
Выбираем электросистему — AC или DC?
Какой мотор выбрать при заказе электрического транспортного средства — AC или DC?
В привычном нам мире двигателей внутреннего сгорания существует многообразие типов: рядные, V-образные, оппозитные, роторные и т.д. И до сих пор не выбран единственный, «лучший» тип двигателя. Разные типы двигателей существуют для удовлетворения различных потребностей, таких как цена или производительность. Это также применимо и к электромоторам.
При выборе гольфкара, электробуса или электрогрузовика одним из важнейших технических параметров является тип и мощность мотора. И если с мощностью все понятно – она должна быть достаточной для решения поставленных перед гольфкаром задач, то с типом мотора менее очевидно. На рынке представлены 2 типа – DC моторы (щеточно-коллекторные моторы постоянного тока) и AC моторы (синхронные моторы переменного тока). Иногда можно встретить бесщеточные BLDC моторы, либо асинхронные AC моторы, но это скорее экзотика в случае с низкоскоростным электротранспортом, поэтому не будем добавлять их к сравнению.
DC моторы
Многие производители ЭТС, в том числе и американские, до сих пор предлагают технику с щеточными DC моторами, обычно — в самых недорогих конфигурациях. Попробуем понять стоит ли на этом сэкономить.
Сильные стороны моторов:
• Щеточные DC моторы с последовательным возбуждением обмоток обладают большим крутящим моментом на старте и низких оборотах.
• DC моторы относительно компактны и обладают небольшой массой
• DC мотор прост в управлении, для него требуется более дешевый контроллер
А вот слабые стороны щеточных DC моторов:
• DC-мотор обладает щеточно-коллекторным узлом, который подвержен повышенному износу графитовых щеток и коллектора. Буквально – щетки истираются о коллектор, со временем они требуют замены и имеют свойство ломаться.
• Обмотки на статорах постоянного тока выделяют много тепла, которое требует сложных технологий для рассеивания, включая оребрение статора, охлаждение маслом и т.д.
• Крутящий момент DC-мотора снижается с ростом оборотов
AC моторы
AC мотор – изобретение гениального Николы Тесла. На данный момент электромоторы переменного тока потребляют 50% электроэнергии в мире, 90% электромоторов в промышленности – переменного тока. Секрет успеха – простота конструкции: статор, подключенный к 3-фазам, и ротор на подшипниках. Однако на электротранспорте AC моторы получили распространение только в последние 10 лет, давайте разберемся почему.
Чем хороши AC моторы:
• Высокая надежность за счет отсутствия трущихся деталей (щеток и коллектора)
• Более дешевое и редкое техническое обслуживание
• Рекуперативное торможение — накопить энергию от торможения двигателем так же легко, как и потратить энергию при ускорении. Некоторые системы DC также могут это сделать, но они не делают этого так же хорошо, и это всегда делает их более сложными и дорогими.
• В силу того, что АС контроллеры более сложные, у них шире функционал программирования, а значит у производителя и пользователей больше возможностей настройки электромобиля.
Резюмируем:
При эксплуатации AC мотор предпочтительнее. Единственная причина, по которой двигатели переменного тока не вытеснили DC моторы окончательно — это более высокая стоимость приобретения. Однако, надежность и эффективность техники наших клиентов для нас в приоритете. Поэтому мы в MassEV предлагаем к продаже гольфкары, электробусы, электрогрузовики и другую технику с AC моторами, но по цене версий с DC моторами.
Моторы постоянного тока [Амперка / Вики]
Понятие мотора
Электромотор — устройство для преобразования электрической энергии в механическую. То есть, устройство на которое надо подать электрический ток, а в замен получить вращение вала мотора.
Типичный мотор постоянного тока изображён ниже.
Устройство DC-мотора
Разберёмся как устроен мотор постоянного тока на примере простейшей модели.
У нас есть магнитное поле, генерируемое полюсами магнита и металлическая рамка. На клеммы «+» и «-» подаётся питающее напряжение (Up) мотора и по рамке начинает проходить постоянный электрический ток (
Для большей наглядности, можно посмотреть видео.
