
Трехмерное пространство: векторы, координаты :: SYL.ru
Еще из школьного курса алгебры и геометрии мы знаем о понятии трехмерного пространства. Если разобраться, сам термин «трехмерное пространство» определяется как система координат с тремя измерениями (это знают все). По сути, описать любой объемный объект можно при помощи длины, ширины и высоты в классическом понимании. Однако давайте, как говорится, копнем несколько глубже.
Что такое трехмерное пространство
Как уже стало ясно, понимание трехмерного пространства и объектов, способных существовать внутри него, определяется тремя основными понятиями. Правда, в случае с точкой это именно три значения, а в случае с прямыми, кривыми, ломаными линиями или объемными объектами соответствующих координат может быть больше.
В данном случае все зависит именно от типа объекта и применяемой системы координат. Сегодня наиболее распространенной (классической) считается Декартова система, которую иногда еще называют прямоугольной. Она и некоторые другие разновидности будут рассмотрены несколько позже.
Кроме всего прочего, здесь нужно разграничивать абстрактные понятия (если можно так сказать, бесформенные) вроде точек, прямых или плоскостей и фигуры, обладающие конечными размерами или даже объемом. Для каждого из таких определений существуют и свои уравнения, описывающие их возможное положение в трехмерном пространстве. Но сейчас не об этом.
Понятие точки в трехмерном пространстве
Для начала определимся, что представляет собой точка в трехмерном пространстве. В общем-то, ее можно назвать некой основной единицей, определяющей любую плоскую или объемную фигуру, прямую, отрезок, вектор, плоскость и т. д.
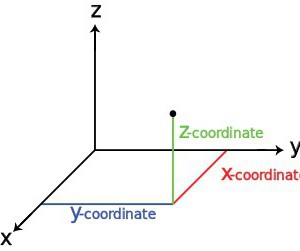
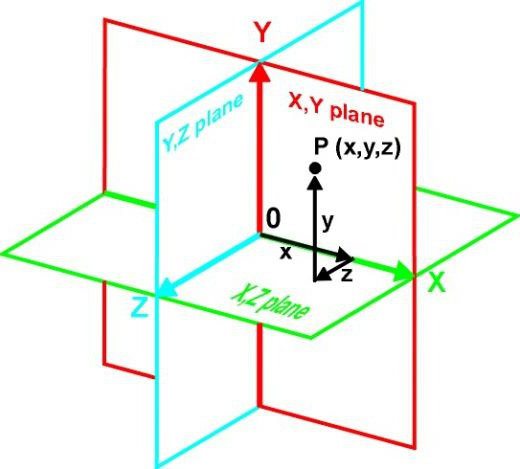
Сама же точка характеризуется тремя основными координатами. Для них в прямоугольной системе применяются специальные направляющие, называемые осями X, Y и Z, причем первые две оси служат для выражения горизонтального положения объекта, а третья относится к вертикальному заданию координат. Естественно, для удобства выражения положения объекта относительно нулевых координат в системе приняты положительные и отрицательные значения. Однако же сегодня можно найти и другие системы.
Разновидности систем координат
Как уже говорилось, прямоугольная система координат, созданная Декартом, сегодня является основной. Тем не менее в некоторых методиках задания местоположения объекта в трехмерном пространстве применяются и некоторые другие разновидности.
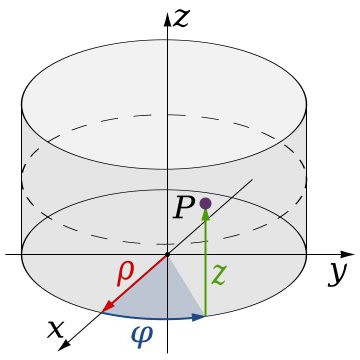
Наиболее известными считаются цилиндрическая и сферическая системы. Отличие от классической состоит в том, что при задании тех же трех величин, определяющих местоположение точки в трехмерном пространстве, одно из значений является угловым. Иными словами, в таких системах используется окружность, соответствующая углу в 360 градусов. Отсюда и специфичное задание координат, включающее такие элементы, как радиус, угол и образующая. Координаты в трехмерном пространстве (системе) такого типа подчиняются несколько другим закономерностям. Их задание в данном случае контролируется правилом правой руки: если совместить большой и указательный палец с осями X и Y, соответственно, остальные пальцы в изогнутом положении укажут на направление оси Z.
Понятие прямой в трехмерном пространстве
Теперь несколько слов о том, что представляет собой прямая в трехмерном пространстве. Исходя из основного понятия прямой, это некая бесконечная линия, проведенная через точку или две, не считая множества точек, расположенных в последовательности, не изменяющей прямое прохождение линии через них.
Если посмотреть на прямую, проведенную через две точки в трехмерном пространстве, придется учитывать по три координаты обеих точек. То же самое относится к отрезкам и векторам. Последние определяют базис трехмерного пространства и его размерность.
Определение векторов и базиса трехмерного пространства
Как принято считать, в трехмерной системе координат может существовать три основных вектора, которые определяют базис. При этом базисов с соответствующими независимыми тремя векторами может быть бесчисленное множество.

