Какова ЭДС источника, если при измерении напряжения на его зажимах вольтметром
Условие задачи:
Какова ЭДС источника, если при измерении напряжения на его зажимах вольтметром с внутренним сопротивлением 20 Ом мы получаем напряжение 1,37 В, а при замыкании источника на сопротивление 10 Ом получаем ток 0,132 А?
Задача №7.2.24 из «Сборника задач для подготовки к вступительным экзаменам по физике УГНТУ»
Дано:
\(R_v=20\) Ом, \(U=1,37\) В, \(R=10\) Ом, \(I_2=0,132\) А, \(\rm E-?\)
Решение задачи:
Напряжение, которое покажет вольтметр, можно рассчитать по такой формуле:
\[U = {I_1}{R_v}\;\;\;\;(1)\]
Ток \(I_1\), текущий через вольтметр, можно найти по закону Ома для полной цепи:
\[{I_1} = \frac{{\rm E}}{{{R_v} + r}}\]
Тогда формула (1) примет такой вид:
\[U = \frac{{{\rm E}{R_v}}}{{{R_v} + r}}\]
Выразим ЭДС:
\[{\rm E} = \frac{{U\left( {{R_v} + r} \right)}}{{{R_v}}}\;\;\;\;(2)\]
\[{\rm E} = U\left( {1 + \frac{r}{{{R_v}}}} \right)\;\;\;\;(3)\]
Ток \(I_2\), текущий через сопротивление \(R\), также определим по закону Ома для полной цепи:
\[{I_2} = \frac{{\rm E}}{{R + r}}\]
Откуда ЭДС:
\[{\rm E} = {I_2}\left( {R + r} \right)\;\;\;\;(4)\]
Приравняем (2) и (4), получим такое равенство:
\[U\frac{{{R_v} + r}}{{{R_v}}} = {I_2}\left( {R + r} \right)\]
\[U\left( {{R_v} + r} \right) = {I_2}{R_v}\left( {R + r} \right)\]
Раскроем скобки в обеих частях равенства, все члены с неизвестным \(r\) перенесем в правую часть, остальные – в левую, далее вынесем неизвестное внутреннее сопротивление \(r\) за скобки и выразим его:
\[U{R_v} + Ur = {I_2}{R_v}R + {I_2}{R_v}r\]
\[U{R_v} – {I_2}{R_v}R = {I_2}{R_v}r – Ur\]
\[r\left( {{I_2}{R_v} – U} \right) = {R_v}\left( {U – {I_2}R} \right)\]
\[r = \frac{{{R_v}\left( {U – {I_2}R} \right)}}{{{I_2}{R_v} – U}}\]
Отлично, мы выразили неизвестное внутреннее сопротивление \(r\) через известные величины, осталось только полученное выражение подставить в формулу (3), чтобы получить решение задачи в общем виде. Получим:
Получим:
\[{\rm E} = U\left( {1 + \frac{{U – {I_2}R}}{{{I_2}{R_v} – U}}} \right)\]
Приведем в скобках под общий знаменатель:
\[{\rm E} = U\frac{{{I_2}{R_v} – U + U – {I_2}R}}{{{I_2}{R_v} – U}}\]
\[{\rm E} = U\frac{{{I_2}{R_v} – {I_2}R}}{{{I_2}{R_v} – U}}\]
\[{\rm E} = \frac{{U{I_2}\left( {{R_v} – R} \right)}}{{{I_2}{R_v} – U}}\]
Подставим данные в полученную формулу и посчитаем ответ:
\[{\rm E} = \frac{{1,37 \cdot 0,132 \cdot \left( {20 – 10} \right)}}{{0,132 \cdot 20 – 1,37}} = 1,424\;В = 1424\;мВ\]
Ответ: 1424 мВ.
Если Вы не поняли решение и у Вас есть какой-то вопрос или Вы нашли ошибку, то смело оставляйте ниже комментарий.
Смотрите также задачи:
7.2.23 Щелочной аккумулятор создает силу тока 0,8 А, если его замкнуть на сопротивление 1,5 Ом
7.2.25 Два источника тока с ЭДС 2 и 1,2 В, внутренними сопротивлениями 0,5 и 1,5 Ом соответственно
7.2.26 Аккумулятор подключен для зарядки к сети с напряжением 12,5 В. Внутреннее сопротивление
Внутреннее сопротивление
Ответы | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||
 03.17
03.17
|
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||
Посмотреть всех экспертов из раздела Учеба и наука > Физика
| Похожие вопросы |
Решено
К зажимам генератора постоянного тока с ЭДС 200 В и внутренним сопротивление 0,6 Ом подключен потребитель сопротивлением 14 Ом.