Характеристики моторов постоянного тока
Рассмотрим основные характеристики мотора на конкретном примере.
Электрические параметры
Рабочее напряжение — диапазон допустимых питающих напряжений. Чем питающее напряжение будет больше, тем больше будет мощность мотора и скорость вращения. Однако, бесконечно повышать напряжение нельзя, так как с каждым новым вольтом, повышается риск того, что мотор перегорит.
Для наглядности, проведем эксперимент: будем постепенно повышать питающее напряжение мотора, при этом будем контролировать потребляемый ток мультиметром.
Первое, что бросается в глаза — при повышении напряжения от 3 до 9 В, ток изменяется от 40 до 60 мА. Получается, что при увеличении напряжения в 3 раза, ток потребления увеличился всего 2 раза.
Теперь вспомним закон Ома:
Отсюда видно, что, при постоянном сопротивлении провода, ток в цепи должен увеличиваться во столько же раз, во сколько увеличивается напряжение. То есть, обмотка мотора (проволочная рамка) должна иметь переменное сопротивление.
Разберемся с этим парадоксом. Нашу проволочную рамку постоянно пронизывает магнитное поле. Если рамка начинает вращаться, то под действием магнитных сил, в ней возникает напряжение, направленное на противодействие внешних сил, то есть, против внешнего напряжения, которое мы подаем на мотор. Потому, в данном случае, закон Ома надо рассматривать вот так:
,
Чем быстрее вращается мотор, тем больше значение обратной электродвижущей силы, тем меньше будет потребляемый мотором ток. Поэтому, на холостом ходу мотор всегда потребляет меньший ток, чем под нагрузкой.
Номинальное напряжение — наиболее подходящее напряжение, для питания мотора, при котором мотор способен быстро вращаться, при этом не перегреваясь.
Ток без нагрузки — ток, потребляемый мотором на холостом ходу. Поскольку, на холостом ходу мотор вращается с максимальной скоростью, то потребляемый ток в таком режиме работы будет минимальным для конкретной модели мотора.
Ток при блокировке — ток, потребляемый мотором, при блокировке вала мотора. Данная величина тока потребления будет максимальной. Так как, блокировка вала означает — отсутствие вращения, поэтому будет полностью отсутствовать обратная электродвижущая сила. На практике данную величину можно измерить косвенно, не блокируя вал мотора. Для этого достаточно воспользоваться законом Ома:
U — напряжение питания. Его значение нам известно. R — сопротивление обмотки мотора. Данное значение можно измерить мультиметром, подключив его к клеммам мотора, как к обычному резистору.
Например, для нашего мотора измерим сопротивление обмотки R = 9.9 Ом. При напряжении питания 6 В, получаем:
Механические параметры
Диаметр выходного вала — диаметр подвижной оси мотора, которая совершает вращение.
Передача — полная аналогия с автомобилем. Внутри мотора установлена группа шестеренок, благодаря которым, можно, в известном соотношении, снизить скорость вращения вала мотора, но, при этом, увеличить его выходную мощность.
Скорость без нагрузки — скорость вращения вала мотора (количество оборотов в минуту) на холостом ходу.
Крутящий момент или момент силы — векторная физическая величина, характеризующая вращательное действие силы на твёрдое тело.
В нашем случае данная величина является произведением двух параметров: расстояние от оси мотора до точки прикрепления груза (см) и усилие (кг). Если вы собираете, например, дрель, то данная величина не должна вас сильно беспокоить. Однако, если вы хотите прикрепить к мотору втулку на вал, то надо помнить, что при увеличении диаметра втулки уменьшается максимальное усилие, которое может обеспечить мотор.
Двигатель постоянного тока — DC motor
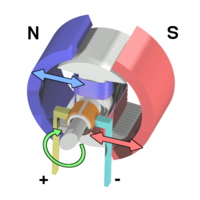 Выработки коллекторного электродвигателя с двухполюсным ротором (якорь) и постоянным магнитом статором. «N» и «S» , обозначают полярности на внутренних поверхностях оси магнитов ; внешние грани имеют противоположные полярности.
