
Как работает бесколлекторный двигатель постоянного тока
Добавлено 16 июля 2019 в 22:15
Сохранить или поделиться
Узнайте обо всех достоинствах бесколлекторных двигателей, а также о преимуществах и недостатках выбора этого типа двигателей для вашего проекта.
Если вы работаете над проектом, в котором есть движущаяся часть, вы, вероятно, будете искать двигатель, чтобы сделать это движение возможным. В этой серии статей мы рассмотрим наиболее популярные типы двигателей, которые используют разработчики. Сначала мы рассмотрели коллекторные двигатели постоянного тока. Теперь давайте посмотрим на их ближайший аналог: бесколлекторный двигатель постоянного тока.
Чтобы узнать, для каких проектов лучше всего подходят бесколлекторные двигатели постоянного тока, ознакомьтесь с обзором:
Обзор бесколлекторных двигателей постоянного тока
Бесколлекторные двигатели – это новая технология двигателей, быстро внедряемая в высокотехнологичных приборах и электромобилях (например, Tesla Model S) в качестве замены коллекторных двигателей постоянного тока. Они также чрезвычайно распространены в любительских летательных аппаратах, включая многомоторные. Поскольку бесколлекторные двигатели постоянного тока не имеют коллектора и щеток (что очевидно), они работают без многих ограничений коллекторных двигателей постоянного тока.
 Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективности
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективностиКак они работают?
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективности.
 Оценка характеристик бесколлекторных двигателей
Оценка характеристик бесколлекторных двигателейКак и коллекторные двигатели постоянного тока, бесколлекторные двигатели работают путем изменения полярности обмоток внутри двигателя. Магнитные поля, создаваемые при возбуждении обмоток, оказывают толкающее воздействие на постоянные магниты, расположенные вокруг внешнего корпуса.
На бесколлекторном двигателе постоянного тока вращается не вал двигателя, а внешний корпус. Поскольку центральный вал, к которому прикреплены обмотки, является неподвижным, питание может подаваться непосредственно на обмотки, что устраняет необходимость в щетках и коллекторе.
Без щеток бесколлекторные двигатели изнашиваются намного менее быстро, чем коллекторные двигатели постоянного тока. Они работают с гораздо меньшим звуковым и электрическим шумом и способны работать на гораздо более высоких скоростях.
 Из чего состоит бесколлекторный двигатель постоянного тока
Из чего состоит бесколлекторный двигатель постоянного токаБесколлекторные двигатели постоянного тока только недавно начали использоваться в потребительских товарах и любительских проектах, потому что их сложно контролировать.
В то время как коллекторные двигатели постоянного тока для изменения полярности обмоток используют просто вращение самого двигателя, бесколлекторные двигатели постоянного тока управляются активно и требуют сложной схемы управления обмоткой, которая также должна масштабироваться при увеличении скорости.
Только благодаря тому, что микроконтроллеры стали дешевле и доступнее, стало возможным, чтобы недорогие системы могли удерживать правильную частоту вращения, необходимую для работы двигателя.
Достоинства бесколлекторных двигателей постоянного тока
Низкий износ
Единственным физическим интерфейсом между вращающейся внешней стороной корпуса двигателя и стационарными обмотками внутри являются шарикоподшипники, что означает, что бесколлекторные двигатели постоянного тока изнашиваются очень медленно.
Высокая скорость
Бесколлекторные двигатели имеют намного меньшее трение, чем коллекторные двигатели постоянного тока, поэтому они могут работать на более высоких скоростях.
Высокая эффективность
По сравнению с другими типами двигателей бесколлекторные двигатели обладают очень высокой эффективностью работы, что означает более низкое энергопотребление при той же выходной мощности по сравнению с коллекторными двигателями постоянного тока.
Недостатки бесколлекторных двигателей постоянного тока
Очень высокая сложность управления
Бесколлекторные двигатели постоянного тока для правильной работы требуют специализированных контроллеров и сложных алгоритмов управления.
Высокая цена
Стоимость самих двигателей не слишком высока, но когда добавляется стоимость контроллера, общая стоимость использования бесколлекторного двигателя постоянного тока в проекте становится относительно высокой.
Необходимость специализированных передач
В таких приложениях, как вакуумные пылесосы Dyson, бесколлекторные двигатели постоянного тока должны быть снабжены передачей для преобразования высоких скоростей до нужной скорости.
Оригинал статьи:
Теги
Бесколлекторный двигательДвигательЭлектродвигательСохранить или поделиться
Бесколлекторные двигатели | Stepmotor
Преимущества бесколлекторных двигателей
Все БД имеют высокий срок службы механических элементов. Достигнуть этого позволила ось, зафиксированная на шарикоподшипниках, исключившая из конструкции какие-либо трущийся друг об друга элементы.
Размагничивание магнитов в бесколлекторных двигателях происходит крайне медленно и составляет не более 1% в 10 лет. Таким образом вывести силовую остановку из строя можно только при перепаде напряжения в контроллере. Избежать данного развития событий позволяет защита по току в контроллере.
1. Долгий срок службы
Высокий срок службы силовой установки данного типа обусловлен неизменным режимом работы на высокой скорости. Кроме того отсутствие какого-либо трения деталей, а следовательно и отсутствие стачивания и нарушения механизмов работы положительно влияют на работу силовой установки бесколлекторного типа.
Срок работы бесколлекторный двигателей различного типа составляет от 20,000 часов. Чем точнее будет первичная настройка и аккуратнее его использование, тем дольше двигатель будет использоваться. Единственными элементами, ограничивающим ресурс бесколлекторного электродвигателя, являются подшипники.