Задача по физике (статика). Рымкевич 1984 год
Тип соединения конденсаторов
Решено
Простая задача по физикеПоверхность изделия с площадью 1 см2 покрыли одноатомным слоем золота. Считая, что атомы золота образовали квадратную решетку с расстояниями между центрами 2,9.10–10 м, определить, на сколько возросла
Пользуйтесь нашим приложением— Почему присутствует ЭДС, когда нет тока?
спросил
Изменено 1 год, 7 месяцев назад
Просмотрено 626 раз
\$\начало группы\$Ток означает скорость потока заряда. Электроны — это те, которые несут заряд в токе. Из определения ЭДС (электродвижущая сила),
Когда ток из ячейки не поступает, разность потенциалов между выводами ячейки называется: ЭДС ячейки.

ЭДС – разность потенциалов ячейки. Итак, разность потенциалов — это работа, совершаемая при переносе единичного заряда из одной точки в другую. Следовательно, если тока нет, ничто не несет заряда. Следовательно, ЭДС тоже 0?
- напряжение
- ток
Ток — это поток заряда. Напряжение – это потенциальная энергия на единицу заряда.
Заряд в ячейке есть, но не течет. Потенциальное напряжение ЭДС уже есть, оно только и ждет, чтобы его использовали.
\$\конечная группа\$ \$\начало группы\$ЭДС или напряжение определяется как потенциальная энергия на единицу заряда или на 1 кулон заряда. Даже если нет тока, потенциал на единицу заряда все равно есть. Как только путь будет найден, этот потенциал вызовет ток.
Если вы держите камень в руке, он может двигаться к земле.
Из определения ЭДС (электродвижущая сила),
Когда ток из ячейки не поступает, разность потенциалов между выводами ячейки называется: ЭДС ячейки.
Вы процитировали это «определение» из картинки, которую вы процитировали в чате:
Это утверждение — Когда ток не поступает из ячейки, разность потенциалов между выводами ячейки называется: ЭДС ячейки. — не является определением ЭДС. Это заявление о том, какова разность потенциалов (pd или то, что мы обычно называем напряжением) между выводами ячейки при отсутствии тока нагрузки. При отсутствии нагрузки на ячейку pd на клеммах = ЭДС ячейки.
Википедия дает краткое определение ЭДС как «электрическое действие, производимое неэлектрическим источником». Я бы предпочел заменить «электрическое действие» на «источник напряжения».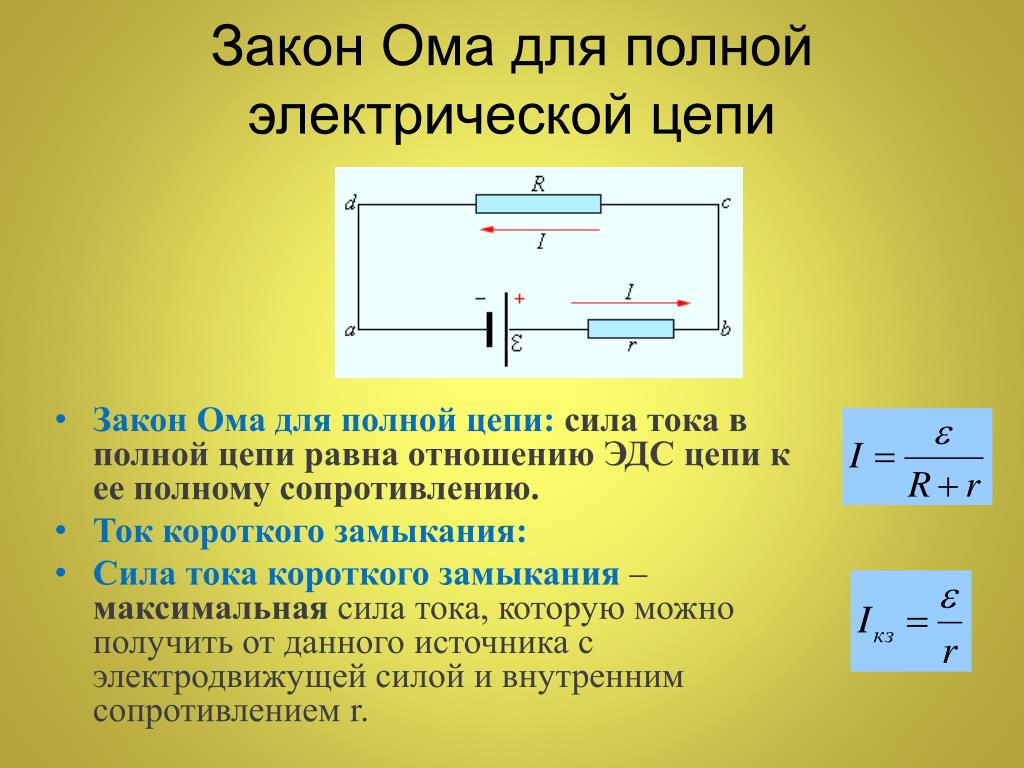 Неэлектрический источник может быть химическим, например гальваническим элементом, вызванным переменным магнитным полем, например, в катушке индуктивности, трансформаторе, двигателе или генераторе, или в приемной радиоантенне, или в солнечном элементе, работающем от света. В статье Википедии эти источники рассматриваются более подробно.