Заметьте, это могут быть только три вектора, но вот троек векторов можно определить сколько угодно. Размерность пространства определяется количеством линейно-независимых векторов (в нашем случае – три). И пространство, в котором имеется конечное число таких векторов, называется конечномерным.
Зависимые и независимые векторы
Что касается определения зависимых и независимых векторов, линейно-независимыми принято считать векторы, являющиеся проекциями (например, векторы оси X, спроецированные на ось Y).

Как уже понятно, любой четвертый вектор является зависимым (теория линейных пространств). А вот три независимых вектора в трехмерном пространстве в обязательном порядке не должны лежать в одной плоскости. Кроме того, если определять независимые векторы в трехмерном пространстве, они не могут являться, так сказать, один продолжением другого. Как уже понятно, в рассматриваемом нами случае с тремя измерениями, согласно общей теории, можно построить исключительно только тройки линейно-независимых векторов в определенной системе координат (без разницы, какого типа).
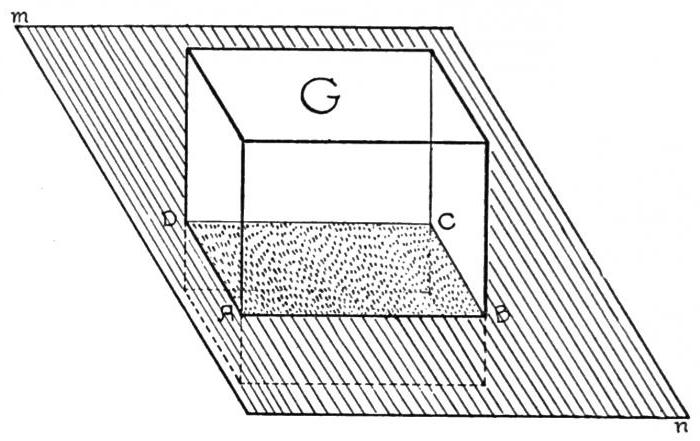
Плоскость в трехмерном пространстве
Если рассматривать понятие плоскости, не вдаваясь в математические определения, для более простого понимания этого термина, такой объект можно рассматривать исключительно как двумерный. Иными словами, это бесконечная совокупность точек, у которых одна из координат является постоянной (константой).
К примеру, плоскостью можно назвать любое количество точек с разными координатами по осям X и Y, но одинаковыми координатами по оси Z. В любом случае одна из трехмерных координат остается неизменной. Однако это, так сказать, общий случай. В некоторых ситуациях трехмерное пространство может пересекаться плоскостью по всем осям.
Существует ли более трех измерений
Вопрос о том, сколько может существовать измерений, достаточно интересен. Как считается, мы живем не в трехмерном с классической точки зрения пространстве, а в четырехмерном. Кроме известных всем длины, ширины и высоты, такое пространство включает в себя еще и время существования объекта, причем время и пространство между собой взаимосвязаны достаточно сильно. Это доказал еще Эйнштейн в своей теории относительности, хотя это больше относится к физике, нежели к алгебре и геометрии.
Интересен и тот факт, что сегодня ученые уже доказали существование как минимум двенадцати измерений. Конечно, понять, что они собой представляют, сможет далеко не каждый, поскольку это относится скорее к некой абстрактной области, которая находится вне человеческого восприятия мира. Тем не менее факт остается фактом. И не зря же многие антропологи и историки утверждают, что наши пращуры могли иметь некие специфичные развитые органы чувств вроде третьего глаза, которые помогали воспринимать многомерную действительность, а не исключительно трехмерное пространство.
Кстати сказать, сегодня существует достаточно много мнений по поводу того, что экстрасенсорика тоже является одним из проявлений восприятия многомерного мира, и тому можно найти достаточно много подтверждений.
Заметьте, что современными базовыми уравнениями и теоремами описать многомерные пространства, отличающиеся от нашего четырехмерного мира, тоже не всегда представляется возможным. Да и наука в этой области относится скорее к области теорий и предположений, нежели к тому, что можно явно ощутить или, так сказать, потрогать или увидеть воочию. Тем не менее косвенные доказательства существования многомерных миров, в которых может существовать четыре и более измерений, сегодня ни у кого не вызывают сомнений.
Заключение
В целом же, мы очень кратко рассмотрели основные понятия, относящиеся к трехмерному пространству и базовым определениям. Естественно, существует множество частных случаев, связанных с разными системами координат. К тому же мы постарались особо не лезть в математические дебри для объяснения основных терминов только для того, чтобы вопрос, связанный с ними, был понятен любому школьнику (так сказать, объяснение «на пальцах»).
Тем не менее, думается, даже из таких простых трактовок можно сделать вывод о математическом аспекте всех составляющих, входящих в базовый школьный курс алгебры и геометрии.
1. Трехмерное пространство. Векторы. Линейные операции над векторами.
4
Определение. Упорядоченная пара (а,в) двух ненулевых двумерных векторов а и в называются базисом числовой плоскости R2, если для любого вектора с R2 существуют такие числа αи β, что справедливо представле-
ние |
|
c = αa +βb | (1) |
|
При этом числа α и β называются аффинными координатами вектора с в базисе (а,в), а равенство (1) называется разложением вектора с по базису (а,в).
Определение. Упорядоченная тройка (а,в,с) трех ненулевых трехмерных векторов а,в,с называется базисом числового пространства R3 , если для любо-
го вектора с R3 существуют такие вещественные числа α,β,γ , что спра-
ведливо равенство |
|
d = αа+βв+ γ c | (2) |
При этом числа α,β,γ называются аффинными координатами вектора d в базисе (а, в, с), а равенство (2) называется разложением вектора d по базису (а, в,
с).
Рассмотрим важные частные случаи базиса.
1. Пусть i,j — единичные двумерные векторы, лежащие на осях координат соответственно OX и OY. Так как они неколлинеарны, то (i,j) — базис пространства R2. Тогда, для любого вектора с R2 существуют такие числа с1 и с2, что имеет место равенство
с = с1i+c2j,