3. Повышенное быстродействие, динамичность
4. Высокая точность позиционирования
5. Низкие перегревы при перегрузках
6. Пониженный уровень электромагнитных шумов
7. Высокая перегрузочная способность по моменту
8. Возможность изменения частоты вращения в широком диапазоне
9. Линейные загрузочные характеристики
Недостатки: управление бесколлекторным двигателем
Управление бесколлекторным двигателем обуществляет специальный электронный блок управления, который также называют регулятором. Он позволяет осуществлять управление оборотами двигателя, подавать напряжение и настроить вращение силовой установки.
Как правило, именно регулятор бесколлекторного двигателя «забирает» на себя основную стоимость силовой установки. Однако без электронного блока управления настроить и запустить двигатель, так же как и запрограммировать управление бесколлекторным двигателем невозможно. Именно электронное оборудование подает постоянное напряжение на определенные обмотки статора. Также значительно как электронный регулятор на стоимость БД влияют и неодимовые магниты, использующиеся в конструкции установки.
Бесколлекторные двигатели имеют достаточно сложную конструкцию, поэтому любой БД, в том числе трехфазовый (наиболее часто использующийся в производстве), имеет сложный процесс управления.
Устройство БД
В зависимости от месторасположения магнитов в силовой установке существует два типа электродвигателей: «Инраннер» — с магнитами, расположенными во внутренней части, и «Аутраннер» — с магнитами во внешней части, которые вращаются во внешней плоскости статора и обмотки.
В зависимости от требующихся характеристик в электродвигателе применяется одна или другая схема бесколлекторного двигателя. Если у двигателя малое количество полюсов и высокие обороты, то используют схему работы «Инраннер». В этом типе схемы электродвигатель одновременно выполняет функцию корпуса: поэтому непосредственно на него могут быть зафиксированы крепежные элементы.
В съеме бесколлекторного двигателя «Аутраннер» предполагаются невысокие обороты и высокий момент. Вращение в конструкции осуществляет внешняя часть. Закрепить данный тип электродвигателя можно при помощи деталей статора или за незадействованную во вращении осевую часть.
Фазы бесколлекторных двигателей
Фаза бесколлекторного двигателя обеспечивает плавность вращения магнитного поля, чем больше фаз — она же является обмоткой электродвигателя — тем более плавно осуществляется вращение. Как правило, используются трехфазовые бесколлекторные двигатели, однако существуют и одно- и двух- и четырехфазовые силовые установки. Чем больше обмотки — тем выше сложность, но и лучше показатель эффективности.
Распространенность трехфазовых электродвигателей обусловлена соотношением их эффективности к значению сложности. Обычные трехфазовые бесколлекторные двигатели имеют три провода, если же это электродвигатель с датчиками положения, то для них используется еще один комплект состоящий из пяти проводов.
Напряжение подается на две обмотки из трех, тем самым создается шесть путей подачи напряжения на обмотки. Шаг поворота составляет 60 градусов.
Бесколлекторные двигатели с датчиками положения
Если в конструкции используются нагрузки на валу установки, то следует использовать двигатель с датчиком положения. Все электродвигатели в области подъемных механизмов, а также в электротранспорте должны быть оснащены датчиками положения.
Стоит помнить, что если в конструкции при старте должны быть полностью исключены колебания оси двигателя (вращения), то обойтись без датчиков положения в силовой установке не удастся. Наиболее распространенными датчиками движения в электродвигателе являются датчики, работа которых основана на эффекте Холла. Расположение датчиков должно способствовать воздействию магнитов ротора, угол между датчиками составляет 120 градусов (электро).
Датчики положения могут быть расположены как внутри так и снаружи силовой установки. Это позволяет в некоторых случаях самостоятельно дооснастить бесколлекторные электродвигатели без встроенных датчиков положения дополнительно этими внешними датчиками.
В некоторых случаях требуется чтобы датчики работали в режиме реверса, т.е. вращались в обратном направлении, для этого следует использовать дополнительный комплект датчиков перемещения. Чтобы они заработали в режиме реверса следует настроить их на обратный ход.
Применение бесколлекторных электродвигателей
Основным преимуществом БД является отсутствие нагрева и шума во время работы и это при высокой производительности. В первую очередь бесколлекторные двигателя используются в медицинском оборудовании. Большинство современного стоматологического оборудования работает именно с помощью бесколлекторный электродвигателей, поскольку в этой области возможно использовать только тихие высокопроизводительные электромоторы без нагрева.
Наружная реклама: рекламные щиты, витрины, банеры-жалюзи с изменяющимися изображениями используют в своей конструкции бесколлекторные двигатели. В этом случае БД применяются для автоматической работы банеров и вращения конструкций.
Электронное автомобильное оборудование также не обходится без бесколлекторных двигателей. Электростеклоподъемники, «дворники» или электростеклоочистители, омыватели фар и электрорегуляторы кресел также работают при помощи БД.
Отдельно отметим нефтегазовую промышленность, в которой силовые элементы в запорном оборудовании не могут обойтись без БД, поскольку только они гарантированно не имеют искрообразующие части, использовать которые категорически запрещено в данном типе производства.
Купить бесколлектроные двигатели
Мы делаем производство простым в управлении и надежным! Бесколлекторные двигатели подходят как для автоматизации крупных производств, так и любителей электроуправляемых моделей, собрать которые можно в домашних условиях.
Наш Торговый Дом занимается розничными и оптовыми продажами мотор редукторов, шаговых двигателей, линейных двигателей, цилиндрических мотор редукторов, а также бесколлекторных двигателей. Мы осуществляем полный цикл продажи от первичной консультации по требующемуся оборудованию до ее внедрения и установки на вашем производстве.
