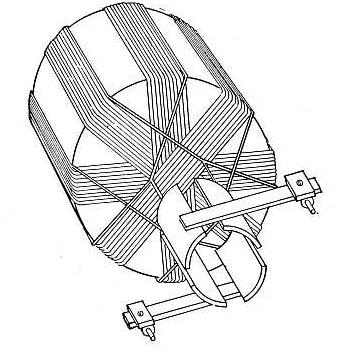
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
История
Краткое описание коллекторного двигателя постоянного тока
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  — число витков обмотки ротора,
— число витков обмотки ротора,  — индукция магнитного поля полюсов статора,
— индукция магнитного поля полюсов статора,  — ток в обмотке ротора [А],
— ток в обмотке ротора [А], 
 — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
— расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
— синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],  — угловая скорость [рад/сек],
— угловая скорость [рад/сек], 
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
 , где n — число щёток, alfa — угловая ширина одной щётки [радиан].
, где n — число щёток, alfa — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):

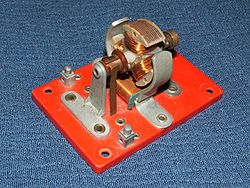
Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор
На статоре ДПТ располагаются в зависимости от конструкции:
- постоянные магниты
- электромагниты с обмотками возбуждения — катушки, наводящие магнитный поток возбуждения
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Ротор
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две «мёртвые точки» из которых невозможен самозапуск двигателя.
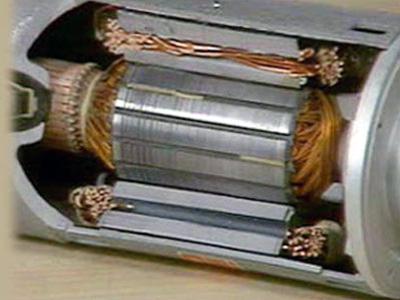
Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  — масса цилиндра (ротора), а
— масса цилиндра (ротора), а  — радиус цилиндра (ротора).
— радиус цилиндра (ротора).
Коллектор (коллекторный узел, щёточный узел, коллекторно-щёточный узел, щёточно-коллекторный узел)
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции — является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
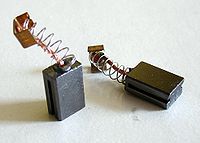
Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Классификация
- По виду магнитной системы статора
- С постоянными магнитами
- С электромагнитами
- По способу включения обмоток возбуждения электромагнитов статора
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Принцип работы
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
Рамка с током в однородном магнитном поле полюсов статора
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где — радиус рамки, и создают крутящий момент
, где — радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора 
 , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Две рамки с током в однородном магнитном поле полюсов статора
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Две рамки с током в неоднородном магнитном поле полюсов статора
Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где — масса цилиндра (ротора), — радиус цилиндра (ротора).
, где — масса цилиндра (ротора), — радиус цилиндра (ротора).
Взаимодействие магнитных полей
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  — число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
— число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  — число щёток, — угловая ширина одной щётки (рад),
— число щёток, — угловая ширина одной щётки (рад),  — число пи (3,14…).
— число пи (3,14…).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  — угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
— угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где — угловая ширина одной щётки.
, где — угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Другие виды электродвигателей постоянного тока
Применение
- Электропривод тепловозов, теплоходов, карьерных самосвалов
- Стартёры автомобилей, тракторов и др. Для уменьшения номинального напряжения двигателя в автомобильных стартёрах применяют двигатель постоянного тока с четырьмя щётками, при этом эквивалентное комплексное сопротивление ротора уменьшается почти в четыре раза, при этом статор имеет четыре полюса (две пары полюсов). Пусковой ток в автомобильных стартёрах около 200 ампер. Режим работы — кратковременный.
Бесколлекторные, с электронным переключателем тока
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Управление ДПТ
Механическая характеристика ДПТ
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика ДПТ
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Управление ДПТ
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  — ток в обмотке якоря,
— ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  — напряжение, приложенное к обмотке ротора,
— напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства и недостатки ДПТ
Достоинства:
- Простота устройства и управления
- Практически линейные механическая и регулировочная характеристики двигателя
- Легко регулировать частоту вращения.
- Хорошие пусковые свойства (большой пусковой момент).
Недостатки:
- Необходимость профилактического обслуживания коллекторно-щёточных узлов
- Ограниченный срок службы из-за износа коллектора
См. также
Ссылки
Wikimedia Foundation. 2010.
