Что такое динамический диапазон, и какие бывают его разновидности
Односигнальный динамический диапазон по блокированию, Динамический
диапазон по перекрёстным помехам, Динамический диапазон по
интермоду-
ляции.
Другими словами — динамический диапазон определяет способность устройства: с одной стороны видеть на выходе обработанный слабый (наименьший) входной сигнал, с другой — обрабатывать сигналы большого уровня с заданным уровнем искажений на выходе.
Нижнюю границу входного сигнала, как правило, определяет чувствительность устройства (не путать с чувствительностью усилителя, при которой
достигается номинальная мощность),
которая указывает на способность объекта реагировать определённым образом на определённое малое воздействие.
Верхнюю — параметр, называемый точкой децибельной компрессии и равный такой мощности сигнала на входе, при котором отличие изменения уровня мощности на выходе от асимптотической линейной характеристики составляет величину — 1 dB.
А поскольку в последнюю фразу без пол-литра не въедешь, приведу рисунок.
Рис.1
На Рис.1 красным цветом изображена идеальная линейная (асимптотическая) кривая.
Синим — реальная выходная характеристика нашего устройства.
В качестве входных и выходных значений — величины мощностей, соответственно, на входе и выходе.
Пока обе линии располагаются в непосредственной близости друг от друга — всё хорошо, устройство находится в линейном режиме. Как только расхождение выходного параметра от идеальной кривой достигает 1дБ (в нашем случае соответствует уровню входного сигнала -10дБ) — всё расчёт окончен, точка децибельной компрессии найдена.
Формула, описывающая односигнальный динамический диапазон устройства, предельно проста:
D = P1дб — Pвх мин (дб),
где P1дб — точка децибельной компрессии, Pвх мин — чувствительность устройства, выраженная в дБ.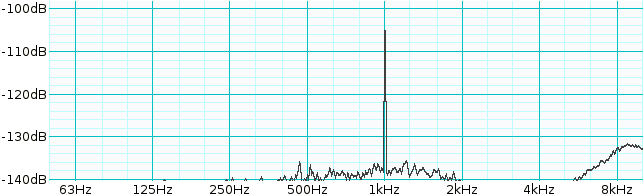
Т.е. в случае, приведённом на графике: D = -10дб — (-120дб) = 110дБ .
Наблюдая показания приборов при нахождении точки компрессии, не всегда удобно оперировать понятиями мощности сигнала, да переводить всё это хозяйство в децибелы — тоже. Поэтому для упрощения задачи напишу — отклонение уровня на 1дБ — это в 1,12 раз по напряжению и в 1,26 раз по мощности.
Ну и, конечно же, формула для определения динамического диапазона при подстановке абсолютных значений сигналов:
И ещё раз:
Uвх макс и Рвх макс — это входные значения, соответствующие точке децибельной компрессии,
Uвх мин и Рвх мин — это напряжение, либо мощность, соответствующие чувствительности агрегата.
А чувствительность агрегата в нашем случае огранена: либо его коэффициентом усиления, либо собственными
внутренними шумами, либо и тем и другим одновременно. В целом она равна мощности самого слабого входного сигнала, который,
будучи преобразован нашим устройством, выдаёт на-гора выходной уровень, считающийся достаточным для его нормальной фиксации.
В целом она равна мощности самого слабого входного сигнала, который,
будучи преобразован нашим устройством, выдаёт на-гора выходной уровень, считающийся достаточным для его нормальной фиксации.
Насколько выше? Обычно это указывается вместе с показателем чувствительности.
К примеру, чувствительность 10мкВ при соотношении сигнал/шум = 12дБ, означает, что подав на вход сигнал амплитудой 10мкВ, мы на выходе увидим некий отклик, который на 12дБ (т.е. в 3,98 раз по напряжению и 15,85 раз по мощности) будет превышать уровень собственных внутренних шумов нашего устройства.
Описанная динамическая характеристика устройства в первую очередь характеризует его односигнальный динамический диапазон, который
определяется методом подачи на вход изучаемого объекта сигнала одной частоты.
Теперь давайте подумаем, что случится, если вдруг подать на вход нашего линейного устройства сигналы двух различных частот.
А что случится?
