Базові відомості про активної і реактивної електроенергії (потужності). Статті компанії «ЕлМісто»
Досить часто багато клієнти просять пояснити поняття активної та реактивної електроенергії. Використовуючи терміни АКТИВНА і РЕАКТИВНА, більш коректно їх поєднувати зі словом потужність, хоча ряд видань використовує «електроенергія» в якості другого слова в словосполученні. Пропонуємо розібратися в даній ситуації.
Звернемося до основ електротехніки, описаним у книзі Безсонова Л. А. «Теоретичні основи електротехніки» — М: Вища школа, 1984:
Немає активної електроенергії. Є активна потужність.
Немає реактивної електроенергії. Є реактивна потужність.
Активна — це нагрівання резисторів.
Реактивна — коливання струму і напруги в ємностях і індуктивностях.
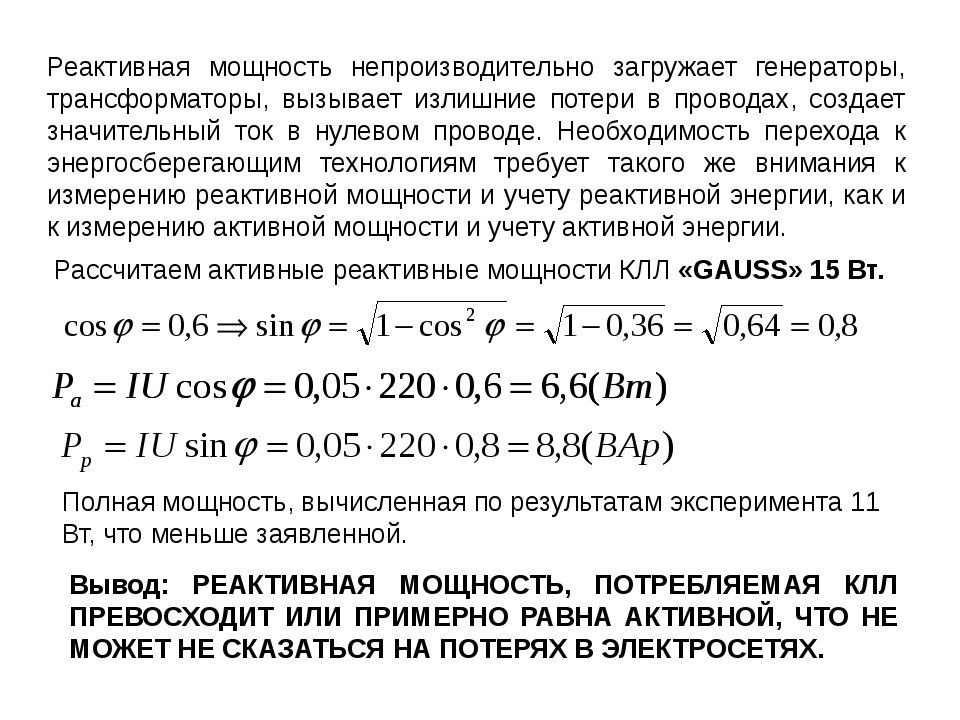
Як правило, споживачі (нагрівальні прилади, лампи розжарювання і т. д.) використовують тільки активну потужність, тому її має бути більше. Тим не менш, є прилади і з реактивною потужністю (двигуни, печі тощо). Тому на виробництві, як правило, застосовуються електролічильники, враховують як активну, так і реактивну складову повної потужності, напр. електролічильники Енергоміра СЕ302 S33 543 380V 5(10)A.
Тому на виробництві, як правило, застосовуються електролічильники, враховують як активну, так і реактивну складову повної потужності, напр. електролічильники Енергоміра СЕ302 S33 543 380V 5(10)A.
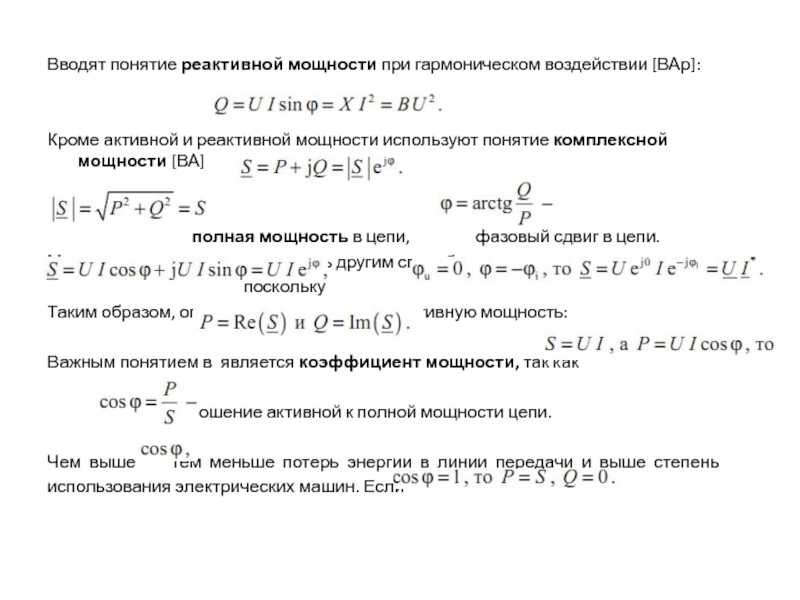
Іншими словами, якщо в ланцюзі струм співпадає з напругою, то це так звана АКТИВНА ПОТУЖНІСТЬ ( не електроенергія, такого поняття немає) . Якщо струм по фазі випереджає напругу або відстає від нього — це РЕАКТИВНА ПОТУЖНІСТЬ і вона не виробляє корисну роботу.
Косинус кута різниці фаз струму і напруги і є цей незрозумілий для споживачів косинус фі. Чим він менше, тим більше різниця фаз між струмом і напругою і тим менше буде вироблено корисної роботи електричним струмом. Чим ближче він до одиниці, тим більша частка корисної, активної потужності. А боротися з марними індуктивними струмами зазвичай намагаються, включаючи у схему додатковий конденсатор.Так що беріть кліщі, вимірюйте реактивку, якщо менше 0,9, ставте кондери відповідного номіналу і буде вам щастя! Бо зменшуючи реактив, ви зменшуєте і актив, це факт. Электрочетчик це теж покаже.
Электрочетчик це теж покаже.
