
Какой шуруповерт лучше — щеточный или бесщеточный?
Статьи
Базовые различия двигателей, и как это влияет на инструмент
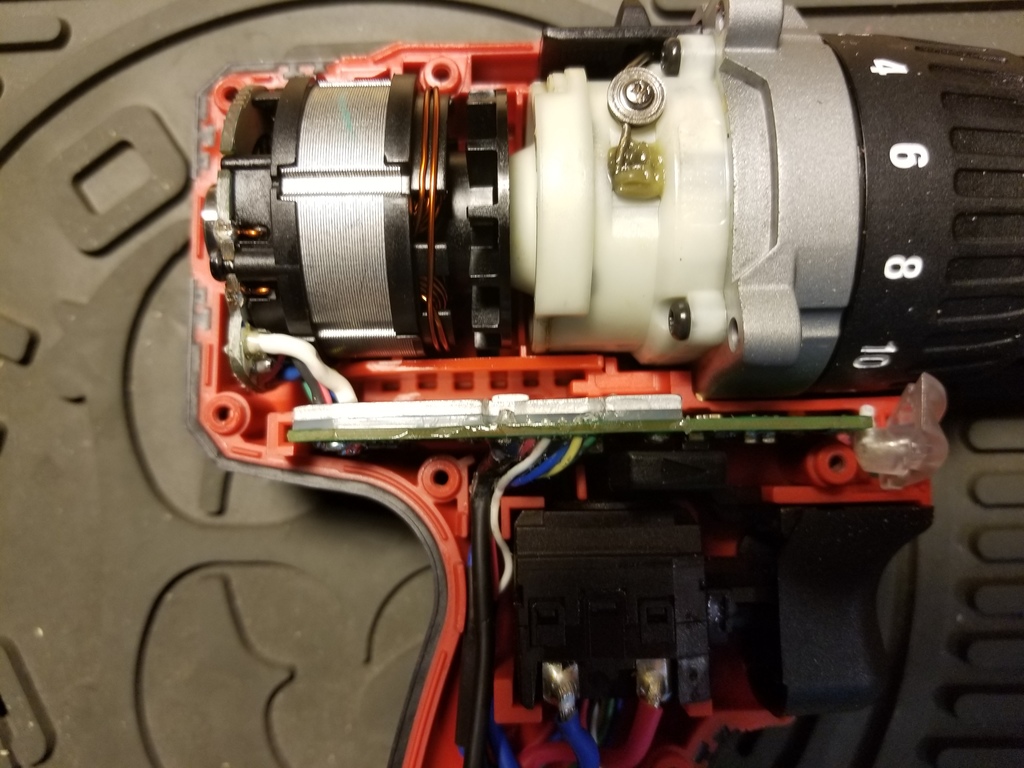
Чем отличаются щеточные и бесщеточные двигатели, легко понять по их названиям. Разница — в конструкции, а именно:
- щеточные моторы (коллекторные) оснащены двумя щетками из углерода, которые подводят электричество от аккумулятора к мотору. При работе происходит трение, выделяется тепло, тратится энергия.
- бесщеточные моторы (бесколлекторные) передают электричество напрямую, создавая магнитное поле. Они имеют минимум движущихся частей, работают без трения.
В зависимости от того, каким двигателем оснащен шуруповерт, он будет иметь некоторые особенности.
Щеточный шуруповерт: ниже ресурс, дешевле инструмент и ремонт
Двигатели с угольными щетками в аккумуляторных дрелях-шуруповертах — это старая технология, проверенная временем. Двигатели универсальны: в шуруповерт устанавливается двигатель в сборе (есть несколько типоразмеров), что делает инструмент очень удобным в плане ремонта. Более простая конструкция = проще в обслуживании. В связи с этим шуруповерты со щеточными двигателями доступнее по цене.
Более простая конструкция = проще в обслуживании. В связи с этим шуруповерты со щеточными двигателями доступнее по цене.
Многие шуруповерты Worx оснащены щеточными моторами, и это отличные инструменты для домашних мастеров (например, модели WX101.1, WX176.2, WX178).
В то же время технология имеет несколько слабых сторон:
- щетки со временем изнашиваются, поэтому такие двигатели имеют меньший ресурс, чем бесщеточные;
- при длительной напряженной работе мотор нагревается, поэтому иногда требуется делать перерывы;
- от трения щеток могут возникать искры — это значит, что не стоит работать таким шуруповертом вблизи от легковоспламеняющихся веществ.
- на трение расходуется энергия, поэтому моторы обладают более низким КПД по сравнению с бесщеточными.
Бесщеточный шуруповерт: выше ресурс, дороже инструмент и ремонт
Бесщеточный двигатель — более современный. Его использование в конструкции шуруповерта прибавляет до + 25% к мощности и до + 10% к сроку службы двигателя (а значит и самого инструмента). Если шуруповерт аккумуляторный, технология также обеспечивает до + 50% к длительности работы на одном заряде, поскольку бесщеточный мотор более экономно расходует энергию. Все эти показатели достигаются благодаря отсутствию щеточного узла, наверно самого быстроизнашиваемого в инструменте, отсутствию потерь на трение, нагрев и т.д.
Если шуруповерт аккумуляторный, технология также обеспечивает до + 50% к длительности работы на одном заряде, поскольку бесщеточный мотор более экономно расходует энергию. Все эти показатели достигаются благодаря отсутствию щеточного узла, наверно самого быстроизнашиваемого в инструменте, отсутствию потерь на трение, нагрев и т.д.
Отсутствие щеточного узла позволяет уменьшить габариты двигателя (и инструмента) по длине на 2-3 см, а значит дрель-шуруповерт с таким двигателем может больше подходить для работы в труднодоступных местах.