При определённом уровне их амплитуд наше устройство выйдет из линейного режима и сигналы начнут взаимодействовать между собой таким
образом, что на выходе вместо двух исходных частот появится сложный сигнал с комбинациями частот (гармоник), зависящих от частоты
«родительских» сигналов f1 и f2 согласно следующей формуле:
В высокочастотной электронике это свойство может быть использовано для преобразования частот в устройствах, называемых «смеситель».
Однако в линейных схемах — это явление крайне нежелательно, потому как является основной причиной возникновения интермодуляционных
искажений.
Эти искажения, в свою очередь, приводят: к появлению побочных каналов приёма/передачи в ВЧ радиотехнике,
а в усилителях НЧ — появлению посторонних призвуков. Причём, данный тип искажений гораздо неприятнее на слух, чем банальное
амплитудное ограничение сигнала. Источник их появления гораздо сложнее обнаружить, а соответственно и устранить.
Ну вот мы медленно, но верно подобрались к определению понятия «динамический диапазон по интермодуляции
Динамическим диапазоном по интермодуляции (Dynamic Range) называется характеристика устройства, показывающая
его способность противостоять продуктам нелинейного взаимодействия двух или более сигналов. Обозначается — DD3 или DB3.
Другими словами — параметр DB3 характеризует допустимую величину двух сигналов с различными частотами f1 и f2, действующих одновременно на
входе устройства, при которой ещё не возникает продукт их взаимодействия (вернее, когда уровень этого продукта не
превышает заданного параметра — RFrx).
Измерение динамического диапазона по интермодуляции (DB3) — дело не такое простое, как измерение односигнального DB1. Процесс это сводится
к определению суммарной величины, так называемых, продуктов 3-го порядка с частотами 2f1 ± f2, 2f2 ± f1. Приведу формулу для вычисления
динамического диапазона:
DB3 = 2/3 × IP3 — Pвх мин (дб), где IP3 — точка пересечения
линии уровня интермодуляционных составляющих 3-го порядка на графике передаточной характеристики, а Pвх мин — чувствительность,
выраженная в дБ и определяемая собственными шумами устройства.
Рис.2
На Рис.2 красным и синим цветами изображены знакомые нам по Рис.1 динамические характеристики: идеальная и характеристика основных частот
входных сигналов (f1 и f2).
Чёрным цветом показана кривая интермодуляционных продуктов 3-го порядка с частотами 2f1 ± f2 и 2f2 ± f1. Данная кривая возрастает
в 3 раза быстрее (в децибельном выражении) чем идеальная, поэтому теоретически в некоторой точке эти линии должны сойтись, обозначая
точку пересечения по интермодуляции третьего порядка (IP3).
Данная кривая возрастает
в 3 раза быстрее (в децибельном выражении) чем идеальная, поэтому теоретически в некоторой точке эти линии должны сойтись, обозначая
точку пересечения по интермодуляции третьего порядка (IP3).
Будучи теоретической — эта точка никогда не может быть достигнута на практике, поскольку смеситель войдёт в режим компрессии
сигнала раньше, чем эта точка будет достигнута.
Нахождение данной точки (IP3) — задача не такое простая, как измерение односигнального DB1. Поэтому для облегчения жизни радиолюбителя
вводятся некоторые допущения, основанные, исходя из практического опыта. А именно:
В общем случае обычно отмечается, что связь между точкой компрессии 1 дБ и точкой пересечения 3-го порядка, приведённой к входу,
имеет вид:
IP3 = P1дб + (10…15)дб.