Двигатель постоянного тока
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
Электродвигатели постоянного тока, намного меньше распространены, нежели двигатели переменного тока. Это связано в первую очередь со сравнительной дороговизной, более сложным устройством, сложностями в обеспечении питания. Но, несмотря на все эти недостатки, ДПТ имеют немало плюсов. Например, двигатели переменного тока, сложно регулировать, ДПТ же отлично регулируются массой способов. Кроме того ДПТ имеют более жесткие механические характеристики и позволяют обеспечить большой пусковой момент.
Электродвигатели постоянного тока применяются в качестве тяговых двигателей, в электротранспорте, в качестве различных исполнительных устройств.
Устройство двигателей постоянного тока

Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Принцип действия

Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнит с полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле

Где Ф – магнитный поток возбуждения, n – частота вращения, а Cе это конструктивный момент машины, который остается для нее постоянным.
Напряжение на зажимах больше чем противоЭДС на величину падения напряжение в якорной цепи.

А если домножить это выражение на ток, то получим уравнение баланса мощностей.

Левая часть уравнения UIя представляет собой мощность подаваемая электродвигателю, в правой части первое слагаемое EIя представляет собой электромагнитную мощность, а второе I
Рекомендуем прочесть статью — пуск двигателя постоянного тока.
Конструкция электродвигателя постоянного тока: видео — Asutpp
Как известно, электродвигатель постоянного тока – это устройство, которое с помощью двух своих основных деталей конструкции может преобразовывать электрическую энергию в механическую. К таким основным деталям относятся:
- статор – неподвижная/статическая часть двигателя, которая вмещает в себе обмотки возбуждения на которые поступает питание;
- ротор – вращающаяся часть двигателя, которая отвечает за механические вращения.
Кроме вышеупомянутых основных деталей конструкции электродвигателя постоянного тока, существуют также и вспомогательные детали, такие как:
- хомут;
- полюса;
- обмотка возбуждения;
- обмотка якоря;
- коллектор;
- щётки.
 Конструкция электродвигателя постоянного тока
Конструкция электродвигателя постоянного токаВ совокупности все эти детали составляют цельную конструкцию электродвигателя постоянного тока. А теперь давайте более подробно рассмотрим основные детали электродвигателя.
Ярмо ДПТ
 Ярмо ДПТ
Ярмо ДПТЯрмо электродвигателя постоянного тока, которое изготавливают в основном из чугуна или стали, является неотъемлемой частью статора или статической частью электродвигателя. Его основная функция состоит в формировании специального защитного покрытия для более утончённых внутренних деталей двигателя, а также обеспечение поддержки для обмотки якоря. Кроме того, ярмо служит защитным покрытием для магнитных полюсов и обмотки возбуждения ДПТ, обеспечивая тем самым поддержку для всей системы возбуждения.
Полюса
 Полюса двигателя постоянного тока
Полюса двигателя постоянного токаМагнитные полюса электродвигателя постоянного тока – это корпусные детали, которые крепятся болтами к внутренней стенке статора. Конструкция магнитных полюсов содержит в своей основе только две детали, а именно – сердечник полюса и полюсный наконечник, которые состыкованы друг к другу под влиянием гидравлического давления и прикреплённые к статору.
Видео: Конструкция и сборка электродвигателя постоянного тока
Несмотря на это, эти две части предназначены для разных целей. Полюсный сердечник, например, имеет маленькую площадь поперечного сечения и используется, чтобы удерживать полюсный наконечник на ярмо, тогда как полюсный наконечник, имея относительно большую площадь поперечного сечения, используется для распространения магнитного потока созданного над воздушным зазором между статором и ротором, чтобы уменьшить потерю магнитного сопротивления. Кроме того, полюсный наконечник имеет множество канавок для обмоток возбуждения, которые и создают магнитный поток возбуждения.
Обмотка возбуждения
 Обмотка возбуждения
Обмотка возбужденияОбмотки возбуждения электродвигателя постоянного тока выполнены вместе с катушками возбуждения (медный провод) навитыми на канавки полюсных наконечников таким образом, что когда ток возбуждения проходит сквозь обмотку, у смежных полюсов возникает противоположная полярность. По существу, обмотки возбуждения выступают в роли некоего электромагнита, способного создать поток возбуждения, внутри которого вращался бы ротор электродвигателя, а потом легко и эффективно его остановить.
