
Скольжение асинхронного двигателя — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 1 сентября 2014; проверки требуют 14 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 1 сентября 2014; проверки требуют 14 правок.Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
s=(n1−n)/n1{\displaystyle s=(n_{1}-n)/n_{1}},
где n{\displaystyle n} — скорость вращения ротора асинхронного двигателя, об/мин
n1{\displaystyle n_{1}} — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
n1=60×f/p{\displaystyle n_{1}=60\times f/p},
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
- s=(n1−n1)/n1=0{\displaystyle s=(n_{1}-n_{1})/n_{1}=0}.
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1{\displaystyle n_{1}} и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором n=n1{\displaystyle n=n_{1}}, что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы асинхронного двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При s=0{\displaystyle s=0} поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой n>n1{\displaystyle n>n_{1}}, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне −∞<s<0{\displaystyle -\infty <s<0}, то есть оно может принимать любые отрицательные значения.
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы
- s=[n1−(−n)]/n1=(n1+n)/n1>1{\displaystyle s=[n_{1}-(-n)]/n_{1}=(n_{1}+n)/n_{1}>1}
Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне 1<s<+∞{\displaystyle 1<s<+\infty }.
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
Конденсаторный двигатель — Википедия
Конденсаторные двигатели — разновидность асинхронных двигателей, в обмотки которого включены конденсаторы для создания сдвига фазы тока.[1] Подключаются в однофазную сеть посредством специальных схем. По количеству фаз статора делятся на двухфазные и трёхфазные.
Существует разные схемы подключения, больше вариантов для трёхфазных двигателей, различающиеся способом соединения обмоток двигателя и составом дополнительных элементов, но минимальная работоспособная схема содержит один конденсатор, от чего и происходит название.
Как правило, одна из обмоток («фаза двигателя») запитывается напрямую от однофазной сети, а другие обмотки запитывается через электрический конденсатор, который сдвигает фазу подводимого тока почти на +90°, или через катушку индуктивности, которая сдвигает фазу почти на −90°. Чтобы результирующее вращающееся магнитное поле не было эллиптическим, последовательно с конденсатором включается переменный проволочный резистор, с помощью которого добиваются кругового вращающегося магнитного поля.
Питание трёхфазного двигателя от однофазной электрической сетиПромышленные конденсаторные двигатели имеют в основе, как правило, двухфазный двигатель (проще производство и схема подключения). Трёхфазные двигатели переделываются под однофазную сеть обычно в частном порядке или мелкосерийном производстве в силу массовости таких типов двигателей и сетей, выбирая при этом между сложностью схемы и недоиспользованием мощности двигателя.
Такие двигатели используются в основном в бытовой технике малой мощности: активаторных стиральных машинах, механизмах катушечных и стационарных кассетных магнитофонов, недорогих проигрывателях виниловых дисков, вентиляторах и другой подобной технике.
Также такие двигатели применяются в циркуляционных насосах водопроводных и отопительных систем (напр. компании
Трёхфазные асинхронные двигатели в однофазную электрическую сеть включают через фазосдвигающий конденсатор.
Первый вывод обмотки электродвигателя подключается к «фазовому» проводу, второй вывод — к нейтральному проводу. Третий вывод обмотки подключается через конденсатор, ёмкость которого подбирается по формулам, в зависимости от того, как соединены обмотки двигателя — звездой или треугольником.
Если обмотки соединены звездой, тогда ёмкость «рабочего» конденсатора должна быть
CWORK/STAR=2800IU{\displaystyle C_{WORK/STAR}=2800{\frac {I}{U}}}.
Если обмотки соединены треугольником, тогда ёмкость «рабочего» конденсатора должна быть
CWORK/TRIANGLE=4800IU{\displaystyle C_{WORK/TRIANGLE}=4800{\frac {I}{U}}}, где
U{\displaystyle U} — напряжение сети, вольт;
I{\displaystyle I} — рабочий ток двигателя, ампер;
C{\displaystyle C} — электрическая ёмкость, микрофарад.
При пуске двигателя кнопкой подключается пусковой конденсатор CLAUNCH{\displaystyle C_{LAUNCH}}, ёмкость которого должна быть в два раза больше ёмкости рабочего. Как только двигатель наберёт нужные обороты, кнопку «Пуск» отпускают.
Переключатель B2{\displaystyle B_{2}} позволяет изменять направление вращения электродвигателя. Выключатель B1{\displaystyle B_{1}} отключает электродвигатель.
Используя паспортные данные электродвигателя, можно определить его рабочий ток I{\displaystyle I} по формуле:
I=P1,73 U η cosφ{\displaystyle I={\frac {P}{1{,}73~U~\eta ~\cos \varphi }}}, где
P{\displaystyle P} — электрическая мощность двигателя, Ватт;
U{\displaystyle U} — напряжение сети, вольт;
η{\displaystyle \eta } — коэффициент полезного действия;
cosφ{\displaystyle \cos \varphi } — коэффициент мощности.
Практически единственный способ реализации асинхронного двигателя в обычной бытовой однофазной сети.