Мы всегда готовы предоставить вам бесплатную подробную консультацию по новинкам, появившимся на рынках мира, и подобрать для вас подходящий вариант силовой установки или другого оборудования. Мы работаем с самыми крупными поставщиками из Азии, Европы и СНГ, поэтому предлагаем для вас самые доступные цены на силовое оборудование.
Если вы хотите купить бесколлекторный двигатель для робототехники или автоматического управления, то можете оставить запрос на сайте Торгового Дома «Степмотор» или связаться с нами по бесплатному номеру телефона по России: 8 800 5555 068.
Бесколлекторные двигатели — Паркфлаер
Немного из истории:Главная проблема всех двигателей – это перегревание. Ротор вращался внутри какого-нибудь статора, и поэтому тепло от перегрева никуда не уходило. Людям пришла в голову гениальная идея: вращать не ротор, а статор, который при вращении охлаждался бы воздухом. Когда создали такой двигатель, он стал широко использоваться в авиации и судостроении, и поэтому его прозвали Вентильным двигателем.
Вскоре был создан электрический аналог вентильного двигателя. Назвали его бесколлекторным мотором, потому что у него не было коллекторов (щеток).
По конструкции бесколлекторные моторы делятся на две группы: inrunner (произносится как «инраннер») и outrunner (произносится как «аутраннер»). Двигатели первой группы имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели второй группы — «аутраннеры», имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами. Количество полюсов магнитов, используемых в бесколлекторных двигателях, может быть разным. По количеству полюсов можно судить о крутящем моменте и оборотах и двигателя. Моторы с двухполюсными роторами имеют наибольшую скорость вращения при наименьшем крутящем моменте.
Принцип работы.
В отличие от щёточного электродвигателя постоянного тока, коммутация в бесколлекторном двигателе (БД) осуществляется и контролируется с помощью электроники. Принцип работы БД основан на том, что контроллер БД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был под углом 120 градусов к вектору магнитного поля ротора.
(на катринке статор перепутан с ротором)
Электрическая машина состоит из неподвижной части — статора и подвижной части — ротора.
Применение.
Данный тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока.
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Создание бесколлекторного двигателя (1):
Однажды я уже писал про создание бесколлекторного двигателя из старого колекторного двигателя: http://www.parkflyer.ru/blogs/view_entry/598/
Испытания показали:
Тяга с винтом 8х6 = 533 грамма,
Частота вращения = 5433 об/мин,
Потребляемая мощность = 120 ватт (это только при холостом ходу!), а с винтом вообще 330 ватт. Это очень плохие показатели, и поэтому было решено создать новый с улучшенными характеристиками бесколлекторный двигатель. (его КПД = 23%)
Создание бесколлекторного двигателя (2):
На самом деле нельзя утверждать, что новый двигатель полностью создан мною, т.к. сделан он из старого, сломанного и сгоревшего бесколлекторного двигателя, можно сказать, что он восстановлен (починен и перемотан системой треугольника). Отличается он от первого тем, что у него вместо 3 зубьев 12, другая система обмотки и более правильная конструкция с использованием подшипников.
О том как перематывать двигатели я вам рассказывать не буду, а просто дам ссылку об этом: http://rc-aviation.ru/mtech/735-remont/1176-peremotka-dvigatelya, а также дам вам совет перематывайте не одной проволкой, а косичкой из нескольких, более тонких проволок.
Испытания показали:
Тяга с винтом 8х6 = 754 грамма,
Частота вращения = 11550 об/мин,
Потребляемая мощность = 9 ватт (без винта), 101 ватт (с винтом),
Мощность и КПД
Мощность можно вычислить вот таким способом:
1) Мощность в механике вычисляется по такой формуле: N= F*v, где F — сила, а v — скорость. Но так как, винт находится в статическом состояние, то движения нет, кроме вращательного. Если этот мотор установить на авиамодель, то можно было бы замерить скорость (она равна 12 м/с) и посчитать полезную мощность:
N полез= 7.54*12= 90.48 ватт
2) КПД электрического двигателя находится по такой формуле: КПД= N полезной/N затраченной *100%, где N затрат= 101 ватт
КПД= 90.48/101 *100%= 90%
В среднем КПД бесколлекторных двигателей реально и колеблется около 90% (самый большой КПД достигнутый данным видом моторов равен 99.68%)
Характеристики двигателя:
Напряжение: 11.1 вольт
Обороты: 11550 об/мин
Максимальная сила тока: 15А
Мощность: 200 ватт
Тяга: 754 грамм (винт 8х6)
Заключение:
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Бесколлекторный мотор GoolRC типоразмера 3660 для настольной сверлилки
Нестандартное использование бесколлекторного мотора, в любительских целях.Мотор 3660 мощный, позволяет устанавливать патроны на вал 5 мм.
Профильное назначение — двигатель для р/у машинок и прочей техники в масштабе 1:10, 1:8.
За подробностями под кат
Приветствую!
Сегодня будет немного рукоблудства на тему необычного использования модельных двигателей.
Содержание и быстрая навигация по тексту:
Введение и общая информация
Характеристики комплекта
Посылка, упаковка, комплект поставки
Внешний вид двигателя GoolRC 3660
Внешний вид ESC контроллера
Внешний вид сервомашинки
Использование и способ подключения
Заключение
Введение и общая информация
Наверх ▲
Бесколлекторный (или вентильный) двигатель — это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора. Иногда можно встретить такую аббревиатуру: BLDС — это brushless DC motor. Для простоты буду называть его двигатель-бесколлекторник или просто БК.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов). Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей.
Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя.
Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений. Это так называемые ESC контроллеры.
БК моторы для р/у техники бывают различных типоразмеров и исполнения. Одни из самых мощных это серии 22 мм, 36 мм и 40/42 мм. По конструкции они бывают с внешним ротором и внутренним (Outrunner, Inrunner). Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Двигатели с внешним статором проще сделать герметичными. Подобные применяют для р/у моделей, которые подвергаются внешним воздействиям тип грязи, пыли, влаги: багги, монстры, краулеры, водные р/у модели).
Например, двигатель типа 3660 можно запросто установить в р/у модель автомобиля типа багги или монстра и получить массу удовольствия.
Также отмечу различную компоновку самого статора: двигатели 3660 имеют 12 катушек, соединенных в три группы.
Это позволяет получить высокий момент на валу. Выглядит это примерно так.
Соединены катушки примерно вот так
Если разобрать двигатель и извлечь ротор, то можно увидеть катушки статора.
Вот что внутри 3660 серии
еще фото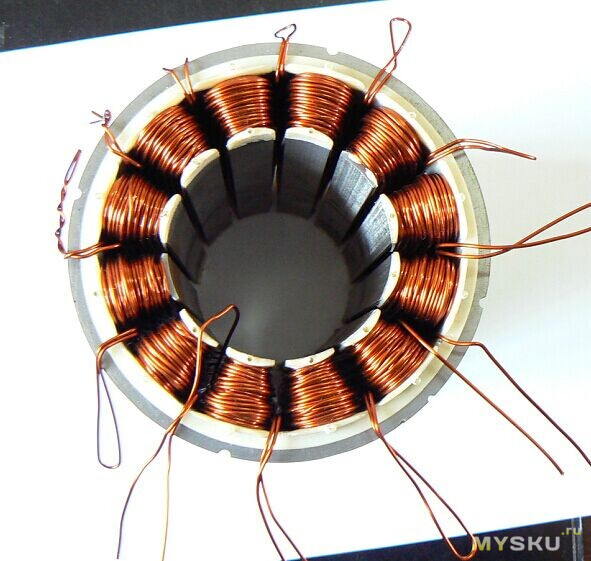
Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером
GoolRC 3660 3800KV Brushless Motor with ESC 60A Metal Gear Servo 9.0kg Set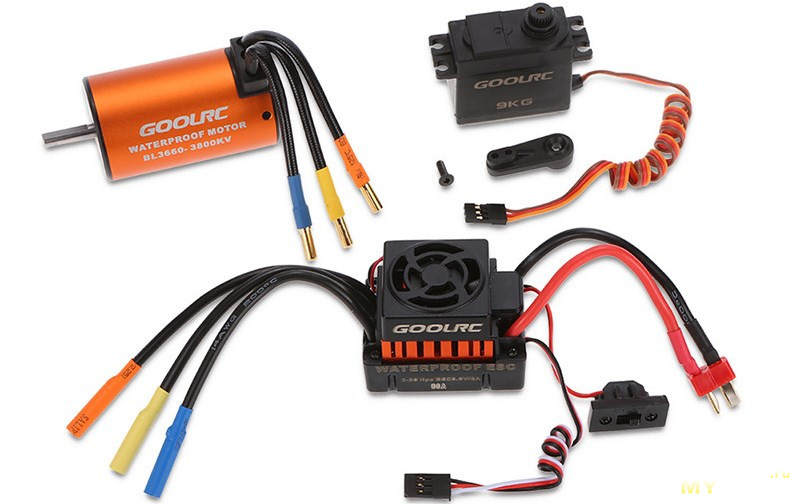
Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок.
Общие требования при выборе мотора были следующие:
— Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В).
— Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.
Характеристики комплекта
Наверх ▲
Характеристики бесколлекторного мотора GoolRC 3660:
Модель: GoolRC 3660
Мощность: 1200W
Рабочее напряжение: до 13V
Предельный ток: 92A
Обороты на вольт (RPM/Volt): 3800KV