А учитывая, что односигнальный динамический диапазон DB1 описывается формулой: 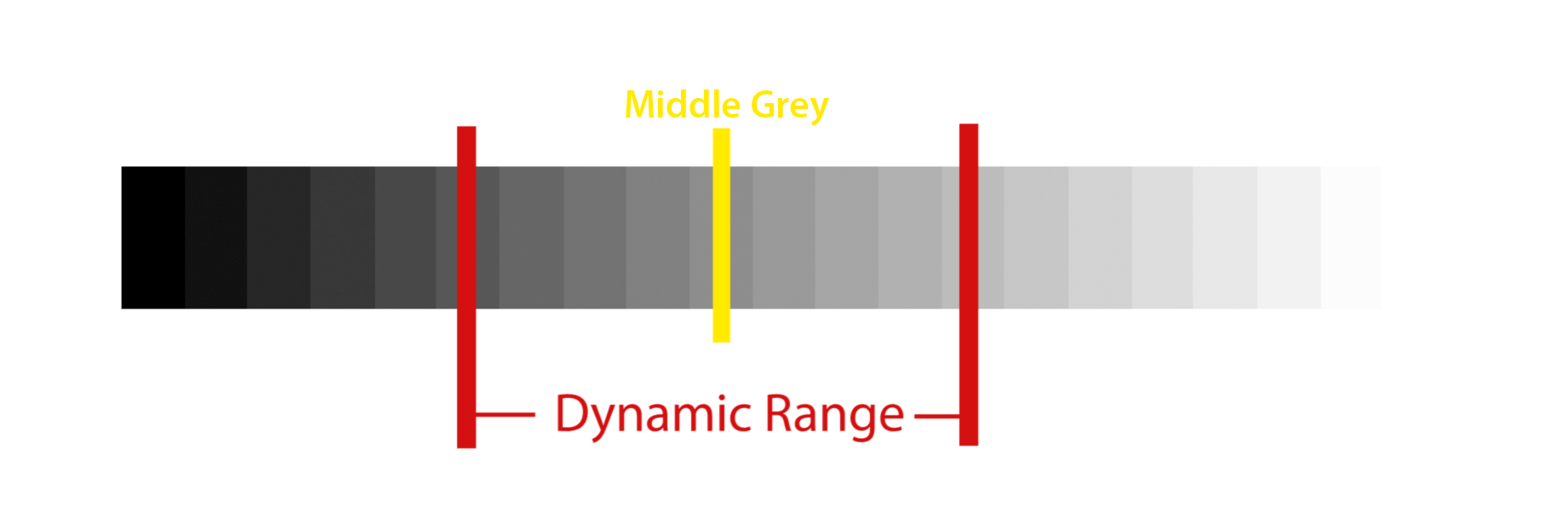 ..15)дб).
..15)дб).
Посчитаем. Если односигнальный динамический диапазон по блокированию DB1 равен 110дБ, то:
DB3 ≈ 2/3 × (110дБ + 10дБ) = 80дБ.
Всё — расчёт окончен! Именно на эту величину динамического диапазона по интермодуляции и следует ориентироваться,
так как именно она в значительной степени определяет качественные показатели как НЧ, так и ВЧ оборудования!
И напоследок — ещё одна динамическая характеристика, достойная определённого внимания по большей части в радиосвязи — Динамический
диапазон по перекрёстным помехам (DD2 или DB2).
Характеристика эта важна в основном для устройств, осуществляющих приём однополосных (SSB) сигналов и определяет степень подавления
мощных станций, работающих с АМ модуляцией и расположенных по соседству.
Перекрёстные искажения возникают в УВЧ и преобразователях частоты приёмников при воздействии на эти элементы модулированного
мешающего сигнала с частотой, близкой к значению частоты настройки основного канала приёма, например, на частоте соседнего канала.
Процесс измерения этого параметра подобен предыдущему описанию и сводится к определению величины продуктов 2-го порядка с частотами (f1 ± f2)
и нахождению точки интермодуляции (IP2) посредством построения такого же графика.
Кривая интермодуляционных продуктов 2-го порядка растёт медленнее, чем 3-го (всего лишь в 2 раза быстрее идеальной передаточной
характеристики), а потому и точка пересечения, обозначающая значение IP2, находится дальше от начала координат.
Благодаря «Справочнику радиолюбителя — коротковолновика» под авторством уважаемых С. Бунина и Л. Яйленко, вполне можно довериться компромиссной формуле: DB2 ≈ DB1 — 20 dB, что в нашем случае будет соответствовать 90дБ.
Основы радиолокации — Основные принципы радиолокации
Динамический диапазон приемника
точка
предельной
чувствительности
точка
начала
насыщения
Рисунок 1. Так называемая кривая калибровки приемника: выходной сигнал приемника (по оси Y) как функция от его входного сигнала (по оси Х).
