Векторное управление для асинхронного электродвигателя «на пальцах» / Хабр
В предыдущей статье «Векторное управление электродвигателем «на пальцах» рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной.
Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
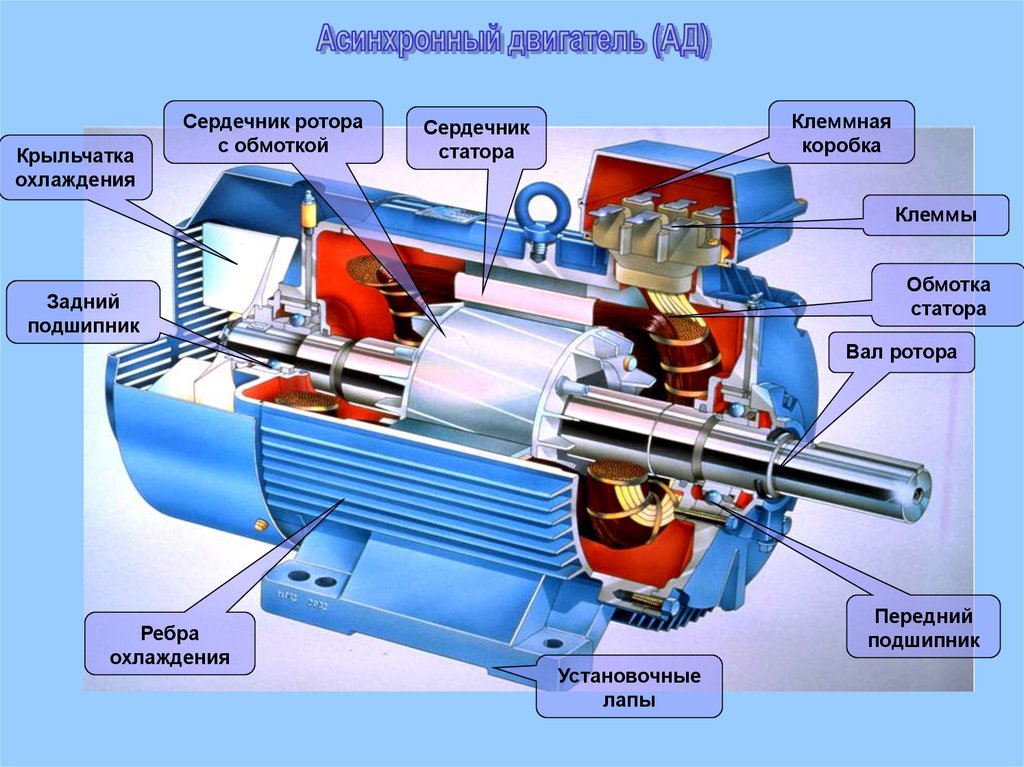
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси β постоянный ток и подождем секунды две-три, пока в роторе перестанут течь ответные токи: «поднесем внешний магнит». То есть дождемся спадания токов в роторе, чтобы магнитное поле статора «пронзило ротор» и никто ему не мешал. Что теперь будет, если выключить ток в статоре? Правильно, на те же две-три секунды, пока ток ротора этому противится, мы из ротора получим «обычный магнит» (рисунок 3).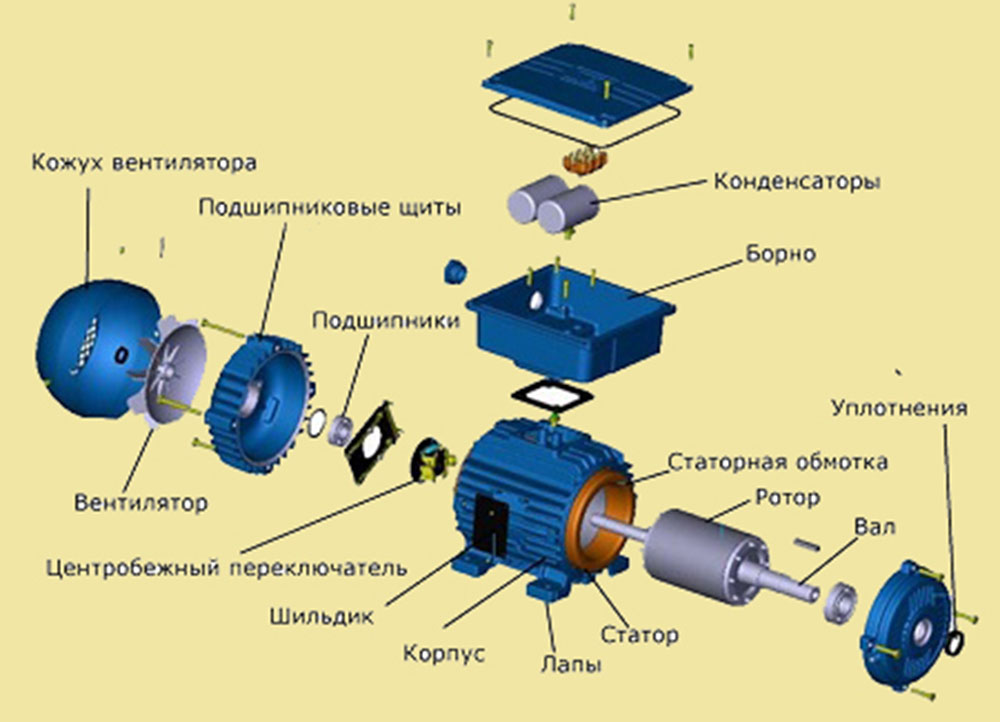
