
Что такое шаговый двигатель, и зачем он нужен?
Шаговый двигатель — это электромеханичское
устройство, которое преобразует электрические импульсы в дискретные
механические перемещения. Так, пожалуй, можно дать строгое определение.
Наверное, каждый видел, как выглядит шаговый двигатель внешне: он
практически ничем не отличается от двигателей других типов. Чаще всего это
круглый корпус, вал, несколько выводов (рис. 1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
- прецизионное позиционирование и повторяемость.

- возможность быстрого старта/остановки/реверсирования
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов

Но не все так хорошо…
- шаговым двигателем присуще явление резонанса
- возможна потеря контроля положения ввиду работы без обратной связи
- потребление энергии не уменьшается даже без нагрузки
- затруднена работа на высоких скоростях
- невысокая удельная мощность
- относительно сложная схема управления
Что выбрать?
Шаговые двигатели относятся к классу бесколлекторных
двигателей постоянного тока. Как и любые бесколлекторные двигатели, они
имеют высокую надежность и большой срок службы, что позволяет использовать
их в критичных, например, индустриальных применениях. По сравнению с
обычными двигателями постоянного тока, шаговые двигатели требуют
значительно более сложных схем управления, которые должны выполнять все
коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель
— дорогостоящее устройство, поэтому там, где точное позиционирование не
требуется, обычные коллекторные двигатели имеют заметное преимущество.
Справедливости ради следует отметить, что в последнее время для управления
коллекторными двигателями все чаще применяют контроллеры, которые по
сложности практически не уступают контроллерам шаговых двигателей.
Как и любые бесколлекторные двигатели, они
имеют высокую надежность и большой срок службы, что позволяет использовать
их в критичных, например, индустриальных применениях. По сравнению с
обычными двигателями постоянного тока, шаговые двигатели требуют
значительно более сложных схем управления, которые должны выполнять все
коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель
— дорогостоящее устройство, поэтому там, где точное позиционирование не
требуется, обычные коллекторные двигатели имеют заметное преимущество.
Справедливости ради следует отметить, что в последнее время для управления
коллекторными двигателями все чаще применяют контроллеры, которые по
сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является
возможность осуществлять точное позиционирование и регулировку скорости
без датчика обратной связи. Это очень важно, так как такие датчики могут
стоить намного больше самого двигателя. Однако это подходит только для
систем, которые работают при малом ускорении и с относительно постоянной
нагрузкой. В то же время системы с обратной связью способны работать с
большими ускорениями и даже при переменном характере нагрузки. Если
нагрузка шагового двигателя превысит его момент, то информация о положении
ротора теряется и система требует базирования с помощью, например,
концевого выключателя или другого датчика. Системы с обратной связью не
имеют подобного недостатка.
Однако это подходит только для
систем, которые работают при малом ускорении и с относительно постоянной
нагрузкой. В то же время системы с обратной связью способны работать с
большими ускорениями и даже при переменном характере нагрузки. Если
нагрузка шагового двигателя превысит его момент, то информация о положении
ротора теряется и система требует базирования с помощью, например,
концевого выключателя или другого датчика. Системы с обратной связью не
имеют подобного недостатка.