Максимальные обороты: до 50000
Диаметр корпуса: 36mm
Длина корпуса: 60mm
Длина вала: 17mm
Диаметр вала: 5mm
Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6)
Коннекторы: 4mm позолоченные «бананы» male
Защита: от пыли и влаги
Характеристики ESC контроллера:
Модель: GoolRC ESC 60A
Продолжительный ток: 60A
Пиковый ток: 320A
Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V / 3A
Коннекторы (Вход): T plug male
Коннекторы (вызод.): 4mm позолоченные «бананы» female
Размеры: 50 х 35 х 34mm (без учета длины кабелей)
Защита: от пыли и влаги
Характеристики сервомашинки:
Рабочее напряжение: 6.0V-7.2V
Скорость поворота (6.0V): 0.16sec/60° без нагрузки
Скорость поворота (7.2V): 0.14sec/60° без нагрузки
Момент удержания (6.0V): 9.0kg.cm
Момент удержания (7.2V): 10.0kg.cm
Размеры: 55 х 20 х 38mm (Д * Ш * В)
Параметры комплекта:
Размер упаковки: 10.5 х 8 х 6 см
Масса упаковки: 390 гр
Фирменная упаковка с логотипом GoolRC
Состав комплекта:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Информационный листок
Размеры для справки и внешний вид двигателя GoolRC 3660 с указанием основных моментов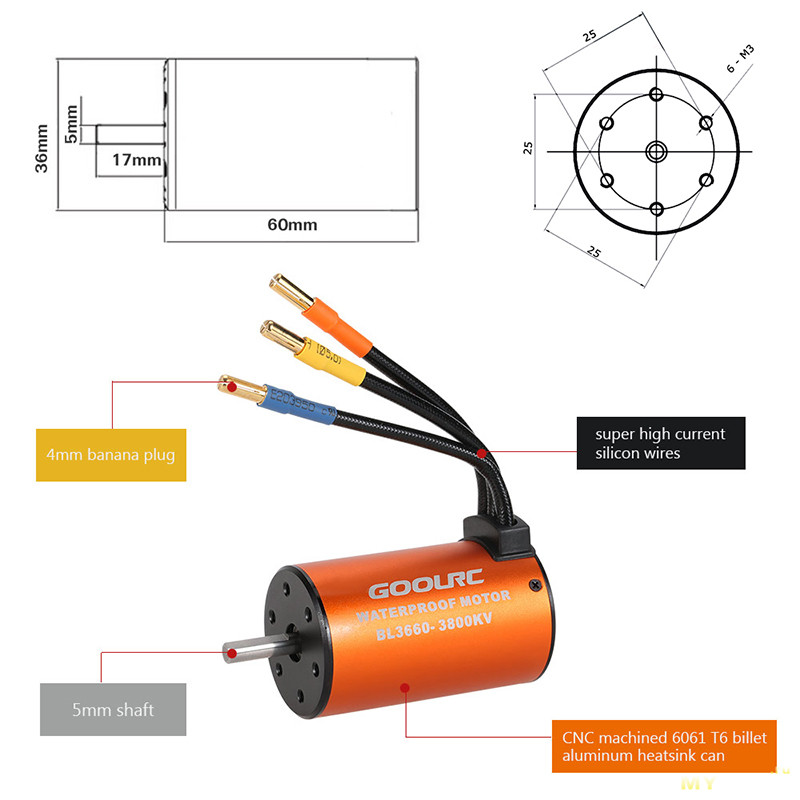
Посылка, упаковка, комплект поставки
Наверх ▲
Теперь несколько слов о самой посылке.
Посылка пришла в виде небольшого почтового пакета с коробкой внутри
Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная
В посылке фирменная коробочка GoolRC
Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом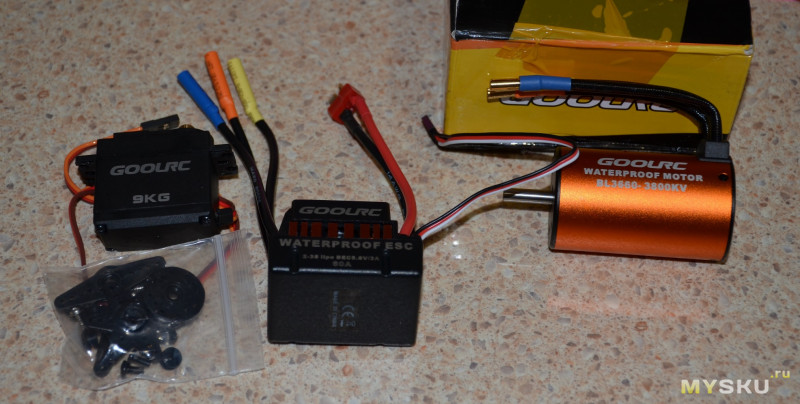
Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя.
Внешний вид двигателя GoolRC 3660
Наверх ▲
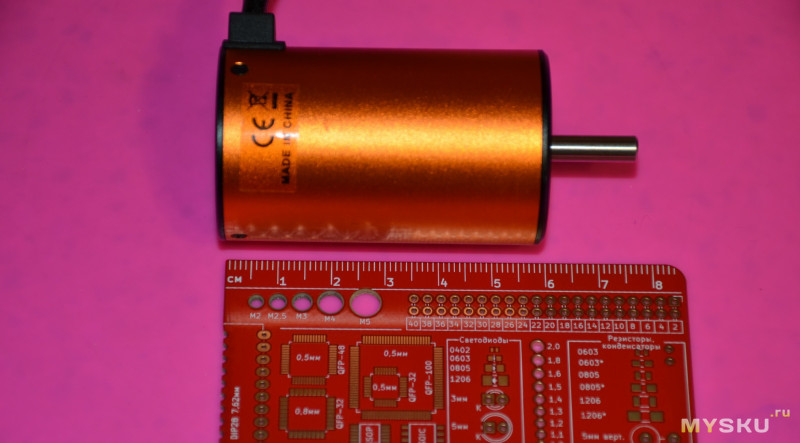
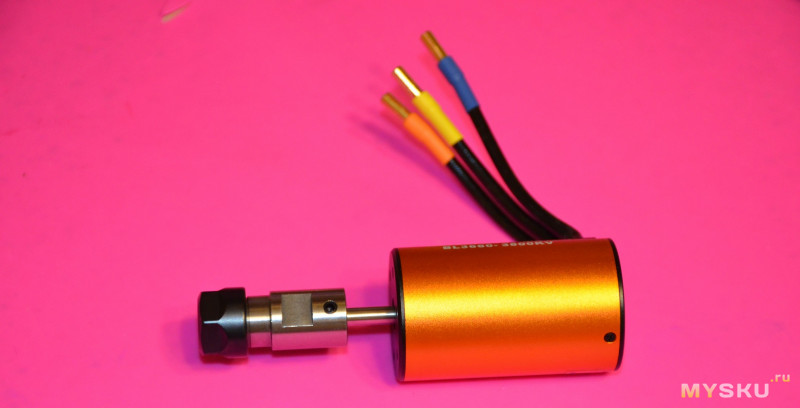
БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner.