Поняття активної потужності можна пояснити, використовуючи просту аналогію. Розглянемо будівельну тачку, показану на малюнку.
Для того, щоб зрушити машину з місця, очевидно, що необхідно застосувати силу до ручки. (направити силу на ручку).
Але сила застосовується в прямому напрямку тільки коли ми піднімемо тачку. В іншому випадку виникає перешкода для руху у вигляді підніжки (підставки) тачки.
Активна енергія – це те, що є результатом активної роботи, тобто просування тачки в прямому напрямку. Отже, активна енергія – це тільки зусилля, що прикладається до машини, щоб змусити її рухатися і таким чином виконувати реальну, тобто, корисну роботу.
Реактивної енергією можна вважати ту, яка допомагає тримати тачку піднятою.
Повна потужність (підняття (активна потужність) плюс штовхання (реактивна потужність)) — те, що в результаті застосовується до ручки тачки.
Лічильник реактивної енергії — це швидше всього, прилад невідомий нашим звичайним (домашнім) споживачам, які повсюдно використовують для розрахунків з енергопостачальною компанією лічильники активної енергії. Домашній користувач, таким чином, знаходиться в зручному положенні — платить тільки за корисну енергію і не повинен цікавитися який коефіцієнт потужності в його встановленні.
Домашній користувач, таким чином, знаходиться в зручному положенні — платить тільки за корисну енергію і не повинен цікавитися який коефіцієнт потужності в його встановленні.
А ось промислові споживачі — на відміну від першої групи — зобов’язані, на підставі підписаних договорів і часто під загрозою фінансових штрафів, підтримувати коефіцієнт потужності на належному рівні. Коефіцієнт tgφ глибоко укорінився в енергетичному законодавстві та його визначають як результат відношення реактивної потужності до активної потужності в даний розрахунковий період. Якщо повернутися на деякий час до трикутника потужності в синусоїдальних системах, то ми помітимо, що тангенс кута зсуву фаз між струмом і напругою дорівнює відношенню реактивної потужності Q до активної потужності P. Таким чином, критерій утримання tgφ нижче 0,4 не означає нічого іншого, як тільки визначення, що максимальний рівень підрахованою реактивної енергії не може бути вище, ніж 0,4 від значення отриманої активної енергії. Будь-споживання реактивної енергії вище домовленості підлягає додатковій оплаті.
Додатково про реактивної потужності можна почитати в наших статтях тут і тут
Регулирования активной и реактивной мощности синхронного генератора при подключении к сети
DOI: 10.32743/UniTech.2021.82.1-3.21-25
АННОТАЦИЯ
Регулирование активной и реактивной мощности генераторов при подключении к сети всегда было важным вопросом исследований электростанций и электрических сетей для эффективного использования энергии и стабильной работы двигателей. В повседневной жизни потребление электроэнергии в жилых домах постоянно меняется (больше ночью и меньше днем; больше летом и зимой, меньше весной и осенью), поэтому для рационального использования ресурсов и улучшения экономики необходимы мониторинг и регулирование активной мощности в реальном времени. В последнее время большинство приборов, подключенных к сети, являются индуктивными. Поэтому система питания должна загружать много реактивной мощности помимо активной. Согласно статистике, реактивная мощность, потребляемая промышленными предприятиями, необходимая асинхронному двигателю в энергосистеме, составляет 60–65 %, 20–25 % силовых трансформаторов и 10 % приходятся на воздушный электрические сети и другого оборудования [2]. Реактивная мощность, поставляемая энергосистемой, распределяется между всеми генераторами, что вызывает проблему того, сколько должен выдерживать каждый генератор и как регулировать реактивную мощность генераторов. В этой статье подробно анализируются методы регулирования активной и реактивной мощности, диапазон регулирования, угловые характеристики мощности и электромагнитное соотношение активной и реактивной мощности.
Согласно статистике, реактивная мощность, потребляемая промышленными предприятиями, необходимая асинхронному двигателю в энергосистеме, составляет 60–65 %, 20–25 % силовых трансформаторов и 10 % приходятся на воздушный электрические сети и другого оборудования [2]. Реактивная мощность, поставляемая энергосистемой, распределяется между всеми генераторами, что вызывает проблему того, сколько должен выдерживать каждый генератор и как регулировать реактивную мощность генераторов. В этой статье подробно анализируются методы регулирования активной и реактивной мощности, диапазон регулирования, угловые характеристики мощности и электромагнитное соотношение активной и реактивной мощности.
ABSTRACT
The regulation of active and reactive power of generators when connected to the grid has always been an important issue in the research of power plants and electrical networks for efficient use of energy and stable operation of motors. In everyday life, electricity consumption in residential buildings is constantly changing (more at night and less during the day; more in summer and winter, less in spring and autumn), therefore, real-time monitoring and regulation of active power is necessary for rational use of resources and improving the economy.
Ключевые слова: угол мощности, ток возбуждения, активное регулирование, регулирование реактивной мощности, статическая устойчивость.
Keywords: power angle, excitation current, active regulation, reactive power regulation, static stability.
1. Введение. В этой статье обсуждается, как отрегулировать активную и реактивную мощность после параллельного подключения генератора в основном для бесконечной электросети. Это означает, что изменение режима работы подключаемого генератора практически не может повлиять на изменение напряжения или частоты сети, где они остаются неизменными, т.е. = const и = const. Внутренний процесс анализируется с помощью векторной диаграммы или угла мощности при регулировке. Регулировка активной мощности должна изменить входную мощность первичного двигателя для изменения выходной мощности генератора в соответствии с характеристикой угла мощности. Если изменяется только ток возбуждения генератора, можно регулировать только реактивную мощность генератора.
2. При перевозбуждении выдается индуктивная реактивная мощность, а реакцией якоря является размагничивание; при слабом возбуждении генератор производит емкостную реактивную мощность и реакция якоря может усилиться (также может размагничиваться).
2. Регулирование реактивной мощности синхронного генератора и анализ его работы. Предпосылка анализа заключается в том, что в качестве примера берем двигатель со скрытым полюсом. Эффектом насыщения и сопротивлением якоря пренебрегаем. Тогда сеть рассматривается как бесконечная, напряжение – неизменным, а частота – нормальной.