Кроме того, бесщеточный двигатель работает без искр, поэтому инструмент можно использовать практически в любых условиях. Более сложная конструкция двигателя и все перечисленные преимущества объясняют более высокую стоимость такого шуруповерта.
Среди дрелей-шуруповертов Worx бесщеточными двигателями, которые эффективнее щеточных справляются с повышенной нагрузкой, оснащены модели WX102, WX175, а также ударные модели WX352 и WX354.
Следует также отметить недостатки бесщеточных двигателей:
- такие двигатели «боятся» металлической окалины, пыли, стружки, любых мелких предметов (ротор бесщеточного двигателя представляет собой постоянный магнит), которые могут попасть внутрь инструмента и испортить двигатель.
 Производители борются с этим, устанавливая на вентиляционные отверстия мелкую сетку.
Производители борются с этим, устанавливая на вентиляционные отверстия мелкую сетку. - конструкция имеет минимум движущихся частей и отсюда меньшая вероятность поломок, однако если ремонт потребуется, то починить бесщеточный шуруповерт обойдется дороже.
 Производители борются с этим, устанавливая на вентиляционные отверстия мелкую сетку.
Производители борются с этим, устанавливая на вентиляционные отверстия мелкую сетку.Если использовать шуруповерт требуется время от времени, то щеточный станет идеальным вариантом. А для частого использования и более напряженной работы следует присмотреться к бесщеточным моделям.
/от manpan
https://worx.ru/wp-content/uploads/2021/11/Kakoj-shurupovert-luchshe_Cover.jpg 1280 1920 manpan https://worx.ru/wp-content/uploads/2020/07/logo.png manpan2021-11-18 19:26:182021-11-18 19:28:13Какой шуруповерт лучше — щеточный или бесщеточный?Бесщеточные двигатели | Компания Fulling
1. Информация о продукции
Конструкция
Корпус: статор, ротор
Датчики: датчик Холла
Особенности
Быстрый отклик, высокий стартовый вращающий момент, меньший объем электромагнитного излучения, высокая эффективность и надежность, широкий диапазон регулирования скорости, высокая применимость, высокое сопротивление радиопомехам, низкий уровень шума, хорошие изоляционные свойства, низкая стоимость обслуживания, малый размер, длительный срок службы
Преимущества удаления щеток
Бесщеточный двигатель постоянного тока имеет отличные характеристики регулирования скорости.
Как достичь низкого уровня помех и шума
Наши двигатели характеризуются низким уровнем помех. Применение оптимизированной конструкции и точных шариковых подшипников существенно снижает вибрацию и шум во время работы.
Как достичь большего энергосбережения
Применение высокопроизводительных редкоземельных магнитов не только позволяет производить бесщеточные двигатели с размером меньше, чем у щеточных двигателей постоянного тока и двигателей переменного тока, но и сделать их более эффективными. Кроме того, применение технологии VVVF и др. помогает значительно уменьшить потребление энергии.
Применение
Промышленная автоматизация (текстильные машины, оборудование для открытия дверей), бытовая техника, автомобили, автоматизации делопроизводства (принтеры), медицинское оборудование
2. Сертификация
Сертификация
Наш продукция получила сертификаты CE и RoHS. По запросу клиентов мы также можем подать заявку на сертификацию UL.
3. Детали по выбору
4. Примечания
A. Выбирайте привод в соответствии с рабочим напряжением электродвигателя. Напряжение должно быть в пределах диапазона напряжений привода.
Б. Максимальный ток = номинальная мощность × 4/номинальное напряжения. Пиковый ток выбранного привода должен приближаться или превышать значение, рассчитанное в соответствии с приведенной выше формулой.
 Используйте только те приводы, которые были рекомендованы нашими сотрудниками.
Используйте только те приводы, которые были рекомендованы нашими сотрудниками.Г. Выводные провода обмотки электродвигателя могут влиять на линию сигнала Холла, поэтому они должны быть подключены отдельно. При выводных проводах обмотки длиннее 500 мм, рекомендуется использовать экранированный провод для отделения от сигнальной линии Холла.
Схожая продукция
Бесщеточное электрическое устройство | Двигатели без щеток | Машина с бесщеточным мотором | Электронное устройство без щетки
Drone Motor Fundamentals – Как работает бесщеточный двигатель
Это руководство поможет вам понять динамику бесколлекторного двигателя дрона, используемого на квадрокоптерах, и то, как он влияет на летные характеристики. Мы углубимся в типы двигателей, варианты конструкции, вес, общую мощность и другие факторы, влияющие на производительность квадроцикла. Итак, давайте начнем.
Подробнее…
Быстрая навигация
Различия между щеточными и бесщеточными двигателями
Основы бесщеточного двигателя
Thrust к весовому соотношению
Quad Motor Size — более высокие и более широкие статоры
Диаграмма бесщеточного размера мотора
Коэффициенты производительности
кВ — постоянная скорость
Крутящий момент
Эффективность
Текущий нарисование
. Другие факторы. рассмотреть
Другие факторы. рассмотреть
Номера N и P
Одножильные и многожильные провода
Магниты
Обмотки двигателя
Вес двигателя
Схемы монтажа двигателя
Особенности для поиска в двигателях
Моторный вал
Air Gap
Моторные провода
Зажимы для фиксации
CW CCW Двигатели
Обнаженные или закрытые дно
Заключение
Для начинающих есть 2 типа мощер. используются в дронах: коллекторные и бесколлекторные двигатели. Они различаются по способу работы. Бесщеточные двигатели намного мощнее для своего веса, чем щеточные двигатели, и они служат намного дольше. Для больших квадроциклов: бесспорно, бесколлекторный — это главное.
Но для микро- и нано-дронов просто фантастика иметь эти дешевые моторы, которые уверенно разбиваются.
Внутренняя работа щеточного и бесщеточного двигателей одинакова; оба основаны на электромагнетизме.
