Бесщеточные двигатели — Бесщеточные двигатели постоянного тока и их преимущества.
Любой специалист по механике должен понимать разницу между щеточными и бесщеточными двигателями постоянного тока. Щеточные двигатели когда-то были очень распространены. На самом деле, они все еще существуют в наши дни, хотя их в значительной степени заменяют их бесщеточные аналоги, правильный тип постоянного тока любого типа может сделать проект или домашний электроинструмент намного более эффективным. Что ж, давайте познакомимся с различными типами двигателей
1 🔰 Что такое двигатель постоянного тока?
2 🔰 Щеточные и бесщеточные двигатели: Почему дополнительные расходы?
3 🔰 Где используются щеточные и бесщеточные двигатели
4 🔰 Щеточный или бесщеточный?
Вот уже несколько лет мы наблюдаем, как бесщеточные двигатели начинают доминировать в производстве профессиональных инструментов для аккумуляторных инструментов.
Любой специалист по механике должен понимать разницу между щеточными и бесщеточными двигателями постоянного тока. Щеточные двигатели когда-то были очень распространены. На самом деле, они все еще существуют в наши дни, хотя их в значительной степени заменяют их бесщеточные аналоги, правильный тип постоянного тока любого типа может сделать проект или домашний электроинструмент намного более эффективным.
Двигатель постоянного тока🔰 Что такое двигатель постоянного тока?
двигатель постоянного тока — одна из самых фундаментальных машин за последние 200 лет. Этот электродвигатель использует постоянный ток для создания вращательного движения и позволил разработчикам создавать электроинструменты, мобильное оборудование, компьютерные компоненты и другие бесценные приложения на батарейках. Они представляют собой класс, отличный от двигателей переменного тока, которые столь же продуктивны, но обеспечивают различные преимущества. Класс двигателей постоянного тока в целом разделен на двигатели постоянного тока с щеткой и бесщеточные двигатели постоянного тока, и эта статья поможет тем, кто хочет понять, что отличает один двигатель постоянного тока от другого. Основные принципы, лежащие в основе обоих типов двигателей постоянного тока, будут объяснены, а затем сравнены, чтобы показать, где каждая машина работает лучше всего в промышленности.
Они представляют собой класс, отличный от двигателей переменного тока, которые столь же продуктивны, но обеспечивают различные преимущества. Класс двигателей постоянного тока в целом разделен на двигатели постоянного тока с щеткой и бесщеточные двигатели постоянного тока, и эта статья поможет тем, кто хочет понять, что отличает один двигатель постоянного тока от другого. Основные принципы, лежащие в основе обоих типов двигателей постоянного тока, будут объяснены, а затем сравнены, чтобы показать, где каждая машина работает лучше всего в промышленности.
🔸 Щеточные Двигатели
Почищенные Щеткой Двигатели постоянного тока (часто называемые просто “щеточными двигателями”) являются одними из старейших электродвигателей и используют постоянный ток с механической коммутацией для выработки механической энергии.
Эти двигатели, как следует из их названия, используют щетки для подключения источника постоянного тока к роторному узлу, который является компонентом двигателя, содержащим якорь, коллекторные кольца и выходной вал. Статор или внешний корпус двигателя содержит поле постоянного магнита, создаваемое либо постоянным магнитом, либо какой-либо неподвижной катушкой электромагнита. Постоянное магнитное поле имеет полюса (магнитные пары север — юг), и их линии магнитного поля непрерывно проходят через весь узел ротора. Этот узел питается, когда щетки зажимают кольца коллектора, который направляет ток через якорь и его обмотки. Когда ток проходит через эти катушки, якорь становится собственным электромагнитом и взаимодействует с постоянными полюсами поля статора. Поскольку узел ротора может свободно вращаться, создаваемое якорем поле, следовательно, будет отталкивать поле статора, вызывая вращение вала. Это вращение пропорционально токам возбуждения якоря и статора, и изменение этих токов приведет к различным выходным характеристикам.
Статор или внешний корпус двигателя содержит поле постоянного магнита, создаваемое либо постоянным магнитом, либо какой-либо неподвижной катушкой электромагнита. Постоянное магнитное поле имеет полюса (магнитные пары север — юг), и их линии магнитного поля непрерывно проходят через весь узел ротора. Этот узел питается, когда щетки зажимают кольца коллектора, который направляет ток через якорь и его обмотки. Когда ток проходит через эти катушки, якорь становится собственным электромагнитом и взаимодействует с постоянными полюсами поля статора. Поскольку узел ротора может свободно вращаться, создаваемое якорем поле, следовательно, будет отталкивать поле статора, вызывая вращение вала. Это вращение пропорционально токам возбуждения якоря и статора, и изменение этих токов приведет к различным выходным характеристикам.
❌ Недостатки щеточных двигателей
🔴 Принцип работы бесщеточных двигателей такой же, как у двигателей со щетками (управление переключением с использованием обратной связи по положению внутреннего вала), но их общая конструкция отличается. Конструкция бесщеточных блоков снижает внутреннее сопротивление и помогает рассеивать тепло, выделяемое в катушках статора. Таким образом, эффективность повышается, поскольку тепло катушек может рассеиваться более эффективно благодаря гораздо большему корпусу стационарного двигателя.
Конструкция бесщеточных блоков снижает внутреннее сопротивление и помогает рассеивать тепло, выделяемое в катушках статора. Таким образом, эффективность повышается, поскольку тепло катушек может рассеиваться более эффективно благодаря гораздо большему корпусу стационарного двигателя.
🔴 Хотя щеточные двигатели недороги, надежны и имеют высокий крутящий момент или коэффициент инерции, они также имеют ряд недостатков.
Эти компоненты со временем изнашиваются, образуя пыль. Этот тип двигателя требует регулярного технического обслуживания для очистки или замены щеток.
Они также обладают низкой теплоотдачей из-за ограничений ротора, высокой инерции ротора, низкой максимальной скорости и электромагнитных помех (EMI) из-за образования дуги на щетках.