Обмотка якоря
 Обмотка якоря электродвигателя постоянного тока
Обмотка якоря электродвигателя постоянного токаОбмотка якоря электродвигателя постоянного тока прикреплена к ротору или вращающейся части механизма, и, как результат, попадает под действие изменяющегося магнитного поля на пути его вращения, что напрямую приводит к потерям на намагничивание.
По этой причине ротор делают из нескольких низко-гистерезисных пластин электротехнической стали, чтобы снизить магнитные потери, типа потери на гистерезис и потери на вихревые токи соответственно. Ламинированные стальные пластины состыковывают друг к другу, чтобы тело якоря получило цилиндрическую структуру.
Тело якоря состоит из канавок (пазов), сделанных из того же материала, что и сердечник, к которому закреплены обмотки якоря и несколько равномерно распределённых по периферии якоря витков медного провода. Пазы канавок имеют пористые клинообразные спаи, чтобы в последствие источаемой во время вращения ротора большой центробежной силы, а также при наличии тока питания и магнитного возбуждения, предотвратить загибания проводника.
Существует два типа конструкции обмотки якоря электродвигателя постоянного тока:
- петлевая обмотка (у данном случае количество параллельных путей тока между переходниками (А) равно количеству полюсов (Р), то есть А = Р.
- волновая обмотка (у данном случае количество параллельных путей тока между переходниками (А) всегда равно 2, независимо от количества полюсов, то есть конструкции машины выполнены соответствующим образом).
Коллектор
 Коллектор ДПТ
Коллектор ДПТКоллектор электродвигателя постоянного тока – это цилиндрическая структура из состыкованных между собой, но изолированных слюдой, медных сегментов. Если речь идет об ДПТ, то коллектор здесь используется в основном как средство коммутирования или передачи через щётки электродвигателя тока питания от сети на смонтированные во вращающейся структуре обмотки якоря.
Щётки
 Щётки электродвигателя постоянного тока
Щётки электродвигателя постоянного токаЩётки электродвигателя постоянного тока изготавливают из углеродных или графитных структур, создавая над вращающимся коллектором скользящий контакт или ползунок. Щётки используют для передачи электрического тока от внешнего контура на вращающуюся форму коллектора, где дальше он поступает на обмотки якоря. Коллектор и щётки электродвигателя используют, в общем, для передачи электрической энергии от статического электрического контура на область с механическим вращением, или просто ротор.
Принцип работы двигателя постоянного тока
Принцип работы двигателя постоянного тока основан на использовании явления электромагнитного взаимодействия (правило левой руки).
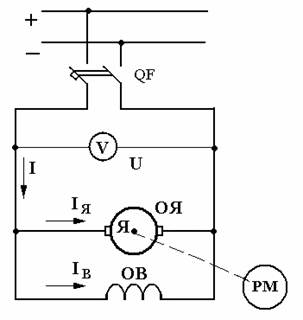
Для запуска двигателя постоянного тока обе его обмотки – обмотка возбуждения (ОВ) и обмотка якоря (ОЯ) с помощью рубильника, пускателя или другой пусковой аппаратуры включается в питающую сеть постоянного тока на номинальное напряжение U = U ном .
Протекающий по обмотке возбуждения ток возбуждения I В создаёт в статоре магнитный поток возбуждения Ф В , пронизывающий обмотку якоря.
Протекающий по обмотке якоря ток якоря I Я взаимодействует с магнитным потоком возбуждения статора Ф В , в результате чего возникают электромагнитные силы F, действующие на проводники якоря и создающие вращающий электромагнитный момент
М = cM Ф В I Я .
NB. cM — константа момента, определяемая конструкцией электродвигателя.
Под действием вращающего электромагнитного момента М якорь двигателя приходит во вращение и по окончании разгона ротор вращается с частотой
n = ( U – R Я I Я ) / сЕ Ф В .
NB. сЕ — константа ЭДС, определяемая конструкцией электродвигателя;
RЯ IЯ — падение напряжения в обмотке якоря.
 При
вращении ротора двигателя проводники
обмотки якоря пересекают магнитные
силовые линии потока возбуждения статора
Ф В в результате чего в обмотке якоря
наводится ЭДС (правило правой руки)
При
вращении ротора двигателя проводники
обмотки якоря пересекают магнитные
силовые линии потока возбуждения статора
Ф В в результате чего в обмотке якоря
наводится ЭДС (правило правой руки)
Е = сЕ Ф В n .