Неэлектрический источник может быть химическим, например гальваническим элементом, вызванным переменным магнитным полем, например, в катушке индуктивности, трансформаторе, двигателе или генераторе, или в приемной радиоантенне, или в солнечном элементе, работающем от света. В статье Википедии эти источники рассматриваются более подробно.
Обратите внимание на «неэлектрический источник». Обычно мы не говорим, что цепь питания создает ЭДС, потому что она получает питание от источника электричества.
\$\конечная группа\$Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google Зарегистрироваться через Facebook Зарегистрируйтесь, используя адрес электронной почты и парольОпубликовать как гость
Электронная почтаТребуется, но никогда не отображается
Опубликовать как гость
Электронная почтаТребуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания и подтверждаете, что прочитали и поняли нашу политику конфиденциальности и кодекс поведения.
Описание GB1015224.7 | Current-Drive — естественный способ работы громкоговорителя
КОМПЕНСАЦИЯ ПОВЫШАЮЩЕЙСЯ ЧАСТОТЫ В ПАССИВНЫХ ТОКОВЫХ ГРОМКОГОВОРИТЕЛЯХ(GB2473921) 90 105
Изобретение относится к электродинамическим громкоговорителям с подвижной катушкой. предназначены для использования с усилителями с токовым выходом. Он раскрывает средство для коррекции возрастающей частотной характеристики в свободном поле, которая характерна для громкоговорителей конического типа при токовом возбуждении, поскольку отсутствует фильтрующее действие индуктивности звуковой катушки. Коррекция отклика достигается способом, который сохраняет блок драйвера динамика, по существу, в режиме управления током. Пассивность громкоговорителя означает здесь, что громкоговоритель не содержит функций усилителя.
Предыстория: Качественное превосходство Current-Drive
Сегодня все имеющиеся в продаже звуковые усилители и громкоговорители без существенных исключений работают по принципу привода напряжения. Это означает, что усилитель действует как источник напряжения и, следовательно, имеет небольшое выходное сопротивление. Тем не менее, как технические аспекты, так и опыт прослушивания ясно указывают на то, что привод напряжения является неправильным выбором, если качество звука считается важным. Причина в том, что электродвижущие силы (ЭДС), генерируемые динамиком динамика, нарушают преобразование напряжения в ток, которое в принципе привода напряжения остается работой громкоговорителя.
Это означает, что усилитель действует как источник напряжения и, следовательно, имеет небольшое выходное сопротивление. Тем не менее, как технические аспекты, так и опыт прослушивания ясно указывают на то, что привод напряжения является неправильным выбором, если качество звука считается важным. Причина в том, что электродвижущие силы (ЭДС), генерируемые динамиком динамика, нарушают преобразование напряжения в ток, которое в принципе привода напряжения остается работой громкоговорителя.
Движущая сила ( F ), приводящая в движение диафрагму, пропорциональна току ( i ), протекающему через звуковую катушку по формуле F = Bli , где произведение Bl называется коэффициентом силы ( B = плотность магнитного потока; l = длина провода в магнитном поле). Однако в драйвере, управляемом напряжением, этот ток искажается множеством способов.
Электрическая эквивалентная схема драйвера с подвижной катушкой может быть представлена на рисунке 1. R c представляет собой сопротивление звуковой катушки, источник напряжения e м представляет собой противо-ЭДС (ЭДС движения) драйвера и рассчитывается как 097 в = скорость звуковой катушки), а источник напряжения e i представляет ЭДС индуктивности, которая генерируется индуктивностью звуковой катушки с потерями.
