Операции над векторами, формулы и онлайн калькуляторы
Содержание:
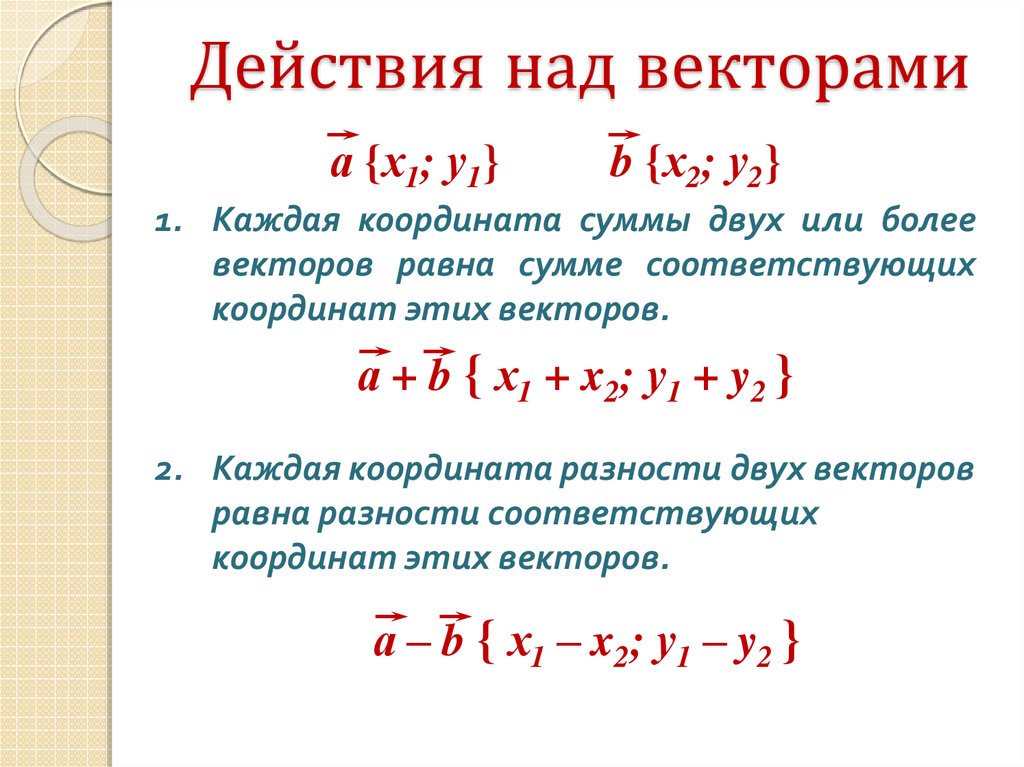
- Сложение и вычитание векторов
- Умножение вектора на число
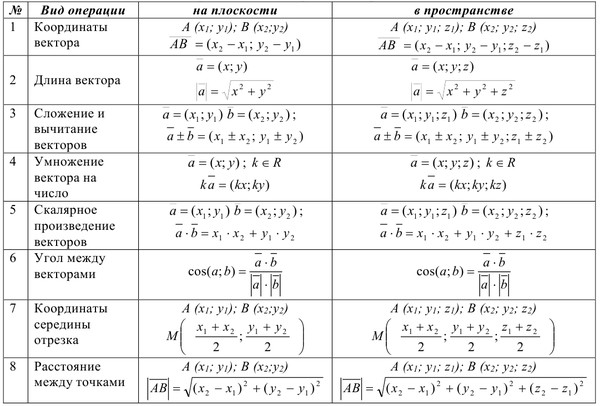
Определение
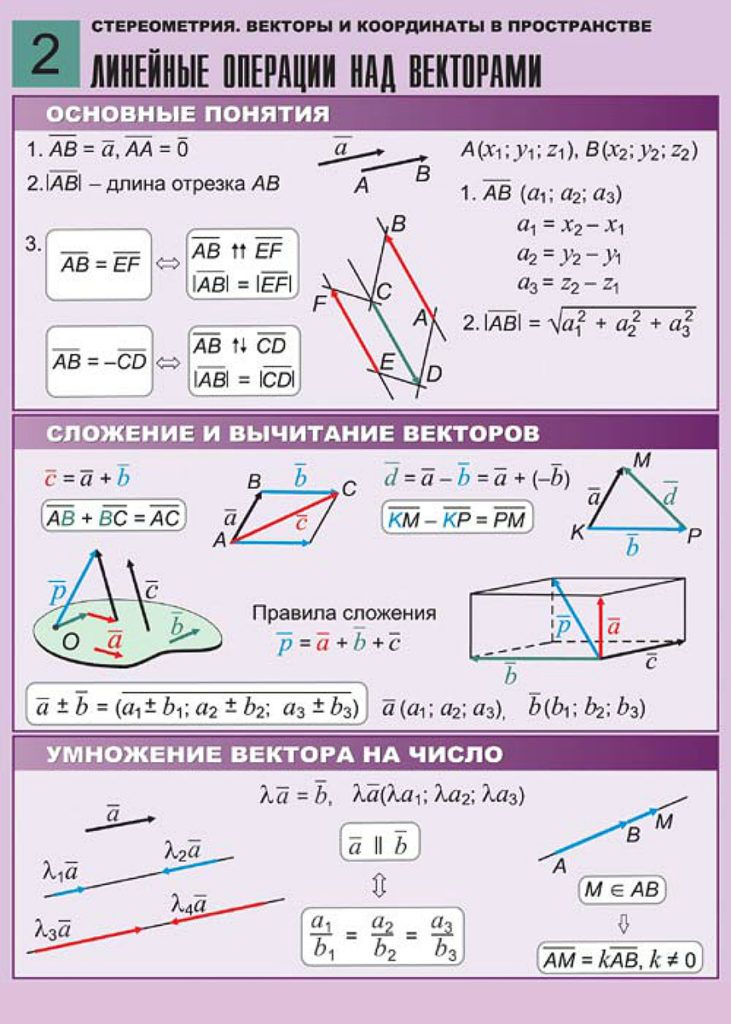
Линейными операциями над векторами называются операции сложения векторов и умножения вектора на число.
Сложение и вычитание векторов
Определение
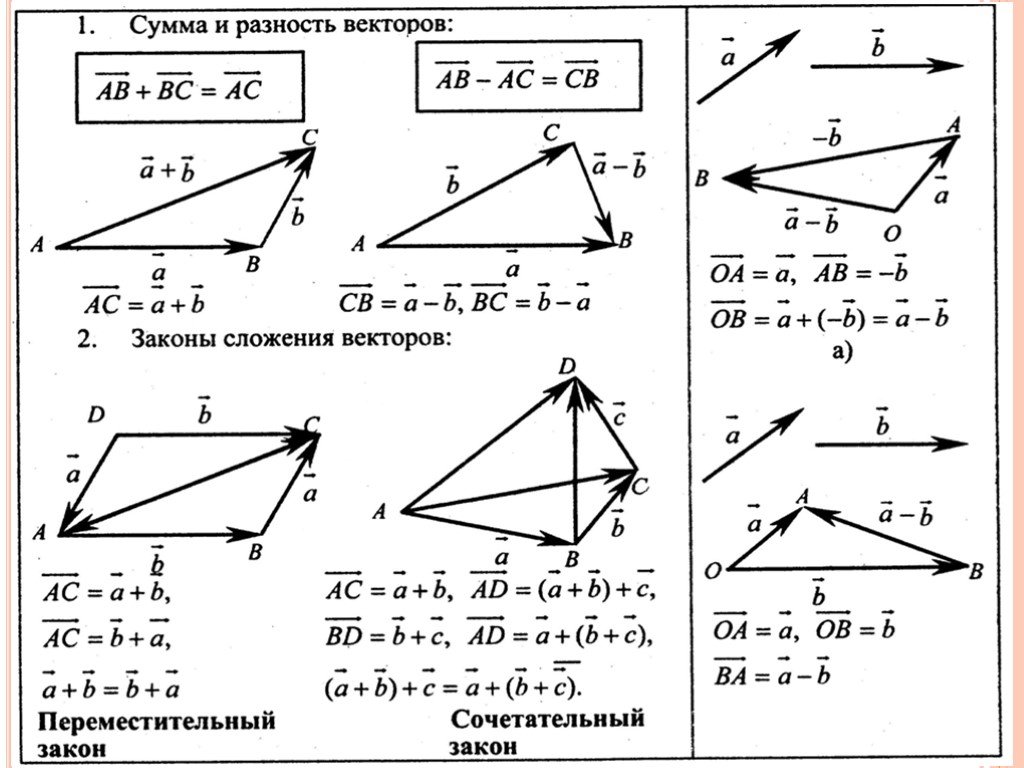
Сложение векторов $\overline{a}$ и $\overline{b}$ осуществляется по правилу треугольника.
Суммой $\overline{a}+\overline{b}$ двух векторов $\overline{a}$ и $\overline{b}$ называют такой третий вектор $\overline{c}$, начало которого совпадает с началом $\overline{a}$, а конец — с концом $\overline{b}$ при условии, что конец вектора $\overline{a}$ и начало вектора $\overline{b}$ совпадают (рис. 1).
Для сложения векторов применяется также правило параллелограмма.
Определение
Правило параллелограмма — если два неколлинеарных вектора $\overline{a}$ и $\overline{b}$ привести к общему началу, то вектор
$\overline{c}=\overline{a}+\overline{b}$ совпадает с диагональю параллелограмма,
построенного на векторах $\overline{a}$ и $\overline{b}$ (рис.
Определение
Вектор $-\overline{a}$ называется противоположным вектором к вектору $\overline{a}$, если он коллинеарен вектору $\overline{a}$, равен ему по длине, но направлен в противоположную сторону вектору $\overline{a}$.
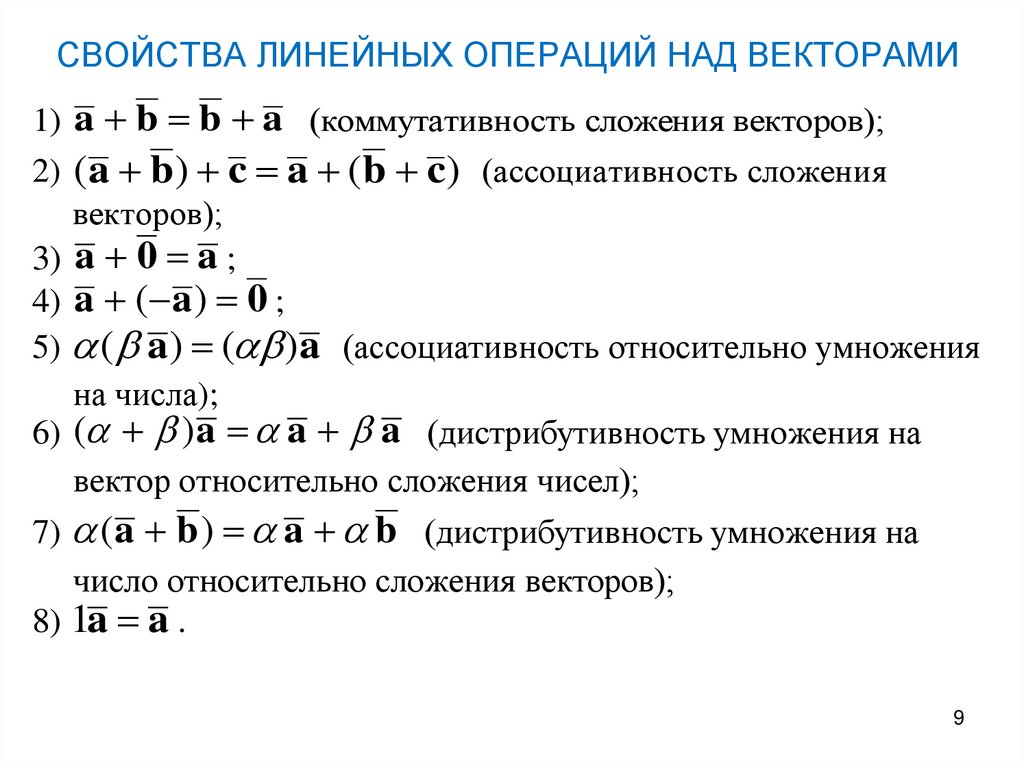
Операция сложения векторов обладает следующими свойствами:
- $\overline{a}+\overline{b}=\overline{b}+\overline{a}$ — коммутативность
- $(\overline{a}+\overline{b})+\overline{c}=\overline{a}+(\overline{b}+\overline{c})$ — ассоциативность
- $\overline{a}+\overline{0}=\overline{a}$
- $\overline{a}+(-\overline{a})=\overline{0}$
Определение
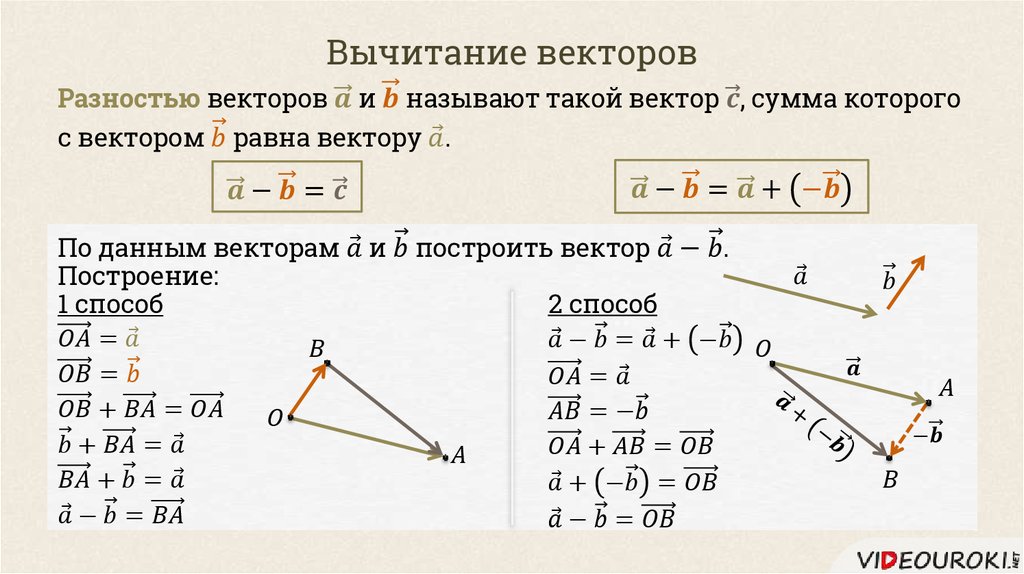
Разностью $\overline{a}-\overline{b}$ векторов $\overline{a}$ и $\overline{b}$ называется вектор $\overline{c}$
такой, что выполняется условие: $\overline{b}+\overline{c}=\overline{a}$ (рис. 3).