которое записывается короче: с = (с1,с2).
Найдем координаты векторов i и j в базисе (i,j).
Пусть i = (i1,i2), j = (j1,j2). Тогда
i = i1i+i2j, j = j1i+j2j.
Откуда получаем: i1 = 1, i2 = 0, j1 = 0, j2 = 1; то есть i = (1,0), j = (0,1).
Базис (i,j) называется прямоугольным базисом в пространстве R2. 2. Пусть i,j,k — единичные трехмерные векторы, лежащие на осях ко-
ординат соответственно OX,OY,OZ. Так как они некомпланарны, то (i,j,k) — базис пространства R3. Тогда, для любого вектора с R3 существуют такие числа с1,с2,с3, что имеет место равенство
с = с1i+c2j+с3k,
которое записывается короче: с = (с1,с2,с3).
Аналогично, для координат векторов i,j,k в базисе (i,j,k) имеем: i = (1,0,0), j = (0,1,0), k = (0,0,1).
Базис (i,j,k) называется прям оугольным базисом в пространстве R3. Основное значение базиса состоит в том, что линейные операции над векторами при задании базиса становятся обычными арифметическими операциями над числами — координатами этих векторов. Именно справедлива следующая
теорема.
Векторы в трехмерном пространстве
В физике используется огромное множество различных понятий. Это неизбежно приводит к необходимости их классификации. Наиболее общей является классификация по так называемому тензорному признаку, так как все понятия, описывающие количественные характеристики физических объектов, являются тензорами, но тензорами различных рангов. Тензоры нулевого ранга называются скалярами. Тензоры первого ранга называются векторами. Эти два типа тензоров хорошо известны из школьных курсов математики и физики. Тем не менее, кратко напомним их определения и основные операции над ними.
Определение: физические величины, которые полностью характеризуются заданием одного вещественного числа, не зависящего от выбора системы координат, называются скалярами.
Примерами скаляров являются масса, объем, температура. Координаты вектора, однако, нельзя назвать скалярами, т.к. координаты вектора меняются при замене системы координат (смене базиса).
Следующей после скаляров ступенькой в классификации физических величин являются векторы или тензоры первого ранга. Векторы являются не столько математическими изобретениями, сколько элементами нашего интуитивного мышления.
В Природе существуют, по крайней мере, два принципиально несводимых друг к другу вида движения тел. Первый тип движения характеризует перенос (трансляцию) тела в пространстве. Второй тип характеризует изменение ориентации тела в пространстве. Оба типа движения интуитивно понятны человеку с рождения. Одной из причин такой понятности, возможно, является то, что человек начиная с эмбрионального состояния, вынужден совершать оба типа движений.
Соответственно двум типам движения существуют две формальные логические конструкции отображения объективной реальности. Это направленный отрезок (прямой вектор) и спин-вектор.
Два примера. Первый. Любой нормальный человек, например, гуляя по парку и увидев стрелку-указатель с надписью «Кафе 100 м» поймет, что нужно делать. Второй. Предложите группе людей, не математиков и не физиков, например, филологов, схематически изобразить на листке бумаги движение обычного вращающегося волчка. В «сухом остатке» у большинства картина будет примерно такой, как на рис. 1.
Рис. 1. Спин-вектор
Подведем итог. Чтобы задать направленный отрезок (прямой вектор), необходимо указать в физическом трехмерном пространстве (системе отсчета) направление и вещественное число (скаляр), называемое длиной (модулем) вектора. Чтобы задать спин-вектор, необходимо в физическом трехмерном пространстве задать прямую, называемую осью спин-вектора, затем указать направление вращения и поставить в соответствие данной конструкции вещественное число, называемое длиной (модулем) спин вектора. Данное число может характеризовать не только угол поворота, но и скорость поворота, и т.д.
Однако работать с двумя объектами различной природы неудобно. Тем более, что спин-векторам можно взаимно однозначно сопоставить прямые векторы, введя дополнительное соглашение, называемое ориентацией системы отсчета.
Пусть дан спин-вектор a*. Сопоставим ему прямой вектор a по следующим правилам:
а) вектор a
б) модуль a равен модулю a*;
в) вектор a направлен так, чтобы при взгляде с его конца круговая стрелка показывала вращение против хода часовой стрелки;
либо
г) вектор a направлен так, чтобы при взгляде с его конца круговая стрелка показывала вращение по ходу часовой стрелки.
Выбор одной из двух возможностей называется ориентацией системы отсчета. Важно осознать, что Природа ничего не знает о нашем произволе. Поэтому в используемых нами математических конструкциях для описания объективной реальности должны существовать средства компенсации данного произвола. Как мы увидим, основной объект обсуждения данной статьи – тензор поворота – не зависит от ориентации системы отсчета.
Определение: система отсчета называется называется правоориентированной, если трансляции и вращения в ней согласованы в соответствии с правилами а), б) и в). Система отсчета называется левоориентированной, если трансляции и вращения в ней согласованы в соответствии с правилами а), б) и г).
Таким образом, в ориентированной системе отсчета мы можем работать только с одним множеством объектов: множеством направленных отрезков. Однако в этом множестве все равно сохраняется различие между истинно прямыми и псевдопрямыми векторами, прообразами которых служат спин-векторы.