Наведённая в обмотке якоря ЭДС E направлена против приложенного к якорю напряжения (противо-ЭДС) и работа двигателя описывается уравнением электрического равновесия
U = E + RЯ IЯ .
При этом ток, потребляемый якорем двигателя из сети, или рабочий ток двигателя определяется уравнением
IЯ = (U — E)/ RЯ
Электрическая схема двигателя постоянного тока с параллельным возбуждением (РМ — рабочая машина)
30. Основные характеристики электродвигателей постоянного тока. Способы пуска и регулирования частоты вращения. Реверсирование и способы электрического торможения электродвигателей постоянного тока.
Основные характеристики двигателя постоянного тока с параллельным возбуждением
Свойства двигателей постоянного тока в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с независимым, параллельным, последовательным и смешанным возбуждением. В настоящее время в промышленности наиболее широкое применение получили двигатели с параллельным возбуждением.
В двигателе с параллельным возбуждением обмотка возбуждения подключена к питающей сети параллельно с обмоткой якоря. В цепь обмотки возбуждения последовательно включается регулировочный реостат RРР, а в цепь якоря — пусковой RПР или регулировочный R* реостат. Характерной особенностью двигателя является то, что ток возбуждения IB не зависит от тока якоря IЯ (тока нагрузки), т. е. при неизменном сопротивлении в цепи обмотки возбуждения, ток возбуждения постоянен IB = const.
Поэтому, пренебрегая размагничивающим действием реакции якоря, можно считать, что магнитный поток двигателя не зависит от нагрузки Ф = ФВ = const.
Электродвигатели постоянного тока и области их применения | Полезные статьи
Электродвигатель постоянного тока (ДПТ) представляют собой механизм, преобразующий поступающую на него электрическую энергию в механическое вращение. Работа агрегата базируется на явлении электромагнитной индукции — на проводник, помещенный в магнитное поле, действует сила Ампера: F = B*I*L, где L — длина проводника, I — ток, протекающий по проводнику, B — индукция магнитного поля. Данная сила обуславливает возникновение крутящего момента, который может быть использован для неких практических целей.
Электродвигатели постоянного тока обладают следующими преимуществами:
- Практически линейные регулировочные и механические характеристики, благодаря чему обеспечивается удобство эксплуатации.
- Большая величина пускового момента.
- Компактные размеры (особенно сильно выражено у двигателей на постоянных магнитах).
- Возможность использования одного и того же механизма как в режиме двигателя, так и генератора.
- КПД при полной нагрузке, как правило, выше на 1–2 % чем у асинхронных и синхронных машин, а при неполной нагрузке преимущество может возрастать до 15 %.
Основным недостатком данных устройств является высокая цена их изготовления. Также стоит отметить необходимость регулярного обслуживания коллекторно-щеточного узла и определенное ограничение срока эксплуатации, вызванные его износом, однако на современных моделях эти недостатки практически полностью нивелированы.
Стоит отметить, что механическая характеристика, а значит, и все эксплуатационные показатели во многом зависят от схемы подключения обмотки возбуждения. Всего их четыре:

Способы возбуждения: а — независимое, б — параллельное, в — последовательное, г — смешанное.
Области применения ДПТ
Несмотря на то, что подавляющее большинство электрических сетей обеспечивают переменное напряжение, электродвигатели постоянного тока используются весьма и весьма широко. Собственно говоря, все промышленные приводы, где требуется точная регулировка частоты вращения, реализованы именно на базе ДПТ. Кроме того, электрические машины на постоянных магнитах благодаря своей эффективности и большой плотности мощности широко используются в оборонительной отрасли.
Впрочем, не стоит думать, что вы не сталкивались вживую с данными механизмами. Отсутствие жестких ограничений по размерам приводит к тому, что мы зачастую их не замечаем. Например, в автомобилестроении используются только электродвигатели постоянного тока, причем, несмотря на различие в мощности, на всем грузовом транспорте и спецтехнике они запитаны от 24 вольт, в то время как на легковых автомобилях их рабочее напряжение составляет 12 вольт. Получая энергию от аккумуляторной батареи или генератора, они отвечают за позиционирование сидений, управление зеркалами, поднятие и опускание стекол, а также поддержание в салоне заданной температуры.