3).
Умножение вектора на число
Определение
Произведением $\alpha \overline{a}$ вектора $\overline{a}$
- $\overline{b}\|\overline{a}$
- $|\overline{b}|=|\alpha||\vec{a}|$
- $\overline{a} \uparrow \uparrow \overline{b}$, если $\alpha>0$, $\overline{a} \uparrow \downarrow \overline{b}$, если $\alpha \lt 0$.
Свойства умножения вектора на число:
- $(\alpha \pm \beta) \overline{a}=\alpha \overline{a} \pm \beta \overline{a}$
- $\alpha(\overline{a} \pm \overline{b})=\alpha \overline{a} \pm \alpha \overline{b}$
- $\alpha(\beta \overline{a})=(\alpha \beta) \overline{a}=\beta(\alpha \overline{a})$
- $1 \cdot \overline{a}=\overline{a}$
- $-1 \cdot \overline{a}=-\overline{a}$
- $0 \cdot \overline{a}=\overline{0}$
Здесь $\overline{a}$ и
$\overline{b}$ — произвольные векторы,
$\alpha$,
$\beta$ — произвольные числа.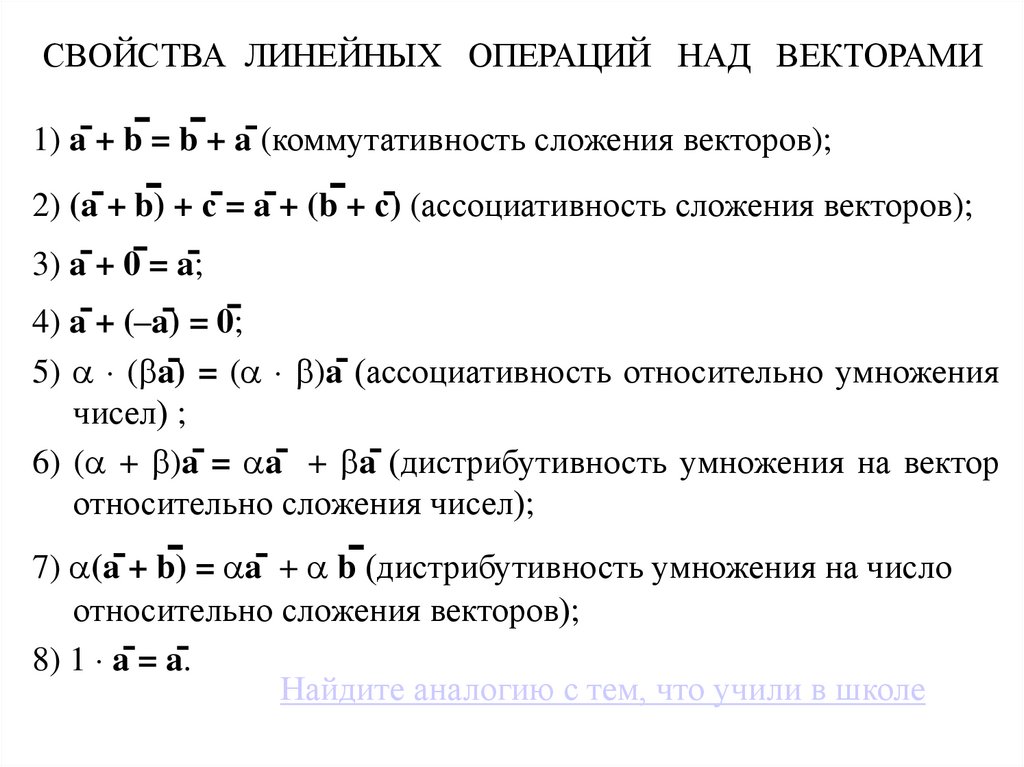
Читать дальше: разложение вектора на составляющие.
236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Краткий курс высшей математики
Краткий курс высшей математики
ОглавлениеПРЕДИСЛОВИЕГЛАВА I.  МЕТОД КООРДИНАТ. ПОНЯТИЕ ФУНКЦИИ МЕТОД КООРДИНАТ. ПОНЯТИЕ ФУНКЦИИ§ 1. ДЕЙСТВИТЕЛЬНЫЕ ЧИСЛА. КООРДИНАТЫ ТОЧКИ НА ПРЯМОЙ 2. Геометрическое изображение действительных чисел. Координаты точки на прямой 3. Абсолютная величина действительного числа 4. Расстояние между двумя точками на прямой § 2. КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ 2. Расстояние между двумя точками на плоскости 3. Деление отрезка в данном отношении 4. Координаты точки в пространстве 5. Расстояние между двумя точками в пространстве § 3. УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ 3. Зависимость между декартовыми и полярными координатами § 4. ФУНКЦИОНАЛЬНАЯ ЗАВИСИМОСТЬ 2. Понятие функции 3. График функции 4. Способы задания функций 5. Основные элементарные функции и их графики 6. Сложные функции. Элементарные функции 7. Целые и дробно-рациональные функции 8. Функции четные и нечетные. Периодические функции § 5. УРАВНЕНИЕ ЛИНИИ 2. Нахождение уравнения линии по ее геометрическим свойствам § 6 ПРЕОБРАЗОВАНИЕ КООРДИНАТ 2. 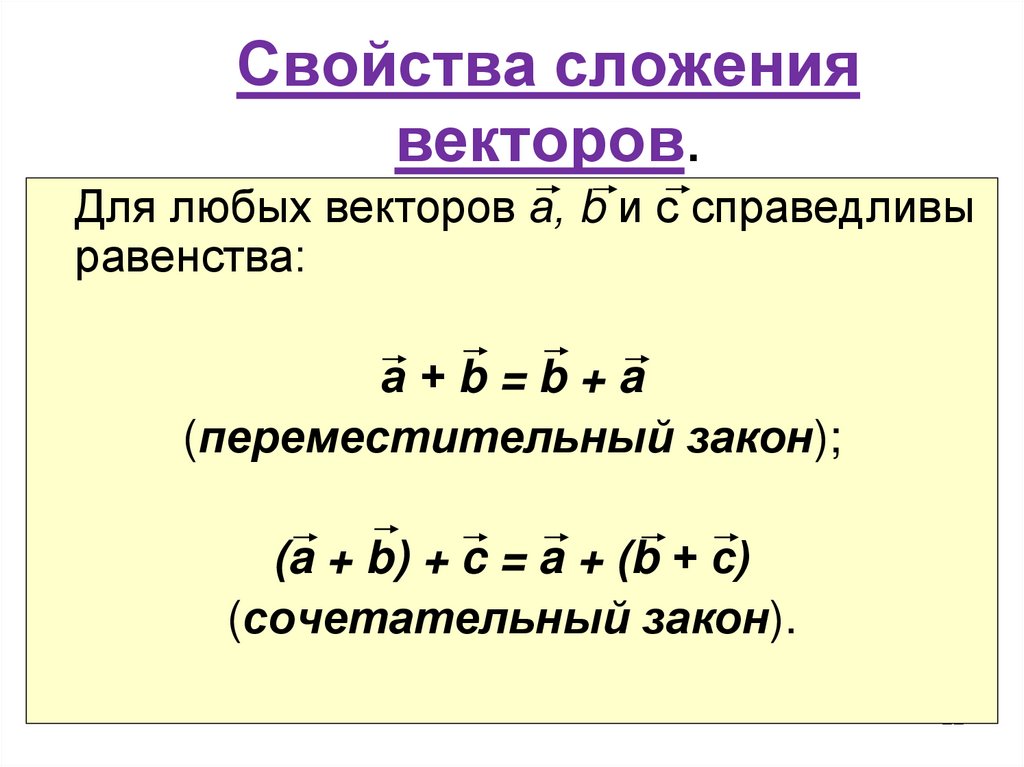 Поворот осей координат Поворот осей координатГЛАВА II. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ 2. Уравнение прямой с угловым коэффициентом 3. Уравнение прямой, параллельной оси ординат 4. Общее уравнение прямой и его частные случаи 5. Точка пересечения прямых. Построение прямой по ее уравнению 6. Вычисление угла между двумя прямыми. Условия параллельности и перпендикулярности двух прямых 7. Уравнение прямой, проходящей через данную точку в заданном направлении 8. Пучок прямых 9. Уравнение прямой, проходящей через две данные точки 10. Расстояние от точки до прямой § 2. КРИВЫЕ ВТОРОГО ПОРЯДКА 2. Окружность 3. Эллипс 4. Гипербола 5. Парабола 6. Окружность, эллипс, гипербола и парабола как конические сечения 8. Уравнение равносторонней гиперболы, асимптоты которой приняты за оси координат 9. График дробно-линейной функции 10. Преобразование уравнения кривой второго порядка, не содержащего члена с произведением координат ГЛАВА III. 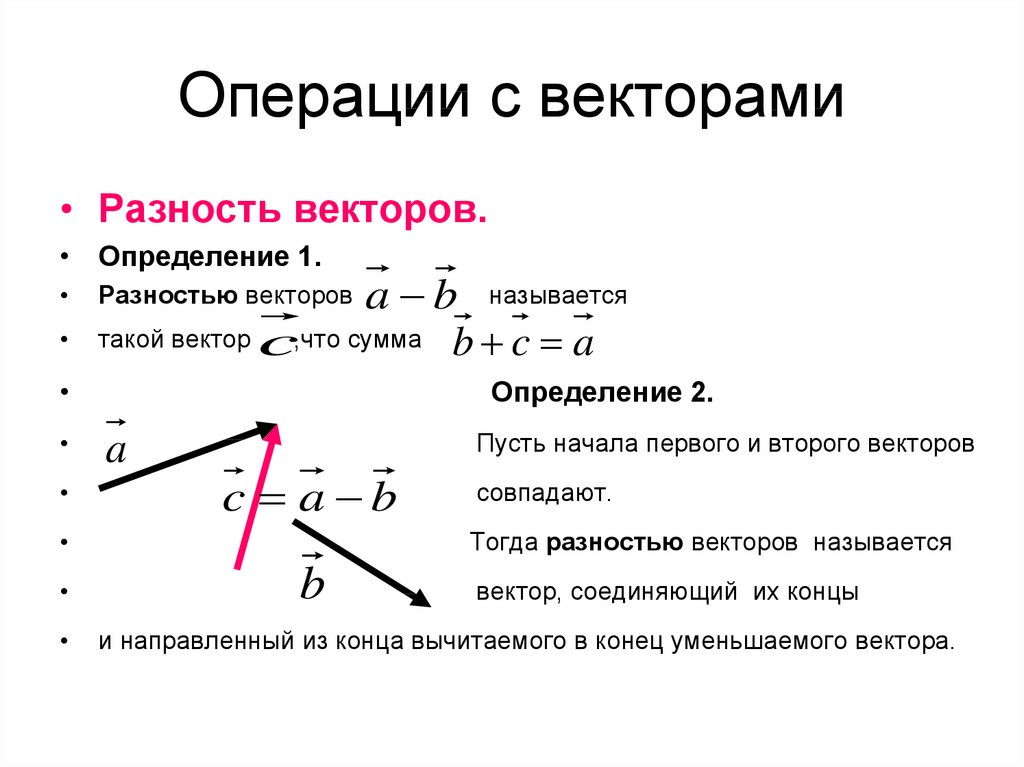 ЭЛЕМЕНТЫ ЛИНЕЙНОЙ И ВЕКТОРНОЙ АЛГЕБРЫ ЭЛЕМЕНТЫ ЛИНЕЙНОЙ И ВЕКТОРНОЙ АЛГЕБРЫ§ 1. ЭЛЕМЕНТЫ ТЕОРИИ ОПРЕДЕЛИТЕЛЕЙ 2. Определитель третьего порядка 3. Понятие об определителях высших порядков § 2. СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ 2. Однородная система двух уравнений первой степени с тремя неизвестными 4. Однородная система трех уравнений первой степени с тремя неизвестными § 3. ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ 2. Линейные операции над векторами 4. Проекция вектора на ось и составляются вектора по оси 5. Разложение вектора на составляющие по осям координат 6. Направляющие косинусы вектора 7. Условие коллинеарности двух векторов 8. Скалярное произведение 9. Выражение скалярного произведения через проекции перемножаемых векторов 10. Косинус угла между двумя векторами 11. Векторное произведение 12. Выражение векторного произведения через проекции перемножаемых векторов 13. Смешанное произведение трех векторов 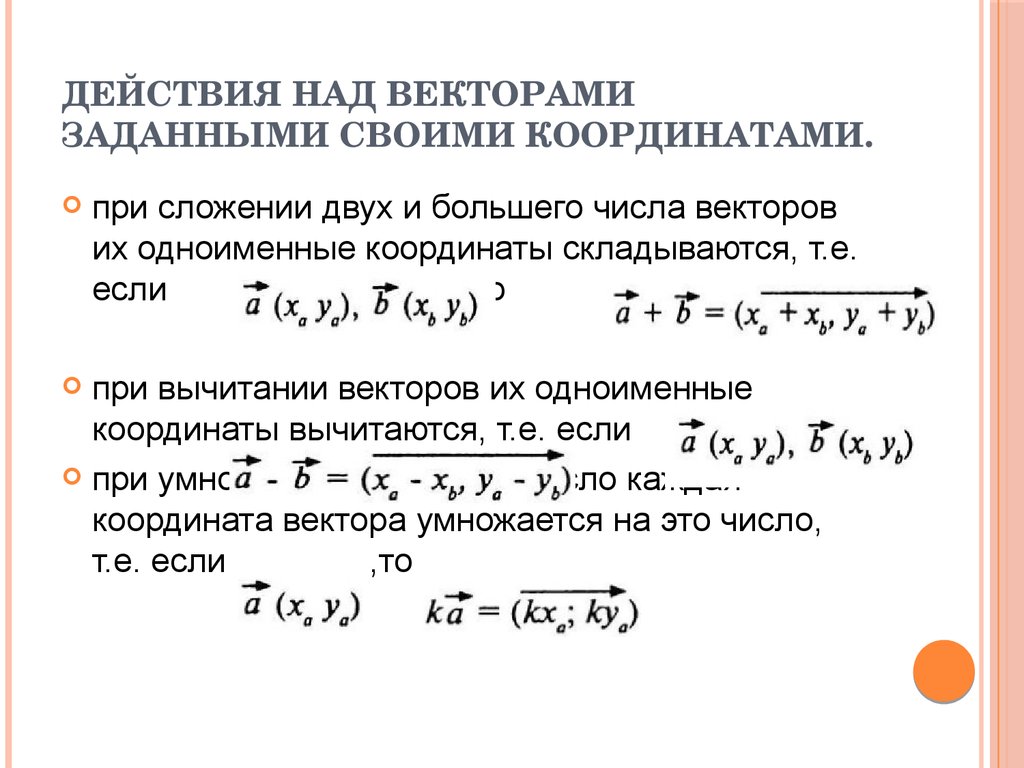 Геометрический смысл смешанного произведения Геометрический смысл смешанного произведения15. Условие компланарности трех векторов § 4. МАТРИЦЫ И ДЕЙСТВИЯ НАД НИМИ 2. Равенство матриц. Действия над матрицами 3. Обратная матрица 4. Матричная запись и матричное решение системы уравнений первой степени § 5. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 2. Преобразование координат 3. Приведение квадратичной формы к каноническому виду 4. Упрощение общего уравнения кривой второго порядка ГЛАВА IV. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ § 1. ПЛОСКОСТЬ 2. Нормальный вектор плоскости. Уравнение плоскости, проходящей через данную точку 4. Построение плоскости по ее уравнению 5. Угол между плоскостями. Условия параллельности и перпендикулярности двух плоскостей 6. Точка пересечения трех плоскостей § 2. ПРЯМАЯ В ПРОСТРАНСТВЕ 2. Общие уравнения прямой 3. Векторное уравнение прямой. Параметрические уравнения прямой 4. Канонические уравнения прямой 5.  Уравнения прямой, проходящей через две точки Уравнения прямой, проходящей через две точки6. Угол между двумя прямыми. Условия параллельности и перпендикулярности прямых § 3. Прямая и плоскость в пространстве 3. Расстояние от точки до плоскости 4. Пучок плоскостей § 4. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 2. Цилиндрические поверхности 3. Конические поверхности 4. Поверхность вращения 6. Гиперболоиды 7. Параболоиды ГЛАВА V. ТЕОРИЯ ПРЕДЕЛОВ § 1. ПРЕДЕЛ ФУНКЦИИ 2. Предел функции при х -> -оо 3. Предел функции при х->х0 4. Бесконечно малые функции. Ограниченные функции 5. Бесконечно большие функции и их связь с бесконечно малыми функциями 6. Основные теоремы о пределах 7. Предел функции при x -> 0 8. Последовательность. Число e 9. Натуральные логарифмы 10. Сравнение бесконечно малых функций § 2. НЕПРЕРЫВНЫЕ ФУНКЦИИ 2. Операции над непрерывными функциями. Непрерывность элементарных функций 3. Свойства функций, непрерывных на сегменте 4. 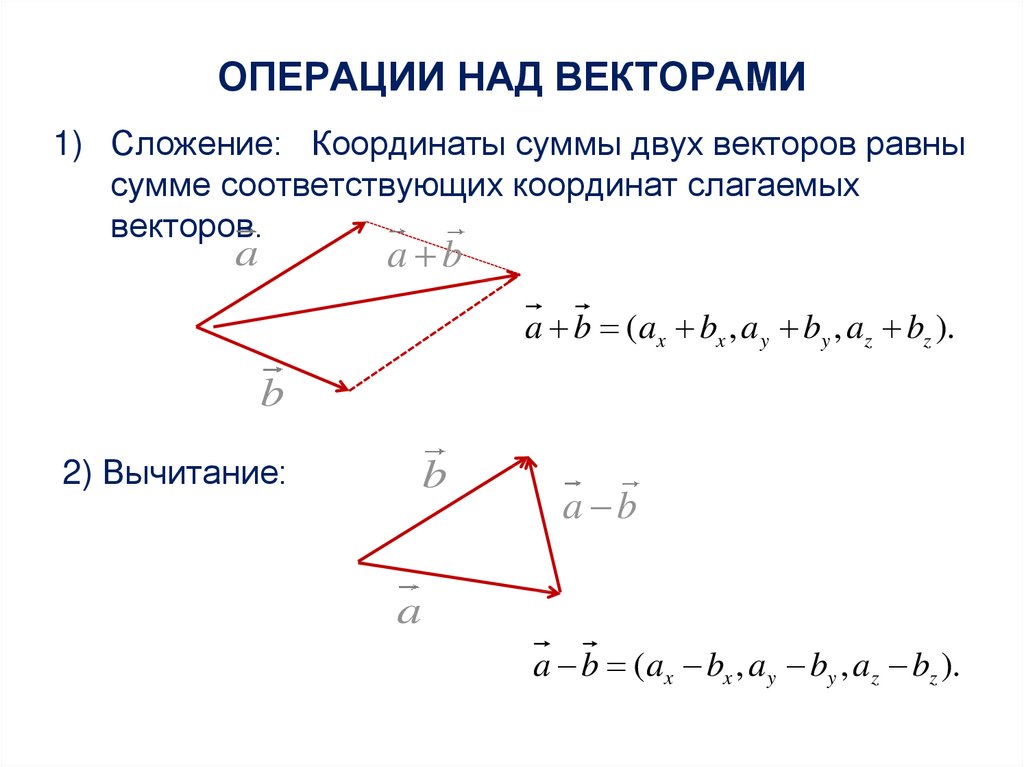 Понятие об обратной функции Понятие об обратной функции5. Обратные тригонометрические функции 6. Показательная и логарифмическая функции 7. Понятие о гиперболических функциях ГЛАВА VI. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ ОДНОЙ ПЕРЕМЕННОЙ 1. Приращение аргумента и приращение функции 2. Определение непрерывности функции с помощью понятии приращения аргумента и приращения функции 3. Задачи, приводящие к понятию производной 4. Определение производной и ее механический смысл 5. Дифференцируемость функции 6. Геометрический смысл производной 7. Производные некоторых основных элементарных функций 8. Основные правила дифференцирования 9. Производная обратной функции 10. Производные обратных тригонометрических функций 11. Производная сложной функции § 12. Производные гиперболических функций 13. Производная степенной функции с любым показателем 14. Сводная таблица формул дифференцирования 15. Неявные функции и их дифференцирование 16. Уравнения касательной а нормали к кривой 17. 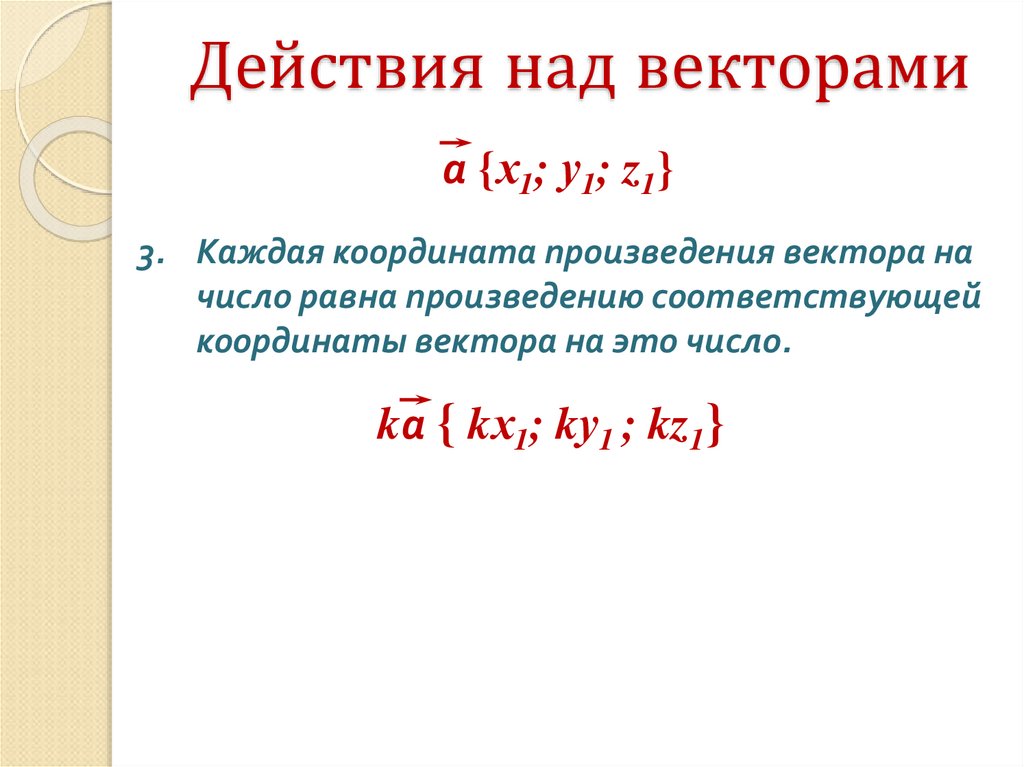 Графическое дифференцирование Графическое дифференцирование§ 2. ПРОИЗВОДНЫЕ ВЫСШИХ ПОРЯДКОВ 1. Нахождение производных высших порядков 2. Механический смысл второй производной § 3. ДИФФЕРЕНЦИАЛ ФУНКЦИИ 2. Производная как отношение дифференциалов 3. Дифференциал суммы, произведения и частного функций 4. Дифференциал сложной функции. Инвариантность формы дифференциала 5. Применение дифференциала к приближенным вычислениям 6. Дифференциалы высших порядков § 4. ФУНКЦИИ, ЗАДАННЫЕ ПАРАМЕТРИЧЕСКИ, И ИХ ДИФФЕРЕНЦИРОВАНИЕ 2. Дифференцирование функций, заданных параметрически § 5. ВЕКТОРНАЯ ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА 2. Векторная функция скалярного аргумента и ее производная 3. Уравнения касательной прямой и нормальной плоскости к пространственной кривой 4. Механический смысл первой и второй производных векторной функции скалярного аргумента § 6. НЕКОТОРЫЕ ТЕОРЕМЫ О ДИФФЕРЕНЦИРУЕМЫХ ФУНКЦИЯХ 2. Теорема Ролля 3. Теорема Лагранжа 4. Правило Лопиталя § 7. 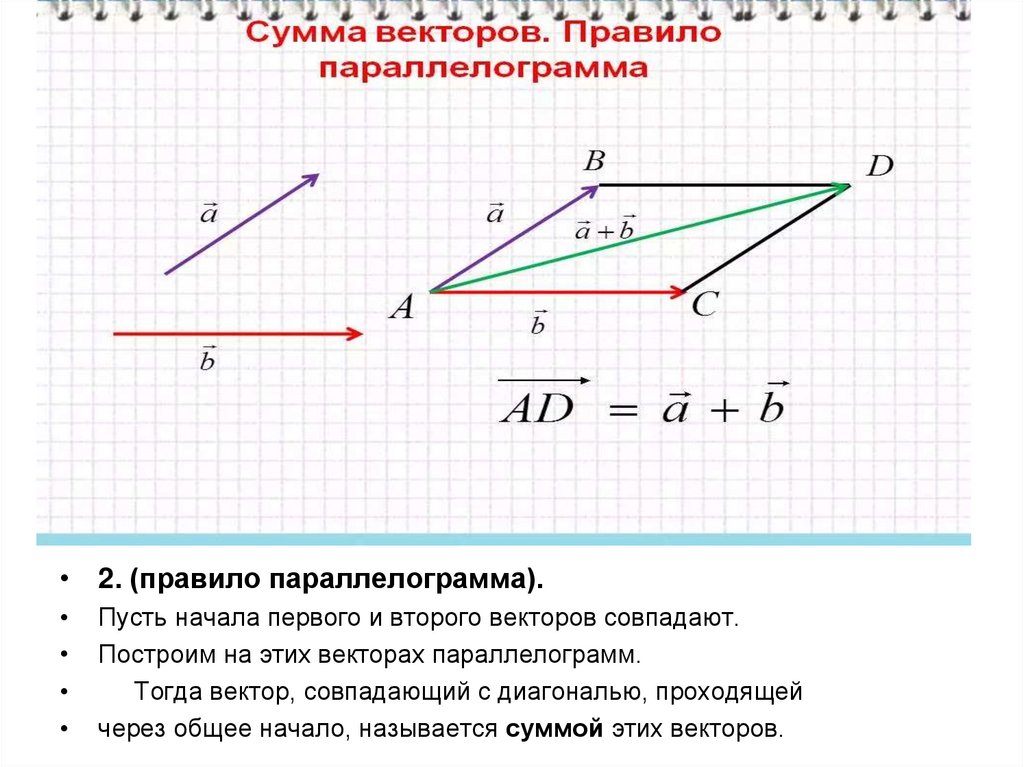 ПРИЛОЖЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ И ПОСТРОЕНИЮ ГРАФИКОВ ПРИЛОЖЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ И ПОСТРОЕНИЮ ГРАФИКОВ2. Максимум и минимум функции 3. Достаточный признак существования экстремума, основанный на знаке второй производной 4. Отыскание наибольшего и наименьшего значений функции 5. Применение теории максимума и минимума к решению задач 6. Выпуклость и вогнутость графика функции. Точки перегиба 7. Асимптоты графика функции 8. Общая схема исследования функции и построение ее графика § 8. ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ 2. Уточнение найденных значений корней методом хорд и касательных § 9. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА ЛАГРАНЖА ГЛАВА VII. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ И ЕГО СВОЙСТВА 2. Геометрический смысл неопределенного интеграла 3. Таблица основных интегралов 4. Основные свойства неопределенного интеграла § 2. ОСНОВНЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ 2. Интегрирование методом замены переменной 3. Интегрирование по частям § 3. ИНТЕГРИРОВАНИЕ РАЦИОНАЛЬНЫХ ФУНКЦИЙ 2.  Рациональные дроби. Выделение правильной рациональной дроби Рациональные дроби. Выделение правильной рациональной дроби3. Интегрирование простейших рациональных дробей 4. Разложение правильной рациональной дроби на простейшие дроби 5. Метод неопределенных коэффициентов 6. Интегрирование рациональных дробей § 4. Интегрирование тригонометрических функций 2. Рациональные функции двух переменных 3. Интегралы вида § 5. ИНТЕГРИРОВАНИЕ НЕКОТОРЫХ ИРРАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Интеграл вида 3. Интегралы видов 4. Интегралы вида § 6. ОБЩИЕ ЗАМЕЧАНИЯ О МЕТОДАХ ИНТЕГРИРОВАНИЯ. ИНТЕГРАЛЫ, НЕ БЕРУЩИЕСЯ В ЭЛЕМЕНТАРНЫХ ФУНКЦИЯХ 2. Понятие об интегралах, не берущихся в элементарных функциях ГЛАВА VIII. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. ЗАДАЧИ, ПРИВОДЯЩИЕ К ОПРЕДЕЛЕННОМУ ИНТЕГРАЛУ 2. Задача о работе переменной силы § 2. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ 2. Свойства определенного интеграла 3. Производная интеграла по переменной верхней границе 4. Формула Ньютона—Лейбница 5. Замена переменной в определенном интеграле 6.  Интегрирование по частям в определенном интеграле Интегрирование по частям в определенном интеграле§ 3. ГЕОМЕТРИЧЕСКИЕ И ФИЗИЧЕСКИЕ ПРИЛОЖЕНИЯ ОПРЕДЕЛЕННОГО ИНТЕГРАЛА 2. Вычисление площади в полярных координатах 3. Вычисление объема тела по известным поперечным сечениям 4. Объем тела вращения 5. Длина дуги кривой 6. Дифференциал дуги 7. Площадь поверхности вращения 8. Общие замечания о решении задач методом интегральных сумм § 4. КРИВИЗНА ПЛОСКОЙ КРИВОЙ 2. Вычисление кривизны 3. Радиус кривизны. Круг кривизны. Центр кривизны 4. Эволюта и эвольвента § 5. НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 2. Интегралы от разрывных функций 3. Признаки сходимости несобственных интегралов § 6. ПРИБЛИЖЕННЫЕ МЕТОДЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ 2. Метод трапеций 3. Метод параболических трапеций (метод Симпсона) ГЛАВА IX. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ § 1. ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. График функции двух переменных 3. Функции трех и большего числа переменных § 2.  Предел функции нескольких переменных. Непрерывность функции. Точки разрыва Предел функции нескольких переменных. Непрерывность функции. Точки разрыва2. Непрерывность функции нескольких переменных 3. Понятие области 4. Точки разрыва 5. Свойства функций, непрерывных в ограниченной замкнутой области § 3. ЧАСТНЫЕ ПРОИЗВОДНЫЕ 2. Геометрический смысл частных производных функции двух переменных 3. Частные производные высших порядков § 4. ПОЛНЫЙ ДИФФЕРЕНЦИАЛ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. Полный дифференциал функции 3. Приложение полного дифференциала к приближенным вычислениям § 5. Дифференцирование сложных и неявных функций 2. Инвариантность формы полного дифференциала 3. Дифференцирование неявных функций § 6. СКАЛЯРНОЕ ПОЛЕ 2. Производная по направлению 3. Градиент 4. Касательная плоскость а нормаль к поверхности 5. Геометрический смысл полного дифференциала функции двух переменных § 7. ЭКСТРЕМУМ ФУНКЦИЙ ДВУХ ПЕРЕМЕННЫХ 2. Наибольшее и наименьшее значения функции двух переменных ГЛАВА X.  КРАТНЫЕ И КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ КРАТНЫЕ И КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ§ 1. ДВОЙНОЙ ИНТЕГРАЛ 2. Двойной интеграл. Теорема существования 3. Свойства двойного интеграла 4. Вычисление двойного интеграла в декартовых координатах 5. Вычисление двойного интеграла в полярных координатах 6. Приложения двойного интеграла § 2. ТРОЙНОЙ ИНТЕГРАЛ 2. Тройной интеграл и его свойства 3. Вычисление тройного интеграла в декартовых координатах 4. Вычисление тройного интеграла в цилиндрических координатах 5. Приложения тройного интеграла § 3. КРИВОЛИНЕЙНЫЙ ИНТЕГРАЛ 2. Задача о работе. Криволинейный интеграл 3. Вычисление криволинейного интеграла 4. Формула Остроградского — Грина 5. Независимость криволинейного интеграла от пути интегрирования 6. Отыскание первообразной по полному дифференциалу 7. Криволинейный интеграл по длине дуги ГЛАВА XI. РЯДЫ § 1. ЧИСЛОВЫЕ РЯДЫ 2. Геометрическая прогрессия 3. Простейшие свойства числовых рядов 4. Необходимый признак сходимости ряда 5. 