Для первого знакомства достаточно сказанных весьма общих слов про прямые и псевдопрямые векторы. Чтобы не уходить в сторону от главной задачи, оставим пока эту тему. Глубинное понимание различия понадобится лишь при введении понятия угловой скорости, что, возможно, будет сделано в одной из наших следующих статей.
Векторы на плоскости и в трехмерном пространстве — КиберПедия
Полагая, что понятия плоскости и трехмерного пространства известны читателю из школьного курса геометрии, обобщим, а в некоторых случаях уточним, начальные сведения о векторах.
Векторомназывается направленный отрезок с начальной точкой A и конечной точкой B, который можно перемещать параллельно самому себе.
Длиной (модулем, нормой) вектора называется число, равное длине отрезка AB, изображающего вектор.
Векторы называются коллинеарными, если они лежат на одной прямой или на параллельных прямых, и компланарными, если их количество равно трем и они лежат в одной плоскости или на параллельных плоскостях.
Если точки начала и конца вектора совпадают, например, то такой вектор называется нулевым вектором и обозначается: . Длина нулевого вектора равна нулю, т.е. . Поскольку направление нулевого вектора не определено, то его считают коллинеарным любому вектору.
Произведением вектора на число λ называется вектор: имеющий длину и направление, совпадающее с направлением вектора если λ > 0, и противоположное ему, если λ < 0.
Противоположным вектором вектору называется произведение этого вектора на число (− 1), т.е. .
Перенесем вектор параллельно самому себе таким образом, чтобы его начальная точка совпала с началом координат. Тогда можно ввести понятие координат вектора.
Координатами вектора называются координаты его конечной точки, если его начальная точка помещена в начало координат. При этом координатами вектора на плоскости являются числа , где M
В соответствии с приведенными определениями не трудно показать, что суммой векторов и будет вектор с координатами: , произведением вектора на число l будет вектор с координатами: .
Из тех же определений следует, что длина вектора равна квадратному корню из суммы квадратов его координат:
или .
соответственно, на плоскости и в трехмерном пространстве.
Скалярным произведением двух векторов называется число (скаляр), равное произведению длин этих векторов на косинус угла j между ними, т.е.: . Скалярное произведение векторов можно выразить и через координаты этих векторов:
или .
соответственно, на плоскости и в трехмерном пространстве.
Если , то очевидно угол между векторами и будет равен нулю, следовательно:
,
т.е. скалярный квадрат вектора равен квадрату его длины.
Очевидно, что косинус угла между векторами будет определяться выражением:
3.2. N-мерный вектор и векторное пространство
Определение. N-мерным вектором называется упорядоченная совокупность n действительных чисел: а каждое число хi называется i-ой компонентой(координатой) вектора.
По аналогии с векторами на плоскости (двухмерными векторами) и в трехмерном пространстве (трехмерными векторами) можно сформулировать следующие правила, которые следует рассматривать как аксиомы.
Два n-мерных вектора равнытогда и только тогда, когда равны их соответствующие компоненты, т.е. , если для всех .
Суммой двух n-мерных векторов называется n-мерный вектор, компоненты которого равны сумме соответствующих компонент слагаемых векторов, т.е. если то для всех .
Произведением n-мерного вектора на действительное число называется n-мерный вектор, компоненты которого равны произведению этого числа на соответствующие компоненты этого вектора, т.е. если , то для всех .
Операции над векторами, установленные этими правилами, принято называть линейными операциями. Линейные операции над векторами должны удовлетворять целому ряду свойств, рассматриваемых как аксиомы.
1. — коммутативное свойство суммы.
2. — ассоциативное свойство суммы.
3. — ассоциативное свойство относительно числового множителя.
4. — дистрибутивное свойство относительно суммы векторов.
5. — дистрибутивное свойство относительно суммы числовых множителей.
6. Существует нулевой вектор такой, что для любого вектора , в этом – особая роль нулевого вектора.
7. Для любого вектора существует противоположный вектор такой, что .
8. Для любого вектора справедливо , в этом – особая роль числового множителя 1.
Определение. Векторным (линейным) пространством называется множество векторов с действительными компонентами, в котором определены операции сложения векторов и умножения вектора на число, удовлетворяющие приведенным восьми аксиомам,
ПРИМЕР:Для заданной матрицы А размера mxnстроки этой матрицы можно рассматривать как множество n-мерных векторов.
5. Вектора в трёхмерном пространстве .
5.1. Угол между двумя векторами. Проекция вектора на ось.
Определение 5.1.1.
Углом
между векторами  называется
наименьший угол
называется
наименьший угол
j(0 Јj<p), на который надо повернуть один из векторов до его совпадения со вторым .
Определение 5.1.2.
Под
углом между вектором  и
осью l понимают угол j
между векторами
и
осью l понимают угол j
между векторами  и единичным вектором этой оси .
и единичным вектором этой оси .
Теорема 5.1.1.
Проекция
вектора  на ось l равна модулю вектора
на ось l равна модулю вектора  , умноженному на косинус угла j
между вектором и осью .
, умноженному на косинус угла j
между вектором и осью .
пр = п
= п пcosj
пcosj
Доказательство: Рассмотрим треугольник OBB1 : BB1 OB1