Разница между абсциссой точки, в которой начинается насыщение приемника, и абсциссой точки,
соответствующей чувствительности приемника, есть динамический диапазон приемника в децибелах
(здесь: 118 — 96 = 22 дБ)
Так называемая кривая калибровки приемника: выходной сигнал приемника (по оси Y) как функция от его входного сигнала (по оси Х).
Разница между абсциссой точки, в которой начинается насыщение приемника, и абсциссой точки,
соответствующей чувствительности приемника, есть динамический диапазон приемника в децибелах
(здесь: 118 — 96 = 22 дБ)
точка
предельной
чувствительности
точка
начала
насыщения
Рисунок 1. Так называемая кривая калибровки приемника: выходной сигнал приемника (по оси Y) как функция от его входного сигнала (по оси Х). Разница между абсциссой точки, в которой начинается насыщение приемника, и абсциссой точки, соответствующей чувствительности приемника, есть динамический диапазон приемника в децибелах (здесь: 118 — 96 = 22 дБ).
Динамический диапазон приемника
Соотношение мощностей эхо-сигналов от близко расположенных объектов и эхо-сигналов от объектов,
находящихся на очень больших расстояних от радиолокатора, может достигать 80 дБ.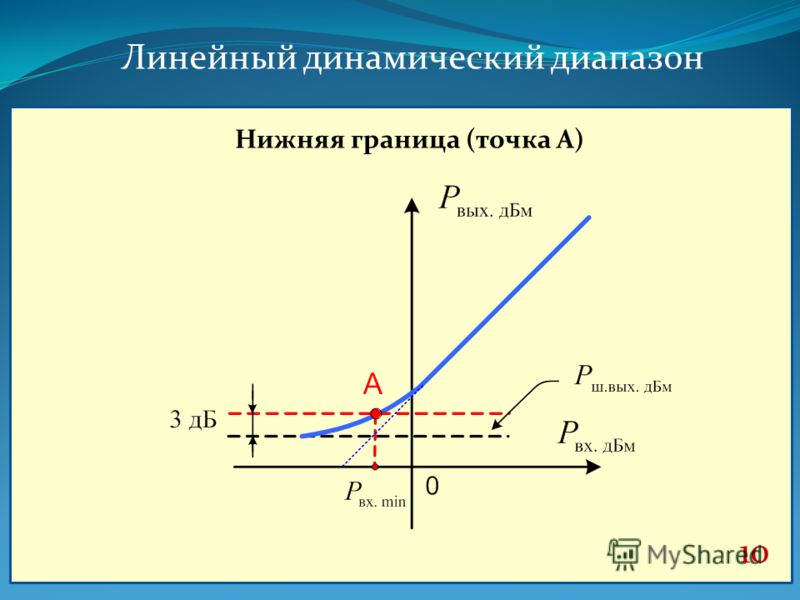 Обработка сигналов с такой большой разницей в мощности сопряжена со значительными трудностями.
Особенно это относится к радиолокаторам, в которых принятые сигналы при обработке преобразовываются в цифровую форму.
Обработка сигналов с такой большой разницей в мощности сопряжена со значительными трудностями.
Особенно это относится к радиолокаторам, в которых принятые сигналы при обработке преобразовываются в цифровую форму.
Соотношение между максимальной и минимальной возможными мощностями сигналов, которые могут обрабатываться без перегрузки приемника, обозначают термином «динамический диапазон». Формула для определения этого параметра имеет вид:
| D = | Prmax | = значение максимальной мощности сигнала, не приводящее к перегрузке приемника. = значение минимальной мощности сигнала, при которой на выходе приемника сигнал все еще наблюдается. | |
| Prmin |
Большинство параметров в
уравнении дальности радиолокации
остаются постоянными в течение периода следования зондирующих сигналов.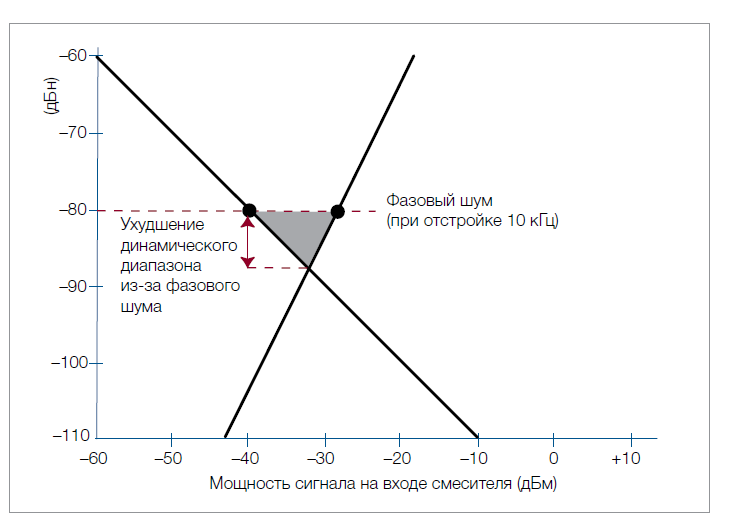 Существенно могут изменяться только два параметра:
эффективная поверхность цели σ
и расстояние до цели.