Маркировка на корпусе
С заднего торца видно подшипник
Заявлена защита от брызг и влаги
Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм
Провода имеют термоусадку разного цвета: желтый, оранжевый и синий
Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм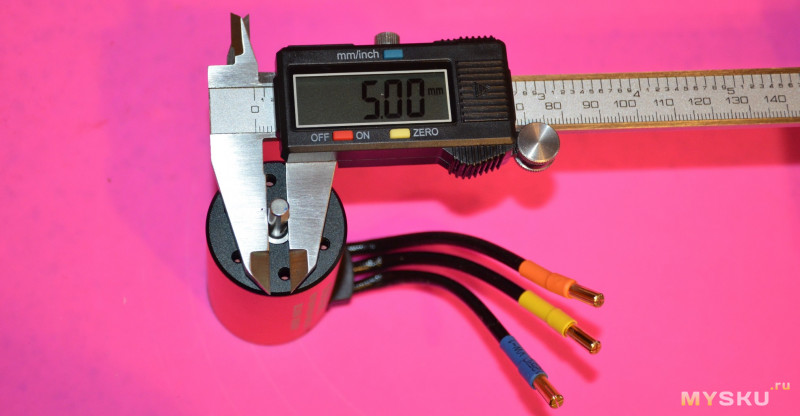

Габариты корпуса двигателя 36х60 мм
Сравнение с коллекторным 775 двигателем
Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя
Сравнение с другими модельными двигателями
Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте)
Внешний вид ESC контроллера
Наверх ▲
ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением. 
На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A
Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки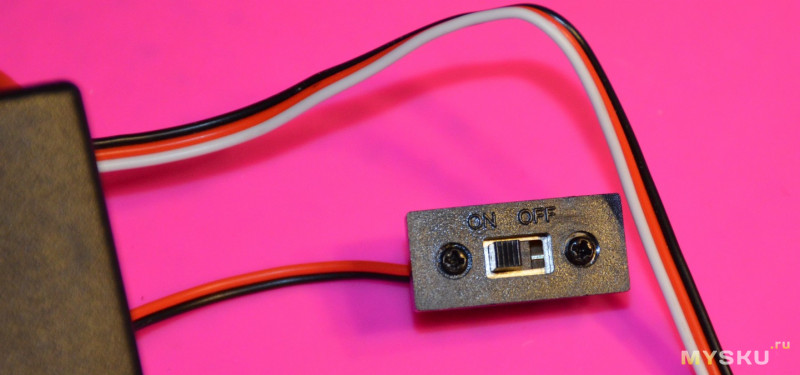
Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала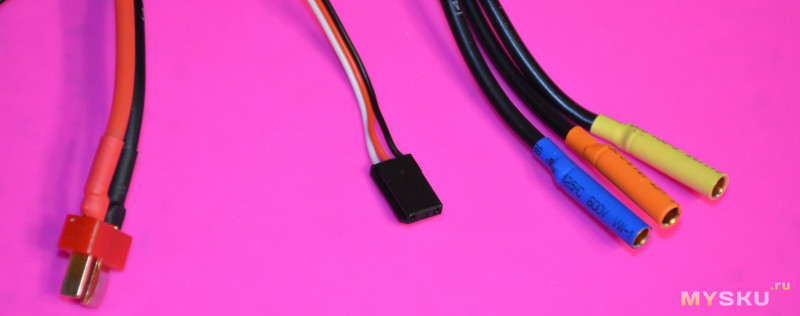
Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно
Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный)))))
На корпусе присутствует маркировка с названием и характеристиками, что очень удобно
Охлаждение активное, работает и регулируется автоматически.
Для оценки размеров приложил PCB ruller
Внешний вид сервомашинки
Наверх ▲
В наборе также присутствует сервомашинка GoolRC на 9 кг.
Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни)
Макрофото вала сервомашинки
Пробуем закрепить крестообразный рычаг для фотографии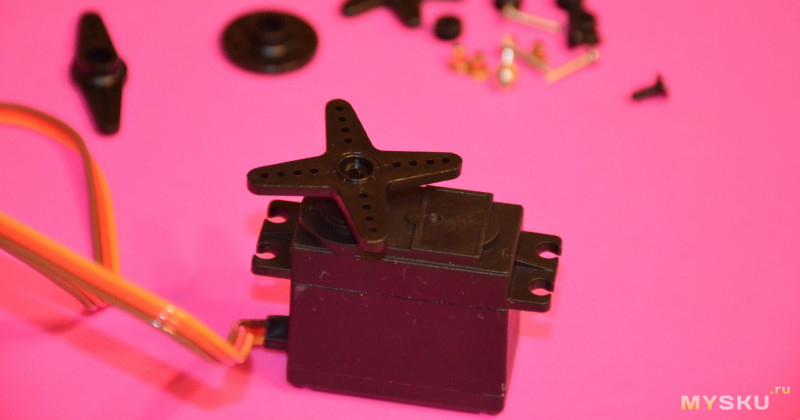
На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри. Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические. 
Фото платы управления сервой
Использование и способ подключения
Наверх ▲
Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на thingiverse. Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока. 