Рис.5.1.
Проекция суммы векторов на какую-нибудь ось равна алгебраической сумме проекций этих векторов на ту же ось.
Определение 5.1.3.
Произведение
проекции вектора  на ось
на ось  и единичного вектора
и единичного вектора  этой оси называется составляющей вектора
этой оси называется составляющей вектора  по оси l (см.Рис.5.2.).
по оси l (см.Рис.5.2.).
Состl =прl
=прl =
=

Рис.5.2.
5.2. Координаты вектора заданного двумя точками.
Пусть
в пространстве R3 дан вектор  ,
т. A(x1;y1;z1),
т.B(x2;y2;z2).
,
т. A(x1;y1;z1),
т.B(x2;y2;z2).
Введём
в рассмотрение 

Очевидно
, что 
Рис.5.3.
Вектора  и
и  в разложении по базису:
в разложении по базису: 
Чтобы найти координаты вектора, заданного двумя точками, нужно из соответствующей координаты конца вектора вычесть соответствующую координату начала данного вектора.
5.3.Условие коллинеарности двух векторов в координатной форме
Пусть
векторы  и
и  заданы в координатной форме:
заданы в координатной форме:

где  —
некоторое число, если
—
некоторое число, если  ,
тогда при умножении вектора на число
его координаты также умножаются на это
число .
,
тогда при умножении вектора на число
его координаты также умножаются на это
число .
 Следовательно
Следовательно  (5.2)
(5.2)
Для того чтобы два вектора были коллинеарны необходимо и достаточно чтобы их одноименные координаты были пропорциональны.
5.4. Скалярное произведение векторов в координатной форме
Пусть даны
в R3 вектора  и
и  ,
умножим
,
умножим 

Раскроем скобки применив распределительный закон умножения. Рассмотрим произведение орт:
т.к.
они перпендикулярны 
в результате упрощений получим:


Скалярное произведение двух векторов равно сумме произведений их одноимённых координат.
Условия перпендикулярности двух векторов.
Для того, чтобы два вектора были взаимно перпендикулярны, необходимо и достаточно чтобы сумма произведений их одноимённых координат была равна нулю: x1x2+y1y2+z1z2=0
5.5. Определение длины вектора и угла между двумя векторами.
Поскольку  то
то  (5.4.)
(5.4.)
Пусть 
 (5.5.)
(5.5.)
Модуль вектора равен квадратному корню из суммы квадратов его координат .
Если
вектор  задан
координатами т.A и т.B
задан
координатами т.A и т.B  ,
то модуль его равен:
,
то модуль его равен:
 (5.6.)
(5.6.)
Заметим, что
длина вектора  равна расстоянию между т. A и т. B.
равна расстоянию между т. A и т. B.
Пусть
даны  ,
,
т.к. 
 (5.7.)
(5.7.)
Пример 5.5.1.
Определите модуль вектора  ?
?
Решение: Применим формулу (5.5.)