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси
 Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!Рисунок 4. Подадим ток в ось d, намагнитив машину, подготовив всё для подачи тока в ось q статора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток is и «прибив» этот вектор к положению ротора, магнит в роторе «съехал»! И встал ровно вдоль вектора is. Ротор же не понимает, где мы нарисовали ему оси d, q… Ему все равно, крутился он или нет. Важно, что его внутренний «наведенный магнит» в конечном счете хочет стать сонаправленным с магнитным потоком статора, «подчиниться» внешнему потоку.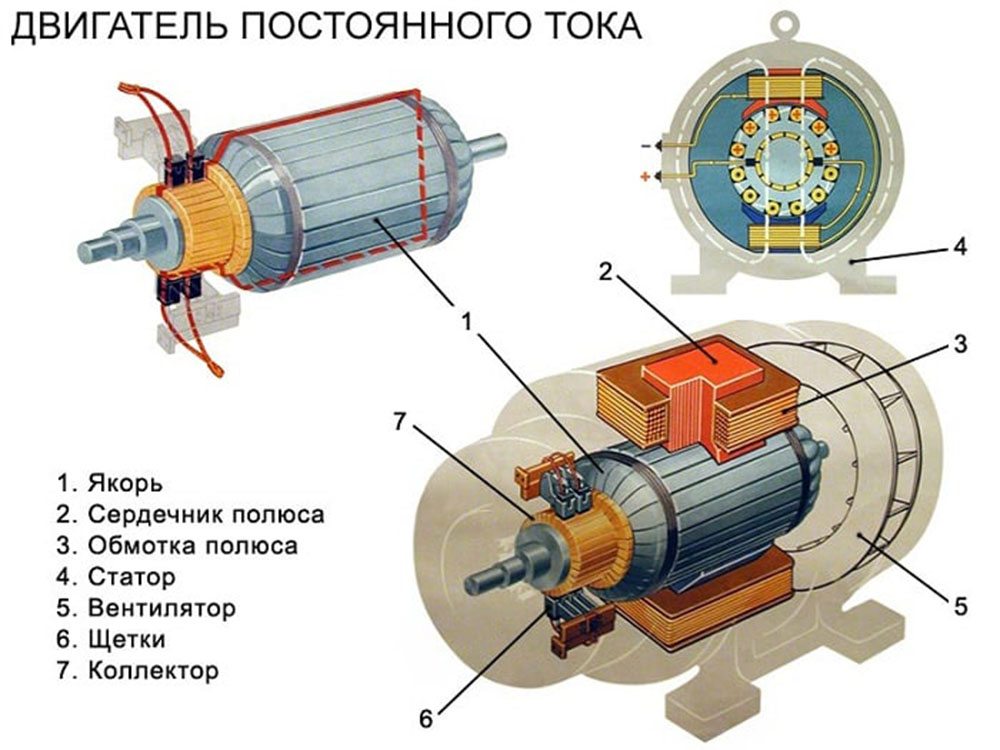
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора).
Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях α, β. На выходе наблюдателя – положение «магнита» ротора, а именно угол наблюдаемого потокосцепления ротора . В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного.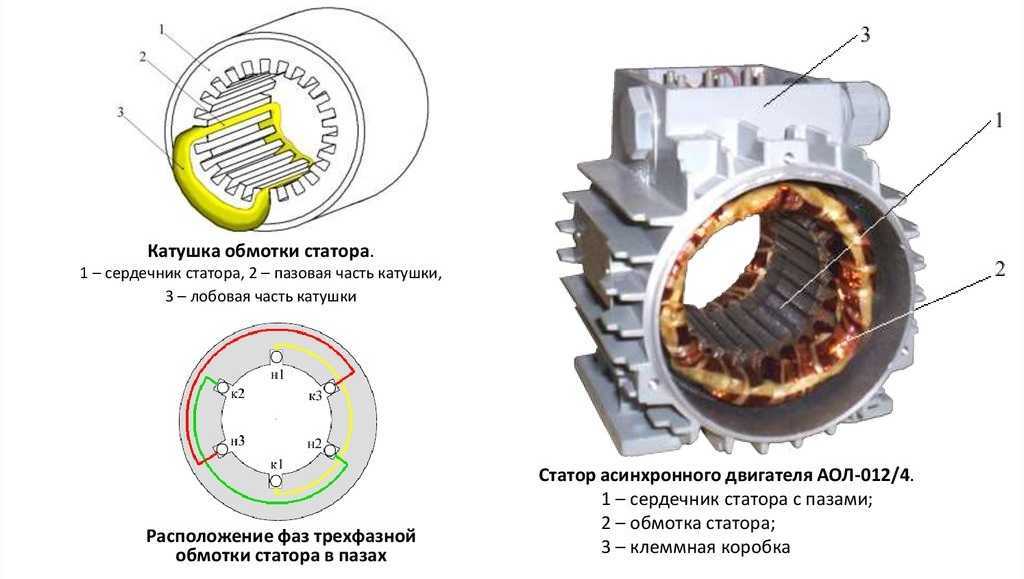 Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)
Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
определение, устройство и принцип работы, использование и подключение
Асинхронный двигатель (определение) — это вид машин, используемый для превращения электроэнергии в механическую силу. А слово «асинхрон» указывает на то, что действия происходят не одновременно. При этом предполагается, что у подобных моторов скорость хода электромагнитного поля статора изначально выше, чем у ротора. Работает машина от сети с переменным током.
Асинхронный двигатель — используется для превращения электроэнергии в механическую силу.Содержание:
- 1 Как устроен асинхронный двигатель
- 2 Принцип работы устройства
- 3 Виды асинхронных двигателей
- 3.1 С короткозамкнутым ротором
- 3.2 С фазным ротором
- 4 Назначение и сфера применения АД
- 5 Схемы подключения
Как устроен асинхронный двигатель
Первая главная деталь в электромоторе называется статором, вторая — ротором. Статор сделан в форме цилиндра из крепкого листа нержавеющей стали.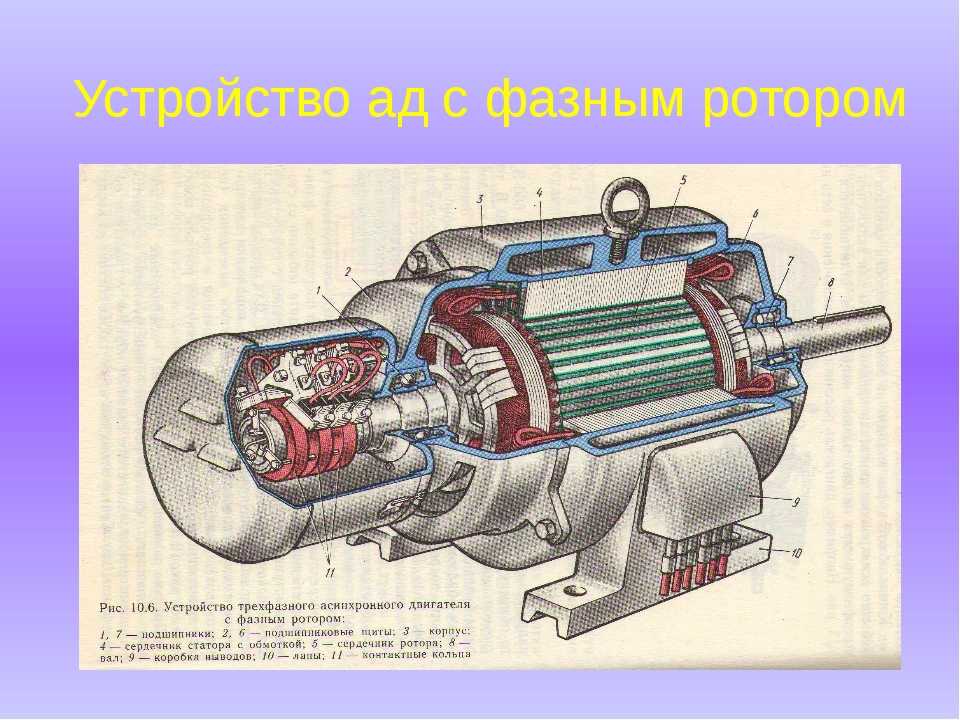 Внутри сердечника статора установлены обмотки из специальных проводов. Оси проводов укладываются под углом в 120°. Для работы на разных электросетях концы кабелей скрепляются в виде треугольника или звезды.
Внутри сердечника статора установлены обмотки из специальных проводов. Оси проводов укладываются под углом в 120°. Для работы на разных электросетях концы кабелей скрепляются в виде треугольника или звезды.
Роторы в асинхронном двигателе подразделяются на 2 типа:
- Короткозамкнутый. Он является сердечником, в который заливается раскаленный металл. После этого в нем появляются железные стержни, замыкающиеся маленькими торцевыми колечками. Подобная схема конструкции именуется «беличьей клеткой». В устройствах с высокой мощностью алюминий заменяется на медь.