Следовательно, для оценки динамического диапазона можно использовать такие крайние значения мощности эхо-сигнала:
максимальная мощность — от цели с максимальной эффективной поверхностью и находящейся на минимальной дальности;
минимальная мощность — от цели с минимальной эффективной поверхностью и находящейся на максимальной дальности.
При этом под минимальной дальностью понимается
минимальная дальность действия
радиолокатора.
Существенно могут изменяться только два параметра:
эффективная поверхность цели σ
и расстояние до цели.
Следовательно, для оценки динамического диапазона можно использовать такие крайние значения мощности эхо-сигнала:
максимальная мощность — от цели с максимальной эффективной поверхностью и находящейся на минимальной дальности;
минимальная мощность — от цели с минимальной эффективной поверхностью и находящейся на максимальной дальности.
При этом под минимальной дальностью понимается
минимальная дальность действия
радиолокатора.
| Pr = | Pt λ2 G2 σ | = k · | σ | (2) |
| (4π)3 · R4 | R4 |
Объединим относительно постоянные составляющие в постоянный коэффициент k
и выразим через него значения максимальной и минимальной возможных мощностей принимаемого сигнала.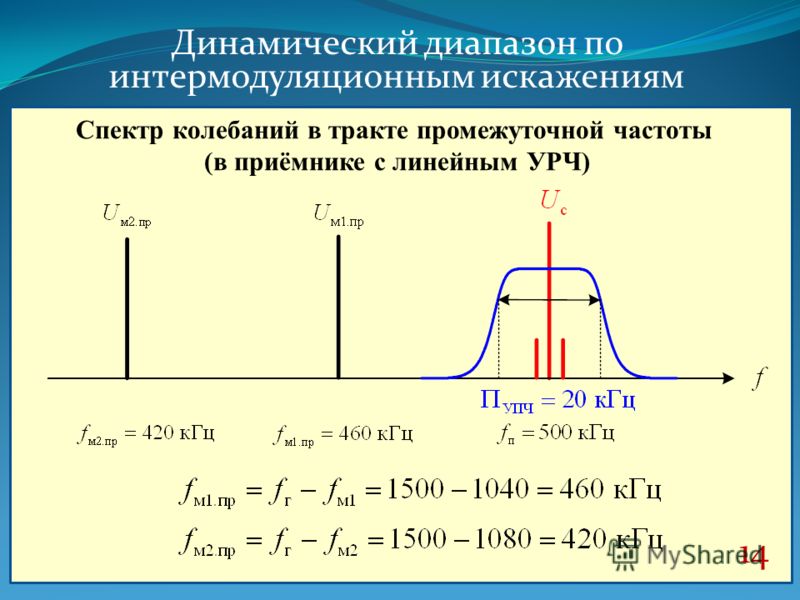 Подставив полученные выражения в формулу для динамического диапазона и сократив одинаковые коэффициенты, получим:
Подставив полученные выражения в формулу для динамического диапазона и сократив одинаковые коэффициенты, получим:
| D = | Prmax | = | k · σmax / R4min | = | σmax · R4max | (3) |
| Prmin | k · σmin / R4max | σmin · R4min |
Используем полученную формулу для оценки требуемого динамического диапазона приемника конкретного радиолокатора с заданными характеристиками.
В качестве примера рассмотрим радиолокатор управления воздушным движением
ASR-E.