Пример 5.5.2.
Определить
длину вектора  если
если 
—
угол между векторами  и
и 
Решение: применим формулу (5.4.)

Пример 5.5.3.
Определить угол В треугольника АВС с вершинами

Решение:
Построим
треугольник ABC (см. Рис.5.4.) и векторы  и
и  ,
,

Рис.5.4.

Найдем
координаты векторов  и
и  по формуле (5.1.)
по формуле (5.1.)
 ,
,  найдем по формуле (5.3.)
найдем по формуле (5.3.)
Применим формулу (5.7.):

Ответ: 
Пример
5.5.4. Даны три силы Найти величину равнодействующей силы
R и работу, которую она производит, когда
точка M1(0,1,0)
ее приложения, двигаясь прямолинейно,
перемещается в положение M2(1,0,1).
Найти величину равнодействующей силы
R и работу, которую она производит, когда
точка M1(0,1,0)
ее приложения, двигаясь прямолинейно,
перемещается в положение M2(1,0,1).
Решение: Найдем
равнодействующую сил 
 , найдем ее величину
, найдем ее величину  .
Искомая работа
.
Искомая работа  или
или  , найдем координаты
, найдем координаты  по формуле (5.1.)
по формуле (5.1.)  ={1;-1;1}
и по формуле (5.3.): A=201+9(-1)+121=23
.
={1;-1;1}
и по формуле (5.3.): A=201+9(-1)+121=23
.
определения, свойства, формулы, примеры и решения
Определение векторного произведения
Перед тем, как дать понятие векторного произведения, обратимся к вопросу о ориентации упорядоченной тройки векторов a→, b→, c→ в трехмерном пространстве.
Отложим для начала векторы a→, b→, c→ от одной точки. Ориентация тройки a→, b→, c→ бывает правой или левой, в зависимости от направления самого вектора c→. От того, в какую сторону осуществляется кратчайший поворот от вектора a→ к b→ с конца вектора c→, будет определен вид тройкиa→, b→, c→.
Если кратчайший поворот осуществляется против часовой стрелки, то тройка векторов a→, b→, c→ называется правой, если по часовой стрелке – левой.

Далее возьмем два не коллинеарных вектора a→ и b→. Отложим затем от точки A векторы AB→=a→ и AC→=b→. Построим вектор AD→=c→, который одновременно перпендикулярный одновременно и AB→ и AC→. Таким образом, при построении самого вектора AD→=c→ мы можем поступить двояко, задав ему либо одно направление, либо противоположное (смотрите иллюстрацию).

Упорядоченная тройка векторов a→, b→, c→ может быть, как мы выяснили правой или левой в зависимости от направления вектора.
Из вышесказанного можем ввести определение векторного произведения. Данное определение дается для двух векторов, определенных в прямоугольной системе координат трехмерного пространства.
Определение 1Векторным произведением двух векторов a→ и b→ будем называть такой вектор заданный в прямоугольной системе координат трехмерного пространства такой, что:
- если векторы a→ и b→ коллинеарны, он будет нулевым;
- он будет перпендикулярен и вектору a→ и вектору
Прямоугольная система координат в пространстве. Координаты вектора
В  классе мы с вами обсуждали прямоугольную систему координат. Тогда речь шла о плоскости: у нас были две перпендикулярные оси, и каждую точку плоскости мы задавали с помощью так называемых координат, то есть величин, которые требовалось «пройти» до данной точки от начала координат. (См. Рис. 1.)
классе мы с вами обсуждали прямоугольную систему координат. Тогда речь шла о плоскости: у нас были две перпендикулярные оси, и каждую точку плоскости мы задавали с помощью так называемых координат, то есть величин, которые требовалось «пройти» до данной точки от начала координат. (См. Рис. 1.)
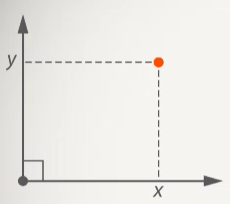
Рис. 1. Система координат на плоскости
С помощью координат было удобно решать разные задачи, но мы применяем их и в жизни. Например, в кинотеатре мы ищем свое кресло сначала по ряду, а затем по номеру в ряду. (См. Рис. 2.)
Рис. 2. Место в кинотеатре – модель координатной плоскости
Но мы живем не в двухмерном пространстве, а в трехмерном. Поэтому имеет смысл поговорить об аналоге уже привычной нам системы координат, перенеся ее в пространство.
Рассмотрим такую ситуацию. Предположим, что мы пошли не в кино, а на балет. У нас есть билет, на котором написаны ряд и место. Можем ли мы легко найти свое кресло? Да, если речь о партере. Но ведь мы можем сидеть и выше: в амфитеатре или на любом из ярусов. Поэтому в данном случае мы прибегаем к трем измерениям: сначала по высоте (ярус, амфитеатр или партер), затем уже ряд, а затем место. (См. Рис. 3.)