Когда на обмотки двигателя подается напряжение (оба двигателя имеют катушки), создается временное магнитное поле, которое отталкивает (и/или притягивает) постоянные магниты, находящиеся внутри двигателя.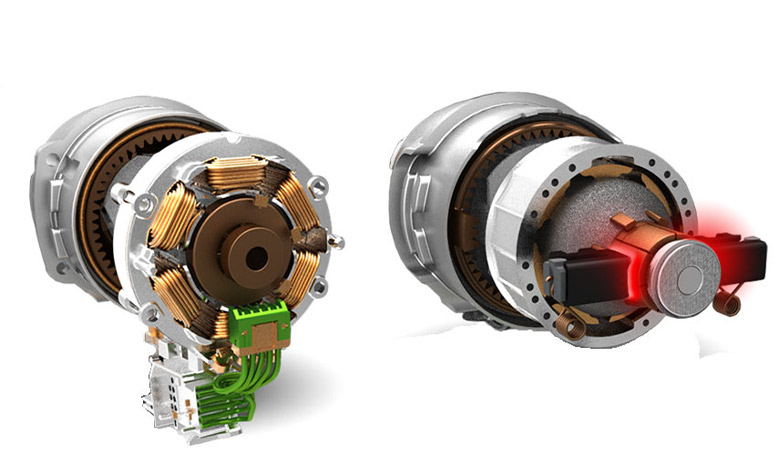
Эта магнитная сила создает силу отталкивания в катушке, которая используется для вращения/вращения вала.
Разница между щеточными и бесщеточными двигателями
КПД бесщеточных двигателей обычно составляет 85–90 %, а щеточных двигателей постоянного тока — 75–80 %. Обмотки присутствуют на роторе щеточного двигателя по сравнению со статором бесщеточного двигателя
Эта разница в эффективности означает, что большая часть общей мощности, используемой двигателем, превращается во вращательную силу, и меньше мощности теряется при нагревать.
Бесщеточный двигатель служит дольше, потому что щетки не изнашиваются, а щеточный двигатель быстро изнашивается. Это одна из причин, по которой щеточные двигатели оказались дешевле бесщеточных.
Это руководство в основном ориентировано на бесщеточные двигатели, используемые в конфигурациях дронов для гонок/фристайла.
Бесстраночные двигатели для Quadcopter
Iflight XING2 2306
Лучшее значение для денег
Лучшее соотношение цены и качества
IFLIGHT XING 2 2306
111101110111011101111. от АйФлайт. Xing2 бывают разных форм, но именно двигатели размера 2306 предлагают наилучшую отдачу от вложенных средств.
от АйФлайт. Xing2 бывают разных форм, но именно двигатели размера 2306 предлагают наилучшую отдачу от вложенных средств.$ Проверить цену на Amazon
Xing2 2306 выпускается в двух модификациях — 1755KV для 6S и 2555KV для 4S — оснащен большими высококачественными подшипниками NSK, увеличивающими срок службы этих двигателей. При цене около 20 долларов технические характеристики этих двигателей производят на нас сильное впечатление. Эти двигатели обмотаны проводами калибра 20AWG и оснащены изогнутыми дуговыми магнитами N52H, которые уменьшают и без того тонкий зазор между статором и ротором и повышают эффективность. Валы из титанового сплава, раструб из алюминия 7075 и NSK 9Подшипники x9x4 гарантируют, что этот двигатель оснащен решеткой. Xing2 оснащены уплотнительными кольцами на подшипниках между раструбом двигателя и статором, сохраняя зазор в подшипнике плотным, чтобы уменьшить вибрации, вызванные высокими оборотами. Все эти функции достигаются при номинальном весе 31,6 г.
Emax Eco II 2207
Лучший бюджет
Лучший бюджет
Emax Eco II 2207
Emax — один из старого Drone Speconder. продукты с отличным соотношением цены и качества по бюджету.
$ Проверить цену на Amazon
Двигатели Emax ECO II выпускаются в трех вариантах на кВ — 1700 кВ, 1900 кВ и 2400 кВ. Эти двигатели оснащены стальными валами, прецизионными подшипниками для устранения вибрации роторов и многожильными обмотками для лучшей электропроводности. ECO II поставляются с тремя различными рейтингами KV, чтобы пилоты могли запускать Lipo от 3 до 6S, что дает пилотам возможность поэкспериментировать с размерами пропеллеров. Крепления двигателя 16×16 гарантируют, что пилотам не придется беспокоиться о том, чтобы двигатели подходили к раме. Конструкция с открытым дном помогает уменьшить общий вес двигателя, но грязь и мусор могут попасть в корпус двигателя во время аварии. Эти двигатели не обеспечивают наилучшей производительности, а лучше всего служат в качестве венчика. Недорогая модель ECO II за 13 долларов делает ее идеальным выбором для любителей, пытающихся окунуться в мир FPV.
Конструкция с открытым дном помогает уменьшить общий вес двигателя, но грязь и мусор могут попасть в корпус двигателя во время аварии. Эти двигатели не обеспечивают наилучшей производительности, а лучше всего служат в качестве венчика. Недорогая модель ECO II за 13 долларов делает ее идеальным выбором для любителей, пытающихся окунуться в мир FPV.
T-Motor F60 Pro v
Лучший бюджет
Лучший бюджет
T-Motor F60 Pro v
Emax-один из старого Shander Drone Drone, а также старый Shander Drone, и старый Shander Drone, а также Studtest Drone Drone, а также Studtest Drone Drone, а также Studtest Drone Drone, а также Studtest Shone хорошо известен тем, что предлагает отличные продукты по бюджету.