- С фазами. Мотор имеет толстую трехфазную обмотку, которая почти не отличается от обмотки статора. В основном концы проводов скрепляются в форме звезды, а затем дополнительно закрепляются колечками. Используя щетку, которая подсоединена к обручам, к цепи можно подключить дополнительный резистор. Последний необходим для того, чтобы человек мог контролировать переменное сопротивление в фазе ротора.
Принцип работы устройства
Частями асинхронного двигателя являются статор и ротор.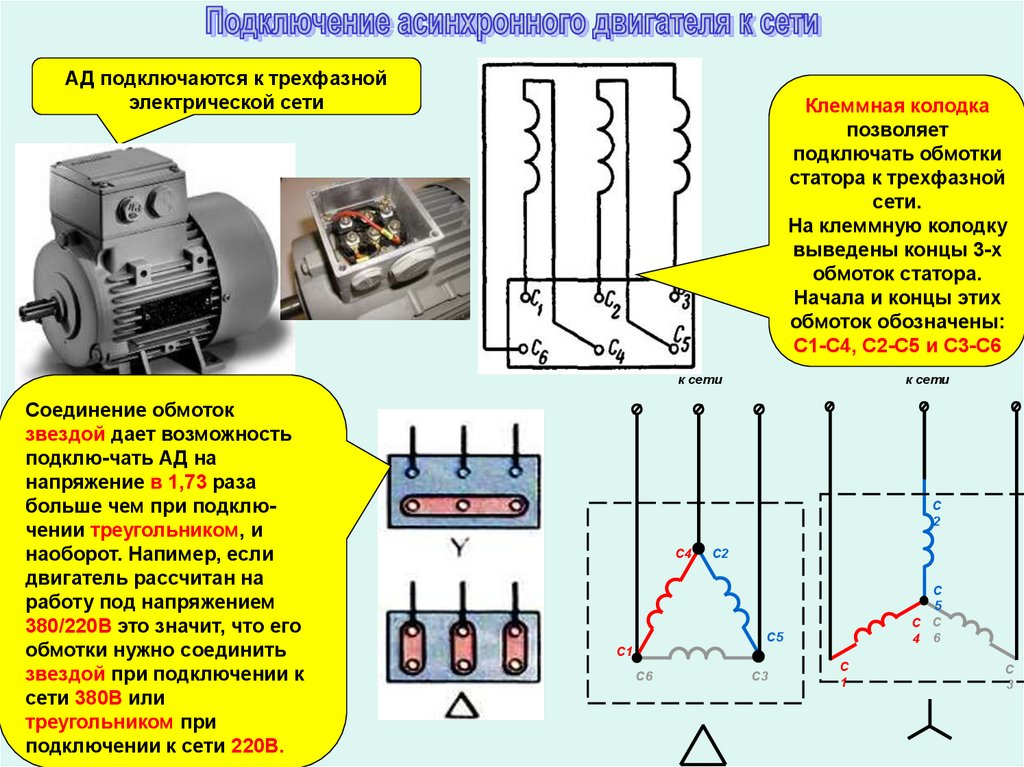
Если начать подавать электрический ток на кабели статора, то двигатель начнет работать. Внутри машины начинается индукция, то есть в двигателе индуцируется мощное электромагнитное поле. Например, в технике с постоянным электрическим током необходимо создавать электромагнитное поле в якоре с помощью щеток.
По закону Фарадея, в устройстве, которое обладает короткозамкнутой обмоткой, проходит наведенный электроток, потому что цепочка замыкается по методу короткого замыкания. Данный ток, как и напряжение в статоре, приводит к появлению магнитного поля. Ротор устройства становится магнитом в статоре, обладающим вращающимся электромагнитным полем.
Статор не двигается, и поле перемещается внутри машины с нормальной скоростью, а в роторе индуцируется электроток, что делает из него мощный магнит. Благодаря этому подвижный ротор начинает двигаться благодаря полю статора. Почему происходит асинхронное вращение, можно понять, зная, что в момент объединения магнитные поля пытаются компенсировать недостатки друг друга.
Процесс скольжения может проходить не только с небольшим опозданием, но и с опережением. В первом случае мотор превращает электроэнергию в механическую (например, станок начинает двигаться). А во втором происходит генераторная работа, то есть движение деталей устройства вырабатывает электричество.
Созданный момент кручения полностью зависит от мощности постоянного напряжения для подпитки статора. Постоянно меняя частоту электрического тока и силу напряжения, человек может контролировать момент вращения, что и позволяет влиять на режим работы двигателя. Данная идея работает как на простых однофазных моторах, так и на трехфазных двигателях.