Рис. 3. Расположение мест в театре как пример трехмерной системы координат
Мы пользуемся координатами и тогда, когда выбираем товары в гипермаркете самообслуживания. Например, мы хотим купить стол и нам дается инструкция, что он находится в ряду, на  полке снизу, место номер
полке снизу, место номер  . Мы сначала ищем ряд (первая координата), затем – место (вторая), потом – полку (третья). Можно, разумеется, сначала найти полку, а потом место. Так или иначе, речь идет о трех координатах.
. Мы сначала ищем ряд (первая координата), затем – место (вторая), потом – полку (третья). Можно, разумеется, сначала найти полку, а потом место. Так или иначе, речь идет о трех координатах.
Рассмотрим произвольную точку  пространства. Проведем через нее три попарно перпендикулярные прямые. На каждой из них обозначим направление. Это и будут оси координат – теперь их стало три. Обратите внимание, что ось
пространства. Проведем через нее три попарно перпендикулярные прямые. На каждой из них обозначим направление. Это и будут оси координат – теперь их стало три. Обратите внимание, что ось направлена к нам, ось
направлена к нам, ось  вправо, а
вправо, а  – вверх. Порядок здесь важен, так как такие направления образуют так называемую правую тройку. (См. Рис. 4.)
– вверх. Порядок здесь важен, так как такие направления образуют так называемую правую тройку. (См. Рис. 4.)
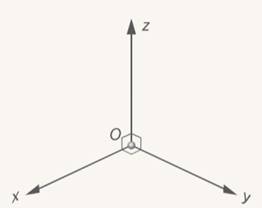
Рис. 4. Оси координат трехмерного пространства
Эту картинку можно поворачивать так, как нам удобно. Например, если мы ее повернем на  против часовой стрелки в плоскости
против часовой стрелки в плоскости  , то получим следующую картинку:
, то получим следующую картинку:  вправо, – вглубь, – вверх. (См. Рис. 5.)
вправо, – вглубь, – вверх. (См. Рис. 5.)
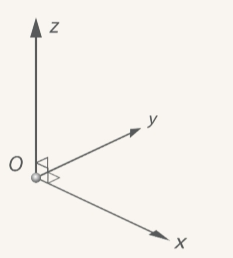
Рис. 5. Поворот «тройки» на против часовой стрелки в плоскости
Все это допустимые картинки, выбирайте любую из них. Некоторым удобна последняя, ведь она получается естественным образом из плоскостной. (См. Рис. 6.)
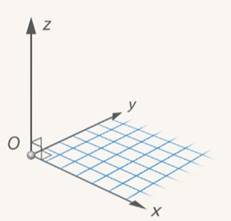
Рис. 6. К системе координат на плоскости добавили ось
Рассмотрим тройку векторов  ,
,  ,
,  , отложенных от одной точки . Эта тройка векторов называется правой, если векторы располагаются так, как расположены соответственно большой, указательный и средний пальцы правой руки. В противном случае тройка называется левой.
, отложенных от одной точки . Эта тройка векторов называется правой, если векторы располагаются так, как расположены соответственно большой, указательный и средний пальцы правой руки. В противном случае тройка называется левой.
На рисунке (См. Рис. 7.) справа изображена правая тройка векторов, а слева – левая. Это также полностью соответствует правилам правой и левой руки из физики.
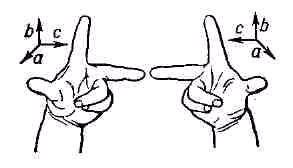
Рис. 7. Левая и правая тройки
Оси обозначаются (ось абсцисс), (ось ординат) и (ось аппликат). (См. Рис. 8.)