R c представляет собой сопротивление звуковой катушки, источник напряжения e м представляет собой противо-ЭДС (ЭДС движения) драйвера и рассчитывается как 097 в = скорость звуковой катушки), а источник напряжения e i представляет ЭДС индуктивности, которая генерируется индуктивностью звуковой катушки с потерями.
Глядя на кривую импеданса типичного драйвера, легко подумать, что e m имеет значение только вблизи основной резонансной частоты или что e i имеет значение только на самых высоких рабочих частотах. Вместо этого в типичном конусном или купольном динамике сумма величин e m и e i на самом деле по крайней мере того же порядка, что и падение напряжения в R c на всем протяжении. весь рабочий диапазон частот.
Оба e м и e i подвержены нескольким факторам помех, по этой причине эти напряжения не следуют линейно приложенному сигналу, а включают в себя очень разнообразные компоненты искажения. При питании эквивалентной схемы на рис. 1 обычным усилителем с низким выходным сопротивлением, который функционально соответствует источнику напряжения, источникам e m и e i и всем содержащимся в них неопределенным компонентам искажения модулировать напряжение, оставшееся на сопротивлении R c и, следовательно, ток, протекающий в цепи, с последствиями, которые очень пагубно влияют на качество звука во всем мире.
При питании эквивалентной схемы на рис. 1 обычным усилителем с низким выходным сопротивлением, который функционально соответствует источнику напряжения, источникам e m и e i и всем содержащимся в них неопределенным компонентам искажения модулировать напряжение, оставшееся на сопротивлении R c и, следовательно, ток, протекающий в цепи, с последствиями, которые очень пагубно влияют на качество звука во всем мире.
Вместо этого, питая эквивалентную схему на рис. 1 усилителем с высоким выходным импедансом, который функционально соответствует источнику тока, источникам e m и e i , а также компонентам неопределенного искажения, содержащимся тем, что они не могут модулировать ток, протекающий в цепи, который теперь определяется непосредственно источником питающего тока, который без помех следует за приложенным сигналом.
Следующие факторы помех искажают ток звуковой катушки при управлении напряжением, но, естественно, не при управлении током:
1) Звуковая катушка, действующая как микрофон для звуковых волн, отражающихся изнутри корпуса и проходящих через диафрагму
2) Звуковая катушка, действующая как микрофон для звуковых волн от соседних драйверов
3) Механические и пневматические неидеальности движущихся детали, вызывающие неконтролируемые эффекты ЭДС
4) Bl — изменения, вызывающие колебания угла импеданса и, следовательно, фазовую модуляцию тока на средних частотах
5) Зависящая от положения индуктивность звуковой катушки, вызывающая как амплитудную, так и фазовую модуляцию тока
6) Индуктивность звуковой катушки сильно зависит от уровня сигнала, вызывающего негармонические искажения
7) Изменения сопротивления из-за изменений температуры и производственных допусков
8) Программный сигнал -зависимые изменения контактного сопротивления в разъемах и переключателях
Подробная информация об этих серьезных механизмах помех и приводе тока в целом содержится в книге: Эса Мерилинен: Управление током громкоговорителей , CreateSpace 2010, США (ISBN: 1450544002).
Как создается Current-Drive
Совершенно идеальное управление током, как и полностью идеальное управление напряжением, невозможно реализовать, поэтому на практике всегда приходится соглашаться на компромисс, лежащий где-то между этими двумя крайностями . В каком режиме в итоге работает драйвер, определяется соотношением импедансов источника питания и драйвера.
На рис. 2а драйвер питается от источника напряжения ( E ) через последовательное сопротивление ( Z ). Если Z очень мало по отношению к импедансу нагрузки Z L , то ток нагрузки I L определяется почти исключительно Z L , а напряжение нагрузки 90 097 У Л по существу следует за источником питания E ; поэтому драйвер работает, в данном случае, под напряжением привода. (При сравнении импедансов учитывается абсолютное значение, т.е. длина вектора.)
В свою очередь, если Z очень велико по отношению к Z L , Z L составляет лишь очень малую часть полного импеданса цепи. Тогда ток нагрузки I L почти не зависит от Z L и его вариаций, поэтому драйвер работает в режиме токового привода. Высокий последовательный импеданс также требует высокого напряжения источника, если необходимо поддерживать достаточный ток; поэтому на практике реализовать токовый привод по принципу рис. 2а экономически нецелесообразно.