Виды асинхронных двигателей
С короткозамкнутым ротором
Есть 2 типа АДКР (двигателей с коротким замкнутым ротором):
- с ротором в виде клеток для белок;
- со специальными ободками.
С фазным ротором
Однофазный асинхронный двигатель подразделяется на следующие виды:
- с нескрепленными проводами;
- с запускающей деталью;
- с запускающим и функционирующим конденсаторами;
- с измененным расположением полюса.


Назначение и сфера применения АД
Без асинхронного двигателя не обходится большинство предприятий.Электродвигатели, которые называются асинхронными, применяются почти во всех отраслях промышленности и сельского хозяйства. Они тратят около 70% электричества, которое предназначено для превращения мощности тока в поступательное движение. Работа асинхронного двигателя считается наиболее эффективной в качестве электрической тяги. Без подобных машин не обходится большинство предприятий.
У данных устройств есть несколько положительных сторон:
- Простая и недорогая конструкция, поэтому производство машин не отнимает много времени и средств.
- Низкие расходы по эксплуатации обеспечены отказом от скользящего узелка токосъема, что и повышает надежность мотора.
- Доступность. Они продаются почти во всех магазинах по невысокой цене.
Данный вид машин бывает трехфазным или однофазным в зависимости от числа питающих частей. Если соблюдать правила техники безопасности и настроить электросеть, то трехфазный мотор может работать на однофазной сети.
Асинхронные устройства используются не только на производстве, но и в быту. Однофазные двигатели устанавливаются в вентиляторы, стиральные машины, насосы для воды и небольшие электрические инструменты.
Схемы подключения
Провода трехфазного двигателя подключаются либо по схеме треугольника, либо по звезде. При этом для последнего напряжение должно быть выше. Также перед установкой обмотки нужно определить момент на валу в моторе. Стоит обратить внимание на тот момент, что АДКР, подсоединенный различными методами к одной и той же цепи, требует разной мощности. Поэтому нельзя подключать двигатель, в котором предполагается использование только схемы треугольника, с принципом треугольника.
Иногда с целью снижения пускового тока люди коммутируют на этапе пуска контакты звезды в треугольник, но в таком случае падает и пусковой момент.
А для подсоединения трехфазного мотора к однофазной электросети профессионалы применяют разные фазосдвигающие детали, например конденсатор и резистор.
Асинхронные двигатели Oswald FQD с водяным охлаждением
Асинхронные двигатели и генераторы OSWALD серии FQD с жидкостным охлаждением особенно подходят, когда к системе привода предъявляются высокие требования. Двигатели рассчитаны на широкий диапазон скоростей и высокодинамическую работу. 4-полюсные двигатели OSWALD FQD мощностью от 1 кВт до 700 кВт характеризуются высокой удельной мощностью при небольшом занимаемом пространстве. Высокая максимальная скорость, широкий диапазон ослабления поля и чрезвычайно низкий уровень шума. Свяжитесь с нами, чтобы адаптировать электрическую и механическую конструкцию к вашим конкретным требованиям.
Асинхронные двигатели и генераторы OSWALD с жидкостным охлаждением серии FQD особенно подходят, когда к системе привода предъявляются высокие требования. Двигатели рассчитаны на широкий диапазон скоростей и высокодинамическую работу. 4-полюсные двигатели OSWALD FQD мощностью от 1 кВт до 700 кВт характеризуются высокой удельной мощностью при небольшом занимаемом пространстве. Полностью закрытые двигатели FQD охлаждаются через встроенную охлаждающую рубашку
Двигатели рассчитаны на широкий диапазон скоростей и высокодинамическую работу. 4-полюсные двигатели OSWALD FQD мощностью от 1 кВт до 700 кВт характеризуются высокой удельной мощностью при небольшом занимаемом пространстве. Полностью закрытые двигатели FQD охлаждаются через встроенную охлаждающую рубашку
водой или маслом. Высокая степень надежности и низкие эксплуатационные расходы 9Требования 0005 обусловлены использованием предварительно смазанных подшипников, а также стабильного корпуса и опорных плит. Двигатели FQD лучше всего подходят для управляемых приводов с преобразователями частоты. Установка энкодера позволяет управлять скоростью в зависимости от поля. Серия FQD является результатом многолетнего опыта работы с частотно-регулируемыми трехфазными двигателями с короткозамкнутым ротором. При разработке особое внимание уделялось низкому уровню шума, высокому ускорению и крутящему моменту, малой инерции ротора и высокой максимальной скорости при минимальной вибрации.
Типичные области примененияАсинхронные двигатели серии FQD лучше всего подходят для экструдеров и литьевых машин, станков, приводов транспортных средств, испытательных систем, упаковочных машин, экструдеров, текстильных машин, волочильных станков, печатных машин, гидроэлектростанций.