Длительность зондирующего сигнала этого радиолокатора составляет 45 мкс
(сигнал с внутриимпульсной модуляцией для зондирования больших дальностей),
что соответствует минимальной дальности действия 6,75 км. Максимальная дальность действия для этого же сигнала определена в 60 морских миль, то есть около 110 км.
Приемник должен обеспечивать прием сигналов от целей с эффективной поверхностью от 0,1 м² (сверхлегкий самолет)
до 100 м² (большой транспортный самолет).
При таких условиях рассчитаем требуемый динамический диапазон приемника:
Максимальная дальность действия для этого же сигнала определена в 60 морских миль, то есть около 110 км.
Приемник должен обеспечивать прием сигналов от целей с эффективной поверхностью от 0,1 м² (сверхлегкий самолет)
до 100 м² (большой транспортный самолет).
При таких условиях рассчитаем требуемый динамический диапазон приемника:
| D = | 100 m² · (110 km)4 | = 7 · 107 ≈ 78,5 dB |
| 0,1 m² · (6,75 km)4 |
Таким образом, требуемый динамический диапазон приемника составляет 78,5 дБ. Это означает, что приемник должен быть способен обрабатывать как наименьшие возможные эхо-сигналы, так и эхо-сигналы, превышающие их по мощности в 70 миллионов раз.
Это не представляется возможным без применения нескольких
специальных схем,
осуществляющих так называемое сжатие динамического диапазона. Сдедует помнить, что возникающее при этом масштабирование амплитуды принимаемых сигналов должно быть учтено при дальнейшей обработке сигналов!
Сдедует помнить, что возникающее при этом масштабирование амплитуды принимаемых сигналов должно быть учтено при дальнейшей обработке сигналов!
Понимание динамического диапазона… Игра в числа
Существует значительная путаница, вызванная отчетами о динамическом диапазоне профилировщиков луча. Цель этого руководства по применению состоит в том, чтобы объяснить некоторые термины, используемые при обсуждении этого параметра как компанией Ophir-Spiricon, так и другими поставщиками профилировщиков луча.
Определение
Динамический диапазон — это отношение наибольшего измеримого сигнала к наименьшему измеримому сигналу. Наименьший измеримый сигнал обычно определяется как сигнал, равный уровню шума, или, альтернативно, как «Эквивалентная шумовая экспозиция» или как точка, в которой отношение сигнал/шум (SNR) равно 1.
Чтобы измерить профиль луча, мы должны иметь SNR не менее 10, чтобы получить минимально полезный результат. Для достижения точности 2% требуется SNR 100:1. Однако в спецификациях приборов Ophir и ее конкуренты используют динамический диапазон оцифровки. Обсуждение ниже будет следовать этому подходу.
Для достижения точности 2% требуется SNR 100:1. Однако в спецификациях приборов Ophir и ее конкуренты используют динамический диапазон оцифровки. Обсуждение ниже будет следовать этому подходу.
Единицы
Динамический диапазон может быть выражен как отношение, например 1000:1, или может быть выражен в децибелах мощности или напряжения.