При проектировании конкретных систем приходится делать
выбор между сервомотором и шаговым двигателем. Когда требуется
прецизионное позиционирование и точное управление скоростью, а требуемый
момент и скорость не выходят за допустимые пределы, то шаговый двигатель
является наиболее экономичным решением. Как и для обычных двигателей, для
повышения момента может быть использован понижающий редуктор. Однако для
шаговых двигателей редуктор не всегда подходит.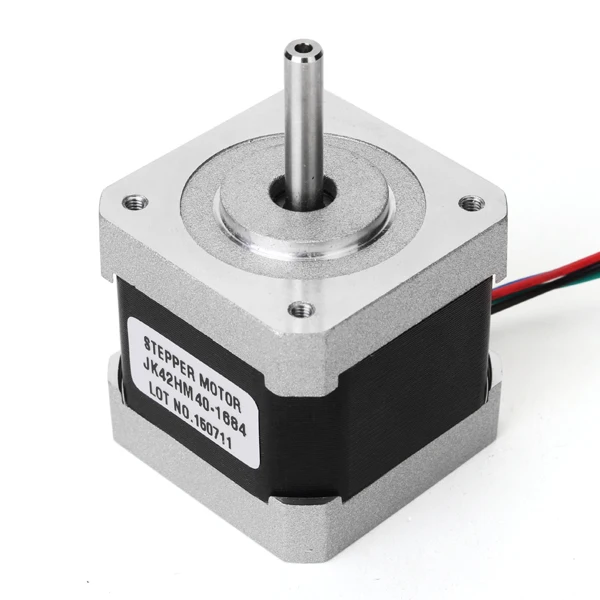
Возможность получения низкой частоты вращения часто
является причиной того, что разработчики, будучи не в состоянии
спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В
то же время коллекторный двигатель имеет более высокую удельную мощность,
низкую стоимость, простую схему управления, и вместе с одноступенчатым
червячным редуктором он способен обеспечить тот же диапазон скоростей, что
и шаговый двигатель.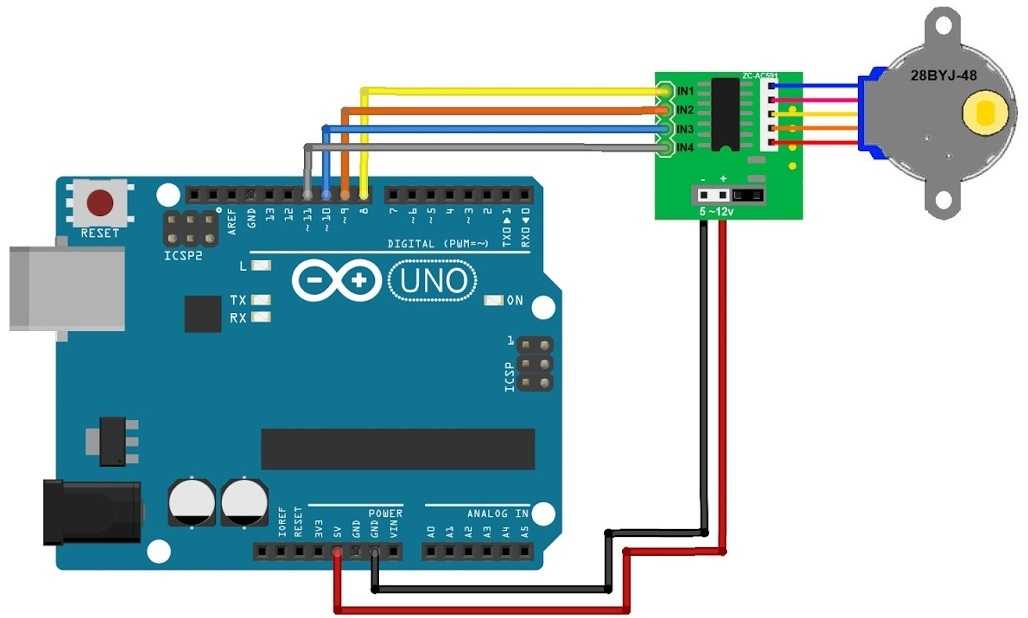 К тому же, при этом обеспечивается значительно
больший момент. Приводы на основе коллекторных двигателей очень часто
применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной
бытовой технике, автомобилях, промышленном оборудовании коллекторные
двигатели распространены достаточно сильно. Тем не менее, для шаговых
двигателей имеется своя, хотя и довольно узкая, сфера применения, где они
незаменимы.
К тому же, при этом обеспечивается значительно
больший момент. Приводы на основе коллекторных двигателей очень часто
применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной
бытовой технике, автомобилях, промышленном оборудовании коллекторные
двигатели распространены достаточно сильно. Тем не менее, для шаговых
двигателей имеется своя, хотя и довольно узкая, сфера применения, где они
незаменимы.
| Применение шаговых двигателей Биполярные и униполярные шаговые двигатели Шаговые двигатели с постоянными магнитами Гибридные шаговые двигатели |
Виды шаговых двигателей Двигатели с переменным магнитным сопротивлением |
Что такое шаговый двигатель и как им управлять
Шаговый двигатель – это устройство, преобразующее электрическую энергию в механическую. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять.
Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования.
Популярно использование шагового двигателя и в точной робототехнике.
Устройство шагового двигателя
Как любой мотор, шаговый двигатель состоит из статора и ротора. Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения.
В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя. Поэтому разбирать двигатель категорически не рекомендуется.
Принцип работы шагового двигателя
Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода
В отличие от сервопривода шаговый двигатель перемещается по шагам. Благодаря этому с его помощью можно совершать очень точные движения. Угол поворота выходного вала сервопривода обычно ограничен диапазоном от 0°C до 180°C. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом.