2.1. Выход без нагрузки на стабильную активную мощность. Когда генератор не выдает активную мощность, потребляемую первичным двигателем, просто компенсируются различные потери и не выводятся электромагнитные потери (без учета потерь в меди статора), поэтому угол мощности δ = 0°, электромагнитная мощность = 0, как показано на рис. 1. В это время, хотя электродвижущая сила поля , напряжение сети U могут присутствовать и есть токовый выход, это реактивный ток. Когда входная мощность первичного двигателя увеличивается, входной крутящий момент увеличивается и ( – крутящий момент без нагрузки).
В это время выходная активная мощность генератора равна:
. (1)
Если это явнополюсный синхронный генератор, его угловая характеристика мощности равна:
. (2)
(2)
Также можно видеть, что угол мощности – это угол между осью магнитного полюса ротора и осью магнитного полюса воздушного зазора в пространстве и угол между электродвижущей силой возбуждения и напряжением U во времени [1–8].
Рисунок 1. Параллельно с бесконечной электросетью синхронный генератор вырабатывает активную мощность от холостого хода до стабильной выходной мощности
2.2. Регулировка активной мощности при статической и стабильной работе синхронного генератора. Активная мощность синхронного генератора, подключенного к системе большой мощности, регулируется мощностью первичного двигателя. При увеличении мощности первичного двигателя, т.е. вращающего момента первичного двигателя (паровой или гидравлической турбины), увеличивается активная составляющая тока генератора, одновременно с этим увеличивается и угол, что понижает запас устойчивости генератора.
Векторная диаграмма генератора с невыпадающими полюсами, например, показана на рисунке 2. Текущий ток можно контролировать с помощью:
; (3)
. (4)
Объяснение. Из рисунка видно, что по мере изменения активной мощности изменяется угол δ, а затем изменяется угол , изменяется I cos, а также изменяется I sin, то есть изменяется величина реактивной мощности, а также может поменяться характер. В частности, когда активная мощность увеличивается, ток возбуждения не изменяется, а активная мощность увеличивается, I cos увеличивается. Тогда увеличивается, затем sin увеличивается, то есть δ увеличивается и уменьшается, ток якоря I увеличивается, а угол коэффициента мощности уменьшается. Следовательно, угол δ мощности фактически отражает угол кручения синтетического магнитного поля статора, и тем больше электромагнитная мощность и электромагнитный момент .
Необходимые условия. Однако входная мощность от первичного двигателя не может быть увеличена без ограничений для увеличения электромагнитной мощности генератора. Для генератора со скрытыми полюсами, когда угол мощности δ достигает 90°, электромагнитная мощность достигает максимального значения . Если входная мощность от первичного двигателя увеличивается, новый баланс не может быть установлен и скорость двигателя будет постоянно увеличиваться и терять шаг и статическую устойчивость [2; 7; 1].
Рисунок 2. Синхронный генератор поддерживает постоянным ток возбуждения для регулировки активной мощности генератора
3. Регулирование реактивной мощности и анализ работы синхронного генератора. Если генератор подключен параллельно к сети в идеальных условиях, указанных выше, при исследовании регулирования реактивной мощности генератора также можно считать, что мощность электросети достаточно велика, а напряжение электросети и частота не изменятся.
Регулирование реактивной мощности и анализ работы синхронного генератора. Если генератор подключен параллельно к сети в идеальных условиях, указанных выше, при исследовании регулирования реактивной мощности генератора также можно считать, что мощность электросети достаточно велика, а напряжение электросети и частота не изменятся.
3.1. Анализ регулирования тока возбуждения без нагрузки. Когда ток якоря равен нулю, переключатель холостого хода замкнут, как показано на рисунке 3 (A), ток возбуждения является нормальным возбуждением; когда переключатель холостого хода замкнут, генератор не будет генерировать активную или реактивную мощность.
Если выходной сигнал первичного двигателя остается неизменным, ток возбуждения увеличивается, он будет в перевозбужденном состоянии, и генератор будет посылать обратный реактивный ток, чтобы вызвать реакцию размагничивания якоря, как показано на рисунке 3 (B).
Ток возбуждения начинает уменьшаться по сравнению с нормальным возбуждением, он будет в недовозбужденном состоянии, и генератор будет посылать опережающий реактивный ток для генерации реакции намагниченного якоря, как показано на рисунке 3 (C) [2; 8; 6; 7; 1].
Рисунок 3. Фазово-векторная диаграмма регулировки тока возбуждения без нагрузки
3.2. Регулировка реактивной мощности при активной нагрузке. Когда генератор нагружен активной нагрузкой и выходная активная мощность остается неизменной, взаимосвязь между током якоря генератора и током возбуждения также может быть проанализирована с помощью векторной диаграммы электродвижущей силы. Учитывая, что напряжение постоянно, а сопротивление не учитывается.
Если тогда:
Когда ток возбуждения регулируется для изменения , ток статора генератора и коэффициент мощности также изменяются соответственно. Из рисунка 3 видно, что векторная диаграмма активного тока I cos постоянная, вектор тока статора в конце траектории представляет собой горизонтальную линию AB, перпендикулярную вектору напряжения . Из формулы (5) и = , изменение вектора в конце и вектор напряжения параллельны прямой линии CD. В соответствии с вышеуказанными условиями на рисунке 4 представлены четыре типичные векторные диаграммы.
В первом случае нагрузка генератора только активной мощностью, без выхода реактивной мощности, минимальный ток статора для нормального возбуждения и cos = 1.
Во втором случае ток возбуждения увеличивается исходя из нормального возбуждения. В это время находится в сверхвозбужденном состоянии. Ток статора () ниже напряжения на клеммах.
В третьем случае ток возбуждения уменьшается на основе нормального возбуждения. В это время находится в недовозбужденном состоянии, а ток статора опережает напряжение на клеммах . В дополнение к активной мощности в сеть двигатель также передает в сеть расширенную емкостную реактивную мощность, что означает, что генератор поглощает индуктивную реактивную мощность из сети.
В четвертом случае необходимо дополнительно уменьшить ток возбуждения, электродвижущая сила еще больше уменьшится, угол мощности и ведущий коэффициент мощности cos будут продолжать увеличиваться, чтобы увеличить значение тока статора. Однако это изменение ограничено. Когда ЭДС холостого хода достигает генератор достигнет предельного состояния стабильной работы из-за предела угла мощности < 90°.
Когда ЭДС холостого хода достигает генератор достигнет предельного состояния стабильной работы из-за предела угла мощности < 90°.