Я выбрал один из популярных проектов и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений)
Привожу чертеж посадочных мест и габаритов двигателя 3660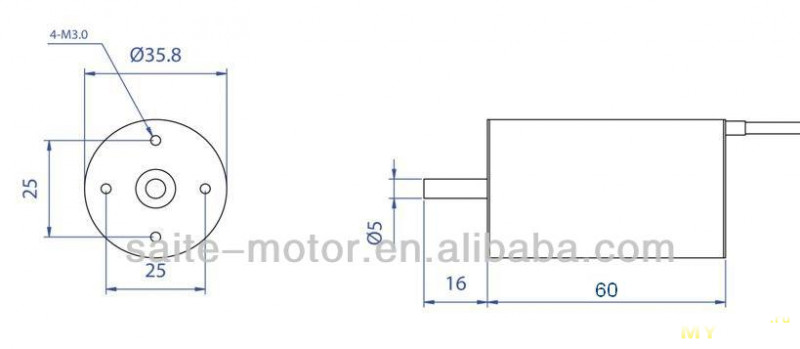
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6)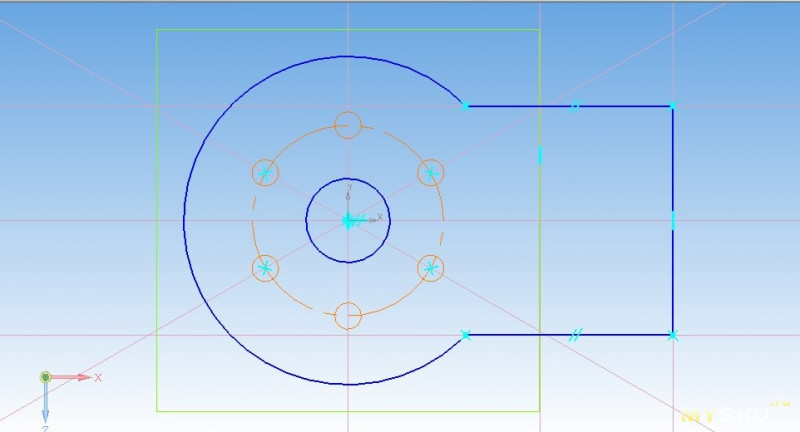
Скрин из программы для печати на принтере
Заодно напечатал и хомут для крепления сверху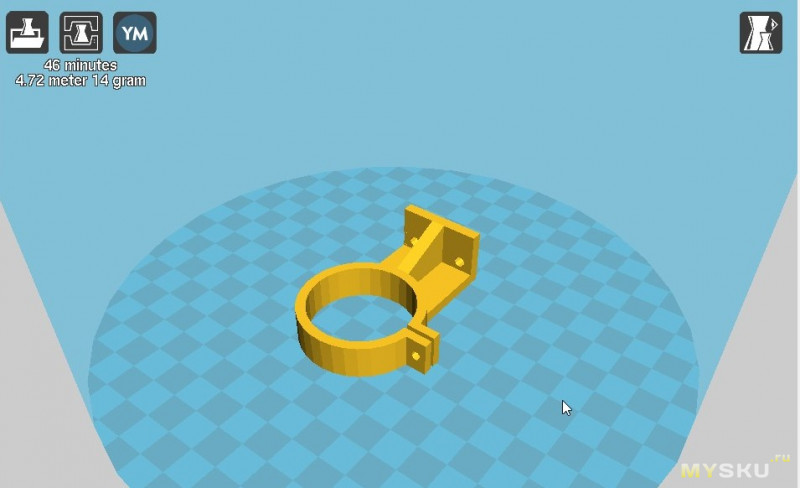
Мотор 3660 с установленным цанговым патроном типа ER11 
Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель.
Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя
При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема.
Соединяем все, по цветам.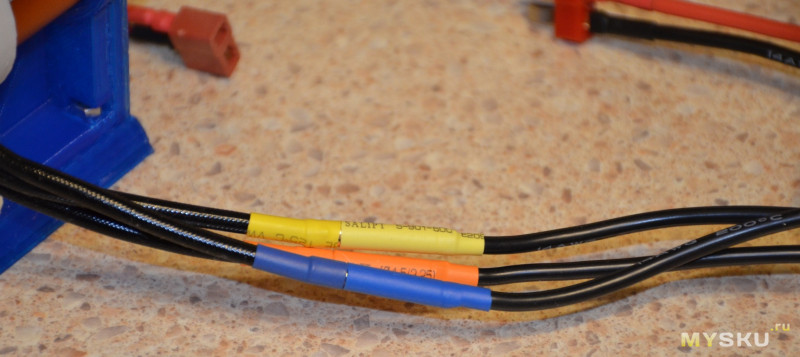
Источник показывает, что холостой ток контроллера небольшой (0.26А)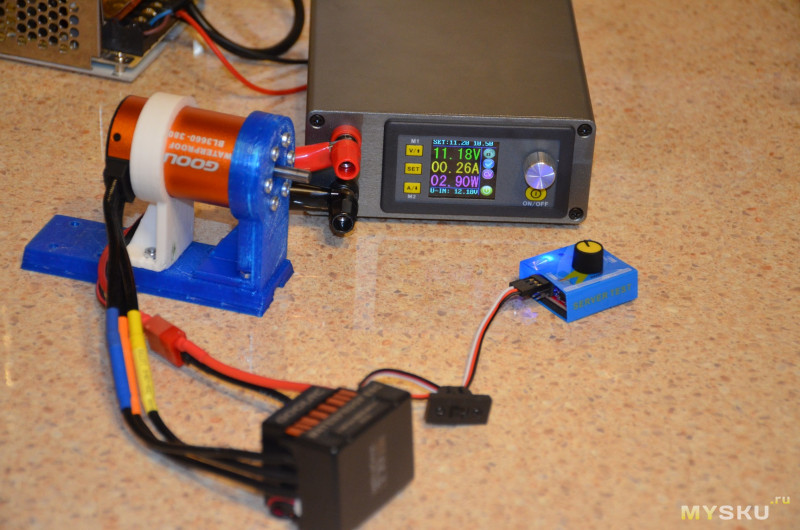
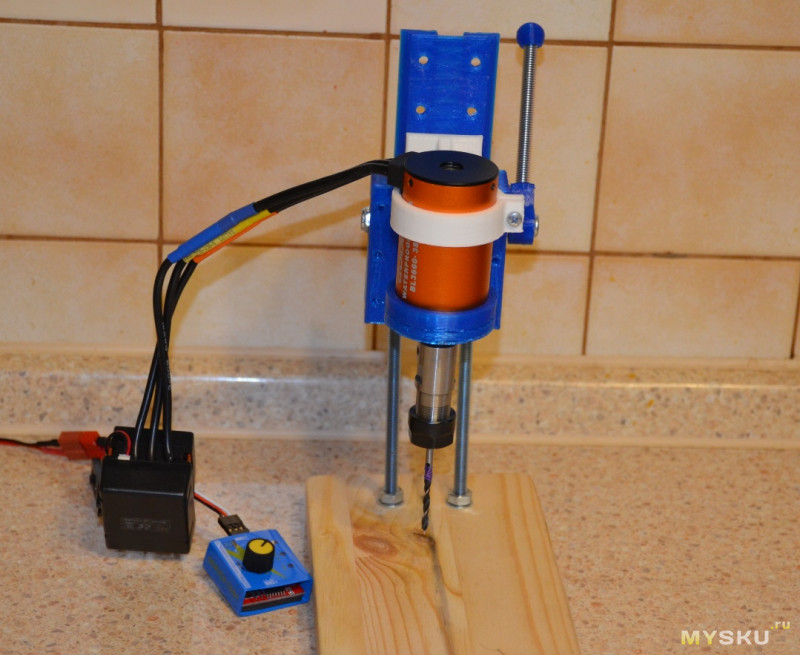
Теперь сверлильный станок.