Особенности • Высокая максимальная скорость
• Широкий диапазон ослабления поля
• Чрезвычайно низкий уровень шума
Особенности двигателей Oswald • Компактность, надежность, высокая удельная мощность
• Не требует обслуживания или требует минимального обслуживания
• Малоинерционный, динамичный
• Долговечность
• Сделано в Германии
Технические характеристики • Крутящий момент при рабочем цикле S1: 50-1000 Нм
• Мощность: 5-600 кВт
• Скорость: до 20 000 об/мин
• Охлаждение: жидкость
• Класс защиты: IP54 • IP65
КонструкцияДвигатели разработаны в соотв. соответствующим стандартам и правилам, в частности DIN EN 60034/VDE 0530-1, DIN42676/42677/42948. Исключением является расположение размеров вала и частично размеров фланцев; по этому, пожалуйста, смотрите подробные таблицы размеров. Механические крепления: В5, В1, В3, В35.
МощностьНоминальная мощность в таблицах действительна для номинальных частот 50 Гц и 70 Гц. Двигатели могут регулироваться до указанной номинальной скорости nN при постоянном крутящем моменте и до скорости nF при постоянной мощности. При скорости выше nF мощность снижается. Указана номинальная мощность PN для продолжительной работы S1 с соответствующими данными частоты, момента и тока
Двигатели могут регулироваться до указанной номинальной скорости nN при постоянном крутящем моменте и до скорости nF при постоянной мощности. При скорости выше nF мощность снижается. Указана номинальная мощность PN для продолжительной работы S1 с соответствующими данными частоты, момента и тока
. S3-мощность: P(S3-x%ED) = P/sqrt (x%/100%). При желании могут быть предложены другое напряжение, номинальная скорость и диапазон скоростей. Размер инвертора см. в разделе номинальный ток и ток перегрузки.
Система охлаждения Потери в двигателях с жидкостным охлаждением компенсируются охлаждающей средой (чаще всего водой). В серии FQD жидкость проходит через встроенную охлаждающую рубашку.
Система охлаждения двигателей OSWALD FQD устойчива к агрессивным средам за счет использования нержавеющей стали или меди, поэтому вода не нуждается в защите от коррозии. В открытых системах охлаждения необходимо использовать чистую охлаждающую воду. Загрязнения частицами грязи следует избегать путем установки систем фильтрации (фильтрация <100 мкм). Любое скопление заиления или закрутки должно быть предотвращено. Температура охлаждающей воды на входе 25°С. При более высокой температуре мощность должна быть снижена. Следует избегать конденсации воды; когда температура охлаждающей воды ниже комнатной температуры, поток воды должен быть остановлен, когда двигатель останавливается на более длительное время. Подробные данные см. на заводской табличке двигателя.
Любое скопление заиления или закрутки должно быть предотвращено. Температура охлаждающей воды на входе 25°С. При более высокой температуре мощность должна быть снижена. Следует избегать конденсации воды; когда температура охлаждающей воды ниже комнатной температуры, поток воды должен быть остановлен, когда двигатель останавливается на более длительное время. Подробные данные см. на заводской табличке двигателя.
Для получения дополнительной информации об этом изделии (асинхронные двигатели Oswald FQD с водяным охлаждением) или других изделиях заполните форму ниже или свяжитесь с нашим офисом напрямую:
Телефон: 815-962-5600
Факс: 815-962-4600
Адрес: 304 North Main St, Suite 104, Rockford, IL 61101-1101 USA
Электронная почта: infο@ΤΑCRοckfοrd.cοm
Синхронные двигатели MF
Синхронные двигатели и генераторы OSWALD с жидкостным охлаждением серии M особенно подходят, когда к системе привода предъявляются высокие требования.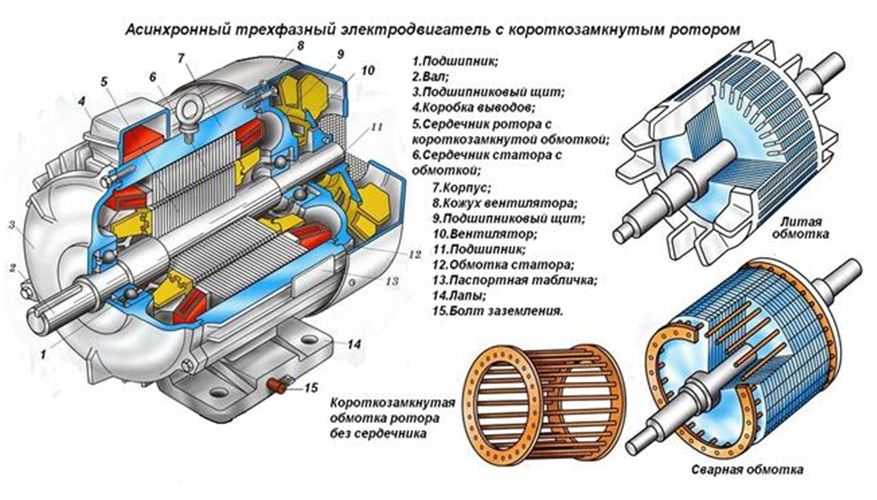 Двигатели рассчитаны на широкий диапазон скоростей и высокодинамическую работу. 6-полюсные двигатели OSWALD MF мощностью от 1 кВт до 175 кВт отличаются высочайшей удельной мощностью при небольшом занимаемом пространстве. Высокая максимальная скорость, чрезвычайно низкий уровень шума, отсутствие потерь в роторе благодаря магнитам NdFeB. Свяжитесь с нами, чтобы адаптировать электрическую и механическую конструкцию к вашим конкретным требованиям. 9№ 0003