Выработки коллекторного электродвигателя с двухполюсным ротором (якорь) и постоянным магнитом статором. «N» и «S» , обозначают полярности на внутренних поверхностях оси магнитов ; внешние грани имеют противоположные полярности.  В классе DD1 локомотив Пенсильвании Железной дороги ходовой был полустационарном соединенной парой третьего рельса постоянного ток электровоз двигателей , построенных для начальной электрификации Нью-зона железной дороги , когда паровозы были запрещены в городе (тепловоз кабина удалена здесь).
В классе DD1 локомотив Пенсильвании Железной дороги ходовой был полустационарном соединенной парой третьего рельса постоянного ток электровоз двигателей , построенных для начальной электрификации Нью-зона железной дороги , когда паровозы были запрещены в городе (тепловоз кабина удалена здесь).Двигатель постоянного тока представляет собой любой из класса вращающихся электрических машин , который преобразует постоянный ток электрической энергии в механическую энергию. Наиболее распространенные типы полагаются на силы , создаваемых магнитными полями. Почти все типы двигателей постоянного тока имеют некоторый внутренний механизм, либо электромеханический или электронный, периодически изменять направление тока в части двигателя.
Двигатели постоянного тока были первая форма двигателя широко используется, так как они могут получать питание от существующих распределительных систем освещения мощности постоянного тока. Скорость двигателя постоянного тока можно управлять в широком диапазоне, используя либо переменное напряжение питания или путем изменения силы тока в его обмотках. Малые двигатели постоянного тока используются в инструменты, игрушки и техники. Универсальный двигатель может работать на постоянном токе , но это легкий щетку двигатель используется для портативных электроинструментов и приборов. Большие двигатели постоянного тока используются в настоящее время приведения в движение электрических транспортных средств, лифтов и подъемников, а также в приводах для стальных прокатных станов. Появление силовой электроники сделали замену двигателей постоянного тока с двигателями переменного тока возможны во многих приложениях.
Электромагнитные двигатели
Катушка провода с током , протекающим через него генерирует электромагнитное поле , совмещенное с центром катушки. Направление и величина магнитного поля , создаваемого катушкой может быть изменен с направлением и величиной тока , протекающего через него.
Простой двигатель постоянного тока имеет стационарное множество магнитов в статоре и арматуру с одним или несколькими витками изолированного провода , обернутой вокруг мягкого железного сердечника , который концентрирует магнитное поле. Обмотки обычно имеют несколько витков вокруг ядра, и в больших двигателях могут быть несколько параллельным путем тока. Концы проволоки обмоток подключены к коммутатору . Коммутатор позволяет каждой катушки якоря , чтобы находиться под напряжением , в свою очередь , и соединяет вращающиеся катушки с внешним источником питания через щетки. (Бесщеточные двигатели постоянного тока имеют электронику , которые коммутируют ток постоянного тока в каждую катушку и выключаться и не имеют кистей.)
Общее количество тока, посылаемого на катушку, размер катушки и то, что она обернута вокруг диктуют силы электромагнитного поля, создаваемого.
Последовательность превращения конкретной катушки включения или выключения диктата какого направление указали эффективные электромагнитные поля. При включении и выключении катушек в последовательности вращающееся магнитное поле может быть создано. Эти вращающиеся магнитные поля взаимодействуют с магнитными полями магнитов (постоянных или электромагнитов ) в неподвижной части двигателя (статор) , чтобы создать крутящий момент на арматуре , которая заставляет его вращаться. В некоторых конструкциях двигателя постоянного тока статор поле использует электромагниты для создания их магнитных полей , которые позволяют больший контроль над двигателем.
На высоких уровнях мощности, двигатели постоянного тока почти всегда охлаждаются с принудительной подачей воздуха.