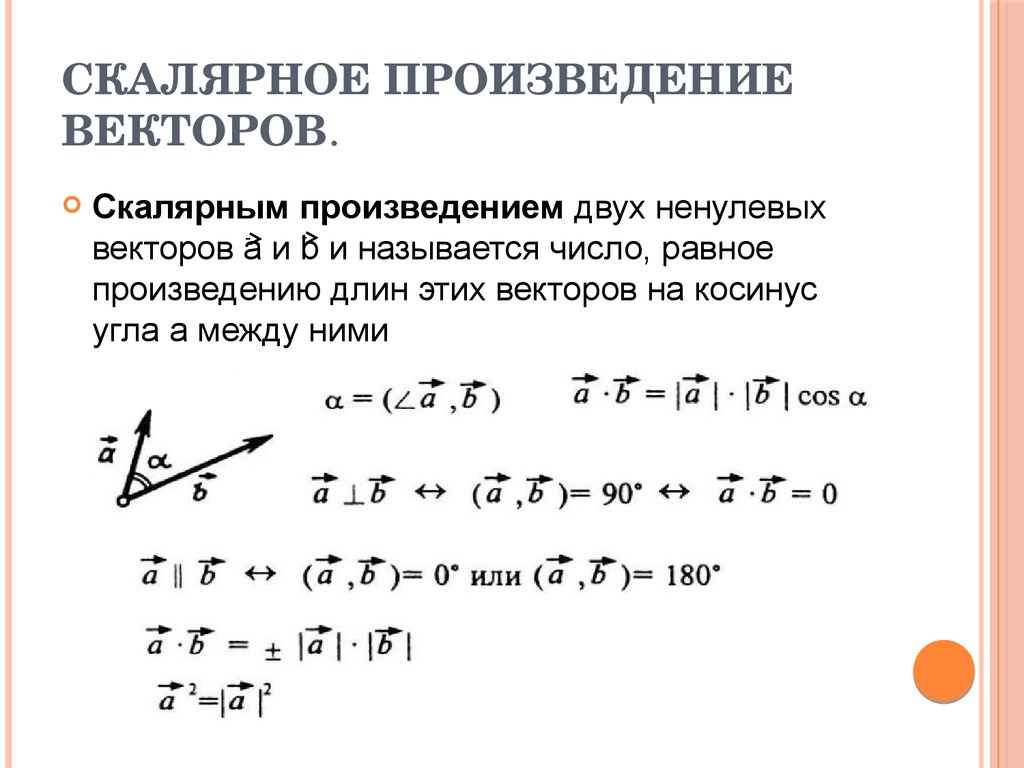 Достаточные признаки сходимости знакоположительных рядов Достаточные признаки сходимости знакоположительных рядов6. Знакопеременные ряды 7. Остаток ряда и его оценка § 2. ФУНКЦИОНАЛЬНЫЕ РЯДЫ 2. Правильно сходящиеся функциональные ряды и их свойства § 3. СТЕПЕННЫЕ РЯДЫ 2. Свойства степенных рядов 3. Ряды по степеням разности х-а 4. Разложение функций в степенные ряды. Ряд Тейлора 5. Разложение некоторых элементарных функций в ряды Тейлора и Маклорена § 4. ПРИЛОЖЕНИЕ РЯДОВ К ПРИБЛИЖЕННЫМ ВЫЧИСЛЕНИЯМ 2. Приближенное вычисление интегралов § 5. ПОНЯТИЕ О ФУНКЦИИ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ. СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 2. Числовые ряды с комплексными членами 3. Степенные ряды в комплексной области § 6. РЯДЫ ФУРЬЕ 2. Ряд Фурье 3. Сходимость ряда Фурье 4. Ряды Фурье для четных и нечетных функций 5. Разложение в ряд Фурье функций с периодом 2l ГЛАВА XII. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПЕРВОГО ПОРЯДКА 2. Дифференциальные уравнения первого порядка 3. 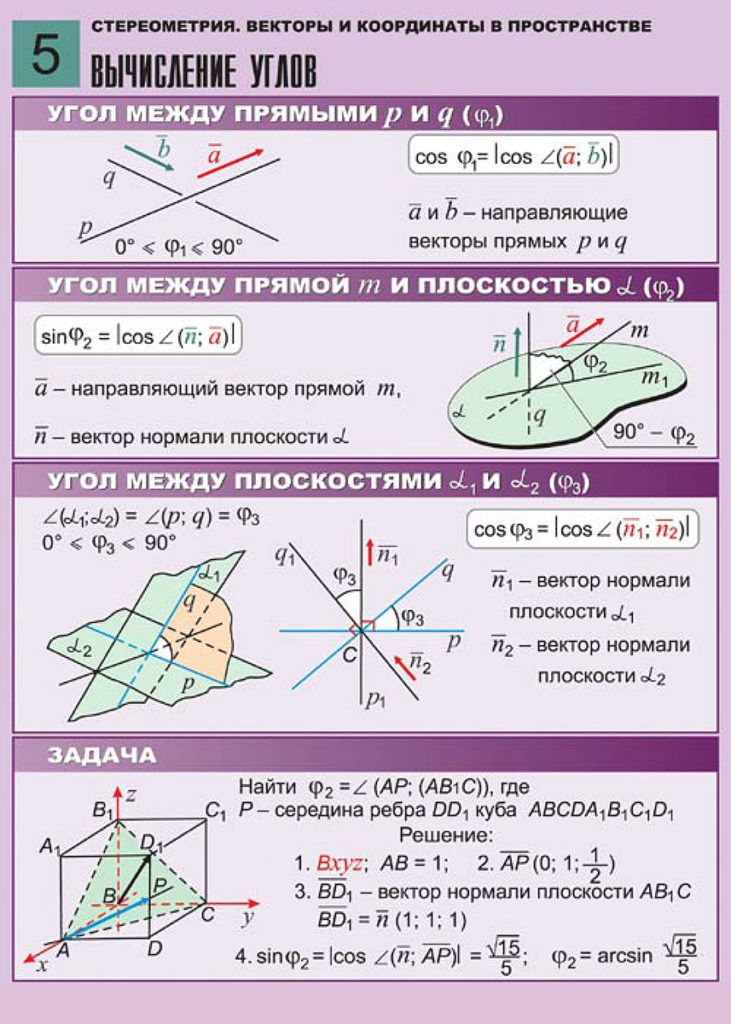 Уравнения с разделяющимися переменными Уравнения с разделяющимися переменными4. Однородные уравнения 5. Линейные уравнения 6. Уравнение в полных дифференциалах 7. Особые решения 8. Приближенное решение дифференциальных уравнений первого порядка методом Эйлера § 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Простейшие уравнения второго порядка, допускающие понижение порядка 3. Понятие о дифференциальных уравнениях высших порядков § 3. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Линейные однородные дифференциальные уравнения второго порядка 3. Линейные неоднородные дифференциальные уравнения второго порядка 4. Метод вариации произвольных постоянных § 4. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ 2. Линейные неоднородные дифференциальные уравнения второго порядка с постоянными коэффициентами 3. Приложение линейных дифференциальных уравнений второго порядка к изучению механических и электрических колебаний § 5. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВЫСШИХ ПОРЯДКОВ 2. 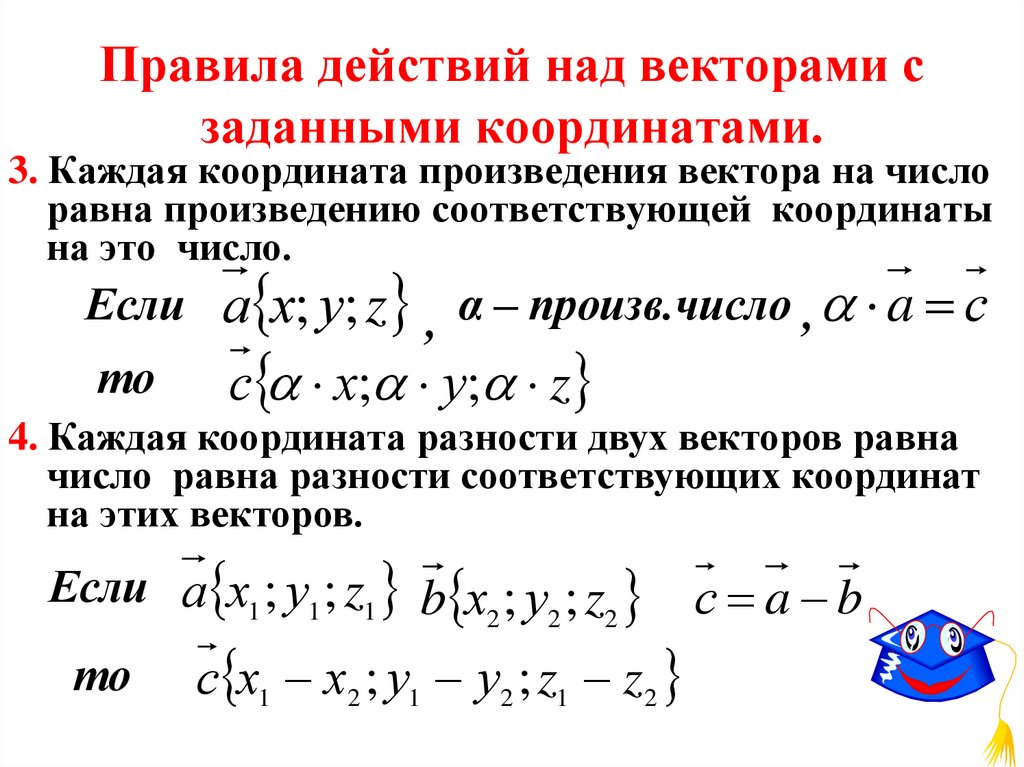 Линейные дифференциальные уравнения n-го порядка с постоянными коэффициентами Линейные дифференциальные уравнения n-го порядка с постоянными коэффициентами§ 6. ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОМОЩЬЮ РЯДОВ § 7. ПОНЯТИЕ О СИСТЕМАХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 2. Системы линейных дифференциальных уравнений с постоянными коэффициентами ПРИЛОЖЕНИЕ 1. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА НЬЮТОНА ПРИЛОЖЕНИЕ 2. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ |
Объяснение урока: Работа, совершаемая силой, выраженная в векторном представлении действуя на тело по вектору смещения с помощью скалярного произведения.
Работу, совершаемую силой над телом, можно определить следующим образом.
Определение: работа, совершаемая силой над телом
Работа, совершаемая силой над телом, зависит от силы, действующей на тело, и
расстояние, на которое тело перемещается в направлении действия этой силы по формуле
𝑊=𝐹⋅𝑑(𝜃), потому что где
𝐹 — величина силы, 𝑑 — величина
перемещение тела под действием силы, а 𝜃 –
угол между направлениями 𝐹 и 𝑑.
Альтернативным способом представления работы, совершаемой силой над телом, является представление сила и перемещение как векторы, а не как величины векторов.
Произведение двух векторов ⃑𝑎 и ⃑𝑏 может быть скалярным произведением векторов, которое определяется как следует.
Определение: Скалярное произведение двух векторов
Скалярное произведение двух векторов определяется как 𝜃 — угол между ⃑𝑎 и ⃑𝑏. Угол берется против часовой стрелки от от ⃑𝑎 до ⃑𝑏, как показано следующий рисунок.
Работа, совершаемая силой с величиной 𝐹 при перемещении с величина 𝑑 равна ⃑𝐹⋅⃑𝑑⃑𝐹⋅⃑𝑑=‖‖⃑𝐹‖‖‖‖⃑𝑑‖‖(𝜃).cos
Графическое представление ⃑𝐹 и ⃑𝑑 показывает, что произведение величины ⃑𝐹 и величина компонента ⃑𝑑 в направлении ⃑𝐹 есть равно ‖‖⃑𝐹‖‖‖‖⃑𝑑‖‖(𝜃)cos.
Скалярное произведение двух векторов, выраженных в компонентной форме, может быть определено без
речь идет об угле между векторами.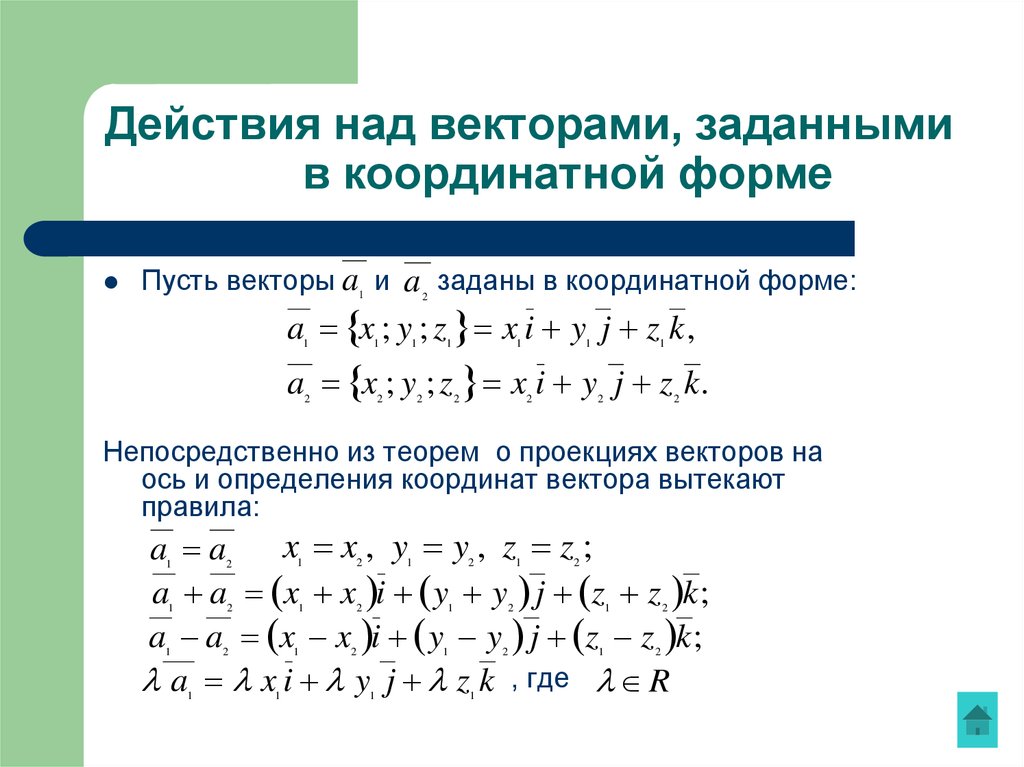
Предположим теперь, что векторы ⃑𝐹 и ⃑𝑑 перпендикулярны, как показано на следующем рисунке.