Тогда ток нагрузки I L почти не зависит от Z L и его вариаций, поэтому драйвер работает в режиме токового привода. Высокий последовательный импеданс также требует высокого напряжения источника, если необходимо поддерживать достаточный ток; поэтому на практике реализовать токовый привод по принципу рис. 2а экономически нецелесообразно.
Если Z того же порядка, что и Z L , то можно сказать, что ток определяется пополам обоими импедансами, а вариации Z L отражаются в токе с половинная мощность по сравнению со случаем, когда Z = 0. Тогда рабочий режим можно рассматривать как промежуточный между управлением напряжением и током.
На рис. 2б источник напряжения заменен источником тока, а последовательное сопротивление — параллельным. С точки зрения нагрузки схемы на рисунках 2а и 2б работают совершенно идентично, если I = E / Z . Таким образом, при анализе режима работы драйвера может использоваться любая из двух моделей, в зависимости от необходимости.
Если Z на рис. 2b очень низкое по сравнению с импедансом нагрузки Z L , напряжение U L определяется почти исключительно Z , поскольку ток нагрузки тогда очень низкий. Таким образом, работа драйвера по существу зависит от напряжения. В свою очередь, если Z очень высокое по сравнению с Z L , значение Z оставлено уменьшительным, и драйвер работает, по существу, под токовым приводом.
Таким образом, в обеих моделях высокое значение Z обозначает привод тока, а низкое значение — привод напряжения соответственно. Вместо этого величина источников не имеет отношения к режиму вождения, поэтому их можно даже считать нулевыми. Источник нулевого напряжения соответствует короткому замыканию, а нулевой источник тока, в свою очередь, обрыву; поэтому, независимо от того, какая модель используется, импеданс, видимый водителем, то есть импеданс, определяющий режим вождения, всегда равен Z (рис. 2в).
2в).
Модели на рис. 2 также могут использоваться для представления сети, состоящей из линейных элементов, а не только в случае одного источника и одного импеданса источника. Любая сеть, состоящая из сопротивлений, емкостей, индуктивностей, источников напряжения и тока, всегда может быть заменена между любыми двумя узлами последовательным соединением одного источника напряжения и одного импеданса, называемого Твенинским эквивалентом сети. Вместо этого можно также использовать параллельное соединение источника тока и импеданса (или полной проводимости), называемое эквивалентом Нортона.
Чтобы поддерживать высокий уровень Z , помимо усилителя, возможный кроссоверный фильтр должен быть рассчитан на высокое сопротивление, поэтому в основном подходят фильтры 1-го порядка. (Следует признать, что полностью соответствующие ограничения применялись бы и к традиционным системам привода напряжения, если бы в них соответственно придерживались требования низкого импеданса, воспринимаемого драйвером. Однако на практике этот вопрос просто не заботится; и поэтому фактический режим работы драйверов часто находится где-то посередине между управлением по напряжению и по току, однако, как правило, ближе к управлению по напряжению.)
Однако на практике этот вопрос просто не заботится; и поэтому фактический режим работы драйверов часто находится где-то посередине между управлением по напряжению и по току, однако, как правило, ближе к управлению по напряжению.)
Токи, производные от ЭМП
С точки зрения качества звука наиболее важным фактором является то, насколько велики составляющие тока, генерируемые в звуковой катушке электродвижущими силами, содержащими помехи e m и e i по сравнению с сигнальным током, протекающим в звуковой катушке без этих сил. На практике величина ЭДС движения, e m , не может быть уменьшена без снижения чувствительности водителя. ЭДС индуктивности может быть уменьшена до некоторой степени конструкцией магнитной цепи и закорачивающими кольцами, но не окончательно. Таким образом, единственным рабочим средством для устранения или сведения к минимуму протекания этих вредных составляющих тока является изменение электрического импеданса, воспринимаемого блоком драйвера, обозначенного цифрой 9. 0097 Z на рис. 2в, сделан максимально высоким.
0097 Z на рис. 2в, сделан максимально высоким.
Чтобы разобраться в этом вопросе, можно представить как бы источник постороннего напряжения, включенный последовательно с блоком драйвера, как на рис. 1, а затем изучить, какой относительный ток этот источник вносит в звуковую катушку драйвера в Вопрос и в звуковых катушках возможных других драйверов, работающих в той же схеме.