Ёмкость конденсатора подобрана для случая оптимальной частоты вращения двигателя. В случае, если частота вращения ниже оптимальной (пуск или большая механическая нагрузка, особенно переменная) противо-ЭДС в обмотке, подключенной через конденсатор, отклоняется от идеального значения, что разбалансирует всю схему и приводит к появлению эллиптического магнитного поля с сильным падением мощности.
Поэтому схема применима только для небольших или для практически постоянных нагрузок, как, например, в проигрывателе виниловых дисков или же отопительном циркуляционном насосе. В пылесосе же, например, это невозможно, и потому там применяется коллекторный двигатель.
Кроме того, конденсаторный двигатель, как и любой асинхронный, предъявляет довольно высокие требования к качеству синусоиды и частоте питающего напряжения. Потому устройства, содержащие такие двигатели нельзя подключать к дешёвому «компьютерному» ИБП — в режиме работы от батарей такой ИБП дает часто не синус, а меандр, иногда с частотой куда выше 50 Гц. Такие устройства требуют online UPS.
Марки конденсаторных электродвигателей[править | править код]
- КД-5
- КД-6-4 — лицензионная копия с японского конденсаторного двигателя (применялся на магнитофонах серии «Маяк»)
Двигатель асинхронный — это… Что такое Двигатель асинхронный?
Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (меньше) частоте вращения магнитного поля, создаваемого током обмотки статора. Асинхронные машины — наиболее распространённые электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.
Конструкция
Как и любая электромеханическая машина, асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод; все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120°. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения (вращения) магнитного потока обмотки возбуждения, поэтому его изготавливают шихтованным (набранным из пластин) из электротехнической стали для обеспечения минимальных магнитных потерь.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным.
Короткозамкнутый ротор
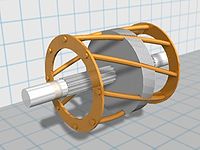
Ротор асинхронной машины типа «беличья клетка»
Короткозамкнутая обмотка ротора, часто называемая «беличья клетка» из-за внешней схожести конструкции, состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами. Стержни этой обмотки вставляют в пазы сердечника ротора. В машинах малой и средней мощности ротор обычно изготавливают путём заливки расплавленного алюминиевого сплава в пазы сердечника ротора. Вместе со стержнями «беличьей клетки» отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие самовентиляцию самого ротора и вентиляцию машины в целом. В машинах большой мощности «беличью клетку» выполняют из медных стержней, концы которых вваривают в короткозамыкающие кольца.
Зачастую пазы ротора или статора делают скошенными для уменьшения высших гармонических ЭДС, вызванных пульсациями магнитного потока из-за наличия зубцов, магнитное сопротивление которых существенно ниже магнитного сопротивления обмотки, а также для снижения шума, вызываемого магнитными причинами.
Асинхронные двигатели с таким ротором имеют небольшой пусковой момент и значительный пусковой ток, что является существенным недостатком «беличьей клетки». Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты. Из достоинств следует отметить лёгкость в изготовлении, малый момент инерции и отсутствие механического контакта со статической частью машины, что гарантирует долговечность и снижает затраты на обслуживание.
Фазный ротор
Фазный ротор имеет трёхфазную (в общем случае — многофазную) обмотку, обычно соединённую по схеме «звезда» и выведённую на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора включают пускорегулирующий реостат, выполняющий роль добавочного активного сопротивления, одинакового для каждой фазы.
В двигателях с фазным ротором имеется возможность увеличивать пусковой момент до максимального значения(в первый момент времени) с помощью пускового реостата, тем самым уменьшая пусковой ток. Такие двигатели применяются для привода механизмов, которые пускают в ход при большой нагрузке.
Скорость вращения поля статора
При питании обмотки статора трёхфазным (в общем случае — многофазным) током создаётся вращающееся магнитное поле, синхронная частота вращения  [об/мин] которого связана с частотой сети
[об/мин] которого связана с частотой сети  [Гц] соотношением:
[Гц] соотношением:
 ,
,
 ,
,где  — число пар магнитных полюсов обмотки статора.
— число пар магнитных полюсов обмотки статора.
Двигательный режим
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке ротора начинает течь ток. На проводники с током этой обмотки, расположенные в магнитном поле обмотки возбуждения, действуют электромагнитные силы; их суммарное усилие образует электромагнитный вращающий момент, увлекающий ротор за магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение, и его установившаяся частота вращения  [об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках и инерцией ротора. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать крутящий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
[об/мин] соответствует равенству электромагнитного момента тормозному, создаваемого нагрузкой на валу, силами трения в подшипниках и инерцией ротора. Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора ЭДС и, в свою очередь, создавать крутящий момент; таким образом, для двигательного режима работы асинхронной машины справедливо неравенство:
- .
 .
.Относительная разность частот вращения магнитного поля и ротора называется скольжением:
- .
 .
.Очевидно, что при двигательном режиме  .
.
Генераторный режим
Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдет в генераторный режим. При этом изменит направление и электромагнитный момент, который станет тормозящим. В генераторном режиме работы скольжение  .
.