🔴 В отличие от щеточного двигателя, постоянный магнит на бесщеточном блоке установлен на роторе. Статор выполнен из рифленой прокатанной стали и содержит обмотки катушки. С другой стороны, щеточные устройства требуют небольшого количества внешних компонентов или вообще не требуют их, и поэтому хорошо работают в ограничительных условиях.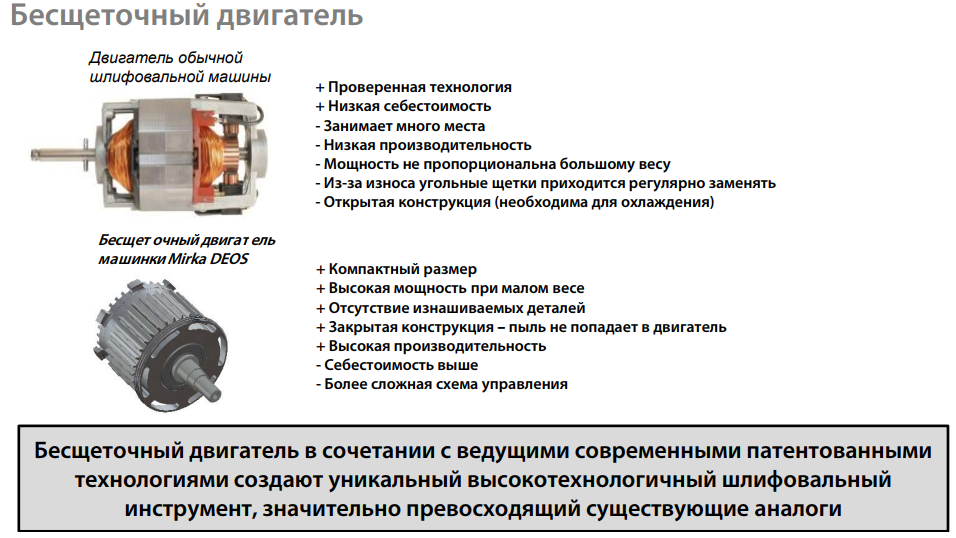
✔️ Плюсы щеточных двигателей
🟢 Щеточные двигатели также легко настраиваются. Вы можете изменить их, чтобы получить точную скорость, которую вы хотите, с помощью используемого напряжения.
🟢 По сравнению с бесщеточными двигателями, щеточный двигатель отлично подходит для начинающих, так как их цены значительно более доступны.
🔸 Бесщеточные двигатели
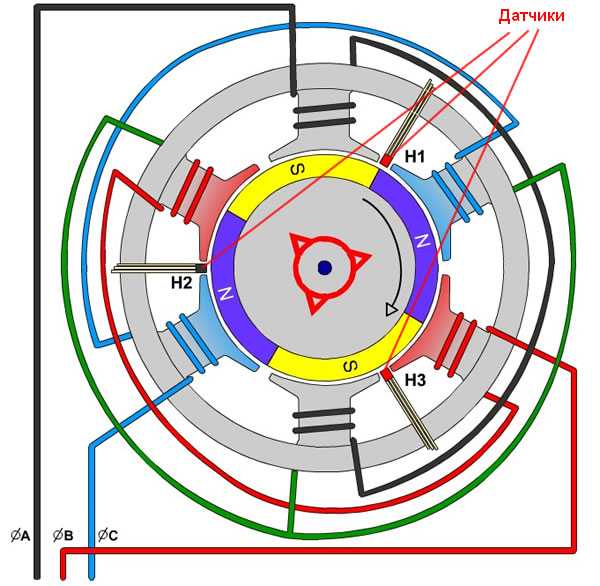
Бесщеточный двигатель использует постоянный магнит в качестве ротора. Он использует трехфазные приводные катушки и специализированный датчик, который отслеживает положение ротора. И когда датчик отслеживает положение ротора, он посылает опорные сигналы контроллеру. Контроллер, в свою очередь, активирует катушки упорядоченным образом – по одной фазе за раз. Главное отличие состоит в том, что здесь нет коммутатора и – что удивительно – нет щеток. Вместо этого бесщеточный двигатель имеет ротор, прикрепленный неодимовыми магнитами, и стальной корпус с обмотками и набором подшипников. Датчики встроены для изменения выходного сигнала – правильно установленный он будет поддерживать высокую точность и производительность нашего устройства.
Датчики встроены для изменения выходного сигнала – правильно установленный он будет поддерживать высокую точность и производительность нашего устройства.
❌ Недостатки бесщеточных двигателей
Как и во всех других устройствах, бесщеточные двигатели постоянного тока также имеют несколько недостатков по сравнению с другими двигателями. Поскольку бесщеточный двигатель постоянного тока во многих случаях превосходит щеточный двигатель постоянного тока, однако бесщеточный двигатель постоянного тока также имеет несколько недостатков, которые
обсуждаются ниже:
🔴 Стоимость бесщеточного двигателя постоянного тока сравнительно выше по сравнению с щеточным двигателем постоянного тока, а электронный контроллер также увеличивает стоимость общей настройки, так как в традиционном двигателе используется недорогая механическая коммутационная установка с использованием щеток.
🔴 Когда бесщеточный двигатель постоянного тока работает на низкой скорости, во время вращения на низкой скорости возникают небольшие вибрации. Однако вибрации уменьшаются на высокой скорости.
Однако вибрации уменьшаются на высокой скорости.
🔴 Короче говоря, бесщеточный двигатель постоянного тока имеет много преимуществ перед традиционными щеточными двигателями постоянного тока, такими как низкие затраты на техническое обслуживание и менее частые требования к техническому обслуживанию. Они также
✔️ Плюсы бесщеточных двигателей
🟢 Бесщеточные двигатели быстро не изнашиваются, и они прослужат долго, часто дольше, чем другие части радиоуправляемого автомобиля. У них нет щеток внутри, и именно поэтому они имеют гораздо больший срок службы. Кроме того, поскольку у них нет щеток, бесщеточный двигатель потребует меньшего обслуживания, будет иметь меньше проблем и в долгосрочной перспективе обойдется вам дешевле.
🟢 В бесщеточном двигателе нет щеток для чистки или замены, поэтому вам нужно только поддерживать подшипник, который нуждается в периодической смазке для контроля.
🟢 Бесщеточные двигатели часто могут работать в течение пяти-шести лет без каких-либо проблем! Это намного больше, чем вы могли бы ожидать от щеточного двигателя. Вес и размеры двигателя относительно меньше и легче
Вес и размеры двигателя относительно меньше и легче
. Это не является бременем для вашего автомобиля, поэтому оно также может значительно повысить вашу скорость и управляемость.
🔰 Щеточные и бесщеточные двигатели: Почему дополнительные расходы?
Благодаря бесщеточной технологии ротор состоит из магнитов и статора катушек, которые попеременно заряжаются положительно или отрицательно.Таким образом, полюса притягиваются и отталкиваются, позволяя двигателю вращаться. Преимущество заключается в том, что между ротором и статором отсутствует физический контакт. Энергия передается от одного к другому через магнетизм между электромагнитами.