Произведение определяется как ⃑𝐹⋅⃑𝑑=(4,−3)⋅(3,4)⃑𝐹⋅⃑𝑑=(4×3)+(−3×4)=12−12=0.
Скалярное произведение двух перпендикулярных векторов равно нулю. На тело не действуют никакие силы направление перемещения, поэтому сила не действует на тело.
Давайте рассмотрим пример использования векторной записи для определения работы силы.
Пример 1. Расчет работы силы, действующей на частицу, где сила и положение даны в виде векторов
Частица движется в плоскости, в которой ⃑𝑖 и ⃑𝑗 — перпендикулярные единичные векторы. Сила ⃑𝐹=9⃑𝑖+⃑𝑗N действует на частицу. Частица движется из начала координат в точку с вектором положения −9⃑𝑖+6⃑𝑗 м. Найдите работу, совершенную силой.
Ответ
Работа силы равна скалярному произведению вектора силы и вектора смещения частицы. Вопрос не дает вектор смещения, однако он дает вектор положения.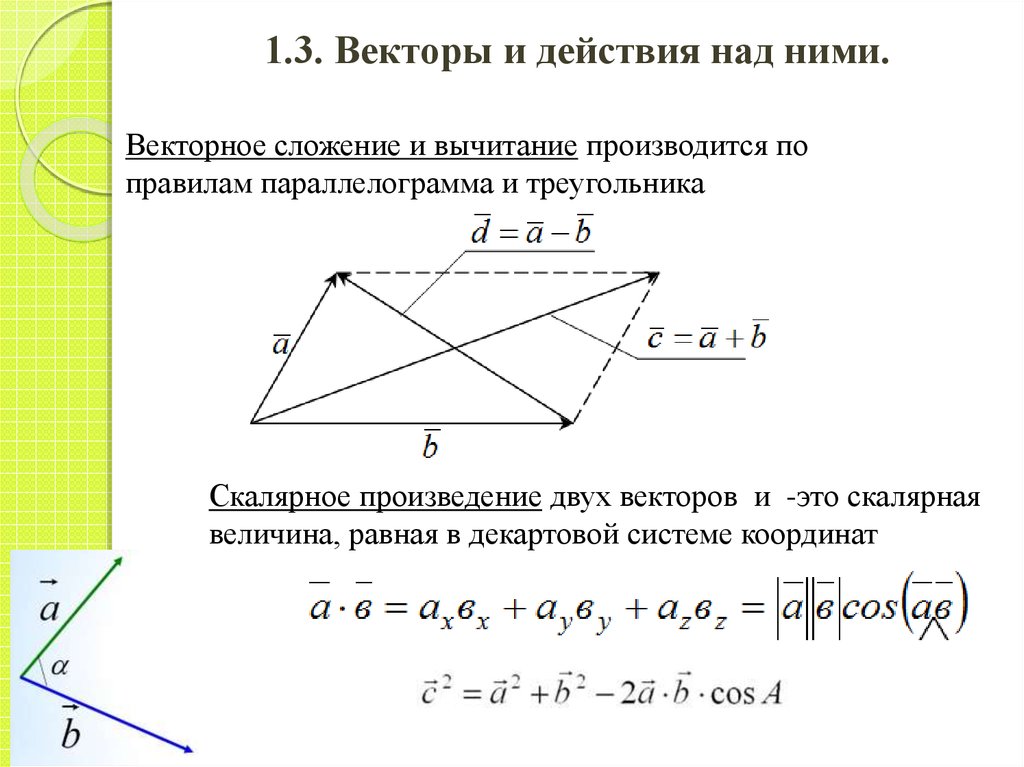 В вопросе также указано
что частица движется
в указанное положение от начала координат, поэтому вектор смещения частицы определяется выражением
⃑𝑑=(−9−0)⃑𝑖+(6−0)⃑𝑗,м
который равен заданному вектору положения.
В вопросе также указано
что частица движется
в указанное положение от начала координат, поэтому вектор смещения частицы определяется выражением
⃑𝑑=(−9−0)⃑𝑖+(6−0)⃑𝑗,м
который равен заданному вектору положения.
Работа силы 𝑊 определяется скалярным произведением векторов что определяется как 𝑊=(9,1)⋅(−9,6)𝑊=(9×−9)+(1×6)=−81+6=−75.
Таким образом, выполненная работа определяется выражением 𝑊=−75.J
Проделанная работа отрицательна. Если энергия частицы сохраняется, то кинетическая энергия частицы должна уменьшаться. Если энергия частицы не сохраняется, вместо этого проделанная работа может увеличить потенциальную энергию частицы.
Теперь давайте рассмотрим пример, когда на тело действуют несколько сил, вызывающих перемещение.
Пример 2. Нахождение работы равнодействующей двух сил, действующих на тело
Тело движется в плоскости, в которой ⃑𝑖 и
⃑𝑗 — перпендикулярные единичные векторы. Две силы ⃑𝐹=9⃑𝑖−2⃑𝑗N и
⃑𝐹=9⃑𝑖−7⃑𝑗N
действовать на тело. Частица движется
из точки с вектором положения
−6⃑𝑖+2⃑𝑗 м
к точке
2⃑𝑖+3⃑𝑗 м. Найдите работу равнодействующей сил.
Две силы ⃑𝐹=9⃑𝑖−2⃑𝑗N и
⃑𝐹=9⃑𝑖−7⃑𝑗N
действовать на тело. Частица движется
из точки с вектором положения
−6⃑𝑖+2⃑𝑗 м
к точке
2⃑𝑖+3⃑𝑗 м. Найдите работу равнодействующей сил.
Ответ
На тело действуют две силы. Силы являются векторами, и равнодействующая векторов может определяется суммированием компонент векторов. 𝑥-составляющая результирующей силы определяется выражением ⃑𝐹=9⃑𝑖+9⃑𝑖=18⃑𝑖,R а 𝑦-компонента равнодействующей силы определяется выражением ⃑𝐹=−2⃑𝑗−7⃑𝑗=−9⃑𝑗.R
Следовательно, результирующая сила, действующая на тело, равна ⃑𝐹=18⃑𝑖−9⃑𝑗.RN
Конечный вектор положения тела равен 2⃑𝑖+3⃑𝑗, а вектор начального положения тела равен −6⃑𝑖+2⃑𝑗.
Таким образом, вектор смещения из начального положения в конечное положение равен
⃑𝑑=2⃑𝑖+3⃑𝑗−−6⃑𝑖+2⃑𝑗⃑𝑑=2−(−6)⃑𝑖+(3−2)⃑𝑗=8⃑𝑖+⃑𝑗.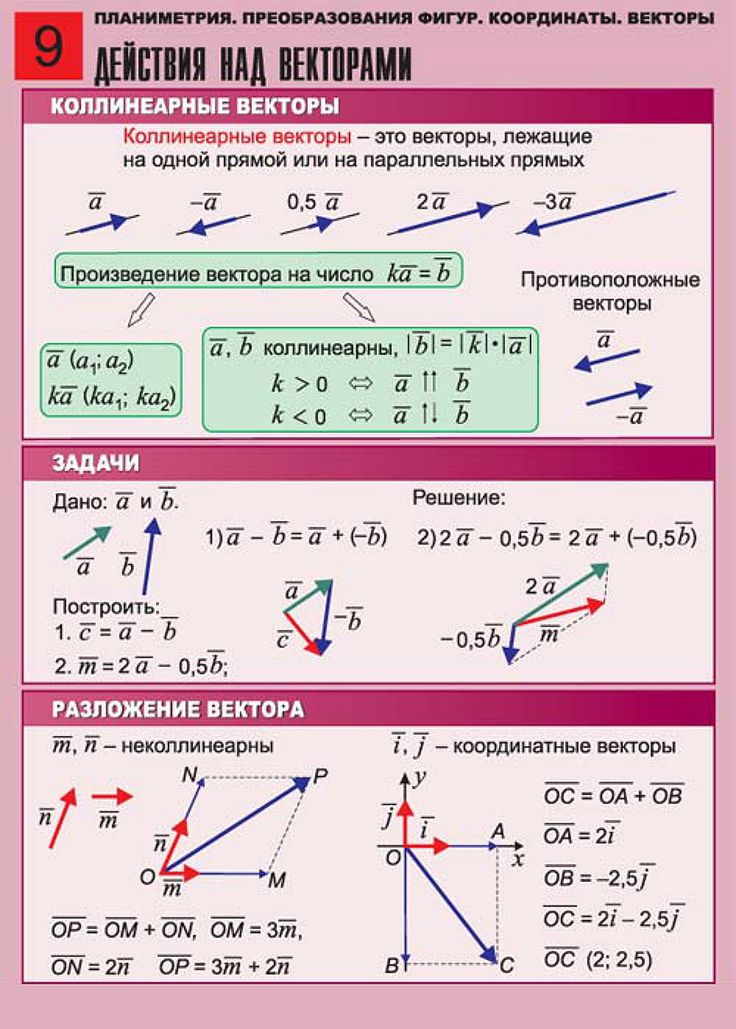 mm
mm
.mm
.mm , у нас есть это
𝑊=⃑𝐹⋅⃑𝑑,R
что дает нам
𝑊=(18,−9)⋅(8,1)𝑊=(18×8)+(−9×1)=144−9=135.J Теперь рассмотрим пример, в котором ни одна из компонент ни вектор силы, ни компоненты вектора смещения не заданы напрямую.
Пример 3. Использование векторов для нахождения работы силы с направлением и величиной, заданными отдельно
Частица переместилась из точки 𝐴(7,−3) в точку
𝐵(−9,2) по прямой под действием
силы ⃑𝐹 величины
8√10 Н
действует в том же направлении, что и вектор
⃑𝑐=−3⃑𝑖−⃑𝑗. Рассчитать работу
совершается силой, учитывая, что величина смещения
измеряется в метрах.
Ответ
Мы можем назвать вектор смещения 𝐴𝐵, ⃑𝑑. Вектор ⃑𝑑 показан с вектором ⃑𝑐 на следующем рисунке.
Вектор ⃑𝑑 задается
⃑𝑑=(−9−7)⃑𝑖+(2−(−3))⃑𝑗=−16⃑𝑖+5⃑𝑗.m
Скалярное произведение ⃑𝑑 и ⃑𝑐
не равно скалярному произведению ⃑𝑑 и ⃑𝐹.
Величина ⃑𝐹 дана, но использовать ⃑𝐹 через точку
расчет продукта, необходимо определить компоненты ⃑𝑖 и ⃑𝑗 ⃑𝐹.
Поскольку ⃑𝐹 действует по линии ⃑𝑐,
⃑𝑖 компонент ⃑𝐹
должна иметь величину, которая
в три раза больше величины ⃑𝑗 компонента ⃑𝐹. Эти отношения
можно выразить как
𝐹=3𝐹.
𝐹 и 𝐹 две стороны прямоугольного треугольника
с гипотенузой длиной 8√10. Поэтому это
в случае, когда
И снова, так как 𝐹=3𝐹,𝐹=24.
Зная компоненты ⃑𝐹, можно выразить ⃑𝐹
как ⃑𝐹=−24⃑𝑖−8⃑𝑗.N
Таким образом, выполненная работа 𝑊
𝑊=(−24,−8)⋅(−16,5)𝑊=(−24×−16)+(−8×5)=384−40=344.J
Теперь давайте рассмотрим другой пример, где ни компоненты
вектора силы, ни компоненты вектора смещения не заданы напрямую.