Common Beliefs
Внедрению привода тока, возможно, помешало предубеждение, согласно которому фундаментальный резонанс басового драйвера не может быть легко демпфирован, поскольку отсутствует так называемое электрическое демпфирование, относящееся к приводу напряжения. . Однако необходимое демпфирование резонанса достигается за счет использования драйвера с низким механическим сопротивлением 9.0097 Q , заполнив корпус эффективным демпфирующим материалом и используя соответствующую активную или пассивную аттенюаторную сеть, с помощью которой можно точно настроить басовый отклик на месте.
Согласно широко распространенному, но плохо обоснованному мнению, выходное сопротивление усилителя должно быть как можно меньше, чтобы «управлять» движением диффузора и как-то подавлять ЭДС, генерируемые драйвером. Физический факт состоит в том, что движением конуса (точнее, ускорением) можно управлять только током, а сами ЭДС никогда нельзя подавить без подавления всего динамика; просто потому что закон e m = Blv никогда не перестанет удерживаться, независимо от того, какие импедансы или цепи используются. Вместо этого вредные токи , производные от ЭДС, могут и должны подавляться, а это достигается только тщательно продуманной конструкцией привода тока.
Описание проблемы
Токовый привод требует, таким образом, чтобы выходное сопротивление усилителя было высоким по сравнению с сопротивлением блока драйвера. Однако остальная часть схемы, в том числе кроссоверная сеть, не должна нарушать принцип управления током, снижая общий (Твенинский) импеданс, воспринимаемый драйвером. Следовательно, простые параллельно соединенные RC-цепи нельзя использовать для коррекции отклика, поскольку это смещает режим работы в некую золотую середину между возбуждением по напряжению и по току.
Следовательно, простые параллельно соединенные RC-цепи нельзя использовать для коррекции отклика, поскольку это смещает режим работы в некую золотую середину между возбуждением по напряжению и по току.
С другой стороны, типичный громкоговоритель конического типа с токовым приводом нуждается в затухании на высоких частотах, потому что на коротких длинах волн конус действует как рупор для вибраций, исходящих от центра, а индуктивность звуковой катушки не вызывает фильтрацию нижних частот, поскольку происходит при обычном использовании. Еще одна причина, вызывающая рост частотной характеристики, — направленность передней панели корпуса («ступенька перегородки»). На коротких волнах излучение происходит именно в полупространство и поэтому более эффективно, чем на длинных волнах, где звук исходит из динамика во всех направлениях.
Общая схема изобретения
В настоящем изобретении описывается средство для коррекции восходящей частотной характеристики громкоговорителя, управляемого током, по схеме, показанной на рис. 3. Драйвер 2 громкоговорителя с двойной звуковой катушкой подключен к делителю тока. сеть 3, которая позволяет обеим звуковым катушкам (4a, 4b) нормально работать на низких частотах, но полностью или частично отключает одну из катушек на высоких частотах, при этом другая катушка все еще полностью или частично работоспособна.
3. Драйвер 2 громкоговорителя с двойной звуковой катушкой подключен к делителю тока. сеть 3, которая позволяет обеим звуковым катушкам (4a, 4b) нормально работать на низких частотах, но полностью или частично отключает одну из катушек на высоких частотах, при этом другая катушка все еще полностью или частично работоспособна.
Под «низкими частотами» подразумеваются достаточно низкие частоты (обычно ниже 100 Гц), при которых потребность в затухании из-за вышеописанных причин в возбудителе 2 по существу незначительна. Под «высокими частотами» подразумеваются частоты, достаточно высокие (обычно несколько килогерц), чтобы по существу было достигнуто полное необходимое затухание.
Подробное описание изобретения
На фиг.3 представлена общая схема изобретения.
На рис. 4 показан простой вариант осуществления изобретения с ослаблением на 6 дБ.
На рис. 5 показан вариант осуществления изобретения для затухания более 6 дБ.
На рис. 6 для сравнения показан альтернативный, но менее совершенный способ ослабления высоких частот с использованием обычного драйвера.
На рисунках 7 и 8 показаны рабочие характеристики, полученные схемами на рисунках 4 и 5.