В обычном электродвигателе ротор (вращающаяся часть машины) приводится в движение внутри статора (неподвижная часть). Оба соединены электрическим соединением: коллектором или коллектором, который контактирует с небольшими угольными щетками.
Приводимый в действие постоянным током, двигатель работает с переменным током, вырабатываемым электронной картой, которая преобразует постоянный ток в трехфазную переменную частоту.
Таким образом, катушки подаются попеременно для создания вращающегося поля и, следовательно, вращения.
Электронный модуль, встроенный в двигатель или в корпус, непрерывно регулирует ток, чтобы двигатель работал с максимальной эффективностью.
Это повышает общую производительность и, таким образом, обеспечивает реальное соотношение цены и качества.
Товары из категорий🛠
🔰 Где используются щеточные и бесщеточные двигатели
Как мы уже говорили ранее, бесщеточный двигатель набирает популярность по сравнению с щеточным двигателем. Оба двигателя могут быть найдены в широком спектре применений. Щеточные двигатели постоянного тока по-прежнему часто используются в бытовой технике и автомобилях. Они также сохраняют сильную промышленную нишу благодаря своей способности изменять соотношение крутящего момента к скорости — уникальное свойство для них.
Щеточный или бесщеточный электродвигатель?При такой популярности это неудивительно.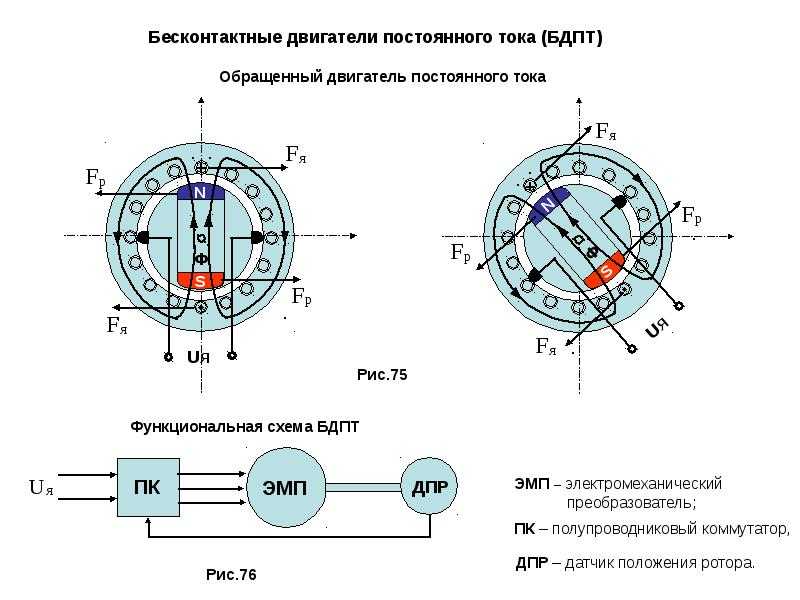 Бесщеточный двигатель работает дольше и потребляет меньше электроэнергии. Он ломается реже – щеток нет, поэтому они не изнашиваются. И это самая распространенная причина повреждения электроинструментов. Он меньше и легче, чем коллекторные, а также более мощный. Из-за этого он обеспечивает лучший крутящий момент. Если инструмент оснащен двигателем такого типа, обычно легко найти информацию о нем, а в случае щеточных двигателей многие производители просто опускают это упоминание.
Бесщеточный двигатель работает дольше и потребляет меньше электроэнергии. Он ломается реже – щеток нет, поэтому они не изнашиваются. И это самая распространенная причина повреждения электроинструментов. Он меньше и легче, чем коллекторные, а также более мощный. Из-за этого он обеспечивает лучший крутящий момент. Если инструмент оснащен двигателем такого типа, обычно легко найти информацию о нем, а в случае щеточных двигателей многие производители просто опускают это упоминание.
Благодаря такой надежности и долговечности бесщеточные двигатели постоянного тока нашли множество применений: производство, вычислительная техника и многое другое. Они используются в электромобилях нового поколения и все большем количестве электроинструментов нового поколения – отверток, дрелей, перфораторов. Они также встречаются в роботах, дронах и радиоуправляемых автомобилях, как игрушечных, любительских, так и профессиональных.
🔰 Щеточный или бесщеточный?
Таким образом, бесщеточные двигатели могут быть более мощными, чем ваши традиционные аккумуляторные инструменты с щеткой. Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора. Этот уровень интеллекта и эффективности приводит к:
Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора. Этот уровень интеллекта и эффективности приводит к:
- Меньший объем технического обслуживания и более длительный срок службы — благодаря отсутствию угольных щеток
- Больше мощности — меньше ограничений в двигателе, который расходует энергию
- Более длительное время работы и меньшая зарядка аккумулятора — благодаря эффективному использованию энергии.
💥 Вам понравилась эта запись в блоге? Почему бы не показать нам немного любви и не поделиться ею! Или прочитайте другие наши записи в блоге, которые полны интересной и информативной информации.
FAQ❓
🔘 Используется ли бесщеточный двигатель в аккумуляторной дрели?
Да, у этого типа дрели меньший вес
🔘 Бесщеточный двигатель чаще встречается в аккумуляторных инструментах?
В настоящее время они более распространены
🔘 Бесщеточный мотор дороже щеточного?
Да бесщеточный мотор дороже
Заключение🧾
бесщеточные двигатели могут быть более мощными, чем ваши традиционные аккумуляторные инструменты с щеткой. Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора.
Беспроводные приборы, использующие бесщеточный электронный двигатель, более эффективны и интеллектуальны в том, как двигатель регулирует расход энергии аккумулятора.
Почему бесщеточные электродвигатели набирают популярность?
Прогресс не стоит на месте, то и дело внедряются новые разработки, благодаря которым техника становится лучше и совершеннее. Так, на смену классических электрических двигателей постепенно приходят бесщеточные (вентильные). Стоит подробнее рассказать о том, по какому принципу они работают, чем отличаются от обычных и в чем их превосходят.