Дальнейшее снижение тока возбуждения не сможет работать стабильно, а также потеряет статическую устойчивость.
Рисунок 4. Векторная диаграмма регулировки тока возбуждения при U = constant и = constant
4. Вывод. Регулирование активной мощности повлияет на изменение реактивной мощности. Когда активная мощность генератора увеличивается, уменьшение реактивной мощности будет вызвано постоянным током возбуждения и напряжением сети.
При регулировке тока возбуждения необходимо изменить реактивную мощность, хотя на значение активной мощности двигателя это не влияет, а ток якоря сначала уменьшается, затем увеличивается.
Если ток возбуждения установлен слишком низким, двигатель может потерять устойчивость и будет вынужден остановиться.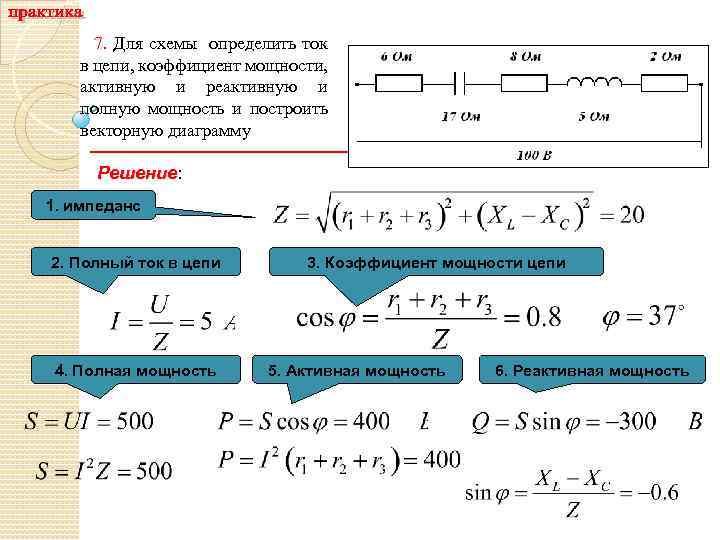
Список литературы:
- Веников В.А. Переходные электромеханические процессы в электрических системах : учебник для электроэнергет. спец. вузов. 4-е изд., перераб. и доп. – М. : Высшая школа, 1985. – 536 с.
- Князевский Б.А., Липкин Б.Ю. Электроснабжение промышленных предприятий : учебник. 2-е изд., перераб. и доп. – М. : Высшая школа, 1979. – 431 с.
- Повышение коэффициента полезного действия в результате изменения магнитодвижущей силы обмоток машин переменного тока / И.К. Исмоилов [и др.] // Проблемы современной науки и образования. – 2019. – № 11-1 (144).
- Проблемы качества электроэнергии в системах электроснабжения / З.З. Туйчиев [и др.] // Проблемы науки. – 2019. – № 10 (46).
- Электрические цепи, содержащие нелинейные элементы, и методы их расчета / Т.К. Жабборов [и др.] // Вестник науки и образования. – 2019. – № 19-2 (73).
- Юрганов А.А. Сравнение российских и зарубежных стабилизаторов режима // Электротехника, энергетика, электроника: сб.
 докл. науч. конф. – СПб. : СЗПИ, 2000. – С. 30–47.
докл. науч. конф. – СПб. : СЗПИ, 2000. – С. 30–47. - Юрганов А.А., Кожевников В.А. Регулирование возбуждения синхронных генераторов. – СПб. : Наука, 1996. – С. 61–88.
- Jicheng Li. Design and application of modern synchronous generator excitation systems / Li Jicheng, Tsinghua University, China. – Hoboken, NJ, USA : Wiley-IEEE Press, 2019.
 докл. науч. конф. – СПб. : СЗПИ, 2000. – С. 30–47.
докл. науч. конф. – СПб. : СЗПИ, 2000. – С. 30–47.Принцип управления активной и реактивной мощностью
1 Управление активной и реактивной мощностью в энергосистеме
Управление активной и реактивной мощностью можно описать двумя основными уравнениями:
- P = U1*U2/X*sin(разность фаз между U1 и U2).
В передающей сети напряжения не сильно изменяются в установившемся режиме, а X остается неизменным, поэтому на активную мощность может влиять только разность фаз напряжений. Из этого уравнения также видно, что существует связь между изменением напряжения и потоком активной мощности, которая становится очень важной в слабых системах.
Также мы видим, что P = 0, когда угловая разность между напряжениями равна 0.
2. Q = (U1*U1-U1*U2*cos(разность фаз между U1 и U2))/X
От Из этого уравнения мы можем видеть, что поток реактивной мощности является функцией разности напряжений, поскольку разность фаз в сети передачи относительно мала, следовательно, cos (разница фаз между U1 и U2) всегда будет оставаться близкой к 1 в установившемся режиме. операция.
Из этого уравнения видно, что существует связь между разностью фаз между U1 и U2 и потоком реактивной мощности, которую можно наблюдать, если фаза либо U1, либо U2 изменяется при ступенчатой характеристике.
Мы также можем видеть, что связь неизбежна, но становится терпимой в сетях с низким импедансом / высокой мощностью короткого замыкания. В слабых системах связь усложняет задачу.
2 Работа преобразователей и регулятор мощности Работа преобразователей не отличается от описанной выше. Преобразователи обычно подают напряжение (выход либо пропорционально-интегрального контроллера тока, либо напряжение, генерируемое любым другим способом, например, методом формирования сетки) на клеммы, к которым они подключены. Управление активной и реактивной мощностью точно следует двум уравнениям, описанным выше.
Управление активной и реактивной мощностью точно следует двум уравнениям, описанным выше.
Фазовый угол управляется изменением q-составляющей выходного напряжения преобразователя, а величина напряжения — изменением d-составляющей выходного напряжения преобразователя. Однако существует связь между d- и q-компонентами во вращающейся системе отсчета. Скорость вращения рамы определяется PLL.
Теперь, когда речь идет о преобразователях, необходимо учитывать некоторые аспекты, которые обсуждаются ниже.
Рассмотрим ситуацию, в которой импеданс преобразователя равен нулю, т.е. преобразователь подключен непосредственно к клемме без какого-либо импеданса. В таком случае X = 0, следовательно, P, как и Q, должны быть равны нулю. В идеальном случае это означает, что нет возможности управлять мощностью преобразователя через управление. Однако есть две ситуации, которые следует учитывать:
- Сильная сеть (низкий импеданс/высокая мощность короткого замыкания/высокая инерция): в этом случае преобразователь не сможет влиять на напряжение и фазу сети, поэтому P и Q от преобразователя будут равны 0.