Впрочем, электродвигатели постоянного тока могут и сами приводить в движение транспортные средства, и это далеко не только игрушечные автомобили-аттракционы с 12-вольтным аккумулятором. Для того чтобы ощутить, насколько мощными могут быть эти устройства, достаточно оказаться вблизи проходящей мимо пригородной электрички, а мягкость и точность регулировки оборотов наглядно демонстрирует плавный разгон троллейбусов.
Данные электродвигатели широко применяются как в электрическом транспорте (метро, троллейбус, трамвай, пригородные электрические железные дороги, электровозы), так и в подъемных устройствах (электрические подъемные краны).
принцип действия. Двигатель постоянного тока: устройство
Первой из всех изобретенных в 19 веке вращающихся электромашин является двигатель постоянного тока. Принцип действия его известен с середины прошлого столетия, и до настоящего времени двигатели постоянного тока (ДПТ) продолжают верно служить человеку, приводя в движение множество полезных машин и механизмов.
Первые ДПТ
Начиная с 30-х годов 19 века в своем развитии они прошли несколько этапов. Дело в том, что до появления в конце позапрошлого века машинных генераторов переменного тока единственным источником электроэнергии был гальванический элемент. Поэтому все первые электродвигатели могли работать только на постоянном токе.
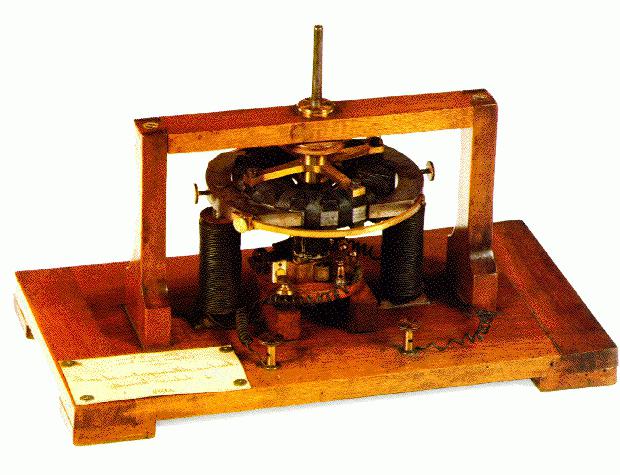
Каким же был первый двигатель постоянного тока? Принцип действия и устройство двигателей, строившихся в первой половине 19 века, являлся следующим. Явнополюсный индуктор представлял собой набор неподвижных постоянных магнитов или стержневых электромагнитов, не имевших общего замкнутого магнитопровода. Явнополюсный якорь образовывали несколько отдельных стержневых электромагнитов на общей оси, приводимых во вращение силами отталкивания и притяжения к полюсам индуктора. Типичными их представителями являлись двигатели У. Риччи (1833) и Б. Якоби (1834), оснащенные механическими коммутаторами тока в электромагнитах якорях с подвижными контактами в цепи обмотки якоря.

Как работал двигатель Якоби
Каков же был у этой машины принцип действия? Двигатель постоянного тока Якоби и его аналоги обладали пульсирующим электромагнитным моментом. В течение времени сближения разноименных полюсов якоря и индуктора под действием магнитной силы притяжения момент двигателя быстро достигал максимума. Затем, при расположении полюсов якоря напротив полюсов индуктора, механический коммутатор прерывал ток в электромагнитах якоря. Момент падал до нуля. За счет инерции якоря и приводимого в движение механизма полюсы якоря выходили из-под полюсов индуктора, в этот момент в них от коммутатора подавался ток противоположного направления, их полярность также менялась на противоположную, а сила притяжения к ближайшему полюсу индуктора сменялась на силу отталкивания. Таким образом, двигатель Якоби вращался последовательными толчками.
Появляется кольцевой якорь
В стержневых электромагнитах якоря двигателя Якоби ток периодически выключался, создаваемое ими магнитное поле исчезало, а его энергия преобразовывалась в тепловые потери в обмотках. Таким образом, электромеханическое преобразование электроэнергии источника тока якоря (гальванического элемента) в механическую происходило в нем с перерывами. Нужен был двигатель с непрерывной замкнутой обмоткой, ток в которой протекал бы постоянно в течение всего времени его работы.