$ Проверить цену на Amazon
Pro Vs сильны. Эти двигатели имеют 4 различных номинала KV — 1750KV, 1950KV, 2020KV и 2550KV, и могут выдерживать пиковую мощность более 1000W. Pro V — самые мощные двигатели в этом списке, при правильном напряжении и пропеллере эти двигатели могут развивать тягу до 1800 г. Вся эта тяга достигается за счет неэффективности. T-Motor утверждает, что новая «конструкция крышки со смещенными сухожилиями» в верхней части двигателя оптимизирована для обеспечения прочности и долговечности. Эти моторы в первую очередь предназначены для гонок, а такие особенности, как увеличенная площадь контакта с основанием, делают дрон более стабильным, импортные шарикоподшипники EZO обеспечивают плавное вращение моторов дольше, а алюминиевый корпус и титановый вал обеспечивают низкий общий вес дрона. мотор под 34g.
Эти двигатели имеют 4 различных номинала KV — 1750KV, 1950KV, 2020KV и 2550KV, и могут выдерживать пиковую мощность более 1000W. Pro V — самые мощные двигатели в этом списке, при правильном напряжении и пропеллере эти двигатели могут развивать тягу до 1800 г. Вся эта тяга достигается за счет неэффективности. T-Motor утверждает, что новая «конструкция крышки со смещенными сухожилиями» в верхней части двигателя оптимизирована для обеспечения прочности и долговечности. Эти моторы в первую очередь предназначены для гонок, а такие особенности, как увеличенная площадь контакта с основанием, делают дрон более стабильным, импортные шарикоподшипники EZO обеспечивают плавное вращение моторов дольше, а алюминиевый корпус и титановый вал обеспечивают низкий общий вес дрона. мотор под 34g.
Five33 2207
Легкие сборки
Легкие сборки
Five33 2207
‘Evan Turner’, один из Pastept Silots Silots Silots Off Pppring of Pppring of Prone Silots of Prone of Prontes of Prone of Prone of Prone of Prone Silots of Prone. этого безумного гения — сверхлегкий, безумно мощный мотор, который посрамляет любой другой мотор в этом списке.
этого безумного гения — сверхлегкий, безумно мощный мотор, который посрамляет любой другой мотор в этом списке.
$ Проверить цену на Flyfive
Не такой легкий вес 28,4 г, в сочетании с правильным реквизитом может произвести более 900 Вт мощности. Five33 — компания, основанная двукратным чемпионом MultiGP Эваном Тернером. Это единственный двигатель в линейке Five33, и он имеет один рейтинг KV — 1960KV. Эван говорит, что, когда он проектировал двигатель, он хотел, чтобы он работал в паре с винтом с низким шагом. Он считает, что двигатель с высоким значением KV в сочетании с легким винтом даст наибольшую отзывчивость. С практической точки зрения на уловку, использованную Эваном, винт с более легким шагом является энергоэффективным и создает немного меньшую тягу. Но вместо этого Эван говорит, что квадроцикл, способный достичь Луны и оставаться на плаву в течение 1 минуты 30 секунд, — плохой вариант; по сравнению со слегка расстроенным квадроциклом, который управляем и держится на плаву 2+мин. Он утверждает, что этот двигатель был разработан с некоторыми замечательными характеристиками, разработанными специально для легкого гоночного квадроцикла на 5S или 6S. Это может быть легкий двигатель, но его долговечность всегда ставится под сомнение.
Он утверждает, что этот двигатель был разработан с некоторыми замечательными характеристиками, разработанными специально для легкого гоночного квадроцикла на 5S или 6S. Это может быть легкий двигатель, но его долговечность всегда ставится под сомнение.
iFlight Xing2 2306 | Emax Eco II 2207 | T-Motor F60 Pro V | |
|---|---|---|---|
KV Options | 1700KV, 1900KV, 2400KV | 1700KV, 1800KV, 1900KV, 2450KV, 2750KV | 1750KV, 1950KV, 2550KV |
Lipo Voltage | 3-6S | 2-6S | 4-6S |
Watts | 1700KV- 960W | 1700KV- 778W | 1750KV- 940W |
Weight (g) | 31. | 34.6g | 32.5g |
 6g
6gALSO READ:
Brushless Motor Kv Rating Explained
Quadcopter Motor and Propeller Rotation
The Basics of brushless motor
Бесщеточный двигатель состоит из двух основных частей, называемых статором и ротором. Изображение показано ниже для справки.
Статор – неподвижная часть двигателя (обмотки), а ротор – вращающаяся часть двигателя (колокол с магнитами). Также есть много других мелких вещей, таких как подшипники, катушки, магниты, валы и т. д.
Размер двигателя основан на размере статора (диаметр и высота). Например, если размер двигателя равен 2207, это означает, что статор имеет ширину 22 мм и высоту статора 07 мм.
Также есть нечто, называемое KV мотора. Это означает, что теоретически скорость, с которой вращается двигатель, зависит от каждого вольта, приложенного к двигателю.
Соотношение тяги к массе
Бесщеточные двигатели бывают всех форм и размеров. Общее эмпирическое правило заключается в том, чтобы стремиться к соотношению тяги к весу 2:1. Вы не сможете участвовать в жестких гонках с ним. Очевидно, что чем выше, тем лучше. Отношение тяги к весу зависит в основном от размера самих квадроциклов.
Существуют готовые квадроциклы, такие как Diatone Crusader GT, у которых отношение тяги к массе составляет 8:1. Есть люди, которые добились 13:1. Но есть определенные ограничения для двигателей, потому что они могут вращаться только с такой скоростью, а вращение их еще быстрее делает их неэффективными.
Даже для установки для фотосъемки вы должны ориентироваться как минимум на 3 или 4:1 на тот случай, если вы решите обновить свою установку в будущем или добавить HD-камеру или большую батарею для более длительного времени полета или что-то в этом роде, тогда у вас будет некоторая резервная мощность, оставшаяся для компенсации.