- Слабая сеть (высокий импеданс/низкая мощность короткого замыкания/низкая инерционность): в этом случае преобразователь может влиять на напряжение и фазу сети, но это может привести к нестабильности, поскольку PLL склонен к нестабильности в слабых сетях. .
3 Нестабильность PLL
Рассмотрим систему, в которой небольшое возмущение возбуждает систему, и рассмотрим напряжение. Возмущение вызовет значительное изменение напряжения, если система слабая. Изменение вызовет колебания напряжения. Теперь, поскольку мы хотим синхронизировать наш преобразователь с помощью PLL, PLL может быть не в состоянии получить правильный угол, поскольку напряжение продолжает колебаться/искажаться, что, в свою очередь, приводит к тому, что преобразователь неправильно подает токи, поскольку PLL не может оценить правильный угол, что еще больше усугубляет ситуацию. Теперь учтите, что PLL работает быстро, это сделает ситуацию еще хуже, чем раньше. Представьте себе два преобразователя, пытающихся синхронизироваться с системой с малой инерцией/малой мощностью короткого замыкания.
4 Синхронизация / PLL и управление формированием сетки
Что касается управления формированием сетки, принцип остается тем же, единственное отличие состоит в том, что синхронизация больше не зависит от PLL, а зависит от других средств.
Идея синхронизации очень проста. Мы хотим ввести ток в сеть, наложив напряжение с определенной фазой на импеданс (в основном реактивное сопротивление). Теперь рассмотрим ситуацию, в которой угол наложенного напряжения не совпадает по фазе с напряжением сети, в которую мы хотим подавать токи. Это не сработает. Следовательно, PLL, который помогает нам получить угол сети, и мы синхронизируем наше управление с этим углом, следовательно, происходит правильное введение токов.
PLL можно заменить любым другим способом. Идея состоит в том, чтобы получить правильный угол сети, в которую должны вводиться токи.
5 Подача тока в слабую систему
Подача токов в слабую сеть критична.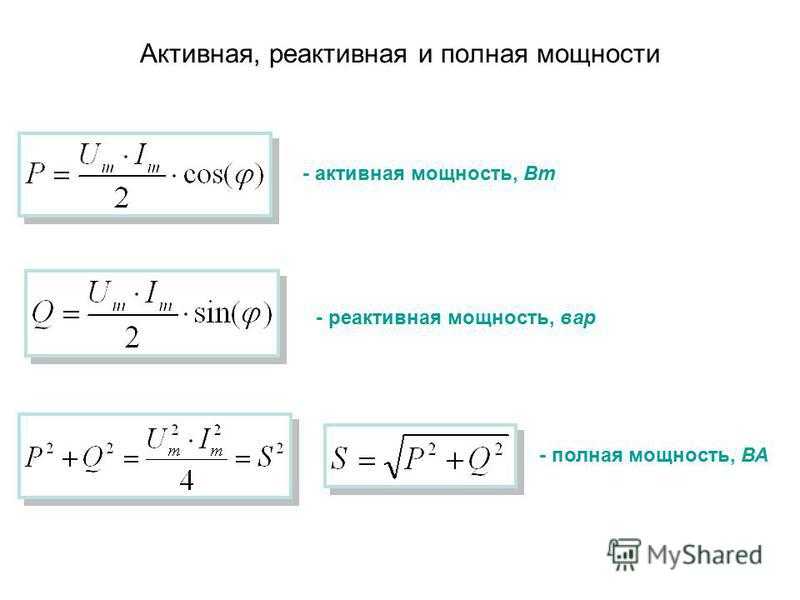 Система может быть не в состоянии поглотить вводимые токи, что приведет к коллапсу системы.
Система может быть не в состоянии поглотить вводимые токи, что приведет к коллапсу системы.
Рассмотрим ситуацию, когда напряжение сети становится равным 0 на клемме, к которой подключен преобразователь, из-за сплошного трехфазного короткого замыкания. Теперь преобразователь не будет измерять 0 p.u. напряжение, так как оно обычно подключается через импеданс к сети (я объяснил выше, почему). Управление преобразователем попытается ввести в сеть действительную и мнимую части токов в соответствии со стратегией управления внешним контуром, но сеть не сможет их поглотить, так как напряжение равно 0. В этом случае система только выживет. , если инжектируемые токи соответствуют полному сопротивлению сети, и именно здесь сетевые преобразователи выходят из строя и преобладают сеткообразующие преобразователи.
Еще один момент для размышления. Рассмотрим слабую систему, в которой преобразователь GF пытается синхронизироваться с помощью синхронизации питания. Синхронизация произойдет только в том случае, если преобразователь GF сможет подать мощность для получения правильного угла. Что произойдет, если сеть не сможет поглотить мощность? или есть более одного преобразователя GF?
Что произойдет, если сеть не сможет поглотить мощность? или есть более одного преобразователя GF?
6 Формирование сетки не означает поведение источника напряжения
И последнее замечание относительно управления формированием сетки. Регулятор GF не должен действовать как источник напряжения, единственное, о чем следует позаботиться, это правильная синхронизация и расчет опорных токов таким образом, чтобы инжектируемые токи не оказывали негативного влияния на систему.
Что означает коэффициент мощности?
Низкий коэффициент мощности снижает пропускную способность электрической системы за счет увеличения протекающего тока. Поэтому иметь низкий коэффициент мощности неэффективно и дорого. Но что такое коэффициент мощности и что на него влияет?