Различное количество обмоток статора и якорь полей, а также как они связаны обеспечивают различные характеристики , присущие скорости / регулирование крутящего момента. Скорость двигателя постоянного тока можно регулировать путем изменения напряжения , приложенного к якорю. Введение переменного сопротивления в цепи цепи якоря или полей позволило контролировать скорость. Современные двигатели постоянного тока часто управляются силовыми электронными системами , которые регулируют напряжение на «разделочной» тока постоянного тока в включения и выключения циклов , которые имеют эффективный более низкое напряжение.
Так как двигатель постоянного тока с последовательным возбуждением развивает высокий крутящий момент на низких оборотах, он часто используется в тяговых приложениях , таких как электровозы и трамваи . Двигатель постоянного тока был оплотом электрических тяговых приводов на обоих электрических и дизель-электрических локомотивов , уличных автомобилей / трамваев и дизельные электрогенераторы буровых установок на протяжении многих лет. Введение двигателей постоянного тока и электрическая сеть система для запуска машины , начиная с 1870 — х годов начался новый второй промышленной революции . Двигатели постоянного тока могут работать непосредственно от аккумуляторных батарей, что обеспечивает движущую силу для первых электрических транспортных средств и современных гибридных автомобилей и электромобилей , а также вождение множества беспроводных инструментов. Сегодня двигатели постоянного тока до сих пор находят в приложениях , как малые , как игрушки и дисковые накопители, или в крупных размерах , чтобы работать стальные прокатные станы и бумагоделательных машин. Большие двигатели постоянного тока с отдельно возбуждаемых полей , как правило , используются с намоточных приводов для шахтных подъемников , для высокого крутящего момента, а также плавное регулирование скорости с использованием тиристорных приводов. Они теперь заменены большими двигатели переменного тока с частотно — регулируемыми приводами.
Если внешнее механическое питание подается к двигателю постоянного тока , он действует как генератор постоянного тока, в динамо . Эта функция используется , чтобы замедлить и перезарядить батареи на гибридный автомобиль и электромобилях или вернуть электричество обратно к электрической сети , используемой на улице автомобиле или электрического питание линии поезда , когда они замедляют. Этот процесс называется рекуперативного торможения на гибридных и электрических автомобилей. В дизельных электровозов они также используют двигатели постоянного тока в качестве генераторов , чтобы замедлить , но рассеивать энергию в резистивных стеков. Новые конструкции добавление больших аккумуляторов , чтобы вернуть часть этой энергии.
Матовый
Щетка постоянного ток Электродвигатель формирования крутящего момент от источника питания постоянного тока с помощью внутренней механической коммутации. Стационарные постоянные магниты образуют поле статора. Крутящий момент производятся по принципу , что любой проводник с током в пределах внешнего магнитного поля испытывает силу, известную как сила Лоренца. В двигателе, величина этой силы Лоренца (вектор , представленный зеленая стрелка), и , таким образом , выходной крутящий момент, является функцией для угла ротора, что приводит к явлению , известное как пульсации вращающего момента ) Так как это двухполюсный электродвигатель , коммутатор состоит из разрезного кольца, так что ток меняет каждую половину оборота (180 градусов).Щетка электрический двигатель постоянного тока генерирует крутящий момент непосредственно от источника постоянного тока , подаваемого на двигатель, используя внутреннюю коммутацию, стационарные магниты ( постоянные или электромагниты ), и вращающиеся электромагниты.
Преимущества щеточного электродвигателя постоянного тока включают в себя низкую начальную стоимость, высокую надежность и простое управление скоростью двигателя. К недостаткам можно отнести высокое содержание и низкую продолжительность жизни для высокой интенсивности использования. Техническое обслуживание включает в себя регулярно заменять угольные щетки и пружины , которые несут электрический ток, а также очистки или замены коммутатора . Эти компоненты необходимы для передачи электрической энергии из — за пределов двигателя к прядильной проволочных обмоток ротора внутри электродвигателя.