Для новичка в гонках на дронах оптимальной будет тяга 4 или 5:1. Если у вас ограниченный бюджет, соберите чудовищный квадроцикл и ограничьте пределом газа на Betaflight или передатчике.
Счетверенные размеры двигателей — более высокие и широкие статоры
Двигатель обозначается набором из 4 цифр, таких как 2207 или 2306, или любым другим. Обозначает диаметр и высоту ротора в миллиметрах (мм). Чем больше двигатель, тем выше тяга, которую он создает.
- Более высокий статор = более высокая максимальная скорость и ужасная управляемость на низких скоростях
- Более широкий статор = более низкая максимальная скорость и лучшая управляемость на более низких скоростях
Основной причиной является усиление магнитного поля статоров. Более высокие статоры имеют большие магниты по сравнению с меньшими и более широкими статорами.
Двигатели 2207 и 2306
Хорошим сравнением будет типичное сравнение двигателей 2207 и 2306. Это широко обсуждаемая тема относительно того, что лучше, и одно нельзя рекомендовать другому, поскольку оба имеют свои преимущества и недостатки, которые будут рассмотрены в другой статье.
Это широко обсуждаемая тема относительно того, что лучше, и одно нельзя рекомендовать другому, поскольку оба имеют свои преимущества и недостатки, которые будут рассмотрены в другой статье.
Таблица размеров бесщеточного двигателя
Выбор двигателя зависит от того, насколько большой вы хотите построить свой квадроцикл. Отсюда и название Размер рамы = Размер двигателя.
Определив размер рамы, мы можем определить, насколько большой двигатель мы должны использовать.
Размер рамы также ограничивает размер пропеллера, и каждый пропеллер требует отдельного двигателя для его вращения и эффективного создания тяги.
Также KV двигателя играет важную роль при выборе двигателя. Как упоминалось ранее, чем выше KV, тем больше ток.
The table below shows the nominal frames and quadcopter motor numbers:
Frame Size | Prop Size | Motor Size | KV |
|---|---|---|---|
150mm and smaller | 3″ and smaller | 1105-1306 | 3000 and higher |
180mm | 4″ | 1806 | 2600-3000 |
210mm | 5″ | 2204-2208/2306 | 2600-3000 |
250mm | 6″ | 2205-2208/2306 | 2000-2300 |
300mm | 7″ | 2208/2212 | 1600 |
Коэффициенты производительности
кВ — константа скорости
Теоретически теоретически RC Bridse Motor -Rating представляет на машины, на что на автомобильные применения на машины, на которые нахождение, на которые нахождение гневает на наезжи, на которые нахожут на машине. Например, если двигатель 2300 кВ с аккумуляторным двигателем 3S для квадрокоптера, подключенным к его концам, то двигатель будет вращаться со скоростью 2600×12,60 = 32 760 об / мин (обороты в минуту — количество оборотов в минуту) без пропеллеров. Скорость вращения постепенно снижается из-за сопротивления воздуха.
Например, если двигатель 2300 кВ с аккумуляторным двигателем 3S для квадрокоптера, подключенным к его концам, то двигатель будет вращаться со скоростью 2600×12,60 = 32 760 об / мин (обороты в минуту — количество оборотов в минуту) без пропеллеров. Скорость вращения постепенно снижается из-за сопротивления воздуха.
Motor KV представляет собой скорость, с которой вращается двигатель на каждый вольт, приложенный к двигателю.
Более высокое значение KV означает более низкое сопротивление, более высокое потребление тока и более низкий КПД. Меньшее значение KV означает более высокое сопротивление и меньшее потребление тока, а также значительно лучшую эффективность.
Если вы начинаете, желательно около 2300-2400 кВ.
Например, если двигатель рассчитан на 2300 кВ с напряжением батареи 3 с, то двигатель будет вращаться при 2300×12,60 = 28,980 об/мин без пропеллеров, и это максимальные обороты, которых он может достичь без нагрузки.
Скорость вращения резко снижается при установке гребного винта из-за сопротивления воздуха, оказываемого двигателю при вращении гребного винта.
Related Posts
Крутящий момент
Переходим к следующему фактору, который приходит на ум, это крутящий момент, создаваемый двигателем. Крутящий момент — это сила вращения или сила вращения, которая вращает пропеллер. Это не имеет большого значения, если вы начинаете.
На крутящий момент двигателя влияют такие факторы, как:
1. Размер статора – чем больше статор, тем выше крутящий момент
2. Материалы, такие как качество магнитов и медных обмоток в роторе
3. Факторы конструкции двигателя, такие как воздух зазоры между статором и ротором.
Крутящий момент двигателя значительно влияет на производительность квадроцикла. Это также определяет, как коптер будет реагировать на входные данные. Чем выше крутящий момент, создаваемый двигателем, тем более отзывчивым будет квадроцикл.
Крутящий момент также определяет, насколько быстро квадроцикл меняет направление в полете, что очень помогает делать более крутые повороты в гонке. Относительно, если двигатель производит меньший крутящий момент и оснащен более тяжелыми винтами, двигатель не может вращать винт, что приводит к снижению эффективности и тяги. Потребляемый ток в двигателе с чрезмерной опорой будет значительно выше.
Относительно, если двигатель производит меньший крутящий момент и оснащен более тяжелыми винтами, двигатель не может вращать винт, что приводит к снижению эффективности и тяги. Потребляемый ток в двигателе с чрезмерной опорой будет значительно выше.
Одним из основных недостатков двигателей с высоким крутящим моментом является то, что, несмотря на то, что они кажутся более быстрыми и чувствительными к элементам управления, у них плохие колебания. Поскольку двигатели с высоким крутящим моментом способны быстрее изменять обороты, они фактически усиливают ошибку (колебания).