Пример 4. Нахождение работы векторной силы, действующей на тело, движущееся между двумя точками
Частица переместилась из точки 𝐴(−2,−2) в точку
𝐵(6,10) по прямой под действием
сила ⃑𝐹=𝑘⃑𝑖−6⃑𝑗
действующий в направлении, противоположном перемещению 𝐴𝐵. Найдите работу силы ⃑𝐹.
Ответ
Вектор смещения ⃑𝑑 — это вектор, хвост которого находится в точке ⃑𝐴
и его голова в ⃑𝐵. Вектор ⃑𝑑 задается выражением
⃑𝑑=(6−(−2))⃑𝑖+(10−(−2))⃑𝑗=8𝑖+12⃑𝑗.m
Направление ⃑𝑑 𝐴𝐵. Направление, в котором ⃑𝐹
действует противоположно 𝐴𝐵, поэтому ⃑𝐹
должен действовать вдоль прямой 𝐵𝐴𝐵𝐴=−8⃑𝑖−12⃑𝑗
Δ𝑦Δ𝑥=−12−8=32.
Чтобы ⃑𝐹 имел то же направление, что и
𝐵𝐴,
доля 𝑦-компоненты над
его 𝑥-компонента должна быть равна
𝐵𝐴. Следовательно, мы имеем это
Δ𝑦Δ𝑥=−6𝑘=32.
Перестановка, чтобы сделать 𝑘 предмет уравнения дает
3𝑘=−6×2𝑘=−4.
Теперь мы можем выразить ⃑𝐹 как
⃑𝐹=−4⃑𝑖−6⃑𝑗.N
Таким образом, выполненная работа 𝑊 равна
𝑊=(−4,−6)⋅(8,12)𝑊=(−4×8)+(−6×12)=−32−72=−104.J
Неудивительно, что проделанная работа отрицательна, поскольку сила действует в направлении, противоположном перемещению.
Когда энергия частицы, на которую действует сила, сохраняется, путь, который проходит частица, чтобы сместить ее, когда на нее действует сила, не влияет на работу, совершаемую этой силой над частицей.
Теперь рассмотрим пример, в котором рассматривается работа, совершаемая силой за интервал времени.
Пример 5. Определение работы силы при задании смещения во времени
Частица движется в плоскости, в которой ⃑𝑖 и
⃑𝑗 — перпендикулярные единичные векторы. Его водоизмещение
от источника в момент времени 𝑡 секунд
определяется выражением ⃑𝑟=2𝑡+7⃑𝑖+(𝑡+7)⃑𝑗m и на него действует
силой ⃑𝐹=6⃑𝑖+3⃑𝑗Н. Какую работу совершает сила между 𝑡=2с и
𝑡=3s?
Ответ
Включение в этот пример не требует, чтобы его решение сильно отличалось от предыдущих примеров, так как скалярные произведения векторов используются таким же образом. Единственная новая особенность, обнаруженная в этом примере, заключается в том, что мы должны найти
перемещения, которые соответствуют двум разным временам.
Смещение частицы при 𝑡=3 с и
𝑡=2с
должны быть определены. Это делается путем замены
3 и 2 как значения 𝑡, чтобы дать
⃑𝑑 и ⃑𝑑,
соответственно, что дает нам
⃑𝑑=2×3+7⃑𝑖+(3+7)⃑𝑗=25⃑𝑖+10⃑𝑗,⃑𝑑=2×2+7⃑𝑖+(2+7)⃑𝑑 15⃑𝑖+9⃑𝑗.мм
Смещение частицы между 𝑡=3 с и
𝑡=2s равно ⃑𝑑
минус ⃑𝑑, заданный
⃑𝑑−⃑𝑑=Δ𝑑=25⃑𝑖+10⃑𝑗−15⃑𝑖+9⃑𝑗=10⃑𝑖+⃑𝑗.m
Скалярное произведение ⃐
и Δ𝑑 дает нам выполненную работу, 𝑊,
между 𝑡=3s и
𝑡=2с. С
⃑𝐹=6⃑𝑖+3⃑𝑗,N
это дано
𝑊=(6,3)⋅(10,1)𝑊=(6×10)+(1×3)=63.J
Ключевые точки
- Работа, совершаемая постоянной силой ⃑𝐹 при перемещении
⃑𝑑 равно скалярному произведению
⃑𝐹 и ⃑𝑑,
𝑊=⃑𝐹⋅⃑𝑑,
или 𝑊=‖‖⃑𝐹‖‖‖‖⃑𝑑‖‖(𝜃), cos
где 𝜃 — угол между ⃑𝐹 и ⃑𝑑.
- Скалярное произведение ⃑𝐹 и ⃑𝑑 можно определить без использования угла 𝜃
выражая ⃑𝐹 и ⃑𝑑 в компонентной форме.
- Если компоненты ⃑𝐹 и ⃑𝑑
находятся в перпендикулярных направлениях ⃑𝑖 и
⃑𝑗, то
⃑𝐹⋅⃑𝑑=𝐹,𝐹⋅𝑑,𝑑=(𝐹𝑑)+𝐹𝑑.
Угол между двумя векторами Формула
Векторная величина – это физическая величина, имеющая как величину, так и направление. Когда на частицу действуют два вектора, результирующее действие на частицу будет зависеть от угла между этими векторами. Поэтому важно знать угол между ними.
Некоторые свойства вектора для вычисления угла
Вектор представлен стрелкой, параллельной направлению вектора.
- Вектор остается неизменным, если он передается параллельно самому себе.
- Два вектора, имеющие одинаковое направление, являются параллельными векторами.
- Два вектора, имеющие противоположные направления, являются антипараллельными векторами.
- Два вектора, имеющие одинаковую величину и направление, являются равными векторами.
- Два вектора, имеющие одинаковую величину и противоположное направление, называются отрицательными векторами.
Скалярное произведение
Также известно как скалярное произведение векторов. У него есть только величина, но нет направления.
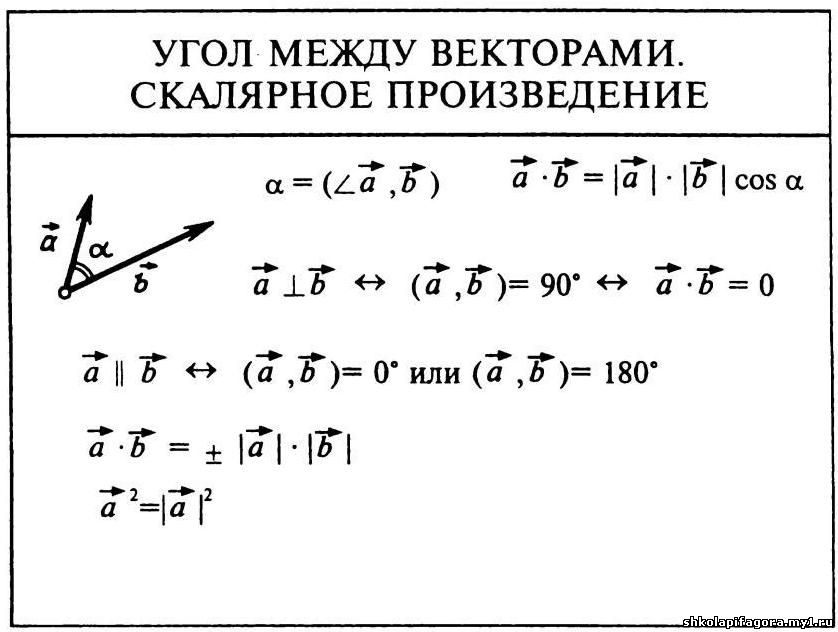
Два вектора A и B
Тогда скалярное произведение A и B определяется выражением,
= |A| |Б| cosθ.
Особые случаи
- Когда угол между векторами равен 0 градусов.
То есть θ = 0°
⇒ |A| |Б| cosθ.
⇒ |А| |Б| cos0°
⇒ |А| |Б| [cos0° = 1]
- Когда угол между векторами равен 180 градусов.
⇒ |А| |Б| cosθ.
⇒ |А| |Б| cos180°
⇒ – |A| |Б| [cos180° = -1]
- Когда угол между векторами равен 90 градусов.
⇒ |А| |Б| cosθ.
⇒ |А| |Б| cos90°
⇒ |А| |Б| × 0 [cos90° = 0]
⇒ 0,
Формула для угла между двумя векторами
Косинус угла между двумя векторами равен сумме произведений отдельных составляющих двух векторов, разделенных произведением величины двух векторов.
Два вектора A и B
=| А | | Б | cosθ.
cosθ =
θ = cos -1
в картезианской форме,
A = A x I + A y J + A Z K
3333333333333333. 332333333. 32333333333333333333333. B y j + B z k
cosθ =
Свойства скалярного произведения
- Скалярное произведение коммутативно.
- Дополнительный продукт является распределительным.
В физике при конвекции угол между двумя векторами лежит в пределах 0 ≤ θ ≤ 180. Когда хвосты или вершины обоих векторов совпадают, вычисляется угол между векторами.
Хвост совпадает
Голова совпадает
Проблемы с образцами
Вопрос 1: Найдите угол между векторами (если они образуют равносторонний треугольник)
- A и B векторы
- A и B векторы
- A и B векторы
- A и B. 0150
- a and c vectors
Equilateral Triangle formed by a, b, c vector
Solution:
- a and b vectors
For vector a and b, head of both the vectors совпадают друг с другом, следовательно, угол между векторами a и b равен углу между двумя сторонами равностороннего треугольника = 60°.
- Векторы b и c:
Из рисунка выше видно, что начало или конец вектора b и c не совпадают друг с другом.
Итак, с помощью свойства- Вектор остается неизменным, если он передается параллельно самому себе.
Вектор c смещен параллельно самому себе
Теперь мы видим, что хвосты векторов b и c совпадают друг с другом, следовательно, такой же, как внешний угол при равностороннем треугольнике = 120°.
- векторы a и c
Хвост векторов a и c совпадает
Для векторов a и c хвосты обоих векторов совпадают, поэтому угол между векторами a и c равен углу угол между двумя сторонами равностороннего треугольника = 60°.
Вопрос 2: Найдите углы между векторами, если они образуют равнобедренный прямоугольный треугольник.
- a and b vector
- b and c vector
- a and c vectors
Solution:
- a and b vector
Right angle Isosceles Triangle
Из приведенного выше рисунка видно, что начало или конец векторов a и b не совпадают друг с другом. Итак, с помощью свойства- Вектор остается неизменным, если он передается параллельно самому себе.
вектор сдвинут параллельно самому себе
Теперь хвосты векторов a и b совпадают и образуют угол, равный внешнему углу прямоугольного равнобедренного треугольника = 135°.
- Векторы b и c
Прямоугольный равнобедренный треугольник
На приведенном выше рисунке вершина или решка векторов b и c не совпадают. Таким образом, при использовании свойства вектор остается неизменным, если он передается параллельно самому себе.
b вектор сдвинут параллельно самому себе
Теперь хвосты векторов b и c совпадают и образуют угол, равный внешнему углу прямоугольного равнобедренного треугольника = 135°.
- Векторы a и c
Прямоугольный равнобедренный треугольник
На приведенном выше рисунке вершины и решки векторов a и c не совпадают. Итак, с помощью свойства- Вектор остается неизменным, если он передается параллельно самому себе.
вектор c перемещается параллельно самому себе
Теперь хвосты векторов a и c совпадают друг с другом и образуют угол, равный прямому углу равнобедренного треугольника = 90°.
Вопрос 3: Найдите угол между векторами A = i + j + k и вектором B = -2i – 2j – 2k.
Решение:
Из формулы,
A = A x I + A y J + A Z K
B = B 233333 3 33323 3 33323 3 3333 2333 2333 2333 2333 23 33323 2333 2333 2333 23 3333 2333 2333 2 3333. + B z k
cosθ=
Здесь в заданном вопросе
A= i + j + k.
В= -2i -2j -2k.
Подстановка значений в формулу
⇒ cosθ =
⇒ cosθ =
⇒ cosθ =
⇒ cosθ =
⇒ cosθ = -6/6
⇒ cosθ = -1
⇒ θ = 180 °.