Кисти, как правило, изготовлены из графита или углерода, иногда с добавлением дисперсной меди, чтобы улучшить проводимость. При использовании мягкой щетки материал носит, чтобы соответствовать диаметру коллектора, и продолжает носить. Держатель щетки имеет пружину для поддержания давления на щетку, как это сокращает. Для щеток, предназначенных для перевозки более ампера или два, летающий свинец будет формовать в кисть и подключен к клеммам двигателя. Очень маленькие кисти может полагаться на скользящий контакт с держателем металлической щеткой, чтобы проводить ток в щетку, или может полагаться на контактной пружины давит на конце щетки. Щетки в очень маленьких, короткоживущих двигателях, такие, как используется в игрушках, могут быть изготовлены из сложенной полосы металла, который контактирует с Коллекторным.
Бесщеточный
Типичные бесщеточные двигатели постоянного тока используют один или несколько постоянных магнитов в роторе и электромагниты на корпусе двигателя для статора. Контроллер двигателя преобразует постоянный ток в сети переменного тока . Эта конструкция механически проще , чем шлифованные двигатели , поскольку он устраняет сложность передачи власти со стороны двигателя для вращающегося ротора. Контроллер двигателя может ощутить положение ротора с помощью эффекта Холла датчиков или подобных устройств и может точно контролировать время, фазу и т.п., ток в катушках ротора для оптимизации крутящего момента, экономии энергии, регулировать скорость, и даже применить некоторое торможение. Преимущества бесщеточных двигателей включают в себя длительный срок службы, практически не требуют обслуживания, и высокую эффективность. К недостаткам можно отнести высокую первоначальную стоимость, а также более сложные контроллеры скорости вращения двигателя. Некоторые такие бесщеточные двигатели иногда называют «синхронными двигателями» , хотя они не имеют никакого внешнего источника питания для синхронизации с, как это было бы в случае с обычными синхронными двигателями переменного тока.
Uncommutated
Другие типы двигателей постоянного тока не требуют коммутации.
- Униполярный двигатель — гомеополярном двигатель имеет магнитное поле вдоль оси вращения и электрического тока , что в какой — то момент не параллельно магнитному полю. Название гомеополярное относится к отсутствию изменения полярности. Гомеополярных моторы обязательно имеют одновитковую катушку, которая ограничивает их до очень низкого напряжения. Это ограничило практическое применение этого типа двигателя.
- Шаровой подшипник двигателя — Двигатель Подшипник шарика является необычным электрическим двигателем , который состоит из двух шариковых подшипников -типа подшипников, с внутренними рас смонтированных на общем валу, проводящим и наружных колец , соединенных с высоким током низкого напряжения источника питания. Альтернативная конструкция соответствует наружным кольцам внутри металлической трубки, в то время как внутренние кольца установлены на валу с непроводящей секцией (например , два рукава на изолирующую штанге). Этот метод имеет то преимущество , что труба будет действовать как маховик. Направление вращения определяется начальным спином , который, как правило , требуется , чтобы получить это происходит.
Постоянные магниты статоров
Двигатель ПМ не имеет поле обмотки на раме статора, вместо того, чтобы полагаться на ВЧ, чтобы обеспечить магнитное поле, на котором поле ротора взаимодействует с получением вращающего момента. Компенсирующие обмотки последовательно с якорем, могут быть использованы на больших двигателях для улучшения коммутации под нагрузкой. Поскольку это поле фиксировано, оно не может быть отрегулировано для управления скоростью. поля PM (статоры) удобны в миниатюрных двигателях, чтобы устранить потребление энергии поля обмотки. Большинство крупных двигателей постоянного тока типа «динамо», которые имеют обмотки статора. Исторически сложилось так, PMs не может быть сделано, чтобы сохранить высокий поток, если они были разобраны; обмотки возбуждения были более практичным, чтобы получить необходимое количество потока. Тем не менее, крупные PMs являются дорогостоящими, а также опасно и трудно собрать; это способствует раневых поля для больших машин.