Принцип работы бесщеточного двигателя
В бесщеточном двигателе щеточно-коллекторный узел заменен полупроводниковым коммутатором. Он работает за счет электрических приводов, которые создают магнитное вращающееся поле. Это конструкция нового типа, в которой обмотки на статоре или элементах ротора нет.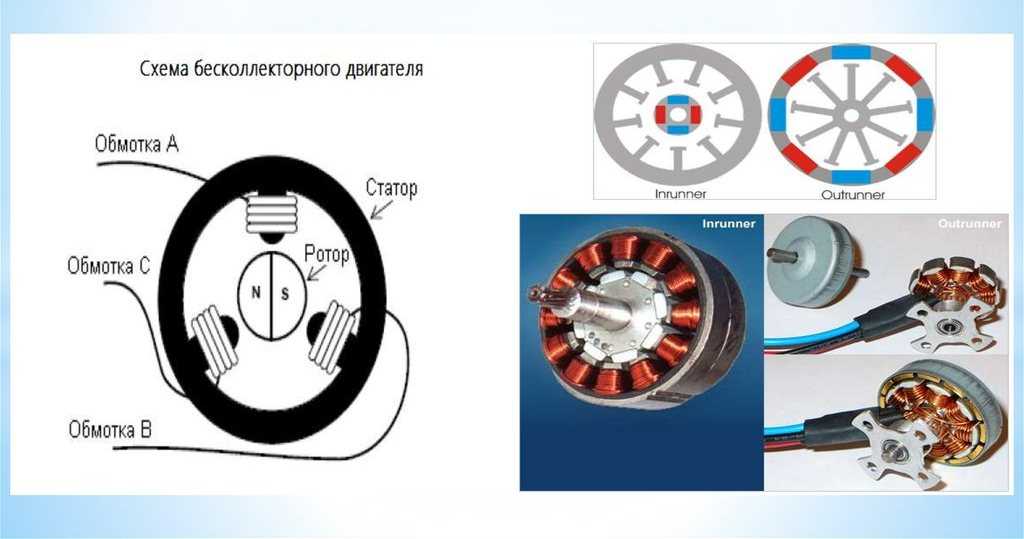
Отсутствие обмотки ротора и механических коммутационных элементов – те технические решения, которые позволяют создавать надежные двигатели по доступной цене. Эти решения существенно упрощают сам процесс их изготовления.
Бесщеточный двигатель может работать как на переменном, так и на непрерывном токе. В случае с непрерывным током он похож на коллекторный двигатель, но у последнего более сложная конструкция, так как основа непременно содержит электронный коммутатор.
Характерные особенности и преимущества бесщеточных двигателей
Бесщеточный двигатель имеет функционал щеточного, но превосходит его по ряду параметров. Единственным его недостатком можно назвать то, что по стоимости он пока превосходит аналоги с классическим мотором, но этот момент в полной мере компенсируется большим перечнем достоинств устройства.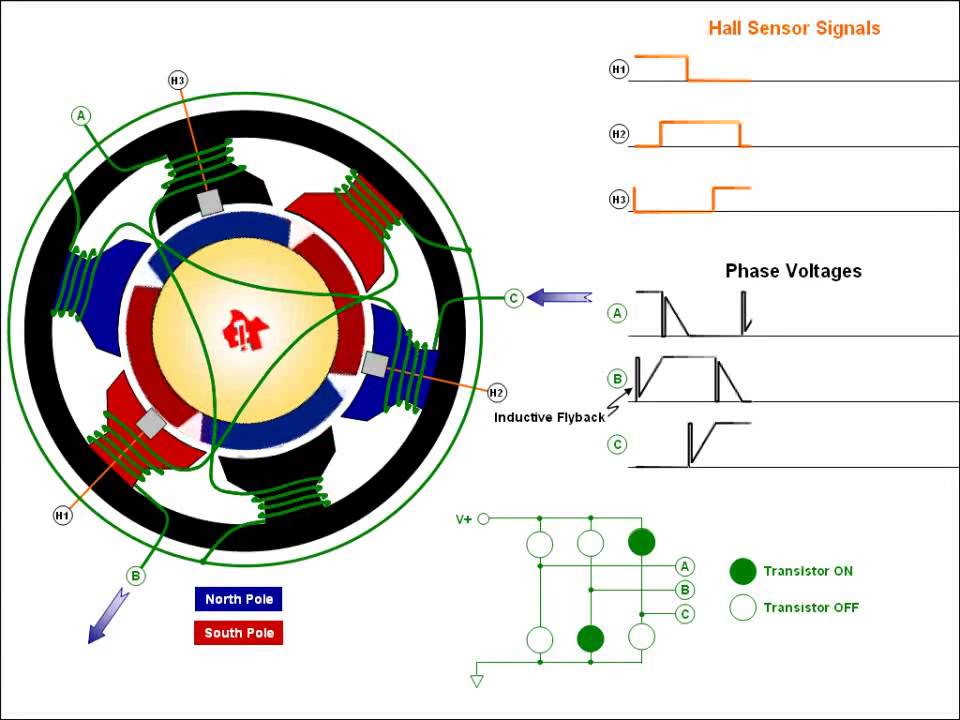 Основные преимущества механизма:
Основные преимущества механизма:
- эффективность;
- при намагничивании нет изменений, как и при утечке тока;
- энергонасыщенность;
- скорость вращения и вращающий момент полностью соответствуют;
- большой диапазон смены частоты вращения;
- скорость не зависит от центробежной силы;
- нет узлов, которые нужно часто обслуживать;
- в конструкции применяются легкие и небольшие магниты;
- не нужны коммутатор и обмотка возбуждения.
Сферы применения бесщеточных двигателей
Вентильные двигатели постоянного тока, как правило, применяются для оборудования с мощностью не выше 5 кВт. Для оборудования мощнее использовать такие двигатели нецелесообразно. Постоянные магниты в бесщеточных моторах очень чувствительны к воздействию мощных полей и высоких температур, что нехарактерно для щеточных и индукционных аналогов.
Бесщеточные двигатели надежны и хорошо управляемы, поэтому они используются повсеместно, как для мелких механизмов, так и для крупных. Они применяются в автомобильных приводах, электрических мотоциклах, компьютерах, электроинструменте, бытовой технике. Двигатели очень востребованы в промышленности, авиационной технике. Благодаря отсутствию коллекторного узла такие двигатели можно использовать даже в опасных условиях, местах с повышенным уровнем влажности.
Они применяются в автомобильных приводах, электрических мотоциклах, компьютерах, электроинструменте, бытовой технике. Двигатели очень востребованы в промышленности, авиационной технике. Благодаря отсутствию коллекторного узла такие двигатели можно использовать даже в опасных условиях, местах с повышенным уровнем влажности.