При отсутствии первоначального магнитного поля в обмотке статора поток возбуждения создают с помощью постоянных магнитов, либо за счёт остаточной индукции машины и пусковых конденсаторов, параллельно подключенных по схеме «звезда» к фазам обмотки статора .
Асинхронный генератор потребляет намагничивающий ток значительной силы и требует наличия в сети генераторов реактивной мощности в виде синхронных машин,синхронных компенсаторов,батарей статических конденсаторов(БСК). Несмотря на простоту обслуживания, асинхронный генератор применяют сравнительно редко, в основном как вспомогательные источники небольшой мощности и как тормозные устройства.
Режим электромагнитного тормоза
Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, то ЭДС и активная составляющая тока в обмотке ротора будут направлены так же, как в двигательном режиме, и машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Такой режим работы асинхронной машины называется режимом электромагнитного тормоза, и для него справедливы неравенства  .
.
Способы управления асинхронным двигателем
Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора. Существуют следующие способы управления асинхронным двигателем:
- реостатный — изменение частоты вращения АД с фазным ротором путём изменения сопротивления реостата в цепи ротора,
- частотный — изменение частоты вращения АД путём изменения частоты тока в питающей сети, что влечёт за собой изменение частоты вращения поля статора. Применяется включение двигателя через частотный преобразователь,
- переключением обмоток со схемы «звезда» на схему «треугольник» в процессе пуска двигателя, что даёт снижение пусковых токов в обмотках примерно в три раза;
- импульсный — подачей напряжения питания специального вида (например, пилообразного),
- изменением числа пар полюсов, если такое переключение предусмотрено конструктивно,
- изменением амплитуды питающего напряжения, когда изменяется только амплитуда (или действующее значение) управляющего напряжения. Тогда векторы напряжений управления и возбуждения остаются перпендикулярны,
- Фазовое управление характерно тем, что изменение частоты вращения ротора достигается путём изменения сдвига фаз между векторами напряжений возбуждения и управления,
- Амплитудно-фазовый способ включает в себя оба предыдущих способа.
Ссылки
Wikimedia Foundation. 2010.
Асинхронный двигатель Википедия
Асинхро́нный электродвигатель — электрический двигатель переменного тока, частота вращения ротора которого не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным двигателям причисляют также коллекторные двигатели. Второе название асинхронных двигателей — индукционные, это обусловлено тем, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют бо́льшую часть электрических машин, применяясь главным образом в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую, в подавляющем большинстве это асинхронные двигатели с короткозамкнутым ротором (АДКЗ).
Принцип действия асинхронного двигателя заключается в том, что ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле. Частота вращения ротора всегда немного меньше частоты вращения магнитного поля, т.к. при равенстве скоростей поле перестанет наводить в роторе ток, и на ротор перестанет действовать сила Ампера. Отсюда и название — асинхронный двигатель (в отличие от синхронного, частота вращения которого совпадает с частотой магнитного поля). Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности[1][2][3].
Ротор и статор асинхронной машины 0,75 кВт, 1420 об/мин, 50 Гц, 230—400 В, 3,4—2,0 AАсинхронный электродвигатель Википедия
Асинхро́нный электродвигатель — электрический двигатель переменного тока, частота вращения ротора которого не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным двигателям причисляют также коллекторные двигатели. Второе название асинхронных двигателей — индукционные, это обусловлено тем, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют бо́льшую часть электрических машин, применяясь главным образом в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую, в подавляющем большинстве это асинхронные двигатели с короткозамкнутым ротором (АДКЗ).
Принцип действия асинхронного двигателя заключается в том, что ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле. Частота вращения ротора всегда немного меньше частоты вращения магнитного поля, т.к. при равенстве скоростей поле перестанет наводить в роторе ток, и на ротор перестанет действовать сила Ампера. Отсюда и название — асинхронный двигатель (в отличие от синхронного, частота вращения которого совпадает с частотой магнитного поля). Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности[1][2][3].
Ротор и статор асинхронной машины 0,75 кВт, 1420 об/мин, 50 Гц, 230—400 В, 3,4—2,0 AДвигатель асинхронный Википедия
Асинхро́нный электродвигатель — электрический двигатель переменного тока, частота вращения ротора которого не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным двигателям причисляют также коллекторные двигатели. Второе название асинхронных двигателей — индукционные, это обусловлено тем, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют бо́льшую часть электрических машин, применяясь главным образом в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую, в подавляющем большинстве это асинхронные двигатели с короткозамкнутым ротором (АДКЗ).
Принцип действия асинхронного двигателя заключается в том, что ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле. Частота вращения ротора всегда немного меньше частоты вращения магнитного поля, т.к. при равенстве скоростей поле перестанет наводить в роторе ток, и на ротор перестанет действовать сила Ампера. Отсюда и название — асинхронный двигатель (в отличие от синхронного, частота вращения которого совпадает с частотой магнитного поля). Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности[1][2][3].
Ротор и статор асинхронной машины 0,75 кВт, 1420 об/мин, 50 Гц, 230—400 В, 3,4—2,0 A