Для того, чтобы минимизировать общий вес и размер, миниатюрные PM двигатели могут использовать высокоэнергетические магниты , сделанные с неодимом или другими стратегическими элементами; Наиболее такие неодим-железо-бор сплава. С их более высокой плотностью потока, электрических машин с высокой энергией PMs, по крайней мере конкурентоспособны со всеми оптимально подобранной по отдельности кормили синхронных и асинхронных электрических машин. Миниатюрные моторы напоминают структуру на рисунке, за исключением того, что они имеют по меньшей мере три полюса ротора (для обеспечения запуска, независимо от положения ротора) и их наружный корпус представляет собой стальную трубу , которая связывает магнитно экстерьеры изогнутых полевых магнитов.
раной статоров
 Катушка поля может быть подключена в шунте, последовательно, или в соединении с якорем машины постоянного тока (двигатель или генератор)
Катушка поля может быть подключена в шунте, последовательно, или в соединении с якорем машины постоянного тока (двигатель или генератор)Существует три типа электрических соединений между статором и ротором, возможным для электродвигателей постоянного тока: серия, шунт / параллельно и соединение (различные смеси серии и шунт / параллельно) и каждый из них имеет уникальные характеристики скорости / крутящий момент, подходящие для различных профилей нагрузки крутящего момента / подписи.
последовательное соединение
Двигатель постоянного тока серии соединяет якоря и обмотки возбуждения в серии с общим источником питания постоянного тока. Скорость двигателя изменяется в нелинейной зависимости от момента нагрузки и тока якоря; тока является общим для обоих статора и ротора , получа квадрат тока (^ 2 I) поведение. Двигатель серии имеет очень высокий пусковой момент и обычно используется для запуска высоких нагрузок инерции, таких как поезда, лифты или подъемники. Эта скорость / крутящий момент характеристика полезна в таких приложениях, как драглайн экскаваторы , где инструмент рытье быстро двигается , когда выгружается , но медленно при перевозке тяжелого груза.
Двигатель серии никогда не следует начинать при отсутствии нагрузки. При отсутствии механической нагрузки на двигателе серии, ток низкий, движущей силой контр-Электро производство обмотки возбуждения является слабым, и поэтому якорь должен повернуть быстрее, чтобы производить достаточную встречную EMF, чтобы сбалансировать напряжение питания. Двигатель может быть поврежден превышением скорости. Это называется беглым состоянием.
Серии двигателей называемые универсальные двигатели могут быть использованы на переменном токе . Так как напряжение якоря и направление поля обратного в то же время, крутящий момент продолжает выпускаться в том же направлении. Однако они работают на более низкой скорости с меньшим крутящим моментом на сети переменного тока по сравнению с DC из — за реактивное падение напряжения в сети переменного тока , которая не присутствует в DC.Since скорость не связана с частотой линии, универсальные двигатели могут развивать более-чем- синхронные скорости, что делает их легче , чем асинхронных двигателей той же номинальной механической продукции. Это ценная характеристика для ручных электроинструментов. Универсальные двигатели для коммерческой полезности , как правило , малой мощности, мощность не более чем около 1 кВт. Тем не менее, гораздо более крупные универсальные двигатели были использованы для электровозов, кормил специальных низкочастотных сетей тяговых мощностей , чтобы избежать проблем с коммутацией под тяжелыми и различные нагрузками.
Шунт соединение
Шунт двигатель постоянного ток соединяет якоря и обмотки возбуждения параллельно или шунт с общим источником питания постоянного тока. Этот тип двигателя имеет хорошее регулирование скорости, даже когда нагрузка меняется, но не имеет пусковой момент двигателя серии DC. Это, как правило, используется для промышленных применений, регулируемые скорости, например, станков, намоточных / размотки машин и натяжных устройств.