В Betaflight трудно избавиться от осцилляции даже с настройкой PID, особенно по оси рыскания коптера.
Эффективность
Эффективность двигателя рассчитывается путем деления тяги, создаваемой двигателем при 100% дроссельной заслонке, на мощность, производимую двигателем.
Измеряется в граммах на ватт (г/Вт). Чем выше это отношение, тем эффективнее двигатель. Мы не собираемся все время летать на 100% дроссельной заслонке; поэтому важно учитывать КПД двигателя во всем диапазоне дроссельной заслонки от 0% до 100% дроссельной заслонки.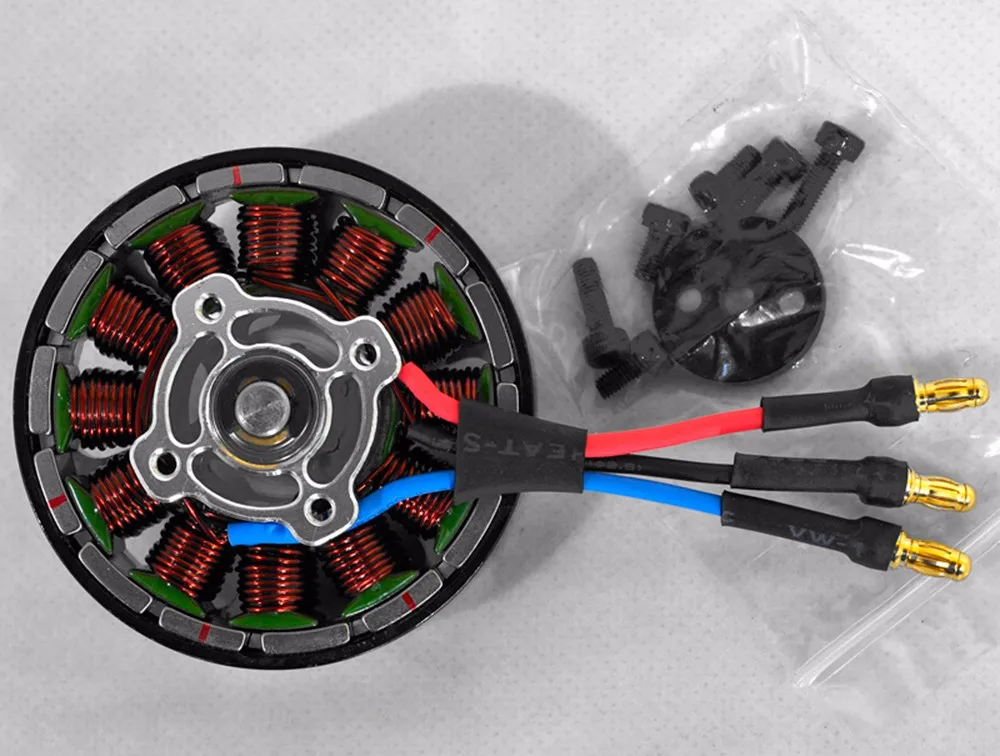
Некоторые двигатели могут быть эффективнее в нижней части кривой дроссельной заслонки, а некоторые двигатели могут быть более эффективными в верхней части кривой дроссельной заслонки. Поэтому важно выбрать правильный мотор в зависимости от стиля вашего полета.
Потребляемый ток
Ток, потребляемый двигателем, важен, потому что он помогает нам определить размер регулятора квадрокоптера, необходимый для этого конкретного двигателя.
Например, двигатель 1104 потребляет не более 10 А при 100 % дроссельной заслонки, тогда как некоторые двигатели 2306 потребляют не более 40 А при 100 % дроссельной заслонке. esc должен быть выбран соответственно для номинального значения, на 20 % превышающего ток, потребляемый двигателем при 100 %.
То есть; если двигатель потребляет максимум 30 А при 100% дроссельной заслонке, идеальным вариантом будет регулятор, рассчитанный на постоянный ток 36 А.
Также известен как взрывной рейтинг esc. Это максимальный ток, который esc может выдержать в течение короткого периода времени, не повреждая себя.
Температура
Температура или нагрев в целом губительны для двигателей с течением времени. Если двигатели подвергаются длительному нагреву, магниты в роторе со временем теряют свою напряженность магнитного поля. Они со временем размагничиваются под воздействием постоянного тепла, что приводит к сокращению срока службы двигателя.
Основными причинами нагрева двигателя являются чрезмерная пропорка и использование более высоких дросселей в течение длительного периода времени. Если вы профессиональный гонщик на дронах, вы будете работать с более высокими дросселями, но если вы только начинаете, и двигатель нагревается, значит, двигатель перегружен.
Но производители двигателей компенсируют эту проблему, разрабатывая охлаждающие ребра, которые помогают двигателю всасывать воздух в двигатель и охлаждать себя, что соответствует увеличению срока службы, при условии, что вы не разобьетесь и не разрушите двигатель заранее.
Другие факторы, которые следует учитывать
Номера N и P
Типичный двигатель 22xx или 23xx будет иметь 12 полюсов и 14 магнитов. Этот номер будет обозначаться примерно как 12П14Н. Как показано на схеме, полюса присутствуют на статоре, а постоянные магниты находятся на роторе двигателя.
Этот номер будет обозначаться примерно как 12П14Н. Как показано на схеме, полюса присутствуют на статоре, а постоянные магниты находятся на роторе двигателя.
Одножильный и многожильный провод
Одножильный провод, как следует из названия, состоит из одного медного провода, тогда как многожильный провод состоит из 3 меньших проводов для замены одного более толстого провода. Одножильные провода толще и намного лучше справляются с выделением тепла при использовании в высоковольтных конструкциях.