На рис. 4 показан простой вариант осуществления изобретения. Звуковые катушки 4а и 4b соединены последовательно, а катушка индуктивности 5, конденсатор 6 и резистор 7 вместе составляют схему делителя тока. На низких частотах практически весь ток, который подается через точки 8 и 9течет через индуктор 5 и звуковые катушки 4a и 4b. Ток через конденсатор 6 в этом случае пренебрежимо мал, и динамик работает на полном приводе. На высоких частотах практически весь ток протекает через конденсатор 6, резистор 7 и звуковую катушку 4b, минуя звуковую катушку 4а. Предполагая, что звуковые катушки идентичны, уровень звука снижается на 6 дБ. На промежуточных частотах (в переходной области) ток через звуковую катушку 4а постепенно уменьшается с увеличением частоты, и желаемые характеристики компенсации могут быть достигнуты за счет оптимизации индуктивности 5 и емкости 6. Если желаемое затухание меньше 6 дБ, можно использовать резистор. добавить параллельно катушке индуктивности 5.
добавить параллельно катушке индуктивности 5.
Резистор 7 увеличивает импеданс звуковой катушки 4a на частоте, где индуктивность 5 и емкость 6 компенсируют друг друга, и, таким образом, помогает удерживать звуковую катушку 4a в режиме управления током. Увеличение сопротивления 7 также увеличивает общий импеданс между точками 8 и 9 на высоких частотах, поэтому сопротивление 7 следует выбирать таким образом, чтобы не превышался максимально допустимый общий импеданс.
На рис. 4 импеданс звуковой катушки 4b бесконечен, поэтому эта катушка без компромиссов работает от тока на всех частотах. Полное сопротивление звуковой катушки 4а представляет собой полное сопротивление последовательного соединения индуктивности 5, емкости 6 и сопротивления 7 и может быть достаточно высоким как на низких, так и на высоких частотах. Если сопротивление 7, например. в три раза больше номинального импеданса звуковой катушки 4а, импеданс указанного последовательного соединения остается достаточно высоким даже на тех частотах, где импедансы катушки индуктивности 5 и конденсатора 6 относительно низкие.
Важно, чтобы импеданс звуковой катушки 4a был высоким даже на высоких частотах, несмотря на то, что катушка не пропускает сигнальный ток в этой области. Это связано с тем, что электродвижущие силы, возникающие в результате взаимной индуктивности и движения катушки, все еще присутствуют и не должны создавать нежелательные токи в контуре, содержащем звуковую катушку 4а.
Затухания в 6 дБ, достигнутого с помощью схемы, показанной на рис. 4, часто бывает достаточно для малогабаритных конических динамиков. Однако в больших громкоговорителях осевая чувствительность имеет тенденцию возрастать с частотой более круто, и, следовательно, может потребоваться дополнительная компенсация. Решение показано на рис. 5. Резистор 10 и конденсатор 11 образуют новый путь тока, вдоль которого часть тока сигнала обходит также и на высоких частотах звуковую катушку 4b, создавая тем самым необходимое дополнительное затухание. При значениях сопротивления, показанных на рис. 5, общее затухание на высоких частотах составит 10 дБ (без учета индуктивности звуковой катушки 4b). Желаемые общие компенсационные характеристики могут быть реализованы путем оптимизации сопротивления 10 и емкости 11 вместе с индуктивностью 5 и емкостью 6, т.е. с помощью программы моделирования цепи.
Желаемые общие компенсационные характеристики могут быть реализованы путем оптимизации сопротивления 10 и емкости 11 вместе с индуктивностью 5 и емкостью 6, т.е. с помощью программы моделирования цепи.
Включение резистора 10 и конденсатора 11 мало влияет на импеданс, воспринимаемый звуковой катушкой 4а, а импеданс, воспринимаемый звуковой катушкой 4b, остается довольно высоким даже на высоких частотах, поскольку сумма сопротивлений 7 и 10 на практике во много раз больше чем номинальный импеданс звуковой катушки 4b.
Если в системе не используется какой-либо твитер, может потребоваться расширение полосы пропускания за счет уменьшения затухания на самых высоких частотах. Это можно сделать благоприятно, например. путем включения параллельной резонансной цепи, состоящей из катушки индуктивности и конденсатора, последовательно с резистором 10, и путем установки пика импеданса указанной резонансной цепи на самые высокие частоты, которые необходимо воспроизвести. В то же время емкость 11 может быть существенно уменьшена. Одним замечательным преимуществом токового привода является также то, что, поскольку затухание, вносимое индуктивностью звуковой катушки, отсутствует, становится возможным использовать одностороннюю систему во многих таких приложениях, где обычно требуется помощь твитера.
Одним замечательным преимуществом токового привода является также то, что, поскольку затухание, вносимое индуктивностью звуковой катушки, отсутствует, становится возможным использовать одностороннюю систему во многих таких приложениях, где обычно требуется помощь твитера.