соединение соединение
Соединение постоянного тока соединяет якоря и поля обмотки шунт и сочетание серии, чтобы придать ему характеристики как шунт и двигатель серии DC. Этот двигатель используется, когда и высокий пусковой момент и хорошее регулирование скорости требуются. Двигатель может быть подключен в двух механизмов: совокупно или по-разному. Совокупные соединение двигатели подключить поле серии, чтобы помочь полю шунта, который обеспечивает более высокий пусковой момент, но меньше регулирования скорости. Дифференциальное соединение постоянный ток имеет регулирование хорошей скорости и, как правило, работает на постоянной скорости.
Смотрите также
внешняя ссылка
Рекомендации
- ^ Герман, Стивен. Промышленные системы управления двигателя. 6й изд. Дельмар, Cengage обучения, 2010. Page 251.
- ^ Огайо электромоторы. DC серия двигатели: высокий пусковой момент , но без нагрузки Операции Жестокой не рекомендуется. Огайо электромоторы, 2011. Дата архивации 8 ноября 2011 г., WebCite
- ^ «Универсальный двигатель» , Строительство и рабочие характеристики, Возвращаемые 27 апреля 2015 года.
- ^ Лоутон MA и Варн DF, редакторы. Справочник инженера — электрика в. Шестнадцатый ред. Newnes, 2003. 19-4.
- ^ Уильям Х. Yeadon, Алан У. Yeadon. Справочник малых электродвигателей. McGraw-Hill Professional, 2001. Page 4-134.
 |
Безщёточные микромоторы постоянного тока, smoovy® Technology, Faulhaber
|
 |
Тонкие безщёточные DC-моторы – penny-motor® Technology, Faulhaber
|
 |
Точные DC-Микромоторы, Faulhaber
|
 |
DC-мотор-редукторы, BühlerВ ассортименте компании Bühler широкий выбор щеточных двигателей с постоянным датчиком магнита. Многие двигатели поставляются вместе с дифференциалом. Самые маленькие модели диаметром до 31 мм оснащены подшипником скольжения. Номинальное напряжение двигателей 6,12,18 или 24 В. Диапазон мощности 4…95 Вт, скорость вращения варьируется от 3000 до 5000 об./мин. Многие двигатели поставляются вместе с дифференциалом. Номинальные моменты двигаются в диапазоне 45 мНм…5 Нм, номинальная скорость 1…1000 об./мин. |
 |
DC-мотор-редукторы, Servo Japan Servo Широкий выбор двигателей 12 и 24В и зубчатых передаточных механизмов, которые можно заказать отдельно. Следовательно, с помощью одного двигателя достигается широкий диапазон скорости.
|
 |
DC-мотор-редукторы, ZeitlaufВ двигателях Zeitlauf двигатель можно выбрать по необходимости. Для таких двигателей типичен тихий и ровный ход. Передачи могут быть короткие или длинные, зубчатые, планетарные или угловые. Диаметр 32 -81 мм, срок службы более 5000 часов, точнее 20 радианных минут. В программе склада более 3100 вариантов двигателей с передачей с короткими сроками поставки. В комплектации контроллеры, импульсные датчики и тормоза. Дополнительно большой выбор решений с учетом пожеланий заказчика. |
 |
Безщёточные DC-моторы, Faulhaber
|
 |
Безщеточные двигатели постоянного тока Orientalmotor КАТАЛОГ ПРОДУКЦИИ Orientalmotor Двигатели небольшого размера, очень мощные, быстрые, широкий диапазон регулировки скорости. Крутящий момент ровный как на малых, так и на больших скоростях. Доступны типы AC и DC. Серия BLF
|
 |
Серия BLU
|
 |
Серия BLH
|
 |
Безщёточные DC-моторы, Nidec-Servo Серия FHD — 24 В (20 Вт, 40 Вт), 48 В (60 Вт) Электродвигатели серии FHD отличаются небольшим весом и малыми размерами, а их производительность выше в сравнении со стандартными электродвигателями типа FED и FYD.
|
 |
Серия FYD, 24 ВПлоские электродвигатели этой серии отличаются лёгкостью конструкции по сравнению со стандартными двигателями переменного тока. Для двигателей BDC серии FYD пригодны такие же редукторы Japan Servo FBN, как и в электродвигателях переменного тока.