Многожильные провода легко рвутся или плавятся при более высоких рабочих температурах. Как правило, многожильные провода более эффективны, потому что они упаковывают провода намного плотнее и ближе друг к другу, что создает более сильные магнитные поля и приводит к более мощным двигателям.
Магниты
Магниты в двигателе играют важную роль в определении того, насколько мощным будет двигатель.
У дешевых двигателей более слабые магниты и меньшая тяга по сравнению с дорогими двигателями с более мощными магнитами.
Некоторые двигатели более высокого класса даже имеют изогнутые магниты, повторяющие форму ротора.
Магниты, используемые в бесщеточных двигателях, классифицируются по магнитной силе, такой как N52, N54 и т. д., чем выше, тем сильнее магнитное поле, создаваемое магнитами.
Обмотки двигателя
Другим фактором, который следует учитывать, является качество обмоток двигателя. Если двигатель имеет высококачественные медные обмотки, они будут оказывать меньшее сопротивление потоку тока и, таким образом, обеспечивать более высокую эффективность и более длительное время полета.
Вес двигателя
Вес двигателя зависит от размера и материалов двигателя. Чем больше мотор, тем он тяжелее. Имея в виду, что двигатели, используемые на 5-дюймовом квадроцикле, обычно весят около 30-40 граммов с проводами. Есть несколько очень легких двигателей, таких как Emax RSII, которые весят около 25 граммов для двигателя 2306 с парой граммов для проводов.
Есть несколько очень тяжелых двигателей, например, двигатели Cobra 2204, которые весят около 34 граммов. Как говорится, каждый грамм на счету, особенно с моторами. Почему? Поскольку плечо момента увеличивается, чем тяжелее становится двигатель. Проще говоря, для поворота квадрицепса требуется значительное усилие с увеличением на каждый грамм.
Но это не значит, что легче — лучше. Более легкие двигатели не так долговечны, как более тяжелые, потому что они должны быть сделаны из более легких материалов для уменьшения веса. Следовательно, все сводится к тому, для чего вы собираетесь использовать двигатель.
Схемы крепления мотора
Схемы крепления мотора также имеют значение, потому что они должны быть совместимы со всеми рамами, в которые вы хотите установить мотор. Большинство 5-дюймовых квадроциклов в наши дни используют моторы размеров от 2205 до 2407.
Все моторы имеют либо (16х16) мм, либо (16х19) мм.) монтажные схемы мм. Все современные рамы поддерживают все эти схемы крепления, и это не должно вызывать особых опасений.
На изображении выше показан бесколлекторный двигатель в квадроцикле. Отверстия для винтов будут присутствовать на статоре двигателя. Показанный выше двигатель или статор имеет монтажную схему 16×19 мм и использует 4 винта м3 для крепления двигателя к раме.
ЧИТАЙТЕ ТАКЖЕ:
Как перемотать бесколлекторный двигатель
Особенности двигателей
Вал двигателя
В современных двигателях используются полые валы, а не сплошные валы, что позволяет уменьшить вес двигателя. В этом есть свои положительные и отрицательные стороны.
Полые валы, очевидно, уменьшают вес двигателя, но они менее долговечны при авариях.
Нельзя заменить валы без замены всего ротора двигателя. Для строителей с ограниченным бюджетом полые валы — это плохо, но для тех, кто хочет сэкономить каждый грамм, полые валы — это то, что нужно.
Воздушный зазор
Другим важным фактором повышения производительности двигателя является воздушный зазор между статором и ротором. Чем ближе ротор к статору (магниты к обмоткам), тем эффективнее он преобразует ток. Чем меньше воздушный зазор, тем выше тяга, создаваемая двигателем, поскольку статор лучше пересекает магнитные поля.
Чем ближе ротор к статору (магниты к обмоткам), тем эффективнее он преобразует ток. Чем меньше воздушный зазор, тем выше тяга, создаваемая двигателем, поскольку статор лучше пересекает магнитные поля.
Провода двигателя
Следующим фактором, влияющим на работу двигателя, является сечение провода двигателя. Двигатели используют либо 20 Awg, либо 18 Awg (американский калибр проволоки). В серии Emax RS утверждается, что переход с провода калибра 22 на провод калибра 20 увеличил выходную мощность на 5%. Но в этом нет ничего страшного при покупке мотора и начале работы в хобби.
Стопорные зажимы
Следующее, о чем мы собираемся поговорить, это фиксирующие зажимы или способы крепления статора и ротора. Есть в основном 3 типа, которые мы используем в нашем хобби.
- E-зажим
- C-зажим
- Винтовые фиксаторы
Каждый из них имеет свои преимущества и недостатки.
Например: Зажимы E трудно снять, не сломав сам зажим. Винтовые фиксаторы легко снимаются и, следовательно, обеспечивают легкий доступ к статору и ротору.
Винтовые фиксаторы легко снимаются и, следовательно, обеспечивают легкий доступ к статору и ротору.
Но винтовые фиксаторы со временем отвинчиваются и ослабевают из-за постоянной вибрации двигателя, а также могут привести к чрезмерному затягиванию вала и затруднению вращения двигателя. Нельзя рекомендовать один клип вместо другого. Все зависит от того, для чего двигатель будет использоваться и его области применения.
Двигатели по часовой стрелке против часовой стрелки
Существует 2 типа двигателей — двигатели вращения по часовой стрелке (CW) и против часовой стрелки (CCW). Они различаются только направлением вращения, а остальные конструктивные параметры двигателя одинаковы. На приведенной ниже диаграмме показано расположение двигателей для четырехугольного, шестигранного и восьмицилиндрового дрона. Можно сделать вывод, что моторы противоположной стороны вращаются в одном направлении. То же самое и в гексагональных и окта-дронах.