Двигатели рассчитаны на широкий диапазон скоростей и высокодинамическую работу. 6-полюсные двигатели OSWALD MF мощностью от 1 кВт до 175 кВт отличаются высочайшей удельной мощностью при небольшом занимаемом пространстве. Высокая максимальная скорость, чрезвычайно низкий уровень шума, отсутствие потерь в роторе благодаря магнитам NdFeB. Свяжитесь с нами, чтобы адаптировать электрическую и механическую конструкцию к вашим конкретным требованиям. 9№ 0003
Мини-кулер для воды
Мини-Акварель BKW можно использовать для самых разных целей. Некоторые примеры включают сварочное оборудование, лазерно-плазменные установки, электронные микроскопы, рентгеновские трубки, гидравлические системы, машины для литья пластмасс, шпиндели, двигатели, установки для очистки и обезжиривания, а также множество других применений.
QD Асинхронные двигатели с внешним охлаждением
Асинхронные серводвигатели OSWALD серии QD особенно подходят, когда предъявляются высокие требования к диапазону скоростей, динамике, плавности хода и эксплуатационной надежности. Четырехполюсные двигатели OSWALD QD мощностью от 1 кВт до 150 кВт имеют квадратную раму и характеризуются высокой удельной мощностью при небольшой занимаемой площади.
Четырехполюсные двигатели OSWALD QD мощностью от 1 кВт до 150 кВт имеют квадратную раму и характеризуются высокой удельной мощностью при небольшой занимаемой площади.
Моментные двигатели и кольцевые генераторы TF
Прямой электропривод, большой максимальный крутящий момент, низкая номинальная скорость, большой полый вал, чрезвычайно низкий уровень шума, отсутствие потерь в роторе. Свяжитесь с нами, чтобы адаптировать электрическую и механическую конструкцию к вашим конкретным требованиям.
Асинхронные двигатели QDI для испытательных стендов
Высокая максимальная скорость, широкий диапазон ослабления поля, очень низкий уровень вибрации и стандартная конфигурация с гибридными подшипниками. Свяжитесь с нами, чтобы адаптировать электрическую и механическую конструкцию к вашим конкретным требованиям.
Водоохладители
Включая полностью герметичный компрессор охлаждающего агента для охлаждения чистой воды, гликолевой смеси или эмульсии. Мощный водяной насос (WRK30-100 из нержавеющей стали), контейнер и полная электрическая система управления включены. Специальный испаритель обеспечивает предварительную температуру воды до прибл. 2 градуса Цельсия без антифриза. Даже полное замораживание не приведет к каким-либо дефектам или полному выходу из строя. Избегайте чрезмерных расходов на охлаждающую воду и сложные установки, используя сложную систему установки и вместо этого используйте повторные охладители воды производства BKW.
Специальный испаритель обеспечивает предварительную температуру воды до прибл. 2 градуса Цельсия без антифриза. Даже полное замораживание не приведет к каким-либо дефектам или полному выходу из строя. Избегайте чрезмерных расходов на охлаждающую воду и сложные установки, используя сложную систему установки и вместо этого используйте повторные охладители воды производства BKW.
Охладители Power Clamp Power Cooler
Охладитель Power Cooler — это новый блок охлаждения держателей инструментов. Воздушный поток, смешанный с мелкодисперсным водяным туманом, охлаждает термопатроны любой формы в рекордно короткие сроки.
Теплообменники
Эти системы охлаждения облегчают охлаждение масел и других сред (в оборудовании BKW даже загрязненных сред). Вода подается на передний вход с внутренней стороны труб, а охлаждаемая среда поступает из рубашки.
Плоские линейные двигатели LIFS
Прямой электропривод, высокая скорость, без редуктора, без люфта при изменении направления, без потерь в роторе, с магнитами NdFeB. Свяжитесь с нами, чтобы адаптировать электрическую и механическую конструкцию к вашим конкретным требованиям.
Свяжитесь с нами, чтобы адаптировать электрическую и механическую конструкцию к вашим конкретным требованиям.