|
 |
Серия FED, 24 В (3 Вт, 10 Вт, 30 Вт)Стандартные электродвигатели серии FED с контроллером Palm Mini size (57 x 73 мм). Возможны варианты монтажа контроллера в вертикальном и горизонтальном положениях, а также их совмещение в целях экономии места. |
|
AC-мотор-редукторы, Orientalmotor Работа двигателей Orientalmotor – AC основана на подключении конденсатора и питании тока от источника. Двигатели AC включают обычный и реверсивный двигатель. Существуют также тормозные двигатели Oriental Motor, двигатели с регулировкой момента и скорости. Защищенные от пыли и влаги двигатели могут использоваться для разных целей. КАТАЛОГ Orientalmotor |
|
 |
Серия World K
|
 |
Серия FPW
|
 |
AC-мотор-редукторы, WEGШирокий ассортимент одно и трехфазных двигателей с угловой или зубчатой передачей или без них. Двигатели могут быть оснащены теплозащитой, тормозом и аналоговым или цифровым тахогенератором.
Используются в конвейерах, упаковочных аппаратах и строительстве станков. Редукторы с втулочным валом серии FB 30, WEG Структура оснащена поворотными осями для удобства установки в ограниченном пространстве. Глубина установки примерно на 50% меньше в сравнении с обычным зубчатым двигателем. Самый большой момент передаче 30 Н*М. Используется, например, в транспортерах с отдельным моторным приводом.
|
 |
AC-мотор-редукторы, HeidolphШирокий выбор небольших передаточных двигателей AC. Изделия серии Heidrive® компактные, бесшумные и легки в обслуживании. Скорость вращения до 2700 об./мин. Зубчатые передачи, 7 вариантов
Конусная зубчатая передача, 3 варианта
Червячная передача
Область применения: вспомогательные средства для людей с ограниченными возможностями, печатные станки, холодильное оборудование и автомобильная промышленность. |
 |
DC-мотор-редукторы, ZeitlaufВ двигателях Zeitlauf мотор можно выбрать по необходимости. Для двигателей этой фирмы типичен тихий и ровный ход. Передачи могут быть короткими или длинными, зубчатыми, планетарными или угловыми. Диаметр 32 -81 мм, срок службы более 5000 часов, точнее 20 радиальных минут. В программе склада более 3100 вариантов с небольшими сроками поставки. В комплектации электроника, импульсные датчики и тормоза. Широкий ассортимент решений в соответствии с пожеланиями заказчика. |
 |
Модули линейного перемещения Линейные DC-сервомоторы, QUICKSHAFT® Technology, Faulhaber
|
 |
Линейные двигатели OrientalmotorЛинейный механизм Orientalmotor включает двигатель и линейную передачу. Владея необходимыми навыками и опытом в области двигателей, производитель предлагает широкий выбор линейных механизмов разного размера и формы с разными типами двигателей, способами управления и источниками мощности.
|
 |
Линейный двигатель Copley ControlsДвигатель Copley Controls используется для многих целей благодаря широкому спектру свойств. Ровная скорость движения от микрона до 5,5 метров в секунду. Ускорение максимум 50G, остановка — несколько микрон. Движущаяся масса около 20 кг/механизм (механизмов может быть много на одной оси), ходы всегда до 1300 мм. Двигатель бывает трех разных размеров. Размер определяется в соответствии с диаметров магнитного стержня, может быть 11, 25 или 38 мм. Все стационарные механизмы относятся к классу защиты IP67. Можно также заказать готовую систему осей XYZ с усилителями. Copley производит также контроллеры серводвигателей. |
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, виды
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение. Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
 и бесколлекторного электродвигателя (справа)")
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).

Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.

Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.

В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.

В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.

Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.
 и outrunner (справа)")
Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.

В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:

Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.
Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!
Материалы по теме:
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.
Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = См * Iя * Ф
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.