И такой fuhtufn был создан в 1860 году А. Пачинотти. Чем же отличался от предшественников его двигатель постоянного тока? Принцип действия и устройство двигателя Пачинотти следующие. В качестве якоря он использовал стальное кольцо со спицами, закрепленное на вертикальном валу. При этом якорь не имел явно выраженных полюсов. Он стал неявнополюсным.
Между спицами кольца были намотаны катушки обмотки якоря, концы которых соединялись последовательно на самом якоре, а от точек соединения каждых двух катушек были сделаны отпайки, присоединенные к пластинам коллектора, расположенным вдоль окружности внизу вала двигателя, число которых равнялось числу катушек. Вся обмотка якоря была замкнута сама на себя, а последовательные точки соединения ее катушек присоединялись к соседним пластинам коллектора, по которым скользила пара токоподводящих роликов.
Кольцевой якорь был помещен между полюсами двух неподвижных электромагнитов индуктора-статора, так что силовые линии создаваемого ими магнитного поля возбуждения входили в наружную цилиндрическую поверхность якоря двигателя под северным полюсом возбуждения, проходили по кольцевому якорю, не перемещаясь во внутреннее его отверстие, и выходили наружу под южным полюсом.
Как работал двигатель Пачинотти
Какой же у него был принцип действия? Двигатель постоянного тока Пачинотти работал точно так же, как и современные ДПТ.
В магнитном поле полюса индуктора с данной полярностью всегда находилось определенное число проводников обмотки якоря с током неизменного направления, причем направление тока якоря под разными полюсами индуктора было противоположным. Это достигалось размещением токоподводящих роликов, играющих роль щеток, в пространстве между полюсами индуктора. Поэтому мгновенный ток якоря втекал в обмотку через ролик, пластину коллектора и присоединенную к ней отпайку, которая также находилась в пространстве между полюсами, далее протекал в противоположных направлениях по двум полуобмоткам-ветвям, и наконец вытекал через отпайку, пластину коллектора и ролик в другом межполюсном промежутке. При этом сами катушки якоря под полюсами индуктора менялись, но направление тока в них оставалось неизменным.
По закону Ампера, на каждый проводник катушки якоря с током, находящийся в магнитном поле полюса индуктора, действовала сила, направление которой определяется по известному правилу «левой руки». Относительно оси двигателя эта сила создавала вращающий момент, а сумма моментов от всех таких сил дает суммарный момент ДПТ, который уже при нескольких пластинах коллектора является почти постоянным.
ДПТ с кольцевым якорем и граммовской обмоткой
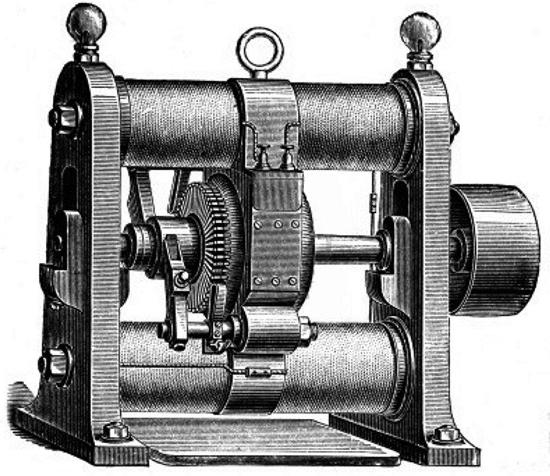
Как это часто случалось в истории науки и техники, изобретение А. Пачинотти не нашло применения. Оно было на 10 лет забыто, пока в 1870 году его независимо не повторил франко-немецкий изобретатель З. Грамм в аналогичной конструкции генератора постоянного тока. В этих машинах ось вращения уже была горизонтальной, использовались угольные щетки, скользящие по пластинам коллектора почти современной конструкции. К 70-м годам 19 века принцип обратимости электромашин стал уже хорошо известен, а машина Грамма использовалась как генератор и двигатель постоянного тока. Принцип действия его уже описан выше.
Несмотря на то, что изобретение кольцевого якоря было важным шагом в развитии ДПТ, его обмотка (названная граммовской) имела существенный недостаток. В магнитном поле полюсов индуктора находились только те ее проводники (называемые активными), которые лежали под этими полюсами на наружной цилиндрической поверхности якоря. Именно к ним были приложены магнитные силы Ампера, создающие вращающий момент относительно оси двигателя. Те же неактивные проводники, что проходили через отверстие кольцевого якоря, не участвовали в создании момента. Они только бесполезно рассеивали электроэнергию в виде тепловых потерь.