Metabo выходит на новый уровень, внедряя бесщеточные двигатели в свою технику
Компания Metabo летом 2019 года презентовала широкой аудитории инновационную для отечественного рынка серию отбойных молотков и сетевых перфораторов SDS-Max. Устройства этой линейки оснащены бесщеточными двигателями, что выгодно отличает их от большинства аналогов. В сетевом инструменте такие двигатели пока применяются не слишком часто, особенно если инструмент очень мощный.
Сетевые инструменты с бесщеточными двигателями обладают всеми теми же преимуществами, что и аккумуляторные инструменты. Ключевые достоинства:
- Бесколлекторная схема повышает КПД мотора.

- Высокая надежность. Инструмент с вентильным двигателем имеет более длительный срок эксплуатации, чем обычный, и не нуждается в частом обслуживании. В нем не нужно будет менять щетки, поэтому расходы на ремонт и обслуживания будут существенно снижены. По технике с высоким уровнем вибрации, как отбойные молотки и перфораторы, преимущество отсутствия щеток в двигателе особенно заметно. Из-за колебаний, однозначно возникающих при долблении и бурении, срок службы щеток в разы сокращается. Бесщеточным перфораторам и отбойным молоткам Metabo это не грозит.
- Частоту вращения мотора легко регулировать и поддерживать на необходимом уровне, даже при увеличении нагрузки, перепадах напряжения, ухудшении формы напряжения. Бесщеточные перфораторы и отбойные молотки Metabo будут высокопроизводительны даже при эксплуатации в сложных условиях.
Бесщеточные двигатели обладают массой преимуществ, потому сфера их применения необычайно широка, они используются даже в космической промышленности и ракетостроении. Работающие на таких моторах механизмы с каждым днем становятся популярнее в самых разных сферах.
Как работает бесщеточный двигатель постоянного тока? Объяснение BLDC и ESC
В этом уроке мы узнаем, что такое бесщеточный двигатель постоянного тока или BLDC и как он работает. Мы также расскажем, как работает электронный регулятор скорости или ESC, электронная схема, используемая для управления бесколлекторными двигателями.
Это статья из двух частей, в первой части мы изучим принцип работы бесколлекторного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части узнаем, как управлять бесщеточным двигателем постоянного тока с помощью Arduino.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Что такое бесщеточный двигатель постоянного тока?
Бесщеточный двигатель постоянного тока или BLDC представляет собой электродвигатель, работающий от постоянного тока и генерирующий движение без каких-либо щеток, как в обычных двигателях постоянного тока.
Бесщеточные двигатели более популярны в настоящее время, чем обычные коллекторные двигатели постоянного тока, поскольку они имеют более высокий КПД, могут обеспечивать точное регулирование крутящего момента и скорости вращения, а также обеспечивают высокую надежность и низкий уровень электрических шумов благодаря отсутствию щеток.
Двигатели постоянного тока BLDC используются в приложениях, где требуется эффективность и долговечность, таких как стиральные машины, кондиционеры и другая бытовая электроника. Также они используются в жестких дисках, радиоуправляемых моделях, таких как радиоуправляемые самолеты и так далее.
Как работает бесщеточный двигатель постоянного тока?
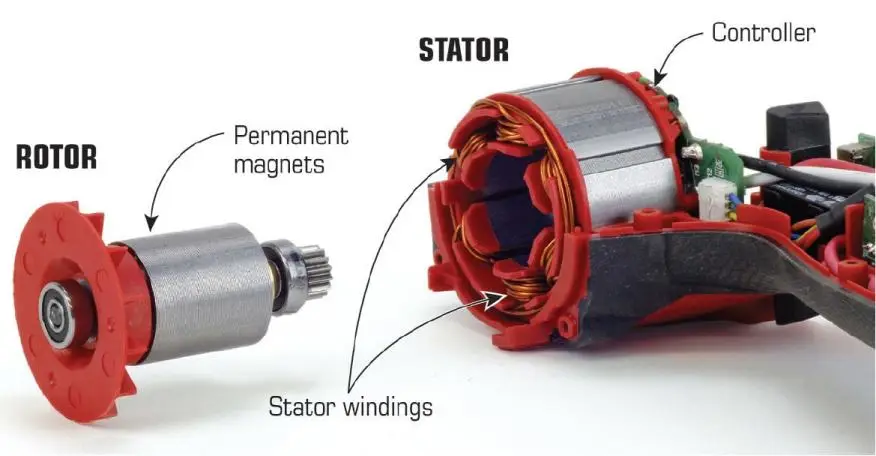
Бесщеточный двигатель (BLDC) состоит из двух основных частей: статора и ротора. Для этой иллюстрации ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
Все мы знаем, что если подать ток через катушку, она создаст магнитное поле, а линии или полюса магнитного поля зависят от направления тока.
Итак, если мы применим соответствующий ток, катушка создаст магнитное поле, которое будет притягивать постоянный магнит ротора. Теперь, если мы активируем каждую катушку одну за другой, ротор будет продолжать вращаться из-за силового взаимодействия между перманентом и электромагнитом.
Чтобы повысить КПД двигателя, мы можем намотать две противоположные катушки как одну катушку таким образом, чтобы полюса были противоположны полюсам ротора, таким образом, мы получим двойную силу притяжения.
С помощью этой конфигурации мы можем создать шесть полюсов на статоре всего с тремя катушками или фазой. Мы можем еще больше повысить эффективность, подав питание на две катушки одновременно. Таким образом, одна катушка будет притягивать, а другая — отталкивать ротор.
Для того, чтобы ротор совершил полный цикл на 360 градусов, необходимо шесть шагов или интервалов.