Собираем все и крепим на стойку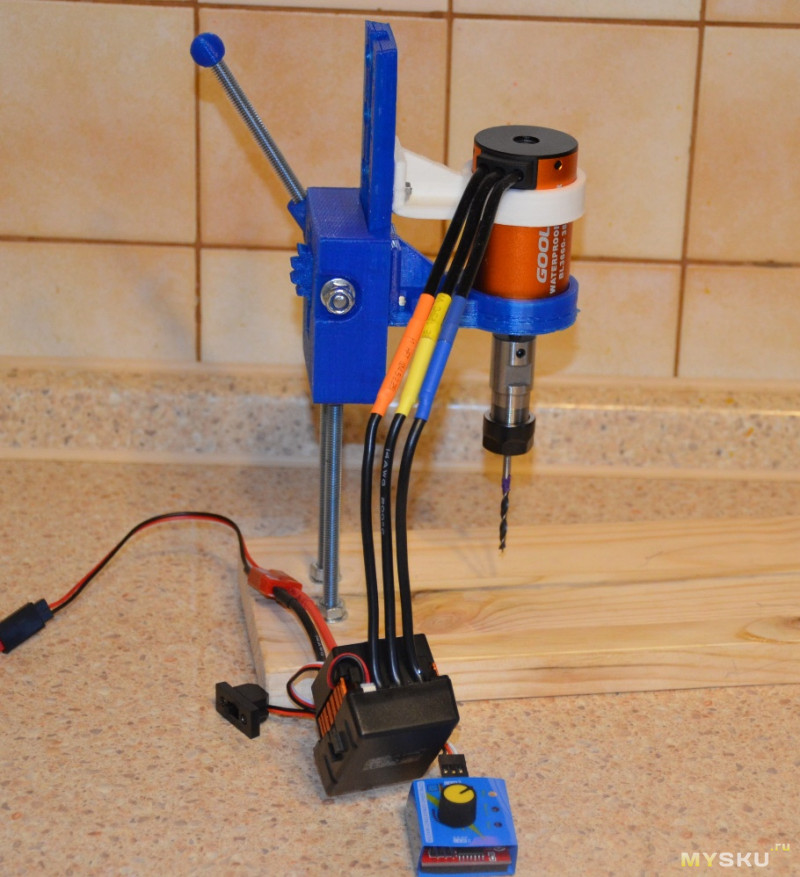
Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера
Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат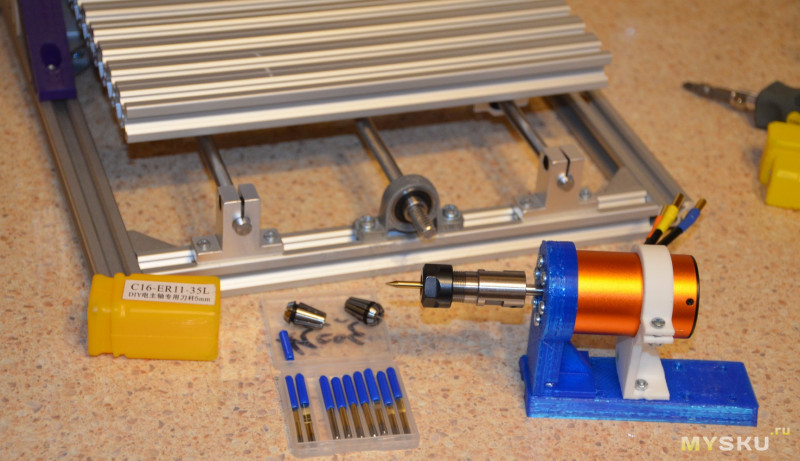


Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660
Заключение
Наверх ▲
Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели.
Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время.
Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.п.).
При заказе пользовался купоном SALE15 со скидкой 5% на все товары магазина.
Спасибо за внимание!
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
 | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
См. также
Ссылки
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
 | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
См. также
Ссылки
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
| | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.