Основные технические характеристики шагового двигателя
Крутящий момент — механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление.
Удерживающий момент – это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент (тормозящий момент) нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции.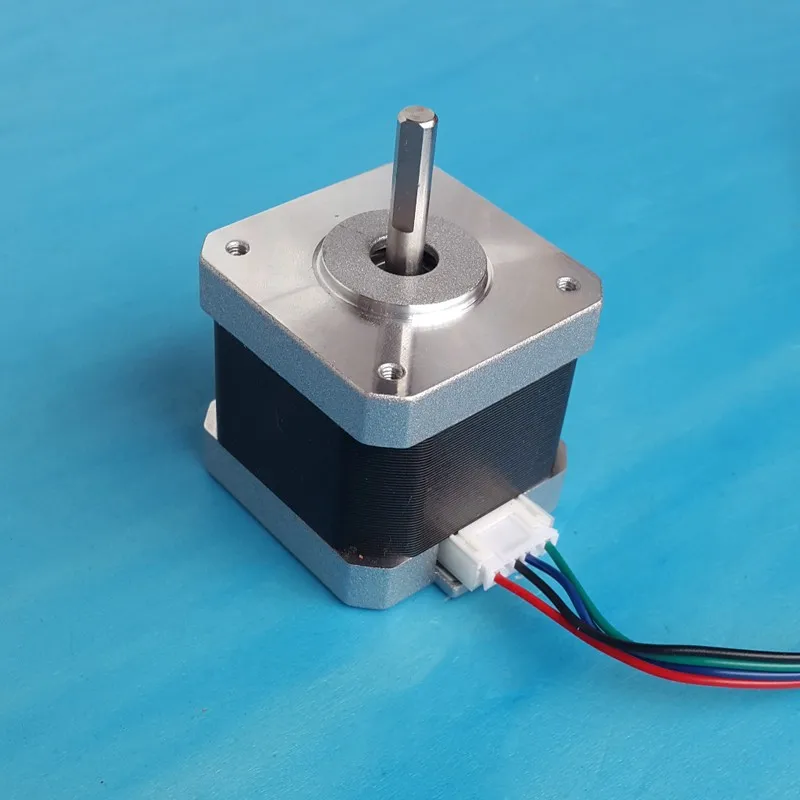 При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
Номинальное напряжение – зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение.
Номинальный ток – подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага – способность двигателя совершать перемещение при одном шаге, указывается в градусах.
Момент инерции ротора – влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора.
Длина двигателя – длина корпуса без вала.
Типы шаговых двигателей
По строению различают следующие типы шаговых двигателей:
Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре.
Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока.
По типу обмотки шаговый двигатель может быть униполярным и биполярным.
Преимущества шаговых двигателей
• Главное преимущество шагового двигателя – это точность величины шага.
• Шаговый двигатель может быть быстро запущен и также быстро остановлен. Для выполнения этих действий требуется минимальное время.
• Обладает высокой надежностью. Стабильная работа при высоких нагрузках.
Стабильная работа при высоких нагрузках.
• Нет необходимости в датчиках или других элементах, обеспечивающих обратную связь. Позиционирование полностью определяется поступающими импульсами.
• Большой диапазон скоростей, в том числе возможность достижения низких скоростей.
• Доступная цена.
• Простота в установке и использовании.
Подключение шагового двигателя к печатным платам Arduino
Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике. Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два – к другой.
Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один – к ее середине. Эти провода подключаются к заземлению.
В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент. Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода.
При этом для контроллера не имеет значение, какой способ подключения выбран. В обоих случаях управление производится через два выхода для каждой обмотки.
Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент.
Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
Питание шагового двигателя
Рекомендуется использовать внешний источник питания 5-12 В, в противном случае ресурсов платы Arduino может оказаться недостаточно.
Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем
Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя. Библиотека Stepper подключается командой #include.
Библиотека Stepper подключается командой #include.
Библиотека Accel Stepper обладает большими возможностями. Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления. А главное она позволяет добиться плавной работы мотора.
После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки. Для этого необходимо задать количество шагов для одного оборота вала.
Драйвер
Также для управления шаговым двигателем используется драйвер. Драйвер позволяет управлять мощными двигателями, ток на которые соответственно поступает с внешнего источника питания.
Импульсы, поступающие на двигатель, формирует микроконтроллер. Для усиления этих импульсов и используется драйвер.