Типичная распределительная система ограничена по величине тока, которую она может нести; коэффициент мощности, выраженный в процентах, является показателем величины полного тока, который может быть использован для создания работы (активной мощности).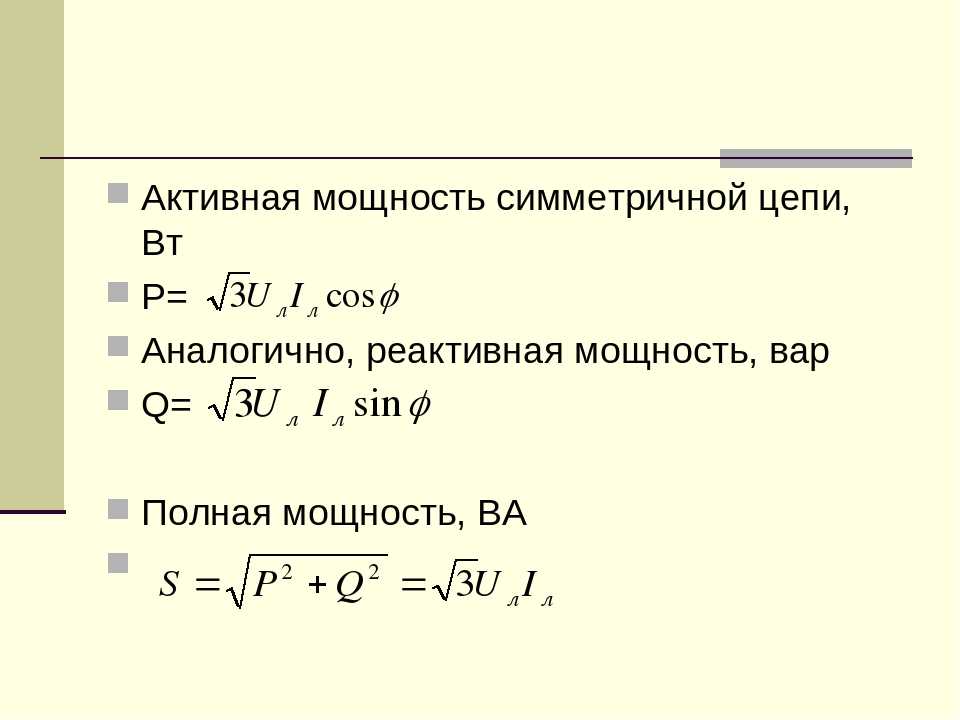 Чем ближе коэффициент мощности к 1,00 (100%), тем меньше ток, необходимый для выполнения указанной работы.
Чем ближе коэффициент мощности к 1,00 (100%), тем меньше ток, необходимый для выполнения указанной работы.
Например, нагрузка с коэффициентом мощности 0,80 означает, что только 80% мощности эффективно используется для выполнения работы. В идеальном мире вся мощность, получаемая из энергосистемы, должна быть преобразована в полезную работу, но в реальном мире это не так. Для полного описания коэффициента мощности необходимы сложные уравнения. Однако для более простого понимания Министерство энергетики США использует простую аналогию с мощностью, необходимой лошади, чтобы тянуть тележку по рельсам.
В идеале лошадь должна быть размещена перед вагоном, чтобы обеспечить наиболее эффективное тяговое усилие; однако это не всегда возможно. Угол буксировки отражает изменение коэффициента мощности: чем меньше угол, тем лучше коэффициент мощности, чем больше угол, тем ниже коэффициент мощности (рис. 1).
1. Углы влияют на полезную работу. Показанная здесь аналогия обеспечивает визуализацию, помогающую понять коэффициент мощности. Коэффициент мощности определяется как отношение реальной (рабочей) мощности к полной (полной) мощности. Если лошадь вести ближе к центру следа, угол бокового увода уменьшается, и реальная мощность приближается к значению кажущейся мощности. Источник: Министерство энергетики США Показанная здесь аналогия обеспечивает визуализацию, помогающую понять коэффициент мощности. Коэффициент мощности определяется как отношение реальной (рабочей) мощности к полной (полной) мощности. Если лошадь вести ближе к центру следа, угол бокового увода уменьшается, и реальная мощность приближается к значению кажущейся мощности. Источник: Министерство энергетики США |
Полная энергия, необходимая для тяги вагона, равна полной мощности. Фактическая энергия, движущая вагон, является реальной силой. Энергия, не используемая из-за угла тяги лошади, является реактивной мощностью. Другими словами, реальная мощность, также называемая рабочей мощностью (кВт), выполняет фактическую работу движения, тепла и света. Реактивная мощность или нерабочая мощность (кВар) поддерживает магнитное поле реактивной нагрузки (обычно индуктивной). Ток, используемый для создания реактивной мощности, не используется для создания работы; однако этот ток ложится бременем на систему распределения, поставщика электроэнергии и счета за электроэнергию объекта.
Векторная сумма рабочей мощности и нерабочей мощности равна общей мощности (полная мощность):
Полная мощность = √ (активная мощность 2 + реактивная мощность 2 )
, которая используется для расчета коэффициента мощности:
Коэффициент мощности = Активная мощность / Полная мощность = косинус угла (ϕ)
Основы напряжения и тока
Чтобы понять коэффициент мощности, мы должны сначала понять некоторые основы теории переменного тока (AC) и связанные с ней формы сигналов. Напряжение в системе переменного тока чередуется между положительным и отрицательным (в синусоидальной форме) и заставляет ток вести себя аналогичным образом. Это происходит 60 раз в секунду (в системе с частотой 60 Гц) в диапазоне от 0 до 360 градусов. В отличие от систем переменного тока, напряжение в системе постоянного постоянного тока (DC) не изменяется.
Поскольку мгновенное значение напряжения переменного тока постоянно изменяется, наука определила другую меру для величин переменного тока, а именно среднеквадратичное значение. Среднеквадратичное значение сигнала переменного тока дает тот же эффект нагрева, что и сигнал постоянного тока того же значения.
Среднеквадратичное значение сигнала переменного тока дает тот же эффект нагрева, что и сигнал постоянного тока того же значения.
Среднеквадратичное значение представляет собой квадратный корень из среднего арифметического квадратов набора мгновенных значений за период (цикл). Когда напряжение и ток являются чисто синусоидальными, среднеквадратичное значение напряжения и тока можно найти по пиковому (pk) напряжению и току:
V RMS = V pk / √2
119.5 V RMS = 169 V pk / 1.414
Similarly,
I RMS = I pk / √2
75 A RMS = 106 A pk / 1,414
Вы можете спросить себя, какое отношение это имеет к коэффициенту мощности? Для расчета мощности переменного тока требуется знание среднеквадратичного значения напряжения, среднеквадратичного значения тока и синусоидального фазового соотношения. Итак, резюмируя, среднеквадратичное значение — это мера нагревательного эффекта, рассчитанная по форме волны, которая позволяет сравнивать переменный ток с постоянным. Любой фазовый сдвиг от чистой синусоидальной формы сигнала указывает на коэффициент мощности.