Вопрос 4: Угол нахождения между вектором a = 3i + 4j и b = 2i + j
Решение:
A = A x I + A Y J + A 3333333333.. 33333333333.. k
B = B x i + B y j + B z k
cosθ =
Здесь дано,
A = 3i + 4J + 0K
B = 2i + J + 0K
Заменить значения в формуле,
⇒ COSθ =
⇒ Cosθ =
⇒ Cosθ =
⇒ Cosθ =
⇒ θ = cos -1 ()
⇒ θ = cos -1 ()
Вопрос 5: Найдите угол между вектором A = i + j и вектором B = j + k.
 Найдите работу силы ⃑𝐹.
Найдите работу силы ⃑𝐹.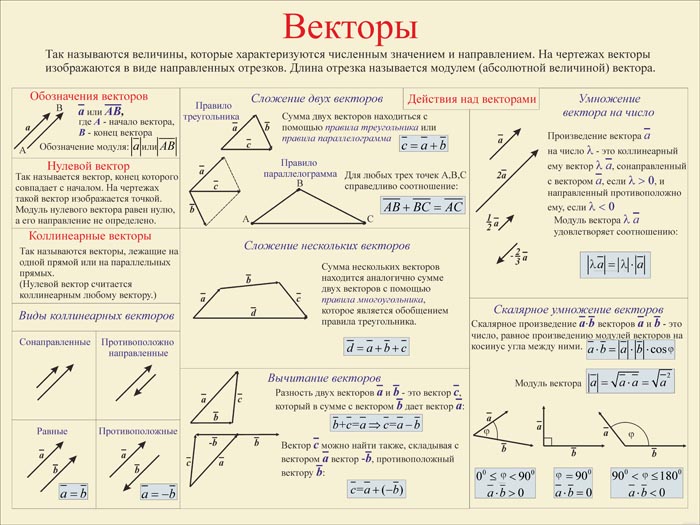
Косинус угла между двумя векторами равен сумме произведений отдельных составляющих двух векторов, разделенных произведением величины двух векторов.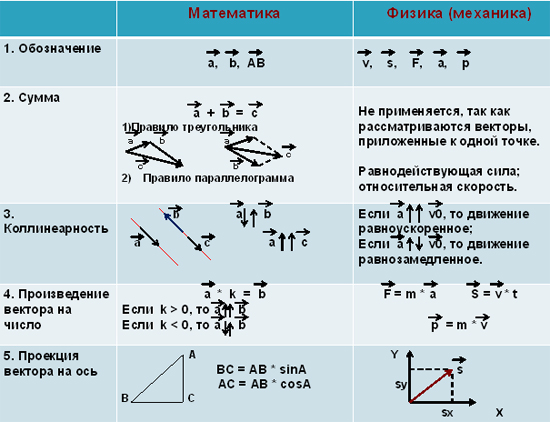
Два вектора A и B
=| А | | Б | cosθ.
cosθ =
θ = cos -1
в картезианской форме,
A = A x I + A y J + A Z K
3333333333333333. 332333333. 32333333333333333333333. B y j + B z k
cosθ =
 0150
0150- a and b vectors
For vector a and b, head of both the vectors совпадают друг с другом, следовательно, угол между векторами a и b равен углу между двумя сторонами равностороннего треугольника = 60°.
- Векторы b и c:
Из рисунка выше видно, что начало или конец вектора b и c не совпадают друг с другом.
Итак, с помощью свойства- Вектор остается неизменным, если он передается параллельно самому себе.
Вектор c смещен параллельно самому себе
Теперь мы видим, что хвосты векторов b и c совпадают друг с другом, следовательно, такой же, как внешний угол при равностороннем треугольнике = 120°.
- векторы a и c
Хвост векторов a и c совпадает
Для векторов a и c хвосты обоих векторов совпадают, поэтому угол между векторами a и c равен углу угол между двумя сторонами равностороннего треугольника = 60°.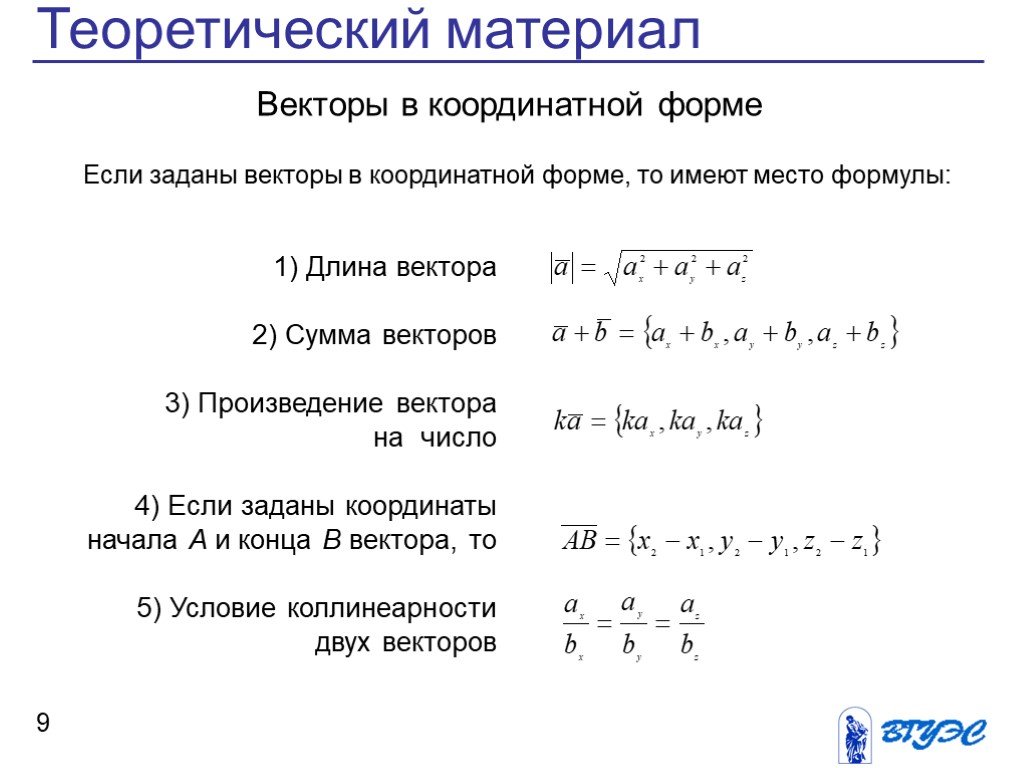
- a and b vector
Right angle Isosceles Triangle
Из приведенного выше рисунка видно, что начало или конец векторов a и b не совпадают друг с другом. Итак, с помощью свойства- Вектор остается неизменным, если он передается параллельно самому себе.
вектор сдвинут параллельно самому себе
Теперь хвосты векторов a и b совпадают и образуют угол, равный внешнему углу прямоугольного равнобедренного треугольника = 135°.
- Векторы b и c
Прямоугольный равнобедренный треугольник
На приведенном выше рисунке вершина или решка векторов b и c не совпадают.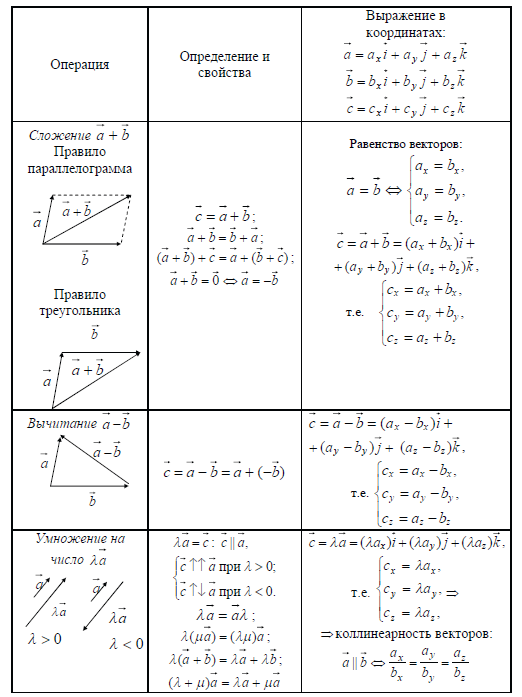 Таким образом, при использовании свойства вектор остается неизменным, если он передается параллельно самому себе.
Таким образом, при использовании свойства вектор остается неизменным, если он передается параллельно самому себе.
b вектор сдвинут параллельно самому себе
Теперь хвосты векторов b и c совпадают и образуют угол, равный внешнему углу прямоугольного равнобедренного треугольника = 135°.
- Векторы a и c
Прямоугольный равнобедренный треугольник
На приведенном выше рисунке вершины и решки векторов a и c не совпадают. Итак, с помощью свойства- Вектор остается неизменным, если он передается параллельно самому себе.
вектор c перемещается параллельно самому себе
Теперь хвосты векторов a и c совпадают друг с другом и образуют угол, равный прямому углу равнобедренного треугольника = 90°.
Из формулы,
A = A x I + A y J + A Z K
B = B 233333 3 33323 3 33323 3 3333 2333 2333 2333 2333 23 33323 2333 2333 2333 23 3333 2333 2333 2 3333.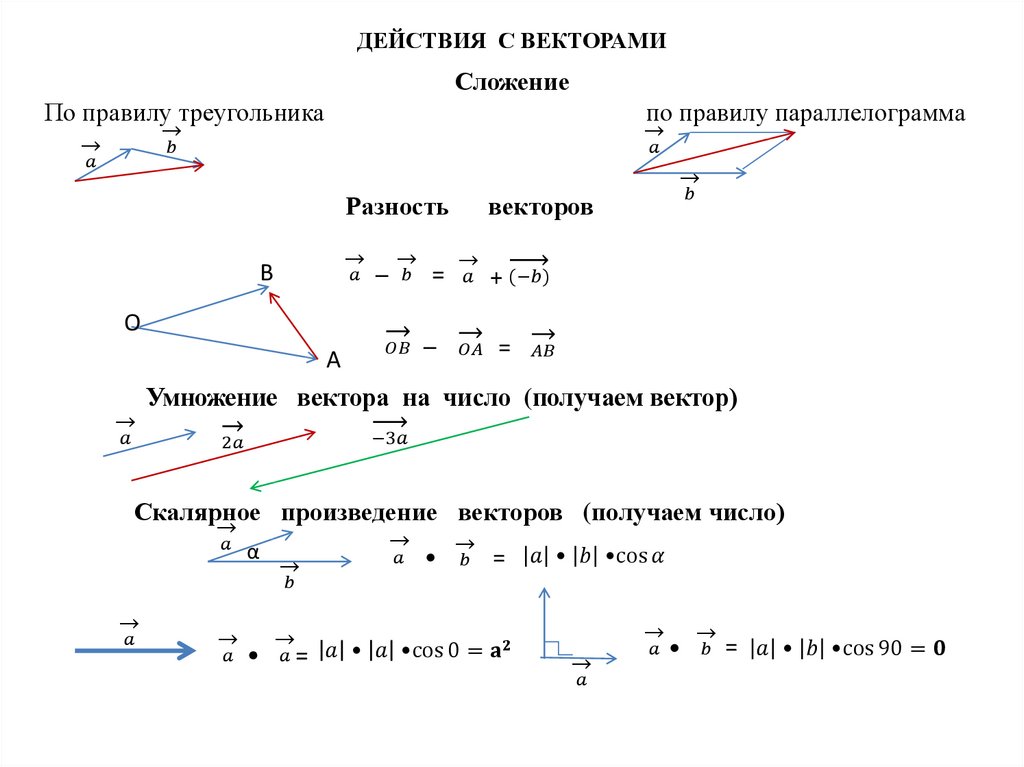 + B z k
+ B z k
cosθ=
Здесь в заданном вопросе
A= i + j + k.
В= -2i -2j -2k.
Подстановка значений в формулу
⇒ cosθ =
⇒ cosθ =
⇒ cosθ =
⇒ cosθ =
⇒ cosθ = -6/6
⇒ cosθ = -1
⇒ θ = 180 °.
A = A x I + A Y J + A 3333333333.. 33333333333.. k
B = B x i + B y j + B z k
cosθ =
Здесь дано,
A = 3i + 4J + 0K
B = 2i + J + 0K
Заменить значения в формуле,
⇒ COSθ =
⇒ Cosθ =
⇒ Cosθ =
⇒ Cosθ =
⇒ θ = cos -1 ()
⇒ θ = cos -1 ()