От кольцевого якоря к барабанному
Устранить этот недостаток кольцевого якоря удалось в 1873 году известному немецкому электротехнику Ф. Гефнер-Альтенеку. Как же функционировал его двигатель постоянного тока? Принцип действия, устройство его индуктора-статора такие же, как у двигателя с кольцевой обмоткой. А вот конструкция якоря и его обмотка изменились.
Гефнер-Альтенек обратил внимание, что направление тока якоря, вытекающего из неподвижных щеток, в проводниках граммовской обмотки под соседними полюсами возбуждения всегда противоположно, т.е. их можно включить в состав витков расположенной на наружной цилиндрической поверхности катушки с шириной (шагом), равным полюсному делению (части окружности якоря, приходящейся на один полюс возбуждения).
В этом случае становится ненужным отверстие в кольцевом якоря, и он превращается в сплошной цилиндр (барабан). Такая обмотка и сам якорь получили наименование барабанных. Расход меди в ней при одинаковом числе активных проводников гораздо меньше, чем в граммовской обмотке.
Якорь становится зубчатым
В машинах Грамма и Гефнер-Альтенека поверхность якоря была гладкой, а проводники его обмотки располагались в зазоре между ним и полюсами индуктора. При этом расстояние между вогнутой цилиндрической поверхностью полюса возбуждения и выпуклой поверхностью якоря достигало нескольких миллиметров. Поэтому для создания нужной величины магнитного поля требовалось применять катушки возбуждения с большой магнитодвижущей силой (с большим числом витков). Это существенно увеличивало габариты и вес двигателей. Кроме того, на гладкой поверхности якоря его катушки было трудно крепить. Но как же быть? Ведь для действия на проводник с током силы Ампера он должен находиться в точках пространства с большой величиной магнитного поля (с большой магнитной индукцией).
Оказалось, что это не является необходимым. Американский изобретатель пулемета Х. Максим показал, что если выполнить барабанный якорь зубчатым, а в образовавшиеся между зубцами пазы поместить катушки барабанной обмотки, то зазор между ним и полюсами возбуждения можно уменьшить до долей миллиметра. Это позволило существенно уменьшить размеры катушек возбуждения, но вращающий момент ДПТ нисколько не уменьшился.
Как же функционирует такой двигатель постоянного тока? Принцип действия основан на том обстоятельстве, что при зубчатом якоре магнитная сила приложена не к проводникам в его пазах (магнитное поле в них практически отсутствует), а к самим зубцам. При этом наличие тока в проводнике в пазу имеет решающее значение для возникновения этой силы.
Как избавились от вихревых токов
Еще одно важнейшее усовершенствование внес знаменитый изобретатель Т. Эдиссон. Что же добавил он в двигатель постоянного тока? Принцип действия остался неизменным, а вот материал, из которого сделан его якорь, изменился. Вместо прежнего массивного он стал шихтованным из тонких электрически изолированных друг от друга стальных листов. Это позволило уменьшить величину вихревых токов (токов Фуко) в якоре, что увеличило КПД двигателя.
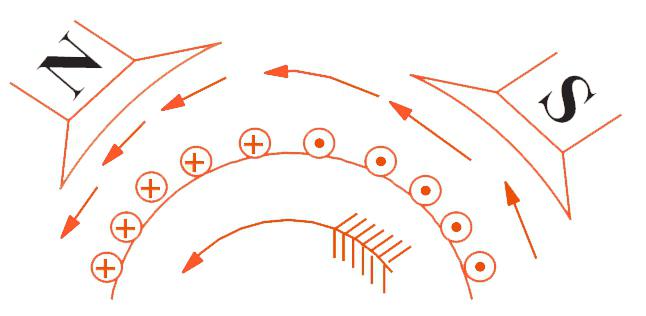
Принцип действия двигателя постоянного тока
Кратко его можно сформулировать так: при подключении обмотки якоря возбужденного двигателя к источнику питания в ней возникает большой ток, называемый пусковым и превышающий в несколько раз его номинальное значение. Причем под полюсами возбуждения противоположной полярности направление токов в проводниках обмотки якоря так же противоположно, как показано на рисунке ниже. Согласно правилу «левой руки», на эти проводники действуют силы Ампера, направленные против часовой стрелки и увлекающие якорь во вращение. При этом в проводниках обмотки якоря наводится электродвижущая сила (противо-ЭДС), направленная встречно напряжению источника питания. По мере разгона якоря растет и противо-ЭДС в его обмотке. Соответственно, ток якоря уменьшается от пускового до величины, соответствующей рабочей точке на характеристике двигателя.