Любой фазовый сдвиг от чистой синусоидальной формы сигнала указывает на коэффициент мощности.
Ниже приведено сравнение того, как коэффициент мощности влияет на выходную мощность кВА при двух разных однофазных нагрузках.
Для электрического обогревателя мощностью 9 кВт (120 В перем. тока, 75 А) с входным коэффициентом мощности (PF) 1,0:
P = √1ϕ x 120 В перем. тока x 75 A x 1,0 PF = 9 кВт
кВА = √1ϕ x 120 В переменного тока x 75 A = 9 кВА
Для зарядного устройства мощностью 9 кВт (120 В переменного тока, 75 A) с входным коэффициентом мощности 0,866:
P = √1ϕ x 120 В переменного тока x 86,6 A x 0,866 PF = 9 кВт
кВА = √1ϕ x 120 В переменного тока x 86,6 A = 10,392 кВА
Хотя каждая нагрузка потребляет 9 кВт мощности, входной коэффициент мощности зарядного устройства составляет 0,866. Более низкий коэффициент мощности требует для работы дополнительных 11,6 А, которые в конечном итоге предоставляются энергетической компанией. Необходимо не только приобрести дополнительный реактивный ток, но и увеличить размер распределительной системы, чтобы справиться с дополнительным током.
Что влияет на коэффициент мощности?
Коэффициент мощности относится к соотношению между активной (полезной мощностью) и полной (полной) мощностью. Это отношение является мерой того, насколько эффективно используется электроэнергия.
Линейные резистивные нагрузки. В системе переменного тока нагрузки классифицируются по способу потребления тока. Линейная резистивная нагрузка — это чисто резистивная нагрузка, не содержащая ни индуктивных, ни емкостных компонентов, таких как электрические обогреватели и лампы накаливания. Кривые напряжения и тока пересекают нулевую координату в одной и той же точке.
Кривая мощности (P) на рис. 2 рассчитывается по напряжению (V) и току (I), показанным в положительной области графика. В этом примере напряжение и ток составляют 120 ВСКЗ и 75 АСКЗ соответственно. Произведение двух равно 9кВА или 9 кВт. Напряжение и ток находятся «в фазе», и 100% мощности (рабочей мощности) эффективно используются для выполнения полезной работы. Коэффициент мощности для этого типа нагрузки равен 1,0.
Коэффициент мощности для этого типа нагрузки равен 1,0.
| 2. Линейные активные нагрузки. Напряжение и ток совпадают по фазе с коэффициентом мощности, равным 1,0 для чисто резистивных нагрузок. Предоставлено Ametek Solidstate Controls |
Линейные нерезистивные/реактивные нагрузки. Необычно найти чисто активные нагрузки; большинство нагрузок имеют дополнительную реактивную составляющую. Эти нерезистивные/реактивные нагрузки составляют большой процент всех нагрузок. Форма волны тока смещена от формы волны напряжения так, что она находится «в противофазе». Если нагрузка индуктивная, ток отстает от напряжения; если нагрузка емкостная, ток опережает.
Промышленные объекты, как правило, имеют отстающие нагрузки коэффициента мощности (индуктивные нагрузки). Этими типами нагрузок могут быть асинхронные двигатели, дроссели и трансформаторы. Нагрузки с опережающим коэффициентом мощности (емкостные нагрузки) менее распространены и обычно представляют собой подземные кабели или некоторые импульсные источники питания.
На рис. 3 та же нагрузка, что и на рис. 2, теперь имеет кривые напряжения и тока, сдвинутые по фазе на 30 градусов. Поскольку это индуктивная форма волны, ток теперь отстает.
| 3. Индуктивные нагрузки. Напряжение и ток не совпадают по фазе для линейных нерезистивных/реактивных нагрузок. В этом примере с индуктивной нагрузкой ток отстает от напряжения на 30 градусов при коэффициенте мощности 0,866. Предоставлено Ametek Solidstate Controls |
Нелинейные нагрузки — гармоники. Современные промышленные установки имеют не только активные, индуктивные и емкостные нагрузки, но многие из них также включают полупроводниковое оборудование, такое как импульсные источники питания, приводы постоянного тока, частотно-регулируемые приводы (VFD), электронный балласт, дуговые сварочные аппараты и датчики температуры. -управляемые печи. Это все нелинейные нагрузки или нагрузки, для которых ток несинусоидален, даже когда напряжение синусоидально.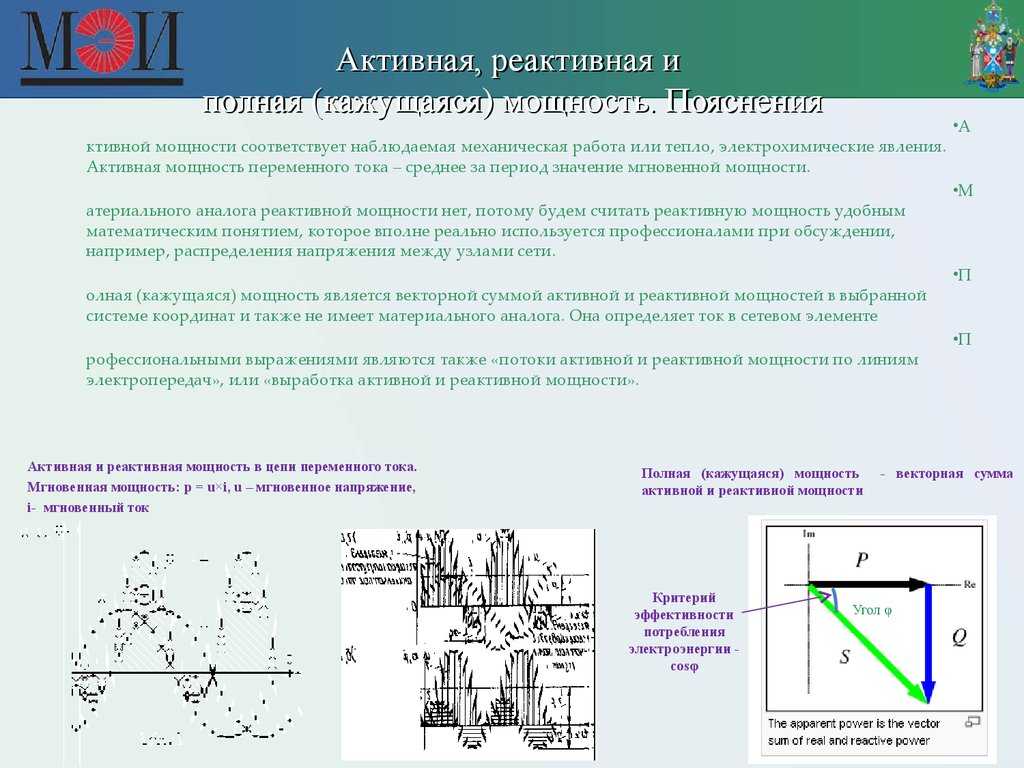 Несинусоидальный характер этих сигналов выражается с помощью гармоник.