Следовательно, если соотношение 1000:1 соответствует двум уровням мощности лазера, динамический диапазон дБ будет следующим:
тогда динамический диапазон дБ будет равен:
Пример
Рассмотрим типичную 12-битную ПЗС-камеру, такую как BeamGage SP-620 или 12-битный NanoScan Диапазон оцифровки компьютерного интерфейса составляет от 0 до 212-1 отсчетов или 0-4095 счетов. Выраженное в дБ мощность это 36дБ. Выраженное в дБ вольт , получается гораздо более впечатляющее значение 72 дБ. Урок здесь состоит в том, чтобы убедиться, что вы понимаете единицы измерения при сравнении динамического диапазона системы, выраженного в дБ.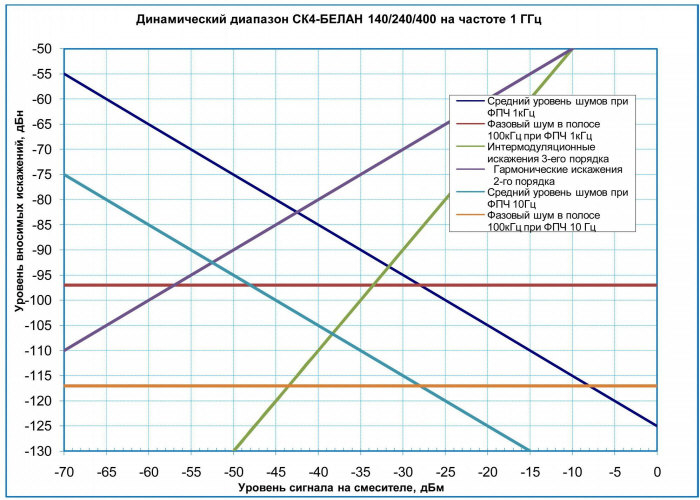
Динамический диапазон оцифровки в зависимости от динамического диапазона измерительного сигнала
Снова рассмотрим 12-битный SP-620. Сама камера представляет собой ПЗС-матрицу с заданным динамическим диапазоном 880:1. На самом деле это меньше, чем диапазон дигитайзера, поэтому, когда мы говорим, что динамический диапазон составляет 64 дБ, мы действительно говорим о дигитайзере. Диапазон массива 880:1 относится к эквивалентной шумовой экспозиции и дает дБ мощность 29,44 дБ.
Мгновенное (однократное измерение) и полный достижимый динамический диапазон
Теперь мы можем разделить динамический диапазон прибора на две части: мгновенные или однократные измерения и полный достижимый диапазон. Возможность мгновенного или одиночного измерения представляет собой динамический диапазон оцифровки за вычетом любых уровней шума. Полный достижимый диапазон включает в себя диапазон оцифровки и любые расширения диапазона, достигаемые с помощью элементов управления усилением и экспозицией, а также внешнего ослабления, например фильтров нейтральной плотности.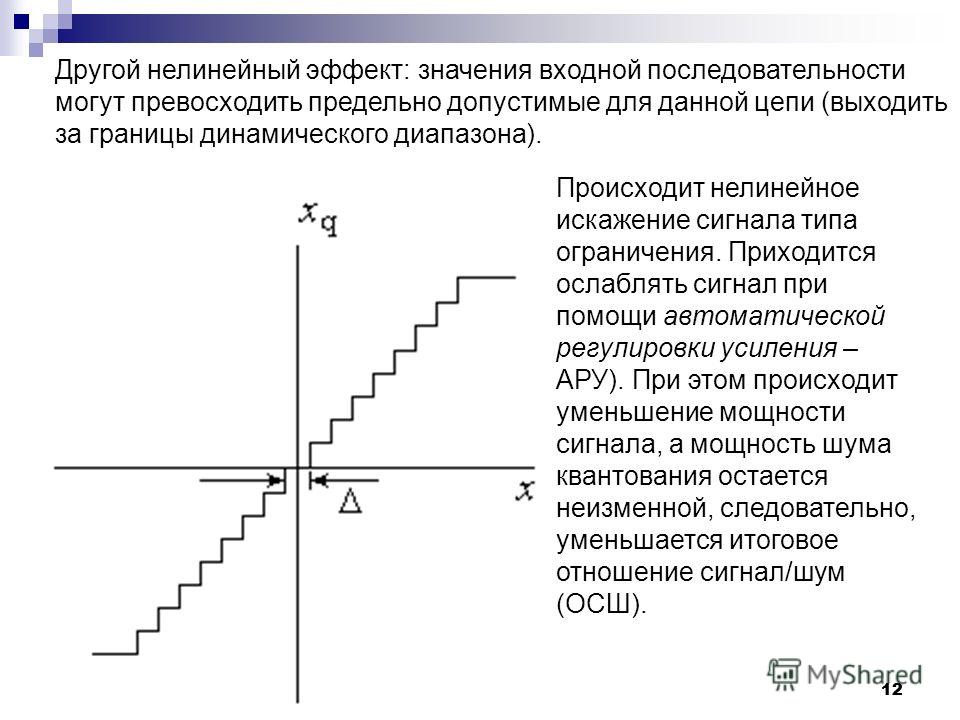
Для вышеупомянутого SP-620 с программным пакетом BeamGage регуляторы экспозиции и усиления добавляют дополнительные 72 дБ вольт , 36 дБ мощность . Это дает общий динамический диапазон на кадр около 65 дБ мощности . Однако, добавив к этому затухание, мы можем расширить динамический диапазон почти до безграничного уровня.