Чтобы повысить скорость вращения якоря, нужно либо увеличить ток в его обмотке, либо снизить противо-ЭДС в ней. Последнего можно добиться, уменьшив величину магнитного поля возбуждения путем снижения тока в обмотке возбуждения. Данный способ управления скоростью ДПТ получил широкое распространение.
Принцип действия двигателя постоянного тока с независимым возбуждением
С присоединением выводов обмотки возбуждения (ОВ) к отдельному источнику электропитания (независимая ОВ) обычно выполняются мощные ДПТ, чтобы было более удобно регулировать величину тока возбуждения (с целью изменения скорости вращения). По своим свойствам ДПТ с независимой ОВ практически аналогичны ДПТ с ОВ, параллельно подключаемой к обмотке якоря.
Параллельное возбуждение ДПТ
Принцип действия двигателя постоянного тока параллельного возбуждения определяется его механической характеристикой, т.е. зависимостью скорости вращения от нагрузочного момента на его валу. Для такого двигателя изменение скорости при переходе от холостого вращения к номинальному моменту нагрузки составляет от 2 до 10%. Такие механические характеристики называются жесткими.

Таким образом, принцип действия двигателя постоянного тока с параллельным возбуждением обуславливает его применение в приводах с постоянной скоростью вращения при большом диапазоне изменения нагрузки. Однако он широко используется и в регулируемом электроприводе с переменной скоростью вращения. При этом для регулирования его скорости может применяться изменение как тока якоря, так и тока возбуждения.
Последовательное возбуждение ДПТ
Принцип действия двигателя постоянного тока последовательного возбуждения, как и параллельного, определяется его механической характеристикой, которая в этом случае является мягкой, т.к. частота вращения двигателя значительно варьируется при изменениях нагрузки. Где же выгоднее всего применять такой двигатель постоянного тока? Принцип действия жд тягового двигателя, скорость которого должна уменьшаться при преодолении составом подъемов и возвращаться к номинальной при движении по равнине, полностью соответствует характеристикам ДПТ с ОВ, последовательно соединенной с обмоткой якоря. Поэтому значительная часть электровозов во всем мире оснащена такими устройствами.
Принцип действия двигателя постоянного тока с последовательным возбуждением реализуют также тяговые двигатели пульсирующего тока, которые представляют собой, по сути, те же ДПТ с последовательной ОВ, но специально сконструированные для работы с выпрямленным уже на борту электровоза током, имеющим значительные пульсации.
Электродвигатель постоянного тока
Постоянная момента
 ,
,
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
 ,
,
- где
 — электродвижущая сила, В,
— электродвижущая сила, В, - – постоянная ЭДС, В∙с/рад,
- — угловая частота, рад/с
 — электродвижущая сила, В,
— электродвижущая сила, В, – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, — угловая частота, рад/с
— угловая частота, рад/сПостоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
 ,
,
- где — постоянная электродвигателя, Нм/√Вт,
- R — сопротивление обмоток, Ом,
- – максимальный момент, Нм,
- — мощность потребляемая при максимальном моменте, Вт
 — постоянная электродвигателя, Нм/√Вт,
— постоянная электродвигателя, Нм/√Вт, – максимальный момент, Нм,
– максимальный момент, Нм, — мощность потребляемая при максимальном моменте, Вт
— мощность потребляемая при максимальном моменте, ВтСправка: Постоянная электродвигателя вместе с размерами электродвигателя являются основными параметрами для инженера при выборе электродвигателя с лучшим соотношением мощность / объем.
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Жесткость механической характеристики двигателя
 ,
,
- где — жесткость механической характеристики электродвигателя постоянного тока
 — жесткость механической характеристики электродвигателя постоянного тока
— жесткость механической характеристики электродвигателя постоянного токаНапряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
 ,
,
- где U — напряжение, В.
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:

Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:

- где I – сила тока, А
- U — напряжение, В,
- M — момент электродвигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — механическая мощность (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где — механическая постоянная времени, с
 — механическая постоянная времени, с
— механическая постоянная времени, с