Несинусоидальный характер этих сигналов выражается с помощью гармоник.
Гармоники — это сигналы различной амплитуды на частотах, кратных основной частоте напряжения (50 Гц или 60 Гц). Они накладываются на синусоидальную форму волны тока для создания общей формы волны тока. Рисунок 4 является примером такой формы волны тока.
| 4. Нелинейные нагрузки. На этом графике показаны формы сигналов напряжения и тока нелинейного источника питания с гармониками. Для наглядности он показан без 30-градусного фазового сдвига тока. Предоставлено Ametek Solidstate Controls |
Среднеквадратичное значение всего тока находится путем суммирования среднеквадратичного значения каждой гармоники тока. При частоте сигнала 60 Гц это означает, что частота 2-й гармоники будет равна 120 Гц (60 Гц x 2 = 120 Гц), а частоты 3-й, 4-й и 5-й гармоник будут равны 180 Гц, 240 Гц и 300 Гц соответственно. Гармоники, кратные основной частоте, могут быть выражены как 2f, 3f, 4f и т.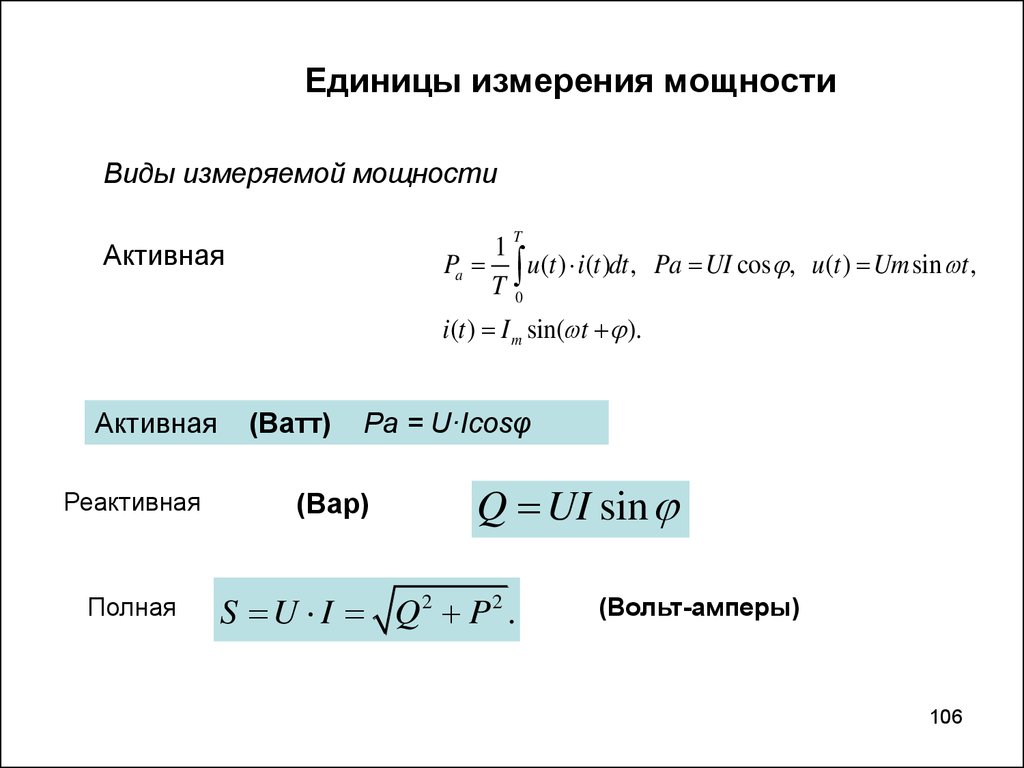 д.
д.
Текущее общее гармоническое искажение (THD) представляет собой сумму всех гармонических составляющих формы тока по сравнению с основной составляющей волны тока. . Как показано ниже, это отношение среднеквадратичного значения гармоник тока к среднеквадратичному значению основного тока.
I THD = среднеквадратичные гармоники тока / среднеквадратичные среды фундаментального тока = √ (I 2 2 + I 3 2 + I 4 2 +…) / I 1 4 4 4 4 4 4 4 4 1 4 4 1 4 4 4 4 4 4 4 2 +) / I 1 4 2 +) / I 1 4 2 +. x 100%
Для чисто синусоидальных сигналов фазовый сдвиг между напряжением и током достаточен для количественного определения коэффициента мощности (PF). Для сигналов, которые не являются синусоидальными, термин «коэффициент мощности смещения» (DpPF) используется для количественной оценки фазового сдвига между основными частотами двух сигналов (составляющими 50 Гц или 60 Гц). Для тех же несинусоидальных сигналов определен термин для количественной оценки влияния гармоник на коэффициент мощности. Этот термин называется коэффициентом мощности искажения (DF).
Для тех же несинусоидальных сигналов определен термин для количественной оценки влияния гармоник на коэффициент мощности. Этот термин называется коэффициентом мощности искажения (DF).
DF = 1 / √(1 + THD 2 )
Чтобы найти общий коэффициент мощности (PF T ), используется следующее уравнение:
Корреляции коэффициента мощности
Для линейных нагрузок треугольник мощности представляет собой прямоугольный треугольник, показывающий соотношение между рабочей, реактивной и полной мощностью. Соотношение между рабочей и полной мощностью – это PF. Значение может варьироваться от 0,0 до 1,0.
Рабочая мощность, также называемая истинной мощностью, реальной мощностью или активной мощностью, выполняет фактическую работу движения/нагрева/освещения и т. д. и измеряется в ваттах (Вт). Реактивная мощность поддерживает магнитное или электрическое поле в устройствах, таких как соленоидные катушки, обмотки двигателей, обмотки трансформаторов, конденсаторы и балласты, не выполняя реальной работы.