Если мы посмотрим на форму волны тока, то увидим, что в каждом интервале есть одна фаза с положительным током, одна фаза с отрицательным током, а третья фаза отключена.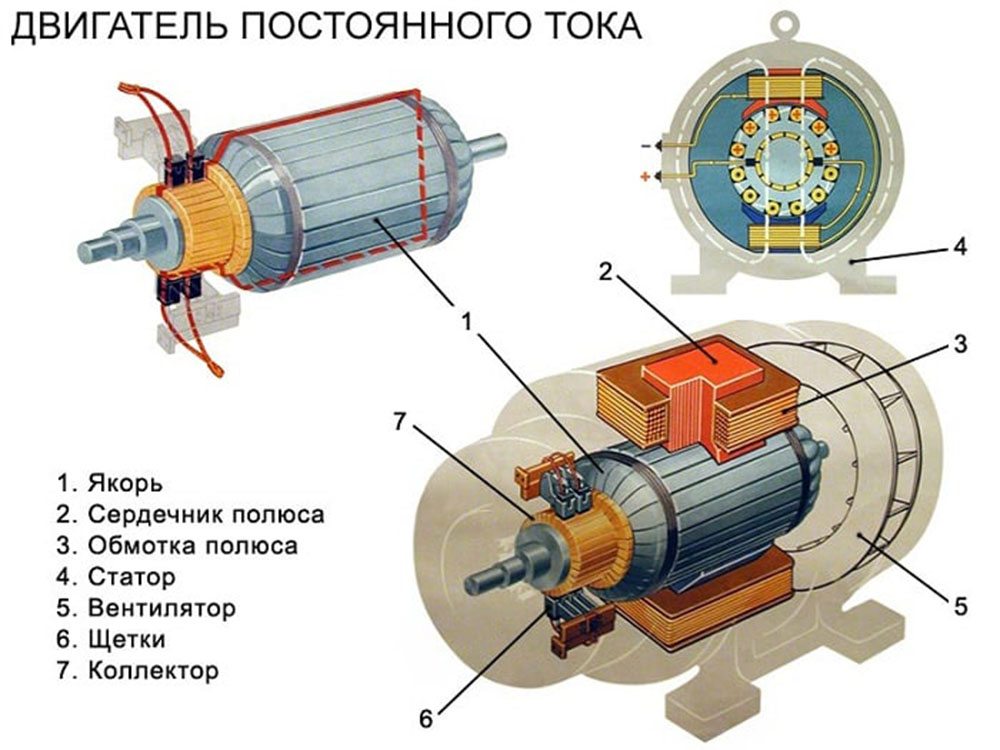 Это наводит на мысль, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и, таким образом, мы можем разделить ток между ними или использовать один ток для питания двух фаз одновременно.
Это наводит на мысль, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и, таким образом, мы можем разделить ток между ними или использовать один ток для питания двух фаз одновременно.
Вот пример. Если мы подтянем фазу A High или подключим ее к положительному напряжению постоянного тока с помощью какого-либо переключателя, например MOSFET, а с другой стороны соединим фазу B с землей, то ток будет течь от VCC через фазу А, нейтральную точку и фазу В, на землю. Итак, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
В этой конфигурации мы фактически имеем соединение фаз двигателя звездой, где нейтральная точка соединена внутри, а остальные три конца фаз выходят из двигателя, поэтому из бесщеточного двигателя выходят три провода.
Итак, для того, чтобы ротор прошел полный цикл, нам просто нужно активировать правильные два МОП-транзистора в каждом из 6 интервалов, и это то, что на самом деле делают ESC.
Как работает ESC (электронный регулятор скорости)
ESC или электронный регулятор скорости управляет движением или скоростью бесколлекторного двигателя, активируя соответствующие МОП-транзисторы для создания вращающегося магнитного поля, заставляющего двигатель вращаться. Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Однако возникает важный вопрос: как узнать, когда какую фазу активировать. Ответ заключается в том, что нам нужно знать положение ротора, и есть два распространенных метода, используемых для определения положения ротора.
Первый распространенный метод заключается в использовании датчиков Холла, встроенных в статор, расположенных под углом 120 или 60 градусов друг к другу.
Когда постоянные магниты ротора вращаются, датчики Холла воспринимают магнитное поле и генерируют логический «высокий» для одного магнитного полюса или логический «низкий» для противоположного полюса. В соответствии с этой информацией ESC знает, когда активировать следующую коммутационную последовательность или интервал.
Второй распространенный метод, используемый для определения положения ротора, заключается в измерении обратной электродвижущей силы или обратной ЭДС. Обратная ЭДС возникает в результате прямо противоположного процесса генерации магнитного поля или когда движущееся или изменяющееся магнитное поле проходит через катушку, оно индуцирует ток в катушке.
Таким образом, когда движущееся магнитное поле ротора проходит через свободную катушку или ту, которая не активна, оно индуцирует ток в катушке, и в результате в этой катушке возникает падение напряжения. ESC фиксирует эти падения напряжения по мере их возникновения и на их основе прогнозирует или рассчитывает, когда должен произойти следующий интервал.
Таков основной принцип работы бесколлекторных двигателей постоянного тока и регуляторов скорости, и он останется тем же, даже если мы увеличим количество полюсов как ротора, так и статора. У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы совершить полный цикл.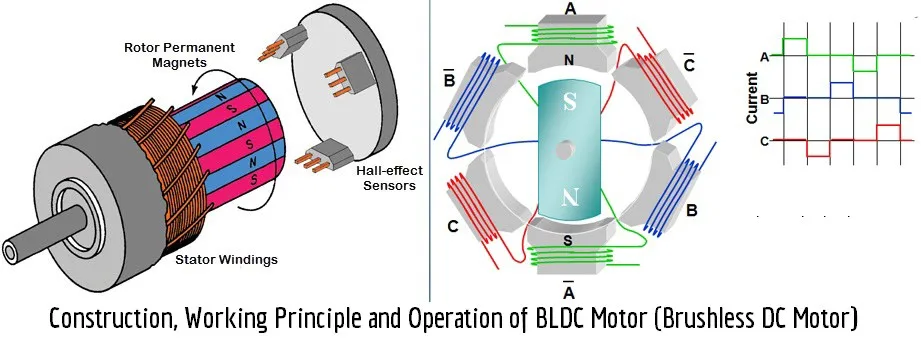
Здесь мы также можем упомянуть, что двигатели BLDC могут быть инраннерами или аутраннерами. Бесщеточный двигатель с внутренним ротором имеет постоянные магниты внутри электромагнитов, и наоборот, двигатель с наружным ротором имеет постоянные магниты снаружи электромагнитов. Опять же, они используют один и тот же принцип работы, и каждый из них имеет свои сильные и слабые стороны.
Связано: Шаговые двигатели и Arduino — Полное руководство
Демонстрация работы BLDC и ESC
Хорошо, достаточно теории, так что теперь давайте продемонстрируем и увидим в реальной жизни то, что мы объяснили выше. Для этого мы подключим три фазы бесщеточного двигателя к осциллографу. Я подключил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Первое, что мы можем заметить, это три синусоиды. Эти синусоидальные волны на самом деле являются обратными EFM, генерируемыми в фазах, когда они не активны.