Функции драйвера
Прежде всего, драйвер нужен, чтобы обеспечить поступление тока на обмотки статора. Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
На сегодняшний день существует большой выбор драйверов для шаговых двигателей, например, L293, ULN2003, A3967SLB и многие другие.
Возможные сложности
Перегрев шагового двигателя. Рабочая температура двигателя может достигать 80°C, но это еще не означает, что двигатель перегревается. Если температура мотора превышает 80°C, то только тогда можно говорить о перегреве. В случае перегрева первым делом нужно проверить, какой рабочий ток выставлен на драйвере, соответствует ли он номинальному току двигателя. Можно снизить питающее напряжение, но это приведет к снижению крутящего момента, и соответственно скажется на работе двигателя. В крайнем случае, на корпус двигателя можно установить радиатор и/или вентилятор.
Пропуск шагов. Это достаточно распространенная неприятность, связанная с работой шаговых двигателей. Причины могут быть разные. Вот некоторые из них.
Причины могут быть разные. Вот некоторые из них.
• Некачественный драйвер. Если драйвер неоригинальный, то он не всегда может справиться с непростым управлением шаговым двигателем.
• Ошибки в настройке драйвера. Например, ошибочно выставленное напряжение.
• Перегрузка двигателя. В этом случае нужно проверить, действительно ли двигатель подходит для тех целей, в которых он используется. Вероятно, нужно снизить скорость двигателя или использовать более габаритную модель.
Выбор шагового двигателя
К основным параметрам, по которым производится выбор двигателя, относятся: производитель, габариты двигателя, тип двигателя, ток фазы и индуктивность. Как правило, лучше работают двигатели с меньшей индуктивностью.
Заключение
Шаговые двигатели – эффективное решение, если нужно достичь точного перемещения в пространстве. Они представляют собой бюджетную альтернативу сервоприводу. Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Управление шаговым двигателем | Все о шаговых двигателях
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Шаг во времени, шаг во времени
Давай, друзья, шаг во времени
Шаг во времени
Шаг во времени, шаг во времени
Шаг во времени, шаг во времени
2 Никогда не нужна причина, никогда не нужна рифма
Мы шагаем во времени, мы шагаем во времени
«Шаг во времени»
Роберт Б. Шерман и Ричард М. Шерман
Управление шаговым двигателем немного сложнее управления обычным щеточным двигателем постоянного тока. Шаговым двигателям требуется шаговый контроллер для включения фаз в своевременной последовательности, чтобы двигатель вращался.
Шаговым двигателям требуется шаговый контроллер для включения фаз в своевременной последовательности, чтобы двигатель вращался.
Простейший тип драйвера можно собрать из нескольких транзисторов. Они просто последовательно включаются и выключаются, чтобы подавать питание на фазы и двигать двигатель. Униполярные драйверы относительно недороги в изготовлении, но работают только с униполярными двигателями. На сайте Arduino есть отличное руководство по его сборке.
Учебное пособие по униполярному шаговому приводу
Для управления биполярным двигателем требуется 2 полных Н-моста, чтобы он мог реверсировать ток в фазах. Н-мосты сложно построить с нуля. Но для упрощения задачи доступно множество чипов H-bridge.
L293D — один из самых популярных и экономичных чипов. Их можно найти в основе большинства моторных щитов первого поколения, в том числе невероятно популярного V1 Adafruit Motor Shield.
Есть отличный туториал по использованию голого L293D с Arduino в системе обучения Adafruit:
Урок 16 — Шаговые двигатели
Adafruit Motor Shield V2 — это большой шаг вперед по сравнению с базовыми контроллерами на базе L293D. Экран V2 использует два драйвера MOSFET TB6612. По сравнению с L293D, TB6612 обеспечивает удвоенную пропускную способность по току и значительно меньшее падение напряжения, что позволяет более эффективно управлять шаговыми двигателями.
Всего с 2 микросхемами драйверов и 4 полными H-мостами каждый шилд может управлять двумя шаговыми двигателями. Чипы драйверов взаимодействуют через специальный чип драйвера ШИМ с интерфейсом I2C. Это освобождает множество контактов GPIO для других целей, а также делает экран штабелируемым. Вы можете сложить до 32 из них для управления 64 двигателями всего с 2 контактами ввода-вывода!
Информацию об этом гонщике можно найти в системе обучения.
Направляющая Adafruit Motor Shield V2
Платы контроллеров ЧПУ gShield и TinyG делают вас на шаг ближе к шаговым двигателям промышленного уровня.