Рис. 8. Названия координатных осей
Соответствующие плоскости – ,  ,
,  – координатные плоскости. (См. Рис. 9.) Как и на плоскости, у каждой оси в пространстве есть положительное направление и отрицательное.
– координатные плоскости. (См. Рис. 9.) Как и на плоскости, у каждой оси в пространстве есть положительное направление и отрицательное.
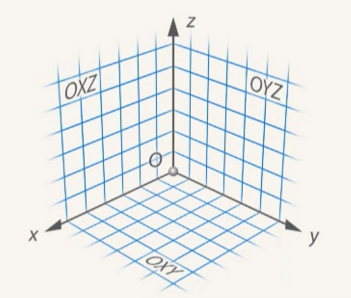
Рис. 9. Координатные плоскости
Координаты точки в пространстве определяются аналогично плоскостным. Рассмотрим произвольную точку  и проведем через нее плоскости, параллельные координатным. Эти плоскости пересекут наши оси в точках
и проведем через нее плоскости, параллельные координатным. Эти плоскости пересекут наши оси в точках  (точка пересечения параллельной плоскости с осью ),
(точка пересечения параллельной плоскости с осью ),  (точка пересечения параллельной плоскости с осью ) и
(точка пересечения параллельной плоскости с осью ) и  (точка пересечения параллельной плоскости с осью ). (См. Рис. 10.)
(точка пересечения параллельной плоскости с осью ). (См. Рис. 10.)
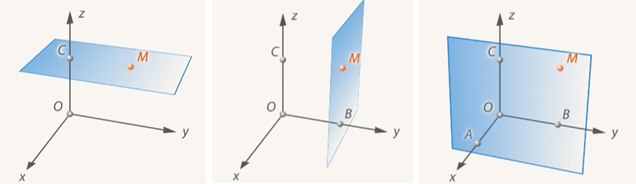
Рис. 10. Точки пересечения параллельных плоскостей с осями координат
Тогда абсцисса точки – это  (в случае если лежит на положительной полуоси) и
(в случае если лежит на положительной полуоси) и  , если – на отрицательной. (См. Рис. 11.)
, если – на отрицательной. (См. Рис. 11.)
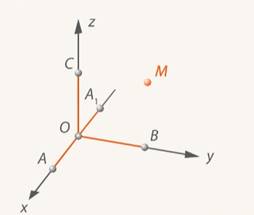
Рис. 11. Абсцисса точки в зависимости от расположения точки
Аналогично определяются ордината и аппликата. Записывают координаты в круглых скобках через точку с запятой:  , где
, где  ,
,  ,
,  (либо ,
(либо ,  ,
,  – в зависимости от расположения на осях координат). Не пишите координаты точки через запятую, чтобы не спутать с десятичными дробями.
– в зависимости от расположения на осях координат). Не пишите координаты точки через запятую, чтобы не спутать с десятичными дробями.
У точки могут быть и нулевые координаты, если она лежит в координатной плоскости. Например, если взять точку в плоскости , то ее координаты имеют вид  . А точка на оси имеет координаты
. А точка на оси имеет координаты  . Начало же координат – точка – имеет координаты
. Начало же координат – точка – имеет координаты  . (См. Рис. 12.)
. (См. Рис. 12.)
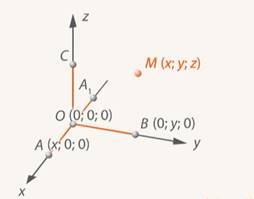
Рис. 12. Точки с нулевыми координатами
Как и на плоскости, отложим на каждой оси от начала координат в положительном направлении по вектору, длины которых будут равны  . Эти векторы называют единичными, или ортами. Обозначают их соответственно
. Эти векторы называют единичными, или ортами. Обозначают их соответственно  ,
,  ,
,  (См. Рис. 13.)
(См. Рис. 13.)
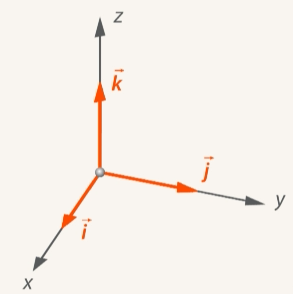
Рис. 13. Орты , , 
Эти векторы не компланарны, то есть не лежат в одной плоскости, а значит, каждый вектор пространства можно единственным образом разложить по векторам , , :  . Такие коэффициенты
. Такие коэффициенты  ;
;  ;
;  называют координатами вектора и пишут:
называют координатами вектора и пишут:  – в фигурных скобках. (См. Рис. 14.)
– в фигурных скобках. (См. Рис. 14.)
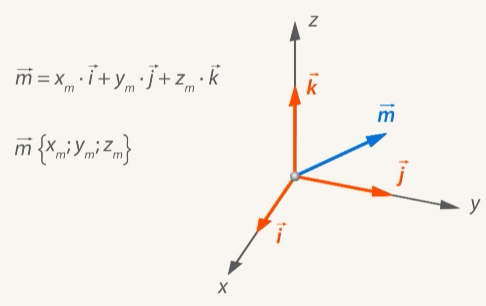
Рис. 14. Координаты вектора через орты
Так, например, вектор  .
.
На этом уроке мы познакомились с понятием «система координат в пространстве» и выяснили, как задаются координаты точки и координаты вектора.
Список литературы
- Атанасян Л.С. и др. Геометрия. Учебник для 10–11 классов. – 18-е изд. – М.: Просвещение, 2009. – 255 с.
- А.В. Погорелов. Геометрия 11 класс. – М.: Просвещение, 2002
- В.Ф. Бутузов, Ю.А. Глазков. Рабочая тетрадь по геометрии 11 класс, 2013
Дополнительные рекомендованные ссылки на ресурсы Интернет
- Yaklass.ru (Источник).
- Cleverstudents.ru (Источник).
- Alwebra.com.ua (Источник).
Домашнее задание
- На каких расстояниях от координатных плоскостей находится точка

- Определите, лежит ли данная точка на координатной оси. Если да, то укажите эту ось. , , , ,
- Определите, принадлежит ли данная точка координатной плоскости. Если да, то назовите ее. , , , , .

 ,
,  ,
,  ,
,  ,
, 
 ,
,  ,
,  ,
,  ,
,  .
.