Мы видим, что при изменении оборотов двигателя частота синусоидальных волн меняется, а также их амплитуда. Чем выше число оборотов, тем выше частота и амплитуда синусоидальных волн противоЭДС. Однако то, что приводит в движение двигатель, на самом деле эти пики, которые являются активными фазами, которые генерируют изменяющееся магнитное поле.
Мы можем заметить, что на каждом интервале есть две активные и одна неактивная фаза. Например, здесь у нас активны фазы A и B, а фаза C неактивна. Затем у нас активны фазы A и C, а фаза B неактивна и так далее.
Заключение
Итак, мы рассмотрели основной принцип работы бесщеточного двигателя и то, как он работает в сочетании с ESC. Если вам нужны еще реальные живые примеры и вы научились управлять бесколлекторными двигателями с помощью Arduino, вам следует ознакомиться со второй частью этого руководства.
Здесь вы можете ознакомиться с некоторыми из моих проектов, в которых я использовал двигатели BLDC:
- Радиоуправляемый самолет Arduino | 100% DIY
- Самодельный радиоуправляемый корабль на воздушной подушке на базе Arduino
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любые вопросы в разделе комментариев ниже и не забудьте проверить мою коллекцию проектов Arduino.
Не стесняйтесь задавать любые вопросы в разделе комментариев ниже и не забудьте проверить мою коллекцию проектов Arduino.
Основы бесщеточных двигателей постоянного тока (BLDC Motors)
В этом уроке мы узнаем о бесщеточных двигателях, также известных как бесщеточные двигатели постоянного тока или двигатели BLDC. Мы увидим, что такое двигатель BLDC, принцип его работы, как правильно управлять бесколлекторным двигателем постоянного тока, а также несколько приложений.
[адсенс1]
Краткое описание
Введение
Бесколлекторные двигатели постоянного тока или бесщеточные двигатели постоянного тока внесли значительный вклад в развитие современной приводной техники. Их быстрый рост популярности привел к расширению спектра применения в области бытовой техники, автомобильной промышленности, промышленной автоматизации, химической и медицинской, аэрокосмической и приборостроительной промышленности.
Несмотря на то, что они долгое время использовались для приводов и производства электроэнергии, субкиловаттный диапазон, в котором доминировали щеточные двигатели постоянного тока, всегда был серой зоной. Но современная силовая электроника и микропроцессорная технология позволили небольшим бесколлекторным двигателям постоянного тока процветать как с точки зрения цены, так и с точки зрения производительности.
Но современная силовая электроника и микропроцессорная технология позволили небольшим бесколлекторным двигателям постоянного тока процветать как с точки зрения цены, так и с точки зрения производительности.
[адсенс2]
Что такое двигатель BLDC?
Бесщеточный двигатель постоянного тока аналогичен щеточному двигателю постоянного тока, но, как следует из названия, в бесщеточном двигателе постоянного тока не используются щетки для коммутации, а они коммутируются электронным способом. В обычных щеточных двигателях постоянного тока щетки используются для передачи мощности на ротор, когда они вращаются в фиксированном магнитном поле.
Как упоминалось ранее, двигатель BLDC использует электронную коммутацию и, таким образом, устраняет необходимость в механически рвущихся щетках.
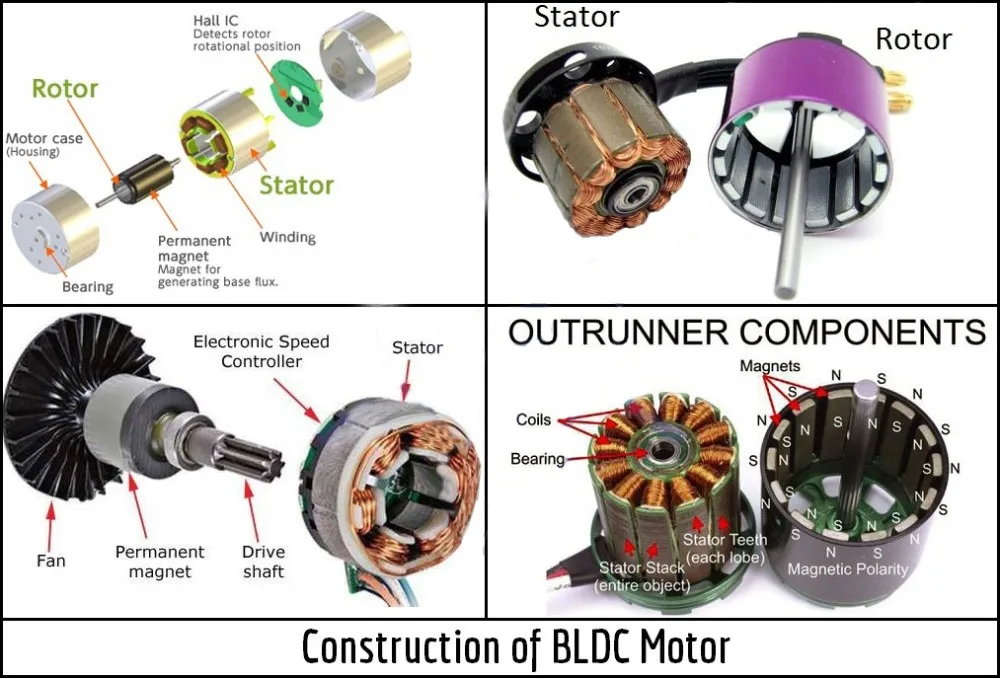
Конструкция бесщеточного двигателя постоянного тока
Основное конструктивное различие между щеточными и бесщеточными двигателями заключается в замене механического коммутатора электрической схемой переключения. Имея это в виду, двигатель BLDC является типом синхронного двигателя в том смысле, что магнитное поле, создаваемое статором и ротором, вращается с одинаковой частотой.
Имея это в виду, двигатель BLDC является типом синхронного двигателя в том смысле, что магнитное поле, создаваемое статором и ротором, вращается с одинаковой частотой.
Бесколлекторные двигатели доступны в трех конфигурациях: однофазные, двухфазные и трехфазные. Из них трехфазный BLDC является наиболее распространенным.
На следующем изображении показано поперечное сечение двигателя BLDC.
Как вы можете видеть на изображении, BLDC Motor состоит из двух основных частей: статора и ротора.
Статор
Структура статора бесконтактного двигателя постоянного тока аналогична конструкции асинхронного двигателя. Он состоит из штабелированных стальных пластин с аксиально прорезанными пазами для намотки. Обмотка BLDC немного отличается от обмотки традиционного асинхронного двигателя.