На рисунках 4 и 5 в скобках показаны примерные значения для компонентов схемы с учетом звуковых катушек 4 Ом. На рис. 7 показаны характеристики затухания (векторная сумма токов звуковой катушки), полученные с использованием этих значений; сплошная линия представляет схему рис. 4, а пунктирная линия соответственно схему рис. 5. На рис. 8 показано, соответственно, полное сопротивление между точками 8 и 9.
Предпочтительно конденсаторы должны быть из пластикового диэлектрика, но можно использовать биполярные электролиты, если важна только стоимость. Индуктор 5 еще не слишком велик, чтобы его можно было использовать с воздушным сердечником. В окончательном проекте должны быть учтены собственная индуктивность каждой звуковой катушки с потерями и взаимная индуктивность между ними, которые должны быть смоделированы с помощью соответствующих эквивалентных схем.
На рис. 6 показан альтернативный, но менее идеальный метод ослабления высоких частот в громкоговорителях, управляемых током. Здесь обычный драйвер с одной звуковой катушкой питается с помощью схемы RCL, которую можно настроить для реализации почти такой же функции фильтрации, что и схемы на рисунках 4 и 5.
Для сравнения предположим, что на рисунках 4 и 6 используется один и тот же драйвер (звуковые катушки последовательно). Тогда для данного уровня звука электродвижущие силы, индуцируемые в звуковой катушке 4а на рис. 4, составляют половину силы, индуцируемой в динамике на рис. 6. Кроме того, коэффициент силы катушки 4а составляет половину коэффициента силы на рис. 6. Следовательно, для данного уровня звуковых эффектов, вызванных ЭДС, генерируемые ЭДС токи, проходящие через катушку 4а на рис.4, должны быть в 2 раза больше, чем токи ЭДС, проходящие через драйвер на рис.6. импеданс, воспринимаемый звуковой катушкой 4a на рис. 4, может быть меньше 1/4 от импеданса, видимого драйвером на рис. 6, для сохранения того же качества звука. На практике этого преимущества достаточно, чтобы сделать метод с двумя катушками более идеальным по производительности по сравнению с альтернативой с одной катушкой.
6, для сохранения того же качества звука. На практике этого преимущества достаточно, чтобы сделать метод с двумя катушками более идеальным по производительности по сравнению с альтернативой с одной катушкой.
Превосходство метода двойной катушки особенно очевидно на высоких частотах. При приведенных примерных значениях импеданс, воспринимаемый звуковой катушкой 4а, увеличивается почти прямо пропорционально частоте уже примерно с 1 кГц, тогда как на рис. 6 импеданс, воспринимаемый драйвером, выравнивается на высоких частотах до суммы сопротивлений R 1 и R 2 .
Дополнения и пояснения
Звуковые катушки 4a и 4b необязательно должны быть идентичными. Делая число витков катушек разным, можно установить разные коэффициенты затухания. Однако это не обязательно очень практично. Звуковые катушки также можно соединить последовательно уже во внутренней конструкции драйвера, сэкономив тем самым один отходящий провод. Вместо одного можно использовать несколько драйверов с двойной звуковой катушкой. Звуковая катушка 4а может быть последовательной или параллельной комбинацией первых катушек от нескольких двойных драйверов звуковой катушки, а звуковая катушка 4b может быть комбинацией вторых катушек тех же драйверов.
Звуковая катушка 4а может быть последовательной или параллельной комбинацией первых катушек от нескольких двойных драйверов звуковой катушки, а звуковая катушка 4b может быть комбинацией вторых катушек тех же драйверов.
Параллельное соединение звуковых катушек также может быть использовано на токовом приводе при условии, что драйверы аналогичны. Когда возмущающая ЭДС появляется в одной из параллельно соединенных катушек, ток возмущения, создаваемый ЭДС, течет в противоположном направлении в другой звуковой катушке, и поэтому слышимые эффекты, создаваемые ЭДС, в значительной степени компенсируются, даже если истинный импеданс, видимый каждая звуковая катушка остается относительно низкой.
Сеть 3 делителя тока может также включать драйверы для других частотных диапазонов и схемы кроссоверных фильтров для создания многоканальной системы. Однако принцип высокого импеданса источника ограничивает предпочтительные конструкции кроссовера в основном фильтрами 1-го порядка. (Соответствующее ограничение также применимо к системам, управляемым напряжением, если нужно минимизировать импеданс источника.