Пример NanoScan
Динамический диапазон оцифровки NanoScan составляет 36 дБ в степени (12 бит). Схемы усилителя обеспечивают автоматический диапазон усиления около 85 дБ вольт i , следовательно, можно утверждать, что общий динамический диапазон измерений составляет 78,5 дБ мощность .(36+(85/2)). Это можно увидеть на диаграммах рабочего пространства различных моделей NanoScan, которые показывают примерно семь (7) порядков.
Заключение
Важно понимать, какие единицы измерения используются при сравнении динамического диапазона различных инструментов. Большинство ПЗС-систем сообщают о динамическом диапазоне в дБ вольт . Наноскан и гониометрические радиометры сообщают о своих динамических диапазонах в дБ сила . Оба варианта действительны, но если вы хотите понять, как динамический диапазон повлияет на ваши измерения лазерного луча, мощность дБ и обеспечит более реалистичное значение отклика датчика на различные уровни мощности лазера.
Большинство ПЗС-систем сообщают о динамическом диапазоне в дБ вольт . Наноскан и гониометрические радиометры сообщают о своих динамических диапазонах в дБ сила . Оба варианта действительны, но если вы хотите понять, как динамический диапазон повлияет на ваши измерения лазерного луча, мощность дБ и обеспечит более реалистичное значение отклика датчика на различные уровни мощности лазера.
i Это немного зависит от типа детектора (например, кремниевый детектор имеет диапазон усиления 103 дБВ, пироэлектрический 85 дБ)
Прочитать статью полностью
Отношение сигнал/шум и определения динамического диапазона
Перейти к содержимомуОпределение отношения сигнал-шум и динамического диапазонаPernille Kennedy2021-10-27T16:41:52+02:00
Определение отношения сигнал-шум и динамического диапазона
Отношение сигнал-шум (SNR) и динамический диапазон (DR) два общих параметра, используемых для определения электрических характеристик спектрометра. В этом техническом примечании будет описано, как они определяются и как их измерять и рассчитывать.
В этом техническом примечании будет описано, как они определяются и как их измерять и рассчитывать.
Рисунок 1: Определения SNR и DR
Сигнал, выходящий из спектрометра, представляет собой цифровой сигнал в диапазоне от 0 до 2ⁿ-1, где n – число битов аналого-цифрового (АЦП) преобразователя в электронике. Типичные числа для n варьируются от 10 до 16, что приводит к максимальному уровню сигнала от 1023 до 65 535 отсчетов.
Шум — это стохастическое отклонение сигнала от среднего значения. На рисунке 1 мы показали спектр с одним пиком по длине волны и времени. Как показано на рисунке, пиковый уровень сигнала будет немного колебаться вокруг среднего значения из-за шума электроники. Шум измеряется среднеквадратичным значением (RMS) колебаний во времени.
SNR определяется как среднее значение пикового сигнала по времени, деленное на среднеквадратичное значение шума пикового сигнала за то же время. Чтобы получить точный результат для SNR, обычно требуется измерить более 25–50 временных отсчетов спектра.
Очень важно, чтобы ваши входные данные для спектрометра были постоянными во время измерений SNR. В противном случае вы будете измерять другие параметры, такие как дрейф мощности лампы или уровни сигнала, зависящие от времени, от вашего образца.
Если вы сохраняете 25–50 измеренных спектров с помощью Excel, вы можете использовать две функции СРЗНАЧ и СТАНДОТКЛОН для расчета ОСШ. Для каждой длины волны (или пикселя) в вашем спектре вы вычисляете среднее значение с помощью функции СРЗНАЧ и среднеквадратичное значение с помощью функции СТАНДОТКЛОН, как показано на рисунке 2.
Динамический диапазон определяется как максимально возможный уровень сигнала, деленный на уровень шума. , когда в спектрометр не попадает свет. Последний по понятным причинам называется темновым шумом спектрометра.
Темновой шум измеряется путем выполнения 25–50 измерений уровня темноты и расчета среднеквадратичного уровня с помощью стандартного отклонения для каждой длины волны (или пикселя).