Как правило, большинство двигателей BLDC состоят из трех обмоток статора, соединенных звездой или звездой (без нейтральной точки). Кроме того, в зависимости от соединений катушек обмотки статора подразделяются на трапециевидные и синусоидальные двигатели.
В трапециевидном двигателе как управляющий ток, так и противо-ЭДС имеют форму трапеции (синусоидальная форма в случае синусоидальных двигателей). Обычно двигатели с номинальным напряжением 48 В (или меньше) используются в автомобилестроении и робототехнике (гибридные автомобили и роботизированные руки).
Ротор
Роторная часть двигателя BLDC состоит из постоянных магнитов (обычно магнитов из редкоземельных сплавов, таких как неодим (Nd), самарий-кобальт (SmCo) и сплав неодима, феррита и бора (NdFeB)).
В зависимости от применения количество полюсов может варьироваться от двух до восьми, при этом северный (N) и южный (S) полюса размещаются попеременно. На следующем изображении показаны три различных расположения полюсов. В первом случае магниты размещены на внешней периферии ротора.
Вторая конфигурация называется ротором с магнитными вставками, где прямоугольные постоянные магниты встроены в сердечник ротора. В третьем случае магниты вставлены в железный сердечник ротора.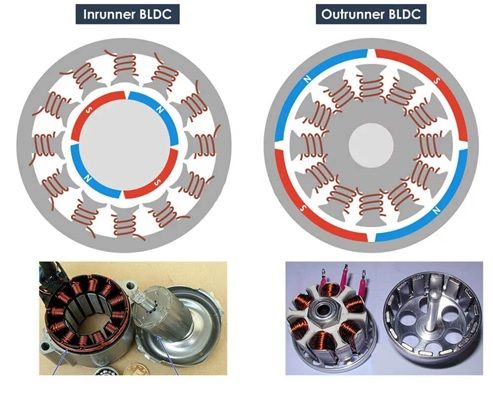
Датчики положения (датчики Холла)
Поскольку в бесщеточном двигателе постоянного тока нет щеток, коммутация управляется электронным способом. Чтобы вращать двигатель, обмотки статора должны быть запитаны в определенной последовательности, и положение ротора (то есть северный и южный полюса ротора) должно быть известно, чтобы точно подать питание на определенный набор обмоток статора.
Датчик положения, который обычно представляет собой датчик Холла (работающий по принципу эффекта Холла), обычно используется для определения положения ротора и преобразования его в электрический сигнал. В большинстве двигателей BLDC используются три датчика Холла, встроенные в статор, для определения положения ротора.
Выходной сигнал датчика Холла будет ВЫСОКИМ или НИЗКИМ в зависимости от того, проходит ли рядом с ним северный или южный полюс ротора. Комбинируя результаты трех датчиков, можно определить точную последовательность подачи питания.
Читать о КАК ИСПОЛЬЗОВАТЬ ДАТЧИК ХОЛЛА С ARDUINO?
Принцип работы
Рассмотрим следующую схему трех обмоток статора, обозначенных A, B и C.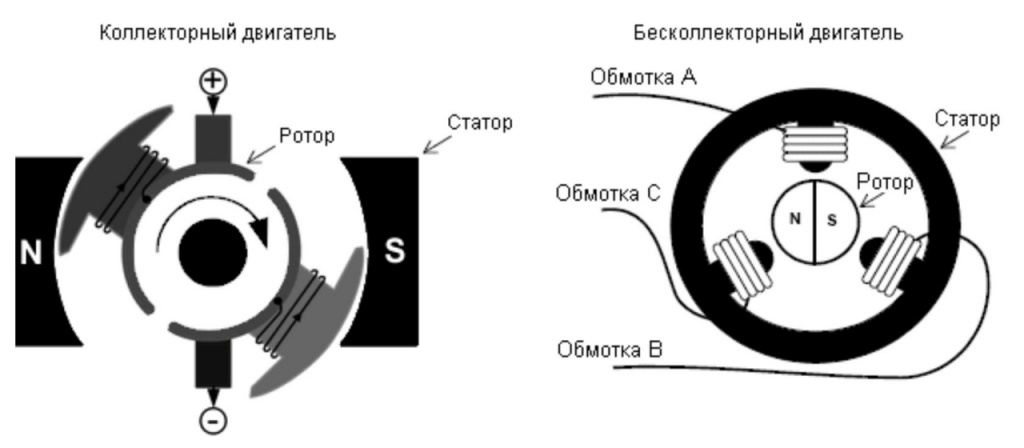 Для лучшего понимания заменим ротор одним магнитом.
Для лучшего понимания заменим ротор одним магнитом.
Мы знаем, что когда ток проходит через катушку, создается магнитное поле, и ориентация силовых линий, т. е. полюсов генерируемого магнита, будет зависеть от направления тока, протекающего через катушку.
Используя этот принцип, если мы подаем ток на катушку A, чтобы она создавала магнитное поле и притягивала магнит ротора. Положение магнита ротора немного сдвинется по часовой стрелке и выровняется с A.
Если теперь мы пропустим ток через катушки B и C одну за другой (в таком порядке), магнит ротора будет вращаться по часовой стрелке.
Для повышения эффективности мы можем намотать противоположные катушки, используя одну катушку, чтобы получить двойное притяжение. Еще больше повышая эффективность, мы можем запитать две катушки одновременно, чтобы одна катушка притягивала магнит, а другая катушка отталкивала его. В это время третий будет простаивать.
Для полного оборота магнита ротора на 360 0 применимы шесть возможных комбинаций катушек A, B и C, которые показаны на следующей временной диаграмме.
Основываясь на приведенной выше диаграмме, мы можем подтвердить, что в любое время одна фаза положительная, одна фаза отрицательная, а третья фаза простаивает (или плавает). Итак, на основе входных сигналов от датчиков Холла у нас есть два переключателя фаз в соответствии с приведенной выше схемой.
Управление бесщеточными двигателями постоянного тока
Если статор и ротор являются неотъемлемыми частями двигателя BLDC, которые являются его неотъемлемой частью, то приводная электроника не менее важна. Блок-схема типичной системы управления бесщеточным двигателем постоянного тока или системы привода показана на следующем рисунке.
Эта схема привода часто известна как система электронного регулятора скорости или просто ESC. Одна из распространенных настроек называется схемой полного моста. Он состоит из MCU с выходами PWM, шести МОП-транзисторов для трех фаз обмоток статора, обратной связи от датчиков Холла и некоторых компонентов, связанных с питанием.