Энкодеры для асинхронных двигателей — Kübler Group
Надежные датчики
- Инкрементальные и абсолютные энкодеры
- Безподшипниковые энкодеры – компактное решение
- Гибкие решения для механического монтажа и установки
- Индивидуальные решения со 100% интеграцией
- Многочисленные электрические интерфейсы
Запрос индивидуального решения
Оптимальная обратная связь по скорости и определение положения с помощью энкодеров Kübler.
Асинхронные двигатели являются наиболее часто используемыми электроприводами во всем мире в промышленной среде. В зависимости от области применения к датчикам предъявляются различные требования. Компания Kübler десятилетиями поставляет подходящие решения для энкодеров известным производителям в этой отрасли. Наши клиенты ценят премиальное качество, надежность и проверенные и надежные технологии нашей продукции. Вместе мы также будем разрабатывать двигатели завтрашнего дня. Например, мы полностью интегрировали интеллектуальные бесподшипниковые энкодеры в асинхронные двигатели. Когда ваши асинхронные двигатели оснащаются датчиками Kübler?
Вместе мы также будем разрабатывать двигатели завтрашнего дня. Например, мы полностью интегрировали интеллектуальные бесподшипниковые энкодеры в асинхронные двигатели. Когда ваши асинхронные двигатели оснащаются датчиками Kübler?
Инкрементальные энкодеры
Инкрементальные энкодеры Kübler особенно подходят для измерения скорости и, таким образом, для оптимальной обратной связи по скорости. Вам доступны многочисленные варианты заказа, такие как варианты вала и полого вала, а также механические и электрические интерфейсы. Премиальное качество Kübler означает безупречную непрерывную работу ваших асинхронных двигателей.
Компактное и экономичное решение
- Размер ø 40 мм
- Разрешение до 2500 имп.
- Вал или глухой полый вал
Стандарт на асинхронные двигатели
- Размер ø 58 мм
- Разрешение до 5000 имп.
- Вал или полый вал
Датчик SinCos для функциональной безопасности
- Размер ø 58 мм
- Разрешение до 2048 стр. /об.
- До SIL3/PLe
 /об.
/об.SinCos-энкодер с высокой степенью интерполяции
- Размер ø 58 мм
- Разрешение до 2048 стр./об.
- Вал или полый вал
Безподшипниковые энкодеры
- Монтажная глубина 16 мм
- Неизнашиваемый — бесконтактный
- Различные диаметры вала
Абсолютный энкодер
Абсолютные энкодеры Kübler в однооборотном и многооборотном исполнении идеально подходят для точного определения углового положения ротора и, таким образом, для контроля положения. Вам доступны многочисленные варианты заказа, такие как варианты вала и полого вала, а также механические и электрические интерфейсы (SSI, BiSS, CANopen, SinCos, RS422).
Однооборотный датчик высокого разрешения
- Размер ø 58 мм
- Разрешение до 21 бит
- Вал или полый вал
Многооборотные энкодеры для асинхронных двигателей
- Размер ø 58 мм
- Общее разрешение 29 бит
- Вал, глухой вал или полый вал
Функциональная безопасность SIL2/PLd
- Многооборотное исполнение
- Размер ø 58 мм
- Общее разрешение 29 бит
- Вал или полый вал
Функциональная безопасность SIL3/PLd
- Многооборотное исполнение
- Размер ø 58 мм
- Общее разрешение 29 бит
- Вал или полый вал
Абсолютный энкодер без механического редуктора
Сердцем этих абсолютных энкодеров Sendix является запатентованная технология Intelligent Scan Technology™, отмеченная многочисленными наградами. Оптический энкодер имеет все однооборотные и многооборотные функции на одном OptoASIC, что обеспечивает очень высокий уровень надежности при одновременном высоком разрешении. Многооборотная конструкция обеспечивает общее разрешение до 41 бита. Отличительной особенностью является отсутствие износа благодаря оптическим датчикам без механических передач.
Оптический энкодер имеет все однооборотные и многооборотные функции на одном OptoASIC, что обеспечивает очень высокий уровень надежности при одновременном высоком разрешении. Многооборотная конструкция обеспечивает общее разрешение до 41 бита. Отличительной особенностью является отсутствие износа благодаря оптическим датчикам без механических передач.
Компактный однооборотный энкодер
- Размер ø 36 мм
- Разрешение до 17 бит
- Вал, глухой вал или полый вал
Компактный многооборотный энкодер
- Размер ø 36 мм
- Общее разрешение до 41 бит
- Вал, глухой вал или полый вал
Многооборотный энкодер стандартного формата
- Размер ø 58 мм
- Общее разрешение до 41 бит
- Вал или полый вал
Для тонкой конструкции двигателя
- Многооборотный энкодер
- Монтажная глубина 43 мм
- Размер ø 58 мм
- Общее разрешение 41 бит
ВИДЕО