Двигатели с голым дном ИЛИ Двигатели с закрытым дном
Последней тенденцией в квадроциклах являются двигатели с голым дном. Они значительно экономят вес (в целом 2 г), может показаться, что это немного, но это много с точки зрения гонок на дронах. Это может быть разница между победой в гонке или поражением.
Они значительно экономят вес (в целом 2 г), может показаться, что это немного, но это много с точки зрения гонок на дронах. Это может быть разница между победой в гонке или поражением.
Это плюсы моторов с голым дном, есть и минусы у моторов такого типа.
Во-первых, во время аварии мелкие камни и мусор могут попасть внутрь колокола и повредить магниты и катушки. Даже профессиональные гонщики часто разбиваются, поэтому новичкам лучше купить моторы с закрытым днищем, когда они начинают заниматься хобби, потому что они больше подвержены авариям. На нижеприведенных фотографиях изображены моторы с голым и закрытым днищем.
Заключение
В этой статье мы попытались охватить большинство основных аспектов бесколлекторного двигателя для квадроцикла. В будущем он будет изменен с некоторыми изменениями по мере необходимости. Есть так много вариантов на выбор, и мы подумали, что это должно быть рассмотрено в другой статье. Мы надеемся, что эта статья хоть как-то помогла вам получить базовые знания о FPV. Спасибо за прочтение, если вы дочитали до конца.
Спасибо за прочтение, если вы дочитали до конца.
Похожие сообщения
Бесколлекторные двигатели постоянного тока — мощность ниже 900 Вт
- Специальные оборонные двигатели
- Бесщеточные двигатели постоянного тока — мощность менее 900 Вт
- Серводвигатели — мощность ниже 70 кВт
- Щеточные двигатели
- Двигатели со встроенной электроникой привода
- Суровая и опасная среда
- Устаревшие продукты
Moog предлагает широкий выбор высокопроизводительных бесщеточных двигателей и серводвигателей, используемых в самых разных областях, включая медицину, автоматизацию офиса, упаковку, промышленность, авиакосмическую промышленность и оборону.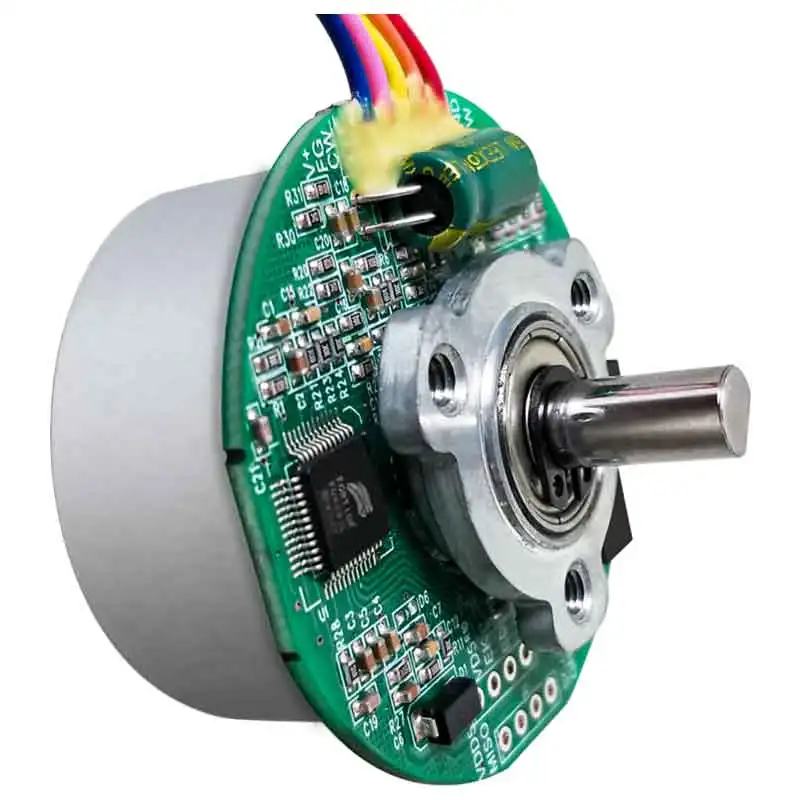
- Бесщеточные двигатели постоянного тока с внутренним ротором — серия глушителей®
- Бесщеточные моментные двигатели постоянного тока с прямым приводом
- Двигатели ограниченного вращения
- Бесщеточные двигатели постоянного тока с тороидальной обмоткой
Встроенные двигатели
Компания Moog расширила свои решения для перемещения, добавив линейку встроенных двигателей с широкими возможностями программирования.
Moog Animatics предлагает передовые технологии, объединяющие двигатель, энкодер, усилитель, контроллер, средства связи RS232/RS485 и устройства ввода-вывода. Теперь SmartMotor оснащен опциональной технологией Combitronic.
Узнать больше
Сервоуправление встроено в высокоэффективный бесщеточный двигатель. Обеспечивает большую свободу проектирования машин и значительно сокращает пространство для проводки и шкафа.
Узнать больше
Заказные двигатели
Компания Moog расширила свою линейку высокопроизводительных бесщеточных двигателей, включая бесщеточные двигатели с постоянными магнитами, интенсивные элементы управления DSP и дополнительные компоненты. Эти индивидуальные решения обеспечивают конкурентное преимущество как по характеристикам, так и по стоимости для широкого спектра приложений и рынков.
Moog Aspen решает проблемы управления движением OEM, используя свои инженерные возможности для разработки и производства инновационных продуктов, включая бесщеточные двигатели с постоянными магнитами, интенсивные элементы управления DSP и компоненты с добавленной стоимостью. Эти индивидуальные решения обеспечивают конкурентное преимущество как по характеристикам, так и по стоимости для широкого спектра приложений и рынков.
Узнать больше
Moog Aspen тесно сотрудничает с нашими крупными OEM-клиентами, чтобы предложить «больше, чем просто двигатель».